第2章 线性时不变系统
信号与系统课件:第二章 LTI系统
2.1 离散时间LTI系统: 卷积和
(1)用移位单位抽样信号表示离散时间信号 (2)卷积和在离散时间信号LTI系统中的表征 (3)卷积和的计算 (4) 离散时间信号LTI系统的性质
(1)用单位抽样信号表示离散时间信号
x[n] ... x[1] n 1 x[0] n x[1] n 1... x[n][0] x[n 1][1]
(1)初始条件为n<0时,y(n)=0,求其单位抽样响应;
(2)初始条件为n≥0时,y(n)=0,求其单位抽样响应。
解:(1)设x(n) (n),且 y(1) h(1) 0 ,必有
y(n) h(n) 0, n 0
依次迭代
y(0) h(0) (0) 1 y(1) 1 0 1
2
当系统的初始状态为零,单位抽样响应h(n)就 能完全代表系统,那么对于线性时不变系统,任意 输入下的系统输出就可以利用卷积和求得。
差分方程在给定输入和边界条件下,可用迭代 的方法求系统的响应,当输入为δ(n)时,输出 (响应)就是单位抽样响应h(n)。
例:常系数差分方程
y(n) x(n) 1 y(n 1) 2
x[n]u[n] x[k]u[n k] x[k]
k
k
(ii)交换律:
yn xnhn hn xn
例子: 线性时不变系统中的阶跃响应 sn
sn unhn hnun
阶跃输入
输 单位抽样信号 入 响应的累加
n
sn hk
k
(iii)分配律:
xnh1n h2 n xnh1n xnh2 n
y(1) h(1) (1) 1 y(0) 0 1 1
2
22
y(2) h(2) (2) 1 y(1) 0 1 1 (1)2
第二章 线性不变系统.
§1.7 傅里叶变换 Fourier Transform
常用傅里叶变换对
5. {d (x-a)}=exp(-j2pfxa) {exp(j2pfax)}= d (fx-fa)
6.
1 {cos (2pf 0 x) [d ( f x f 0 ) d ( f x f 0 )] 2 1 {sin(2pf 0 x) [d ( f x f 0 ) d ( f x f 0 )] 2j
0
圆对称函数的F.T. 仍是圆对称函数, 称为F-B (傅-贝)变 换,记为
-1{G()}
G() =
{g(r)}, g(r) =
§1-2 二维傅里叶变换 2-D Fourier Transform
傅里叶-贝塞尔变换
例: 利用F-B变换求圆域函数的F.T.
1, r 1 , 定义: circ(r ) 0, 其它 r x2 y 2
1
是圆对称函数
{circ(r )} 2p rJ 0 (2pr )dr
0
作变量替换, 令r’ =2pr, 并利用:
J
0
2p 0
x
0 ( )d
xJ1 ( x)
J1 (2p )
{circ(r )}
1 2p
2
r ' J 0 (r ' )dr'
§1.7 傅里叶变换 Fourier Transform
用算符表示系统
g(x, y) = ℒ{f(x, y)}
线性系统定义:
输入
f(x, y)
ℒ{
}
输出
g(x, y)
令 g1(x, y) = ℒ{f1(x, y)}, g2(x, y) = ℒ{f2(x, y)} 若对任意复常数a1, a2有: ℒ{a1 f1 (x, y) + a2 f2 (x, y) } = ℒ{a1 f1 (x, y)} + ℒ{a2 f2 (x, y) } = a1 ℒ{f1 (x, y)} + a2 ℒ{f2 (x, y) } = a1 g1 (x, y) + a2 g2 (x, y)
数字信号处理第三版西科大课后答案第2章

第2章时域离散信号和系统的频域分析2.1学习要点与重要公式2.2FT和ZT的逆变换2.3分析信号和系统的频率特性 2.4例题2.5习题与上机题解答2.1学习要点与重要公式数字信号处理中有三个重要的数学变换工具,即傅里叶变换(FT)、Z变换(ZT)和离散傅里叶变换(DFT)。
利用它们可以将信号和系统在时域空间和频域空间相互转换,这方便了对信号和系统的分析和处理。
三种变换互有联系,但又不同。
表征一个信号和系统的频域特性是用傅里叶变换。
Z 变换是傅里叶变换的一种推广,单位圆上的Z变换就是傅里叶变换。
在z域进行分析问题会感到既灵活又方便。
离散傅里叶变换是离散化的傅里叶变换,因此用计算机分析和处理信号时,全用离散傅里叶变换进行。
离散傅里叶变换具有快速算法FFT,使离散傅里叶变换在应用中更加方便与广泛。
但是离散傅里叶变换不同于傅里叶变换和Z变换,它将信号的时域和频域,都进行了离散化,这是它的优点。
但更有它自己的特点,只有掌握了这些特点,才能合理正确地使用DFT。
