凸轮轮廓曲线设计
机械设计-凸轮轮廓曲线的设计
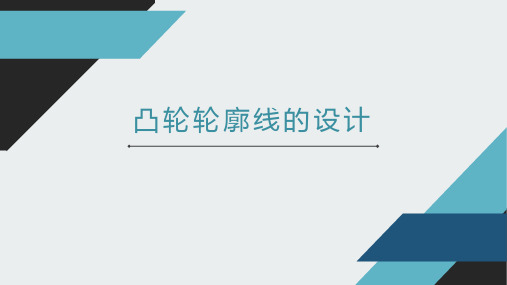
4.对心直动尖端从动件盘形凸轮轮廓设计 -ω 对心直动尖顶推杆凸轮机构中,已知凸轮的基圆半径r0,角速
度ω和推杆的运动规律,设计该凸轮轮廓曲线。
8’ 9’
ω
7’
11’
5’ 3’
1’
12’
13’ 14’
12345678 9 11 13 15
凸轮轮廓线的设计
凸轮轮廓曲线的设计
1 凸轮轮廓曲线的设计 2 凸轮机构设计中的几个问题
一、凸轮轮廓曲线的设计
1.设计方法 (1)图解法:直观,简单;但误差大,效率低,适用于不重要
的凸轮。 (2)解析法:精确,高效,可直接用于数控加工编程,适用于
高速和高精度凸轮。
2.反转法作图的原理 假设在整个机构上加上一个与凸轮角速度大小相等、 方向相反
7’
11’
5’ 3’
1’
12’
13’ 14’
1 3 5 7 8 9 11 13 15
设计步骤:
①选比例尺μl作基圆r0。 ②反向等分各运动角。原则是:陡密缓疏。 ③确定反转后,从动件滚子中心在各等份点的位置。
④将各中心点连接成一条光滑曲线。 ⑤作各位置滚子圆的内(外)包络线(中心轨迹的等距曲线)。
ω ω
压力角许用值
αmax≤[α]
推程: 移动从动件 [α] =30°, (当载荷小时 [α]=45°); 摆动从动件 [α] = 45°。 回程: 通常取[α] ≤ 70°~80°。
最大压力角可测量或计算确定。
用角度尺测量压力角
3、凸轮基圆半径的确定
➢ 基圆半径越小,凸轮的外廓尺寸越小。 ➢ 基圆半径越小,凸轮理论廓线的最小曲率半径越小,滚子凸轮的实际轮廓容易变
凸轮轮廓曲线设计

凸轮轮廓曲线设计标题:深入探索凸轮轮廓曲线设计的重要性与方法导言:在机械工程领域,凸轮轮廓曲线设计是一项至关重要的任务。
凸轮作为动力传递装置的一部分,其轮廓曲线的设计直接影响到设备的运行效果和性能。
本文将深入探讨凸轮轮廓曲线设计的重要性,并介绍一些常用的设计方法和技巧。
通过阅读本文,您将能够更全面、深入地理解凸轮轮廓曲线设计的原理和应用。
第一部分:凸轮轮廓曲线设计的重要性1.1 凸轮在机械设备中的作用1.2 轮廓曲线对机械设备性能的影响1.3 凸轮轮廓曲线设计的挑战和需求第二部分:凸轮轮廓曲线设计的方法与原理2.1 数学模型与凸轮轮廓曲线的关系2.2 基于凸轮运动学的设计方法2.3 凸轮轮廓曲线的参数化设计2.4 其他常用的凸轮轮廓设计方法和工具第三部分:凸轮轮廓曲线设计的案例研究与实践3.1 凸轮轮廓曲线设计在发动机气门控制系统中的应用3.2 某机械设备凸轮轮廓曲线设计的实践经验分享3.3 其他领域中凸轮轮廓曲线设计的创新案例第四部分:凸轮轮廓曲线设计的未来发展趋势与展望4.1 自动化与智能化在凸轮轮廓曲线设计中的应用4.2 数据驱动设计方法的兴起与应用4.3 新材料与制造工艺对凸轮轮廓曲线设计的影响总结与回顾:通过本文的阐述,我们可以看出凸轮轮廓曲线设计在机械工程领域的重要性。
凸轮轮廓曲线的设计直接关系到机械设备的运行效果和性能。
在设计过程中,我们可以使用数学模型和基于运动学的方法,结合参数化设计和实践经验,来完成凸轮轮廓曲线的设计。
未来,随着自动化和智能化技术的发展,凸轮轮廓曲线设计将变得更加高效和精确,同时新材料和制造工艺的应用也将对设计提出新的要求和挑战。
对凸轮轮廓曲线设计的观点与理解:凸轮轮廓曲线设计是一项综合性的任务,要求工程师有深厚的理论基础和实践经验。
在设计过程中,我认为深度和广度的思考是至关重要的。
我们需要考虑到凸轮在机械设备中的作用和轮廓曲线对性能的影响,同时要面对挑战和需求,以确保设计出高质量的凸轮轮廓曲线。
凸轮轮廓曲线设计的基本原理

凸轮轮廓曲线设计的基本原理一、引言凸轮作为机械传动中的一种重要元件,其设计对于机械传动的性能具有重要影响。
凸轮轮廓曲线设计是凸轮设计中的一个关键环节,其目的是使得凸轮在运动过程中能够满足特定的运动要求。
本文将介绍凸轮轮廓曲线设计的基本原理。
二、凸轮运动学基础在介绍凸轮轮廓曲线设计之前,我们需要先了解一些凸轮运动学基础知识。
1. 凸轮类型根据不同的应用场景和工作要求,凸轮可以分为以下三种类型:(1)往复式凸轮:用于转换旋转运动为往复直线运动。
(2)回转式凸轮:用于转换旋转运动为旋转或者往复曲线运动。
(3)摆线式凸轮:用于将旋转运动转换为直线往复运动。
2. 凸轮参数在进行凸轮设计时,需要确定一些关键参数,包括:(1)基圆半径:即未加工前的圆形母体半径。
(2)偏心距:即摇杆中心线与凸轮中心线的距离。
