2模糊控制的数学基础
智能控制理论及应用复习
智能控制理论及应用第1章绪论■《智能控制》在自动化课程体系中的位置《智能控制》是一门控制理论课程,研究如何运用人工智能的方法来构造控制系统和设计控制器。
与《自动控制原理》和《现代控制原理》一起构成了自动控制课程体系的理论基础。
■《智能控制》在控制理论中的位置《智能控制》是目前控制理论的最高级形式,代表了控制理论的发展趋势,能有效地处理复杂的控制问题。
其相关技术可以推广应用于控制之外的领域:金融、管理、土木、设计等等。
■经典控制和现代控制理论的统称为传统控制,智能控制是人工智能与控制理论交叉的产物,是传统控制理论发展的高级阶段。
智能控制是针对系统的复杂性、非线性和不确定性而提出来的。
■传统控制和智能控制的主要区别:➢传统控制方法在处理复杂化和不确定性问题方面能力很低;智能控制在处理复杂性、不确定性方面能力较高。
智能控制系统的核心任务是控制具有复杂性和不确定性的系统,而控制的最有效途径就是采用仿人智能控制决策。
➢传统控制是基于被控对象精确模型的控制方式;智能控制的核心是基于知识进行智能决策,采用灵活机动的决策方式迫使控制朝着期望的目标逼近。
传统控制和智能控制的统一:智能控制擅长解决非线性、时变等复杂的控制问题,而传统控制适于解决线性、时不变等相对简单的控制问题。
智能控制的许多解决方案是在传统控制方案基础上的改进,因此,智能控制是对传统控制的扩充和发展,传统控制是智能控制的一个组成部分。
■智能控制与传统控制的特点。
传统控制:经典反馈控制和现代理论控制。
它们的主要特征是基于精确的系统数学模型的控制。
适于解决线性、时不变等相对简单的控制问题。
智能控制:以上问题用智能的方法同样可以解决。
智能控制是对传统控制理论的发展,传统控制是智能控制的一个组成部分,在这个意义下,两者可以统一在智能控制的框架下。
■智能控制应用对象的特点(1)不确定性的模型模型未知或知之甚少;模型的结构和参数可能在很大范围内变化。
(2)高度的非线性(3)复杂的任务要求■自动控制的发展过程■智能控制系统的结构一般有哪几部分组成,它们之间存在什么关系?答:智能控制系统的基本结构一般由三个部分组成:人工智能(AI):是一个知识处理系统,具有记忆、学习、信息处理、形式语言、启发式推理等功能。
模糊控制的数学基础-1(2-16至2-30)模糊运算、分解定理
从中可见,随着实验次数n 的增加,27岁对“青年人”的频率基本稳定在0.78附近,近似可取()78.027~=A μ。
②例证法此法是扎德教授于1972年提出的。
基本思想—从模糊子集~A的有()x A ~μ的值,估计出论域U 上~A 的隶属函数。
例如:取论域U 是实数域R 中的一部分[0,100], ~A 是U 上―较大的数‖,虽然~A 是U 上的模糊子集。
为确定()x A ~μ的分布,选定几个语言真值(即一句话为真的程度)中的一个,来回答[0,100]中的某数是否算―较大‖。
如果语言真值分为―真的‖、―大致真的‖、―半真半假‖、―大致假的‖、“假的”。
把这些语言真值分别用[0,1]之间的数字表示,即分别为1,0.75,0.5,0.25和0。
对[0,100]用的αϕ个不同的数都作为样本进行询问,就可得~A 的模糊分布()x A ~μ的离散表示法。
③专家评分法(德尔菲法)该法40年代以来就已广泛应用于经济与管理科学的各个领域,典型的例子是在体操比赛中对运动员的评分,“技术好”是运动员集上的一个模糊 ,所有评委打分的平均值(有时去掉一个最高分和一个最低分)就是运动员“技术好”的隶属度。
这种方法也可以用来求模糊分布,在应用时,为了区别专家的学术水平和经验的多少,还可以采用加权平均法。
§2—2 模糊子集的特性及运算法则前面已讨论过普通集合的基本运算,下面对模糊子集的运算另作定义。
一、 模糊子集的运算法则 ① Fuzzy 子集的包含与相等设~A 、~B 为论域U 上的两个模糊子集,对于U 中的每一个元素x ,都有()x A ~μ≥()x B ~μ,则称~A 包含~B ,记作~A ⊇~B 。
如果,~A ⊇~B 且~B ⊇~A ,则说~A 与~B 相等,记作~A =~B 。
或者,若对所有x ∈U ,都有()x A ~μ=()x B ~μ,则~A =~B 。
②模糊子集的并、交、补运算设~A 、~B 为论域U 上的两个模糊子集,规定~A ~B 、~A ~B 、~A 的隶属函数分别为~~BAμ、~BAμ、~A μ,并且对于U 的每一个元素x 都有~~BAμ()∆x ()x A ~μ∨()x B ~μ=max[()x A ~μ,()x B ~μ] —~A ,~B 的并~~BAμ()∆x ()x A ~μ∧()x B ~μ=min[()x A ~μ,()x B ~μ]— ~A ,~B 的交~Aμ()∆x 1–()x A ~μ —~A 的补eg,设论域U={}4321,,,x x x x ,~A 、~B 是论域U 上的两个模糊集。
模糊控制的数学基础

选择题
模糊控制理论中的核心概念之一是模糊集合,它主要由谁提出?
A. 扎德(Zadeh)(正确答案)
B. 牛顿
C. 莱布尼茨
D. 欧拉
模糊集合论中,用于描述元素属于集合程度的函数是什么?
