系统辨识实验报告
系统辨识实验报告
i=1:800; figure(1) plot(i,Theta(1,:),i,Theta(2,:),i,Theta(3,:),i,Theta(4,:),i,Theta(5,:),i,T title('待估参数过渡过程') figure(2) plot(i,Pstore(1,:),i,Pstore(2,:),i,Pstore(3,:),i,Pstore(4,:),i,Pstore(5,: title('估计方差变化过程')
最小二乘法建模:
二、三次实验 本次实验要完成的内容: 1.参照index2,设计对象,从workspace空间获取数据,取二阶,三阶 对象实现最小二乘法的一次完成算法和最小二乘法的递推算法(LS and RLS); 2.对设计好的对象,在时间为200-300之间,设计一个阶跃扰动,用最 小二乘法和带遗忘因子的最小二乘法实现,对这两种算法的特点进行说 明; 实验内容结果与程序代码: 利用LS和RLS得到的二阶,三阶参数 算法 阶次 A1 A2 A3 B0 B1 B2 B3 LS 二阶 -0.78420.1373 -0.00360.5668 0.3157 RLS 二阶 -0.78240.1373 -0.00360.5668 0.3157 LS 三阶 -0.4381-0.12280.0407 -0.00780.5652 0.5106 0.1160
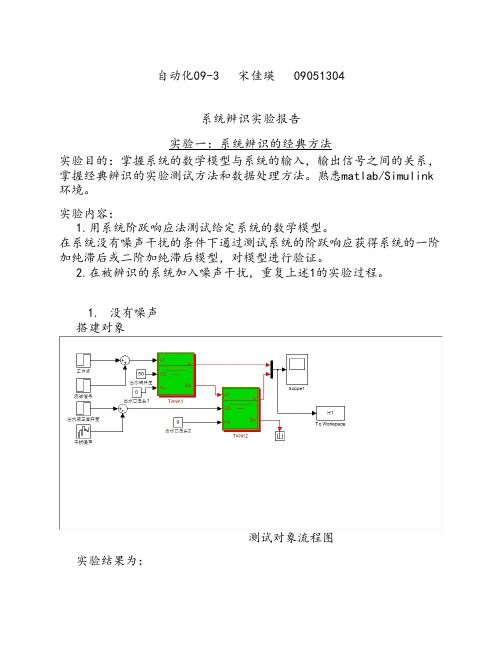
测试对象流程图 实验结果为:
2、加入噪声干扰 搭建对象
实验结果:
加入噪声干扰之后水箱输出不平稳,有波动。
实验二:相关分析法 搭建对象:
处理程序: for i=1:15 m(i,:)=UY(32-i:46-i,1);
end y=UY(31:45,2); gg=ones(15)+eye(15); g=1/(25*16*2)*gg*m*y; plot(g); hold on; stem(g); 实验结果: 相关分析法
系统辨识实验报告

系统辨识仿真实验根据系统已知的输入输出测量值(200个),进行最小二乘递推辨识(三阶)。
解:假设33221111)(----+++=z a z a z a z A221101)(---++=z b z b b z B 选择数据输入输出为:19510.26463 28.59951801 19621.976 34.33532814 19742.25396 35.76927848 20026.74433 38.3185258 19956.81167 40.23046349 19678.31876 44.21366407 19823.0536 45.32895813 19903.22043 47.08156767 20017.90925 47.08156767 20068.86682 47.71888023 20330.54353 56.00393622 20235.55444 61.73974343 20371.11527 61.42108715 20267.92301 63.49235151 20354.37094 63.65167965 20313.237 65.08563145 20378.58646 66.83823953 20430.65934 67.31622395 20354.91136 69.06883204 20596.50492 67.63488023 20584.24921 68.75017575 20539.29139 70.18412756 20413.59405 72.41472006 20461.48464 72.89270375 20588.68067 72.5740482 20429.32533 75.12329625 20491.1173 75.4419518 20616.40139 75.12329625 20486.99974 77.35388802 20451.52196 78.62851168 20510.68495 78.94716796 20489.94502 80.06246349 20516.16691 80.69977605 20605.64208 80.69977605 20567.65474 81.97440117 20544.64453 83.08969523 20488.93193 84.52364849 20543.67357 84.84230477 20534.4451 85.79827215 20476.70122 87.23222395 20545.34424 87.39155209 20550.1365 88.18819279 20522.46566 89.30348978 20525.82397 90.10013048 20783.50983 88.34752094 20516.72757 91.8527371 20502.24143 92.80870302 20582.6349 92.80870302 20503.70023 94.40198442 20551.03311 94.7206407 20518.46294 95.83593768 20532.85473 96.47325024 20514.9032 97.42921616 20480.30159 98.54451315 20508.59476 99.02249757 20663.99196 98.22585686 20533.19627 100.2971198 20464.57811 101.731073 20490.48136 102.2090574 20516.02613 102.6870419 20493.41425 103.6430078 20438.21948 104.9176329 20493.59845 105.0769611 20453.26103 106.192258 20475.81868 106.6702395 20450.21912 107.6262084 20423.90258 108.5821772 20412.80188 109.3788179 20401.10398 110.1754557 20404.74114 110.8127683 20391.96749 111.609409 20378.59636 112.406049720380.56057 113.0433622 20397.9799 113.5213437 20351.30919 114.6366407 20399.3989 114.7959688 20351.77222 115.9112658 20351.1081 116.5485725 20349.96542 117.1858851 20332.41135 117.9825316 20330.19319 118.6198442 20295.63143 119.575813 20308.15171 120.0537916 20288.4473 120.8504323 20300.01103 121.3284167 20263.41783 122.2843856 20273.9061 122.76237 20268.10307 123.3996826 20245.88924 124.1963233 20239.01074 124.8336358 20215.72202 125.6302707 20207.76807 126.2675833 20151.53768 127.3828802 20174.13489 127.7015365 20180.5603 128.1795209 20170.6944 128.8168335 20144.4177 129.6134742 20133.47634 130.2507868 20153.92262 130.569443 20110.39866 131.5254119 20129.88956 131.8440623 20117.27525 132.4813749 20072.31734 133.4373437 20074.44089 133.9153281 20028.40751 134.871297 20013.52278 135.5086095 19998.16007 136.1459221 19998.25218 136.6239065 19982.053 137.2612191 19965.37583 137.8985316 19996.01911 138.0578598 19946.87942 139.0138228 19928.88779 139.6511353 19910.41819 140.2884479 19891.4706 140.9257605 19872.04502 141.563073 19852.14146 142.2003856 19831.75991 142.8376982 19826.8332 143.3156826 19805.61518 