一种相机标定参数的柱面全景影像拼接方法
一种快速的柱面全景图像拼接算法

一种快速的柱面全景图像拼接算法
华顺刚;曾令宜;欧宗瑛
【期刊名称】《数据采集与处理》
【年(卷),期】2006(21)4
【摘要】基于等距离匹配思想,提出一种快速的柱面全景图像拼接算法.对于相邻两幅待匹配图像,设定相同大小的比较区域,从两幅图像中心垂线开始向重叠方向同步长移动并进行比较.在比较区域中采取随机取点的方式,计算对应点的颜色差值并累加,若达到某一设定阈值,则停止计算,移动比较过程中,计算次数最多的比较区域中心位置即为最佳匹配位置.该算法可以尽早排除非匹配位置,减少计算量,提高全景图像生成速度.利用该算法思想对随机顺序输入的场景图像序列进行排序,可以获得按照实际场景内容排列的图像序列,然后进行全景图像匹配拼接.实验结果表明该算法快速有效.
【总页数】5页(P434-438)
【作者】华顺刚;曾令宜;欧宗瑛
【作者单位】大连理工大学精密与特种加工教育部重点实验室,大连,116024;黄河水利职业技术学院,开封,475001;大连理工大学精密与特种加工教育部重点实验室,大连,116024
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于圆柱面映射的快速图像拼接算法 [J], 任刚;彭冬亮;谷雨
2.一种360度柱面全景图快速生成算法 [J], 潘立公;汤晓安;郝建新;蔡宣平
3.一种基于柱面投影的图像拼接算法研究 [J], 吴子章
4.一种快速的柱面全景图像拼接算法 [J], 安然;张秀林;刘玉
5.一种改进的快速全景图像拼接算法 [J], 常伟;刘云
因版权原因,仅展示原文概要,查看原文内容请购买。
一种快速的柱面全景图像拼接算法
Ab ta t a e n e uds a tmac ig,afs l o ih f rc l d ia a o a c i a emo sr c :B s d o q iit n th n a tag rt m o yi rc lp n r mi m g — n s i i r p s d ac sp o o e .Fisl rt y,t er go sO h a e sz r h s n frc mp rs n o woo e— h e in ft es m iea ec o e o o a io n t v r
文 章 铺 号 t0 49 3 (0 60 —4 40 0 0 7 2 0 ) 40 3 —5 1
一
种快 速的柱 面全 景 图像 拼接算法
华顺 刚 曾令 宜。 欧宗瑛
(. 连 理 工 大 学 精 密 与 特 种 加 工 教 育 部 重 点 实 验 室 , 连 ,1 0 4 I大 大 1 62 ;
图像匹配拼接 实验 结果表 明谊算法快速有效 。
关键词: 于图像的绘制 ; 面全景 图; 基 柱 图像拼接 ; 等距 离匹配 中田分类号; 3 1 TP 9 文献标识码 : A
F s g rt m o l d ia n r mi ma e M o a c a tAl o ih f r Cy i rc lPa o a c I g n s i
维普资讯
第2 卷第4 l 期
20 年 1 月 06 2
数
据 采 集 Fra bibliotek与 处
理
Vo . 1 No 4 1 2 . De .2 0 c 0 6
J u n lo t q iio o r a fDa aAc ust n& Prc s ig i o e sn
全景图像拼接算法
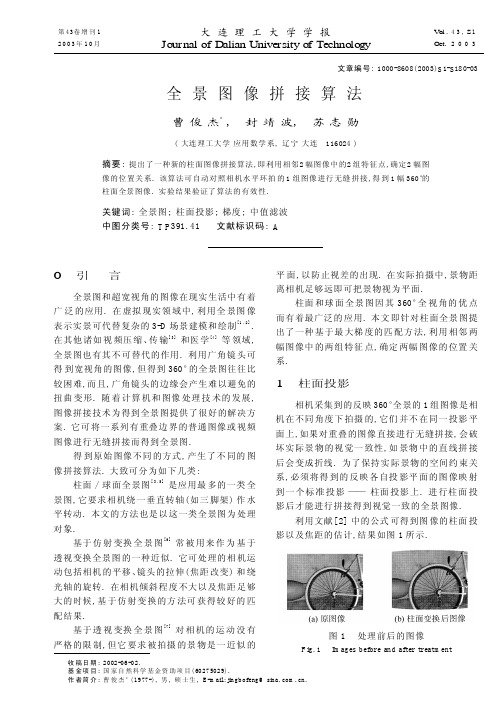
图1 处理前后的图像F i g.1 I m ages bef ore and af ter t reatm ent .图2 特征点的分布情况F i g.2 L ayout of feature poi nt s2.3 匹配策略由于2幅图像的重叠部分一般不超过50%,为减小计算量,只在左图像的右半部分和右图像的左半部分中进行计算,下面来确定全局最小方差的两段子数组.这两段的起始位置,也就是两幅图像的最佳匹配点.