初中物理专题复习:杠杆详细讲解.
八年级物理《杠杆》精讲图文演示课件

等臂杠杆是一种简单机械,其动 力臂等于阻力臂,既不省力也不
费力。
等臂杠杆的实例
生活中常见的等臂杠杆有天平、定 滑轮等。
等臂杠杆的特点
等臂杠杆既不省力也不费力,但可 以改变力的方向,同样不能省功。
03
杠杆在生活中的应用
剪刀、钳子等工具中的应用
剪刀
利用杠杆原理,通过手柄施加力 使得刀刃张开或闭合,方便剪切 物体。
杠杆的应用实例分析
如天平、剪刀、镊子等。
拓展延伸:其他简单机械原理介绍
斜面
一种可以省力的简单机械,如盘山公路、螺丝钉 等。
轮轴
由轮和轴组成,能绕共同轴线旋转的简单机械, 如汽车方向盘、门把手等。
滑轮
分为定滑轮和动滑轮,可以改变力的方向或省力 ,如升旗装置、起重机等。
鼓励学生观察生活中更多简单机械应用实例
观察自行车上的简单机械应用
如车把是省力杠杆,脚踏板是轮轴等。
分析家庭中的简单机械
如门把手是轮轴,开瓶器是杠杆等。
THANKS
感谢观看
杠杆组成部分
支点、动力、阻力、动力 臂、阻力臂。
支点
杠杆绕着转动的点,用字 母O表示。
杠杆定义及组成部分
01
02
03
04
动力
使杠杆转动的力,用字母F₁表 示。
阻力
阻碍杠杆转动的力,用字母F₂ 表示。
动力臂
从支点到动力作用线的距离, 用字母l₁表示。
阻力臂
从支点到阻力作用线的距离, 用字母l₂表示。
钳子
钳口夹持物体时,通过手柄施加 力使得钳口闭合,实现物体的夹 持、固定或剪切。
天平、杆秤等测量工具中的应用
天平
天平是一种等臂杠杆,利用杠杆平衡 条件来测量物体的质量。当天平两端 所挂物体质量相等时,天平平衡。
九年级上杠杆知识点
九年级上杠杆知识点杠杆,是物体平衡时所使用的一种简单机械,是在支点或者力点施加力以改变物体的平衡状态或者移动物体的工具。
在学习物理的过程中,学生们也会接触到杠杆这一知识点。
本文将介绍九年级上学期涉及的杠杆相关知识,包括杠杆的定义、原理、分类以及相关计算方法。
一、杠杆的定义与原理杠杆是一种用于平衡力或者改变力的方向、大小或者点的位置的简单机械。
它由一个固定的支点和绕着支点旋转的杠杆臂组成。
根据杠杆臂与支点以及力的相对位置关系,杠杆可以实现力的放大、方向的改变以及力点的移动等功能。
杠杆原理是建立在力矩的平衡关系上的。
力矩是指力对物体产生的旋转作用,与力的大小和作用点到支点的距离有关。
根据力矩的平衡原理,杠杆上的力矩之和为零时,杠杆平衡。
这一原理被称为杠杆原理。
二、杠杆的分类根据杠杆支点与力的相对位置,杠杆可以分为三种类型:一类杠杆、二类杠杆和三类杠杆。
1. 一类杠杆:支点在杠杆两端,力作用在支点两端的杠杆称为一类杠杆。
在一类杠杆中,当作用力和力臂相等时,杠杆平衡。
2. 二类杠杆:支点在杠杆一端,力作用在另一端的杠杆称为二类杠杆。
在二类杠杆中,当作用力和力臂不等时,杠杆可以平衡,而且可以实现力的放大。
3. 三类杠杆:支点在杠杆一端,力作用在支点和旋转点之间的杠杆称为三类杠杆。
在三类杠杆中,力臂始终较大,所以它无法实现力的放大,但可以改变力的方向。
三、杠杆的计算方法杠杆是一种通过力臂和力的乘积来平衡或者改变力的作用的工具。
因此,在运用杠杆时,我们需要了解与杠杆相关的计算方法。
1. 力矩计算:力矩是指力对物体产生的旋转作用,可通过力乘以力臂(即力到支点的距离)来计算。
力矩的单位是牛顿·米(N·m)。
2. 转动平衡条件计算:根据杠杆原理,当杠杆平衡时,力矩之和为零。
通过将力臂乘以力的大小计算力矩,然后对所有力矩进行求和,如果总和等于零,则杠杆平衡。
3. 力的放大计算:在二类杠杆中,如果力臂较大,即支点到力的距离较大,那么单位力就可以放大为更大的力。