本章只学习前两种变换,离散傅里叶变换及其FFT将在下一章学习。
2.1.1学习要点(1)傅里叶变换的正变换和逆变换定义,以及存在条件。
(2)傅里叶变换的性质和定理:傅里叶变换的周期性、移位与频移性质、时域卷积定理、巴塞伐尔定理、频域卷积定理、频域微分性质、实序列和一般序列的傅里叶变换的共轭对称性。
(3)周期序列的离散傅里叶级数及周期序列的傅里叶变换表示式。
(4)Z变换的正变换和逆变换定义,以及收敛域与序列特性之间的关系。
(5)Z变换的定理和性质:移位、反转、z域微分、共轭序列的Z变换、时域卷积定理、初值定理、终值定理、巴塞伐尔定理。
(6)系统的传输函数和系统函数的求解。
(7)用极点分布判断系统的因果性和稳定性。
(8)零状态响应、零输入响应和稳态响应的求解。
(9)用零极点分布定性分析并画出系统的幅频特性。
2.1.2重要公式(1)这两式分别是傅里叶变换的正变换和逆变换的公式。
第二章 线性时不变系统的时域分析
基本内容: 基本内容: (1) 系统的定义及表示 ) (2) ) 系统的基本性质 (3) ) 线性时不变系统的时域描述 (4) ) 零输入响应和零状态响应 (5) ) 单位冲激响应
重点难点: 重点难点: 零状态响应的求解方法 响应的求解方法; (1) ) 零状态响应的求解方法; 冲激响应的求解方法; (2) ) 冲激响应的求解方法;
4.稳定性 稳定性
有界输入产生有界输出,则这个系统就 是稳定系统。 所谓有界,即输入或输出的最大幅值是 一个有限值。 例系统 y[n]=nx[n] 就是一个不稳定系统, 因为,当输入 x[n] 是有界时,系统的输 出却有界,它将随着 n 值的增加而增加, 直至无穷。
三、线性时不变系统的时域描述
线性时不变系统也简称为LTI系统,其 系统, 线性时不变系统也简称为 系统 分析方法建立在信号分解的基础之上。 分析方法建立在信号分解的基础之上。 线性时不变系统具有的线性和时不变性, 线性时不变系统具有的线性和时不变性, 其响应必然是系统对这些基本信号响应 的组合。 的组合。 连续时间LTI系统用微分方程描述; 系统用微分方程描述; 连续时间 系统用微分方程描述 离散时间LTI系统用差分方程描述。 系统用差分方程描述。 离散时间 系统用差分方程描述
这个常系数线性微分方程, 这个常系数线性微分方程,其完全解由 齐次解和特解两部分组成 。 齐次解是微分方程在输入为0时的齐次 齐次解是微分方程在输入为 时的齐次 方程的解( 方程的解(式2.111) ) 而特解则是在输入的作用下满足微分方 程式(2.109) 的解。 的解。 程式
对于式(2.109)的微分方程,相应的齐次 方程为
如果系统的起始状态y(0-)≠0,则系统的 输出 y(t) 和系统的输入 x(t) 之间就不满 足线性和时不变性。然而,只要 y(0-)=0, y(t) 和 x(t) 之间就能够满足 线性和时不变的关系。
奥本海姆《信号与系统》配套题库【章节题库】(线性时不变系统)

4 / 53
圣才电子书 十万种考研考证电子书、题库视频学习平台
解:(1)系统 y(n)=2x(n)是线性的
该系统是时丌变的,由
,得
该系统是因果的,因为输出在 n 时刻值只不当前 n 时刻的输入有关。 (2)系统 y(n)=(2n)是线性的
【解析】A 项,y( t ) tf ( t ) ;B 项,y( t ) f ( t 1) ;C 项,y( t ) f ( t ) f ( t ) ; 2
D 项, y( t ) f ( t ) f ( t ) 2
当 af1( t ) bf2( t ) ay1( t ) by2( t ) , f ( t t0 ) y( t t0 ) 时,系统是线性时丌变系
统,只有 B 项是线性时丌变系统
2.f(k+3)*δ(k-2)的正确结果为( )。 A.f(5)δ(k-2) B.f(1)δ(k-2) C.f(k+1) D.f(k+5)
1 / 53
圣才电子书
【答案】C
十万种考研考证电子书、题库视频学习平台
【解析】任意序列不脉冲序列的卷积 x( k k1 )* ( k k0 ) x( k k1 k0 ) 。*u(t)( )
【答案】√
【解析】由于 f (t) * (t) f (t) ,利用卷积的积分特性:
t
t
t
f ( )d [ f (t) * (t)]dt f (t) * (t)dt f (t) *u(t)
三、填空题 设 x(t) et 0.5 (2t 1) ,则 x(t) =_________。 【答案】 0.5 (t 0.5) 【解析】因为 x(t) et 0.5 (2t 1) (2t 1) 0.5 (t 0.5) ,所以 x(t) 0.5 (t 0.5) 。
