Z变换和离散时间系统的Z域分析
Z变换离散时间系统的Z域分析
| x[n] | M
n1
z 1
显然lim X (z) x[0]
z
学习材料
22
§8.2 Z变换及其收敛域
终值定理:假设n<0,xn]=0,则序列的终值为
lim x[n] lim{( z 1)X (z)}
n
z1
证明:利用单边Z 变换时移性质,有:
Z{x[n 1]} x[n 1]zn zX (z) zx[0] n0
注:交集 R1 一R2般小于R1或R2。但有时会扩大,如
零点与极点相消时。
学习材料
15
§8.2 Z变换及其收敛域
2).时域平移(双边信号〕
x[n] X (z), ROC Rz x[n n0 ] zn0 X (z), ROC Rz ,
证明:依据双边Z变换的定义式,有
Z[x[n n0 ]} x[n n0 ]zn zn0 x[k]zk
X (z) x[n]r ne jn DTFT{x[n]r n} n
DTFT{x[n] | z |n}
即x[n] | z |n 是收敛的
假设 x[n] | z |n x[n] n , n由0 .
| z |n n | z |
即,右边函数时收敛域为| z|>α的圆外地域。
其它信号依学习此材料 类推…。
z
,
n0
z 1
极点z1 1,
1
Re
∴收敛域为 |z|>1 的单位圆以外。
ROC | z | a
例8-2.求 x[n] anu的[nz变1换] 。xn]是一个从-1到-∞的左
边序列。
解:
X (z) x[n]zn anu[n 1]zn
n
n
1
第八章-Z变换与离散系统z域分析

第八章:Z 变换§8.1 定义、收敛域(《信号与系统》第二版(郑君里)8.1,8.2,8.3)定义(Z 变换): ♦序列()x n 的双边Z 变换:()(){}()nn X z x n x n z+∞-=-∞∑Z(8-1)♦序列()x n 的单边Z 变换:()(){}()0n n X z x n x n z +∞-=∑Z(8-2)注:1)双边:()()()()10nnn n n n X z x n zx n zx n z +∞-∞+∞---=-∞=-===+∑∑∑(8-3)为Laurent 级数,其中,()1nn x n z-∞-=-∑是Laurent 级数的正则部,()0nn x n z+∞-=∑是主部。
2)z 是复平面上的一点图8-13)对因果序列:单边Z 变换=双边Z 变换。
♦定义(逆Z 变换):对双边Z 变换()()nn X z x n z+∞-=-∞=∑()1C1d 2j m z X z z π-⎰(1C 12j m n z x π+∞-=-∞⎡=⎢⎣∑⎰ ()C 12j m n x n z π+∞=-∞⎡=⎢⎣∑⎰由Cauchy 定理,有1C d 0,2j m n z z m nπ--=⎨≠⎩⎰ (8-4)其中,C 为包围原点的闭曲线,()()1C1d 2j m x m z X z z π-∴=⎰上式= 定义:()()(){}11C1d 2j n x n z X z z X z π--==⎰Z(8-5)注:(8-4)的求解:j z re θ=,j d j d z r e θθ=,则有()()21110C 2011d 2j 2j 1102j m n m n m n j j m n m n z z r e rje d m n r e d m nπθθπθθππθπ--------==⎧==⎨≠⎩⎰⎰⎰,,图8-2 柯西定理证明示意图收敛域: ♦定义(收敛域):对有界()x n ,使()()nn X z x n z+∞-=-∞=<∞∑一致的z 的集合。
第二章z变换

ˆ ( s ) Lx (t ) L x(nT ) (t nT ) Xs s n
st ˆ s x t e st dt XS x(nT ) (t nT )e dt s n
解:
X 1 ( z ) Z x1[n] a n z n
n0
如果|z|>a, 则上面的级数收敛, 1 z n n X1 ( z) a z 1 za 1 az n0
X 2 ( z ) Z x2 [n]
n
z a
(a n ) z n
lim
n
an1 ρ an
2.根值判定法 即令正项级数的一般项 a n 的n次根的极限等于,
lim n a n
n
则
<1:收敛 =1:可能收敛也可能发散 >1:发散
例2.1
例已知两序列分别为x1[n]=anu[n], x2[n]= -anu[-n-1],分别 求它们的z变换,并确定它们的收敛域。
1
a z 1 (a 1 z ) n
n n n 1 n0
1 z 1 1 1 a z z a
za
两个不同的序列对应于相同的z变换,但它们的收敛域不同。