八年级物理下册-杠杆(知识解读)(解析版)
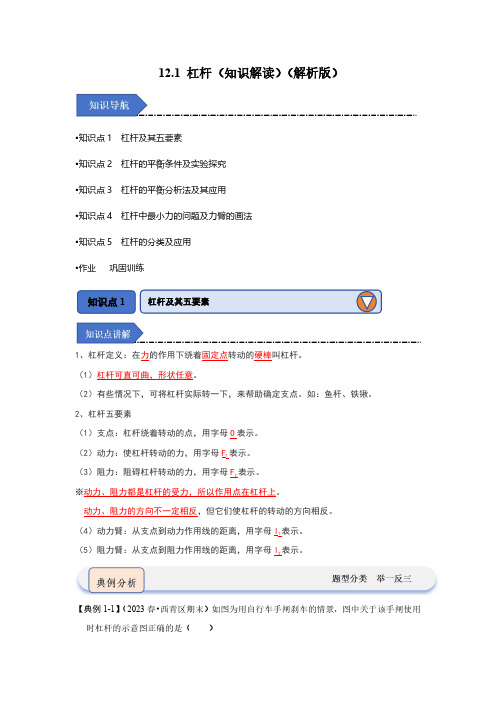
12.1杠杆(知识解读)(解析版)•知识点1杠杆及其五要素•知识点2杠杆的平衡条件及实验探究•知识点3杠杆的平衡分析法及其应用•知识点4杠杆中最小力的问题及力臂的画法•知识点5杠杆的分类及应用•作业巩固训练1、杠杆定义:在力的作用下绕着固定点转动的硬棒叫杠杆。
(1)杠杆可直可曲,形状任意。
(2)有些情况下,可将杠杆实际转一下,来帮助确定支点。
如:鱼杆、铁锹。
2、杠杆五要素(1)支点:杠杆绕着转动的点,用字母O 表示。
(2)动力:使杠杆转动的力,用字母F 1表示。
(3)阻力:阻碍杠杆转动的力,用字母F 2表示。
※动力、阻力都是杠杆的受力,所以作用点在杠杆上。
动力、阻力的方向不一定相反,但它们使杠杆的转动的方向相反。
(4)动力臂:从支点到动力作用线的距离,用字母l 1表示。
(5)阻力臂:从支点到阻力作用线的距离,用字母l 2表示。
【典例1-1】(2023春•西青区期末)如图为用自行车手闸刹车的情景,图中关于该手闸使用时杠杆的示意图正确的是()杠杆及其五要素知识点1A.B.C.D.【答案】A【解答】解:BD、由图知,阻力臂没有垂直于阻力作用线,故BD错误;AC、由图知,动力垂直于动力作用线,阻力也垂直于阻力作用线,C图中动力和阻力都使杠杆逆时针转动,A图中动力和阻力使杠杆转动的方向相反,故C错误,A正确。
故选:A。
【典例1-2】(2023春•吉安县期末)用如图所示的“开瓶起子”开瓶盖,A、B两点中A 点是支点,开瓶盖时在C点处施加向上(选填“向上”或“向下”)的力。
【答案】A;向上。
【解答】解:用如图所示的“开瓶起子”开瓶盖,A、B两点中A点是支点,起子绕着转动的固定点,B点是阻力的作用点,开瓶盖时在C点处施加向上的动力。
故答案为:A;向上。
【变式1-1】(2023春•固始县期末)关于杠杆,下列说法中正确的是()A.杠杆一定是一根直的硬棒B.杠杆的支点一定在杠杆上,且在杠杆的中间位置C .作用在杠杆上的动力一定与杠杆的阻力方向相反D .力臂可能在杠杆上也可能不在杠杆上【答案】D【解答】解:A 、杠杆的形状不是固定的,例如滑轮、剪刀、筷子等都是杠杆,故A 错误;B 、支点指杠杆在转动过程中固定不变的点,不一定在杠杆的中间位置,故B 错误;C 、当支点位于一侧时,动力和阻力的方向相反,当支点位于中间时,动力和阻力方向相同,故C 错误;D 、力臂不一定是杠杆的长度,力臂可能在杠杆上也可能不在杠杆上,故D 正确。
初中物理杠杆知识点汇总

初中物理杠杆知识点汇总
1、一根硬棒,在力的作用下能绕着固定点转动,这根硬棒就是杠杆。
支点——杠杆绕着转动的点;动力——使杠杆转动的力;阻力——阻碍杠杆转动的力;动力臂——从支点到动力作用线的距离;阻力臂——从支点到阻力作用线的距离。
当杠杆在动力和阻力作用下静止时,我们就说杠杆平衡了。
2、杠杆的平衡条件:动力×动力臂=阻力×阻力臂或F1L1=F2L2
3、杠杆的应用
省力杠杆:L1>L2F1<F2省力费距离;
费力杠杆:L1<L2F1>F2费力省距离;
等臂杠杆:L1= L2F1= F2不省力、不省距离,能改变力的方向。
等臂杠杆的具体应用:天平。
许多称质量的秤,如杆秤、案秤,都是根据杠杆原理制成的。
九年级上册杠杆知识点
九年级上册杠杆知识点杠杆知识点杠杆是物理学上的一个基本概念,指的是用于放大力量或改变物体运动方向的工具。
在九年级的物理学中,我们将要学习关于杠杆的知识点。
本文将介绍九年级上册物理课程中涉及到的几个重要的杠杆知识点。