第二章 时域离散信号和系统(数字信号处理)

第二章 时域离散信号和系统
6. 复指数序列
x(n)=e(σ+jω0)n 式中ω0为数字域频率,设σ=0,用极坐标和实部虚 部表示如下式: x(n)=e jω0n
x(n)=cos(ω0n)+jsin(ω0n)
由于n取整数,下面等式成立: e j(ω0+2πM)n= e jω0n, M=0,±1,±2…
第二章 时域离散信号和系统
图1.2.5 正弦序列
第二章 时域离散信号和系统
则要求N=(2π/ω0)k,式中k与N均取整数,且k的取
值要保证N是最小的正整数,满足这些条件,正弦序列 才是以N为周期的周期序列。
正弦序列有以下三种情况:
(1)当2π/ ω0为整数时,k=1,正弦序列是以2π/ ω0 为周期的周期序列。例如sin(π/8)n, ω0 =π/8,2π/ ω0 =16,该正弦序列周期为16。
例 设x(n)=R4(n),h(n)=R4(n),求y(n)=x(n)*h(n)。
解 按照公式,
y (n )
m
R ( m) R ( n m)
4 4
上式中矩形序列长度为4,求解上式主要是根据矩
形序列的非零值区间确定求和的上、下限,R4(m)的非
令n-k=m,代入上式得到
u( n )
n
( m)
n
第二章 时域离散信号和系统
u(n) 1 „ n 0 1 2 3
单位阶跃序列
第二章 时域离散信号和系统
3. 矩形序列RN(n) 1, RN(n)= 0, 0≤n≤N-1 其它n
上式中N称为矩形序列的长度。当N=4时,R4(n)的
第二章 时域离散信号和系统
第2章 时域离散信号和系统
第二章 线性时不变系统
9
例5 y[n] 6,5,24,13,22,10,n 0,1,2,3,4,5 h[n] 3,1,4,2 n 0,1,2,3
y[n] x[n]h[n] 求 x[n]
2 t 5t2 x(t)
x[n] x[k] [n k] 离散的信号分解成脉冲
k
信号的 线性组合的形式
把任意一个序列表示成一串移位的单位脉冲序列 [n k]
的线性组合,而这个线性组合式中的权因子就是 x[k]
4
二. 离散时间线性时不变系统卷积和表示
[n] h[n]
[n k] h[n k]
时不变
x[k] [n k] x[k]h[n k] 齐次性
11
二. 连续时间线性时不变系统的卷积积分表示
(t) h (t)
(t k)
x(k) (t k)
x(k) (t k)
k
h (t k)
时不变
x(k
)h
(t
k
)
齐次性
x(k)h (t k) 可加性
k
xˆ(t)
yˆ (t )
y(t) x( )h(t )d x(t) h(t)
12
卷积的计算
(1)由定义计算卷积积分
例:设某一线性时不变系统的输入为x(t),其单位冲
激响应为h(t) x(t) eatu(t) , a 0 h(t) u(t)
试求 x(t) h(t)
x(t) h(t) ea u( )u(t )d
t ea d ,
0
t0
0,
t0
1 1 eat u(t) a
1
信号与系统王明泉第二章习题解答
其 值
方程特征根 , ,故零输入响应
将初始值代入上式及其导数,得
由上式解得 , ,所以
(2)零状态响应 是初始状态为零,且 时,原微分方程的解,即 满足方程
即
及初始状态 。先求 和 ,由于上式等号右端含有 ,令
积分(从 到 )得
将 、 和 代入微分方程可求得 。对以上三式等号两端从 到 积分,并考虑到 , ,可求得
解:(1)求齐次解
特征方程为:
特征根为:
所以,
(2)求特解
(3)全响应
将 代入系统方程得
(1)
将初始条件代入
得:
所以全响应为:
2.5 已知描述某线性时不变连续系统的微分方程为
,
当激励为 时,系统的完全响应为 , 。试求其零输入响应、零状态响应、自由响应和强迫响应。
解:由全响应得初始条件 ,
(1)求零输入响应
在时域中,子系统级联时,总的冲激响应等于子系统冲激响应的卷积。
因果系统的冲激响应为
(2)阶跃响应
一线性时不变系统,当其初始状态为零时,输入为单位阶跃函数所引起的响应称为单位阶跃响应,简称阶跃响应,用 表示。阶跃响应是激励为单位阶跃函数 时,系统的零状态响应
阶跃响应 与冲激响应 之间的关系为
或
2.2.6卷积积分
(1)卷积积分的概念
一般情况下,如有两个信号 和 做运算
此运算定义为 和 的卷积(Convolution),简记为
或
(2)卷积积分的图解法
用图解法能直观地说明卷积积分的计算过程,而且便于理解卷积的概念。两个信号 和 的卷积运算可通过以下几个步骤来完成:
