电机正反转程序
三相异步电动机正反转控制

三相异步电动机正反转控制简介三相异步电动机是工业中常用的电动机之一,它具有运行平稳、结构简单、维护方便等优点,在很多领域都得到了广泛应用。
正反转控制是三相异步电动机的基本控制方式之一,通过控制电机的供电方式,可以使电动机实现正向运行和反向运行。
本文将介绍三相异步电动机正反转控制的原理、方法和实现步骤。
原理三相异步电动机的正反转控制实际上是通过改变电源的供电方式来实现的。
电动机的运行方向由电动机的线圈接线方式决定,通常有两种常见的接线方式:正转接线和反转接线。
在正转接线方式下,电动机的三相线圈与电源的三相电压相位相同,电流正弦波形一次通过电动机的三相线圈,从而使得电动机正向旋转。
在反转接线方式下,电动机的三相线圈与电源的三相电压相位相反,电流正弦波形一次通过电动机的三相线圈,从而使得电动机反向旋转。
通过切换电源的供电方式,可以实现电动机的正反转控制。
方法实现三相异步电动机的正反转控制有多种方法,常见的方法有以下几种:1. 交叉接线法交叉接线法是最简单的正反转控制方法之一。
通过将电动机的两个相互对换的线圈连接到电源的正确相位,可以实现电动机的正反转。
在正转时,将电源的L1和L3相连接到电动机的U、V线圈上,将电源的L2相连接到电动机的W线圈上。
在反转时,将电源的L1和L3相连接到电动机的W、V线圈上,将电源的L2相连接到电动机的U线圈上。
2. 利用接触器控制利用接触器控制是一种较为常见的正反转控制方法。
通过控制接触器的通断,可以改变电动机的供电方式,实现正反转控制。
正转时,接触器的U1、V1、W1触点闭合,U2、V2、W2触点断开。
反转时,接触器的U1、V1、W1触点断开,U2、V2、W2触点闭合。
3. 使用可编程控制器(PLC)PLC(Programmable Logic Controller)是一种数字化电子设备,可用于自动化控制系统。
使用PLC控制电动机的正反转可以实现更为灵活的控制。
通过PLC编程,可以控制电源的供电方式,实现电动机的正反转。
直流电机正反转的方法
直流电机正反转的方法
直流电机的正反转可以通过改变电机的电流方向来实现。
下面是两种常见的实现方法:
1. 反极性法:通过反转电源的正负极性来改变电流的方向。
将直流电源的正极连接到电机的正极,负极连接到电机的负极,电流流向与电机转动方向一致。
如果需要反向转动,只需将电源的正负极性互换即可。
2. 反接法:将电机的两个输入端交换连接。
将电池或直流电源的正极直接连接到电机的一个输入端,再将负极连接到另一个输入端,电流方向变化,电机反向旋转。
无论采用哪种方法,都需要注意电机和电源的额定电压与电流,以保证正常运行和安全性。
同时,正确选择合适的开关和控制装置也是确保电机正反转的关键。
在实际应用中,常使用电机控制器或驱动器来实现方便、精确的正反转控制。
电动机正反转工作流程
电动机正反转工作流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!电动机正反转工作流程。
正转工作:1. 电源接入,向电动机接入电源,为其提供电能。
电动机正、反转控制电路的PLC程序设计举例
电动机知识电动机正、反转控制电路的PLC程序设计举例在例一的基础上,如果希望实现三相异步电动机的可逆运行,只需增加一个反转控制按钮和一个反转控制的接触器KM2即可。
其相对应的元件安排如下:在梯形图设计上可以考虑选两套起—保—停电路,一个用于正转,一个用于反转,考虑正反两个接触器不能同时接通,在两个接触器的驱动支路中分别串入对方的常闭触点来达到“互锁”的目的。
