第二章平面桁架有限元及程序设计案例
第二章桁架结构的有限元
2-8 计算杆件内力
计算出单元节点位移{ 计算出单元节点位移 ui,vi,uj,vj}T,可计算出单元两端的 节点力和内力。 节点力和内力。 轴向力: 轴向力:
1 Ui 0 0 EA = lu i 0 0 0 v i u j 0 1 0 0 0 0 v j
1、建立如图所示的杆系结构; 、建立如图所示的杆系结构; 2、定义单元类型:LINK1 、定义单元类型: 3、定义材料弹性模量EX 、定义材料弹性模量 4、定义实常数:杆的截面积0.01 、定义实常数:杆的截面积 5、划分网格:一个杆为一个单元 、划分网格: 6、定义约束 、 7、施加载荷 、 8、进行求解 、 9、观察变形图、列出节点位移值 、观察变形图、
δ (-4,3) 2 ① 3 (0,5) 4 (4,3)
②
③ EA=5e6N 1 P=1000N x
采用ANSYS 分析,计算节点的位移、反作用力和桁架系 统的应力。 几何参数及载荷如图3-10所示,杆的弹性模量E 为200Gpa, 横截面面积A 为3250mm2。
图3-10桥梁桁架模型
2-7添加约束 求解方程 添加约束
约束条件2:节点 水平位移为 水平位移为u 约束条件 :节点n水平位移为 n=un*≠0: : 在整体刚度矩阵K中 在整体刚度矩阵 中,与un相对应的行与列中主对角线元 乘以一个大数A,在右边向量F中 素K2n-1,2n-1乘以一个大数 ,在右边向量 中,与un相对应 的行元素改为AK2n-1,2n-1 un*,其他元素不变 ; 的行元素改为 经过这样修改后的位移法基本方程 K *δ = F * 可解出节 点位移δ 点位移
2-2
坐标转换的概念
在用有限元法计算中,第一步是将结构离散 在用有限元法计算中, 将结构离散成有限个单元, 化,将结构离散成有限个单元,一般一个杆 作为一个单元;在该单元的坐标系( 作为一个单元;在该单元的坐标系(局部坐 标系)中建立单元刚度矩阵, 标系)中建立单元刚度矩阵,所有的单元刚 度矩阵(局部坐标系下) 度矩阵(局部坐标系下)需要整和成总体刚 度矩阵(整体坐标系下),即每个单元对整 度矩阵(整体坐标系下),即每个单元对整 ), 体的贡献, 体的贡献,在整和过程中需要根据局部坐标 系与整体坐标系之间的关系( 系与整体坐标系之间的关系(称为坐标转换 矩阵)进行坐标转换。 矩阵)进行坐标转换。
桁架和梁的有限元分析.
第9章桁架和梁的有限元分析第1节基本知识一、桁架和梁的有限元分析概要1.桁架杆系的有限元分析概要桁架杆系系统的有限元分析问题是工程中最常见的结构形式之一,常用在建筑的屋顶、机械的机架及各类空间网架结构等多种场合。
桁架结构的特点是,所有杆件仅承受轴向力,所有载荷集中作用于节点上。
由于桁架结构具有自然离散的特点,因此可以将其每一根杆件视为一个单元,各杆件之间的交点视为一个节点。
2.梁的有限元分析概要梁的有限元分析问题也是是工程中最常见的结构形式之一,常用在建筑、机械、汽车、工程机械、冶金等多种场合。
梁结构的特点是,梁的横截面均一致,可承受轴向、切向、弯矩等载荷。
根据梁的特点,等截面的梁在进行有限元分析时,需要定义梁的截面形状和尺寸,用创建的直线代替梁,在划分网格结束后,可以显示其实际形状。
二、桁架和梁的常用单元桁架和梁常用的单元类型和用途见表9-1。
表9-1 桁架和梁常用结构实体单元列表通过对桁架和梁进行有限元分析,可得到其在各个方向的位移、应力并可得到应力、位移动画等结果。
第2节 桁架的有限元分析实例一、案例1——2D 桁架的有限元分析图9-1 人字形屋架的示意图问题 人字形屋架的几何尺寸如图9-1所示。
杆件截面尺寸为0.01m 2,试进行静力分析,对人字形屋架进行静力分析,给出变形图和各点的位移及轴向力、轴力图。
条件人字形屋架两端固定,弹性模量为2.0×1011 N/m 2,泊松比为0.3。
解题过程制定分析方案。
材料弹性材料,结构静力分析,属2D 桁架的静力分析问题,选用Link1单元。
建立坐标系及各节点定义如图9-1所示,边界条件为1点和5点固定,6、7、8点各受1000 N 的力作用。
1.ANSYS 分析开始准备工作(1)清空数据库并开始一个新的分析 选取Utility>Menu>File>Clear & Start New ,弹出Clears database and Start New 对话框,单击OK 按钮,弹出V erify 对话框,单击OK 按钮完成清空数据库。
第二章 第四节 平面静定桁架内力的计算标准版文档
桁架静力分析 简化计算模型
节点
杆件
节点
杆件
节点
杆件
节点
杆件
桁架静力分析 静力分析的基本方法
节
以节点为平衡对象;
点
节点力的作用线已知, 指向可以假设;
法
不仅可以确定各杆受
力,还可以确定连接
件的受力。
桁架静力分析 静力分析的基本方法
指向可以假设;
节点法 用假想截面将桁架截开;
桁架静力分析 静力分析的基本方法
节点法
例 题
以节点为平衡对象,画出受力图:
FA B FA D
FC y
FB A
F BC FB D
FC B FC D
FC x
FD B FD C
FD A
指向节者点为压力;
FD y 背向节者点为拉力。
桁架静力分析 静力分析的基本方法
FC x = 0 , FC y = - 800 N , FD y = 2600 N 。
指向可以假设; 工程中由杆件通过焊接、铆接 直接求得杆件的内力,进
节点力的作用线已知, 工程中由杆件通过焊接、铆接
不仅可以确定各杆受
例 直接求得杆件的内力,进
平面简单桁架的内力计算 工程中由杆件通过焊接、铆接
用假想截面将桁架截开; 用假想截面将桁架截开; 力,还可以确定连接
题 指向可以假设;
桁架静力分析 静力分析的基本方法
用假想截面将桁架截开;
不仅可以确定各杆受
节点力的作用线已知,
截 工程中由杆件通过焊接、铆接
工程中由杆件通过焊接、铆接
以节点为平衡对象,画出受力图:
以节点为平衡对象,画出受力图:
用假想截面将桁架截开;
弹性力学与有限元分析第二章-平面桁架有限元分析及程序设计

x
由单元①的刚度方程:
Fj
①
k
① ji
i
①
k
① jj
j
①
k
① ji
2
k
① jj
1
由单元③的刚度方程:
Fj
③
k
③ ji
i
③
k
③ jj
j
③
k
③ ji
3
k
③ jj
1
§2.3 结点平衡与整体刚度矩阵的集成
代入结点1的平衡条件:
k
l
xi
)
(dx j
dxi
)
(
yj
l
yi )
(dy j
dyi )
(dx j dxi ) (dy j dyi )
cos sin
由于杆件的变形产生位移:
ui dxi vi dyi
u j dxj v j dy j
因此,杆件应变为:
dl l
l
(ui
uj)
l
(vi
vj)
杆件轴力为:
(2k1 k2 )v4 P
结构的整体刚度系数
v4
P 2k1
k2
12 3
l2 l1 l1
4 P
N1
N1y
cos
k1v4
cos
k1P
(2k1 k2 ) cos
N2
k2v4
k2P 2k1 k2
位移法求解超静定结构。
§2.1 平面桁架单元的离散
