第 3 章 力学平衡问题
第3章 静力学平衡问题 (2)
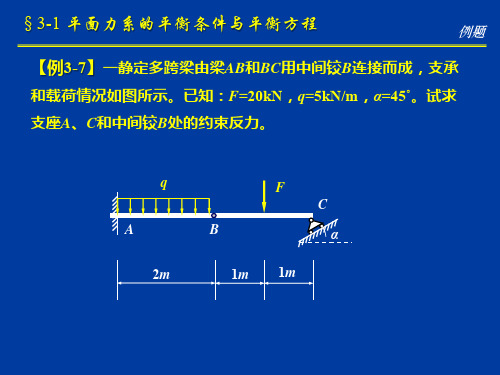
例题
(2)再研究轮
FOx FOy FʹB
M
O
(F ) 0
FB cos R M 0
F
F
解得:
x
0
0
FOx FB sin 0
FB cos FOy 0
y
M FP R
FOx FP tg
FOy FP
【负号表示力的方向与图中所设方向相反】
由图示几何关系,在Rt△BFE和 Rt△EDA中
BD=BE+DE=1.2 2+
1.8 2
≈2.97(m)
∑ MA(F) =0 M-FA×BD=0
解得 FA=M/BD=269.36(N) FC=FA=269.36N
B
解法二:以整体作为研究对象, 画出受力图。
C
M FCy
FAx
FCx
列平衡方程
∑ Fx=0 ∑ Fy=0
§3-1 平面力系的平衡条件与平衡方程
例题
M A (F ) 0 : MB (F ) 0 MC (F ) 0
解得:
2 3M FA 3a 3P 3
FC
3 aM 0 2
3 a FA aP M 0 2 2 3 a FB a P M 0 2 2
FAx=FCx=190.48kN
【3-5】为了测定飞机螺旋桨所受的空气阻力偶,可将飞机水平放
置,其一轮搁置在地秤上。当螺旋桨未转动时,测得地秤所受的压
力为4.6 kN;当螺旋桨转动时,测得地秤所受的压力为6.4 kN。已 知两轮间的距离l=2.5 m。试求螺旋桨所受的空气阻力偶的力偶矩 M 的数值。
B
α
FNC
∑ MB(F) =0
第3章静力学平衡问题习题解

解:以A为研究对象,受力如图(a)ห้องสมุดไป่ตู้
所示 ,其中:FT=G。
,
,
3–6图示液压夹紧机构中,D为固定铰链,B、C、E为铰链。已知力F,机构平衡时角度如图所示,求此时工件H所受的压紧力。
解:图(a):ΣMz= 0, ,F=70.95 N
ΣMy= 0, ,FBx=-207N(↓)
ΣFx= 0, ,FAx=-68.4N(↓)
ΣMx= 0, ,FBy=-19.04N
ΣFy= 0, ,FAy=-47.6N
F= 70.95N; N; N
3-25水平轴上装有两个凸轮,凸轮上分别作用已知力F1(大小为800N)和未知力F。如轴平衡,求力F的大小和轴承A、B的约束力。
解:图(a)中,
kN/m
F= 40kN(后轮负重)
ΣMD= 0
l= 1m
即lmax= 1m
3-15图示构架由杆AB、CD、EF和滑轮、绳索等组成,H,G,E处为铰链连接,固连在杆EF上的销钉K放在杆CD的光滑直槽上。已知物块M重力P和水平力Q,尺寸如图所示,若不计其余构件的自重和摩擦,试求固定铰支座A和C的反力以及杆E F上销钉K的约束力。
取节点A为研究对象,受力如图(d)所示。
, ;
, ;
取节点B为研究对象,受力如图(e)所示。
, ;
, ;
取节点C为研究对象,受力如图(f)所示。
, ;
, ;
取节点E为研究对象,受力如图(g)所示。
, ;
(2)取图(b)中桁架为研究对象,求
第三章力系的平衡介绍

工 程 力 学
§3-2
平面力系的平衡条件
F1 Fn F3
1、平面任意力系的平衡方程 F2 平面任意力系平衡的充要条件是: 力系的主矢和对任意点的主矩都等于零。
0 FR
第 三 章 力 系 的 平 衡
Mo 0
平面任意力系
FR ( Fx ) 2 ( Fy ) 2
M O M O (F )
2
0
F
x
0,
F
y
0,
F
z
0
即:汇交力系的平衡条件是力系中所有各力在各个坐
标轴中每一轴上的投影的代数和分别等于零。
工 程 力 学
三、空间平行力系的平衡方程
第 三 章 力 系 的 平 衡
F
z
0,
M (F ) 0, M (F ) 0
x
y
工 程 力 学
四、空间力偶系的平衡方程
第 三 章 力 系 的 平 衡
工 程 力 学
例:如图所示为一种起吊装置的结构简图。图中尺寸d , 载荷F, <FAD =60均为已知。若不计各杆自重,试求杆AF与杆AD在各 自的约束处所受的约束力。
第 三 章 力 系 的 平 衡
工 程 力 学
第 三 章 力 系 的 平 衡
工 程 力 学
例:滑轮支架系统如图所示。已知G,a,r,θ ,其余物体重 量不计,试求A和B的约束力。
工 程 力 学
3、平面汇交力系的平衡方程
F
x
0,
F
y
0
4、平面力偶系的平衡条件
第 三 章 力 系 的 平 衡
M 0
即:力偶系各力偶力偶矩的代数和等于零。
工 程 力 学
理论力学-3-力系的平衡

z
F2
O
F1
F
z
0
M F 0 M F 0
x y
自然满足,且
M F 0
z
M F 0
O
平面力系平衡方程的一般形式
于是,平面力系平衡 方程的一般形式为: z O y
Fx 0 Fy 0 M F 0 o
其中矩心 O 为力系作用面 内的任意点。
静不定次数:静不定问题中,未知量的个数与独立的平 衡方程数目之差。
多余约束:与静不定次数对应的约束,对于结构保持静 定是多余的,因而称为多余约束。 关于静不定问题的基本解法将在材料力学中介绍。
P A m a B q
解:对象:梁 受力:如图 方程:
C
b
F F
0, FAx P cosq 0, FAx P cosq # FAy FB P sin q 0 1 y 0, M A F 0, m FBa Pa bsinq 0 2
B A
FR FR
x
A
B
FR
A、B 连线不垂直于x 轴
B A
FR
x
3.3 平面力系的平衡方程 “三矩式” M A = 0, MB = 0 , MC = 0。
C B A C B A
FR FR
满足第一式? 满足第二式? 满足第三式?
