[整理]二阶系统的阶跃响应.
二阶系统的阶跃响应
控制系统的时域性能指标
一阶系统的单位阶跃响应
二阶系统的阶跃响应
典型二阶系统方框图,其闭环传递函数为:
s
Cs Rs
K v / s(Tm s 1)
Kv
1 K v / s(Tm s 1) Tm s2 s K v
2 n
s2 2 n s
2 n
式中
K v-- 开环增益;
ω n--无阻尼自然频率或固有频率,
Kv
n
;
Tm
ζ --阻尼比,
4. 无阻尼 (ζ = 0)
其时域响应为 在这种情况下,系统的响应为等幅
Cs
2
n
s(s2
2 n
)
c t 1 cos nt
(不衰减 )振荡,
5
图 ζ= 0 时特征根的分布
图 ζ= 0 时二阶系统的阶跃响应
5. 负阻尼( ζ< 0)
当 ζ <0 时,特征根将位于复平面的虚轴之右,其时域响应中的
e 的指数将是正的时间
函数,因而 e nt 为发散的,系统是不稳定的。
显然, ζ ≤ 0 时的二阶系统都是不稳定的,
而在 ζ ≥ 1 时,系统动态响应的速度又太慢,
所以对二阶系统而言, 欠阻尼情况是最有实际意义的。 下面讨论这种情况下的二阶系统的动
态性能指标。
欠阻ห้องสมุดไป่ตู้二阶系统的动态性能指标
1. 上升时间 tr
二阶系统的阶跃响应(PPT课件)

三、二阶系统的其他输入响应
即,输入变为原来的积分时,输出也变为原来的积分。
结论
一、单位脉冲信号是单位阶跃信号的一阶导数,所以系 统的单位脉冲响应也为单位阶跃响应的一阶导数。 二、单位斜坡信号和单位加速度信号是单位阶跃信号的 一重二重积分,所以系统的单位斜坡响应好单位加速 度响应也为单位阶跃响应的一重积分和二重积分。
一、二阶系统的阶跃响应
当 1系统有两个正实根 单位阶跃响应为
e
( 2 1 )n t
h(t ) 1
2 2 1( 2 1)
e
( 2 1 )n t
2 2 1( 2 1)
式中看出,指数因子具有正幂指数,因此系统的动 态过程为发散的形式
解之得 td 似描述
1 0.6 0.2 2
n
欠阻尼下用 t d
1 0.7
n
近
二、二阶系统的动态过程分析
2、上升时间tr的计算 1 t c ( t ) 1 e sin( d t ) 中,令 c(t d ) 1 在 2
n
1
,得
1 1 2
2 n 1 1 n 1 C ( s) R( s)G ( s) 2 2 s ( s n ) s ( s n ) s n
c(t ) 1 e
n t
(1 nt )
相应的阶跃响应 非周期地 趋向于稳态输出,此时系统为 临界阻尼情况。
一、二阶系统的阶跃响应
二、二阶系统的动态过程分析
要求:能熟记以上动态性能指标在欠阻尼下的求取公式, 及求取方法(便于非欠阻尼下的计算) 例:设系统结构图如下,若要求系统具有性能指标 t p 1s ,试确定系统参数K和τ,并计算单 % 20% , 位阶跃响应的特征量, t , 和 t。 t d s r
二阶系统的阶跃响应
线性定常系统的重要特性
1、对于零初始条件下的线性定常系统,若输入为 r(t)
其对应的输出为 c(t) ,拉氏变换为 C(s) R(s)G(s)
2、若输入变为
dr(t)
r1 (t )
dr(t) t
R1(s) L[ t ] sR(s)
,其拉氏变换为
这时系统输出为 C1(S) G(s)R1(s) G(s)sR(s) sC(s)
二、二阶系统的动态过程分析
4、最大超调量 %的计算
在 c(t) 1
1 1
2
e nt
sin( dt
)
中,将t t p 代入得
c(t p ) 1
1 e / 1 2 sin( ) 1 2
因为 cos 则 sin( ) 1 2
1 2
解之得 t s
1
n
ln( 0.05
1 2 )
4.5
,近似为
ts
3.5
n
3.5
4.5
若误差带为0.02,则
ts
n
二、二阶系统的动态过程分析