(3)凸轮高度:即凸轮曲线顶点到基圆半径的距离。
(4)凸轮半径:即凸轮曲线顶点到凸轮中心线的距离。
3. 凸轮运动在运动学分析中,我们通常将凸轮视为一个旋转体,其运动可以分为两个方向:径向和周向。
根据不同的工作要求,我们可以通过调整凸轮参数来实现不同的运动方式。
三、凸轮轮廓曲线设计基本原理在进行凸轮设计时,我们需要根据具体的工作要求来确定其运动方式,并且通过合理的曲线设计来实现这种运动方式。
下面将介绍一些常用的凸轮曲线设计方法。
1. 圆弧法圆弧法是一种简单直观的凸轮曲线设计方法。
该方法将整个曲线分为多段圆弧,并且通过调整圆弧半径和连接处角度来控制曲线形状。
该方法适用于一些简单的往复或者回转式凸轮设计。
2. 三角函数法三角函数法是一种常用的摆线式凸轮设计方法。
该方法将凸轮曲线表示为三角函数的形式,通过调整函数参数来控制曲线形状。
该方法适用于一些要求高精度和高速度的摆线式凸轮设计。
3. 贝塞尔曲线法贝塞尔曲线法是一种基于数学模型的凸轮曲线设计方法。
该方法通过定义一些控制点,并且通过调整这些控制点来实现凸轮曲线的设计。
凸轮曲线设计
凸轮曲线设计当根据使用要求确定了凸轮机构的类型、基本参数以及从动件运动规律后,即可进行凸轮轮廓曲线的设计。
设计方法有几何法和解析法,两者所依据的设计原理基本相同。
几何法简便、直观,但作图误差较大,难以获得凸轮轮廓曲线上各点的精确坐标,所以按几何法所得轮廓数据加工的凸轮只能应用于低速或不重要的场合。
对于高速凸轮或精确度要求较高的凸轮,必须建立凸轮理论轮廓曲线、实际轮廓曲线以及加工刀具中心轨迹的坐标方程,并精确地计算出凸轮轮廓曲线或刀具运动轨迹上各点的坐标值,以适合在数控机床上加工。
圆柱凸轮的廓线虽属空间曲线,但由于圆柱面可展成平面,所以也可以借用平面盘形凸轮轮廓曲线的设计方法设计圆柱凸轮的展开轮廓。
本节分别介绍用几何法和解析法设计凸轮轮廓曲线的原理和步骤。
1 几何法反转法设计原理:以尖底偏置直动从动件盘形凸轮机构为例:凸轮机构工作时,凸轮和从动件都在运动。
为了在图纸上画出凸轮轮廓曲线,应当使凸轮与图纸平面相对静止,为此,可采用如下的反转法:使整个机构以角速度(-w)绕O转动,其结果是从动件与凸轮的相对运动并不改变,但凸轮固定不动,机架和从动件一方面以角速度(-w)绕O转动,同时从动件又以原有运动规律相对机架往复运动。
根据这种关系,不难求出一系列从动件尖底的位置。
由于尖底始终与凸轮轮廓接触,所以反转后尖底的运动轨迹就是凸轮轮廓曲线。
1). 直动从动件盘形凸轮机构尖底偏置直动从动件盘形凸轮机构:已知从动件位移线图,凸轮以等角速w顺时针回转,其基圆半径为r0,从动件导路偏距为e,要求绘出此凸轮的轮廓曲线。
运用反转法绘制尖底直动从动件盘形凸轮机构凸轮轮廓曲线的方法和步骤如下:1) 以r0为半径作基圆,以e为半径作偏距圆,点K为从动件导路线与偏距圆的切点,导路线与基圆的交点B0(C0)便是从动件尖底的初始位置。
2) 将位移线图s-f的推程运动角和回程运动角分别作若干等分(图中各为四等分)。
3) 自OC0开始,沿w的相反方向取推程运动角(1800)、远休止角(300)、回程运动角(1900)、近休止角(600),在基圆上得C4、C5、C9诸点。
机械原理-凸轮轮廓曲线设计图解法

-ω
3’ 2’ 1’ ω O 1 2
1
2
3
3
直动从动件盘形凸轮轮廓的绘制
1.对心直动尖顶从动件盘形凸轮 已知凸轮的基圆半径r0,角速度ω 和从 动件的运动规律,设计该凸轮轮廓曲线。
4’ 5’ 6’
-ω ω
3’ 2’ 1’
7’
8’ 5 6 7 8
1 2 3 4
设计步骤: ①作基圆r0。
②反向等分各运动角,得到一系列与基圆的交点。
7’ 5’ 3’ 1’ 1 3 5 78 8’ 9’ 11’ 12’ 13’ 14’ 9 11 13 15
e
-ω
ω 15’ 15 14’14
k12 k11 k10 k9 k15 k14 k13
A
13’
12’
k1 13 k 12 k32 k8 k7k6 k5k4 11 10 9
O
注意:与前不同的是——过 各等分点作偏距圆的一系列 切线,即是从动件导路在反 转过程中的一系列位置线。
11’
10’ 9’
直动平底从动件盘形凸轮轮廓的绘制
直动平底从动件盘形凸轮轮廓的绘制
-
实际廓线
直动平底从动件盘形凸轮轮廓的绘制
-
实际廓线
③过各交点作从动件导路线,确定反转后从动件尖顶在各等分点的位置。 ④将各尖顶点连接成一条光滑曲线。
直动从动件盘形凸轮轮廓的绘制