B A
FR
FR
A、B、C 三点不 在同一条直线上
C A
B
M (F ) 0 Fy 0
A
FQ (6 2) FP 2 FB 4 W (12 2) 0
FQ FA FP FB W 0
工程力学3-力系的平衡条件和平衡方程
例1 例1 求图示刚架的约束反力。
解:以刚架为研究对象,受力如图。
F x0:F A xq b0
P a A
q
b
F y0:F A yP0
P
MA(F)0:
MA
MAPa12q b2 0
FAx
A
FAy
q
解之得:
FAx qb
FAy P
MAPa 1 2qb 2
例2 例2 求图示梁的支座反力。
解:以梁为研究对象,受力如图。
坐标,则∑Fx=0自然满足。于是平面 平行力系的平衡方程为:
O
F2
x
F y 0 ; M O ( F ) 0
平面平行力系的平衡方程也可表示为二矩式:
M A ( F ) 0 ; M B ( F ) 0
其中AB连线不能与各力的作用线平行。
[例5] 已知:塔式起重机 P=700kN, W=200kN (最大起重量), 尺寸如图。求:①保证满载和空载时不致翻倒,平衡块
解: 1.分析受力
建立Oxy坐标系。 A处约束力分量为FAx和FAy ;钢 索的拉力为FTB。
解: 2.建立平衡方程
Fx=0
MAF= 0
- F Q 2 l- F W xF T Blsi= n0
FTB= FPlxs+ iF nQ2 l= 2FlWxFQ
FAx F TBco = s0
Fy=0
F A = x 2 F W x l F Q l co= s3 3 F lW 0xF 2 Q
[例1] 已知压路机碾子重P=20kN, r=60cm, 欲拉过h=8cm的障碍物。 求:在中心作用的水平力F的大小和碾子对障碍物的压力。
解: ①选碾子为研究对象 ②取分离体画受力图
工程力学力系平衡

D
FC
l
A B
l
FP
D
第 三 种 情 形
l
C FA A l FCy l B l FP D
FCx
C
FA A
l
B
l
FP
D
第 三 种 情 形
FCy
FCx C
E
MA ( F ) = 0 : FCx l -FP 2l = 0 MC ( F ) = 0 : -FA l - FP 2l = 0 ME ( F ) = 0 : -FCy 2l -FA l = 0
A
F =0
x
l -FQ -FW x FTB lsin=0 2 l FP x+FQ 2 = 2 FW x F FTB= Q lsin l
F =0
y
FAx FTB cos=0 FQ 2 FW x FQl FW FAx= x cos30 = 3 l 2 l FAy-FQ-FP+FTB sin=0
例题
均质方板由六根杆支 撑于水平位臵,直杆 两端各用球铰链与扳 和地面连接。板重为 P,在A 处作用一水 平 力 F , 且 F=2P , 不计杆重。求各杆的 内力。
简单的刚体系统平衡问题
前面实际上已经遇到过一些简单刚体系统 的问题,只不过由于其约束与受力都比较简单, 比较容易分析和处理。 分析刚体系统平衡问题的基本原则与处理 单个刚体的平衡问题是一致的,但有其特点, 其中很重要的是要正确判断刚体系统的静定性 质,并选择合适的研究对象
平衡方程
根据平衡的充要条件
F1 M1 O
z
F2
M2
y Mn
FR =0 , MO=0
力学中的平衡问题及解题方法

力学中的平衡问题及解题方法力学是物理学的一个重要分支,研究物体的运动和相互作用。
在力学中,平衡是一个关键概念,指的是物体在外力作用下保持静止或者匀速运动的状态。
解决平衡问题是力学学习的基础,本文将重点介绍平衡问题的概念及解题方法。
一、平衡问题概述在力学中,平衡是指物体的合力与合力矩均为零的状态。
合力指的是物体受到的所有力的矢量和,合力矩是指物体受到的所有力矩之和。
当一个物体处于平衡状态时,其合力为零,即物体受到的所有力相互抵消;合力矩也为零,即力矩的总和等于零。
通过解决平衡问题,我们可以推导出物体的受力关系及各个力的大小和方向。
二、解题方法解决平衡问题的思路和方法有很多,下面将介绍几种常用的方法。
1. 通过自由体图分析自由体图是解决平衡问题的重要工具。
通过将物体从整体中分离出来,将作用在物体上的力单独画在一张图上,即可更清晰地分析受力情况。
首先,选择心理上合适的参考点,计算该点的合力和合力矩,然后利用力的平衡条件和力矩的平衡条件,推导出物体的受力关系。
在绘制自由体图时,需要标注各个力的名称、大小和方向,以便更好地进行分析。
2. 利用转动平衡条件解题当物体可以绕某个轴进行转动时,我们可以利用转动平衡条件解题。
转动平衡条件是指物体的合力矩等于零,即物体受力矩的总和等于零。
通过将每个力的力矩与其距离乘积求和,然后令其等于零,我们可以解得物体的未知量。
在利用转动平衡条件解题时,需要注意选择正确的参考点和力臂的方向。
3. 使用迭加法解题迭加法是一种常用的解决力学问题的方法。
对于一个复杂的平衡问题,我们可以将其分解为多个简单的平衡问题来处理。
将物体逐步分解,每次只考虑其中的一部分受力情况,然后根据平衡条件解题。
最后通过迭代计算,得到物体的受力关系和未知量。
4. 运用静摩擦力解决问题在某些平衡问题中,静摩擦力起到重要的作用。
静摩擦力是指物体接触面上的摩擦力,当其超过一定程度时,可以阻止物体发生滑动。
通过利用静摩擦力的性质,我们可以解决涉及摩擦力的平衡问题。
工程力学第三章-力系的平衡

将上式两边向x、y、z 轴投影,可得平衡方程
F F F
可以求解3个未知量。
x y
z
0 0 0
• 2.平面汇交力系
力系的平衡
• 力偶系的平衡方程 • 1.空间力偶系
平衡的充要条件(几何条件) M Mi 0 将上式两边向x、y、z 轴投影,可得平衡方程
M M M
可以求解3个未知量。
ix iy iz
0 0 0
• 2.平面力偶系
力系的平衡
• 平衡的充要条件:力偶系中各力偶矩的代数和等于零.