三 几类序列的Z变换收敛域
1、有限长序列 此序列只在有限的区间(n1n n2)具有非零的有限值, 此时,Z变换为: n2
n
b u ( n 1)z
n
n
= a z
n n 0
n
n
b
n 0
1
z
n
= a z
实验十一z变换及离散时间系统z域分析分析解析
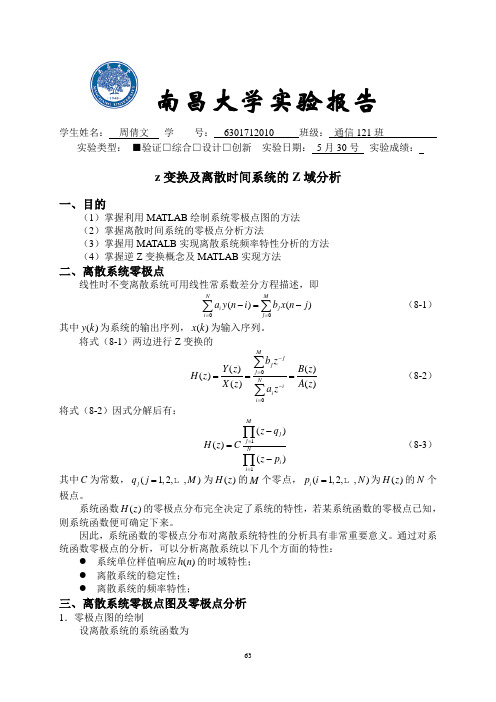
南昌大学实验报告学生姓名: 周倩文 学 号: 6301712010 班级: 通信121班实验类型: ■验证□综合□设计□创新 实验日期: 5月30号 实验成绩:z 变换及离散时间系统的Z 域分析一、目的(1)掌握利用MATLAB 绘制系统零极点图的方法 (2)掌握离散时间系统的零极点分析方法(3)掌握用MATALB 实现离散系统频率特性分析的方法 (4)掌握逆Z 变换概念及MATLAB 实现方法二、离散系统零极点线性时不变离散系统可用线性常系数差分方程描述,即()()N Miji j a y n i b x n j ==-=-∑∑ (8-1)其中()y k 为系统的输出序列,()x k 为输入序列。
将式(8-1)两边进行Z 变换的00()()()()()Mjjj Nii i b zY z B z H z X z A z a z-=-====∑∑ (8-2) 将式(8-2)因式分解后有:11()()()Mjj Nii z q H z Cz p ==-=-∏∏ (8-3)其中C 为常数,(1,2,,)j q j M =为()H z 的M 个零点,(1,2,,)i p i N =为()H z 的N 个极点。
系统函数()H z 的零极点分布完全决定了系统的特性,若某系统函数的零极点已知,则系统函数便可确定下来。
因此,系统函数的零极点分布对离散系统特性的分析具有非常重要意义。
通过对系统函数零极点的分析,可以分析离散系统以下几个方面的特性:● 系统单位样值响应()h n 的时域特性; ● 离散系统的稳定性; ● 离散系统的频率特性;三、离散系统零极点图及零极点分析 1.零极点图的绘制设离散系统的系统函数为()()()B z H z A z =则系统的零极点可用MATLAB 的多项式求根函数roots()来实现,调用格式为:p=roots(A)其中A 为待根求多项式的系数构成的行矩阵,返回向量p 则是包含多项式所有根的列向量。
郑君里《信号与系统》(第3版)笔记和课后习题(含考研真题)详解-第8章 z变换、离散时间系统的z域分

(7)
X
z
1 2
n
u
n
u
n
10
z
n
9 n0
1 2
n
z
n
9 n0
1 2z
n
1
1 2z
1 1
10
z 0
2z
X(z)的零、极点分布图如图 8-2-1(g)所示。
(8)
8 / 75
圣才电子书
十万种考研考证电子书、题库视频学习平
X
z
n台
1 2
圣才电子书
十万种考研考证电子书、题库视频学习平
台
第 8 章 z 变换、离散时间系统的 z 域分析
8.1 复习笔记
从本章开始陆续讨论 Z 变换的定义、性质以及它与拉氏变换、傅氏变换的联系。在此 基础上研究离散时间系统的 z 域分析,给出离散系统的系统函数与频率响应的概念。通过 本章,读者应掌握对于离散时间信号与系统的研究,是先介绍 z 变换,然后引出序列的傅 里叶变换以及离散傅里叶变换(第九章)。
4 / 75
圣才电子书
十万种考研考证电子书、题库视频学习平
台
于实轴的直线映射到 z 平面是负实轴;
(3)在 s 平面上沿虚轴移动对应于 z 平面上沿单位圆周期性旋转,每平移 ωs,则沿
单位圆转一圈。
2.z 变换与拉氏变换表达式
Z
x nT X z zesT X s Z
n
u
n
1 3
n
u
n
z
n
n
(3)
X
z
n
1 3
n
u
n
z
n
n0
第八章_离散时间系统的z域分析4_北京交通真题库_大学915916通信系统及原
z0
七阶极点
j Im[z]
z
1 3
一阶极点
Re[z]
z 0
27
§8.4 逆z变换
X (z) ZT[x(n)] x(n)zn n
x(n) ZT 1[ X (z)] 1 X (z)zn1dz
2 j C
C是包围X(z)zn-1所有极点的逆时针闭合积分路线,一
般取z平面收敛域内以原点为中心的圆。
n0
n
an zn 1 bn zn
n0
n0
z a, z b
X (z) z 1 b za zb zz
za zb
25
jIm(z)
a
0
Re(z)
jIm(z)
a
0 b
Re(z)
图8.1序列单边Z变换的收敛域
图8.2序列双边Z变换的收敛域
当 z a时,X (z) z 当a z b时,X (z) z z
d s j
j
)
!