143.9529951 19783.91918 144.5903077 19761.74519 145.2276203 19739.0938 145.864927 19731.89667 146.3429114 19708.40823 146.980224 19700.37462 147.4582084 19691.98252 147.9361928 19667.29912 148.5735054 19642.13773 149.2108179 19616.49836 149.8481305 19606.31382 150.3261149 19595.77079 150.8040993 19568.93646 151.4414119 19541.62415 152.0787244 19513.83443 152.7160312 19517.43178 153.0346874 19488.92451 153.672 19444.00644 154.4686407 19414.4237 155.1059533 19400.2958 155.5839377 19401.74221 155.902594 19387.01683 156.3805784 19340.06732 157.1772191 19340.31878 157.4958754 19308.46562 158.1331879 19276.13447 158.7705005 19259.25874 159.2484791 19242.02394 159.7264635 19224.43065 160.2044479 19222.41168 160.5231042 19188.2881 161.1604167 19169.61934 161.6384012 19166.52492 161.9570574 19131.32528 162.5943759 19111.58164 163.0723544 19107.41175 163.3910107 19071.13723 164.0283233 19066.25036 164.3469796 19045.19227 164.8249581 19007.8423 165.4622707 19001.87997 165.780927 18979.74524 166.2589172 18973.1866 166.5775618 18934.52217 167.214874418911.31199 167.6928647 18887.74331 168.1708549 18879.75071 168.4894995 18855.58456 168.9674898 18862.92671 169.1268121 18838.28258 169.6048023 18813.27995 170.0827926 18787.92 170.5607712 18762.20156 171.0387498 18736.12347 171.51674 18725.62029 171.8353963 18698.94588 172.3133749 18687.84523 172.6320312 18660.57218 173.1100214 18648.87403 173.4286777 18621.00467 173.9066563 18608.70905 174.2253126 18580.24103 174.7033028 18551.4157 175.1812814 18554.09634 175.3406154 18540.72525 175.6592717 18511.18294 176.1372502 18497.21437 176.4559065 18467.07459 176.9338851 18436.57515 177.4118754 18437.58401 177.5711977 18422.53998 177.8898539 18407.25696 178.2085102 18375.80156 178.6865005 18343.98882 179.1644791 18343.68206 179.323813 18327.32358 179.6424693 18294.79387 180.1204479 18293.77013 180.2797819 18260.76244 180.7577605 18259.26072 180.9170945保存为shuju.txt 文件。
系统辨识实验1实验报告
实验报告--实验1.基于matlab的4阶系统辨识实验课程:系统辨识题目:基于matlab的4阶系统辨识实验作者:专业:自动化学号:11351014目录实验报告 (1)1.引言 (2)2.实验方法和步骤 (2)3.实验数据和结果 (2)4.实验分析 (4)1、 引言系统辨识是研究如何确定系统的数学模型及其参数的理论。
而模型化是进行系统分析、仿真、设计、预测、控制和决策的前提和基础。
本次实验利用matlab 工具对一个简单的4阶系统进行辨识,以此熟悉系统辨识的基本步骤,和matlab 里的一些系统辨识常用工具箱和函数。
这次实验所采取的基本方法是对系统输入两个特定的激励信号,分别反映系统的动态特性和稳态特性。
通过对输入和输出两个系统信号的比较,来验证系统的正确性。
2、 实验方法和步骤2.1 实验方法利用matlab 对一个系统进行辨识,选取的输入信号必须能够反映系统的动态和稳态两个方面的特性,才能更好地确定系统的参数。
本次实验采取了两种输入信号,为反映动态特性,第一个选的是正弦扫频信号,由下面公式产生:选定频率范围 ,w(t)是时间t 的线性函数,具有扫频性质,可以反映系统的动态特性。
为反映稳态特性,选的输入信号是阶跃信号。
以上的到两组数据,利用matlab 的merge()函数,对两组数据融合,然后用matlab 系统辨识工具箱中的基于子空间方法的状态空间模型辨识函数n4sid()来对系统进行辨识2.2 实验步骤(1)建立一个4阶的线性系统,作为被辨识的系统,传递函数为3243211548765()125410865s s s G s s s s s -+-+=++++(2)产生扫频信号u1和阶跃信号u2(3)u1、u2作为输入对系统进行激励,分别产生输出y1和y2 (4)画出稳态测试输入信号u1-t 的曲线,和y1-t 的曲线 画出动态测试输入信号u2-t 的曲线,和y2-t 的曲线(5)使用merge()函数对u1-y1数据和u2-y2数据进行融合,并使用n4sid()函数对系统进行辨识。
系统辨识实验报告
系统的数学建模与辨识实验报告编号:8姓名:学号: 1电加热炉动态特性辨识实验报告一.实验目的通过实验了解辨识方法在工程应用中的一些实际问题;了解数据获取和数据处理的各种方法和手段,掌握各种辨识方法的应用特点。
二.实验内容1.数据获取按照电加热计算机控制系统使用说明,加热温箱并实时监测温度。
当温度升高到一定高度基本不再发生变化时,加入辨识信号。
本设计辨识信号采用伪随机二维序列中的M序列,由于设计的M序列过长,从中截取部分作为辨识信号。
设定辨识信号的采样周期和整个辨识信号循环次数,加入辨识信号记录温度随电压变化的数据结果。
2.数据处理观察实验数据,可发现扰动较严重,需要对数据进行预处理以便进行后续辨识。
对采集数据进行滤波等处理,实验输入为M序列长度为30,由于实际采集周期为2秒,所得数据远大于需要用到的数据,同时为了提高精度,减少扰动因素影响,数据处理过程中,当输入一个M序列元素后,采集到的数据中取最后5个数据求其平均作为该输入的输出结果。
数据处理最终结果为30组输入和输出,将其生成为.mat文件以供后续离线辨识使用。
3.离线辨识利用处理过的数据选择某种辨识方法进行参数估计,并判断阶次及迟滞。
辨识完成后,进行模型验证。
三.实验操作1.设定相关实验参数,启动试验设备。
本实验设置的加热电压为60V,温度采样间隔为2s,开始实验,加热温箱系统,并通过客户端软件实时观察温箱温度,并记录,等待温箱温度升高到一定高度不再有明显上升变化。
2. 设计辨识信号考虑到实验加热电压为60V,整个系统的加热电压为之前设置的系统加热电压与辨识信号电压的和,为了在较短时间内也能产生一定的变化,辨识电压值不宜过小,选取辨识信号电压为10V 。
此时,加入辨识信号后的整个系统电压在50V 和70V 来回跳动。
辨识序列采用M 序列,并使用庞中华系统辨识程序中的M 序列生成程序,序列长度设置为31,结果如下图所示:3. 当第一步的温箱电压升高到一定高度,不再有明显升上变化时,便可认为系统已经稳定。
系统辨识实验报告30288
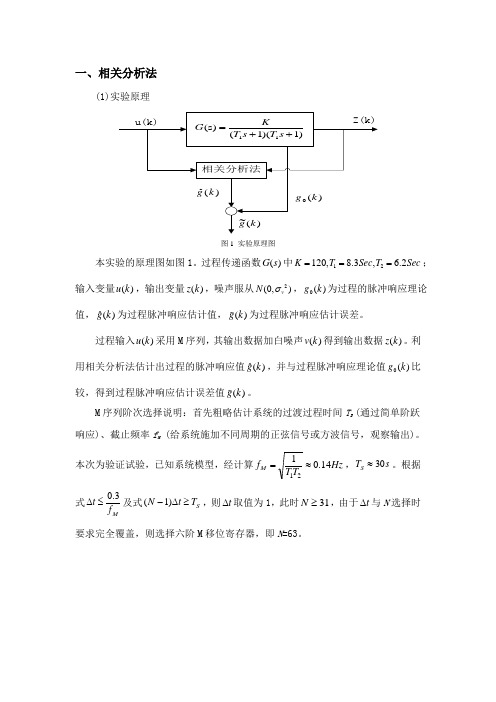
一、相关分析法(1)实验原理图1 实验原理图本实验的原理图如图1。