A. 隶属函数(正确答案)
B. 概率函数
C. 分布函数
D. 密度函数
在模糊逻辑中,处理不确定性和模糊性的基本工具是什么?
A. 模糊规则
B. 模糊推理系统(正确答案)
C. 模糊数
D. 模糊关系
模糊控制中,用于将模糊量转换为精确量的过程称为?
A. 模糊化
B. 清晰化(正确答案)
C. 模糊推理
D. 模糊规则生成
下列哪一项是模糊控制系统中常用的清晰化方法?
A. 最小二乘法
B. 质心法(正确答案)
C. 牛顿法
D. 拉格朗日法
模糊集合的运算中,表示两个模糊集合合并的操作是什么?
A. 模糊交
B. 模糊并(正确答案)
C. 模糊补
D. 模糊蕴含
在模糊逻辑中,用于表示模糊命题之间逻辑关系的运算是什么?
A. 模糊蕴含(正确答案)
B. 模糊加法
C. 模糊减法
D. 模糊乘法
模糊控制器的设计过程中,确定输入输出变量模糊子集及其隶属函数的过程称为?
A. 模糊规则设计
B. 模糊化设计
C. 模糊关系设计
D. 隶属函数设计(正确答案)
模糊控制系统性能的好坏很大程度上取决于什么的设计?
A. 模糊规则库(正确答案)
B. 模糊推理机
C. 模糊化接口
D. 清晰化接口。
模糊控制的数学基础

关系:对于给定集合 X 、 Y 的直积 X Y 上的一个子集 R,
称为 X 到 Y 的二元关系,简称为关系。对于 X Y 的元
素 (x, y),若有 (x, y) R,则称 x 与 y 相关,记为 x R y
否则 (x, y) R ,记为 x R y 。 设 f : X Y ,显然有{(x, y) y f (x)} X Y ,可见
3. 集合(Set)
给定一个论域,其中具有相同属性的确定的可以彼此区别的元素的 全体称为集合。
4. 全集、空集、子集
全集:集合中包含了论域中的全部元素。
空集:不包含论域中任何元素的集合称为空集,记为Ø。
子集(Subset):对于x A x B , 称为A为B的一个子
集,
A B
7
二、集合的表示法 1. 列举法:
A (B C) (A B) (A C)
A (B C) (A B,) (A C)
A (A B) A
A (A B) A
AU U,
A U A
A Ø A , A Ø=Ø
7.复原律
(Ac )c A
12
8.互补律 A Ac U ,
A Ac Ø
9.对偶律
(A B)c Ac Bc (A B)c Ac Bc
4
美国加里福尼亚大学控制论专家扎德 (L.A.Zadeh)教授1965年创立了模糊集合论, 用隶属函数代替经典集合论中的特征函数,隶属 函数在[0, 1]间连续取值,以此来描述模糊现象的 中间过渡性,突破了经典集合论中或不属于的绝 对关系。
5
2.1.2 精确性、模糊性与随机性
确定性——经典数学
不确定性
Ac={x | x Α且x∈U}
4. 集合的直积 设有两个集合A和B,A和B的直积A×B定义为
模糊控制 - 数学基础

一、模糊集合
6、运算性质
F集幂等律: A A=A,A A=A F集两极律:A =,A U=U F集同一律: A U=A,A =A F集交换律: A B=B
A,A B =B A
F集结合律: A B C =A
B
C , A B C =A
4
一、模糊集合
例1 设集合U 由1到5的五个自然数组成,用上述前三 种方法写出该集合的表达式。
解:(1)列举法 U ={1,2,3,4,5} (2)定义法 U ={u|u为自然数 且 1u5 }
(3)归纳法 U ={ui+1 = ui+1, i = 1,2,3,4, u1 = 1}
(4)特征函数表示法:集合U通过特征函数来TU(u)表示 u U 1 TU (u) u U 0
A
其中隶属函数定义为
x, ( x) x U
A
A ( x)
1 1 10 x 2
“接近于0的实数”之模糊集合
12
一、模糊集合
例:拥有离散性论域的模糊集合 假设U ={ 0,1,2,...,9 } 为代表一个家庭中,所可能拥有子女个数的集 合,令三个模糊集合之定义为A:子女数众多,B:子女数适中,C:子 女数很少,其隶属函数的定义如表所示。
子女数 0 1 2 3 4 5 6 7 8 9 子女众多 (A) 0 0 0 0 0 0.1 0.3 0.8 1 1 子女适中 (B) 0 0 0.2 0.7 1 0.7 0.2 0 0 0 子女很少 (C) 1 1 0.8 0.2 0.1 0 0 0 0 0
一、模糊集合
3、模糊集合的表示
当论域U由有限多个元素组成时,模糊集合可用向量表示法或扎德 表示法表示。设 U {x1 , x2 , , xn } { 0,1, 2,..., 9 }
第3章 模糊控制理论的基础讲解
(3)模糊控制易于被人们接受。模糊控 制的核心是控制规则,模糊规则是用语言 来表示的,如“今天气温高,则今天天气 暖和”,易于被一般人所接受。 (4)构造容易。模糊控制规则易于软件 实现。 (5)鲁棒性和适应性好。通过专家经验 设计的模糊规则可以对复杂的对象进行有 效的控制。