d
zs
j
(z
zi )s
X (z)
z
zzi
32
或X (z)
A0
M m1
1
Am zm
z
1
s j 1
Cj (1 zi z1) j
A0
M m1
Am z z zm
C1z z zi
C2 z2 (z zi )2
Cs (z
zs zi )s
Cs
1 zi z1
s
X
(
z
)
z
6
§8.2 z变换的定义、典型序列的z变换
➢ 借助于抽样信号的拉氏变换引出。 ➢ 连续因果信号x(t)经均匀冲激抽样,则抽样信号xs(t)
第8章Z变换及其离散时间系统的Z域分析

第8章Z变换及其离散时间系统的Z域分析第8章Z变换及其离散时间系统的Z域分析学习⽬标了解z变换与拉⽒变换之间的联系掌握不同序列收敛域的特点熟练掌握基本信号的z变换及其基本性质熟练利⽤基本信号的z变换和基本性质求解信号的变换式熟练掌握求逆变换的部分分式展开法、长除法掌握周期信号的z变换及其逆变换的求解⽅法理解并掌握系统函数的概念及其4种求解⽅法掌握利⽤系统函数零极点分析系统的稳定性掌握系统函数与系统框图之间的对应关系重点定义式的透彻理解基本性质的灵活应⽤周期序列的z变换由系统函数零极点分析系统特性系统函数、差分⽅程、冲激响应及系统框图之间的内在联系难点周期序列的z变换由系统函数零极点分析系统特性H z画出系统的仿真框图和信号流图根据()8.1 Z 变换的定义8.1.1 Z 变换的基本定义1. Z 变换的定义对于给定的离散时间信号,Z 变换定义:()nn F z f n z ∞-=-∞=∑()简记为:[]()[()]Z+-+-++++()()()()()当0n <时,它是 z 的正幂级数;⽽当0n >时,它是 z 的负幂级数。
牢记这个特征,对今后的学习是很有帮助的。
对⼀些简单的序列,我们可以利⽤这个特征直接写出其变换式。
例题:()2(3)3(2)4(1)3()2(2)f n n n n n n δδδδδ=+++++++- 则该序列的Z 变换式为322()[()]()23432nn F z Z f n f n z z z z z ∞-=-∞-===++++∑由此也可以看到, Z 变换是由各个样点序列值的Z 变换之和组成,每个样点的序列值都对应⼀个 Z 变换。
如果()f n 是右边序列,⼜称为因果序列。
则:单边Z 变换:0()()nn F z f n z∞-==∑,简记为:()()Zf n F z ←?→Z 变换和拉普拉斯变换之间的关系,可以利⽤采样信号拉普拉斯变换说明如下: ()()()()()s n n f nT f t t nT f nT t nT δδ+∞+∞=-∞=-∞=-=-∑∑()()snTs n F s fnT e +∞-=-∞=∑ 令sTz e =,T=1,则()()ns n F z f n z=∑定义表明:Z 变换()F z 是关于复变量z 的幂级数。
Z变换与离散时间系统的Z域分析

第9章Z 变换与离散时间系统的Z 域分析z 变换是对离散序列进行的一种数学变换,其原始思想是英国数学家狄莫弗(De Moivre )于1730年首先提出的,之后,从19世纪的拉普拉斯(place )至20世纪的沙尔(H.L.Shal )等数学家不断对其进行了完善性研究。
z 变换在工程上的应用直到20世纪50年代与60年代随着采样数据控制系统、数字通信以及数字计算机的研究与实践迅速开展才得以实现,并成为分析这些离散系统的重要数学工具。
类似与连续系统分析中拉氏变换可以将线性时不变系统的时域数学模型—微分方程转化为s 域的代数方程,z 变换则把线性移 (时)不变离散系统的时域数学模型—差分方程转换为z 域的代数方程,使离散系统的分析同样得以简化,还可以利用系统函数来分析系统的时域特性、频率响应以及稳定性等,因而在数字信号处理、计算机控制系统等领域中有着非常广泛的应用。
本章主要讨论z 变换的定义、收敛域、性质等基础知识,并在此基础上研究离散时间系统的z 域分析、离散时间系统的频域分析等方面的内容。
9.1 Z 变换的定义z 变换的定义可以从两个方面引出,一是由采样信号的拉氏变换过渡到z 变换,二是直接针对离散信号得出。
为了强调拉氏变换与z 变换之间的联系,首先从抽样信号的拉氏变换推演出z 变换。
9.1.1 从抽样信号的拉氏变换导出z 变换定义在区间t -∞<<∞上的任意有界连续信号()()()x t x t <∞经过单位冲激周期信号 ()()T n t t nT δδ∞=-∞=-∑ 抽样后所得到的抽样信号()s x t 可以表示为()()()()()()()s T n n x t x t t x t t nT x nT t nT δδδ∞∞=-∞=-∞==-=-∑∑ (9.1)式(9.1)中,T 为抽样间隔,对式(9.1)取双边拉氏变换可得()()()()st st s s n X s x t e dt x nT t nT e dt δ∞∞∞---∞-∞=-∞⎡⎤==-⎢⎥⎣⎦∑⎰⎰ 交换积分与求和次序,并利用冲激函数的性质可得()()() ()st snT s n n X s x nT t nT e dt x nT e δ∞∞∞---∞=-∞=-∞=-=∑∑⎰ (9.2) 式(9.2)中snT e -并非复变量s 的代数式,故引入一个新的复变量z ,即令11n sT z e s z T ⎫=⎪⎬=⎪⎭(9.3) 这样,式(9.2)变为变量z 的函数,有()()1ln ()n s s z T n X s x nT z X z ∞-==-∞==∑ (9.4)于是得到一个以z 为变量的代数式,即序列()x nT 的z 变换()X z ,其本质上是序列()x nT 的拉氏变换。