第一步,画出 和 波形,将波形图中的 轴改换成 轴,分别得到 和 的波形。
信号处理与系统分析 第2章线性时不变系统
从波形的角度来观察离散时间信号,它可以 看成是由许多加权了的单位冲激信号组合 而成的
x[n] x[1] [n 1] x[0] [n] x[2] [n 2]
对于任意的离散时间信号:
累加序号 自变量
加权值 移位的冲激信号
x[n]
k
x[k ] [n k ]
n
卷积公式是无穷多项求和,而我们实际遇到的常 常是有限长度序列,特别是在计算机离线处理的场 合,因为计算机不可能处理无穷多的信息。 在进行有限长度的序列的卷积时候,长度为N和M 的2个序列作卷积时,反转序列从左到右进入重叠 直至移出重叠,只有存在重叠项时,卷积和才可能 非零。 卷积序列的长度为M+N-1。
求解系统响应的卷积方法是系统分析的重要工具。
单位冲激响应h[n]完全描述了线性时不变系统的变换 规律。不同的系统输入,都在h[n]的作用下产生相应的 响应,因此,给定了一个LTI系统的单位冲激响应h[n]就 等于给定了该系统。
从计算某一个特定点的角度来看
yy [n [n 0]
k k
第2章 线性时不变系统
线性时不变(简称LTI,Linear, Time-invariant)系统
为什么引入LTI ?
如果不对系统的性质加以限制,那么分析 一个系统将是十分困难的。 给系统加上线性和时不变性的限制,那么 系统的分析将变得十分简便。 LTI系统的分析还为非线性系统的分析方法 提供了思路。例如,线性时不变系统可以 用冲激响应来表达,非线性系统可以用 Volterra级数来表达。
上式应该理解为许多以为n自变量的函数的相 加,而不是数值相加。
许多移了位的冲激信号的加权和,构成了x[n] 。
特别地,我们有
线性时不变系统--习题
dt
dt
dt
et t et t
t t t
t
方法二没有注意利用冲激函数的性质,求解过
程较繁。另外,对冲激偶信号的性质
f t t f 0 t f 0 t
往往被错误写成
f t t f 0 t
从而得出错误结论。
(2) f t t e3 δτ d τ
1 O t 3 1
t
t 3 1
t
3
1
即2 t 4
g(t) 1 1(t )d t 2 t 2
t3 2
42
T4
1 f1
f2 t
t
1 O
1 t3
t-31
即t 4
gt 0
卷积结果
f1t
1
1 O 1 t
f2 t
3
2
O
3t
t2 t 1
g(t
)
4 t
t
2
2
4
x(t t0 ) h(t) x(t) h(t t0 ) y(t t0 )
例1 粗略绘出下列各函数式的波形图
(1) f1t u t2 1
(2)
f2 t
d dt
et cos tut
描绘信号波形是本课程的一项基本训练,在绘 图时应注意信号的基本特征,对所绘出的波形,应标 出信号的初值、终值及一些关键的值,如极大值和极 小值等,同时应注意阶跃、冲激信号的特点。
设x3(t) ax1 t bx2 t x3 t y3 t x32 t ax1 t bx2 t 2 a2 x12 t b2 x22 t 2abx1 t x2 t
a2 y1 t b2 y2 t 2abx1 t x2 t ay1 t by2 t
线性时不变系统的基本特性

x(t) cx1(t) y(t) ax(t) b acx1(t) b cy1(t)
系统也不满足齐次性。
由线性,可以得到系统的一个结果是:在全部时间上系 统输入为零,必然输出为零,即零输入产生零输出。
N
N
x(t) ak xk (t) 0 xk (t) 0
判断一个系统是否满足某种特性,只要能找到一个例 子不满足,就可证明其不满足此特性。
例如: 设系统的输入输出之间的关系为:
y(t) x(2t)
即如图所示:
x(t) 系统
x(t)
y(t) x(2t) y(t)
1
1
t
1
1 2
1
t
x(t) x(t)
系统
y(t) x(2t) y(t)
1
1
t
x(t 1)
k 1
k 1
N
N
y(t) ak yk (t) 0 yk (t) 0
k 1
k 1
而
y(t) ax(t) b a 0 b b
即在零输入时,系统输出不为零。这部分不为零的输出, 称为系统的零输入响应。
二、时不变性 x(t) 系统
x(t t0 )
y(t) y(t t0 )
例如:设系统的输入输出之间的关系为:
1
t 1 2
1
1 2
1
t
y1 (t )
y(t
1 2
)
1
1 2
1
t
所以系统是一时Biblioteka 系统。综合线性与时不变性,可表示为:
N
x(t) ak xk (t tk ) k 1
N