第二节 模糊集合
一、模糊集合 模糊集合是模糊控制的数学基础。
c (x) Min A (x), B (x)
② 代数积算子
c (x) A (x) B (x)
③ 有界积算子
c (x) Max0, A (x) B (x) 1
(2)并运算算子 设C=A∪B,有三种模糊算子: ① 模糊并算子
c (x) Max A (x), B (x)
c (x) A (x) B ( x) 1 1 (1 A (x)) (1 B (x))
γ取值为[0,1]。
当γ=0时, c (x) A (x) ,B相(x当) 于A∩B
时的算子。
当γ=1时,c (x) A(x) B (x) A(,x)相.B (x)
(3)等集
两个模糊集A和B,若对所有元素u,
它们的隶属函数相等,则A和B也相等。
即
A B A (u) B (u)
(4)补集 若 A 为A的补集,则
A A (u) 1 A (u)
例如,设A为“成绩好”的模糊集, 某学生 u0 属于“成绩好”的隶属度为:
A (u0 ) 0.8 则u0 属于“成绩差”的隶属度
第三章 模糊控制的理论基础
第一节 概 述 一、 模糊控制的提出
以往的各种传统控制方法均是建立在 被控对象精确数学模型基础上的,然而, 随着系统复杂程度的提高,将难以建立 系统的精确数学模型。
第二章 模糊控制数学基础
第二章模糊控制数学基础模糊控制的应用场合:一.模糊控制的定义对于一个熟练的操作人员,他往往凭借丰富的实践经验,采取适当的对策来巧妙地控制一个复杂过程,得到满意的控制效果。
若能将这些熟练操作员的实践经验加以总结和描述,并用语言表达出来,就会得到一种定性的、不精确的控制规则。
如果用模糊数学将其定量化就转化为模糊控制算法,形成模糊控制理论。
模糊控制是建立在人工经验(定性的、不精确的)基础之上的,模仿人类的思维方式,采用模糊数学对模糊现象进行识别和判决,给出精确的控制量,对被控对象进行控制。
模糊数学是模糊控制的数学基础,二.模糊控制的特点:1.无需知道被控对象的数学模型。
模糊控制是以人对被控系统的控制经验为依据而设计的控制器,故无需知道被控系统的数学模型。
2.是一种反映人类智慧思维的智能控制。
模糊控制采用人类思维中的模糊量,如“高”、“中”、“低”、“大”、“小”等,控制量由模糊推理导出。
这些模糊量和模糊推理是人类智能活动的体现。
3.易被人们所接受。
模糊控制的核心是控制规则。
模糊控制中的知识表示、模糊规则和模糊推理是基于专家知识或熟练操作者的成熟经验。
这些规则是以人类语言表示的。
很明显这些规则易被一般人所接收和理解。
如“衣服较脏,则投入洗涤剂较多,洗涤时间较长”, “今天气温高,则今天天气暖和”.4.构造容易。
用单片机等来构造模糊控制器,其结构与一般的数字控制系统无异,模糊控制算法用软件实现,也可以用专用模糊控制芯片直接构造控制器。
5.鲁棒性好。
模糊控制系统无论被控对象是线性的还是非线性的,都能执行有效的控制,具有良好的鲁棒性和适应性。
模糊控制是基于熟练操作员的实践经验,比如智能洗衣机,能够实现以下功能:“衣服较脏,则投入洗涤剂较多,洗涤时间较长”。
这个控制规律中存在着模糊概念:“衣服较脏”。
三.模糊概念没有明确外延的概念,即没有明确符合某概念的对象的全体,如“天气冷热”、“雨的大小”、“风的强弱”、“人的胖瘦”、“年龄的大小”、“个子高低”。
人工智能控制技术课件:模糊控制
模糊集合
模糊控制是以模糊集合论作为数学基础。经典集合一般指具有某种属性的、确定的、
彼此间可以区别的事物的全体。事物的含义是广泛的,可以是具体元素也可以是抽象
概念。在经典集合论中,一个事物要么属于该集合,要么不属于该集合,两者必居其一,
没有模棱两可的情况。这表明经典集合论所表达概念的内涵和外延都必须是明确的。
1000
1000
9992
9820
的隶属度 1 =
= 1,其余为: 2 =
= 0.9992, 3 =
=
1000
1000
1000
9980
9910
0.982, 4 =
= 0.998, 5 =
= 0.991,整体模糊集可表示为:
1000
1000
1
0.9992
0.982
0.998
《人工智能控制技术》
模糊控制
模糊空基本原理
模糊控制是建立在模糊数学的基础上,模糊数学是研究和处理模糊性现
象的一种数学理论和方法。在生产实践、科学实验以及日常生活中,人
们经常会遇到模糊概念(或现象)。例如,大与小、轻与重、快与慢、动与
静、深与浅、美与丑等都包含着一定的模糊概念。随着科学技术的发展,
度是2 ,依此类推,式中“+”不是常规意义的加号,在模糊集中
一般表示“与”的关系。连续模糊集合的表达式为:A =
)( /其中“” 和“/”符号也不是一般意义的数学符号,
在模糊集中表示“构成”和“隶属”。