第8章 z变换、离散时间系统的z域分析

第八章z变换、离散时间系统的z域分析8.1 引言8.2 z变换的定义8.3 z变换的收敛域8.4 逆z变换8.5 z变换的基本性质8.6 z变换与拉普拉斯变换8.7 用z变换解差分方程8.8 离散系统的系统函数8.10 离散时间系统的频率响应特性§8.1 引言一.z 变换的导出我们从抽样信号的拉氏变换导出离散信号的z 变换()()∑∞−∞=−=⋅=n T nT t t x t t x t x δδ)()()(s ∑∑∞−∞=∞−∞=−=−=n n nT t n x nT t nT x )()()()(δδO t()t x s T T2()()nT t nT x −δOn()n x 12对连续信号x s (t )抽样得到离散信号x (n )[]()∑∑∑∞−∞=−∞−∞=−∞−∞===−=n nT s n Tn s n e n x en x nT t n x )()()()(δL j ωσs +=()()n x nT x e z sT表示为并将,引入复变量 =)()(|)(s z X zn x s X n ne s sT ==∑∞−∞=−=)(变换式为的(双边)对任一信号z n x ∑∞−∞=−=nnzn x z X )()([]⎥⎦⎤⎢⎣⎡−==∑∞−∞=n nT t n x t x s X )()()()(s s δL L 取拉氏变换对)(s t x ()[]00t s et t −=−δL∑∞−∞=−=n nzn x z X )()(���������������…⋯���������…的负幂的正幂z nz z n x z x z x z x z x z x +++++−+−=−−−)()2()1()0( )1()2(21012变换单边z zn x z X n n∑∞=−=0)()(右边序列的负幂级数的系数构成z n 0∞<≤左边序列的正幂级数的系数构成z n 1−≤<∞−变换或对因果信号取变换若双边序列取单边z z ,()的幂级数是1−z z X ()的位置指出中的幂 n x n n −()n x 级数的系数是二.对z 变换式的理解§8.2 z变换的定义典型序列的z变换z 变换的定义()[]∑∞=−==0)()(n nzn x n x z X z Z 变换单边∑∞∞=−=-变换双边n nzn x z X z )()(()()()变换为的时即当对于因果序列z n x n n x 0,0=<()变换为的对于双边序列z n x )(重点讨论())(z X n x ⎯→←())(z X n x TZ ⎯⎯→←或典型序列的z 变换⎩⎨⎧≠==001)(n n n δ()[]()10)()(0====∑∞−∞=−z zn n z X n nδδδZ nO)(n δ1一. 单位样值序列()[]⋯++++===−−−∞=−∑3211)(z z z zn u z X n nZ 二.单位阶跃序列⎩⎨⎧<≥=001)(n n n u nO)(n u 1123⋯三.斜变序列()[]∑∞=−===0)()()(n nnzn nu z X n nu n x Z ,下面用间接方法求其 z 变换的和函数。
第八章Z变换、离散时间系统的Z域分析
n
n0
n
z Rx2
z Rx1
若 Rx2 Rx1, X (z) 收敛域:Rx1 z Rx2
j Im z
Rx2
Rx1
Re z
若 Rx2 Rx1, X (z) 不收敛。
第八章 Z变换、离散时间系统的 Z域分析 肖娟
例: x(n) anu(n) bnu(n 1)
求 X (z)并确定收敛域,其中 (b a 0) 。
, z 1
Z
[sin(0n)u(n)]
z sin 0 z2 2z cos0 1
, z 1
cos( n)u(n)
cos
2
n
u(n)
z2 z2 1
,
z
1
1
2
1,0, 1,0,1,0,
2
6
0
4
8n
sin
2
n
u(n)
z z2 1
, z 1 1 sin( n)u(n)
12
0,1,0, 1,0,1,
逆 z变
换方法
围线积分法(留数法):P56 例8-2 幂级数展开法: P57 例8-3、8-4
部分分式展开法:仅适用于X (z)为有理分式的情况
第八章 Z变换、离散时间系统的 Z域分析 肖娟
部分分式展开法
Z [anu(n)] z
,z a
za
Z [anu(n 1)] z , z a
za
X (z)
(5)Z
[cos(0n)u(n)] Biblioteka 1z 2 [ z e j0
z z e j0
]
z(z cos0 ) z2 2z cos0 1
e j0nu(n)
离散时间系统的z域分析

第七章 离散时间系统的z 域分析1.z 变换是如何提出的?它的作用是什么?z 变换是为分析离散时间系统而提出的一种工程分析方法,它在离散时间系统分析中的地位和作用等价于连续时间系统分析中的拉氏变换。