结构的离散化:尽量将结构离散成数量最少的等截面直 杆单元
kki③ ③jii
ki③j
k
③ jj
3 3 3 3
§2.3 结点平衡与整体刚度矩阵的集成
有限元分析 ansys 桁架.ppt
整体位移和局部位移之间的关系为:
UiX uix cos uiy sin UiY uix sin uiy cos U jX u jx cos u jy sin U jY u jx sin u jy cos
将以上方程写成矩阵形式有: U T u
0 0 0
0 k 0
0
0 0
uiy
u jx
u jy
其中
k keq
AE L
,写成矩阵形式: f K u
将 f 和 u替换成 F和 U ,有:
T 1F K T 1U
其中 T 1是变换矩阵 T 的逆矩阵,为:
FjY
k
sin
cos
cos2
sin cos
sin cos sin2
sin cos sin2
cos2 sin cos
cos2 sin cos
sin cos UiX
sin2 sin cos
U和u分别代表整体XY坐标和局部xy参考系下节点i和j的
位移。T 是从局部变形转化到整体变形的变换矩阵。
类似地,局部力和整体力之间有以下关系:
FiX fix cos fiy sin FiY fix sin fiy cos FjX f jx cos f jy sin FjY f jx sin f jy cos
L
E 在弹性区域,应力和应变服从虎克定律:
由以上三个方程我们得到:
F
AE L
L
所得方程和线性弹簧的方程 F kx 很相似。因此, 统一横截面的中心受力的杆建模时可以有如下刚度的弹簧:
2D四杆桁架结构的有限元分析实例

2D四杆桁架结构的有限元分析实例2D四杆桁架结构是一种常见的结构形式,广泛应用于工程领域。
在进行结构设计和分析时,有限元分析是一种常用的方法,可以对结构进行力学性能和应力分布的分析。
下面将以一个具体的例子来介绍2D四杆桁架结构的有限元分析。
```A*/\/\/\*-------*BC```该桁架结构由四根杆件构成,材料为钢,杆件截面可视为圆形。
假设桁架结构的高度为H,宽度为W,杆件的直径为D,且杆件AB和BC的长度为L。
首先,我们需要将该桁架结构离散为有限元网格。
可以采用等距离离散方法,在杆件AB上取N个节点,在杆件BC上取M个节点。
每个节点的坐标可以通过计算得到。
接下来,我们需要确定边界条件。
假设桁架结构的支座在节点A和C 处。
我们可以将节点A和C固定,即其位移为零,这是考虑到节点A和C作为支座点不会产生水平和竖直的位移。
然后,我们需要为杆件的材料属性和截面属性建立数学模型。
假设桁架结构的钢材的弹性模量为E,泊松比为ν。
另外,我们需要确定杆件的截面半径r。
接下来,我们需要确定桁架结构的荷载。
假设在节点B作用一个竖直向下的荷载P。
这个荷载会使得杆件AB和杆件BC受到拉力。
然后,我们可以使用有限元软件进行计算。
在计算中,我们可以采用线性弹性模型进行计算,即假设所有杆件在加载之前是弹性的。
在计算中,我们可以使用有限元方法对每个单元进行力学性能和应力分布的分析。
可以使用线性弹性有限元方法,如直接刚度法或变分法等。
在计算得到每个单元的力学性能和应力分布后,我们可以进一步分析整个桁架结构的强度和刚度。
可以计算整个结构的位移、载荷和应力等。
最后,我们可以通过对结果进行后处理和分析,来评估桁架结构的性能和稳定性。
可以计算结构的应力、变形和应变等。
综上所述,2D四杆桁架结构的有限元分析可以通过离散桁架结构为有限元网格,确定边界条件、材料和截面属性,施加荷载,并使用有限元软件进行计算。
通过对每个单元的力学性能和应力分布进行分析,并综合整个结构的性能和稳定性,可以得到结构的位移、载荷和应力等信息。
有限元上机实验:ANSYS桁架分析
机电工程学院有限元法课程设计学号:专业:学生姓名:任课教师:2016年5月桁架有限元分析本问题研究针对机器人腿部机体的受力变形研究。
在机器人的所有结构中,该结构受力较复杂,强度要求较高,需要对其进行受力分析并进行结构优化。
一、研究对象由等直杆构成的平面桁架如图1所示,等直杆的截面积为30cm2,弹性模量为E=2.1e5 Mpa,泊松比为μ=0.3,密度为7800kg/m3,所受的集中力载荷为2.0N。
分析该桁架的强度是否符合要求,给出约束节点的支反力、杆件受力以及受力节点的位移。
载荷:1.0e8 N图1 超静定桁架二、分析过程1.打开软件,更改文件名称和存储位置:File>Change Jobname and Change Directory 。
图2 更改文件名图3 更改存储位置2.选取有限元单元:Preprocessor > Element Type > Add/Edit/Delete > Add > Link > 3D finit stn180 > OK > Close。
图4 选取有限元单元3.定义截面积:Preprocessor > Real Constants > Add/Edit/Delete > Add > 输入截面面积“0.03”> Ok > Close。
图5定义截面积4.输入材料弹性参数:Preprocessor > Material Props > Material Models > Structural > Linear >Elastic > Isotripic > 输入弹性模量> 输入泊松比>Ok > 关闭窗口> SA VE_DB 保存数据。
图6 输入材料弹性参数5.建立节点,坐标分别为(0,1) (1,0) (1,1) (2,1) :Preprocessor >Modeling>Create>Nodes>On working Plane>选取点。
桁架有限元程序流程(有限元课程设计)
有限单元法课程设计有限单元法是基于连续介质力学基础上发展起来的,目前使用最广泛的数值计算方法。
有限单元法解决问题的前提是各单元相邻边界的位移协调。
有限单元法解决问题的前提是各单元相邻边界的位移协调。
有限单元有限单元法将连续的求解域离散为一组有限个单元组成的组合体,由细分单元去逼近求解域,由于单元的不同连接方式和形式各异的单元形状由于单元的不同连接方式和形式各异的单元形状,,因此可以适应几何形状复杂的求解区域杂的求解区域;;第二第二,,利用每一个单元内的近似函数利用每一个单元内的近似函数((形函数形函数))来表示全求解域上待求的未知场函数待求的未知场函数,,把一个连续的无限自由度问题变成离散的有限自由度问题,只要求出单元结点的物理量只要求出单元结点的物理量,,就可以确定单元组合体上的其他未知场函数就可以确定单元组合体上的其他未知场函数,,如果选择合适的形函数选择合适的形函数,,随着网格密度的减小随着网格密度的减小,,近似解将逐步趋向精确解近似解将逐步趋向精确解;;第三第三,,有限单元法计算得到的总体刚度矩阵为稀疏带状矩阵,这样借助于电子计算机存储和计算的效率大大提高计算的效率大大提高,,便于处理大规模问题。
便于处理大规模问题。