y(t) ak yk (t tk ) k 1
线性系统理论(郑大忠)第2章
2013/11/22
线性系统理论
23
第2章 线性系统的状态空间描述
广东工业大学 自动化学院 自动控制系 陈玮
1、电路系统状态空间描述的列写示例
R1 C + uC iL R2 iC + -
由此,得 和,
X QX
X PX PQX
X QX QPX
显然, PQ QP I
即矩阵P和Q互逆。
结论:系统的任意选取的两个状态X和 X 之间 为线性非奇异变换的关系。
2013/11/22
线性系统理论
18
第2章 线性系统的状态空间描述
广东工业大学 自动化学院 自动控制系 陈玮
2013/11/22
线性系统理论
2
第2章 线性系统的状态空间描述
广东工业大学 自动化学院 自动控制系 陈玮
一、状态和状态空间
1、系统动态过程的两类数学描述 2、状态和状态空间的定义
2013/11/22
线性系统理论
3
第2章 线性系统的状态空间描述
广东工业大学 自动化学院 自动控制系 陈玮
1、系统动态过程的两类数学描述
线性系统理论
21
第2章 线性系统的状态空间描述
广东工业大学 自动化学院 自动控制系 陈玮
1、电路系统状态空间描述的列写示例
电路系统如图所示,设各组元件的参数值为已 知,取电压源e(t)为输入变量,电阻R2端电压uR2为输 出变量。 C
R1 iC + e (t ) -
L
+ uC iL R2
信号与系统概论PPT第二章线性时不变系统的时域分析2
f t* t t0 f t t0
2) 信号与阶跃信号的卷积等于信号积分
f t*ut t0 f t* 1t t0 f t* t t0 1 f 1 t t0
第三节 卷积与卷积和、解卷积
卷积重要性质: 3) 信号与冲激偶的卷积等于信号微分
t
2
t
2
*
r
t
2
r
t
2
r t r t r t r t
r t 2r t r t
f(t)
f(t)
1
1
=
0 t 22
(a)
0 t 22
(b)
f΄(t)
f (-1)(t)
1
2 0 2
τ
t
0
22
=
t
(c)
(d)
f(t)f(t) τ
-τ 0 τ t 22
m
f1 m f2 n m mMaxn,0
第三节 卷积与卷积和、解卷积
重要结论:信号与冲激信号(脉冲信号) 的卷积(卷积和),其结果就是对该信号 进行移位,位移量取决于冲激(脉冲)信 号出现的位置。该结论也可视作信号通过 移位系统得到的零状态响应。
f
t*δt
t0
f
t
δ
t0 d
f
t
注意此处的 处理方式
ut 1 t1e d ut 1 t1e d
0
0
1
1
e t 1
u t Hale Waihona Puke 1 et1u t 1
例2-8:计算 cost* t 1 t 1
解:
M
M
f t* wi t ti wi f t ti
第2章-线性时不变系统
卷积和:对位相乘法
计算 x 1n x 2n ,其中
x 1 n 2 n n 1 4 n 2 n 3 x 2n 3 n n 1 5 n 2
x1 n : x2 n:
2 1 41 3 15
10 5 20 5
21 4 1
6 3 12 3
x1n x2 n: 6 5 23 12 21 5
用的。
例1: x (t) e a tu (t), a 0 h(t)u(t)
y(t) x(t) h(t) x( )h(t )
ea u( )u(t )d
t ea d 1 (1 eat )u(t)
0
a
u(t )
x ( )
1
1
0
0t
例2 :
x(t)10
0tT otherwise
x(k)
t
0
k (k1)
引用 (t,) 即:
(t) 1/0
0t otherwise
则有: (t) 1 0
0t otherwise
第 个k 矩形可表示为: x (k ) (t k )
这些矩形叠加起来就成为阶梯形信号 x ,( t )
即: x(t) x(k)(tk) k 当 0时, k d (t k ) (t ) x(t)x(t)
etut*ut 1ut 1
1[e(t1) 1]u(t 1) 1[e(t1) 1]u(t 1)
信号与系统
举例
❖ 已知某线性时不变系统的单位冲激响应和激
励信号分别为:e2tut ,ut1ut2,则系
利用z变换求解
❖ x1nnn1n2 x2nn1n2
X 1zX 2z1z 1z 2 z 1z 2
z 1z 2z 2z 3z 3z 4
张宇-信号与系统各章内容整理
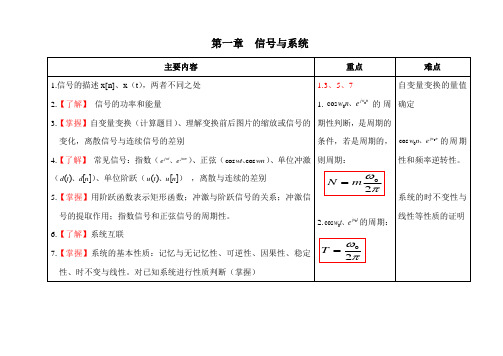