它可以看作为拉氏变换的推广。
z 变换定义为:()[]nn X z x n z∞-=-∞=∑ ---- 双边z 变换 (1)()[]nn X z x n z ∞-==∑---- 单边z 变换 (2) 其中z 是复变量,Re Im j z z j z re Ω=+=。
而对于取样信号的拉氏变换为()()()() ()() ()stst s s n st n snTn X s x t e dt x nT t nT e dtx nT e t nT dt x nT e δδ∞∞∞---∞-∞=-∞∞∞--∞=-∞∞-=-∞⎡⎤==-⎢⎥⎣⎦⎡⎤=-⎢⎥⎣⎦=∑⎰⎰∑⎰∑(3)如果 [](),x n x nT =令sT z e =,可以发现式(1)和式(3)相同。
2.双边z 变换和单边z 变换时如何定义的?它们的定义域是如何确定的?收敛域的意义是什么?z 变换定义为:()[]nn X z x n z∞-=-∞=∑ ---- 双边z 变换 (1)()[]nn X z x n z ∞-==∑---- 单边z 变换 (2) z 变换收敛域就是使上述级数收敛的所有z 的取值的集合。
根据级数收敛理论,一般我们用根值判别法或比值判别法来确定z 变换收敛域, 其作用是建立序列和z 变换之间的一一对应关系。
根据序列的不同性质,序列z 变换的收敛域各不相同,具体参阅教材Page 297-298 表7-1。
3.z 变换和拉氏变换之间有什么样的关系?具体分析见问题1中的式(1)和(3),根据两式,可以建立分析连续时间系统的拉氏变换的变量s 和分析离散时间系统的z 变换的变量z 之间的映射关系:sT z e =令, j z re s j σωΩ==+, 则有, Tr eT σω=Ω=, 具体见教材Page 300 表7-2 。
第8章 z变换离散时间系统的z变换分析

-n -n
收敛域 为 z >1
3. 斜变序列
间接求 解方法 已知 两边对(z -1)求导
两边乘(z -1)
∴
同理,两边再求导,得
…
4. 指数序列
x(n) a n u(n)
运用留数定理来进行运算。又称为留数法,即
f (n) Res[F ( z )z n1 ]z pm
m
略!
二、幂级数展开法(长除法)
F ( z ) f (n)z n f (0) f (1)z 1 f ( 2)z -2
n 0
!
一般为变量z的有理分式,可用长除法,
例
s = 2,
例题 解
求x(n) = ?
∴
∴
见P60~61,表8-2、8-3、8-4(逆z变换表) 作业:P103,8-5 (1)(2)
8.5 z变换的基本性质
一、线性 若 x(n) ←→ X(z) y(n) ←→ Y(z)
则
Rx1 < |z| < Rx2 Ry1 < |z| < Ry2
ax(n) + by(n) ←→ aX(z) + bY(z)
F ( z ) f (0) f (1) z 1 f (2) z 2
所以
f (0) 0, f (1) 1, f (2) 0, f (3) 3, f (4) 4,
重点!
三、部分分式展开法
一般Z变换式是有理函数
以下研究因果序列的逆变换,即
X(z) (|z|>R) ← Z → x(n)
对于N阶LTI离散系统的差分方程:
第七章 z变换、离散时间系统的z域分析 PPT课件

1
n
u(n)的z变换,
2
3
并标明收敛域,绘出零极点图。
解:Zx(n)
x(n)zn
1
n
z
+
n
1
n
z
n
1
n
+
1
n
n-
n0 2
n0 3
n0 2z n0 3z
当 1 2z
1即 z
1时,
1
n
2 n0 2z
1 1-1/(2z)
z z1
2
当1 3z
1即 z
1时,
1
n
X (z) k A
m
z
m0 z z
m
其中,z 是 X (z)的极点,z 0。
m
z
0
A m
z
z m
X (z) z
zzm
k
X (z)
Az m
m0 z z
m
k
m0
A m
z m
n
u
(
n),
(右边Fra bibliotek序列
)
x(n)
Z
X 1
(z)
Z
1
k
m0
A m
z
z z
m
k
m0
A m
z m
n
u(n
1),(左边序列)
级数的系数就是序列x(n)。
• 右边序列,N(z)、D(z)按z的降幂(或z-1的升幂)排列
X (z) x(n)zn x(0)z0 x(1)z1 x(2)z2 n0
• 左边序列,N(z)、D(z)按z的升幂(或z-1的降幂)排列
1
X (z) x(n)zn x(1)z1 x(2)z2 x(3)z3 n
郑君里《信号与系统》(第3版)章节题库(z变换、离散时间系统的z域分析)【圣才出品】

答:(1)f1(k)可以表示为
f1(k)=δ(k)+δ(k-2)+δ(k-4)+…
6.序列 【答案】 【解析】
的单边 z 变换及其收敛域是_____。
7.线性时不变离散因果系统的系统函数
,判断系统是否稳
定(填是或否)______。
【答案】是
【解析】
H (z) z2 z 1 ,其极点为 1 0.1, 2 0.5 ,因为两极点均在单位圆之内,故系
(z 0.1)(z 0.5)
F(z)
z
z 1
z
z 1
z2 z2 1
2.