过程传递函数()G s 中12120,8.3, 6.2K T Sec T Sec ===;输入变量()u k ,输出变量()z k ,噪声服从2(0,)v N σ,0()g k 为过程的脉冲响应理论值,ˆ()gk 为过程脉冲响应估计值,()g k 为过程脉冲响应估计误差。
过程输入()u k 采用M 序列,其输出数据加白噪声()v k 得到输出数据()z k 。
利用相关分析法估计出过程的脉冲响应值ˆ()gk ,并与过程脉冲响应理论值0()g k 比较,得到过程脉冲响应估计误差值()g k 。
M 序列阶次选择说明:首先粗略估计系统的过渡过程时间T S (通过简单阶跃响应)、截止频率f M (给系统施加不同周期的正弦信号或方波信号,观察输出)。
本次为验证试验,已知系统模型,经计算Hz T T f M 14.0121≈=,s T S 30≈。
根据式Mf t 3.0≤∆及式S T t N ≥∆-)1(,则t ∆取值为1,此时31≥N ,由于t ∆与N 选择时要求完全覆盖,则选择六阶M 移位寄存器,即N =63。
(2)编程说明图2 程序流程图(3)分步说明 ① 生成M 序列:M 序列的循环周期63126=-=N ,时钟节拍1t Sec ∆=,幅度1a =,移位寄存器中第5、6位的内容按“模二相加”,反馈到第一位作为输入。
其中初始数据设为{1,0,1,0,0,0}。
程序如下:② 生成白噪声序列: 程序如下:③ 过程仿真得到输出数据:如图2所示的过程传递函数串联,可以写成形如121211()1/1/K Gs TT s T s T =++,其中112KK TT =。
图2 过程仿真方框图程序如下:④ 计算脉冲响应估计值:互相关函数采用公式)()(1)(10k i y i x Nr k R N r i xy +⋅⋅=∑-⋅=,互相关函数所用的数据是从第二个周期开始的,其中r 为周期数,取1-3之间。
系统辨识与自适应控制实验报告
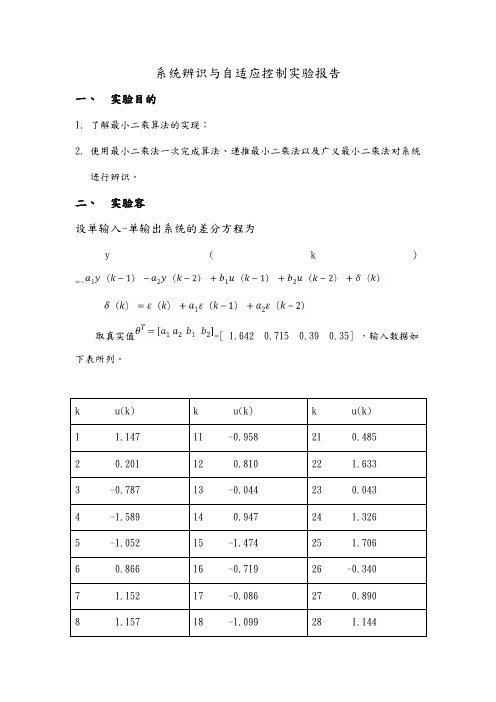
系统辨识与自适应控制实验报告一、实验目的1.了解最小二乘算法的实现;2.使用最小二乘法一次完成算法、递推最小二乘法以及广义最小二乘法对系统进行辨识。
二、实验容设单输入-单输出系统的差分方程为y(k)=-取真实值=[ 1.642 0.715 0.39 0.35] ,输入数据如下表所列。
k u(k) k u(k) k u(k)1 1.147 11 -0.958 21 0.4852 0.201 12 0.810 22 1.6333 -0.787 13 -0.044 23 0.0434 -1.589 14 0.947 24 1.3265 -1.052 15 -1.474 25 1.7066 0.866 16 -0.719 26 -0.3407 1.152 17 -0.086 27 0.8908 1.157 18 -1.099 28 1.1449 0.626 19 1.450 29 1.177 10 0.43320 1.15130 -0.390用的真实值利用查分方程求出作为测量值,为均值为0,方差为0.1,0.5的不相关随机序列。
(1) 用最小二乘法估计参数(2) 用递推最小二乘法估计参数θ。
(3) 用辅助变量法估计参数θ。
(4) 设,用广义最小二乘法估计参数θ。
(5) 用增广矩阵法估计参数θ详细分析和比较所获得的参数辨识结果,并说明上述参数辨识方法的优点。
三、 实验设备Matlab 软件,PC 机一台。
四、实验原理4.1 最小二乘一次完成算法 4.1.1 公式 辨识参数L T LL TL LS y XX X 1)(-Λ=θ上式中4.1.2 程序流程图图 1最小二乘一次完成程序流程图4.2 递推最小二乘算法4.2.1 递推公式公式为其中,4.2.2 算法流程图图 2 递推最小二乘法实现程序框图4.3 增广最小二乘递推算法4.3.1 递推公式公式为:其中,4.3.2 算法流程图图 3 增广最小二乘法算法流程图五、实验结果5.1 最小二乘法一次完成实验结果XL =0 0 0 00 0 0 00 0 0.2010 1.1470-0.4798 0 -0.7870 0.20101.0245 -0.4798 -1.5890 -0.7870-0.4439 1.0245 -1.0520 -1.5890 0.9629 -0.4439 0.8660 -1.0520 -1.2332 0.9629 1.1520 0.8660 0.5840 -1.2332 1.5730 1.1520 -1.0939 0.5840 0.6260 1.5730 0.5840 -1.0939 0.4330 0.6260 -0.5647 0.5840 -0.9580 0.4330 0.7317 -0.5647 0.8100 -0.9580 -0.7784 0.7317 -0.0440 0.8100 0.4885 -0.7784 0.9470 -0.0440 -0.5996 0.4885 -1.4740 0.9470 0.8786 -0.5996 -0.7190 -1.4740 -0.2177 0.8786 -0.0860 -0.7190 0.0144 -0.2177 -1.0990 -0.0860 0.5907 0.0144 1.4500 -1.0990 -1.1611 0.5907 1.1510 1.4500 0.5277 -1.1611 0.4850 1.1510 -0.6284 0.5277 1.6330 0.4850 -0.1521 -0.6284 0.0430 1.6330 0.1108 -0.1521 1.3260 0.0430 -0.6053 0.1108 1.7060 1.3260 -0.2147 -0.6053 -0.3400 1.70600.3208 -0.2147 0.8900 -0.3400 -0.6014 0.3208 1.1440 0.8900 0.0005 -0.6014 1.1770 1.1440 yL =0.4798-1.02450.4439-0.96291.2332-0.58401.0939-0.58400.5647-0.73170.7784-0.48850.5996-0.87860.2177-0.0144-0.59071.1611-0.52770.62840.1521-0.11080.60530.2147-0.32080.6014-0.00050.4302辨识参数矩阵c =1.64200.71500.39000.3500a1 =1.6420;a2 =0.7150;b1 =0.3900;b2 =0.3500 下图为输入、输出矩阵的根径图图 4最小二乘法一次实现输入输出根径图5.2 递推最小二乘法算法辨识结果系统输出矩阵:y =Columns 1 through 130 0 0.4798 -1.0245 0.4439 -0.9629 1.2332 -0.5840 1.0939 -0.5840 0.5647 -0.7317 0.7784Columns 14 through 26-0.4885 0.5996 -0.8786 0.2177 -0.0144 -0.5907 1.1611 -0.5277 0.6284 0.1521 -0.1108 0.6053 0.2147Columns 27 through 30-0.3208 0.6014 -0.0005 0.4302辨识参数矩阵(辨识过程执行26次即满足了误差要求):c =Columns 1 through 130.0010 0 0.0010 0.5690 1.3863 1.64201.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.64200.0010 0 0.0010 0.0010 -0.2821 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.71500.0010 0 0.0719 1.0162 0.5392 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.39000.0010 0 0.4057 0.2403 0.3239 0.3500 0.3500 0.3500 0.3500 0.3500 0.3500 0.3500 0.3500Columns 14 through 261.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.64200.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.71500.