从上述有限单元法的特性可知从上述有限单元法的特性可知,,其计算原理简单其计算原理简单,,但由于单元连接方式和单元形状的多元化元形状的多元化,,以及近似函数的选择合适与否以及近似函数的选择合适与否,,使得有限元法在针对具体问题求解时比较烦琐求解时比较烦琐,,正是基于这样的应用背景正是基于这样的应用背景,,本论文提出了一种更简单实用的单元模型—平面等效桁架单元模型。
最后最后,,编制有限元分析程序编制有限元分析程序,,将这种桁架单元模型运用于钢筋混凝土结构中型运用于钢筋混凝土结构中,,模型中混凝土采用等效桁架单元模型中混凝土采用等效桁架单元,,钢筋采用一维杆单元单元,,利用混凝土等效的应力应变关系对各种构件进行弹塑性分析,并试探性的提出了单元破坏准则。
有限单元法电子课件(桁架)-PPT精选文档
0 1 0 0 0 0 P 0 0 0 0 0
0 1 0 0 0 0
0 0 0 0 K 33 K 34 K 43 K 44 0 0 K 63 K 64
图3 单元形函数(线性)示意图
平面桁架(Trusses)有限元分析(2)
2、单元应变
u ( u u ) / l [] B {} d x i j e e, x
--- 几何矩阵 [] B [1 / l / l ] e 1 e
3、单元应力
EE [ B ] { d } [ C ] { d }其中E为弹性模量, [C]=E[B] --- 应力矩阵
单元的结点位移
x
i
j
ux ( ) [ N ] { d } e
图2 局部坐标系中的杆单元
N1 N2
u i [ N ] [ N , { d } i N j] e u j
x x N 1 , N i j le le
形函数 (shape function)
1 1
le
1 x 2
▲ 有限元法的要点
●
将连续体(结构)离散为若干子区域
子区域由结点连接为等效的组合体
●
杆系结构
每个单元内假设场变量为多项式(系数不同) 用分区域连续场函数近似全区域的连续场函数
无穷自由度问题转化为有限自由度问题
●
利用变分原理得到离散场变量的大代数方程组 将微分方程边值问题转化为代数方程来求解
连续体
绪 论
x x e e
4、单元刚度矩阵
le Fjle EAe Fl i e EAe
单元的结点力
{ F } [ k] { d } e
平面桁架有限元C#编程

1题目结构如图所示: 杆的弹性模量E 为200000Mpa ,横截面面积A 为3250mm 2。
图 1 桁架示意图2实验材料PC 机一台,Microsoft Visual Studio 软件,Ansys 软件。
3实验原理(1)桁架结构特点桁架结构中的桁架指的是桁架梁,是格一种梁式结构。
桁架结构常用于大跨度的厂房、展览馆、体育馆和桥梁等公共建筑中。
由于大多用于建筑的屋盖结构,桁架通常也被称作屋架。
结构上由光滑铰链连接,载荷只作用于节点处,只约束线位移,各杆只有轴向拉伸和压缩。
(2)平面桁架有限元分析1、单元分析局部坐标系中的干单元如图所示:图 2 局部坐标系中的杆单元以下公式描述了整体位移和局部位移之间的关系:U=Tu 其中U=[ U ix U iy U jx U jy ],T=[cos θ−sin θ00sin θcos θ0000cos θ−sin θ00sin θcos θ],u=[u ix u iy u jx u jy ]U 和u 分别代表整体坐标系和局部坐标系XY 系和局部坐标系xy 下节点i 和节点j 的位移。
T 是变形从局部坐标转换到整体坐标系下的变换阵,类似的局部力和整体力也有以下关系:F=Tf其中F=[ F ixF iy F jx F jy ] ,是整体坐标系下施加在节点i 和j 上的力的分量而且f=[ f ix f iy f jx f jy ],代表局部坐标系下施加在节点i和j上的分量。
在假设的二力杆条件下,杆只能沿着局部坐标系的x方向变形,内力也总是沿着局部坐标系x的方向,因此将y方向的位移设置为0,局部坐标系下内力和位移通过刚度矩阵有如下关系:[f ixf iyf jxf jy]=|k0−k00000−k0k00000|=[U ixU iyU jxU jy]这里k=k eq=AE/L,写成矩阵形式有:f=Ku将f和u替换成F和U有:T-1F=KT-1U将方程两边乘以T得到:F=TKT-1U其中T-1是变换矩阵T的逆矩阵,替换方程中的TKT-1和U矩阵的值,相乘后得到:[F ixF iy F jx F jy]= k[cos2θsinθcosθ−cos2θ−sinθcosθsinθcosθsin2θ−sinθcosθ−sin2θ−cos2θ−sinθcosθcos2θsinθcosθ−sinθcosθ−sin2θsinθcosθsin2θ][U ixU iyU jxU jy]上述方程代表了施加外力、单元刚度矩阵和任意单元节点的整体位移之间的关系。
2015-平面桁架有限元程序设计_任务书
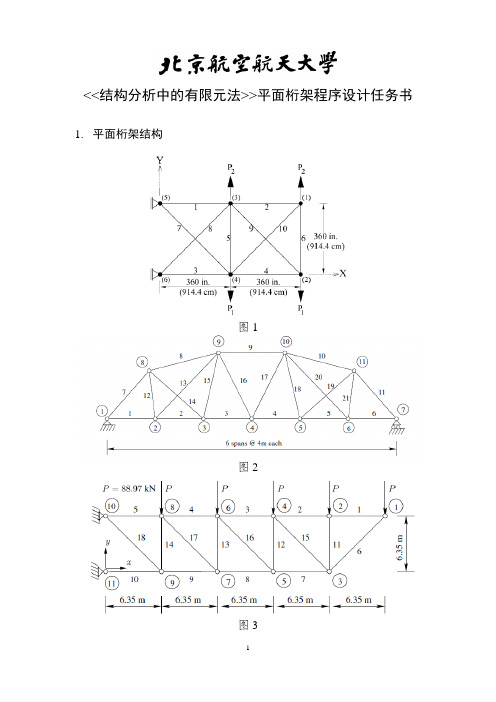
<<结构分析中的有限元法>>平面桁架程序设计任务书1.平面桁架结构
图1
图2
图3
基于平面桁架静力有限元分析理论自行编写平面桁架有限元分析程序,并利用自编程序对图1、图2和图3所示三个平面桁架结构形式进行变形和应力分析,其中结构材料、结构尺寸和外载荷可自行设定。
2.程序编写和报告撰写要求
(1)编制的程序要求具有一定的“通用性”,通过“输入文件”形式读
入具体分析结构的结点个数、结点坐标、单元个数、单元结点信息、单元材料信息、单元刚度和结点外载荷信息等,从而实现程序的通用性;
(2)提交形式:程序和计算分析报告电子版发至邮箱:
xjwang@),程序和计算分析报告打印版一份;
(3)提交时间:2015年5月28日前。
有限元原理 结构矩阵分析(平面桁架 平面应力) 变分

设平面桁架单元在总体坐标系中刚度矩阵的一般形式为
由(2-1-8),当单元结点位移为{1 0 0 0 }T时,在单元各结点上施加的力刚好为单元刚度矩阵中的第一列:{k11k21k31k41}T。对[k]的其他各列也可做出类似的解释。即单元刚度矩阵的每一列相当于一组特定位移下的结点力,如表2-1所示。由图2-4可以获得更为直观的理解。
它们将作为程序的输入数据(几何参数)。
每个结点有两个自由度,对结点1、2、3分别为
若暂时不考虑支承约束条件,整个结构的结点自由度为
3、单元分析(建立结点力与结点位移之间的关系)
取一个一般性的单元,设它的两个结点在结构中的编号为i, j(单元内部的结点序号)。由材料力学可知,杆的轴向刚度为EA/L。其中L为杆的长度:
单元结点自由度{u}={uiviujvj}T
结点给单元的力{r}={piqipjqj}T
在图2-3中,x’轴与x轴的夹角为α
结点的位移分量的坐标变换为
单元的位移分量的坐标变换为
或缩写为
类似,{r’}与{r}之间的转换关系为
由于
是正交矩阵,因此
也是正交矩阵。所以有
将(2-1-4)、(2-1-5)代入(2-1-2)有
为了描述结构的平衡需要建立一个坐标系,称为总体坐标系,以区别于以后出现的“局部坐标系”。总体坐标系的选择原则上不受限制,但希望使用方便。本节所选的总体坐标系示于图2-2,坐标原点与结点1重合。以u, v分别表示沿x, y方向的位移分量,p, q分别表示力沿x, y轴的力分量(投影)。