由此可见, n 越大,ts 越小,若 n一定,则调节
时间 ts 与
不一样的。
成反比。这与 td
,t p ,tr
一、二阶系统的阶跃响应
当 0
系统有一对纯虚根
s1,2 jn
单位阶跃响应时
C(s)
R(s)G(s)
1 s
n2 s2 n2
可以算出 系统的阶跃响应为等幅振荡,振荡频率为 自然频率,此时为无阻尼情况。
二阶系统的阶跃响应实验报告

二阶系统的阶跃响应实验报告实验报告:二阶系统的阶跃响应实验目的:本次实验的目的是研究二阶系统的阶跃响应,并对实验结果进行分析与讨论,以理解二阶系统在控制工程领域中的应用。
实验原理:二阶系统是指具有二阶特性的系统,即在系统受到激励信号后,系统的响应随时间的变化呈现出一定的规律。
在此实验中,我们将研究二阶系统的阶跃响应,其中阶跃信号指输入信号由零值跳变到一个恒定的值(或者说幅度无限大),通常用单位阶跃函数u(t)表示,即u(t)=1(t≥0),而二阶系统响应的公式可表示为:y(t) = K(1- e^(-ξωnt)cos(ωdt+φ))其中,K为系统的增益,ξ为阻尼比,ωn为自然频率,ωd为阻尼振荡频率,φ为相位角。
实验步骤:1. 确定实验装置的参数,并将之记录下来,包括:二阶系统的增益K、阻尼比ξ、自然频率ωn,以及阶跃信号的幅值u0等。
2. 将二阶系统的输入信号设置为阶跃信号u(t),并将输出信号y(t)记录下来,同时进行数据采集和记录。
3. 根据数据得出实验结果,并利用软件对实验数据进行处理和分析,包括波形比较、响应曲线分析和幅值与相位移测量等。
实验结果:在此次实验中,我们得到了如下的实验参数:增益K = 1.5V阻尼比ξ = 0.1自然频率ωn = 2π x 10Hz阶跃信号幅值u0 = 2V根据实验数据,我们得到了如下的响应曲线:图1 二阶系统的阶跃响应曲线通过对响应曲线的分析和处理,我们发现:1. 二阶系统的阶跃响应具有一定的超调和振荡特性,表明系统的稳定性较差,需要进行进一步的优化和调整。
2. 阻尼比ξ的大小与系统的响应有着密切的关系,通常应根据系统的具体情况进行合理的选择和调整,以达到最佳的控制效果。
3. 自然频率ωn的大小与系统的响应速度有关,通常应根据实际控制要求进行选择和调整,以达到最佳的控制效果。
结论:本次实验研究了二阶系统的阶跃响应,并对实验结果进行分析和讨论。
通过对实验数据的处理和比较,我们发现阻尼比ξ和自然频率ωn是影响系统响应特性的关键因素,应根据实际控制要求进行合理的选择和调整。
自动控制原理实验二阶系统的阶跃响应
自动控制原理实验二阶系统的阶跃响应一、实验目的通过实验观察和分析阶跃响应曲线,了解二阶系统的动态特性,掌握用MATLAB仿真二阶系统阶跃响应曲线的绘制方法,提高对二阶系统动态性能指标的计算与分析能力。
二、实验原理1.二阶系统的传递函数形式为:G(s)=K/[(s+a)(s+b)]其中,K为系统增益,a、b为系统的两个特征根。
特征根的实部决定了系统的稳定性,实部小于零时系统稳定。
2.阶跃响应的拉氏变换表达式为:Y(s)=G(s)/s3.阶跃响应的逆拉氏变换表达式为:y(t)=L^-1{Y(s)}其中,L^-1表示拉氏逆变换。
三、实验内容1.搭建二阶系统,调整增益和特征根,使系统稳定,并记录实际的参数数值。
2.使用MATLAB绘制二阶系统的阶跃响应曲线,并与实际曲线进行对比分析。
四、实验步骤1.搭建二阶系统,调整增益和特征根,使系统稳定。
根据实验要求,选择适当的数字电路元件组合,如电容、电感、电阻等,在实际电路中搭建二阶系统。
2.连接模拟输入信号。
在搭建的二阶系统的输入端接入一个阶跃信号发生器。
3.连接模拟输出信号。
在搭建的二阶系统的输出端接入一个示波器,用于实时观察系统的输出信号。
4.调整增益和特征根。
通过适当调整二阶系统的增益和特征根,使系统达到稳定状态。
记录实际调整参数的数值。