模糊集合
假设论域U = {管段1,管段2,管段3,管段4,管段5},传感器采
1+|
模糊控制的理论基础

第二章:模糊控制的理论基础第一节:引言模糊控制的发展传统控制方法:数学模型。
模糊控制逻辑:使计算机具有智能和活性的一种新颖的智能控制方法。
模糊控制以模糊集合论为数学基础。
模糊控制系统的应用对于那些测量数据不准确,要处理的数据量过大以致无法判断它们的兼容性以及一些复杂可变的被控对象等场合是有益的。
模糊控制器的设计依赖于操作者的经验。
模糊控制器参数或控制输出的调整是从过程函数的逻辑模型产生的规则来进行的。
改善模糊控制器性能的有效方法是优化模糊控制规则。
模糊控制的特点:一、无需知道被控对象的数学模型二、是一种反应人类智慧思维的智能控制三、易被人们所接受四、推理过程采用“不精确推理”五、构造容易六、存在的问题:1、要揭示模糊控制器的实质和工作原理,解决稳定性和鲁棒性理论问题,从理论分析和数学推导的角度揭示和证明模糊控制系统的鲁棒性优于传统控制策略;2、信息简单的模糊处理将导致系统的控制精度降低和动态品质变差;3、模糊控制的设计尚缺乏系统性,无法定义控制目标。
“模糊控制的定义”定义:模糊控制器的输出是通过观察过程的状态和一些如何控制过程的规则的推理得到的。
基于三个概念:测量信息的模糊化,推理机制,输出模糊集的精确化;测量信息的模糊化:实测物理量转换为在该语言变量相应论域内的不同语言值的模糊子集;推理机制:使用数据库和规则库,根据当前的系统状态信息决定模糊控制的输出子集;模糊集的精确化:将推理过程得到的模糊控制量转化为一个清晰,确定的输出控制量的过程。
“模糊控制技术的相关技术”模糊控制器的核心处理单元:1.传统单片机;2.模糊单片机处理芯片;3.可编程门阵列芯片。
模糊信息与精确转换技术:AD,DA,转换技术。
模糊控制的软技术:系统的仿真软件。
综述:模糊控制是一种更人性化的方法,用模糊逻辑处理和分析现实世界的问题,其结果往往更符合人的要求。
第二节:模糊集合论基础“模糊集合的概念”经典集合论所表达概念的内涵和外延都必须是明确的。
智能控制技术(第3章-模糊控制的数学基础)

二、模糊控制的特点 模糊控制是建立在人工经验基础之上
的。对于一个熟练的操作人员,他往往凭 借丰富的实践经验,采取适当的对策来巧 妙地控制一个复杂过程。若能将这些熟练 操作员的实践经验加以总结和描述,并用 语言表达出来,就会得到一种定性的、不 精确的控制规则。如果用模糊数学将其定 量化就转化为模糊控制算法,形成模糊控 制理论。
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
0
1
2
3
4
5
6
7
8
9
10
trimf,P=[3 6 8]
图 高斯型隶属函数(M=1)
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
0
1
2
3
4
5
6
7
8
9 10
trimf,P=[2 4 6]
图 广义钟形隶属函数(M=2)
1
0.9
0.8
(7)交集 若C为A和B的交集,则
C=A∩B 一般地,
A B A B (u) min( A (u), B (u)) A (u) B (u)
(8)模糊运算的基本性质 模糊集合除具有上述基本运算性质
外,还具有下表所示的运算性质。
运算法则 1.幂等律 A∪A=A,A∩A=A 2.交换律 A∪B=B∪A,A∩B=B∩A 3.结合律 (A∪B)∪C=A∪(B∪C) (A∩B)∩C=A∩(B∩C)
4.吸收律 A∪(A∩B)=A A∩(A∪B)=A 5.分配律 A∪(B∩C)=(A∪B)∩(A∪C) A∩(B∪C)=(A∩B) ∪(A∩C) 6.复原律
第三章答案

3)求关系矩阵R
4)由A’,B’,求出D’
5)仿照2),将D’化为列矢量DT’
6)最后求出模糊推理输出
即
不做
2-1设语言变量速度V、误差W、控制电压U的论域分别为【0,200】、【-30,30】、【0,10】。假设各语言变量的离散论域是由相应连续论域十等分后构成。要求根据常规经验法确定在连续域、离散域下速度大、误差为零、控制电压较大这三个语言值的隶属度函数。
把例题方程分解为
2)按照书上公式(2-63)
把例题方程分解为
3)由 解得到
因此根据
得到
其中x2表示0.2到1范围内。
4)由 解得到
式中,[r]表示等式方程的解;(r)表示不等式方程的解
因此根据
得到
因此,此模糊方程的部分解分别为
所以
(2)求 的解
1)、按照书上公式(2-62)
把例题方程分解为
2)按照书上公式(2-63)
上确界(Sup)算子
(1)
(2)
2-5(仿例题2-12)考虑如下逻辑条件语句
如果转角误差远远大于15。 那么 快速减少方向角 其隶属度函数定义为
问:当A’=转角误差大约在20。时方向角应该怎样变化?