在代表左、右图像的两个数组中分别取一固定长度L 的子数组,记为S l 和S r .L 的选取可视图像的宽度而定,一般L 取为图像宽度的1/10左右会得到较好的效果.S l 和S r 的相似程度Simil (S l ,S r )由S l -S r 的方差来描述,即Sim il (S l ,S r )=SE (S l -S r )其中方差SE (S l -S r )=∑Li =1[(S l[i ]-S r [i ])-me an ]2,me an =∑Li =1(S l[i ]-S r [i ])/L .Simil (S l ,S r )越小,说明S l 和S r 越相似.那么,必然可以找到这样的S 0l 和S 0r ,使得Simil (S 0l ,S 0r )=m i n S l ⊂Mag l S r ⊂Mag r{Sim il (S l ,S r )}2幅图像的最佳匹配位置就是S 0l 和S 0r 的起始位置.由于Mag l 和M ag r 的元素值是按列梯度最大点的纵坐标取值,在确定了列的匹配位置时,也同时确定了行的匹配位置.这样就可找到最佳的匹配位置.2幅图像拼接的结果如图3所示,图图3 两幅照片拼接结果F i g.3 M osai c i m age const ruct ed f rom tw o i m ages图4 多幅照片的拼接结果F i g.4 P anoram a constructed f rom a col l ecti on ofi m ages参考文献:[1]SZE L ISK I R,SH U M H.C reati ng f ul l vi ewpanoram i c i m age m osai cs and envi ronm ent m aps[A].Proc ee ding s of S IGG RA PH[C].L osA ngel es:[s n],1997.251-258.[2]孙立峰,钟立,李云浩,等.虚拟实景空间的实时漫游[J].中国图象图形学报,1999,4A(6):507-513.[3]C H E N S E.Q ui ckti m e V R—an i m age-basedapproach t o vi rt ual envi ronm ent navi gati on[A].Proce edings of A CM C om p uter G raphic s (SIG G RA PH′95)[C].L os A ngel es:[s n],1995.29-38.[4]C A N A,ST E W A R T C V,R O Y SA M B.R obusthi erarchi cal al gori thm f or constructi ng a m osai cf rom i m ages of the curved hum an reti na[A].Proce edings o f the IEEE Conferenc e o n C om puterV ision and Patte rn Re cog nition[C].C ol orado:[s n],1999.286-292.[5]M C M IL L A N L,B I S H O P G.Pl enopt i c m odel i ng:A pano ram ic im agC A O Ju n-jie*, F E N(D ept.of A pp l.M ath.,Dalian U n Ab stract:A new m osai c al gori thm i s proposed,w i m ages to det erm i ne t he of f set of one i m age to anot seam l essl y st i tch a set of i m ages aut om at i cal l y,Ke y wo rds:panoram a;cyl i ndri cal proj ecti on;m。
一种快速的柱面全景图像拼接算法

引 言
图像 拼接 技 术 是把 若 干有 重 叠部 分 的图像 拼 成
一
ቤተ መጻሕፍቲ ባይዱ
要 点 。拼接 算 法 的设计 思 想 是在 配 准精 度 高 的前 提
幅无缝且清晰度高的图像 。通常参与拼接的图像
下确保计算量不宜过大。 基 于特 征点 匹配 的 图像 拼接 算 法 主要 由特征 点 检测 、 特 征点 匹配 、 空 间变 换 3个 模 块 构 成 。如 图 1