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.39000.3500 0.3500 0.3500 0.3500 0.3500 0.3500 0.3500 0.3500 0.3500 0.3500 0.3500 0.3500 0.3500辨识误差矩阵:e =Columns 1 through 130 0 0 567.9876 1.4365 0.1844 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.00000 0 0 0 -283.1457 -3.5341 -0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.00000 0 70.9263 13.1283 -0.4694 -0.2767 0.0000 0.0000 -0.0000 -0.0000 0.0000 -0.0000 -0.00000 0 404.7388 -0.4078 0.3479 0.0807 -0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000Columns 14 through 260.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 -0.0000 -0.0000 0.0000 0.0000 0.00000.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 -0.00000.0000 -0.0000 -0.0000 0.0000 0.0000 0.0000 0.0000 -0.0000 0.0000 0.0000 0.0000 0.0000 -0.00000.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 -0.0000 -0.0000 -0.0000 -0.0000 -0.0000输入输出根径图图 5 递推最小二乘法输入输出根径图辨识参数过程图 6 递推最小二乘法辨识参数(辨识过程)辨识误差:图 7 递推最小二乘法辨识过程中的误差曲线5.3 增光最小二乘法实验结果随机噪声e0 =Columns 1 through 130.8017 0.3112 0.0400 1.5927 2.1796 -0.2063 0.4197 -0.4914 0.9967 -2.0484 1.3063 0.5351 0.5779Columns 14 through 261.5297 0.0416 0.1831 -0.9543 -1.3474 -0.3873 0.5971 -0.2250 -1.0173 1.3889 -0.3959 0.3049 0.3154Columns 27 through 300.0668 0.7128 0.0522 -1.3478考虑噪声的系统输出矩阵y =Columns 1 through 130 0 1.3292 -2.8976 3.0444 -3.4535 4.0637 -1.2169 1.8419 -1.5061 0.3942 -3.0734 2.3278Columns 14 through 26-0.7705 1.1973 -0.1962 0.3711 -0.4941 -1.4314 1.2987 -1.5689 0.0303 1.8310 0.3403 -0.3472 0.5176Columns 27 through 30-1.1419 -0.4368 0.0696 1.6791不考虑噪声的系统输出矩阵ys =Columns 1 through 130 0 0.4798 -2.4191 2.9124 -3.8936 3.4635 -3.4509 0.1092 -1.3596 1.5440 0.2076 4.7453Columns 14 through 26-1.3584 -0.0452 -1.6585 -1.3303 -0.7543 0.0873 2.8846 -0.1526 2.2396 1.8786 -2.4398 -1.3358 1.4562Columns 27 through 30-0.1371 1.7331 2.2914 1.0575不考虑噪声时的模型输出ym =Columns 1 through 130 0 0.8502 -2.7124 3.2115 -4.4770 4.5771 -3.4086 0.1092 -1.3596 1.5440 0.2076 4.7453Columns 14 through 26-1.3584 -0.0452 -1.6585 -1.3303 -0.7543 0.0873 2.8846 -0.1526 2.2396 1.8786 -2.4398 -1.3358 1.4562Columns 27 through 30-0.1371 1.7331 2.2914 1.0575考虑噪声时的模型输出ymd =Columns 1 through 130 0 1.3292 -2.8976 3.0444 -3.4535 4.0637 -1.2169 1.8419 -1.5061 0.3942 -3.0734 2.3278Columns 14 through 26-0.7705 1.1973 -0.1962 0.3711 -0.4941 -1.4314 1.2987 -1.5689 0.0303 1.8310 0.3403 -0.3472 0.5176Columns 27 through 30-1.1419 -0.4368 0.0696 1.6791辨识参数矩阵:c =Columns 1 through 130.0010 0 0.0010 1.5171 1.6829 1.84351.8250 1.6529 1.6420 1.6420 1.6420 1.6420 1.64200.0010 0 0.0010 0.0010 -0.1409 0.7419 0.6281 0.7388 0.7150 0.7150 0.7150 0.7150 0.71500.0010 0 0.1268 1.0576 0.8180 0.3002 0.4168 0.3921 0.3900 0.3900 0.3900 0.3900 0.39000.0010 0 0.7190 0.6789 0.7019 0.4396 0.1656 0.3522 0.3500 0.3500 0.3500 0.3500 0.35000.0010 0 -0.1988 0.0261 0.0572 -0.0988 -0.0852 1.0030 1.0000 1.0000 1.0000 1.0000 1.00000.0010 0 0.2540 0.6848 0.6545 1.34961.4284 1.6100 1.6420 1.6420 1.6420 1.6420 1.64200.0010 0 0.4430 0.0984 0.1605 0.2657 0.6386 0.7305 0.7150 0.7150 0.7150 0.7150 0.7150Columns 14 through 261.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.64200.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.71500.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.39000.3500 0.3500 0.3500 0.3500 0.3500 0.35000.3500 0.3500 0.3500 0.3500 0.3500 0.3500 0.35001.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.00001.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.64200.