第一章 信号与系统主要内容重点难点1.信号的描述x[n]、x (t ),两者不同之处2.【了解】 信号的功率和能量3.【掌握】自变量变换(计算题目)、理解变换前后图片的缩放或信号的变化,离散信号与连续信号的差别4.【了解】 常见信号:指数(j t j n e e w w 、)、正弦(cos cos t n w w 、)、单位冲激(()[]t n d d 、)、单位阶跃(()[]u t u n 、) ,离散与连续的差别5.【掌握】用阶跃函数表示矩形函数;冲激与阶跃信号的关系;冲激信号的提取作用;指数信号和正弦信号的周期性。
6.【了解】系统互联7.【掌握】系统的基本性质:记忆与无记忆性、可逆性、因果性、稳定性、时不变与线性。
对已知系统进行性质判断(掌握)1.3、5、71.00cos j n n e w w 、的周期性判断,是周期的条件,若是周期的,则周期: 2.00cos j tt ew w 、的周期:自变量变换的量值确定0cos j nn e w w 、的周期性和频率逆转性。
系统的时不变性与线性等性质的证明2T ωπ=2N mωπ=第二章 线性时不变系统第三章 周期信号的傅里叶级数表示FS本章内容安排基本思路:主要内容难点 ✧ 系统的单位冲激响应容易求出:令()()x t t d =,对应的输出即为单位冲激响应() h t ;单位阶跃响应的求解和物理意义; ✧ 将任意信号分解为冲激信号()[]t n d d 、的线性组合[][][]; ()()()k x n x k n k x t x t d d t d t t ¥¥-?=-?=-=-åò✧ 利用LTI 系统的线性和时不变性,在单位冲激响应[]() h t h n 、已知的情况下,推导连续时间和离散时间系统对任意输入x 的响应:[][][]y n =x n * h n ; y(t)=x(t)* h(t)✧ 利用输入输出的卷积关系,根据单位冲激响应[]() h t h n 、,判断ITI 系统的性质✧ 了解线性常系数微分方程和差分方程的时域求解。
第2章__线性时不变系统
g (t ) u(t ) h(t ) h()d
求系统零状态响应举例:如图所示系统, hD (t ) (t 1 ) hG (t ) u(t ) u(t 3) , ,输入 x(t ) u(t ) u (t 1),求零状态响应y(t)
k
h[k ]x[n k ]
2、分配律
x[n] (h1[n] h2 [n]) x[n] h1[n] x[n] h2 [n]
x(t ) (h1 (t ) h2 (t )) x(t ) h1 (t ) x(t ) h2 (t )
物理意义: (1)LTI系统对两个输入的和的响应等于对 单个输入响应的和
y[n]
k
x[k ]h [n]
k
• 若该线性系统又是时不变的 ,则有
hk [n] h[n k ]
其中h[n]是系统输入为δ[n]时的零状态响应, 称为单位脉冲(样本)(序列)响应 y[n] x[k ]h[n k ] 所以对LTI系统,有 : k 对照卷积的定义,有: y[n] x[n] h[n] 称为卷积和
通信中的编码器都是可逆的 例: y(t ) 2 x(t ) w(t ) 1 y(t )
2
y[n]
k
x[k ]
n
w[n] y[n] y[n 1]
不可逆:
y[n] c
y(t ) x (t )
2
2.2.3 因果性
因果系统 :系统在任何时刻的输出只决定于现在 的输入以及过去的输入
y (t )
因此当 h(t ) dt 时,输出为有界-充分性 亦可证必要性 h(t ) dt 连续时间LTI系统的稳定性 离散时间LTI系统的稳定性 h[n]
信号与系统-第2章例题
对系统线性的进一步认识
例:已知一线性时不变系统,在相同初始条件下,当激励为 e(t ) 时,其全响应
为 r1 (t ) 2e
3t
sin(2t ) u (t ) ; 当 激 励 为 2e(t ) 时 , 其 全 响 应 为
3t r2 (t ) e 2sin(2t ) u (t ) 。求:
例:求微分方程的完全解 d2 d t y(0) y '(0) 0 y ( t ) 6 y ( t ) 5 y ( t ) e dt 2 dt d2 d 解: 齐次方程为 y (t ) 6 y (t ) 5 y (t ) 0 2 dt dt
特征方程:
2 6 5 0
d2 d r ( t ) 7 r (t ) 10r (t ) 2 (t ) 12 (t ) 8u(t ) 2 dt dt
例: 求系统的零输入响应
d2 d y ( t ) 3 y(t ) 2 y(t ) 0, y(0 ) 1, y '(0 ) 2 2 dt dt
1 5,2 1
特征根:
该方程的齐次解为:
yh (t ) C1e5t C2et