一、什么是杠杆杠杆是由一个支点和用于施加力的杠臂组成的简单机械。
在杠杆的运作过程中,我们可以通过施加较小的力量,来产生较大的力量输出。
在杠杆中,有三个重要的要素:支点、力臂和载荷。
支点是杠杆的旋转点,力臂是从支点到力的作用点的距离,载荷是受到力作用的物体。
二、杠杆的类型根据支点的位置不同,杠杆可以分为三种类型:第一类杠杆、第二类杠杆和第三类杠杆。
1. 第一类杠杆:支点位于力臂和载荷之间。
这意味着我们可以用杠杆使力的方向发生变化。
例如,我们可以用杠杆将向下的力作用转变为向上的力作用。
2. 第二类杠杆:支点位于力臂和力之间。
这种杠杆可以放大力的输出,使我们能够用较小的力来提供较大的力输出。
桨就是第二类杠杆的一个例子。
3. 第三类杠杆:支点位于力和力臂之间。
这种杠杆对提供较大的力输出不太有效,但可以提供较大的力速度。
拖拉机的刹车踏板就是一个第三类杠杆的例子。
三、杠杆的原理杠杆原理是指杠杆的受力平衡关系。
在杠杆平衡时,支持弯曲时产生的力矩之和为零。
力矩是指由力和力臂之间的乘积产生的转动效果。
根据杠杆的原理,当一个较大的力作用于一个较小的力臂上时,可以产生一个相对较小的力作用在较大的力臂上。
这就解释了为什么可以通过杠杆来放大力量。
四、杠杆的应用杠杆在我们的日常生活中有很多应用。
以下是几个常见的例子:1. 牙科钳:牙科钳是一种使用第一类杠杆原理的工具。
这种工具利用了杠杆的力量,使牙科医生可以轻松地拔掉牙齿。
2. 剪刀:剪刀也是使用第一类杠杆原理的工具。
剪刀的双臂可以通过杠杆放大力量,使我们可以轻松地剪断各种材料。
3. 铁锤:铁锤是一种使用第二类杠杆原理的工具。
将力应用在较远的地方,我们可以用相对较小的力来敲打物体。
九年级物理八下杠杆知识点
九年级物理八下杠杆知识点杠杆是我们日常生活中常见的物理现象之一。
无论是搬运重物还是开启门窗,杠杆都扮演着重要的角色。
在物理学中,杠杆是一种能够实现力的放大或缩小的简单机械装置。
在九年级物理八下的学习中,我们将深入探索杠杆的原理和应用。
一、杠杆的定义与概念杠杆是由一个固定点(支点)和两个力臂组成的简单机械装置。
支点处的力臂称为“支臂”,与力的作用方向垂直,另一侧的力臂称为“力臂”,与力的作用方向平行。
二、杠杆的原理杠杆原理指出,当一个杠杆在平衡状态下,力的矩(力乘以力臂)相等。
这意味着,如果一个力通过较小的力臂施加在一个物体上,相应地必须通过较大的力臂施加另一个力才能实现平衡。
这一原理可以用公式表达为:F1 × l1 = F2 × l2,其中F1和F2分别为两个力的大小,l1和l2分别为其所对应的力臂长度。
三、一级杠杆一级杠杆指的是支点位于力的中间的杠杆。
通常,一级杠杆的力臂和支臂长度相等,这意味着施加在支臂上的力和施加在力臂上的力是相等的。
四、二级杠杆二级杠杆指的是支点位于力的一侧的杠杆。
在二级杠杆中,力臂和支臂的长度不相等。
由于力臂较长,所以所需的力会更小。
这种杠杆常用于实现力的放大效果,例如撬棍。
五、三级杠杆三级杠杆指的是支点位于力的另一侧的杠杆。
在三级杠杆中,力臂较短,因此需要施加更大的力才能实现平衡。
这种杠杆常用于实现力的缩小效果,例如钳子。
六、杠杆的应用杠杆在日常生活中得到广泛应用。
举个例子,开门就是一个杠杆的应用。
门的铰链处充当支点,人施加的力通过较大的力臂作用在门上,使得门可以轻松打开。
类似地,拧开瓶盖、掰开坚果壳等操作也都是基于杠杆原理。
除了日常生活,杠杆在工程与工业领域也有着广泛的应用。
例如建筑工地中的起重机构、机械设备中的摩擦力控制、汽车发动机的活塞运动等等都涉及到杠杆的运用。