在总体坐标系中各结点的坐标为:
对结点1:
对结点2:
对结点3;
可以合并成
式(2-1-14)的右边为外载荷和支反力。左边则为单元给结点的力,它们是未知的,但可以借助单元刚度矩阵以结点位移来表示。
平面桁架元有限元计算
2
2m
2m
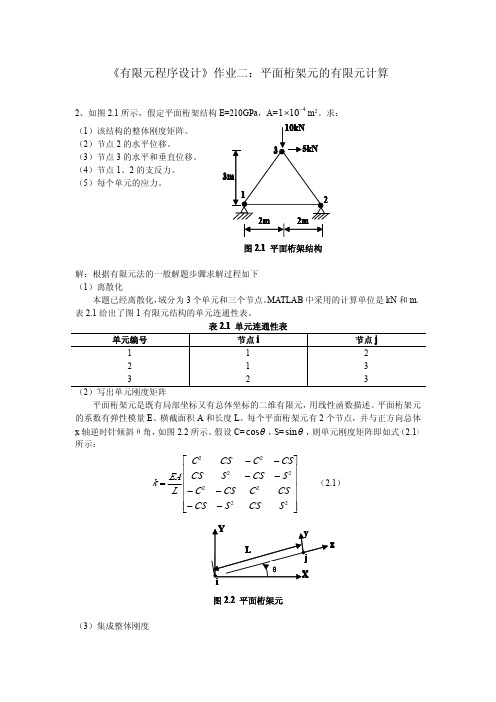
图 2.1 平面桁架结构
解:根据有限元法的一般解题步骤求解过程如下
(1)离散化 本题已经离散化,域分为 3 个单元和三个节点。MATLAB 中采用的计算单位是 kN 和 m。
表 2.1 给出了图 1 有限元结构的单元连通性表。 表 2.1 单元连通性表
单元编号
节点 i
节点 j
1
1
2
《有限元程序设计》作业二:平面桁架元的有限元计算
2、如图 2.1 所示,假定平面桁架结构 E=210GPa,A=1×10−4 m2。求:
(1)该结构的整体刚度矩阵。 (2)节点 2 的水平位移。 (3)节点 3 的水平和垂直位移。 (4)节点 1、2 的支反力。 (5)每个单元的应力。
3m 1
10kN
对一个有 n 个节点的平面结构元而言,其整体刚度矩阵 K 应该是 2n × 2n 矩阵。调用
MATLAB 的 PlaneTrussAssemble 函数可以得到刚度矩阵 K。 (4)引入边界条件
用上一步得到的整体刚度矩阵,就可以列出下列方程组:
[K ]{U}= {F} (2.2)
式中,U 是结构节点的位移矢量,F 是结构节点载荷矢量。其中,边界条件被赋值给矢 量 U 和 F: (5)解方程
K:
[K ]new = [T ][K ]old [T ]T (2.4)
[ ] 式中, T 是 2n × 2n 的变换矩阵,该矩阵通过调用 MATLAB 的 PlaneStrussInclinedSupport
函数得到。假定在节点 i 的支座的倾斜角为α,如图 2.3 所示。
α x
图 2.3 平面桁架的倾斜支座
2
1
3
平面桁架静力分析有限元程序

有限单元法平面桁架静力分析有限元程序#define NODE_NUM 300#define ELE_NUM 200#include<stdlib.h>#include<stdio.h>#include<math.h>int nj,ne,nm,nz,npj,jm[ELE_NUM][3],nzc[60],nj2,bw;float xy[NODE_NUM][4],EA[5],p[NODE_NUM],pj,F[ELE_NUM]; float ek[5][5];double **K,*f;int BAND2(int n,int m,double **K,double *f);double **TwoArrayAlloc(int,int);void TwoArrayFree(double**);FILE *outfile;/*-----------------------------*/double **TwoArrayAlloc(int r,int c){double *x,**y;int n;x=(double*)calloc(r*c,sizeof(double));y=(double**)calloc(r,sizeof(double*));for(n=0;n<=r-1;++n)y[n]=&x[c*n];return(y);}/*--------------------------------*/void TwoArrayFree(double **x){free(x[0]);free(x);}/*--------------------------------*/int BAND2(int n,int m,double **K,double *f) /*解方程函数*/ {int i,j,t,ij,ji,it,jt,tm,m1;double s,w;m1=m+1;for(i=1;i<=n;i++){if(K[i-1][m1-1]<=0) return(0);w=0.0;if(i>m1) tm=i-m;else tm=1;for(j=tm;j<=i;j++){s=0.0;ij=j-i+m1;for(t=tm;t<=j-1;t++){it=t-i+m1;jt=t-j+m1;s=s+K[i-1][it-1]*K[j-1][jt-1]/K[t-1][m1-1];}K[i-1][ij-1]=K[i-1][ij-1]-s;if(j==i)f[i-1]=f[i-1]-w;elsew=w+K[i-1][ij-1]*f[j-1]/K[j-1][m1-1];}}for(i=n;i>=1;i--){s=0.0;if(i>n-m1) tm=n; else tm=i+m;for(j=i+1;j<=tm;j++){ji=i-j+m1;s=s+K[j-1][ji-1]*f[j-1];}f[i-1]=(f[i-1]-s)/K[i-1][m1-1];}return 1;}/*--------------------------------------------*/void input()/*输入函数*/{int jj,j,i,nh,nl;float dx,dy;FILE *infile;infile=fopen("dat.txt","r");outfile=fopen("out.txt","w");fscanf(infile,"%d%d%d%d%d",&nj,&ne,&nm,&nz,&npj); /*读入控制数据*/fprintf(outfile,"The Num. Of Nodes: %3d\n",nj);/*输出节点数*/fprintf(outfile,"The Num. Of Mem.: %3d\n",ne);/*输出单元数*/fprintf(outfile,"The Num. Of Type Of Section Characteristic: %3d\n",nm);/*输出材料类型数*/fprintf(outfile,"The Num. Of Restriction: %3d\n",nz);/*输出荷载数*/ fprintf(outfile,"The Num. Of Nodal Loads: %3d\n",npj);/*输出荷载数*/for(i=1;i<=nj;i++){for(j=1;j<3;j++)fscanf(infile,"%f",&xy[i][j]);/*读入节点坐标*/}fprintf(outfile,"Coordinates x and y Of Nodes:\n");fprintf(outfile," Node x y\n");for(i=1;i<=nj;i++){fprintf(outfile,"%10d%10.2f%10.2f\n",i,xy[i][1],xy[i][2]);/*输出节点坐标*/}for(i=1;i<=ne;i++){for(j=0;j<3;j++)fscanf(infile,"%d",&jm[i][j]);/*读入单元信息(材料类型、单元左右节点码)*/}fprintf(outfile,"The Nodes