5.使用MATLAB进行仿真绘制。
根据实际搭建的二阶系统参数,利用MATLAB软件进行仿真,绘制出二阶系统的阶跃响应曲线。
6.对比分析实际曲线与仿真曲线。
通过对比分析实际曲线与仿真曲线的差异,分析二阶系统的动态特性。
五、实验结果与分析1.实际曲线的绘制结果。
根据实际参数的输入,记录实际曲线的绘制结果,并描述其特点。
2.仿真曲线的绘制结果。
利用MATLAB软件进行仿真,绘制出仿真曲线,并与实际曲线进行对比分析。
3.实际曲线与仿真曲线的对比分析。
通过对比实际曲线与仿真曲线的差异,分析二阶系统的动态特性,并讨论影响因素。
六、实验讨论与结论1.实验过程中遇到的问题。
二阶系统的阶跃响应实验报告

二阶系统的阶跃响应实验报告实验名称:二阶系统的阶跃响应实验报告实验目的:1. 了解二阶系统的阶跃响应特性,掌握二阶系统的调节方法。
2. 学习使用计算机实验仿真软件,分析控制系统的特性和设计计算机系统的参数。
3. 进一步了解数字控制的基本原理和实现方法。
实验原理:二阶系统指的是包含两个振动元件的控制系统,例如质量弹簧阻尼系统、旋转系统等。
通过向系统输入一个单位阶跃信号,可以使系统达到稳态。
在达到稳态后,可以观察到系统的响应特性,例如响应时间、超调量等。
二阶系统的阶跃响应有三种情况,分别为欠阻尼、临界阻尼和过阻尼。
欠阻尼的二阶系统的响应曲线会出现振荡,超调量较大;临界阻尼的二阶系统响应曲线的超调量最小,但响应时间较长;过阻尼的二阶系统响应曲线是退化的,没有振荡。
在实验中,我们使用计算机模拟二阶系统,并通过输入一个单位阶跃信号,观察系统的响应特性。
具体操作步骤如下:1. 在仿真软件中建立一个二阶系统,可以让仿真软件自动生成一个简单的二阶系统。
2. 将系统设置为单位阶跃信号输入,运行仿真,观察系统的响应特性。
3. 记录系统的超调量、响应时间以及稳态误差等参数。
4. 在仿真软件中改变系统的参数,例如增加阻尼系数,观察系统的响应变化。
实验器材:1. 计算机2. 仿真软件实验步骤:1. 打开计算机,并运行仿真软件。
2. 在仿真软件中建立一个二阶系统,并设置其为单位阶跃信号输入。
3. 运行仿真,并记录系统的响应特性,包括超调量、响应时间以及稳态误差等参数。
4. 在仿真软件中改变系统的参数,例如增加阻尼系数,观察系统的响应变化,并记录变化后的参数。
5. 分析实验结果,并总结出二阶系统的阶跃响应特性。
实验结果:在实验中,我们使用了仿真软件模拟了一个简单的二阶系统,并进行了阶跃响应实验。
通过实验,我们观察到了系统的响应特性,并记录了系统的超调量、响应时间以及稳态误差等参数。
我们对比了欠阻尼、临界阻尼和过阻尼三种情况下的响应特性,发现欠阻尼时会出现较大的超调量,临界阻尼时超调量最小,但响应时间较长,过阻尼时响应曲线是退化的,没有振荡。
二阶系统的阶跃响应
由于实际响应曲线的收敛速度比包络线的收敛速度要快, 因此可用包络线代替实际响应来估算调节时间。即认为响应曲 线的包络线进入误差带时,调整过程结束。
当t=t’s时,有:
e nts %
1 2
C(t)
1 1 1 2 e nt 1 1 2
1
Δ=5
ln( 1 2 %)
ts
tr
1
d
tg 1(
1 2
)
tg1( 1 2 ) tg1( 1 2n )
n
tg( ) n
1 2
n
tg1( 1 2 )
1 2
tr
d
n 1 2
称为阻尼角,这是由于 cos 。
20
n
n
jn 1 2
180
jn 1 2
3.3 二阶系统的阶跃响应
c(t) 1
1
e e ( 2 1)nt
( 2 1)nt
2 2 1 ( 2 1) ( 2 1)
特征方程还可为
12
s2
2
ns
2 n
(s
1 )(s T1
1 T2
)
3.3 二阶系统的阶跃响应
两阶系统的瞬态响应
式中
T1
n (
1
2
1)
T2
n (
1
2
1)
这里 T1 T2