2.对心直动滚子从动件盘形凸轮 已知凸轮的基圆半径r0,滚子半径 rT ,角速度ω 和从动件的运动规 律,设计该凸轮轮廓曲线。
3’ 2’ 1’ 7’ 8’ 1 2 3 4 5 6 7 8 4’
-ω
理论轮廓
ω
5’ 6’
凸轮轮廓曲线的设计
凸轮轮廓曲线的设计1. 引言凸轮是一种机械传动装置,常用于将圆周运动转换为直线或曲线运动。
凸轮的轮廓曲线设计是指根据特定要求和功能,确定凸轮的形状和尺寸的过程。
本文将详细介绍凸轮轮廓曲线的设计原理、方法和注意事项。
2. 凸轮轮廓曲线的基本原理凸轮的基本原理是通过其特定形状的外边缘,使其在旋转时能够驱动其他机械部件做直线或曲线运动。
凸轮的外形通常由一条或多条连续光滑的曲线构成,这些曲线被称为凸轮的轮廓曲线。
3. 凸轮轮廓曲线设计方法3.1 几何法几何法是最常用的凸轮轮廓曲线设计方法之一。
其基本步骤如下:1.确定所需运动类型:直线运动、往复运动、旋转运动等。
2.根据所需运动类型选择合适的基本函数:例如直线函数、正弦函数等。
3.根据基本函数的特点和要求,确定凸轮的参数:例如振幅、周期等。
4.利用基本函数和凸轮参数,绘制凸轮的轮廓曲线。
5.对绘制得到的曲线进行优化和调整,以满足设计要求。
3.2 数值法数值法是利用计算机辅助设计软件进行凸轮轮廓曲线设计的方法。
其基本步骤如下:1.确定凸轮的运动类型和要求。
2.利用计算机辅助设计软件创建凸轮模型。
3.在软件中选择合适的曲线函数和参数,并进行凸轮参数设置。
4.根据所选曲线函数和参数,生成凸轮的轮廓曲线。
5.对生成的曲线进行优化和调整,以满足设计要求。
3.3 实验法实验法是通过制作实物模型来进行凸轮轮廓曲线设计的方法。
其基本步骤如下:1.根据设计要求和实际情况,选择合适的材料和加工工艺制作凸轮模型。
2.在模型上标记出所需运动类型对应的参考点。
3.利用传感器等设备记录参考点在运动过程中的位置。
4.根据记录的数据,绘制凸轮的轮廓曲线。
5.对绘制得到的曲线进行优化和调整,以满足设计要求。
4. 凸轮轮廓曲线设计的注意事项在进行凸轮轮廓曲线设计时,需要注意以下几点:•凸轮的形状和尺寸应符合机械传动要求和设计规范。
•轮廓曲线应光滑、连续,避免出现尖锐转角和突变点。
•曲线参数的选择应合理,以确保凸轮能够正常运动并满足设计要求。
解析法设计凸轮轮廓曲线

由方程
x y
= =
(s0 (s0
+ +
s) sin d s) cosd
+ ecosd - e sin d
ü ý þ
可得
dx / dd = (ds / dd - e) sin d + (s0 + s) cosd ü
dy / dd
= (ds / dd
- e) cosd
- (s0
+
s)
sin
d
ý þ
sinq = (dx / dd ) / (dx / dd )2 + (dy / dd )2 ïü
ý
cosq = -(dy / dd ) / (dx / dd )2 + (dy / dd )2 ïþ
式中e为代数值: (1)当凸轮逆时针转动,推杆在O点右侧时,正偏置,取“+”号;
推杆在O点左侧时,负偏置,取“”号; (2)当凸轮顺时针转动,推杆在O点左侧时,正偏置,取“+”号;
推杆在O点右侧时,负偏置,取“”号;
2.对心平底推杆盘形凸轮机构
已知:基圆半径r0、s=s(d)、凸轮转动角 速度w。 建立图示坐标系,当凸轮转过d角, 推杆产生位移s,平底与凸轮在B点 相切,P为凸轮与推杆的相对瞬心。
n =n P = OPw
OP =n / w = ds / dd
B点的坐标为:
x y
= =
(r0 (r0
+ +
s) s)
解析法设计凸轮轮廓曲线
1.偏置直动滚子推杆盘形凸轮机构
已知:基圆半径r0、偏心距e、s=s(d)、凸 轮转动角速度w、滚子半径rr。
建立图示坐标系,当凸轮转过d角,推 杆产生位移s,采用反转法,确定滚子 中心在B点的坐标。
8盘型凸轮轮廓曲线设计

“反转法”原理
凸轮转动、从动件 在导路中移动
对整个系统施 加-运动
凸轮保持不动 推杆:复合运动=
反转运动(-) + 预期运动(s)
机
械
基
-
础
A
AA
AA
AAAA
r0
r
0
对心尖顶移动从动件盘形凸轮轮廓的设计
已设知计::r凸0,轮推廓杆线运动规律,凸轮逆s 时针方向转动
简单直观,可直接得出凸轮的轮廓,但作图有一定误差,设计精度不高。
机
工程上应用较多。
械
基
础
解析法
精度较高,但设计计算量大,
多用于精密或高速凸轮机构的设计中
凸轮轮廓的设计方法 图解法
依据“反转法” 对整个系统施加-w运动
机 械 基 础上面的图,在图片中 是动画,帮录下来凸轮轮廓的设计方法