设 。(用玛达尼推理法计算)
解
用玛达尼推理法计算
且
由
2-7求解模糊关系方程
的解
解:
(1)、求 的解
1)、按照书上公式(2-62)
第二章模糊控制的理论基础(学时8)
模糊控制的理论基础
重点:模糊集数学理论
1、与模糊控制有关的模糊集理论
2、隶属度函数
3、模糊语言变量
4、模糊逻辑推理
2-1、2-6不做,2-2
模糊控制技术第2章模糊逻辑的数学基础
第2章 模糊逻辑的数学基础 例2.1 在论域U={1,2,3,4,5,6,7,8,9,10}中
讨论“小的数”F这一模糊概念,分别写出上述三种模糊集 合的表达式。
概念的外延,一个概念所包含的那些区别于其他概念的全体 本质属性就是这概念的内涵。用集合论的观点来看,内涵是 集合的定义,外延就是组成集合的所有元素。一个概念的外 延就是一个集合。
集合中的个体称为元素,通常用小写字母u、v表示; 集 合的全体又称为论域,通常用大写字母U、V表示; u∈U, 表示元素u在集合论域U内。一个集合如果由有限个元素 组成,则称为有限集合,不是有限集合的集合称为无限集合。 集合可以是连续的,也可以是离散的。
第2章 模糊逻辑的数学基础
定义2.2 支集(Support):模糊集合的支集是一个普
通集合,它是由论域U中满足μF(u)>0的所有u组成的,即
S={u∈U|μF(u)>0}
(2.3)
例如,在图2.1中,模糊集合B(“中年”)的支集是开
区间(35,60)。
定义2.3 模糊单点(Singleton): 如果模糊集合F的支
第2章 模糊逻辑的数学基础
在普通集合中,任何一个元素或个体与任何一个集合之 间的关系只有“属于”和“不属于”两种情况,两者必居其 一,而且只居其一,绝对不允许模棱两可。例如,“大于100 的自 然数”是一个清晰的概念,该概念的内涵和外延均是明确的。
1. 经典集合定义 依据一定的标准进行分类,可以把不同的事物归于这一 类,或不归于这一类。 集合是具有某种特定属性的对象的全体。
模糊控制_精品文档

模糊控制摘要:模糊控制是一种针对非线性系统的控制方法,通过使用模糊集合和模糊逻辑对系统进行建模和控制。
本文将介绍模糊控制的基本原理、应用领域以及设计步骤。
通过深入了解模糊控制,读者可以更好地理解和应用这一控制方法。
1. 导言在传统的控制理论中,线性系统是最常见和最容易处理的一类系统。
然而,许多实际系统都是非线性的,对于这些系统,传统的控制方法往往无法取得良好的效果。
模糊控制方法由于其对于非线性系统的适应性,广泛用于工业控制、机器人控制、汽车控制等领域。
2. 模糊控制的基本原理模糊控制的基本原理是建立模糊集合和模糊逻辑,通过模糊化输入和输出,进行模糊推理和解模糊处理,完成对非线性系统的控制。
模糊集合是实数域上的一种扩展,它允许元素具有模糊隶属度,即一个元素可以属于多个集合。
模糊逻辑则描述了这些模糊集合之间的关系,通过模糊逻辑运算,可以从模糊输入推导出模糊输出。
3. 模糊控制的应用领域模糊控制方法在许多领域中都有着广泛的应用。
其中最常见的应用领域之一是工业控制。
由于工业系统往往具有非线性和复杂性,传统的控制方法往往无法满足要求,而模糊控制方法能够灵活地处理这些问题,提高系统的控制性能。
另外,模糊控制方法还广泛应用于机器人控制、汽车控制、航空控制等领域。
4. 模糊控制的设计步骤模糊控制的设计步骤一般包括五个阶段:模糊化、建立模糊规则、进行模糊推理、解模糊处理和性能评估。
首先,需要将输入和输出模糊化,即将实际的输入输出转换成模糊集合。
然后,根据经验和知识,建立模糊规则库,描述输入与输出之间的关系。
接下来,进行模糊推理,根据输入和模糊规则,通过模糊逻辑运算得到模糊的输出。
然后,对模糊输出进行解模糊处理,得到实际的控制量。
最后,需要对控制系统的性能进行评估,以便进行调整和优化。
5. 模糊控制的优缺点模糊控制方法具有一定的优点和缺点。
其优点包括:对于非线性、时变和不确定系统具有较好的适应性;模糊规则的建立比较直观和简单,无需精确的数学模型;能够考虑因素的模糊性和不确定性。
模糊控制介绍
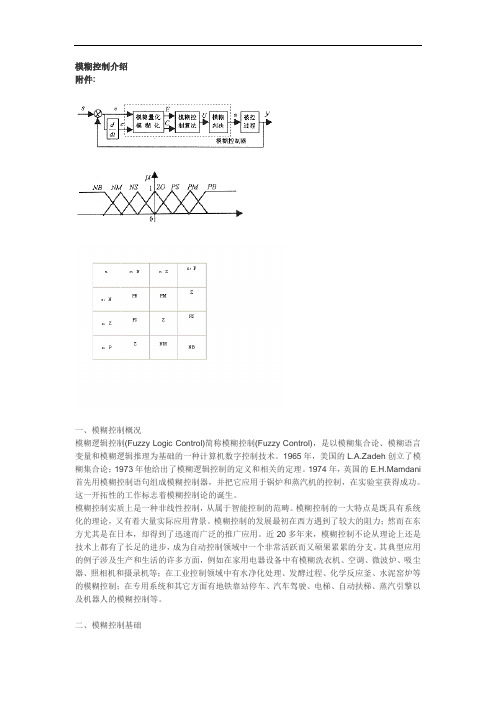
模糊控制介绍附件:一、模糊控制概况模糊逻辑控制(Fuzzy Logic Control)简称模糊控制(Fuzzy Control),是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术。
1965年,美国的L.A.Zadeh创立了模糊集合论;1973年他给出了模糊逻辑控制的定义和相关的定理。
1974年,英国的E.H.Mamdani 首先用模糊控制语句组成模糊控制器,并把它应用于锅炉和蒸汽机的控制,在实验室获得成功。
这一开拓性的工作标志着模糊控制论的诞生。
模糊控制实质上是一种非线性控制,从属于智能控制的范畴。
模糊控制的一大特点是既具有系统化的理论,又有着大量实际应用背景。
模糊控制的发展最初在西方遇到了较大的阻力;然而在东方尤其是在日本,却得到了迅速而广泛的推广应用。
近20多年来,模糊控制不论从理论上还是技术上都有了长足的进步,成为自动控制领域中一个非常活跃而又硕果累累的分支。
其典型应用的例子涉及生产和生活的许多方面,例如在家用电器设备中有模糊洗衣机、空调、微波炉、吸尘器、照相机和摄录机等;在工业控制领域中有水净化处理、发酵过程、化学反应釜、水泥窑炉等的模糊控制;在专用系统和其它方面有地铁靠站停车、汽车驾驶、电梯、自动扶梯、蒸汽引擎以及机器人的模糊控制等。
二、模糊控制基础模糊控制的基本思想是利用计算机来实现人的控制经验,而这些经验多是用语言表达的具有相当模糊性的控制规则。