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150Columns 27 through 301.6420 1.6420 1.6420 1.64200.7150 0.7150 0.7150 0.71500.3900 0.3900 0.3900 0.39000.3500 0.3500 0.3500 0.35001.0000 1.0000 1.0000 1.00001.6420 1.6420 1.6420 1.64200.7150 0.7150 0.7150 0.7150辨识参数误差矩阵e =1.0e+003 *Columns 1 through 130 0 0 1.5161 0.0001 0.0001 -0.0000 -0.0001 -0.0000 -0.0000 -0.0000 -0.0000 -0.00000 0 0 0 -0.1419 -0.0063 -0.0002 0.0002 -0.0000 0.0000 0.0000 -0.0000 -0.00000 0 0.1258 0.0073 -0.0002 -0.0006 0.0004 -0.0001 -0.0000 -0.0000 -0.0000 -0.0000 -0.00000 0 0.7180 -0.0001 0.0000 -0.0004 -0.0006 0.0011 -0.0000 0.0000 -0.0000 -0.0000 0.00000 0 -0.1998 -0.0011 0.0012 -0.0027 -0.0001 -0.0128 -0.0000 0.0000 0.0000 0.0000 -0.00000 0 0.2530 0.0017 -0.0000 0.0011 0.0001 0.0001 0.0000 -0.0000 0.0000 0.0000 0.00000 0 0.4420 -0.0008 0.0006 0.0007 0.0014 0.0001 -0.0000 0.0000 0.0000 -0.0000 0.0000Columns 14 through 260.0000 0.0000 0.0000 -0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 -0.0000 0.0000 0.0000 0.00000.0000 0.0000 0.0000 -0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 -0.0000-0.0000 -0.0000 0.0000 -0.0000 0.0000 0.0000 0.0000 -0.0000 0.0000 0.0000 0.0000 0.0000 -0.00000.0000 0.0000 -0.0000 -0.0000 -0.0000 -0.0000 -0.0000 -0.0000 -0.0000 0.0000 -0.0000 -0.0000 -0.0000-0.0000 -0.0000 -0.0000 0.0000 -0.0000 0.0000 -0.0000 0.0000 0.0000 0.0000 -0.0000 -0.0000 -0.00000.0000 0.0000 0.0000 0.0000 0.0000 0.00000.0000 0.0000 0.0000 -0.0000 -0.0000 0.0000 0.0000-0.0000 -0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 -0.0000 0.0000 0.0000 -0.0000Columns 27 through 300.0000 -0.0000 -0.0000 0.00000.0000 -0.0000 -0.0000 0.00000.0000 -0.0000 -0.0000 -0.0000-0.0000 0.0000 -0.0000 -0.00000.0000 0.0000 0.0000 -0.00000.0000 0.0000 0.0000 0.00000.0000 -0.0000 0.0000 0.0000输入输出根径图:图 8 增广最小二乘法输入输出根径图辨识过程的参数:图 9 增广最小二乘法辨识过程参数辨识过程中的误差图 10 增广最小二乘法辨识过程中的误差系统输出矩阵和模型输出矩阵的对比:图 11 系统输出矩阵和模型输出矩阵的对比图六、结果分析利用最小二乘法对系统进行辨识,能够在最小误差平方的意义上对实验数据实现最好的拟合。
系统辨识实验报告xjtu
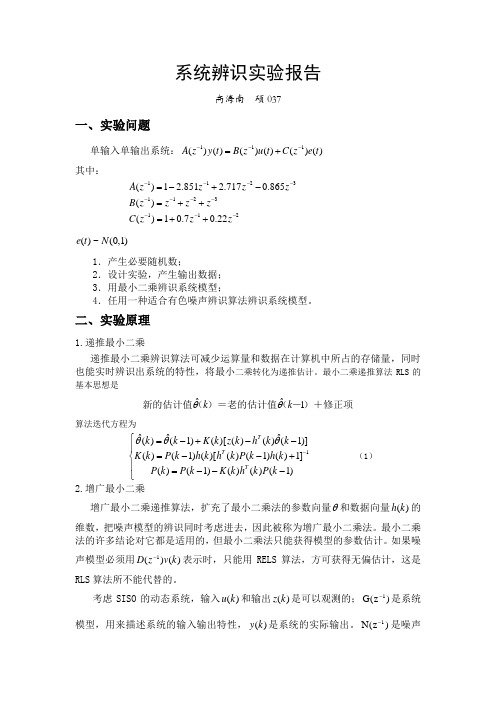
系统辨识实验报告高海南 硕037一、实验问题单输入单输出系统:111()()()()()()A z y t B z u t C z e t ---=+其中:11231123112()1 2.851 2.7170.865()()10.70.22A z z z z B z z z z C z z z -----------=-+-=++=++()~(0,1)e t N1.产生必要随机数;2.设计实验,产生输出数据;3.用最小二乘辨识系统模型;4.任用一种适合有色噪声辨识算法辨识系统模型。
二、实验原理1.递推最小二乘递推最小二乘辨识算法可减少运算量和数据在计算机中所占的存储量,同时也能实时辨识出系统的特性,将最小二乘转化为递推估计。
最小二乘递推算法RLS 的基本思想是ˆˆ1k k θθ新的估计值()=老的估计值(-)+修正项算法迭代方程为1ˆˆˆ()(1)()[()()(1)]()(1)()[()(1)()1]()(1)()()(1)T T T k k K k z k h k k K k P k h k h k P k h k P k P k K k h k P k θθθ-⎧=-+--⎪=--+⎨⎪=---⎩(1)2.增广最小二乘增广最小二乘递推算法,扩充了最小二乘法的参数向量θ和数据向量)(k h 的维数,把噪声模型的辨识同时考虑进去,因此被称为增广最小二乘法。
最小二乘法的许多结论对它都是适用的,但最小二乘法只能获得模型的参数估计。
如果噪声模型必须用)()(1k v z D -表示时,只能用RELS 算法,方可获得无偏估计,这是RLS 算法所不能代替的。
考虑SISO 的动态系统,输入)(k u 和输出)(k z 是可以观测的;)z (G 1-是系统模型,用来描述系统的输入输出特性,)(k y 是系统的实际输出。
)z (N 1-是噪声模型,)(k v 是均值为零的不相关随机噪声。
通常 )z (A )z (B )z (G 1-11--=,)z (C )z (D )z (N 111---= (2)式中⎪⎩⎪⎨⎧++++=++++=⎪⎩⎪⎨⎧+++=++++=---------------d d c c b b a a n n 22111n n 22111n n 22111-n n 22111z z z 1)z (z z z 1)z (z z z )z (z z z 1)z (d d d D c c c C b b b B a a a A (3)若SISO 系统采用平均滑动模型,即 )z (A )z (C -1-1= (4))()(D )()z (B )(z )z (A 111k v z k u k ---+=若假定模型阶次a n 、b n 、d n 已经确定,则这类问题的辨识可用增广最小二乘法,以便获得满意的结果。
系统辨识实验报告1
14
四.实验运行结果:
函数界面示意图: 6. 只显示结果界面: 7. 显示过程的参考界面:
15
心得体会
我很喜欢这个课程的期末考核方式,不用再拘泥于在题目当中对该课程的了 解,而是通过 4 个 C 语言设计的练习来达到学习的目的,而且对以后的学习还有 很大的帮助。
在编写 C 语言的过程中,也遇到了一些阻碍,特别是在编写第 3,4 个的时候。 比如:用的数组太多,并且未将其初始化,运行出来的结果经常是很长的一段随 机数;或者一模一样的程序有时候就可以正常运行,有时候就总是出现报错…… 这些都是让我心塞了两周的问题。在这些问题解决之后,运行出来的结果却与实 际模型参数的出入有点大,于是又重新查找第 2 个实验是否是 M 序列产生的方式 有问题。通过对初始化寄存器赋给不同的值,可以让结果与真实模型参数之间的 误差达到最小。
实验 4 ................................................ 错误!未定义书签。 一.实验内容及要求: ............................... 错误!未定义书签。 二.实验原理: ..................................... 错误!未定义书签。 三.数据递推关系图: ............................... 错误!未定义书签。
编写并调试动态离散时间模型 LS 成批算法程序。 要求:(1)原始数据由 DU 和 DY 读出。 (2)调用求逆及相乘子程序。 (3)显示参数辨识结果。
二.实验原理:
1.批次处理的方法就是把所有的数据采集到一次性进行处理,但前提是 白色噪声、及 M 序列所共同作用而产生的输出,才能使用最小二乘法。虽然 这种方法的计算量庞大,但经常用于处理时不变系统,方法简单。
系统认识实验实验报告

一、实验目的通过本次实验,加深对系统认识的理解,掌握系统分析方法,提高系统思维和问题解决能力。
二、实验内容1. 系统定义系统是由相互联系、相互作用的要素组成的具有一定结构和功能的有机整体。
系统具有以下特征:(1)整体性:系统是一个有机整体,各要素之间相互联系、相互制约。
(2)目的性:系统具有明确的目标,各要素为达成目标而协同工作。
(3)层次性:系统具有不同的层次,各层次之间相互依存、相互影响。
(4)动态性:系统处于不断发展变化之中,各要素之间的关系也随之变化。
2. 系统分析方法(1)系统分析的基本方法系统分析的基本方法包括:①结构分析法:分析系统的组成要素、要素之间的关系以及系统的层次结构。
②功能分析法:分析系统的功能、功能之间的关系以及功能与要素之间的关系。
③行为分析法:分析系统的行为特征、行为变化规律以及行为与要素之间的关系。