Num. Of Mem.:\n");fprintf(outfile," Mem. Type Left Right\n");for(i=1;i<=ne;i++){fprintf(outfile,"%10d%10d%10d%10d\n",i,jm[i][0],jm[i][1],jm[i][2]);/*输出单元信息*/}for(i=1;i<=nm;i++) fscanf(infile,"%f",&EA[i]);/*读入材料刚度*/for(i=1;i<=nm;i++){fprintf(outfile,"nm=%d EA=%f\n",i,EA[i]);/*输出材料刚度*/ }for(i=1;i<=nz;i++) fscanf(infile,"%d",&nzc[i]);/*读入约束位置*/ fprintf(outfile,"The Position Of Restriction: ");for(i=1;i<=nz;i++){fprintf(outfile,"%d ",nzc[i]);/*输出约束位置*/}fprintf(outfile,"\n");nj2=nj*2;/*形成荷载*/for(i=0;i<nj2;i++) p[i]=0.0;for(i=0;i<npj;i++){fscanf(infile,"%d%f",&jj,&pj);/*读入荷载位置、荷载大小*/ p[jj]=pj;}fclose(infile);}/*-------------------------------------------------------------------------*/int bwidth()/*求半带宽函数*/{int ie,i,j,min,max,jj,ib,lk,m,nn[8];ib=0;for(ie=1;ie<=ne;ie++){m=abs(jm[ie][1]-jm[ie][2]);if(m>ib) ib=m;/*找出单元左右节点码之差的最大值*/ }return 2*ib+2;/*返回半带宽*/}/*-------------------------------------------------------------------------------*/ void stiff(int ie) /*形成单刚函数*/{int i,j,k,m,n;float dx,dy,dz,l,cx,cy,cz,ea;i=jm[ie][1];/*单元左节点号*/j=jm[ie][2];/*单元右节点号*/m=jm[ie][0];/*单元材料类型号*/dx=xy[j][1]-xy[i][1];/*单元左右节点横坐标之差*/dy=xy[j][2]-xy[i][2];/*单元左右节点纵坐标之差*/l=sqrt(dx*dx+dy*dy);/*单元长度*/cx=dx/l;/*求余弦*/cy=dy/l;/*求正弦*/ea=EA[m]/l;/*fprintf(outfile,"%d%10.2f\n",ie,l);*/ek[1][1]=ek[3][3]=cx*cx*ea;/*求单刚*/ek[2][2]=ek[4][4]=cy*cy*ea;ek[2][1]=ek[1][2]=ek[3][4]=ek[4][3]=cx*cy*ea;ek[4][1]=ek[1][4]=ek[3][2]=ek[2][3]=-cx*cy*ea;ek[1][3]=ek[3][1]=-cx*cx*ea;ek[2][4]=ek[4][2]=-cy*cy*ea;}/*-----------------------------------------------------------------------------*/ int ekzk(int ie)/*集成总刚度*/{int i1,j1,i,j,i2,j2,ii,jj,ji;for(i1=1;i1<=2;i1++){for(i2=1;i2<=2;i2++){i=2*(i1-1)+i2;ii=2*(jm[ie][i1]-1)+i2;for(j1=1;j1<=2;j1++){for(j2=1;j2<=2;j2++){j=2*(j1-1)+j2;jj=2*(jm[ie][j1]-1)+j2;ji=bw+jj-ii;if(ji<=bw) K[ii-1][ji-1]=K[ii-1][ji-1]+ek[i][j];}}}}}/*---------------------------------------------------------------------------*/ void force()/*求单元轴力函数*/{int i,j,ie,m;float dx,dy,dz,l,cx,cy,cz,ea,w[7];fprintf(outfile,"============dyzl==================\n");for(ie=1;ie<=ne;ie++){i=jm[ie][1];j=jm[ie][2];m=jm[ie][0];w[1]=f[2*i-2];w[2]=f[2*i-1];w[3]=f[2*j-2];w[4]=f[2*j-1];dx=xy[j][1]-xy[i][1];dy=xy[j][2]-xy[i][2];l=sqrt(dx*dx+dy*dy);cx=dx/l;cy=dy/l;ea=EA[m]/l;dx=w[3]-w[1];/*左右节点水平位移之差*/dy=w[4]-w[2];/*左右节点竖直位移之差*/l=ea*(cx*dx+cy*dy);/*求单元轴力*/F[ie]=1;fprintf(outfile," %d %10.4f\n",ie,l);/*输出单元号、单元轴力*/ }}/*--------------------------------------------------------------------------------------*/ void main(){int ie,i,j,ii,jj,i1,j1;float p1,p2,p3;input();bw=bwidth();K=TwoArrayAlloc(nj2,bw);f=(double*)calloc(nj2,sizeof(double));if(f==NULL) exit(1);for(i=0;i<nj2;i++) f[i]=p[i+1];for(ie=1;ie<=ne;ie++){stiff(ie);ekzk(ie);}for(i=1;i<=nz;i++)/*约束处理(后处理的0、1置换法)*/{j=nzc[i]-1;for(i1=0;i1<bw-1;i1++){K[j][i1]=00.00;/*将有约束处的行置0*/ii=j+i1+1;if(ii<nj2) K[ii][bw-i1-2]=00.00;/*将有约束处的列置0*/ }K[j][bw-1]=1.00;/*将对角线元素置1*/f[j]=0;}/*fprintf(outfile,"========================zk======================\n");for(i=0;i<nj2;i++){for(j=0;j<bw;j++){fprintf(outfile,"%6.2f",K[i][j]);}fprintf(outfile,"\n");}*/fprintf(outfile,"============jdhz=================\n");for(i=0;i<nj2;i++){fprintf(outfile,"%d %6.2f\n",i+1,f[i]);/*输出节点力*/}if(!BAND2(nj2,bw-1,K,f)){printf("Failed!\n"); exit(0);}fprintf(outfile,"=========jdwy==========\n");fprintf(outfile," x y\n");for(ii=0;ii<nj;ii++){p1=f[2*ii];p2=f[2*ii+1];fprintf(outfile,"%2d %14.5f %14.5f\n",ii+1,p1,p2);/*输出节点位移*/ }force();fclose(outfile);}。