七、杠杆的优势与劣势尽管杠杆在力的放大和缩小方面提供了巨大的便利,但它也存在一些限制。
初中物理杠杆专题复习

初中物理-杠杆专题复习————————————————————————————————作者: ————————————————————————————————日期:ﻩ杠杆与滑轮知识点总结:1、杠杆五要素:①支点:杠杆绕着转动的点②动力:使杠杆转动的力③阻力:阻碍杠杆转动的力④动力臂:从支点到动力作用线的垂直距离⑤阻力臂:从支点到阻力作用线的垂直距离2、杠杆平衡条件(杠杆平衡原理):动力×动力臂=阻力×阻力臂,F1·L1=F2·L2。
F1表示动力,L1表示动力臂,F2表示阻力,L2表示阻力臂3、定滑轮:工作时,中间的轴固定不动的滑轮叫定滑轮。
(实质是等臂杠杆)特点:不能省力,但能改变力方向动滑轮:工作时,轴随着一起移动的滑轮叫动滑轮。
(实质是个动力臂为阻力臂二倍的杠杆)特点:可以省力,但不改变力的方向滑轮组:由若干个定滑轮和动滑轮组合在一起例2.解:例3 C例4功与功率1、功的定义:力与物体在力的方向上通过的距离,公式:w=f*l,单位J2、功率:单位时间内所做的功,公式:P=w/t,单位:瓦特,符号w3、功:①有用功:有目的而做的功②无用功:并非我们的目的但是不得不做的功4、机械效率:有用功与总功的比值例1如图所示,物体A的重力是500N,物体A所受地面的摩擦力是重力的0.2倍,拉力F的大小为40N,求此装置的机械效率及滑轮的重。
(不计绳重和绳与滑轮间的摩擦)解:物体A 所受地面摩擦力 f = 0.2G = 100N,当物体移动距离为S 时,绳子的自由端移动距离为___ )(31滑G f F += 得:G 滑=3F - f=20N 例2 图甲是建筑工地上常见的塔式起重机示意图。
这种起重机主要用于房屋建筑施工中物料的竖直或水平输送。
某塔式起重机是通过电动机带动如图乙所示滑轮组竖直起吊物料的。
已知起吊重为3×104N 的物料时,电动机的输出功率为60kW,物料匀速上升的速度为1.5m/s 。
物理九年级杠杆总结知识点

物理九年级杠杆总结知识点一、杠杆的基本概念1.杠杆的定义杠杆是一种用来传递力的简单机械装置,它由一个杆和一个支点构成,通过对杆的旋转运动来实现力的传递。
在杆的两端分别施加力来实现对物体的移动或支撑。
2.杠杆的分类根据支点的位置和力的作用方式,杠杆可以分为一级杠杆、二级杠杆和三级杠杆。
一级杠杆的支点在杆的一端,力和物体在另一端,二级杠杆的支点位于杆的中间,力和物体位于两端,三级杠杆的支点在杆的一端,力和物体位于另一端。
3.力臂和力臂矩杠杆的力臂是力作用点到支点的距离,力臂矩是力与力臂的乘积,表示力的偏转能力。
力臂的长度和力的大小都会影响力臂矩的大小。
4.力矩平衡条件力矩平衡条件是指在杠杆平衡状态下,总的力矩为零。
这一条件可以用来解决杠杆平衡问题,即通过平衡条件计算出未知力的大小。
二、一级杠杆的平衡条件1.一级杠杆的平衡条件在一级杠杆平衡状态下,力矩平衡条件可以表示为F1L1=F2L2,其中F1和F2分别是力的大小,L1和L2分别是力臂的长度。
这一条件可以用来解决一级杠杆平衡问题,即通过已知力和力臂长度计算出未知力的大小。
2.一级杠杆的应用一级杠杆广泛应用于人类的日常生活中,比如开门、拆卸物体等,都可以利用一级杠杆原理来减小力的大小,实现力的放大和方向的改变。
三、二级和三级杠杆的平衡条件1.二级和三级杠杆的平衡条件在二级和三级杠杆平衡状态下,同样可以使用力矩平衡条件来解决平衡问题。
但是由于力和力臂的关系更加复杂,计算过程会更加繁琐。
2.二级和三级杠杆的应用二级和三级杠杆在实际生活中的应用并不多见,主要应用于一些特殊工程和科学研究领域。