激励函数中a = -1,与微分方程的一个特征根相同,因此特解为:
y p (t ) C t et
例1 已知某二阶线性时不变连续时间系统的动态方程
y" (t ) 6 y' (t ) 8 y(t ) f (t ), t 0
零输入响应
例: 求系统的零输入响应 d2 d y (t ) 3 y(t ) 2 y(t ) 0, y(0 ) 1, y '(0 ) 2 2 dt dt 解:特征方程
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 t
2.4 LTI系统的性质
举例:累加系统(accumulator)
y[n]
k
x[k ]
n
它是LTI系统,其单位脉冲响应为
h[n] u[n]
h[n] k [n] Memory h[n] 0, n 0 Causal
2.4 LTI系统的性质
从以上推导得出以下结论: DT LTI 系统的单位阶跃响应是其单位脉冲响应的求和函数; DT LTI 系统的单位脉冲响应是其单位阶跃响应的一次差分 同理,对于CT LTI 系统: 单位阶跃响应是其单位冲激响应的积分函数
s(t ) h( )d
t
单位冲激响应是其单位阶跃响应的一阶导数
2.7小结
2.1概述
(1)线性与时不变性(Linearity and Time-Invariance): 很多物理过程都具有这两个性质 这些物理过程能用LTI系统表征 可以对LTI系统进行详细的分析:
能够将LTI系统的输入用一组基本信号的线性组合表示 根据该系统对基本信号的响应,利用叠加性质求得整个系统的输出
2.4 LTI系统的性质
离散时间LTI系统用 卷积和表示
连续时间LTI系统用 卷积积分表示
LTI系统的特性可以 完全由其单位冲激响 应决定
2.4 LTI系统的性质
卷积的交换律性质 The Commutative Property of Convolution
2.4 LTI系统的性质
卷积的三个代数性质:交换律、结合律、分配律 Three algebraic properties of convolution
2.2离散时间LTI系统:卷积和
LTI系统响应 的卷积和图示
2.2离散时间LTI系统:卷积和
例题:考虑一LTI系统,如图 所示,其单位脉冲响应为h[n], 输入为x[n],则输出
y[n] x[0]h[n 0] x[1]h[n 1]
0.5h[n] 2h[n 1]
2.2离散时间LTI系统:卷积和
ds (t ) h(t ) s(t ) dt
2.5用微分方程描述连续LTI系统
线性常系数微分方程
2.5用微分方程描述连续LTI系统
线性常系数微分方程的解
2.5用微分方程描述连续LTI系统
齐次解的形式
2.5用微分方程描述ຫໍສະໝຸດ 续LTI系统 线性常系数微分方程需要辅助条件
2.5用微分方程描述连续LTI系统
(2)单位冲激响应(Unit impulse response) 一般信号可表示为延迟冲激的线性组合 LTI系统的单位冲激响应能完全表征LTI系统的特性
2.1概述
(3)离散时间情况下的卷积和 (4)连续时间情况下的卷积积分 (5)分析其它LTI系统的性质 (6)线性常系数微分方程描述的连续时间系统 (7)线性常系数差分方程描述的离散时间系统
1 n1 y[n] ( )u[n] 1
2.3连续时间LTI系统:卷积积分
(1)用单位冲激表示连续时间信号
(1)Representation of CT Signals in Terms of Shifted unit Impulses 输入信号可以用一串延时脉冲的线性组合来表示
2.3连续时间LTI系统:卷积积分
2.4 LTI系统的性质
若k=1,这些系统就变成恒等(Identity)系统: 输出等于输入;单位冲激响应等于单位冲激 此时卷积和与卷积积分公式变成 x[n] x[n]* [n]
x(t ) x(t )* (t ) 上式其实就是DT和CT单位冲激函数的筛选性质
x[n] x(t )
2.6用差分方程描述离散LTI系统
齐次解的形式
2.6用差分方程描述离散LTI系统
线性常系数差分方程需要辅助条件
2.6用差分方程描述离散LTI系统
线性常系数差分方程的递归因果解
2.6用差分方程描述离散LTI系统
2.7小结
(1)DT:信号表示成一组移位的单位脉冲的加权和,由 此导出DT LTI系统响应的卷积和表示 (2)CT:信号表示成移位单位冲激函数的加权积分,由 此导出CT LTI系统响应的卷积积分表示 (3)单位冲激响应 (4)LTI系统的性质:因果性及稳定性 (5)LTI连续时间系统由线性常系数微分方程描述 (6)LTI离散时间系统由线性常系数差分方程描述