s e ns i ng t e c h n o l o y g ie f l d a n d i n t h e mi l i t a r y ie f l d .I n t h i s p a p e r ,b a s e d o n i ma g e f e a t u r e p o i n t ma t c hi ng c y l i n d r i c a l pa n o r a mi c i ma g e s t i t c h i n g a l g o it r hm ,e x p e ime r n t s s h o w t h a t t h e a l g o r i t hm ha s h i g h ma t c hi ng a c c u r a c y, r o b u s t n e s s ,a n d o t h e r c h a r a c t e r i s t i c s ,c a n b e q u i c k l y a n d e ic f i e n t l y g e n e r a t e c y l i n d r i c a l p a n o r a mi c i ma g e s wi t h h i g h pr a c t i c a l v a l u e . Ke y wo r ds:c y l i n d r i c a l p a n o r a mi c i ma g e, i ma g e r e g i s t r a t i o n, i ma g e mo s a i c s
柱面全景图单点投影及配准拼接算法

触影
图像 统一 投影到 同一坐 标系上 , 如在 构造柱 面全景 图时
即投影 到柱面上 , 种变 换使得 现实 世界里 的相 同景物 这 在 不 同的局部 图像 中也是 相 同的 。在得 到投 影 图像 后 , 再 进行 无 缝拼 接就 能 得到 视 觉一 致 的全 景 图像 。 柱面 正投影算法 【2是将 多幅待拼 图像投 影到一个 1J J 【 柱 面上 , 以柱 面全 景 图像 的形 式存储 。反 投影 是将柱 面
柱面全最 函
’
3 柱 面 全 景 图像 的投 影 方式
由于 采 集 到 的一 组 图像 是 相 机在 不 同角度 下拍 摄 的 , 们并 不在 同一 投影 面上 , 影平 面之 间存 在一 定 它 投 的夹 角 , 果对 重叠 的 图像 直 接进 行拼 接 , 会破坏 实 如 将 际景物 中各对象 间 的视 觉一 致性 , 景物 中的直 线拼 接 如 后会变成 折线 。为 了保 持 实际景 物的空 间约束 关系 , 在 拼 接全景 图像之 前 , 必须将 得 到的反 映各 自投影 平面 的
综合上述推导 , 柱面上的坐标 ( y) , 与平面上的
坐 标( , 的关系为 : X Y)
A
=a cg x/ ) rt( r
X= , ’ . ×
Y = Y×C S O
() 1
() 2
() 3
() 俯视 图 a
() 投影关 系 b
() 局 部放 大图 c
公 式( ) ( ) i ~ 3 统称 为正投 影公 式 , 果从 ( ,, 出 如 ))
发 , 由( )() 出 f 可 1 3导 反投 影公式 :
图1
柱面 全 景 图与数 码相 片 的投影 关 系
柱面全景视频拼接算法
Image & Multimedia Technology •图像与多媒体技术Electronic Technology & Software Engineering 电子技术与软件工程• 75【关键词】柱面投影 全景视频 视频拼接视频拼接技术将多路具有重叠区域的小视野视频拼接为一路完整大视野场景,有效地解决了单个摄像头视野局限性的问题,在虚拟现实、智能监控等领域有着广泛的应用。
视频图像是由每秒若干帧的静态图像组成的,所以视频拼接的本质是图像拼接,而图像配准又是图像拼接最核心的一步,通常使用的方法是基于图像特征的配准。
David G.Lowe 提出的尺度不变特征算子SIFT[1,2]在图像拼接中被经常使用,但是SIFT 算法的计算速度较慢,无法满足视频实时性的要求,不适合应用于实时视频的拼接。
文献[3]在SIFT 算法基础上,提出了一种改进的尺度不变特征—SURF( Speeded Up Robust Features)。
文献[4]研究表明:SURF 算法提高了特征检测的速度,同时与SIFT 算法性能基本相同。
但是视频拼接与图像拼接又有着很大的不同,最大的不同是视频拼接需要有良好的实时性。
文献[5]和[6]虽然对SURF 算法进行了改进,但是拼接速度仍然达不到实时性的要求。