计算力学平面桁架程序说明
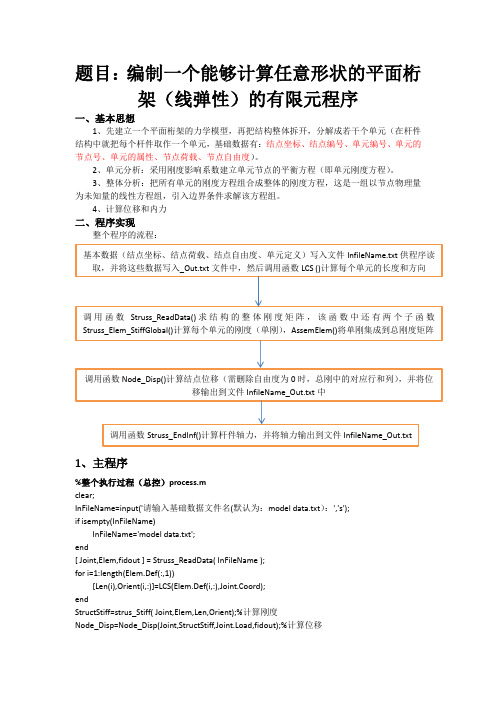
题目:编制一个能够计算任意形状的平面桁架(线弹性)的有限元程序一、基本思想1、先建立一个平面桁架的力学模型,再把结构整体拆开,分解成若干个单元(在杆件结构中就把每个杆件取作一个单元,基础数据有:结点坐标、结点编号、单元编号、单元的节点号、单元的属性、节点荷载、节点自由度)。
2、单元分析:采用刚度影响系数建立单元节点的平衡方程(即单元刚度方程)。
3、整体分析:把所有单元的刚度方程组合成整体的刚度方程,这是一组以节点物理量为未知量的线性方程组,引入边界条件求解该方程组。
4、计算位移和内力二、程序实现整个程序的流程:1、主程序%整个执行过程(总控)process.mclear;InFileName=input('请输入基础数据文件名(默认为:model data.txt):','s');ifisempty(InFileName)InFileName='model data.txt';end[ Joint,Elem,fidout ] = Struss_ReadData(InFileName );fori=1:length(Elem.Def(:,1))[Len(i),Orient(i,:)]=LCS(Elem.Def(i,:),Joint.Coord);endStructStiff=strus_Stiff( Joint,Elem,Len,Orient);%计算刚度Node_Disp=Node_Disp(Joint,StructStiff,Joint.Load,fidout);%计算位移[InFL,F]=Struss_EndInf(Elem,Len,Orient,Node_Disp,fidout);%计算内力****************************************************************************** function [ varargout ] = LCS( iDef,Coord,varargin )%该LCS函数计算单元的长度和位向(方向)%输入:iDef=单元杆端结点号% Coord=结点坐标x,y% TypeNo=varargin{1}表示输出类型的编号:输出单元长度1、输出单元位向2、输出单元长度及位向3%输出:Len{1}=单元长度% Orient{2}=单元位向%输入参数处理if length(varargin)==0TypeNo=3;elseif length(varargin)==1TypeNo=varargin{1};elseerror('调用函数LCS时,输入参数数目有误!')end%单元长度和位向计算xy1=Coord(iDef(2),:);xy2=Coord(iDef(3),:);dxy=xy2-xy1;Len=sqrt(sum(dxy.*dxy));ifTypeNo==1varargout{1}=Len;elseifTypeNo==2varargout{1}=[dxy(1)/Len,dxy(2)/Len];elseifTypeNo==3varargout{1}=Len;varargout{2}=[dxy(1)/Len,dxy(2)/Len];end2、从基础数据文件读取数据赋值给数组function [ Joint,Elem,fidout ] = Struss_ReadData( InfileName )%从基础数据文件读取数据赋值给数组%Joint=struct('NJoint',[],'NDOF',[],'Coord',[],'DOF',[],'Load',[]);Elem=struct('NElem',[],'Def',[]);fidout=0;%从基础数据文件读取数据[Joint,Elem,JointDef]=ReadData(Joint,Elem,InfileName);%整理输入数据[Joint,Elem,JointDef]=PackData(Joint,Elem,JointDef);%把基础数据写入输出文件[OutFileName,fidout]=WriteData(Joint,Elem,InfileName);end****************************************************************************** function [ Joint,Elem,JointDef ] = ReadData( Joint,Elem,InFileName )%从基础数据文件读取数据fidin=fopen(InFileName,'r');%以只读方式打开格式文件JointDef=[];%设置初值iffidin==-1error('没有这个基础数据文件');endwhile ~feof(fidin); %测试文件的结尾line=fgetl(fidin);%按行读取字符串line=deblank(line(end:-1:1));line(end:-1:1)=line;%去掉每行字符前的空格if~isempty(line)&~strncmp(line,'%',1)%排除空行和注释行%-----读取结点和单元数据KeyWord=strtok(line,',');%取第一个逗号“,”前的子串,即关键字dotsuffix=find(line==',');%提取逗号在字符串中的下标NumVec=str2num(line(dotsuffix(1)+1:end));%提取第一个逗号后的子串并数值化switchKeyWordcase 'Contl'Joint.NJoint=NumVec(1);Joint.NDOF=NumVec(2);Elem.NElem=NumVec(3); case 'Joint'JointDef=[JointDef;NumVec];case 