其相应的控制梯形图如图1所示:程序清单:图1 电动机正、反转控制电路的PLC梯形图程序——双重输出线圈〃电动机断相的一种自动保护方法〃济南钢铁晃电解决方案----FS/E防晃电系〃用PLC改进鼠笼式异步电动机的控制方案〃电气设计中低压交流接触器选用〃电气设备维修方法与实践〃施耐德LC1交流接触器选型*参数〃通过变频器操作面板控制电动机的启动、〃接触器联锁的正反转控制线路原理分析〃双华ZNB-S电动机正反转电路图_电路图〃电动机正反转实物接线图_电路图〃多台电机并联同步运行方案〃用接触器进行电机正反转控制_电路图〃电动机正反转控制电路图_电路图〃交流接触器接线图_电路图〃按钮接触器复合联锁的电动机正反转控制〃液压泵驱动电机的故障〃达尔文系统在汽车行业的应用----SmartWDomain: dnf辅助More:d2gs2f 〃什么是自锁电路.它的用途和原理_电路〃交流接触器接线图〃中低压交流接触器的选用〃交流接触器的使用类别及注意事项〃用三个接触器实现星三角启动原理图〃仿真三相异步电动机正反转运行状态的电〃ABBIORC型拍合式接触器在首钢二炼钢350〃晃电与自起动的区别〃印刷设备中交流接触器的选用〃台安SG2智能控制单元在自动扶梯上的应收录时间:1380248141 作者:匿名随着起重机的不断发展,传统控制技术难以满足起重机越来越高的调速和控制要求。
在电子技术飞速发展的今天,起重机与电子技术的结合越来越紧密,如采用PLC取代继电器进行逻辑控制,交流变频调速装置取代传统的电动机转子串电阻的调速方式等。
电动机正反转PLC控制课件
四、控制逻辑仿真
拨动开关2: “I0.2〞指示灯亮,反转按钮按下 “Q0.0〞指示灯灭,表示电机停顿, 经过10S延时, “Q0.1〞指示灯亮,电机反转运行。
四、控制逻辑仿真
拨动开关1: “I0.1〞指示灯亮,正转按钮按下 “Q0.1〞指示灯灭,表示电机停顿, 经过20S延时, “Q0.0〞指示灯亮,电机正转运行。
主要内容:
1.电动机正反转控制线路 2.硬件接线 3.程序编写 4.控制逻辑仿真
一、电动机正反转控制线路
一、电动机正反转控制线路
二、PLC接线
二、PLC接线 〔一〕PLC电源
二、PLC接线 〔二〕控制接线
KM1、KM2-交流接触器
的线圈
SB1-停顿按钮 SB2
-正传按钮 Βιβλιοθήκη B3-反传按钮FR-热继电
三、程序编写
三、程序编写
三、程序编写
四、控制逻辑仿真
四、控制逻辑仿真
首先导出程序,从菜单命令“文件->导出…〞导 出后缀为“awl〞的文件“电动机正反转控制.awl 〞。 程序导出后,翻开S7-200仿真程序装入程序, 然后开场进展仿真。
导出:导出的程序供给仿真程序或PLC使用。 保存:保存的程序只能给编程软件使用。
器的常闭触点
三、程序编写
三、程序编写
启动STEP 7 MicroWin 4.0,建立工程“电动 机正反转控制〞,输入控制梯形图。
控制要求: 1.按下正传按钮,如果电机停顿立即启动,否 那么先停顿10S钟,再启动。
2.按下反传按钮,如果电机停顿立即启动,否 那么先停顿10S钟,再启动。
3.按下停顿按钮,电机立即停顿。
四、控制逻辑仿真
程序装载完成后,运行仿真程序,CPU上的运 行“run〞指示灯亮。
三相异步电动机的正反转控制

U ---L3 V ---L2 W---L1
KM2 KM1
KM1 KM2
三、按钮、接触器双重联锁正反转控制线路
QS FU1
L1 L2 L3
合上电源 开关QS