④层次分析法:分析系统各层次之间的相互关系,以及各层次在系统中的作用。
(2)系统分析的具体步骤①明确系统目标:确定系统要解决的问题和要达到的目标。
②收集系统信息:收集与系统相关的各种信息,包括数据、资料、文献等。
③建立系统模型:根据系统目标和信息,建立系统的数学模型或概念模型。
④分析系统模型:对系统模型进行定性和定量分析,找出系统存在的问题和改进措施。
⑤优化系统方案:根据分析结果,提出优化系统方案的措施和建议。
⑥实施与评估:将优化方案付诸实践,并对实施效果进行评估。
三、实验过程1. 确定实验对象:以某企业生产系统为研究对象。
2. 收集系统信息:通过查阅文献、访谈相关人员等方式,收集企业生产系统的相关信息。
3. 建立系统模型:根据收集到的信息,建立企业生产系统的数学模型。
4. 分析系统模型:运用结构分析法、功能分析法等方法,对系统模型进行定性和定量分析。
5. 优化系统方案:针对系统存在的问题,提出优化生产系统的措施和建议。
6. 实施与评估:将优化方案付诸实践,并对实施效果进行评估。
系统辨识报告
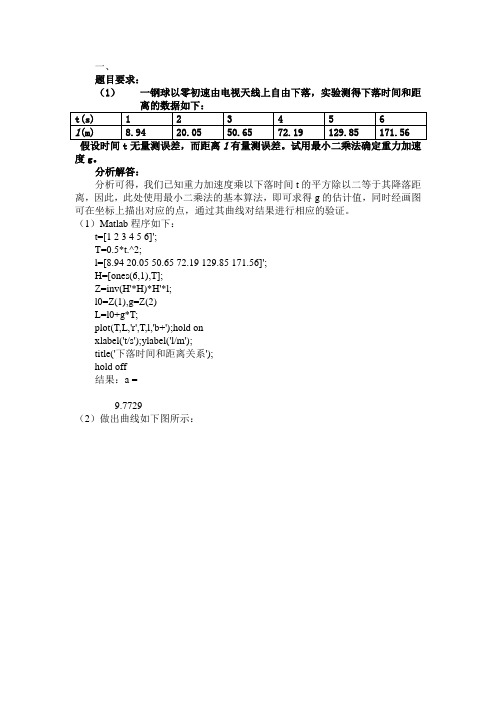
一、题目要求:(1)一钢球以零初速由电视天线上自由下落,实验测得下落时间和距度g。
分析解答:分析可得,我们已知重力加速度乘以下落时间t的平方除以二等于其降落距离,因此,此处使用最小二乘法的基本算法,即可求得g的估计值,同时经画图可在坐标上描出对应的点,通过其曲线对结果进行相应的验证。
(1)Matlab程序如下:t=[1 2 3 4 5 6]';T=0.5*t.^2;l=[8.94 20.05 50.65 72.19 129.85 171.56]';H=[ones(6,1),T];Z=inv(H'*H)*H'*l;l0=Z(1),g=Z(2)L=l0+g*T;plot(T,L,'r',T,l,'b+');hold onxlabel('t/s');ylabel('l/m');title('下落时间和距离关系');hold off结果:a =9.7729(2)做出曲线如下图所示:图一:小球下落时间与距离关系曲线图(2)题目要求:设两国军备竞赛模型为x(k)=ax(k-1)+by(k-1)+fy(k)=cx(k-1)+dy(k-1)+g式中x(k)和y(k)为两国军事费用(单位:百万美元),已知数据如下:试用最小二乘法确定模型参数a,b,c,d,f和g.分析解答:仍然可直接使用最小二乘法进行估计计算.1.伊朗和伊拉克:Matlab程序如下:y=[909 1123 2210 2247 2204 2303 2179 2675 ];x=[2891 3982 8801 11230 12178 9867 9165 5080 ];for k=2:8h(k,:)=[x(k-1) y(k-1) 1];z(k,:)=[x(k) y(k)];endguji=inv(h'*h)*h'*z; %算出a、b、f、c、d、g估计值,为三行两列的矩阵a=guji(1,1),b=guji(2,1),f=g uji(3,1),c=guji(1,2),d=guji(2,2),g=guji(3,2)%分别取到a、b、f、c、d、gplot([1:8],x,'r');hold on%画出实际与各自的估计曲线hg=h*guji;abf=(hg(:,[1]))';plot([1:8],abf,'b');hold onplot([1:8],y,'r');hold on hg=h*guji;cdg=(hg(:,[2]))';plot([1:8],cdg,'g');hold on xlabel('k(1-8代表1972到1980)'); ylabel('军事费用/百万美元');%写出坐标表头legend('伊朗实际值','伊朗估计值','伊拉克实际值','伊拉克估计值');title('伊朗与伊拉克军事费用对比'); hold offa =0.5481b =-0.2034f =4.4475e+003c =-0.0306d =0.7443g =987.1565:图二:伊朗与伊拉克军事费用比较图2、北约和华约:Matlab程序如下:x=[216478 211146 212267 210525 205717 212009 215988 218561 255411 233957 ];y=[112893 115020 117169 119612 121461 123561 125498 127185 129000 131595];for k=2:10h(k,:)=[x(k-1) y(k-1) 1];z(k,:)=[x(k) y(k)];endguji=inv(h'*h)*h'*z;%用最小二乘法求出估计值a=guji(1,1),b=guji(2,1),f=guji(3,1),c=guj i(1,2),d=guji(2,2),g=guji(3,2)plot([1:10],x,'r');hold onhg=h*guji;abf=(hg(:,[1]))';%取guji矩阵的第一列即a,b ,f的值plot([1:10],abf,'b');hold onplot([1:10],y,'g');hold oncdg=(hg(:,[2]))';plot([1:10],cdg,'b');hold on xlabel('k(1-8代表1972到1980)'); ylabel('军事费用/百万美元');%写出坐标表头legend('北约实际值','北约估计值','华约克实际值','华约克估计值');title('北约与华约事费用对比'); hold offa =0.1540b =1.7438 f =-2.5468e+004 c = 0.0181 d =0.9675 g =2.0756e+003图三:华约与北约军事费用对比图据之间虽然存在区别,但是 二:题目要求:考虑理想数学模型为式中,)(k V 是服从正态分布的白噪声)1,0(N 。
系统辨识实验报告
系统辨识实验报告SA08157051 杜鹏超一 选择的系统模型类选择系统模型如下:se TsK τ-=G(S)然后多系统模型离散化,即;⎩⎨⎧⎭⎬⎫=--s s e TsK s e z ττG(z)二 辨识的原理,方法和公式 y(i)=-a*y(i-1)+b*u(i-1)⎪⎪⎩⎪⎪⎨⎧-+--=+-=+-=)1()1()()2()2()3()1()1()2(n bu n ay n y bu ay y bu ay y 令 T θ=[-a b] x(k)=[y(k-1) u(k-1)]或⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=)1()1()2()2()1()1(X n u n y u y u y⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)()3()2(y(N) n y y y 即y=x θ+e1.批量最小二乘估计算法最小二乘估计准则:模型拟合残差为θϕε)()()(k k y k T-=则有目标函数J 为:∑==ki i k J 12)()(ε把数据代入拟合残差得:θϕε)()()(n n y n T-=下面从最小二乘准则推导正规方程。
根据术极值原理可知,最小二乘估计θ满足⎪⎪⎩⎪⎪⎨⎧∂∂∂∂=∂∂-为正定T J J LS )(0θθθθθJ 还可写成)()()(k k k J T εε=θφφθθφθφεε T T T T Ty y y y k k k J 2)()()()(-=--==)(上式中为简单起见,略去了有关各项的(n)。
⎪⎪⎩⎪⎪⎨⎧=∂∂∂∂=+-=∂∂-为正定φφθθθφφφθθθTT LS TT J y J LS 2)(022于是得:y TT ls φφφθ1)(-=的最小二乘估计为)()())()(()(1k y k x k x k x k T T -=θ2.递推最小二乘估计算法原式为)()1()1(1k e k xk y T ++=++θ得新解)1()1())1()1(()1(1++++=+-k y k x k x k x k TTθ其中:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+=+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+=+)1()()1()1()()1(k y k y k y k x k x k x T T 令:2)]1()1([)1(++=+k x k x k p T可求得)1()()1(1)1()()1(++++=+k X k p k X k x k p k k T T)]()1()1()[1()()1(k k x k y k K k k Tθθθ +-+++=+)]()1(1[)1(k x k K k p T θ++=+3 渐消记忆递推最小二乘估计算法修改目标两数J ,对残差平方加指数权λ∑=-=ki ik i k J 12)()(ελ其巾λ=0.9—0.999愈大遗忘愈慢。