m 0
i
• 任意力系的平衡方程 空间任意力系: • 平衡的充要条件:力系的主矢和对任一点的主矩均为零。
FR 0
MO 0
G3 a
e
G 3(a b) FNAb G1e G 2L 0 G 3(a b) G1e G 2L FNA 2 b
由(1)、(2)式 得:
G1 G2 L
G1e G 2L G3 ab
3
A FN A b
B FN B
(2)空载时
不翻倒条件:FNB≥0 (4) 由 mA 0 得:
FAB = 45 kN
600
y B TBC 15 15 30 TBD
0 0 0
x
C
D
150
B
300
TBD=G E
A
E
FAB G
解题技巧及说明:
1、一般地,对于只受三个力作用的物体,且角度特殊时用 几 何法(解力三角形)比较简便。 2、一般对于受多个力作用的物体,且角度不特殊或特殊, 都用解析法。 3、投影轴常选择与未知力垂直,最好使每个方程中只有一 个未知数。
工程力学第三章静力平衡问题

平面一般力系平衡方程还可表达为下列二种形式:
M
Fx A(F )
0
0
M B (F ) 0
M M
A B
(F (F
) )
0 0
MC (F ) 0
二力矩式
三力矩式
(AB不垂直于x轴) (A、B、C三点不共线)
注意:平衡方程中,投影轴和矩心可任意选取,可 写出无数个平衡方程。但只要满足了其中一组,其 余方程均应自动满足,故独立平衡方程只有三个。
矩心取在二未知力交点A 解处:,1力)矩画方整程体中受只力有图一。个未 知量F注C,意可B直C为接二求力解杆。。 2)取坐标,列平衡方程。
Fx=FAx-FCcos30=0
Fy=FAy+FCsin30-F-Fq=0
MA(F)=FCL/2-1.5F-FqL/2=0
FC
y
C
Fq=2q=1 kN
FAy
x
FAx 30
26
讨论:判断下述分析的正误。
FACy FAy
FACx
2a
M
3a
P
F
aA
MA
FAyFAx
FAx
B
B FABy
FABx
C
CP
A
FAx FAy
P
A
FFABAyy
A
FFAABxxFFAACyy
FACxx
FAx =F ; FAy =P ;
MA = M ?
MA = M+Fa-2Pa
固定铰的约束力作用于销钉上。 多杆用同一销钉连接,讨论某杆时, 须考虑各杆与销钉间作用的不同。
5
平面力系的平衡条件
平面一般力系处于平衡,充分和必要条件为力系
第3章 静力学平衡问题

FQ Cx FN
习题 3-11b 解图
取节点C为研究对象,见习题3-11b解图,
∑ Fy = 0 : F'BC cosα = FN
∴ FN
=
FP cosα 2 sin α
=
FP 2 tan α
=
3 × 15 2×2
= 11.25kN
3-12 蒸汽机的活塞面积为0.1m2,连杆AB长2m,曲柄BC长0.4m。在图示位置时, 活塞两侧的压力分别为p0=6.0×105Pa, p1=1.0×105Pa, ∠ABC=90D 。试求连杆AB作用于曲柄 上 的 推 力 和 十 字 头 A对 导 轨 的压力(各部件之间均为光滑接触)。
图(b):ΣMi = 0
∴ 由对称性知
FRB
=
M d
(←)
FRA
=
M d
(→)
FBy = FAy = 0
FBx
=
M d
M
FB
3-10 固定在工作台上的虎钳如图所示,虎钳丝杠将一铅垂力 F=800N 施加于压头上, 且沿着丝杠轴线方向。压头钳紧一段水管。试求压头对管子的压力。
习题 3-10 图
FNB
FNC FN
10
由几何关系得 cosα = 4500 = 0.9 , 5000
列平衡方程
sin α = 0.436
∑ MO (F ) = 0 : 2FA × 4500 −F Wcosα × 5000 +F Wsinα ×1250 = 0
解得 FA = 27.25 kN
∑ Fx = 0 : FOx = FW sin α = 27.03kN ∑ Fy = 0 : FOy = FW cosα − 2FA = 1.3kN
3章力系的平衡方程及应用

A
FAx
3m
P
1m
2m
由: 解得:
3 3FAy 3P 4 P 0 1
l
P1
FT 17.33kN FAx 15.01kN FAy 5.33kN
• 结果均为正,表明实际受力方向与假设方向相同。 • 为使平衡方程尽可能包含较少的未知量,避免联立求 解,通常将矩心取在两个未知力的交点。
M A (Fi ) 0 M B (Fi ) 0 M C (Fi ) 0
限制条件:A、B、C矩心不能在同一直线上(共线)。
y
C B A O
FR
因为平衡方程
满足,但不能排除图 示不平衡的情形。
x
3.1 空间任意力系的平衡条件和平衡方程
• 以上三种形式的平衡方程均为平衡的 必要与充分条件。
F X 0
x
F Y 0
y
•两个独立平衡方程,可以求解两个未知数。
3.1 空间任意力系的平衡条件和平衡方程 2. 空间平行力系的平衡方程
z