因此,SURF 虽然速度较快,但是为了能将其应用在实时视频拼接中仍需要改进,文中采用一种改进的SURF 算法来进行图像配准。
文中采用的视频拼接流程是:实时地采柱面全景视频拼接算法文/李晓禹1 陈杰2集视频图像帧,以30帧/s 的速率提取视频帧,提取模板帧,对模板帧多路视频图像利用改进的SURF 进行配准以确定变换矩阵,利用这个变换矩阵对后续的每一帧图像进行融合,形成一个大视角的图像,最后将这些图像以视频的形式输出。
1 柱面图像全景拼接算法图像拼接算法在图像正畸之后的下一个步骤是图像配准。
图像配准是为了使图像间相互重叠部分对齐,将待拼接图像转换到参考图像的坐标系,构成完整的图像,它是整个图像拼接中的核心部分。
柱面全景图像自动拼接算法
柱面全景图像自动拼接算法
杨艳伟;郭宝龙
【期刊名称】《计算机工程与应用》
【年(卷),期】2009(045)009
【摘要】提出了一种基于特征点匹配的柱面全景图像拼接算法.首先将360°环绕拍摄的序列图像投影到柱面坐标系下;然后提取各图像的SIFT(Scale Invariant Feature Transform,尺度不变特征变换)特征点,通过特征点匹配完成两幅图像的配准;再根据配准结果计算出图像间的变换参数;最后采用加权平均的融合方法对两幅图像进行无缝拼接.实验表明,算法可以有效、快速地自动生成柱面全景图像.
【总页数】3页(P171-173)
【作者】杨艳伟;郭宝龙
【作者单位】西安电子科技大学,智能控制与图像工程研究所,西安,710071;西安电子科技大学,智能控制与图像工程研究所,西安,710071
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.一种有效的全景图像自动拼接算法 [J], 胡亚玲;江萍;胡社教
2.运用特征点匹配的柱面全景图像快速拼接算法 [J], 张媛;高冠东;贾克斌
3.一种柱面全景图像自动拼接算法 [J], 王娟;师军
4.一种快速的柱面全景图像拼接算法 [J], 安然;张秀林;刘玉
5.基于灰度累积评价的全景图像自动拼接算法 [J], 罗立宏;谭夏梅
因版权原因,仅展示原文概要,查看原文内容请购买。
柱面全景图像拼接方法的仿真分析

柱面全景图像拼接方法的仿真分析朱宁宁【摘要】随着虚拟现实(VR)技术的兴起,全景图像得到了更为广泛的应用,目前多通过求解单应矩阵对图像进行变换,由多相机拼接获取全景图像,但该方法会破坏成像中的共线条件,使拼接后的全景图像难以精确进行摄影测量中的三维重建等工作.本文提出了一种柱面全景图像拼接方法并对其进行仿真分析,该方法基于摄影测量共线方程,设定拼接相机的数目、成像焦距、成像位置和成像姿态,模拟多拼相机的成图过程,构建从三维点云到二维图像的柱面成像方程,通过成像方程不仅可以实现各图像的全景拼接,而且可对影响全景图像拼接精度的各参数进行定量分析,试验结果表明:①本文提出的柱面成像方程和全景拼接方法可用于不同数目相机及倾斜成像下的全景拼接;②利用成像方程推导的误差方程可知,全景图像拼接的精度受焦距误差、中心误差和旋角误差的影响,其中,焦距误差可通过图像重采样的方法校正,中心误差与摄影物距密切相关,而旋角误差主要受拼接相机数目的影响.%With the rise of virtual reality (VR) technology, panoramic images are used more widely, which obtained by multi-camera stitching and take advantage of homography matrix and image transformation, however, this method will destroy the collinear condition, make it's difficult to 3D reconstruction and other work.This paper proposes a new method for cylindrical panoramic image mosaic, which set the number of mosaic camera, imaging focal length, imaging position and imaging attitude, simulate the mapping