'Elem'Elem.Def=[Elem.Def;NumVec];case'JointLoad'Joint.Load=[Joint.Load;NumVec];otherwiseerror('没有这种数据类型标识!')endendendfclose(fidin);%关闭文件****************************************************************************** function [ Joint,Elem,JointDef ] = PackData( Joint,Elem,JointDef )%整理输入数据% 整理结点坐标数据Joint.Coord=JointDef(:,2:3);%结点坐标Joint.DOF=JointDef(:,4:5);%结点自由度%整理单元数据if length(Elem.Def(1,:))==4Elem.Def(:,5)=1e-5;%设置线膨胀系数默认值end****************************************************************************** function [ OutFileName,fidout ] = WriteData( Joint,Elem,InfileName )%WriteData把基础数据写入输出文件%设置输出文件名,把‘.m'替换为’_Out.txt'OutFileName=strrep(InfileName,'.txt','_Out.txt');fidout=fopen(OutFileName,'wt');%以只写方式打开格式文件%基础数据输出到文件fprintf(fidout,'%s\n','%平面桁架静力分析数据');fprintf(fidout,'%s\n',['%输入数据文件:',InfileName]);fprintf(fidout,'\n');fprintf(fidout,'%s\n','%-----输入数据---------');fprintf(fidout,'%s\n','%控制数据');fprintf(fidout,'%s\n','%单元数结点数自由度数');fprintf(fidout,'%5d%10d%10d\n',Elem.NElem,Joint.NJoint,length(find(Joint.DOF)));fprintf(fidout,'\n');fprintf(fidout,'%s\n','%基础数据');fprintf(fidout,'%s\n','%结点坐标及自由度');fprintf(fidout,'%s\n','%结点号X Y DOF1 DOF2 ');fori=1:Joint.NJointfprintf(fidout,'%5d%9g%9g%9d%9d\n',i,Joint.Coord(i,:),Joint.DOF(i,:));endfprintf(fidout,'\n');fprintf(fidout,'%s\n','%单元编号、截面几何和材料常数');fprintf(fidout,'%s\n','%单元号始端号末端号轴向刚度线膨胀系数');fori=1:Elem.NElemfprintf(fidout,'%5d%10d%12g%15g%15g\n',Elem.Def(i,:));end%输出结点荷载fprintf(fidout,'\n');fprintf(fidout,'%s\n','%结点荷载');if ~isempty(Joint.Load)fprintf(fidout,'%s\n','%结点号方向荷载值');[r,v]=size(Joint.Load);fori=1:rfor j=1:vfprintf(fidout,'%d\t',Joint.Load(i,j));endfprintf(fidout,'\n ');endelsefprintf(fidout,'%s\n','%--------无结点荷载');end end3、单元分析求出单元在整体坐标系中的刚度矩阵(这里直接求整体坐标下的刚度矩阵还是比较方便的,不需要先求单元坐标下的矩阵,再转换成整体坐标下的)。
平面桁架ANSYS有限元法分析实例
2. 前处理 (1)定义单位
从第二章可知,ANSYS中单位可以不定义,但建模时一定要 保证单位的一致。
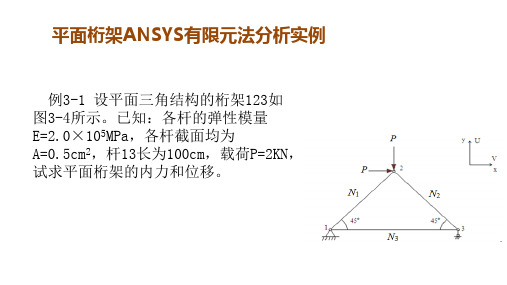
已知:各杆的弹性模量E=2.0×105MPa,各杆截面均为A=0.5cm2,杆13长 为100cm,载荷P=2KN,试求平面桁架的内力和位移。
本题采用单位m-kg-s-N较简便,建模过程中 的所有参数都选用m-kg-s-N,相应计算结果 应力为Pa。
改为国际单位制:各杆的弹性模量E=2.0×1011Pa, 各杆截面均为A=0.5e-4m2,杆13长为1m,载荷 P=2000N。
(2)定义单元类型
单元类型
特点
结点数 结点自由度
适用
LINK1 LINK8 LINK10
二维杆单元,只承受 轴向的拉压力,不考 虑弯矩
三维杆单元,具有塑 性、蠕变、膨胀、应 力刚化、大变形、大 应变等功能。
平面桁架ANSYS有限元法分析实例
例3-1 设平面三角结构的桁架123如 图3-4所示。已知:各杆的弹性模量 E=2.0×105MPa,各杆截面均为 A=0.5cm2,杆13长为100cm,载荷P=2KN, 试求平面桁架的内力和位移。
解:传统分析方法
设杆12、杆23和杆13的内力分别为N1、N2和N3。在总体坐标系 x-y(或U-V)中,由力的平衡方程可以得到结点的内力值。
3.求解 (1)施加约束
• 本例中,点1为固定支座,点3为活动支座。 • 在节点1上,约束UX、UY; • 在节点3上,约束UY。
• 在节点1上,约束UX、UY,如图; • 在节点3上,约束UY。
(2)施加载荷
选节点2,按图示完成;
•apply-,选FY,输入-2000,OK。 施加载荷后,结果如图
仅受拉或受压的三维 杆单元,具有应力刚 化和大变形功能。
结构力学5平面桁架讲解课件

基于有限元的数值模拟方法
有限元法基本原理 线性弹性有限元法 非线性有限元法
桁架模型的建立与求解
桁架模型的离散化
单元刚度矩阵的推导
整体刚度矩阵的组装
实验设计与结果对比
01
实验设计
实验设备
02
03
实验结果与数值模拟对比
案例一:某大型桥梁的平面桁架设计
设计背景
桁架选型
结构分析
优化措施
案例二:高层建筑中的平面桁架支撑结构
刚度原则 经济性原则
桁架的形状与尺寸优化
形状优化
通过改变桁架的形状,如采用抛 物线型、悬链线型等,以降低杆 件内力峰值,提高结构受力性能。
尺寸优化
在给定桁架形状和拓扑关系的情 况下,调整杆件的截面尺寸,使 桁架在满足约束条件下重量最轻
或成本最低。
等强度设计
通过调整杆件截面尺寸,使各杆 件在相同荷载作用下达到相近的 内力水平,实现材料的高效利用。
约束振动
当桁架与外部约束(如支撑或其他结构)相互作用时发生的振动。这种振动受到 外部约束的影响,其频率和模态与自由振动有所不同。
桁架的自振频率与模态分析
自振频率 模态分析
桁架在动力荷载作用下的响应
瞬态响应
频域响应
阻尼效应
请注意,以上内容是对“ 结构力学5
桁架设计的基本原则
稳定性原则
。
强度原则
02
几何构造简单
受力性能明确
03 高效的经济性