F1 F2
O x
y
F
iz
0
M x ( Fi ) 0
M y ( Fi ) 0
可以求解三个未知数。
F3
Fn F4
平面平行力系的平衡方程
3.1 空间任意力系的平衡条件和平衡方程
六个方程相互独立。联立,可求解六个未知量。 由平衡条件导出的方程称为平衡方程的基本形式。 • • 空间任意力系平衡方程:基本形式、四矩 应当注意:每一种形式最多只能列6个独立 式、五矩式和六矩式。
平衡方程,解6个未知数,任何多于6个的方程都
是这些方程的线性组合。
y
(Fi ) 0
工程力学03章静力学平衡问题
FP
l
l
FP
l
l
M
q
M
q
2l l
2l l
A
FAx A MA
解:1.选择研究对象。
FAy
2 受力分析,画出受力图如图所示。
8
2l l
FP
l
l
M
FAx
A MA
FAy
3. 建立平衡方程求解未知力 应用平衡方程
Fx = 0, FAx ql 0
q Fy = 0, FAy FP 0
MA= 0,
B
C
M1
A 60o
M2
60o D
20
解: 取杆AB为研究对象画受力图。
杆AB只受力偶的作用而平衡且C处为光滑面约束,则A 处约束反力的方位可定。
B
B FA = FC = F,
M1
A 60o
C
C AC = a
FC
Mi = 0
M2 M1
60o D A
FA
a F - M1 = 0
M1 = a F (1)
的各坐标轴上投影的代数和及所有力对
各轴之矩的代数和均等于零
Fx 0 Fy 0 Fz 0
M M
x y
(F ) (F )
0 0
M
z
(F
)
0
26
§3-3 简单的刚体系统平衡问题
一、刚体系统静定与静不定的概念
1、静定问题:一个静力平衡问题,如果系统中未知量 的数目正好等于独立的平衡方程数,单用平衡方程就 能解出全部未知量。
y
4. 联立求解,得
FAB 54.5KN FBC 74.5KN
工程力学第3章空间力系的平衡

计算量大,需要较高的数学水平。
几何法求解空间力系平衡问题
几何法
通过几何图形来描述物体的运动状态和受力 情况,通过观察和计算几何关系得到物体的 运动轨迹和受力情况。
优点
直观易懂,适用于简单运动和受力情况。
缺点
精度低,容易受到主观因素的影响。
代数法求解空间力系平衡问题
1 2
代数法
通过代数方程来描述物体的运动状态和受力情况, 通过解代数方程得到物体的运动轨迹和受力情况。
平衡方程形式
空间力系的平衡方程为三个平衡方程,分别表示力在x、y、z轴上 的平衡。
空间力系的平衡方程应用
解决实际问题
利用空间力系的平衡方程,可以 解决实际工程中的受力分析问题, 如梁的受力分析、结构的稳定性 分析等。
简化问题
通过将复杂的问题简化为简单的 空间力系问题,可以更方便地求 解问题。
验证实验结果
优点
适用范围广,可以用于解决各种复杂问题。
3
缺点
计算量大,需要较高的数学水平。
04
空间力系平衡问题的实例分 析
平面力系的平衡问题实例分析
总结词
平面力系平衡问题实例分析主要涉及二维空间中的受力分析,通过力的合成与分解,确定物体在平面内的平衡状 态。
详细描述
在平面力系中,物体受到的力可以分解为水平和垂直方向的分力。通过分析这些分力的合成与平衡,可以确定物 体在平面内的稳定状态。例如,在桥梁设计中,需要分析桥墩受到的水平风力和垂直压力,以确保桥墩的稳定性。
平衡条件
物体在空间力系作用下,满足力矩平衡、力矢平衡和 力平衡三个条件。
空间力系的简化
01
02
03
力矩
描述力对物体转动效应的 量,由力的大小、与力臂 的乘积决定。
材料力学工程构件静力学平衡问题

13
3.1 汇交力系的平衡条件和方程 平衡方程为:
-例题
sin F sin 0 Xi 0 , F CB AB 2
(4)
Y i 0
F cos F cos 0(5) N B CB AB , F 2
14
3.1 汇交力系的平衡条件和方程 由(4)和(5)解得:
26
3.3 平面一般力系的例题
例3-5 起重机水平梁AB,A处为固定铰链支座,DC为 钢索。已知梁重G1=2.4KN,电动小车与重物共重 G2=16KN,尺寸如图(a)所示。试求当电动小车 在图示位置时,钢索的拉力和铰链支座A的约束力。
27
3.3 平面一般力系的例题 解: 取梁AB为研究对象 分析受力,作用于梁AB的力,除其自重G1外,在B处 受载荷G2的作用,C处有钢索拉力FT,铰链支座A处的 约束力为FAx和FAy,受力图如图(b)所示。梁AB在 平面任意力系作用下处于平衡。
例3-1 如图a所示为一简单的起重设备。
-例题
AB和BC两在A,B,C三处用铰链连接。在 B处的销钉上装一不计重量的光滑小滑轮 ,绕过滑轮的起重钢丝绳,一端悬重为 G=1.5KN的重物,另一端绕在卷扬 机绞盘D上。当卷扬机开动时, 可将重物吊起,设AB和BC 两杆的自重不计,小滑轮 尺寸亦不考虑,并设重 物上升时匀速的, 试求AB杆和BC杆所受的力.