的反 Z 变换为( )。
A.
B.
C.
D.
【答案】B
【解析】根据 z 变换的微积分性质,
nx(n) zX (z)
而
X
(z)
ln(1
a z
),
X
(z)
az 2 1 az1
1 / 92
圣才电子书
故
十万种考研考证电子书、题库视频学习平台
3 / 92
圣才电子书 十万种考研考证电子书、题库视频学习平台
【解析】
H(
z
)
Y( z ) X( z )
6 5z1 4 3z1 z2
,Y(
z
)(
4 3z1
z 2
)
X(
z
)( 6 5z1
)
,
差分方程
4y( n ) 3y( n 1) y( n 2 ) 6x( n ) 5x( n 1) 。
答:(1)由 z 变换的定义式可得
|z|>0
(2)因
f2(k)=ε(k+2)-ε(k)=δ(k+2)+δ(k+1)
第6章z变换离散时间系统的z域分析
《信号与系统》
6
第六章 z变换、离散时间系统的z域分析
2020年6月14日星期日1时51分5秒
收敛域一般用下式表示: Rx-<|z|<Rx+
收敛域一般是用一个环状域表示的,这里Rx-和 Rx+分别是两个圆的半径,收敛域就是用这两个圆形成 的环状域表示的,Rx-和Rx+称为收敛半径。当然Rx-可 小到零, Rx+可以大到无穷大。
《信号与系统》
12
第六章 z变换、离散时间系统的z域分析
2020年6月14日星期日1时51分7秒
例 2 求x(n)=RN(n)的Z变换及其收敛域。
N 1
解:
X (z) RN (n)zn zn 1 z1 z2 L z(N1)
n
n0
X (z)
1 zN 1 z1
,0
|
z
|
x(n) =RN(n)是一个有限长序列,它的非零值 区间是n=0~N-1,根据上面的分析, 它的收敛域应是
1
X (z) x(n)zn x(n)zn x(n)zn
nn1
nn1
n0
*第一项为有限长序列,第二项为z的负幂级数,
《信号与系统》
14
第六章 z变换、离散时间系统的z域分析
2020年6月14日星期日1时51分8秒
第一项为有限长序列,其收敛域为0<|z|<∞; 第二项为z的负幂次级数,其收敛域为
二.收敛域
2020年6月14日星期日1时51分3秒
我们知道,一个序列的Z变换有无意义, 首先要看它是否收敛,而收敛与否的判断又取 决于该变换收敛域的具体界定, 所以,讨论Z变 换,就必然要考虑其收敛域的确切情形。
1.定义:
z变换和离散时间系统z域分析-基本要求和知识要点

z 变换、离散时间系统的z 域分析一、基 本 要 求通过本章的学习,学生应该理解z 变换的定义、收敛域(ROC )的概念;掌握z 变换的性质,z 变换及逆z 变换的计算方法,以及离散系统的z 域分析法。
深刻理解系统函数)(z H 及)(z H 与离散系统因果性、稳定性的关系,离散系统的频率响应)(jw e H 。
能绘制系统的幅频响应、相频响应曲线。
二、知 识 要 点 1、z 变换(1) Z 变换定义(),z X ()[()]()z nn n x n z z x n x n z ξ∞--∞∞-=⎧⎪⎪==⎨⎪⎪⎩∑∑双边变换,单边变换若()()()x n x n u n =,则()x n 的单边z 变换()x n =的双边z 变换(2)z 变换的收敛域①一般地,双边序列()x n 的X ()z ,其收敛域为z 平面上以原点为中心的圆环内部,即12R R x x z <<;②有限长序列()x n 的X ()z ,其收敛域为整数个z 平面,即0z <<∞,也包括0z =或z =∞;③右边序列()x n 的X ()z ,其收敛域为某圆的外部,即1R x z <<∞,也可能包括z =∞;④左边序列()x n 的X ()z ,其收敛域为某圆的内部,即20R x z <<,可能包括0z =; (3)典型序列的z 变换[()]1n ξδ=, 0z ≤≤∞[()]1z u n z ξ=-, 1z > 2[()](1)zn u n z ξ=-, 1z >[()]u z a u n z aξ=-, z a >00[()]njw jw z eu n z eξ=-, 01jw z e >=(4)逆z 变换①围线积分法(留数法)1()R e s [X (z )z ]mn z z mx n -==∑式中R e s 表示极点的留数,m z 为1X (z)z n -的极点。
z变换离散时间系统的z域分析

教学目的
掌握z变换基本性质以及逆变换的求法
教学重点
z变换基本性质以及逆变换的求法
教学难点
逆变换的求法
教学方法
讲授
教学内容
若 ,则 的逆变换记作 ,它由以下围线积分给出:
是包围 所有极点之逆时针闭合积分路线,通常选择 平面收敛域内以原点为中心的圆。证明略。
求逆变换的计算方法有三种。
(一)留数法(围线积分法)
备注
章节
第八章z变换、离散时间系统的z域分析6-8节
日期
教学目的
使用z变换分析系统
教学重点
z变换解差分方程;离散系统的系统函数
教学难点
z变换解差分方程
教学方法
讲授
教学内容