1、偏置尖顶移动从动件盘形凸轮轮廓的设计
凸轮轮廓的设计方法
2、滚子移动从动件盘形凸轮轮廓的设计
已知:r0,推杆运动规
机 械
律,滚子半径r1, 凸 轮逆时针方 向转
基
动
础
设计:凸轮廓线
h
s
0
120 600
900
900
理论轮廓 实际轮廓
凸轮轮廓的设计方法
总结
1、偏置尖顶移动从动件盘形凸轮轮廓曲线设计
机
械
2、滚子移动从动件盘形凸轮轮廓的设计
h
机
解:
械
基
1. 定比例尺l
φ
0
120 1800
2700 3600
础
2. 初始位置及推杆位移曲线
3. 确定推杆反转运动占据的各 角度位置
第九章3 凸轮轮廓曲线的设计

式中“ 式中“-”对应于内等距线,“+”对应于外等距线。 对应于内等距线, 对应于外等距线。
3.2 对心直动平底推杆盘形凸轮 建立坐标系如图:反转δ后,推杆移动距离为S, 推杆移动距离为S 建立坐标系如图: P点为相对瞬心, 推杆移动速度为: v=vp=OPω 点为相对瞬心, 推杆移动速度为: =OPω
-V
φ
A
2rr φ
A A0
4’,5’,6’ 7’ 3’ 2’ ’ A A 8 A
1 2 1’ 3
4” A A
4
5”
6”
7”
A
5
2”
6
3” A A A A
7 8 9 0
中线
8” 9” 0”
9’ 0’ 0”
1”
R
V=ωR
JM
返回
3.用解析法设计凸轮的轮廓曲线 原理:反转法。设计结果:轮廓的参数方程。 原理:反转法。设计结果:轮廓的参数方程。 3.1 偏置直动滚子推杆盘形凸轮机构 由图可知: 由图可知:s0=(r02-e2)1/2
9-3 凸轮轮廓曲线的设计
1、凸轮廓线设计方法的基本原理 反转原理: 反转原理: 给整个凸轮机构施以给整个凸轮机构施以-ω时,不影响各 构件之间的相对运动,此时,凸轮将静止, 构件之间的相对运动,此时,凸轮将静止, 而从动件尖顶复合运动的轨迹即凸轮的轮廓 曲线。 依据此原理可以用几何作图的方法 设计凸轮的轮廓曲线, 设计凸轮的轮廓曲线,
θ (x, y)
可得: 可得: sinθ= ( dx/dδ) / ( dx/dδ)2+( dy/dδ)2 cosθ= -( dy/dδ) / ( dx/dδ)2+( dy/dδ)2 实际轮廓为B’点的坐标 点的坐标: x’=x - rrcosθ 实际轮廓为B’点的坐标: y’= y - rrsinθ
凸轮轮廓曲线的设计
2)过辅助圆上B0点作该辅助圆的切线,该切线即为 从动件导路中心线的位置线。该位置线与基圆相交于 A0点,点A0即是从动件的初始位置,如图7-15(a)。
3)连接O A0。从O A0开始,沿(-ω)方向在基圆 上依次量取凸轮各转角δ0、δs、δ’0、δ’s,再将 推程角δ0、回程角δ’0分成与位移线图相同的等份, 得到A1、A2、A3、…等各点。
(7-6)
3.压力角与传力性能
在设计凸轮机构时,应使最大压力角αmax不超过某 一许用值[α],即
αmax≤[α]
(7-7)
工程上,一般推程阶段许用压力角[α]的推荐值分别为
移动从动件 [α]=30°~40°
摆动从动件 [α]=40°~50°
机械设计基础
Machine Design Foundation
机械设计基础
Machine Design Foundation
凸轮轮廓曲线的设计
图7-13对心滚子移动从动件盘形凸轮轮廓的绘制
机械设计基础
Machine Design Foundation
凸轮轮廓曲线的设计
图7-14平底从动件盘形凸轮轮廓的绘制
机械设计基础
Machine Design Foundation
凸轮轮廓曲线的设计
4.基圆半径 rb的确定
在选取基圆半径时,应综合考虑下述几个方面:
(1)在保证αmax≤[α]的前提下,应尽可能选用较 小的基圆半径,以满足结构紧凑的要求。
(2)为了满足凸轮结构及制造的要求,基圆半径rb 必须大于凸轮轴的半径rs,即rb> rs。
(3)为了避免从动件运动失真,必须使凸轮实际轮 廓曲线的最小曲率半径ρ’min大于零,通常规定ρ’min> 1~5 mm 。
机械原理教案12凸轮机构轮廓曲线的设计

二、用图解法设计凸轮轮廓曲线 下面以偏置尖顶直动从动件盘形凸轮机构为例,讲解凸轮廓线的设计过程。
例6-1 对心直动尖顶从动件盘形凸轮机构设已确定基圆半径mm 150=r ,凸轮顺时针方向匀速转动,从动件行程mm 18=h 。