模糊控制器(Fuzzy Controller,即FC)获得巨大成功的主要原因在于它具有如下一些突出特点:模糊控制是一种基于规则的控制。
它直接采用语言型控制规则,出发点是现场操作人员的控制经验或相关专家的知识,在设计中不需要建立被控对象的精确数学模型,因而使得控制机理和策略易于接受与理解,设计简单,便于应用。
由工业过程的定性认识出发,比较容易建立语言控制规则,因而模糊控制对那些数学模型难以获取、动态特性不易掌握或变化非常显著的对象非常适用。
最新神经网络与模糊控制考试题及答案

一、填空题1、模糊控制器由_模糊化接口、解模糊接口 _________ 、—知识库 ________ 和—模糊推理机组成2、一个单神经元的输入是 1.0,其权值是1.5,阀值是-2,则其激活函数的净输入是-0.5 ____ ,当激活函数是阶跃函数,则神经元的输出是_______________ 1 ____3、神经网络的学习方式有_________ 导师监督学习 ______________ 、—无导师监督学习_____________和_灌输式学习___________4、清晰化化的方法有三种:—平均最大隶属度法 _________________ 、—最大隶属度取最小_/最大值法_______________ 和_中位数法,加权平均法 ____________________5、模糊控制规则的建立有多种方法,是:____ 基于专家经验和控制知识__________________ 、基于操作人员的实际控制过程____________ 和_基于过程的模糊模型,基于学习_________________________ 6、神经网络控制的结构归结为_______ 神经网络监督控制 ___________ 、—神经网络直接逆动态控—制__________ 、—神网自适应控制 ________________ 、神网自适应评判控制_______ 、神网内模控制、神网预测控制____ 六类7•傅京逊首次提出智能控制的概念,并归纳出的3种类型智能控制系统是___________________ __________ 、_________________________________ 和______________________________________ 。
7、人作为控制器的控制系统、人机结合作为控制器的控制系统、无人参与的自主控制系统8、智能控制主要解决传统控制难以解决的复杂系统的控制问题,其研究的对象具备的3个特点为__________________ 、 ___________________________ 和_____________________________ 。
计算机控制技术第9章 模糊gai

则称C是A与B的交集,记作 C A B (6) 补集 x X ,都有 B ( x) 1 A ( x) 则称B是A的补集,记作 B A
(7) 直积 x X , y Y
若有两个模糊集合A和B,其论域分别为X
和Y,则称定义在积空间X×Y上的模糊集合
A×B为A和B的直积,其隶属度函数
(4) 并集 x X ,都有 C ( x) max[ A ( x), B ( x)] A ( x) B ( x) 则称C是A与B的并集,记作 C A B
(5) 交集 x X,都有
C ( x) min[ A ( x), B ( x)] A ( x) B ( x)
0.3 0.7 1 1 0.7 0.3 A 3 4 5 6 7 8
当U为无限连续域时,Zadeh给出如下记
法:
A
A ( x)
x
U
同样, A ( x) / x 不表示分数,而表示论域
上的元素与隶属度之间的对应关系;“ 表示论域U上的元素x与其隶属度 A ( x) ”
矩阵称为模糊矩阵,其元素均为隶属度函数。
例9-3
设某地区
人的身高论域X={140,
150,160,170,180}, 体重论域Y={40,50, 60,70,80} ,表6-1 为身高与体重的相互
表6-1 某地区人的身高与体重的相互关系
关系,它是从X到Y上
的一个模糊关系R。
用模糊矩阵表示上述模糊关系R时,可写为
(5) 幂等律 (6) 同一律
A A A
A X X
A A
A A A
A X A
A
其中X表示论域全集,φ表示空集。 (7) 达摩根律 ( A B) A B A B (A B)
模糊控制数学基础2—模糊逻辑与推理(2)

F F
隐含隶属函数表达式 pq ( x, y) 1 pq ( x, y) 1 min[ p ( x), (1 q ( y))] 或
pq ( x, y) pq ( x, y) max[ p ( x), q ( y)]
max[( p ( x)), q ( y)] 1
x y
(1 2 ) c ( z )
3) 多前提多规则
前提(事实) 1 前提 2 (规则1 ) 前提 (规则2 3 ) 结果(结论) x是A, y是B if x 是A1和 y是B1 , then Z是C1 if x 是A2和 y是B2 , then Z是C2 z是C
称为工程隐含
工程隐含
• (1) A B 解释为A与B相关,常用的两种三角范 式算子得到模糊关系 Rm A B A ( x) B ( y ) /( x, y )
X Y
或
A B ( x, y ) min{ A ( x), B ( y )}
Rp A B 或
p q,
“if then”
4) 逆操作 Inversion
5) q”。
~p 等效关系 Equivalence p q ,“p即