FAy为负值,表明受力图中FAy的实际指向与图中 的假设相反。
注:本题可用二矩式及三矩式平衡方程求解。取A、 C为矩心,二矩式平衡方程为
X 0 , F F cos 0 Ax T
M ( F ) 0 . 6 F sin 2 . 7 G 5 . 4 G 0 ,3 A T 1 2
第3章 静力学平衡问题

第3章 静力学平衡问题 §3.1 平衡与平衡条件一、平衡的概念物体的平衡,在工程上是指物体相对于地面保持静止或作匀速直线运动的状态。
平衡是相对于确定的参考系而言的。
静力学所讨论的平衡问题可以是单个刚体,也可以是由若干个刚体组成的刚体系统。
刚体或刚体系统是否平衡取决于作用在其上的力系。
二、平衡条件要使物体保持平衡状态,作用在其上的力必须满足一定的条件,这种条件我们称为力的平衡条件。
从效应上看,物体保持平衡应是既不移动,又不转动。
因此,力系的平衡条件是,力系的主矢和力系对任一点的主矩等于零。
其解析表达式称为平衡方程。
§3.2 平面力系的平衡方程一、平面力系的平衡方程1)基本形式⎪⎩⎪⎨⎧=∑=∑=∑0)(000F M Y X2)二矩式⎪⎩⎪⎨⎧=∑=∑=∑0)(0)(0F F B A M M X 附加条件为:A 、B 两点连线不垂直于x 轴3)三矩式⎪⎩⎪⎨⎧=∑=∑=∑0)(0)(0)(F F F C B A M M M 附加条件为:A 、B 、C 三点不共线特殊力系的平衡方程 1)共线力系:=∑i F2)平面汇交力系:⎩⎨⎧=∑=∑00Y X3)平面力偶系: 0i m =∑4)平面平行力系: )//( 0)(0轴y M Y i o F F ⎩⎨⎧=∑=∑§3.3 空间力系的平衡方程一、空间力系的平衡方程其基本形式的平衡方程为:ΣX=0 ΣM x(F)=0ΣY=0 ΣM y(F)=0ΣZ=0 ΣM z(F)=0必须指出,空间一般力系有六个独立的平衡方程可以求解六个未知量。
具体应用时,不一定使3个投影轴或矩轴互相垂直,也没有必要使矩轴和投影轴重合,而可以选取适宜轴线为投影轴或矩轴,使每一个平衡方程中所含未知量最少,以简化计算。
此外,还可以将投影方程用适当的力矩方程取代,得到四矩式、五矩式以至六矩式的平衡方程。
使计算更为简便。
几种特殊力系的平衡方程1)空间汇交力系ΣX=0ΣY=0ΣZ=02)空间力偶系ΣM x(F)=0ΣM y(F)=0ΣM z(F)=03)空间平行力系(若各力//z轴)ΣZ=0ΣM x(F)=0ΣM y(F)=04)平面任意力系(若力系在Oxy平面内)∑X==∑YM(=∑F)z§3.4 平衡方程的应用一、一般应用举例例3-1,例3-3,例3-4,例3-5(改求起重机不翻平衡块的重量就应是多少?),例3-6,例3-7 补充:已知:带轮D :D1=400 mm ,FT=2000 N ,Ft=1000 N ;齿轮C :D2=200 mm ,a=20° 求:齿轮C 的啮合力Fn ,轴承A 、B 的约束力FA 、FB轴承A 、B 的约束力FA 、FB 就是圆轴受支座中圆孔的约束力,圆孔销钉就是固定铰链两个分力 为说明两分力方向,建立空间直角坐标系Oxyz ?y 轮轴线,z 轴铅直,Oxy 是水平面,三轴垂直 轴承支座表示方法(下图),其约束两分力为xz 方向,用F Ax 、F Az 和F Bx 、F Bz ,或X A 、Z A 和X B 、Z B 侧视图(将轮轴及其受力投影到Oxz 平面上)受力图,没有画轴承A 、B 的约束力,因为没有解除这两个轴承约束=B M ∑02cos 2221t 1T =⨯⨯⨯D F D F D F n a --2000×200-1000×200-Fncos20°×100=0 Fn=2130 N主视图(将轮轴及其受力投影到Oyz 平面上)受力图,其中Fnz=Fncos20°=2130×0.9396=2000 N因主动力Fnz=2000 N 作用点到A 、B 两个支座距离相同,方向向上显然,与之平衡的两支座约束力大小相等,实际方向向下,和受力图所画的方向相反,所以N10002N 20002-====--nzB A F Z Z俯视图(将轮轴及其受力投影到Oxy 平面上) 受力图,其中Fnx=Fnsin20°=2130×0.3420=729 NΣMA=0 -(FT+Ft)×0.15+Fnx ×0.25-XB ×0.5=0 -(2000+1000)×0.15+729×0.25-XB ×0.5=0 XB=-536 NΣFx=0 -FT-Ft+XA-Fnx+XB=0 -2000-1000+XA-729+(-536)=0 XA=4265 N 结论:Fn=2130 NXA=4265 N ; XB=-536 N ZA=-1000 N ; ZB=-1000 N 小结:①轮轴类部件平面解法:1.侧视图求未知主动力 2.主视图求铅直向约束力 3.俯视图求水平向约束力在每一视图上,使用平面力系力的投影方程和力矩平衡方程求解未知力 ②皮带拉力,无论倾斜与否,总是和轮缘相切,对轮轴的力矩等于拉力乘以半径齿轮啮合力一定和其分度圆不相切,对轮轴的力矩=啮合力×cosa ×半径(啮合力×cosa=圆周方向分力)③侧视图上没有画轴承A 、B 的约束力,因为没有解除两个轴承约束(若画有XA 、ZA 和XB 、ZB 四力) 不能用ΣFx=0,-FT-Ft-Fnsina=0求Fn ,因为在x 方向,实际上还有XA 、XB 两力的投影 二、重心1、物体的重心物体的重量(力):物体每一微小部分地球引力的合力。