从动件运动规律如下表所示:推程 远休止 回程 近休止运动角1120δ=260δ=903=δ490δ=从动件运动规律等速运动正弦加速度运动设计步骤:1、建立推程段的位移方程:18120s δ=,回程段的位移方程:12π181sin 902π90s δδ⎡⎤⎛⎫=-+ ⎪⎢⎥⎝⎭⎣⎦,将推程运动角、回程运动角按某一分度值等分成若干份,并求得对应点的位移。
2、画基圆和从动件的导路位置3、画反转过程中从动件的各导路位置4、画从动件尖顶在复合运动中的各个位置点5、分别将推程段和回程段尖顶的各位置点连成光滑曲线,再画出远休止段和近休止段的圆弧,即完成了尖顶从动件盘形凸轮轮廓曲线的设计,如图6-18。
需要注意:同一个图上作图比例尺必须一致。
如各分点的位移与基圆应按相同比例尺量取。
2.偏置直动尖顶从动件盘形凸轮机构凸轮转动中心O 到从动件导路的垂直距离e 称为偏距。
以O 为圆心,e 为半径所作的圆称为偏距圆。
显然,从动件导路与偏距圆相切(图中K 为从动件初始位置与基圆的切点)。
在反转过程中,从动件导路必是偏距圆的切线。
如图6-19。
r0a A0A1OB0B1内 容3.直动滚子从动件盘形凸轮机构例题:已知:r r -滚子半径,0r -基圆半径,从动件运动规律。
设计该机构。
设计思路:把滚子中心看作尖顶从动件的尖顶,按前述方法先画出滚子中心所在的廓线——凸轮的理论廓线。
再以理论廓线上各点为圆心,以滚子半径r r 为半径画一系列的圆,这些圆的内包络线 即为凸轮的实际廓线(或称为工作廓线)。
如图6-16 注意:滚子从动件盘形凸轮的基圆半径是指其理论廓线的最小向径4.对心直动平底从动件盘形凸轮机构思路:把平底与导路的交点A看作尖顶从动件的尖点,依次作出交点的位置,通过这些位置点画出从动件平底的各个位置线,然后作这些平底的包络线,即为凸轮的工作廓线,如图6-17图6-16图6-17图6-18图6-19内 容5.摆动尖顶从动件盘形凸轮机构已知:基圆半径0r ,摆动从动件的杆长为L (从尖点到从动件回转中心的距离),凸轮回转中心到从动件回转中心的距离a 。
基于matlab的凸轮轮廓曲线设计
基于matlab的凸轮轮廓曲线设计凸轮是机械中常见的关键零件之一,其主要功能是将旋转的运动转化为直线运动,用于推动某些机械元件进行工作。
凸轮轮廓曲线的设计对于凸轮的运动和工作效率有着重要的影响。
在本文中,我们将介绍基于matlab的凸轮轮廓曲线设计方法,以帮助读者了解凸轮轮廓曲线设计的基本概念和方法。
凸轮的形状通常是复杂的非圆形曲线。
凸轮的轮廓曲线设计过程中,需要考虑控制凸轮输送运动的速度和加速度等因素,同时还需要考虑各种机械元件之间的协调性和协定性。
针对以上问题,我们提出了基于连续逼近法的凸轮轮廓曲线设计方法。
1. 连续逼近法的基本原理连续逼近法是一种典型的非线性规划方法,其基本思想是将目标函数逐渐逼近最优解。
在凸轮轮廓曲线设计中,我们可以将凸轮轮廓曲线视为目标函数,通过不断调整曲线的形状,逐渐逼近最优轮廓曲线。
连续逼近法的具体实现过程包括以下步骤:(1)确定初始值首先需要确定一个初始轮廓曲线,通常可以使用圆弧、抛物线等基本曲线来作为起始轮廓曲线。
(2)建立数学模型接着需要建立凸轮轮廓曲线的数学模型,以便于通过数值方法来求解最优轮廓曲线。
其中,常见的模型包括三次贝塞尔曲线、三次样条曲线等。
(3)计算目标函数根据建立的数学模型,通过计算目标函数来评估轮廓曲线的性能。
通常,目标函数包括运动速度、加速度、平衡性等因素。
(4)优化轮廓曲线通过对目标函数的优化,不断调整轮廓曲线的形状,逐渐逼近最优曲线。
(5)确定最优解最终确定最优解,并验证其性能。
matlab是一种常见的数学软件,可以运用其强大的计算能力来进行凸轮轮廓曲线的设计。
具体实现过程如下:(1)数据处理将凸轮相关的数据通过matlab进行存储和处理。
常见的数据包括凸轮的尺寸、旋转角度、轮廓曲线等。
根据凸轮的数据建立轮廓曲线的数学模型,其中包括选择适当的曲线类型、确定曲线参数等。
(5)性能验证3. 总结。
南京理工大学机械设计基础上——解析法设计凸轮的轮廓曲线

§4—4 用解析法设计凸轮的轮廓曲线一、滚子从动件盘形凸轮1.理论轮廓曲线方程(1)直动从动件盘形凸轮机构图示偏置直动滚子从动件盘形凸轮机构。
求凸轮理论廓线的方程,反转法给整个机构一个绕凸轮轴心O 的公共角速度-ω,这时凸轮将固定不动,而从动件将沿-ω方向转过角度ϕ,滚子中心将位于B 点。
B 点的坐标,亦即理论廓线的方程为:⎭⎬⎫++=-+=ϕϕϕϕsin )(cos sin cos )(00s s e y e s s x (4-15) 220e r s a -=,r a 为理论廓线的基圆半径,对于对心从动件凸轮机构,因e=0,所以s 0=r a ⎭⎬⎫+=+=ϕϕs i n )(c o s )(s r y s r x a a (4-16) (2)摆动从动件盘形凸轮机构图所示为摆动滚子从动件盘形凸轮机构。