一个隐含是“真”,必须满足三个条件之一: 1) 前提是真,结论是真; 在教书,是教师;成立
2) 前提是假,结论是假;不教书,不是教师;成立
3) 前提是假,结论是真。
1单点模糊化max乘积复合运算乘积推理高度去模糊化2单点模糊化maxmin复合运算乘积推理高度去模糊化3非单点模糊化max乘积复合运算乘积推理高度去模糊化去下标上面几式可简化为单点模糊化
模糊逻辑与模糊推理
• 对模糊现象的机理进行分析、抽象,进 而用用模糊数学表达
模糊数学的基础知识
模糊数学知识小结与模糊数学相关的问题模糊聚类分析—根据研究对象本身的属性构造模糊矩阵,在此基础上根据一定的隶属度来确定其分类关系模糊层次分析法—两两比较指标的确定模糊综合评判—综合评判就是对受到多个因素制约的事物或对象作出一个总的评价,如产品质量评定、科技成果鉴定、某种作物种植适应性的评价等,都属于综合评判问题。
由于从多方面对事物进行评价难免带有模糊性和主观性,采用模糊数学的方法进行综合评判将使结果尽量客观从而取得更好的实际效果模糊数学基础一.Fuzzy 数学诞生的背景1)一个古希腊问题:“多少粒种子算作一堆?”2)Fuzzy 概念的广泛存在性,如“找人问题”3)何谓Fuzzy 概念?,如何描述它?由集合论的要求,一个对象x,对于一个集合,要么属于A,要么不属于A,二者必居其一,且仅居其一,绝对不允许模棱两可。
这种绝对的方法,是不能处理所有科学的问题,即现实生活中的一切事物一切现象都进行绝对的精确化时行不通的,从而产生模糊概念。
二.模糊与精确的关系对立统一,相互依存,可互相转化。
- 精确的概念可表达模糊的意思:如“望庐山瀑布”“飞流直下三千尺,凝是银河落九天”- Fuzzy的概念也能表达精确的意思:模糊数学不是让数学变成模模糊糊的东西,而是让数学进入模糊现象这个禁区,即用精确的数学方法去研究处理模糊现象。
三. 模糊性与随机性的区别事物分确定性现象与非确定性现象- 确定性现象:指在一定条件下一定会发生的现象。
- 非确定性现象分随机现象与模糊现象* 随机性是对事件的发生而言,其事件本身有着明确的含义,只是由于发生的条件不充分,事件的发生与否有多种可能性。
* 模糊性是研究处理模糊现象的,它所要处理的事件本身是模糊的。
模糊数学的广泛应用性模糊技术是21世纪的核心技术模糊数学的应用几乎渗透到自然科学与社会科学的所有领域:1)软科学方面:投资决策、企业效益评估、经济宏观调控等。
2)地震科学方面:地震预报、地震危害分析。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
分解定理
设A是论域X上的模糊集合,λ∈[0, 1],A是A的λ截集,则有
A A 0, 1 其中λAλ为x的一个特殊模糊集合,其隶属函数为
, A (x) 0,
x A x A
说明任何一个模糊集可由 一个普通集合簇来表示
Page 30
2.3 模糊集合与普通集合的联系
分解定理 为了对分解定理有一个直观的了解,在左图中,取λ1、 λ2∈[0,1]两个值
集合的直积 序偶 将不同的事物按一定顺序排列起来组成一个整体, 用以表达它们之间的关系,这就叫做序偶。 集合的直积 有两个集合X,Y,从X中取一个元素x,从Y中取一个元 素y,把它们组成一个序偶,所有元素序偶的全体组成一 个新的集合,这个集合叫做集合X,Y 的直积,表示为
X Y {(x, y) | x X , y Y}
A {x | x X , A (x) }
称 A为A的λ强截集
当λ=1时,得到的最小的水平截集A1称为模糊集合A的核。 当λ=0+时,得到的最大的水平截集称为模糊集合A的支集。 如果A的核A1非空,则称A为正规模糊集,否则称为非正规 模糊集。
Page 27
2.3 模糊集合与普通集合的联系
λ水平截集
0
25 50 75 100
u
Page 20
2.2 模糊集合
例2.2.3
“年轻”和“年老”模糊集合可以写为:
Y
1
1
(
x
25) 5
2
1
x 0x25
25x200
x
O
0
1
(
x
5 50
)
2
1
x 0x50
50x200
x
Page 21
2.2 模糊集合
模糊集合的运算
设A,B为X中的两个模糊集合,隶属函数分别为μA和μB,则
0 0
20
40
60
80
100
120
X Years
“年轻”的隶属函数曲线
Page 16
2.2 模糊集合
模糊集合的表示法
有限离散论域
Zadeh表示法
论域为有限集,即 X {x1, x2 , xn} 时,X上的模糊集可以表示为
隶属度为零的项可以不写。
A A (x1 ) A (x2 ) A (xn )
2.2 模糊集合
模糊集合的运算性质
交换律 结合律 分配律
传递律
A B B A, A B B A A(B C) (A B) C, A (B C) (A B) C
A(B C) (A B) (AC) A (B C) (A B) (A C)
A B ,B C ,则 A C
注:由于序偶和顺序有关,所以 A B B A
Page 13
2.2 模糊集合
模糊集合的定义
论域
给定论域X,X到[0, 1]闭区间的任一映射μA
模糊集合 两要素
A : X [0, 1] x A (x)
隶属函数
都确定X上的一个模糊子集A,简称模糊集。对于x∈X,μA称为 模糊集合A的隶属函数,μA(x)称为x对于A的隶属度。
特征函数的值域是{0,1},它表示元素x是否属于集 合A。如果x属于集合A,那么它的值为1;如果x不 属于集合A,那么它的值为0。
Page 11
2.2 模糊集合
集合的运算 集合的交
PX Y
集合的并
Q X Y
集合的补