平面桁架的应用场景
桥梁工程
建筑工程 机械工程
节点法与截面法
节点法 截面法
零杆的判断与去除
零杆判断
零杆去除
桁架内力计算:轴力、剪力与弯矩ຫໍສະໝຸດ 轴力计算 剪力计算 弯矩计算
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§1.1 有限单元法的概念
基本思路:借助数学和力学知识,利用计算机技术解决工 程技术问题 有限元分析是利用数学近似分析方法对真实物理系统 (几何、载荷工况)进行模拟,利用简单而又相互作用的 元素,即单元,用有限数量的未知量去逼近无限未知量的 真实系统。
有限单元法(FEM) 是20世纪50年代以来随着计算机的广 泛应用而发展起来的一种现代数值解法。该方法首先应用 在连续力学领域 —— 飞机结构静、动态特性分析中。随后 很快就广泛应用于求解传导、电磁场、流体力学等连续性 问题。
引入边界条件,求解结点上的未知场变量;
六、其他参数的计算
利用已经求解的场变量,计算其他场变量;
§1.3 常用的有限元分析软件
(1) ANSYS
是商业化比较早的一个软件(收购了一些其他软件 公司)
功能强大、模块多、比较通用; 土木工程:CivilFEM
(2) MSC
产品系列多、通用软件、二次开发功能强; 土木工程:MSC.MARC系列,Patran, MSC Nastran 及Adams
500
600
3.141518269
3.141536068
7
8 9 10
3.096194954
3.104496068 3.110541737 3.115105951
700
800 900 1000
3.14154775
3.141555901 3.141561854 3.141566356
100000
3.14159262729364
在建的大连国际贸易中心大厦 (78层,342米)
63863个梁柱单元;
34180个结点;
§1.1 有限单元法的概念
在建的大连市体育中心
§1.1 有限单元法的概念
§1.1 有限单元法的概念
456 个坝体单元,1040个 地基单元,2163 个结点;
溪洛渡拱坝 (高297米)
§1.1 有限单元法的概念
§1.1 有限单元法的概念
数学:离散化的手段,将偏微分方程、变分方程变成代 数方程; 计算曲线长度:将曲线离散成N段,每段用直线长度代替 曲线长度,直线长度总和即可曲线长度,当N为无穷大时, 即为精确解。
y
真实半圆周长:
L R
R
o x 近似半圆周长:
元法的概念
有限单元法及程序设计
有限单元法及程序设计
第一章 绪论
第二章 平面桁架有限元分析
第三章 平面刚架有限元分析
第四章 平面问题有限元分析
第一章 绪论
第一章 绪论
§1.1 有限单元法的概念
§1.2 有限单元法的基本步骤
§1.3 常用有限单元分析软件
数值方法(模拟)
有限元方法 边界元方法 有限差分方法 有限体积法 无网格方法
§1.1 有限单元法的概念
力学:离散化的手段,利用单元力学特性,将连续体离 散成有限个单元的组合结构;
齿轮的应力分布:将齿轮分割成很多单元,由结点相连 并传递求解信息,用有限个连续体的组合代替原来的齿 轮结构。
§1.1 有限单元法的概念
电动铲运机
§1.1 有限单元法的概念
液压挖掘机动臂
§1.1 有限单元法的概念
0 0 1 2 3 4 5 6 7 8 9 10
200 300
Number
§1.1 有限单元法的概念 圆周率的计算方法:
L R li R
N
计算值 单元数 10000 20000 30000 40000 50000 60000 70000 80000 90000 计算值 3.14159182203980 3.14159235959336 3.14159249355859 3.14159254964652 3.14159257921409 3.14159259701029 3.14159260869055 3.14159261684035 3.14159262279185
单元
– 网格划分中每一个小的块 体
单元 单元
结点
– 确定单元形状、单元之间 相互联结的点
结 点
结点力
结点力
– 单元上结点处的结构内力
载荷
载荷
– 作用在单元结点上的外力 (集中力、分布力)
约束
– 限制某些结点的某些自由 度
约束
§1.2 有限单元法的基本步骤
一、结构离散化
将求解域离散成单元表示的组合体,单元以结点相连;
二、选择插值函数(位移模式)
选择插值函数来表达单元内场变量的变化规律 场变量:标量 向量 张量 力、位移 应力、应变
三、形成单元性质的矩阵方程
单元刚度方程:单元结点力与单元结点位移之间的关系;
§1.2 有限单元法的基本步骤
四、形成整体系统的矩阵方程
综合所有单元性质的矩阵,形成整体系统的矩阵方程;
五、约束处理,求解系统方程
4
单元数 1 2
计算值 2 2.82843
理论值 3.14159 3.14159
误差(%) 36.34 9.97
3
3 4
2.97607 3.03528
3.06596 3.08425 3.09619 3.1045 3.11054 3.11511 3.14076 3.1413 3.14143
3.14159 3.14159
Adams ------多体动力学;Actran------声学仿真;Easy5-----控制仿真工具; Marc------非线性;SimXpert------多学科仿真;MSC Nastran------结构化 与多学科FEA; Dytran------显式动力学与流固耦合;MSC Fatigue------基于FE的耐久性 仿真工具;Sinda------高级热分析解决方案;Digimat------非线性,多尺 度的材料与结构建模平台;SimDesigner------CAD嵌入式多学科仿真; Patran------有限元分析解决方案;SimManager------仿真数据和流程管理
小数点后面20位:3.14159265358979323846
单元数 计算值 单元数
1
2
2
2.828427125
100
200
3.14076059
3.141298567
3
4
2.976067743
3.03527618
300
400
3.14143259
3.141488694
5
6
3.065955436
3.08425285
3.14159 3.14159 3.14159 3.14159 3.14159 3.14159 3.14159 3.14159 3.14159
5.27 3.38
2.41 1.83 1.45 1.18 0.99 0.84 0.03 0.01 0.01
Arc Length
5
2
6 7 8
1
9 10 100
导管架码头结构
§1.1 有限单元法的概念
高桩码头
高桩码头下部结构
高桩码头上部结构
§1.1 有限单元法的概念
游艇码头结构
§1.1 有限单元法的概念
重力式码头结构
§1.1 有限单元法的概念
有限元模型
有限元模型 是真实系统理想化的数学抽象。
真实系统
有限元模型
§1.1 有限单元法的概念
有限元单元模型中几个重要概念