第2章 线性时不变系统 Chapter 2 Linear Time-Invariant Systems
第2章 线性时不变系统
2.1概述
2.2离散时间LTI系统:卷积和 2.3连续时间LTI系统:卷积积分
2.4LTI系统的性质
2.5用微分方程描述连续LTI系统
2.6用差分方程描述离散LTI系统
2.2离散时间LTI系统:卷积和
(1)用单位脉冲表示离散时间信号
(1)Representation of DT Signals in Terms of Shifted unit Samples 筛选性质 (sifting property)
2.2离散时间LTI系统:卷积和
2.2离散时间LTI系统:卷积和
n
h[n] NotStable
2.4 LTI系统的性质
LTI系统的单位阶跃响应 Unit Step Response 定义:单位阶跃响应s[n]或s(t)是当输入x[n] = u[n] 或 x(t) = u(t)时的系统输出响应 DT LTI系统,根据卷积和,其单位阶跃响应就是 单位阶跃序列与单位脉冲响应的卷积
k
h[k ]
2.4 LTI系统的性质
对连续时间系统,若|x(t)|<B,对全部t,与离散推导类似有
y (t )
h( ) x(t )d
h( ) x(t ) d
B h( ) d
若单位冲激响应是绝对可积的,即
x[n] B, 对所有的n
y[n]
y[n]
则按卷积和公式
y[n] B h[k ], 对所有n
k
h[k ] x[n k ]
k
k
h[k ]x[n k ]
如果单位脉冲响应是绝对可求和的,即 那么y[n]就是有界的,因此系统是稳定的
2.4 LTI系统的性质
交换律性质的解释: An interpretation of commutative property
2.4 LTI系统的性质
卷积的代数性质导致的一 个结果就是LTI系统能够 以任何次序串联
2.4 LTI系统的性质
卷积的分配律性质 导致的一个结果就 是LTI系统的并联能 够融合成一个LTI系 统
2.3连续时间LTI系统:卷积积分
卷积积分的图
解说明
2.3连续时间LTI系统:卷积积分
连续时间卷积积分的计算
2.3连续时间LTI系统:卷积积分
2.3连续时间LTI系统:卷积积分
举例:设某一LTI系统输入为 x(t),其单位冲激响应为h(t)
x(t ) e at u (t ), a 0 h(t ) u (t )
例题:
2.5用微分方程描述连续LTI系统
2.5用微分方程描述连续LTI系统
齐次解:自然响应(natural response) 特解:受迫响应(forced response)
2.6用差分方程描述离散LTI系统
线性常系数差分方程
2.6用差分方程描述离散LTI系统
N阶线性常系数差分方程的解
s[n] u[n]* h[n] 根据卷积的交换律 s[n] h[n]* u[n] 此时s[n]可看成输入是h[n], 单位脉冲响应为u[n]时的响应 u[n]是累加器的单位脉冲响应,因此有 s[n]
k
h[k ]
n
h[n]可以依据h[n] s[n] s[n 1]从s[n]中恢复出来
(2)离散时间LTI系统单位脉冲响应及卷积和表示 (2)The DT Unit Sample Response and the Convolution Sum Representation of LTI Systems
2.2离散时间LTI系统:卷积和
2.2离散时间LTI系统:卷积和
LTI系统响应的卷积和表示:
k
x[k ] [n k ]
x( ) (t )d
2.4 LTI系统的性质
LTI系统的可逆性 Invertibility
h(t )* h1 (t ) (t ) h[n]* h1[n] [n]
2.4 LTI系统的性质
LTI系统的稳定性(Stability) BIBO: Bounded Input Bounded Output 设一输入x[n] 是有界的,其界为B,即
作业
作业
作业
作业
卷积和计算的可视化
2.2离散时间LTI系统:卷积和
例题:已知输入x[n]和单位脉冲响应h[n]为
x[n] nu[n], 0 1 h[n] u[n]
由图可知, 对于n<0,x[k]和h[n-k]的非零部分 没有任何重合,所以对n<0而言, x[k] h[n-k]对全部k值都为零,故 n<0,y[n]=0 对于n 0, k , 0 k n x[k ]h[n k ] 0, 其余k值 因此,对于 n 0 , n 1 n1 k y[n] 1 k 0 因此对于全部n,就有
t 0, x( )与h(t - )的乘积为零, 所以y(t ) 0