仍用反转法使凸轮固定不动,而从动件沿-ω方向转过角度ϕ,滚子中心将位于B 点。
B 点的坐标,亦即理论廓线的方程为:⎭⎬⎫-+-=-+-=)sin(sin )cos(cos 00ϕψψϕϕψψϕl a y l a x (4-17) ψ0为从动件的起始位置与轴心连线OA 0之间的夹角。
alr r l a T 2)(arccos 20220+-+=ψ (4-18) 在设计凸轮廓线时,通常e 、r 0、r T 、a 、l 等是已知的尺寸,而s 和ψ是ϕ的函数,它们分别由已选定的位移方程s =s (ϕ)和角位移方程ψ=ψ(ϕ)确定。
2.实际廓线方程滚子从动件盘形凸轮的实际廓线是圆心在理论廓线上的一族滚子圆的包络线。
由微分几何可知,包络线的方程为:⎪⎭⎪⎬⎫=∂∂=0),,(0),,(1111ϕϕϕy x f y x f (4-20) 式中x 1、y 1为凸轮实际廓线上点的直角坐标。
对于滚子从动件凸轮,由于产生包络线(即实际廓线)的曲线族是一族滚子圆,其圆心在理论廓线上,圆心的坐标由式(4-15)~(4-17)确定,所以由(4-20)有:0)()(),,(2212111=--+-=T r y y x x y x f ϕ0)(2)(2),,(1111=----=∂∂ϕϕϕϕd dy y y d dx x x y x f式(a )和(b )联立求解x 1和y 1,即得滚子从动件盘形凸轮的实际廓线参数方程: ⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛±=221221//ϕϕϕϕϕϕd dy d dx d dx r y y d dy d dx d dy r x x T T (4-21) 上面的一组加减号表示一根外包络廓线,下面的一组加减号表示另一根内包络廓线。
机械原理凸轮轮廓曲线设计
120º 60º 90º 90º
设计步骤
③① 确选定比反例转尺后从l,动作件位尖移顶曲在线各和 11 基等圆分r点0。占据的位置。
④②将等各分尖位顶移点曲连线接及成反一向条等光分滑各曲运线。动角,确定反转后对应 于各等分点的从动件的位置。
2. 偏置尖顶移动从动件盘形凸轮廓线的设计
已知凸轮的基圆半径r0,角速度
4.对心直动平底推杆盘形凸轮
对心直动平底推杆凸轮机构中,已知凸
轮的基圆半径r0,角速度ω和推杆的运动规律,
设计该凸轮轮廓曲线。
8’ 9’
7’
11’
5’ 3’
1’
12’
13’ 14’
1 3 5 7 8 9 11 13 15
1’ 2’ 3’
12 3
4’
4
5’
5
15 14’
14
13’ 13
12
12’
11 10 9
6
6’
7
8
7’
8’
设计步骤:
①选比例尺μl作基圆r0。 ②反向等分各运动角。原则是:陡密缓疏。
③确定反转后,从动件平底直线在各等份点的位置。
11’ 10’ 9’
了解
④作平底直线族的内包络线。
5.摆动尖顶从动件盘形凸轮机构
摆动尖顶推杆凸 轮机构中,已知凸轮 的基圆半径r0,角速度 d
ω,摆动推杆长度l以
从动件的运动规律,设计该凸
轮轮廓曲线。
s
8 7
5
3
1
910 11 12 13 14
1 3 5 7 8 9 1113 15
120º 60º 90º 90º
实际轮廓曲线
设计步骤
圆各络动r等线④角⑤b①③②。。分,将作确点选确等各滚定占比定分点反子据例反位连转圆的尺转移接后族位后曲成l,从及置对线一作动。滚应及条位件子于反光移滚圆各向滑曲子族等等曲线中分的分线和心点各内。基在的运包 11
凸轮轮廓曲线设计
已知: 凸轮逆时针转动,
求 : 凸轮的基圆半径, 转动 90之后的压力角
• 解:
理论轮 廓
基圆 基圆
习题
25
第6章 凸轮机构
例题2
已知: 凸轮逆时针转动, 求 : 凸轮的基圆半径, 转 动90之后的压力角
• 解:
理论轮廓
基圆
基圆
习题
? 速度方向
26
6-4 图解法设计凸轮轮廓
已知从动件的运动规律[s =s(δ1)、v=v(δ1)、a=a(δ1)]及凸轮 机构的基本尺寸(如rmin、e)及转向,作出凸轮的轮廓曲线。
一、反转法原理
-w
s
-
B1
s
rb
B0
B
w
e
o
S
2
27
叉, 运动失真。
rT
min= rT ’= min-rT=0
rT
min < rT ’= min-rT<0
11
§6-3 图解法设计凸轮轮廓