三种变换域方法之间有着密切的联系,在一定条件下可以相互转化。第四章讨论过拉氏变换与傅氏变换的关系,现在研究 变换与拉氏变换的关系。
[例8-5]已知 ,求 。
解:
式中:
因此
由于收敛域 ,所以 是因果序列(右边序列),因此
[例8-6]已知 ,求 。
解:
所以
容易求得:
部分逆变换列于表8-2,3,4(P60)。
(一)线性
表现在叠加性与均匀性,若:
,
,
则:
,
其中, , 。相加后序列收敛域一般为两个收敛域的重叠部分,然而,如果在这些线性组合中某些零点与极点相抵消,则收敛域可能扩大。
解:对于 , 相应的序列 是因果序列(右边序列),这时 写成按 的降幂排列:
进行长除法可得:
得到:
对于 , 相应的序列 是左边序列,这时 写成按 的升幂排列:
进行长除法可得:
得到:
(三)部分分式展开法
《信号与系统》考点重点与典型题精讲(第7讲 z变换、离散时间系统的z域分析)(第2部分)
信号与系统考点重点与典型题精讲系列第7讲z变换、离散时间系统的z域分析
主讲人:马圆圆
网学天地
)
2.
3. 序列
研真题)
解:(1)
(b)
(a)
)由于系统为稳定系统,故有:π代入上式有:
6. 已知离散系统的差分方程为:
)
7. 离散系统,当y(k)=2U(k-1)
8. 已知系统的差分方程为:
)求H(z)=Y(z)/F(z);
(3)H(z)的极点为。
9. 已知离散系统的差分方程为
,则:
10. 已知离散系统的系统函
)
因为允许差一系数,不妨取
11. 已知二阶离散系统的初始条件为入f(k)=U(k)
解:系统函数
(
14.
15.
16. 已知离散系统差分方程表示式为:
(2)H(z)有两个极点p=1/4;有两个零点(3)
17. 已知离散时间系统的系统函数零极点分布如图所示,已
19.已知差分方程态为y(-1)=2
20.
21.
22.
23.已知如图所示系统。
仿真框图。
(2)求系统函数
(3)求单位样值响应
24.(国防科技大学考研题)对于如下差分方程所表示的离
25. (上海交通大学考研题)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Z[x(n)]
z z 1
z2
z 1
z2
z 1
z2
,
z
1
33
3. Z域尺度变换(乘以指数序列)
如果 Z [x(n) ]X (z),R xzR x,则
Z [a nx (n ) ]X (z); a
aR x za R x
证明: Z[a n x(n)] a n x(n) z n
n
x(n)( z )n X ( z ) ;
25
(2)部分分式法
X(z)a0 b 0 a 1 b z 1z b a r k1 z 1z r k 1 1 br a zkrzk
只有一 阶极点
k r
A0
b0 a0
X(z)A0
k
Amz
m1zpm
kr A00
X(z) mk11Apm mz1
X (z)
Am 是 z 在 Pm 处的留数
23
例 X (z) z32z21 (z1 ) x(n)? Z(z 1 )z(0.5)
解 z1 x(n) 必然是因果序列,右边序列
x(n) Res[X(z)zn1]zzm
n
z3 2z2 1 Resz(z1)(z0.5)
zn1 zzm
n2, z11, z2 0.5
n0, z11, z2 0.5, z3,4 0
rm
(m 0 z 0, )
(m 0, z 0)
1
(3) ZT[(n1)] (n1)zn (n1)zn
n
n0
z10z
(0z)
15
Z[u T (n ) ]n 0 u (n )z n 1 1 z 1 z z1 (z 1 )
Z[n T (n u ) ]n 0n(n u )z n (1 1 z 1 )2 (z z1 )2
2j C 22
x(n) 1 X(z)zn1dz
2j C
用留数求 围线积分
Res[X(z)zn1]zzm
一阶极点:
n
R s [ X ( z e ) z n 1 ] z z m [z ( z m ) X ( z ) z n 1 ] z z m
S 阶极点:
(s 11) !d dss z 11[X(z)zn1(zzm)s] zzm3j Im[z]
1 z 3 3
Re[ z ]
13
§8.3 典型序列的Z变换
• 单位样值序列 • 单位阶跃序列 • 斜变序列 • 指数序列 • 正弦余弦序列
14
(1 ) Z[T (n) ] (n)z n1(z0)
n 0
(2) ZT [ (n m)] (n m) z n
n0
(r ) z (r m) z m
X (z)n 0x(n)z nx(0)x(z1 )xz (2 2)
收敛域:当x(n)为有界时,令上述级数收敛的 z的
所有可取的值的集合称为收敛域
1)比值判别法 lim an1
n an
2) 根值判别法
limn
n
an
1 1 1
4
例:
x(n)anu(n)
X(z) anzn (a z1)n
第八章、Z变换和离散时间系统 的Z域分析
本章要点 • Z变换的基本概念和基本性质 • 利用Z变换解差分方程 • 离散系统的系统函数 • 离散系统的频率响应 • 数字滤波器