,
2 n
1 T1T2
3.3 二阶系统的阶跃响应
第三节 二阶系统的阶跃响应
1
3.3 二阶系统的阶跃响应
一、典型二阶系统的数学模型
由二阶微分方程描述的系统称为二阶系统。它在控制工程
中的应用极为广泛。许多高阶系统在一定的条件下,也可简化
二阶系统的阶跃响应-10页精选文档
实验一 一、二阶系统的阶跃响应 实验报告___系__专业___班级 学号___姓名___成绩___指导教师__一、实验目的1、学习实验系统的使用方法。
2、学习构成一阶系统(惯性环节)、二阶系统的模拟电路,分别推导其传递函数。
了解电路参数对环节特性的影响。
3、研究一阶系统的时间常数T 对系统动态性能的影响。
4、研究二阶系统的特征参数,阻尼比ξ和无阻尼自然频率n ω对系统动态性能的影响。
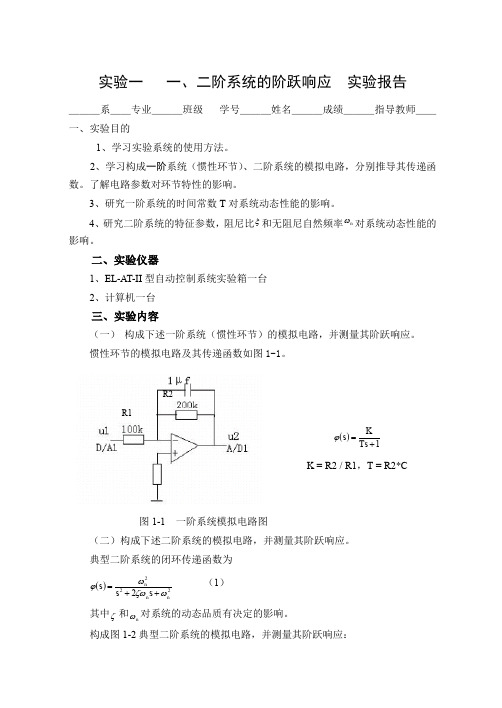
二、实验仪器1、EL-AT-II 型自动控制系统实验箱一台2、计算机一台三、实验内容(一) 构成下述一阶系统(惯性环节)的模拟电路,并测量其阶跃响应。
惯性环节的模拟电路及其传递函数如图1-1。
(二)构成下述二阶系统的模拟电路,并测量其阶跃响应。
典型二阶系统的闭环传递函数为()2222nn n s s s ωζωωϕ++=(1) 其中ζ和n ω对系统的动态品质有决定的影响。
构成图1-2典型二阶系统的模拟电路,并测量其阶跃响应:图1-1 一阶系统模拟电路图R1R2电路的结构图如图1-3系统闭环传递函数为式中 T=RC ,K=R2/R1。
比较(1)、(2)二式,可得 n ω=1/T=1/RCξ=K/2=R2/2R1 (3)由(3)式可知,改变比值R2/R1,可以改变二阶系统的阻尼比。
改变RC 值可以改变无阻尼自然频率n ω。
今取R1=200K ,R2=0K Ω,50K Ω,100K Ω和200K Ω,可得实验所需的阻尼比。
电阻R 取100K Ω,电容C 分别取1f μ和0.1f μ,可得两个无阻尼自然频率n ω。
操作步骤:1. 启动计算机,在桌面双击图标[自动控制实验系统]运行软件。
2. 测试计算机与实验箱的通信是否正常,通信正常继续。
如果信不正常查找原因使通信正常后才能可以继续进行实验。
3. 连接被测量典型环节的模拟电路(图1-1)。
电路的输入U1接A/D 、D/A卡的DA1输出,电路的输出U2接A/D 、D/A 卡的AD1输入。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验一 一、二阶系统的阶跃响应 实验报告___系__专业___班级 学号___姓名___成绩___指导教师__一、实验目的1、学习实验系统的使用方法。
2、学习构成一阶系统(惯性环节)、二阶系统的模拟电路,分别推导其传递函数。
了解电路参数对环节特性的影响。
3、研究一阶系统的时间常数T 对系统动态性能的影响。
4、研究二阶系统的特征参数,阻尼比ξ和无阻尼自然频率n ω对系统动态性能的影响。
二、实验仪器1、EL-AT-II 型自动控制系统实验箱一台2、计算机一台三、实验内容(一) 构成下述一阶系统(惯性环节)的模拟电路,并测量其阶跃响应。
惯性环节的模拟电路及其传递函数如图1-1。
(二)构成下述二阶系统的模拟电路,并测量其阶跃响应。
典型二阶系统的闭环传递函数为 ()2222nn n s s s ωζωωϕ++=(1) 其中ζ和n ω对系统的动态品质有决定的影响。
图1-1 一阶系统模拟电路图R1R2构成图1-2典型二阶系统的模拟电路,并测量其阶跃响应:电路的结构图如图1-3系统闭环传递函数为()()()()222/1//11/2TS T K s T s U S U s ++==ϕ 式中 T=RC ,K=R2/R1。
比较(1)、(2)二式,可得 n ω=1/T=1/RCξ=K/2=R2/2R1 (3)由(3)式可知,改变比值R2/R1,可以改变二阶系统的阻尼比。