系统辨识及自适应控制实验报告
系统辨识及自适应控制实验报告实验报告:系统辨识及自适应控制1.引言系统辨识和自适应控制是现代自动控制领域中的重要研究内容。
系统辨识是通过采集系统输入输出数据,建立数学模型描述系统的动态行为。
自适应控制则是根据系统辨识得到的模型,调整控制器参数以适应系统的变化和外部干扰。
本实验旨在通过实际操作,掌握系统辨识和自适应控制的基本原理和方法。
2.实验目的1)了解系统辨识的基本原理和方法;2)掌握常见的系统辨识方法,包括参数辨识和频域辨识;3)理解自适应控制的基本原理和方法;4)熟悉自适应控制的实现过程;5)通过实验验证系统辨识和自适应控制的有效性。
3.实验原理3.1系统辨识原理系统辨识的目标是通过采集系统输入输出数据,建立数学模型来描述系统的动态特性。
常见的系统辨识方法包括参数辨识和频域辨识两种。
参数辨识是通过拟合实际测量数据,找到最佳的模型参数。
常用的参数辨识方法有最小二乘法、极大似然法和最小误差平方等。
频域辨识则是通过对输入输出信号的频谱分析,得到系统的频率响应特性。
常用的频域辨识方法有傅里叶变换法、相关分析法和谱估计法等。
3.2自适应控制原理自适应控制是根据系统辨识得到的模型,调整控制器参数以适应系统的变化和外部干扰。
自适应控制分为基于模型的自适应控制和模型无关的自适应控制。
基于模型的自适应控制利用系统辨识得到的模型参数,设计相应的控制器来实现自适应控制。
常见的基于模型的自适应控制方法有模型参考自适应控制和模型预测自适应控制等。
模型无关的自适应控制则不依赖于系统辨识的模型,而是根据实际测量数据直接调整控制器参数。
常见的模型无关的自适应控制方法有自适应滑模控制和神经网络控制等。
4.实验内容4.1系统辨识实验在实验中,我们通过采集系统输入输出数据,根据最小二乘法进行参数辨识。
首先设置系统的输入信号,如阶跃信号或正弦信号,并记录对应的输出数据。
然后根据采集到的数据,选取适当的模型结构,通过最小二乘法求解最佳的模型参数。
系统辨识实验报告
系统辨识实验报告学院:信息科学与技术学院专业:自动化日期:2016/4/26目录实验1 .................................................... 错误!未定义书签。
一.实验内容及要求: ................................... 错误!未定义书签。
二.实验原理:......................................... 错误!未定义书签。
三.软件设计思想: ..................................... 错误!未定义书签。
四.程序结构框图: ..................................... 错误!未定义书签。
五.运行示意图: ....................................... 错误!未定义书签。
实验2 .................................................... 错误!未定义书签。
一.实验内容及要求: ................................... 错误!未定义书签。
二.实验原理:......................................... 错误!未定义书签。
三.软件设计思想: ..................................... 错误!未定义书签。
四.程序设计框图: ..................................... 错误!未定义书签。
五.程序运行流程图: ................................... 错误!未定义书签。
实验3 .................................................... 错误!未定义书签。
一.实验内容及要求: ................................... 错误!未定义书签。
系统辨识实验报告 中科大
1.5 预处理后检验
把原始数据分成两部分,一部分用来辨识,一部分用来检验模型。 预处理后便是部分输入的图像
预处理后便是部分输出的图像
预处理后检验数据部分输入图像
预处理后检验部分输出部分
2 辨识算法
以下 n 的取值均为 2,在以下部分为给出为什么 n 取 2 最好
2.1 批量最小二乘
2.1.1 源代码 %批量最小二乘算法 dafi=ones(N,2*n); for i=0:N-1 dafi(i+1,:)=[-vo_iden(i+1:i+n)' vi_iden(i+1:i+n)']; end cta=inv(dafi'*dafi)*dafi'*vo_iden(n+1:n+N); Y1=test*cta; %plot(Y1); E1=Y1-vo_test(n+1:n+N); En1(1,n)=E1'*E1; cta 2.1.2 辨识结果
2.3.2 辨识结果
2.3.3 模型检验 (1)用测试数据输入后得到的图像
(2)和实际偏差的曲线
2.4 增广最小二乘法
2.4.1源代码 %增广最小二乘算法 p=eye(3*n)*1000; cta=ones(3*n,1); w=zeros(n,1); W=ones(N,n); for i=0:N-1 fi=[-vo_iden(i+1:i+n)' vi_iden(i+1:i+n)' w']; k=(p*fi')/(1+fi*p*fi'); cta=cta+k*(vo_iden(i+1)-fi*cta); p=p-k*fi*p; for j=1:n-1 w(j,1)=w(j+1,1); end w(n,1)=vo_iden(i+1)-fi*cta; end w=zeros(n,1); for i=0:N-1 W(i+1,:)=w; s=[-vo_test(i+1:i+n)' vi_test(i+1:i+n)' w']; for j=1:n-1 w(j,1)=w(j+1,1); end w(n,1)=vo_test(i+1)-fi*cta; end teste=[test W]; Y4=teste*cta; %plot(Y4); E4=Y4-vi_test(n+1:n+N); En4(1,n)=E4'*E4; cta 2.4.2 辨识结果
系统辨识实验报告
系统辨识实验报告——C语言版目录实验一 .......................................................错误!未定义书签。
实验分析..................................................错误!未定义书签。
实验代码..................................................错误!未定义书签。
运行结果..................................................错误!未定义书签。
实验二 .......................................................错误!未定义书签。
实验分析..................................................错误!未定义书签。
实验代码..................................................错误!未定义书签。
运行结果..................................................错误!未定义书签。
实验三 .......................................................错误!未定义书签。
实验分析..................................................错误!未定义书签。
实验代码..................................................错误!未定义书签。
运行结果..................................................错误!未定义书签。
实验四 .......................................................错误!未定义书签。
系统辩识实验报告

一、实验目的1. 理解系统辨识的基本概念和原理。
2. 掌握递推最小二乘算法在系统辨识中的应用。
3. 通过实验,验证算法的有效性,并分析参数估计误差。
二、实验原理系统辨识是利用系统输入输出数据,对系统模型进行估计和识别的过程。
在本实验中,我们采用递推最小二乘算法对系统进行辨识。
递推最小二乘算法是一种参数估计方法,其基本思想是利用当前观测值对系统参数进行修正,使参数估计值与实际值之间的误差最小。