理论力学第三章 任意力系的简化与平衡条件

例3-2 已知:涡轮发动机叶片轴向力F=2kN,力偶矩
M=1kN.M, 斜齿的压力角=20 ,螺旋角 。 =10 ,齿轮节圆半径 r=10cm。不计发动 机自重。 O1O2=L1=50cm, O2A=L2=10cm. 求: FN, O1,O2处的约束力。
。
第三章 力系的简化与平衡条件
§3-5 力系的平衡条件
3
F2 F3
1
F'
F1
1 O 200 1
x
2
1 3 1 FRy F1 F2 F3 = -161.6(N) 2 10 5
第三章 任意力系的简化与平衡条件
§3-4 力系简化计算
解:(1)先将力系向O点简化,求主矢和主矩。 FRx FRy =466.5(N) 2 2 FR
Xi 0 F x F2x Fr 0 1
F y F2y F 0 1
Zi 0
F z Fa F 0 1
第三章 力系的简化与平衡条件
§3-5 力系的平衡条件
例3-2 解: 3、列平衡方程
Mx (F) 0
F2 y L1 F (L1 L2 ) 0
y
100 1
F
80
3
Байду номын сангаас
F2 F3
1
F'
F1
1 O 200 1
x
2
第三章 任意力系的简化与平衡条件
§3-4 力系简化计算
例3-1 (1)先将力系向O点简 解: 化,求主矢和主矩。 1 1 F2 FRx F1 10 2 2 F3 5 = -437 .6(N)
y
100 1
F
理论力学 陈立群 第3章 平衡问题 解答
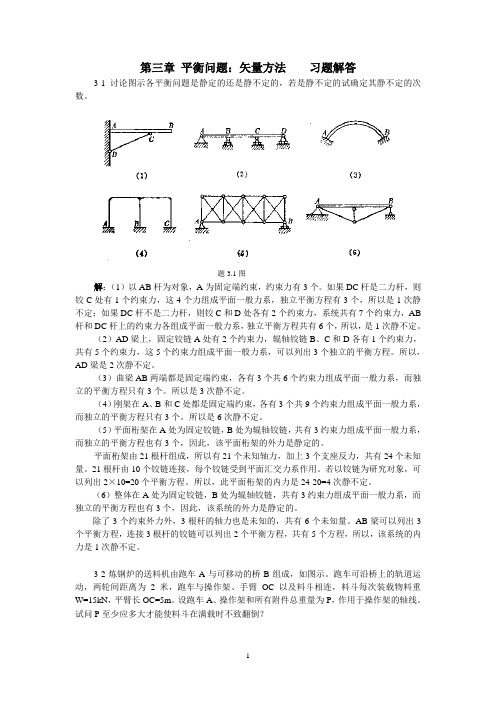
第三章平衡问题:矢量方法习题解答3-1讨论图示各平衡问题是静定的还是静不定的,若是静不定的试确定其静不定的次数。
题3.1图解:(1)以AB杆为对象,A为固定端约束,约束力有3个。
如果DC杆是二力杆,则铰C处有1个约束力,这4个力组成平面一般力系,独立平衡方程有3个,所以是1次静不定;如果DC杆不是二力杆,则铰C和D处各有2个约束力,系统共有7个约束力,AB 杆和DC杆上的约束力各组成平面一般力系,独立平衡方程共有6个,所以,是1次静不定。
(2)AD梁上,固定铰链A处有2个约束力,辊轴铰链B、C和D各有1个约束力,共有5个约束力,这5个约束力组成平面一般力系,可以列出3个独立的平衡方程。
所以,AD梁是2次静不定。
(3)曲梁AB两端都是固定端约束,各有3个共6个约束力组成平面一般力系,而独立的平衡方程只有3个。
所以是3次静不定。
(4)刚架在A、B和C处都是固定端约束,各有3个共9个约束力组成平面一般力系,而独立的平衡方程只有3个。
所以是6次静不定。
(5)平面桁架在A处为固定铰链,B处为辊轴铰链,共有3约束力组成平面一般力系,而独立的平衡方程也有3个,因此,该平面桁架的外力是静定的。
平面桁架由21根杆组成,所以有21个未知轴力,加上3个支座反力,共有24个未知量。
21根杆由10个铰链连接,每个铰链受到平面汇交力系作用。
若以铰链为研究对象,可以列出2×10=20个平衡方程。
所以,此平面桁架的内力是24-20=4次静不定。
(6)整体在A处为固定铰链,B处为辊轴铰链,共有3约束力组成平面一般力系,而独立的平衡方程也有3个,因此,该系统的外力是静定的。
除了3个约束外力外,3根杆的轴力也是未知的,共有6个未知量。
AB梁可以列出3个平衡方程,连接3根杆的铰链可以列出2个平衡方程,共有5个方程,所以,该系统的内力是1次静不定。
3-2炼钢炉的送料机由跑车A与可移动的桥B组成,如图示。
跑车可沿桥上的轨道运动,两轮间距离为2米,跑车与操作架、手臂OC以及料斗相连,料斗每次装载物料重W=15kN,平臂长OC=5m。
第三章 物体系统的平衡(黄安基书) (2)
课程:理论力学
第三章
物体系统的平衡问题
§3-1 物体系统的平衡问题
物体系:由几个物体通过一定的约束方式联系在 一起的系统。
2 kN/m D E 2m 2.5m 1.5m 4.5m G
20 kN
A B 3m 3m 1.5m C
10 kN
课程:理论力学
第三章
物体系统的平衡问题
1. 内力和外力 外力:系统以外的物体给所研究系统的力。
A E q B D F
FC
C
2 MC (F ) 0, Fa 1.5qa 3FAy FAxa 0
解得
FAy F 1.5qa 3FAy 5500 N
课程:理论力学
第三章
物体系统的平衡问题
再取AEB为研究对象,考虑到DE为二力杆,AEB FAy 受力如图所示。
课程:理论力学
第三章
物体系统的平衡问题
木桁架节点
榫(sun)接
课程:理论力学
第三章
物体系统的平衡问题
钢桁架节点
焊接
铆接
课程:理论力学
第三章
物体系统的平衡问题
钢筋混凝土桁架节点
刚接
课程:理论力学
第三章
物体系统的平衡问题
4、桁架分析目的 (1) 截面形状和尺寸设计 (2) 材料选取 (3) 强度校核 二、模型的建立 屋架结构的简化
的受力情况,画出受力图。