process of multi-camera and construct cylindrical imaging equation from 3D points to 2D image based on photogrammetric collinearity equations.This cylindrical imaging equation can not only be used forpanoramic stitching, but also be used for precision analysis, test results show: ①this method can be used for panoramic stitching under the condition of multi-camera and inclin e imaging;②the accuracy of panoramic stitching is affected by 3 kinds of parameter errors including focus, displacement and rotation angle, in which focus error can be corrected by image resampling, displacement error is closely related to object distance and rotation angle error is affected mainly by the number of cameras.【期刊名称】《测绘学报》【年(卷),期】2017(046)004【总页数】11页(P487-497)【关键词】全景图像拼接;柱面投影;成像方程;适用性分析;精度分析【作者】朱宁宁【作者单位】武汉大学遥感信息工程学院,湖北武汉 430079【正文语种】中文【中图分类】P237全景图像能够反映摄影位置360°球型范围内的所有景致,避免了一般图像视角单一,不能带来全方位感受的缺憾,已在无人驾驶汽车(unmanned vehicle)、街景地图(street view)和虚拟现实(VR)等领域中得到广泛应用[1-5],尤其自2014年Facebook收购Oculus VR以来,VR技术得到极大推广,众多科技公司适时推出自己获取全景图像的VR设备,如2015年谷歌和GoPro联合开发完成的16拼全景相机Google Jump以及2016年Facebook发布的14拼全景相机Surround 360等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种相机标定参数的柱面全景影像拼接方法随着人工智能的发展,现代的相机标定系统已经能够实现大规模的数字图像处理操作,包括柱面全景影像拼接。
柱面全景影像拼接技术的主要作用是,将多张全景图片拼接成一张完整的全景图片。
这需要计算机视觉技术完成图像校准和点匹配,以确定每张图片彼此之间的位置关系。
本文介绍了一种基于相机标定参数的柱面全景影像拼接方法,该方法通过检测相机标定参数来获取每张图片的空间中的归一化坐标,从而实现拼接操作。
具体来说,该方法首先需要针对每张图片进行头部校准,以确定图像在视觉坐标系中的位置。
然后,通过检测相机标定参数,将图像的视觉坐标系转换为归一化坐标系,以确定图像在空间中的位置关系。
最后,利用这些信息,系统将每张图片拼接在一起,从而实现柱面全景影像拼接。
该方法具有许多优点,首先,它非常有效:只需要针对每张图片的头部校准,就可以轻松地实现柱面全景影像拼接。
另外,它也能有效提高图像拼接的准确性:利用相机标定参数,可以精准地确定图像之间的位置关系。
最后,它能够很好地处理多种复杂的拼接情况,比如缩放、旋转和偏移等。
本文介绍了一种新颖的基于相机标定参数的柱面全景影像拼接
方法,该方法既有效又能实现准确的拼接。
它有着多种优点,可以满足实际应用场景的要求。
然而,该方法仍然存在一些不足之处,例如,图像质量低时可能会影响标定精度,从而导致拼接效果不佳。
为了解
决这一问题,可以考虑开发新的图像增强技术,以改善图像质量,提高拼接的准确性。
总之,基于相机标定参数的柱面全景影像拼接技术可以满足实际应用中的要求,它可以有效地实现高准确度、高效率的拼接操作。
未来,需要研究者进一步完善和改进该技术,以使其更加完善、精确、高效。