改变RC 值可以改变无阻尼自然频率n ω。
今取R1=200K ,R2=0K Ω,50K Ω,100K Ω和200K Ω,可得实验所需的阻尼比。
图1-2 二阶系统模拟电路图图1-3 二阶系统结构图R2电阻R取100KΩ,电容C分别取1fμ和0.1fμ,可得两个无阻尼自然频率ω。
n 操作步骤:1.启动计算机,在桌面双击图标[自动控制实验系统]运行软件。
2.测试计算机与实验箱的通信是否正常,通信正常继续。
如果信不正常查找原因使通信正常后才能可以继续进行实验。
3.连接被测量典型环节的模拟电路(图1-1)。
电路的输入U1接A/D、D/A卡的DA1输出,电路的输出U2接A/D、D/A卡的AD1输入。
检查无误后接通电源。
4.在实验课题窗口中单击选择实验一[典型环节阶跃响应],5.鼠标双击实验课题弹出实验课题参数窗口。
在参数窗口中设置响应的实验参数后,鼠标单击确认等待屏幕显示去显示实验结果。
6.观测计算机屏幕显示出的响应曲线及数据。
7.记录波形及数据于表1-1。
8.关闭电源,拆线。
9.测试计算机与实验箱的通信是否正常,通信正常继续。
如果信不正常查找原因使通信正常后才能可以继续进行实验。
10.连接被测量典型环节的模拟电路(图1-2)。
电路的输入U1接A/D、D/A卡的DA1输出,电路的输出U2接A/D、D/A卡的DA1输入。
检查无误后接通电源。
11.在实验课题窗口中单击选择实验二[二阶系统阶跃响应]。
鼠标双击实验课题弹出实验课题参数窗口。
在参数窗口中设置响应的实验参数后,鼠标单击确认等待屏幕显示区显示实验结果。
12.观测计算机屏幕显示出的响应曲线及数据。
13.记录波形及数据于表1-2。
四、实验结果与分析1.分析推导一阶系统的传递函数2.记录一阶系统实验数据于表1-1,并计算Ts(秒)理论值。
表1-1 一阶系统实验数据记录表3.进行电路分析,推导得到二阶系统的传递函数。
4.记录二阶系统实验数据于表1-2 表1-2 二阶系统实验数据记录表5. 定量分析ξ和n ω与最大超调量P M 和调节时间s t 之间的关系。
6. 在实验过程中出现了什么问题?你是如何解决的?实验二 系统频率特性测量 实验报告___系__专业___班级 学号___姓名___成绩___指导教师__一、实验目的1、加深了解系统频率特性的物理概念。
2、掌握系统频率特性的测量分析方法。
二、实验仪器1、EL-AT-II 型自动控制系统实验箱一台2、计算机一台三、实验内容1、模拟电路图及系统结构图分别如图2-1和图2-2。
2、系统传递函数 取R3=500K Ω,则系统传递函数为()()()50010500122++==s S S U S U S G 若输入信号()t U t U ωsin 11=,则在稳态时,其输出信号为 ()()ψ+=t U t U ωsin 22改变输入信号角频率ω值,便可测得二组U2/U1和ψ和ω变化的数值,这个变化规律就是系统的幅频性和相频特性。
操作步骤图2-1 系统模拟电路图图2-2 系统结构图1.连接被测量典型环节的模拟电路。
电路的输入U1的A/D、D/A卡的DA1输出,电路的输出U2接A/D、D/A卡的AD1输入。
检查无误后接通电源。
2.启动计算机,在桌面双击图标[自动控制实验系统]运行软件。
3.测试计算机与实验箱的通信是否正常,通信正常继续。
如通信不正常查找原因使通信正常后才可以继续进行实验。
测波德图4.鼠标双击选中[实验课题→系统频率特性测量→可测性检查]菜单项,系统进行数据采集,等待观察波形,如图2-3所示。
分别取2~3组不同信源频率,记录系统输入输出波形并由图形计算幅频和相频特性。
5.待数据采样结束后鼠标双击[实验课题→系统频率特性测量→数据采集] 系统进行数据自动采集。