由于它们的复杂性,使用时需要更加注意力臂和力的关系,确保力矩平衡条件得到满足。
四、杠杆的原理和应用1.杠杆的原理杠杆原理是物理学中的基本原理之一,它可以用来解决对物体施加力的问题。
通过杠杆原理,可以实现对物体的移动和支撑,以及实现力的放大和方向的改变。
2.杠杆在工程和科学研究中的应用杠杆在工程和科学研究中有着广泛的应用,比如重力悬臂梁、摇摆梁、振荡杆等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
提问: 你的实验结论与你的假设一致吗? 你的结论是什么?
杠杆的平衡条件:
动力χ动力臂=阻力χ阻力臂
F1· L1=F2· L2
杠杆的平衡条件:
动力χ动力臂=阻力χ阻力臂
F1· L1=F2· L2
F1 F2 = L2 L1
如图是铁道检修工用的道钉撬,有关尺寸见 图。若在 A点竖直向下 作用200牛的力,道钉撬 对道钉会产生多大 A 的力?如果还不能 将道钉撬出,在保 F1 持手的作用力大小 200牛 和作用点不变的情 O 况下,采用什么方 法可增大道钉撬对 1.2米 道钉的作用力? F2 6厘米
甲 次 数 动 力 4 3 动力臂
组 阻 力 5 4 阻力臂
乙 组 动力 动力臂 阻力 阻力臂
1 2 3
5 4
4 3
7 6 4
4 4 5
2 8 2
14 3 10
结 动力+动力臂=阻力+阻力臂 论
动力×动力臂=阻力×阻力臂
实验数据表格设计
实验 动力 动力臂 阻力 阻力臂 F L F L 1 1 2 2 F2/N l2/cm 次数 F1/N l1/cm 1 2 3
F1
F2
l2
O
l1
F1
F2
F1
l1 l2F1l2F2 Nhomakorabeal1
专题二:杠杆平衡 条件的应用
当杠杆在动力和阻力的作用下,保持静止 状态或匀速转动状态,我们就说杠杆处于平 衡。
探究杠杆的平衡条件
讨论: 在实验前,是否也要调节杠杆在水平位置 平衡?为什么?
实验前,使杠杆在水平 位置平衡,为了避免杠杆 自身的重力对杠杆平衡的 影响。
L1>L2
F1<F2
(动力<阻力)
费力杠杆
L1<L2
F1>F2
(动力>阻力)
等臂杠杆
L1=L2
(动力=阻力)
F1=F2
将下列杠杆分类
等臂杠杆
省力杠杆
费力杠杆
杠杆的分类
请对下列应用的杠杆进行分类:
费力杠杆
费力杠杆
省力杠杆
省力杠杆
费力杠杆
费力杠杆
生活·物理·社会
生活中的剪刀
思考:什么情况下,人们会选用费力杠杆? 使用费力杠杆有什么好处? 当阻力比较小时,人们会选用费力杠杆。 使用费力杠杆会省距离,很方便。
2 猜想与假设:
假设一: F1+L1=F2+L2 假设二: F1–L1=F2–L2
假设三: F1/L1=F2/L2 假设四: F1 ·L1=F2 ·L2
甲乙两个实验小组在探究“杠杆 的平衡条件”时,分别得到下面 两组数据和结论。 他们在交流时,甲组发现了自己 实验结论的错误和产生错误的原 因。你认为甲组产生错误的原因:
杠杆绕着转动的固定点 : 支 点( O) 使杠杆转动的力: 动 力(F1) 阻碍杠杆转动的力: 阻 力(F2)
a.一根硬棒要成为杠杆,应该具备两 个条件: 1.要有力的作用; 2.能绕某固定点转动。 两条件缺一不可。如:撬啤酒瓶盖的 起子在不用时, 就不能称为杠杆;受了 力没绕某固定点转动起来也不是杠杆. b.杠杆的形状可以是直的也可是弯的, 但必须是硬的。 c.支点可在杠杆的中间,也可在杠杆 的一端,也可在杠杆的其他位置
生活和生产中的杠杆(1)
生活和生产中的杠杆(2)
力臂
比较下图(1)和(2)、(1)和(3)你一定会有发现!