根据受力图的力系类型,可知各有几个独立的平 衡方程,如平面一般力系有三个独立的平衡方程等。 总计独立平衡方程数,与问题中未知量的总数 相比较。 若未知量总数超过独立的平衡方程总数,则问 题是超静定的。
课程:理论力学
第三章
物体系统的平衡问题
理论力学第3章力系平衡方程及应用

a
分布力(均布载荷) 合力作用线位于AB
中点。
3.1 平面力系平衡方程
a
【解】
y M=qa2 a
2qa
F3
C
FAx
A
aFAy
45
B
D
x
2a FB a
F3 2qa
MA 0
q 2 2 a q a a F B 2 a 2 q sa 4 i 3 n a 5 0
FB 2qa
Fx 0 FAx2qcao4s50 FAx qa
C
【解】 F2
构件CGB( 图b)
F2
构件AED
(图c)
C
R
D
45
FC
FD
D
G
45
F1
E
a
F1
E
a
A
B
G 图b
FBy
图c A FAx
MA
FAy
构件CD(图a )
3个未知量 B FBx
4个未知量
F'C
3个独立方程
3个独立方程
【基本思路】
C R
杆CGB受力图计算FCAED受力图
计算A处的反力(偶);CGB受力图计算
3.2 平面物体系平衡问题
q
C
B
30
FC FBy
l
l
【解】 杆CB
FBx
MB 0
FCco3s0l qll/2 0
FC
3 ql 30.5kN/m 2m 0.577kN
3
3
3.2 平面物体系平衡问题
【解】整体
FAy
l
l
l
Fx 0
MA
A
FAx
理论力学-第3章 静力学平衡问题
平衡方程的应用
例题2
平面刚架的所有外力的作用线都 位于刚架平面内。A处为固定端约束。 若图中q、FP、M、l等均为已知,试 求: A处的约束力。
平衡方程的一般形式
对于作用在刚体或刚体系统上的任意力系,平衡条件的 投影形式为
z F2
FRx Fix 0
M2
FRy Fiy 0
F1
FRz Fiz 0
M1
x
y O
Mn
Fn
MOx MOx Fi 0 MOy MOy Fi 0 MOz MOz Fi 0
任意力系的平衡方程
Mx F 0 My F 0 Mz F 0
任意力系的平衡方程
平衡方程的一般形式
Fx 0 Fy 0 Fz 0
Mx F 0 My F 0 Mz F 0
上述方程表明,平衡力系中的所有力在直角坐标系各轴 上投影的代数和都等于零;同时,平衡力系中的所有力对各 轴之矩的代数和也分别等于零。
平面力系平衡方程的其他形式
zO
Fx = 0,
y
Fy = 0,
MO= 0
上述平面力系的3个平衡方程中的
Fx = 0 Fy = 0
可以一个或两个都用力矩式平衡方程代替,但 所选的投影轴与取矩点之间应满足一定的条件。
任意力系的平衡方程
平面力系平衡方程的其他形式
平面一般力系平衡方程的其他形式:
q(x)
q(x)
FP2
FP5
M(x)
M1
x
FQ(x) dx dx
FP1
FP3
M2
FP4
FP6
平衡与平衡条件
平衡的概念
局部 对于变形体:组成物体的任意一部分。
平衡与平衡条件 平衡的必要条件
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例题 3-5 图示平面刚架的支反力。
解:以刚架为研究对象,受 力如图,建立如图坐标。
Fx 0 : FA cos P 0
Fy 0 : FA sin FB 0
P
4m
A
B
8m
y
P
由几何关系
sin 5 , cos 2 5
5
5
A B
x
FA
FB
解得
FA
5 2
P, FB
1 2
P
例题 3-6 利用铰车绕过定滑轮B的绳子吊起一重P=20kN
FAx FAy 2a
C a
q 2a a Me FNB 4a 0
4a
解得
(b)
FAx 0,
FN B
1 qa 2
Me 4a
,
FAy
3 q a Me
2
4a
.
Me Bx
D
FNB
例例题1 3-2 求图示刚架的约束反力。
P
a
解:以刚架为研究对象,受力如图。 A
Fx 0 : FAx qb 0
FPl
ql
3l 2
0
由此解得 FAx ql
FAy FP
M
A
M
FPl
3 2
ql 2
二、平面一般力系平衡方程的其它形式
y
F2
F4
F1
M
F3 F5
(a)
x
M
Fx 0 A(F)
0
M
B
(F
)
0
y
F R =0
B A
(b)
x
二力矩式 (AB不垂直于x轴)
y
F2
F4
F1
M
F3 F5
(a)
x
y
F R=0
M
C
FC
Fx 0 Fy 0 MA 0
FBx 0
FBy qa Fc 0
qa
a 2
M
Fc
2a
0
q
M
1、再以AB梁为研究对象 A
C
B
a
a
a
a
Fx 0
MA
FAx
FAy
A
a
FAx FBx 0
q
a
B FB′x F′By
Fy 0 MB 0
FAy qa FBy 0
M
A
qa
3a 2
FBy’
FA
A
A
M1
M1
M2 L
M3
M2 L
M3
B
B
FB
解:取工件为研究对象、画受力图。 解得
由 Mi=0 FA l M1 M2 M3 0
FA FB 200N m
例题 3-9 不计自重的杆AB与DC在C处为光滑接触,
它们分别受力偶矩为M1与M2的力偶作用 ,转向如图。 问M1与M2的比值为多大,结构才能平衡?