递推最小二乘算法具有计算简单、收敛速度快等优点。
三、实验设备1. 电脑一台,装有MATLAB软件。
2. 系统辨识实验模块。
四、实验步骤1. 打开MATLAB软件,运行系统辨识实验模块。
2. 在模块中输入已知的系数a1、a2、b1、b2。
3. 生成输入序列u(t)和噪声序列v(t)。
4. 将输入序列u(t)和噪声序列v(t)加入系统,产生输出序列y(t)。
5. 利用递推最小二乘算法对系统参数进行辨识。
6. 将得到的参数估计值代入公式计算参数估计误差。
7. 仿真出参数估计误差随时间的变化曲线。
五、实验结果与分析1. 实验结果根据实验步骤,我们得到了参数估计值和参数估计误差随时间的变化曲线。
2. 结果分析(1)参数估计值:通过递推最小二乘算法,我们得到了系统参数的估计值。
这些估计值与实际参数存在一定的误差,这是由于噪声和系统模型的不确定性所导致的。
(2)参数估计误差:从参数估计误差随时间的变化曲线可以看出,递推最小二乘算法在短时间内就能使参数估计误差达到较低水平。
这说明递推最小二乘算法具有较好的收敛性能。
(3)参数估计误差曲线:在实验过程中,我们发现参数估计误差曲线在初期变化较快,随后逐渐趋于平稳。
这表明系统辨识过程在初期具有较高的灵敏度,但随着时间的推移,参数估计误差逐渐减小,系统辨识过程逐渐稳定。
六、实验结论1. 递推最小二乘算法在系统辨识中具有较好的收敛性能,能够快速、准确地估计系统参数。
2. 实验结果表明,递推最小二乘算法能够有效减小参数估计误差,提高系统辨识精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验一:系统辨识的经典方法
一、实验目的
掌握系统的数学模型与输入、输出信号之间的关系,掌握经辨辨识的实验测试方法和数据处理方法,熟悉MATLAB/Simulink环境。
二、实验内容
1、用阶跃响应法测试给定系统的数学模型
在系统没有噪声干扰的条件下通过测试系统的阶跃响应获得系统的一阶加纯滞后或二阶加纯滞后模型,对模型进行验证。
2、在被辨识系统中加入噪声干扰,重复上述1的实验过程。
三、实验方法
在MATLAB环境下用Simulink构造测试环境,被测试的模型为水槽液位控制对象。
利用非线性水槽模型(tank)可以搭建单水槽系统的模型,也可以搭建多水槽系统的模型,多水槽模型可以是高低放置,也可以并排放置。
1.噪声强度0.5,在t = 20的时候加入阶跃测试信号相应曲线
2.乘同余法产生白噪声
A=19;N=200;x0=37;f=2;M=512; %初始化;
for k=1: N %乘同余法递推100次;
x2=A*x0; %分别用x2和x0表示xi+1和xi-1;
x1=mod(x2,M); %取x2存储器的数除以M的余数放x1(xi)中;
v1=x1/M; %将x1存储器中的数除以256得到小于1的随v(:,k)=(v1-0.5 )*f;
x0=x1; % xi-1= xi;
v0=v1;
end %递推100次结束;
v2=v;
k1=k;
h=k1;
%以下是绘图程序;
k=1:1:k1;
plot(k,v,'r');
grid on
set(gca,'GridLineStyle','*');
grid(gca,'minor')
3.白噪声序列图像
020406080100120140160180200
-1
-0.8
-0.6
-0.4
-0.2
0.2
0.4
0.6
0.8
1
四、 思考题
(1) 阶跃响应法测试系统数学模型的局限性。
答:只适用于某些特殊对象或者低阶简单系统;参数估计的精度有限,估计方法缺乏一般性。
(2) 对模型测试中观察到的现象进行讨论。
答:由系统的阶跃响应曲线可以看出,加入干扰后二阶系统明显比一阶系统相应缓慢,但由于此系统是自恒模型,故最终将从一个稳态到另一个稳态。
实验二:相关分析法与最小二乘法
一、实验目的
掌握相关分析法和最小二乘法测试系统数学模型的过程和方法,掌握应用移位计数器设计M序列信号发生器的方法。
二、实验内容
1、设计并实现PRBS伪随机序列信号(M序列)发生器;
2、应用相关分析法和最小二乘法测试给定系统的数学模型。
3、模型验证。
三、相关分析法
1.相关分析法源程序
aa=5;NNPP=15;ts=2;
RR=ones(15)+eye(15);
for i=15:-1:1
UU(16-i,:)=UY(16+i:30+i,1)';
end
YY=[UY(31:45,2)];
GG=RR*UU*YY/[aa*aa*(NNPP+1)*ts];
plot(0:2:29,GG)
hold on
stem(0:2:29,GG,'filled')
ggg = [GG(2:4,1) GG(3:5,1) GG(4:6,1)]; gg1=-[GG(5:7,1)]; aaa=ggg^-1*gg1
bbb=[1 0 0 0;aaa(3,1) 1 0 0;aaa(2,1) aaa(3,1)
1 0;aaa(1,1) aaa(2,1) aaa(3,1) 1 ];
bbb*GG(1:4,1)
num=[0.0566 0.0686 -0.4182 -0.3151]; den=[1 -3.5602 2.8339 -0.6549]; SYSD=tf(num,den)
2相关分析法阶跃响应曲线
0510********
0.050.10.150.20.250.30.350.4
3参数辨识结果
a =
-0.6549 2.8339 -3.5602
1.0000 0 0 0
-3.5602 1.0000 0 0
2.8339 -
3.5602 1.0000 0
-0.6549 2.8339 -3.5602 1.0000
b =
0.0566
0.0686
-0.4182
-0.3151
因此可知系统脉冲传递函数为:
SYSD =
0.0566 z^3 + 0.0686 z^2 - 0.4182 z - 0.3151
---------------------------------------------------------
z^3 - 3.56 z^2 + 2.834 z - 0.6549
四、最小二乘法
1.最小二乘法源程序
na=3; nb=2;d=0; %na、nb为A、B阶次
L=200; %仿真长度
%uk=zeros(d+nb,1); %输入初值:uk(i)表示u(k-i)
%yk=zeros(na,1); %输出初值
uk=UY(1:200,1)'; %输入初值:uk(i)表示u(k-i)
yk=UY(1:200,2)'; %输出初值
%u=randn(L,1); %输入采用白噪声序列
%xi=sqrt(50)*randn(L,1); %白噪声序列
%theta=[a(2:na+1);b]; %对象参数真值
thetae_1=zeros(na+nb+1,1); %thetae初值
P=10^6*eye(na+nb+1);
for k=4:L
phi=[-yk((k-1):-1:(k-3)) uk(k:-1:(k-2))]; %此处phi为列向量
%y(k)=phi'*theta+xi(k); %采集输出数据
%递推最小二乘法
K=P*phi'/(1+phi*P*phi');
thetae(:,k)=thetae_1+K*(yk(k)-phi*thetae_1); P=(eye(na+nb+1)-K*phi)*P;
%更新数据
thetae_1=thetae(:,k);
for i=d+nb:-1:2 uk(i)=uk(i-1); end
%uk(1)=u(k);
for i=na:-1:2
yk(i)=yk(i-1); end
% yk(1)=yk(k); end
plot([1:L],thetae); %line([1,L],[theta,theta]); grid on;
xlabel('k'); ylabel('参数估计a 、b'); legend('a_1','a_2','a_3','b_0','b_1','b_2');
2.最小二乘法参数估计曲线
20406080
100120140160180200
-1-0.8
-0.6
-0.4
-0.2
00.2
0.4
0.6
k
参数估计a 、b
a 1a 2a 3
b 0b 1b 2
因此可以得出参数:
a1 = -1.1981; a2 = 0.3680; b1 = -0.0099; b1 = 0.3845;
故易知系统的脉冲传递函数。
3.最小二乘法阶跃响应曲线
0510********
0.05
0.1
0.15
0.2
0.25
0.3
0.35
五、 最小二乘法与相关分析法比较
0510********
0.05
0.1
0.15
0.2
0.25
0.3
0.35
由图可知两种方法辨识出的系统模型基本相同。
六、实验总结
通过这几次实验,我对系统辨识有了更深的了解,对系统搭建有了基本的了解。
巩固了课上学习的相关分析法,以及最小二乘法的方法,步骤,处理数据方式。
同时,熟悉了MATLAB的使用方法及语法结构。