X {x | x X}
Page 12
X
Y
P
X
Y
Q
Y
X
X
2.2 模糊集合
模糊集交 C A B C (x) A (x) B (x)
模糊集并 D A B D (x) A (x) B (x)
模糊集补 A
_ (x) 1 A (x)
A
相等
若 x X ,总有A (x) B (x)成立,则称 A和 B 相等,记作 A B
包含
若 x X,总有A (x) B (x)成立,则称 A包含 B ,记作 A B
1 2 3 4 5 6 7 8 9 10
简化为:
A 1 0.9 0.7 0.5 0.3 0.1 12 3 4 5 6
序偶表示法:
A {(1, 1),(2, 0.9),(3, 0.7),(4, 0.5),(5, 0.3),(6, 0.1)}
向量表示法:
A (1, 0.9, 0.7, 0.5, 0.3, 0.1, 0, 0, 0, 0)
Page 22
2.2 模糊集合
模糊集合的运算
Page 23
2.2 模糊集合
例2.2.4
设论域X={a, b, c, d, e}上有两个模糊集分别为:
A 0.5 0.3 0.4 0.2 0.1 abcde
求 A B,A B ,A
B 0.2 0.8 0.1 0.7 0.4 abcd e
核
截集
支集
Page 28
2.3 模糊集合与普通集合的联系
水平截集的性质 A∪B的λ水平截集是Aλ和Bλ的并集:
( A B) A B
A∩B的λ水平截集是Aλ和Bλ的交集:
( A B) A B
如果λ∈[0,1],α∈[0,1],且λ≤α ,则
A A
Page 29
2.3 模糊集合与普通集合的联系
Page 18
2.2 模糊集合
模糊集合的表示法 连续论域 Zadeh表示法:
A A (x) x X 之Ax间(x) 不的是对表应示关“系分;数 既”不,表而示表“示积论分域”上也的不元是素“x与求隶和属”度记号A,(x) 而是表示论域X上的元素x与隶属度 A (x)对应关系的一个总括。
Page 19ab来自cde
abcd e
A 1 0.5 1 0.3 1 0.4 1 0.2 1 0.1 0.5 0.7 0.6 0.8 0.9 a b c d e abcde
Page 24
2.2 模糊集合
模糊集合的运算
设A,B为X中的两个模糊集合,隶属函数分别为μA和μB,则
代数积 代数和 有界和 有界差 有界积
隶属函数μA(x)是x属于集合A的程度的数量指标,μA(x)的值越大, 表示x从属于A的程度越高,反之越低,当μA(x)仅取0,1二值时, A便成为普通集合,隶属函数就成为普通集合的特征函数。
Page 14
2.2 模糊集合
例2.2.1
以年龄为论域,取 X 0, 200 ,Zadeh给出了“年轻”
A
B 0.5 0.2 0.3 0.8 0.4 0.1 0.2 0.7 0.1 0.4
a
b
c
d
e
0.2 0.3 0.1 0.2 0.1 abcde
A B 0.5 0.2 0.3 0.8 0.4 0.1 0.2 0.7 0.1 0.4 0.5 0.8 0.4 0.7 0.4
幂等律 摩根律
A A A, A A A
AB A
B,
A B AB
注:互补律不再成立,即 A A X A A
Page 26
2.3 模糊集合与普通集合的联系
λ水平截集 在论域X中,给定一个模糊集合A,任取λ∈[0, 1],记
A {x | x X , A (x) } 称 A为A的水平截集,其中λ称为阈值或置信水平。又记
Page 3
2.1 概述
模糊概念大量存在于人的观念之中: 没有明确外延的概念 概念本身具有开放性 概念的外延就是适合这个概念的一切对象的范围, 概念的内涵就是这个概念所反映的对象的本质属 性的总和
Page 4
2.1 概述
模糊概念
天气冷热
雨的大小
风的强弱
人的胖瘦
年龄大小
Page 5
个子高低
2.1 概述
2.2 模糊集合
例2.2.3
以年龄为论域,取 X 0, 200,用模糊集Y表示“年
轻”,用O表示“年老”。隶属函数分别为定义为
1
1
Y
(
x)
1
(
x
25)2
5
μ
1
0 x 25 25 x 200
μY(x)
0
1
O (x)
1 (
5
)2
x 50
0 x 50 50 x 200
μO(x)
Page 17
2.2 模糊集合
例2.2.2
设X={1, 2, 3, 4, 5, 6, 7, 8, 9, 10},以A表示“小的数”,分别写出 上述三种模糊集合的表达方式。 解:根据经验,“小的数”这一模糊概念,可以定量地给出其隶 属函数
Zadeh表示法: A 1 0.9 0.7 0.5 0.3 0.1 0 0 0 0
Page 7
2.1 概述
模糊性与随机性 概率论处理随机事件: 事件发生与否不确定,但事件本身有明确定义, 即发生不发生的界限明确。 模糊集合处理模糊事件: 事件本身模糊,出现不出现没有明确的分界线 事件本身有确切定义,发生与不发生的界限明确, 但事件发生的概率难于用精确的数值表示
Page 8
对于两个集合A和B,如果A B 和 B A 同时成立,则称A和B相等,记做 A=B。 *有限集 如果一个集合包含的元素为有限 个,就叫做有限集;否则叫做无 限集。
Page 9
2.2 模糊集合
集合的表示法 例举法 将集合中的所有元素都列在大括号中表示出来,该 方法只能用于有限集的表示。
例如10-20之间的偶数组成集合A,则A可表示为 A={10,12,14,16,18,20}
A• B A B
AB
AB AB
A•B (x) A (x) B (x) AB (x) A (x) B (x) A (x) B (x)