2a
0
FC
qa 4
M 2a
FBy
3qa 4
M 2a
FAy
7qa 4
M 2a
M A 3qa2 M
2-4 物体系统平衡问题
例题 3-11 如图所示的三铰拱桥由两部分组成,彼此
用铰链A联结,再用铰链B和C固结在两岸桥墩上。每 一部分的重量P1=40 KN,其重心分别在点D和E点。 桥上载荷P=20KN。求A、B、C 三处的约束力。
第 3 章 静力学平衡问题
§3-1 平面力系的平衡条件与平衡方程 §3-2 简单的空间力系平衡问题 §3-3 简单的刚体系统平衡问题 §3-4 考虑摩擦时的平衡问题
§3-1 平面力系平衡条件与平衡方程 一、平面一般力系的平衡条件与平衡方程
y
F2
F4
F1
y
n
F R
FR Fi
O
i 1
O
F3 F5
(a)
值为M的力偶作用在折杆AB上,求支承处的约束力大小。
2L
B
LM A
解: 由 Mi=0
2L
LM
B FB
A FA
FA l M 0
FA
FB
M l
例题 3-8 工件上作用有三个力偶如图所示。已知:
M1= M2= 10N·m, M3 =20N·m,固定螺栓A和B的距
离l=200mm。求两光滑螺栓所受的水平力。
Fy 0 : FBC sin 300 FT1 FT 2 cos 300 0
y
4. 联立求解,得
FAB 54.5KN FBC 74.5KN
FAB B
x
30°
FBC FT2 30°FT1
反力FAB 为负值,说明该力实际指向与图上假 定指向相反。即杆AB 实际上受拉力。
例题 3-7 折杆AB的支承方式如图所示,设有一力矩数
M
C
a
2-4 物体系统平衡问题
研究方法 一: 整体到局部
1.取整体为研究对象
MA
FAy
A
FAx
a
q
B
a
a
M
C
a FC
Fx 0
FAx 0
Fy 0 FAy FC 2qa 0
M A 0 M A FC 4a 2qa2a M 0
2-4 物体系统平衡问题
2. BC 梁为研究
Fx 0
求解力系平衡问题的方法和步骤。 (1)选取研究对象; (2)分析研究对象受力,画受力图;
(3)根据力系的类型列写平衡方程;选取适当的 坐标轴和矩心,以使方程中未知量个数最少;尽可 能每个方程中只有一个未知量。
(4)求解未知量,分析和讨论计算结果。
例题 3-1 图示简支梁AB,梁的自重及各处摩擦均
A a
q
B
a
a
q
FBx B FBy
FBx 0
M
C
a
M
C
FC
Fy 0 MB 0
FBy qa Fc 0
பைடு நூலகம்
qa
a 2
M
Fc
2a
0
FC
qa 4
M 2a
FBy
3qa 4
M 2a
FAy
7qa 4
M 2a
M A 3qa2 M
研究方法二: 局部到局部
A a
q
B
a
a
M
C
a
1、 BC 梁为研究
q FBx B FBy
x
MO
n
Mo Mo (Fi )
(b)
x
i 1
平面一般力系平衡的必要与充分条件是力系的主矢和对任意一
点的主矩同时等于零。这一条件简称为平衡条件。 n
n
Fix 0
FR Fi 0 i 1 n
因为
FR
FRx 2 FRy 2
Fix 2 Fiy 2
i 1
n
Fiy 0
i 1
Mo Mo (Fi ) 0 i 1
选整体 为研究 对象画 受力图, 列平衡 方程
选局部为 研究对象 画受力图, 列平衡方 程求解。
检 查 结 果, 验 算
注意:
力偶 M 在任一轴上的投影为零; 力偶对任一点之矩即为M。 选取适当的坐标轴和矩心,注意正负号。
方法二:局部
局部
弄清 题意, 标出 已知 量
选局部 为研究 对象画 受力图, 列平衡 方程
的货物,滑轮由两端铰链的水平刚杆AB 和斜刚杆BC 支持于点
B (图(a) )。不计滑轮的自重,试求杆AB 和BC 所受的力。
A
B
30°
30°
C
P
y
FAB B
x
30°
FBC FT2 30° FT1
解:1. 取滑轮B 连同销钉作为研究对象。
2. 画出受力图
3. 列出平衡方程:
Fx 0 : FBC cos 300 FAB FT 2 sin 300 0
P
1m 3m
4m 1m
D
4m
P1
B
A
E
P1
C
10m
P
1m 3m
4m 1m
解:1.取整体为研究对象
D
4m
P1
B
A
E
P1
C
10m
1m 3m P 4m 1m
Fx 0,FBx FCx 0 Fy 0,FBy 2P1 P FCy 0
MB 0 ,
D
A
E
4m
P1
P1
B
FBy
F F Bx 10m Cx
不计。试求A和B处的支座约束力。
y
q
q
Me
A
BA
C
D
2a
a
FAx FAy 2a
C a
4a
4a
(a)
(b)
解:
(1)选AB 梁为研究对象。 (2)画受力图如右图所示。
Me Bx
D
FNB
(4) 列平衡方程
Fx 0 FAx 0
y q
Fy 0 FAy q 2a FNB 0 A
Mo(F) 0
P1 1 4P 9P1 10FCy 0
解得:
C
FCy
FCy 48KN FBy 52KN
P
1m 3m
4m 1m
2.取AC部分为研究对象:
D
4m
P1
B
A
E
P1
C
10m
FAx
A
FAy
E
P1
C
FCx
Fx 0,FAx FCx 0
Fy 0,FAy P1 FCy 0
MA 0 ,
4FCx (4 1)FCy 4P1 0