6.待数据采样结束后鼠标双击[实验课题→系统频率特性测量→波德图观测]即可在显示区内显示出所测量的波德图。
四、实验结果与分析1.进行电路分析,求出系统传递函数,根据传递函数绘制波德图。
图2-3 数据采集2.利用可测性检查工具,观察记录信源频率分别取不同值时系统输入及响应曲线,并由图形计算出系统幅频特性及相频特性。
实验三 连续系统串联校正 实验报告___系__专业___班级 学号___姓名___成绩___指导教师__一、实验目的1、加深理解串联校正装置对系统动态性能的校正作用。
2、对给定系统进行串联校正设计,并通过模拟实验检验设计的正确性。
二、实验仪器1、EL-AT-II 型自动控制系统实验箱一台2、计算机一台三、实验内容1、串联超前校正(1)系统模拟电路图如图3-1,图中开关S 断开对应未校情况,接通对应超前校正。
(2)系统结构图如图3-2图中 ()21=s Gc()1005.01055.022++=s s Gc 2、串联滞后校正图3-1 超前校正电路图图3-2 超前校正系统结构图(1)模拟电路图如图3-3,开关S 断开对应未校状态,接通对应滞后校正。
(2)系统结构图示如图3-4图中()101=s Gc()()1111102++=s s s Gc 操作步骤1、启动计算机,在桌面双击图标[自动控制实验系统]运行软件。
2、测试计算机与实验箱的通信是否正常,通信正常继续。
如通信不正常查找原因使通信正常后才可以继续进行实验。
超前校正3、连接被测量典型环节的模拟电路(图3-1)。
电路的输入U1接A/D 、D/A 卡的DA1输出,电路的输出U2接A/D 、D/A 卡的AD1输入。
检查无误后接通电源。
4、开关S 放在断开位置。
5、选中[实验课题→连续系统串联校正→超前校正]菜单项,鼠标单击将弹出参数设置窗口。
系统加入阶跃信号。
参数设置完成后鼠标单击确认测量系统阶跃响应,并记录超调量%σ和调节时间ts 。
6、开关S 接通,重复步骤5,将两次所测的波形进行比较。
并将测量结果记入表3-1中:图3-3 滞后校正模拟电路图图3-4 滞后系统结构图滞后校正7、连接被测量典型环节的模拟电路(图3-3)。
电路的输入U1接A/D、D/A卡的DA1输出,电路的输出U2接A/D、D/A卡的AD1输入。
检查无误后接通电源。
8、开关S放在断开位置。
9、选中[实验课题→连续系统串联校正→滞后校正]菜单项,鼠标单击将弹出参数设置窗口,系统加入阶跃信号。
参数设置完成后鼠标单标确认测量系统阶跃响应,并记录超调量%σ和调节时间ts。
10、开关S接通,重复步骤9,将两次所测的波形时行比较。
并将测量结果记入表3-2中:四、实验结果与分析1.记录的实验数据,分析校正前后系统性能。
表3-1表3-22.根据超前校正前后的系统传递函数,绘制超前校正前后系统的波德图,并从图上查出系统的幅值穿越频率ωc及相位裕度v。
分析校正结果。
实验四状态空间分析与设计实验报告___系__专业___班级学号___姓名___成绩___指导教师__一、实验目的1.加深理解能控性、能观性的概念及其判别准则。
2.运用状态反馈配置极点。
3.了解直线倒立摆系统的组成。
4.了解MATLAB的使用。
二、实验仪器二级倒立摆。
三、实验内容1.直线一级倒立摆的牛顿—欧拉方法建模。
2.分析得到直线一级倒立摆的状态空间方程。
3.研究一级倒立摆的能控性和能观性。
4.分析一级倒立摆的稳定性。
5.计算得到状态反馈阵,使一级倒立摆闭环极点位于-1+2j,-1-2j,-2+j,-2-j,画出模拟结构图。
6.演示二级倒立摆控制。
四、实验结果与分析1、写出直线一级倒立摆的状态空间方程。
2、使用MATLAB分析一级倒立摆的能控性和能观性。
3、用MA TLAB分析一级倒立摆稳定性。
4、计算得到状态反馈阵,使一级倒立摆闭环极点位于-1+2j,-1-2j,-2+j,-2-j,画出模拟结构图。
5、本次实验你有何收获?。