1
§8.1 Z变换的定义—由拉氏变
换引出Z变换
• 有抽样信号 xs(t) x(nT)(tnT)
• 单边拉氏变换
n0
X s (s)
dz
dz n
n
dz
nx (n ) z n 1 z 1
nx(n)z n
n
n
即, Z [nx (n)] z dX ( z ) dz
35
5. 共轭序列
如果 Z [x(n) ]X (z),R xzR x ,则
Z[x*(n)]X*(z*),Rx z Rx ; 其中, x*(n)为x(n)的共轭序列。
(1)双边序列:只在 n区间内,
有非零的有限值的序x列(n)
X(z) x(n)zn n
n
1
X(z) x(n)zn x(n)zn
n
n0
j Im[z]
圆内收敛
圆外收敛
Rx2 Rx1
Rx2 Rx1 Rx2 Rx1
有环状收敛域 没有收敛域
Re[ z ]
9
例: (1) x(n)1nu(n) 3
X(z) x(n)zn nn1
n1n
圆外为
收敛域
lim n x ( n ) z n 1
n
j Im[z]
lim n
n
x(n)
R x1
z
R x1
z R x1
Re[ z ]
收敛半径
7
(1)左边序列:只在n n2区间内,有非零的有限值的序列 x(n)
n2
X(z) x(n)zn n
nn2
n
a
a
Rx
z a
Rx;即
a Rx
z
a Rx
34
4. 序列的线性加权(Z域求导数)
如果 Z [x(n) ]X (z),R xzR x,则
Z [n(n x ) ] zd dX z(z),R xzR x
证明:X ( z )
x(n) z n , 对其两端求导得
n
dX ( z ) d [ x (n) z n ] x (n) d ( z n )
z8
(
1 3
)
8
e
j2 k
z e1
j
2
K 8
3
8个零点
z0
7阶极点
z
1 3
一阶极点
收敛域为除了 0 和
z 的整个 平面
j Im[z]
Re[ z ]
12
例:
(4) x(n) 1n
双边序列
3
X(z)
1
1 n
zn
1
z1
n
n 3
n0 3
z 1
8 3
z
z 3 z 1 (z 3)(z 13)
zm 1 X (z )d z zm 1 x (n )z n d z x (n )z n m 1 d
C
C n 0
n 0 C
21
• 由复变函数中的柯西定理
Czk1dz20j
k0 k0
• 只有右边的 nm 1 1即nm一项,
• 于是
X (z)zn1dz 2jx(n)
C
• 逆变换 x(n) 1 X (z)z n1dz
右边序列
X(z)1z1n
n03
1 11z1
zz1
3
3
j Im[z]
1 R x1 3
R x1
1 3
z 1 3
1
Re[ z ]
3
10
例: (2) x(n)1nu(n1) 3
X(z)
1
1
z1n
nm
1 z1 m
n 3
m13
左边序列
1 (3z)m
m0
1113z1
z
z 1
3
j Im[z]
R x2
30
Z变换的基本性质和定理
1.线性
如果 Z[x(n)]X(z),RxzRx 则有: Z[y(n)]Y(z),Ry z Ry
Z[a(x n)b(y n) ]a(X z)b(Y z), maRxx ,R (y)zmiRn x,R (y)
*即满足均匀性与叠加性; *收敛域为两者重叠部分。
31
[例]已知 x(n)co0 sn)(u(n),求其z变换。
m n
nm
X(z) x(m )zm x(n)zn
圆内为收敛域,
若 n2 0
则不包括z=0点
m n2
nn2
j Im[z]
lim n x ( n ) z n 1
R x2
n
lim n x ( n ) z 1
n
Re[ z ]
1 z lim n x ( n ) R x 2
收敛半径
n
8
证明:Z[x*(n)] x*(n)zn [x(n)(z*)n]*
n
n
[ x(n)(z*)n]*X*(z*),Rxz Rx; n
X(z) k Am
z m1 z pm
26
A mRs e X z (z) zpm X z (z)(zpm ) zpm
k
( z R) x(n) Ampm nu(n)A0(n) m1 k
( z R) x(n) A mpm nu(n1)A 0(n) m 1
27
含有M个一阶 S个高阶极点
解:
cos(0n)u(n)
1 [e j0n e j0n ]u(n) 2
Z[anu(n)]
1 1 az1
,
z
a
Z[e
j u0n (n)]
1
1 e j0
z
1
,
z
e j0
1
Z[e
j0nu(n)]
1
1 e j0
z 1
,
z
e j0
1
因此,Z[cos(0n)u(n)]
11
2
[ 1
e
j0
z
1
1 1 e j0 z1 ],
X(z)A0m M 1zA mpzmjS1zBjzj
Bj (s 1j)!d dss zjj
(zj)s
X(z)
z
zj
部分分式为
另一种形式
X(z)A0m M 1zA m p zmjS 1(zC jzjj)j