结论: 内凹凸轮廓线: • 滚子半径无限制 外凸凸轮廓线: 运动失真原因:min<rT 避免方法
(1)减小滚子半径rT
(2)通过增大基圆半径rmin来加大理论轮廓曲线的min
件上力作用点的速度方向之间
所夹的锐角。
F'' F'tg
n F ' F cos F '' F sin
α ↑ 有害分力F" ↑有用分力 F' ↓
fF" ≥F'?
机构发生自锁现象,所以设计时要控制压力角不宜过大 17
§6-4 凸轮机构基本参数的确定
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
联立以上两式得滚子直动从动件盘状凸轮实际廓线方程:
实验数据及处理
在 MATLAB 的 workspace 中查找变量,或者是在 Command Window 中直接 输入变量名查找,例如 x(30) = 16.1909 得到: 理论廓线: x = 16.1909
Y = 20.8948 实际廓线: x1 = 7.8650
Y1 = 15.3560 并且画出坐标轴与基圆,下图为得到的凸轮廓线:
plot(x,y,'r-',xx,yy,'g-') text(0,20,'实际轮廓线') text(65,40,'理论轮廓线') hold on
alpha=0:pi/20:2*pi;%角度[0,2*pi] xxxx=ra*cos(alpha); yyyy=ra*sin(alpha); plot(xxxx,yyyy,'bl-')
3/6
教材上的计算结果为: 理论廓线: x = 16.191mm
Y = 20.895mm 实际廓线: x1 = 7.865mm
Y1 = 15.356mm 结果与实验编程的结果相同,得出程序正确。并且从绘出的凸轮轮廓曲线 来看完全符合常识,也是正确的。 其他实验数据数据量过于庞大,不再列举出来,可以运行附录源代码,得 到中间的所有数据。
2. 按照原理进行编程,已知数据选用教材例 6-1 的数据,以便对数据的 正确性进行验证.需要注意的是凸轮廓线计算要分推程段、远休止、回 程、近休止,各段的 s 计算方法不同,需要注意。
3. 选取������ = 300时凸轮理论廓线坐标 x,y 与教材结果进行对比,验证实 验的正确性。
4. 随意更改已知变量,观看画出凸轮形状的变化。
%正弦加速度规律 推程
速度方程式
x(i)=(s0+s1)*cos(qq(i))-e*sin(qq(i));
y(i)=(s0+s1)*sin(qq(i))+e*cos(qq(i));%凸轮理论廓线
M(i)=(s0+s1)*sin(qq(i))-(v1/w-e)*cos(qq(i));
N(i)=(s0+s1)*cos(qq(i))+(v1/w-e)*sin(qq(i));%M、N 值
wx=[-(s0+h+2*rr),(s0+h+2*rr)];wy=[0,0];plot(wx,wy);plot(wy,wx); axis equal hold on
6/6
滚子直动从动件盘状凸轮实际廓线方程,圆族方程为:
F(x1, y1, φ) = (������ − ������1)2 + (������ − ������1)2 − ������������2 = 0
式中 rt——滚子半径。
整理上述三个个方程组,得:
F(x1, y1, φ) = (������1 + ������������������������φ − (s0 + s)cosφ)2 + (������1 − ������ ������������������φ − (s0 + s)sinφ)2 − ������������2 = 0
2/6
x1 = −������������������������������ + (������0 + ������)������������������������ ∓
������������
1
[1+(������������)2]2
y1
=
������1������
+
(������0
+
������)
y(i)=(s0+s2)*sin(qq(i))+e*cos(qq(i));%凸轮理论廓线
M(i)=(s0+s2)*sin(qq(i))-(v2/w-e)*cos(qq(i));
N(i)=(s0+s2)*cos(qq(i))+(v2/w-e)*sin(qq(i));%M、N 值
xx(i)=x(i)-rr*N(i)/(M(i)^2+N(i)^2)^(1/2);
������������ ������������������式中 NhomakorabeaM
=
(s0
+
s)sin������
−
( ������������
������������
−
������)������������������������
N
=
(s0
+
s)cos������
+
( ������������
������������
xx(i)=x(i)-rr*N(i)/(M(i)^2+N(i)^2)^(1/2);
yy(i)=(xx(i)*M(i)+(s0+s1)*(v1/w))/N(i);%凸轮实际廓线
end
for i=(tui1+1):1:(tui1+tui2)%远休段
qq(i)=i*pi/180;
s2=h;v2=0;
x(i)=(s0+s2)*cos(qq(i))-e*sin(qq(i));
������ ������������ ������(������1, ������1, ������)
= 2(x1 + esin������ − (������0 + ������)������������������������) ������������
∙ [ecos������ + (������0 + ������)������������������������ − ������������������������ ������������] + 2[������1 − ������������������������������ − (������0 + ������)������������������������]
偏置直动滚子盘状凸轮轮廓曲线设计
实验目的
熟练掌握偏置直动滚子盘状凸轮轮廓曲线理论曲线、实际曲线设计的 方法和原理,并借助计算机编程实现和绘出曲线。
实验原理
设计滚子从动件盘状凸轮实际廓线,应先求理论廓线,再以理论廓线 上各点为圆心、滚子半径为半径画圆族,圆族的包络线即为实际廓线。
理论廓线 如右图所示,偏置滚子直动 从动件盘状凸轮,A0K0 为从 动件导路起始位置,AK 为 从动件反转φ角后的位置。 直角坐标系 OXY 与凸轮固 连,圆点在凸轮轴心上,X 轴平行于 A0K0;由 X 轴正 向沿(-ω)方向转 90o 为 Y 轴方向 。 理论廓线上点 A 的坐标, 及理论廓线方程为
+
������)������������������������
式中含∓项,上面的用于求内包络线(外凸轮),下面的用于求外包络线(内
凸轮);������������ 为代数值,推程为正,回程为负。
������������
实验步骤
1. 本次实验需要画出凸轮轮廓,且公式比较复杂,选用数学工具 MATLAB 进行编程计算。
yy(i)=(xx(i)*M(i)+(s0+s2)*(v2/w))/N(i);%凸轮实际廓线
end
for i=(tui1+tui2+1):1:(tui1+tui2+hui1)%回程段
5/6
qq(i)=i*pi/180;qq1(i)=qq(i)-qs;%150*pi/180; s3=h/2*(1+cos(pi*qq1(i)/(q1-qs))); v3=-w*pi*h/(2*(q1-qs))*sin(pi*qq1(i)/(q1-qs)); x(i)=(s0+s3)*cos(qq(i))-e*sin(qq(i)); y(i)=(s0+s3)*sin(qq(i))+e*cos(qq(i));%凸轮理论廓线 M(i)=(s0+s3)*sin(qq(i))-(v3/w-e)*cos(qq(i)); N(i)=(s0+s3)*cos(qq(i))+(v3/w-e)*sin(qq(i));%M、N 值 xx(i)=x(i)-rr*N(i)/(M(i)^2+N(i)^2)^(1/2); yy(i)=(xx(i)*M(i)+(s0+s3)*(v3/w))/N(i);%凸轮实际廓线 end for i=(tui1+tui2+hui1+1):1:360%近休段 qq(i)=i*pi/180; x(i)=(s0+0)*cos(qq(i))-e*sin(qq(i)); y(i)=(s0+0)*sin(qq(i))+e*cos(qq(i));%凸轮理论廓线 M(i)=(s0+0)*sin(qq(i))-(v3/w-e)*cos(qq(i)); N(i)=(s0+0)*cos(qq(i))+(v3/w-e)*sin(qq(i));%M、N 值 xx(i)=x(i)-rr*N(i)/(M(i)^2+N(i)^2)^(1/2); yy(i)=(xx(i)*M(i)+(s0+s3)*(v3/w))/N(i);%凸轮实际廓线 end
附录
Tulundesign.m(MATLAB 实现)
clear all;
h=32;%行程