(1)
(2)
(3)
用力的方向和作用点的变化 力到支点的距离发 生了变化 转动杠杆的力的大小也发生变化。
1、从支点0到动力F1作用线 的距离叫动力臂: L1 力臂
2、从支点0到阻力F2作用线 的距离叫阻力臂: L2
力臂的作图方法: 一.找出力的方向 二.沿力的方向画出力的作 用线 三.过支点作出作用线的垂 线段
杠杆五要素
支 点( O) 动 力(F1) 阻 力(F2) 动力臂(L1 ) 阻力臂( L2 )
画力臂的方法:
一找(找准支点) 二画(画出力的作用线) 三引(引垂线) 四标(标垂足---直角符号、 标力臂---支点到垂足的距离 )
如图所示,某同学在做俯卧撑运动。可将他视为一 个杠杆。他的重心在A点,重力为500牛,那么他将身 300牛 。若他在1 体撑起,双手对地面的压力至少___ 分钟内做了30个俯卧撑,每次肩部上升的距离均为 60 0.4米,则他的功率至少为___瓦。
结束
专题三:杠杆分类
杠杆类型 杠杆特点 省力杠杆
我们来完整分解 杠杆的五个要素 的作图方法
L1
O L2
F2
F1
1、什么叫杠杆 2、杠杆的五要素: 支点 动力 动力臂 阻力 阻力臂 3、标出杠杆的五要素
o
◎
L2
画力臂的方法:
一找(找准支点)
L1
二画(画出力的作用线) 三引(引垂线)
F2
四标(标垂足---直角符号、 标力臂---支点到垂足的距离 )
思考与讨论
★ 杠杆两端有两只可调节的螺母,能 起什么作用?
★作用:调节杠杆自身的平衡
※ 为什么要求杠杆静止时,在水平位置呢?
※能在杠杆上直接读出力臂的大小
★ 杠杆调平的方法是什么? ★ “左高左调、右高右调”
杠杆在什么条件下平衡?
L1
L2
杠杆
o
F2
F1
平衡 螺母
实验探究:杠杆的平衡条件
杠杆平衡时,动力、动力臂、阻力、 1 提出问题: 阻力臂之间存在着怎样的关系?
专题一:杠杆作图
专题二:杠杆平衡条件的应用 专题三:杠杆分类问题
专题四:最小力问题
专题五:杠杆中的动态分析
专题一:杠杆作图
认识杠杆
我们先来看一 段动画片:
这根撬起石头的木棒就是杠杆!
看看想想: 左图的羊角锤 和上面这根撬 起石头的木棒 有何相同点?
O
F1
杠杆的定义:
一根硬棒,在力的作用下能绕着固定点转 动,这根硬棒就是杠杆. 它包含了三个基本的要素:
C
D
: 探究 时的注意事项
1、一般情况下,一个杠杆在静止 (或者匀速转动)时,我们就说 此时杠杆处于平衡状态。 2、要尽量让杠杆在水平位置平衡。 为什么? (因为杠杆在水平位置平衡时,力 臂就在平衡尺上,便于测量.) 3、左边钩码的重力我们当做阻力F2, 右边钩码的重力我们当做动力F1, 4、为了让探究结果具有普遍性,改 变钩码重和两边的距离做三次实验
杠杆类型 杠杆优点 省力杠杆 省力
杠杆缺点 费距离
费力杠杆 省距离
费力
等臂杠杆 既不省力也不省距离
如图,杠杆的应用例子中费力杠杆是( C) 方法一:力臂长短比较法
A
B
C
D
如图,杠杆的应用例子中省力杠杆是( A )
方法二:作用点移动距离比较法
A
C
D B
专题四:求最小力问题
如图所示,曲杆AOBC自重不计,O为支点,AO= 60cm,OB=40cm,BC=30cm,要使曲杆在水平位 置平衡,请在C处作出施加最小的动力F1的示意图 及其力臂l1。