KM1
FU2 FR
SB3
KM2
KM1
KM2
SB1
SB2
FR
UV W
M 3~
KM2 KM1
KM1 KM2
三、按钮、接触器双重联锁正反转控制线路
KM2联锁动断触
UV W
点闭合,解除对
M
KM1联锁
3~
SB3
KM2
SB1
KM1
KM2 SB2
KM2
KM1
KM1
KM2
二、接触器联锁正反转控制线路
反转停止
QS FU1
FU2
L1
L2
FR
L3
松开SB3、电 KM1 机停转
SB3 KM2
SB1 KM1 SB2 KM2
FR
UV W M 3~
KM2
KM1
KM1
三相异步电动机的 正反转控制线路
若改变电动机转动方向,将接至交流电动机 的三相交流电源进线中任意两相对调,电动机就 可以反转。
一、 倒顺开关正反转控制线路
倒顺开关,又叫可 逆转换开关,利用 改变电源相序来实 现电动机手动正反 转控制。
一、倒顺开关正反转控制线路
L1 L2 L3
熔断器 倒顺开关
电动机
正转起动
QS FU1
FU2
L1
L2
FR
L3
合上电源开关 KM1 QS
SB3 KM2
SB1 KM1 SB2 KM2
电动机的正反转PLC控制

02
输出设备
接触器线圈,用于控制电动机的正反转。
03
接线方式
根据PLC的输入输出端口配置,将按钮开关接入PLC的输入端口,将接
触器线圈接入PLC的输出端口,并确保接线正确、牢固。
正反转控制程序的编写
编程语言
使用PLC的编程语言,如Ladder Logic、Structured Text等,根据 控制要求编写程序。
重要性
在工业自动化生产线上,电动机的正反转控制是实现各种机械运动和自动化操作的关键 环节。
电动机正反转控制的电路原理
电路组成
主要包括电源、电动机、接触器、热继电器、按钮等部分组成。
工作原理
通过改变接触器主触点的状态,来改变电动机输入电源的相序,从而控制电动机的旋转方向。
电动机正反转控制的逻辑控制原理
控制逻辑
根据输入信号(正转、反转、停 止)编写相应的控制逻辑,通过 逻辑运算实现电动机的正反转控 制。
安全保护
在程序中加入必要的安全保护措 施,如互锁、急停等,确保设备 和人身安全。
程序调试与运行
调试步骤
01
通过模拟输入信号测试程序的正确性,检查电动机的正反转是
否符合控制要求,并调整程序中的参数以满足实际需求。
控制逻辑
通过PLC(可编程逻辑控制器)对电动机 的正反转进行控制,实现自动化操作。
VS
控制流程
输入信号→PLC内部程序处理→输出信号 →驱动接触器动作→电动机旋转方向改变 。
03
PLC实现电动机正反转控 制
输入输出设备配置与接线
01
输入设备
正转按钮、反转按钮、停止按钮,选择合适的按钮类型以满足控制需求。
安全注意事项
02
电机正反转简单程序

电机正反转简单程序引言电机正反转是在许多电气控制和机器人领域中常见的需求。
通过编写简单的程序,我们可以实现对电机的正向和反向旋转控制。
本文将介绍如何编写一个简单的程序来实现电机的正反转。
什么是电机正反转?在控制电机时,正反转是指改变电机的旋转方向。
电机正转是指电机按照设定的方向进行旋转,而电机反转则是电机按照相反的方向进行旋转。
通过控制电机的正反转,我们可以实现精确的运动控制和机器人运动的调整。
电机正反转的原理电机正反转的实现原理基于电机的构造和控制电路。
常见的电机类型包括直流电机和交流电机。
无论是直流电机还是交流电机,它们的正反转控制原理都是通过控制电极之间的电流流向来实现的。
在直流电机中,通过改变直流电源的电极连接方式,可以改变电流在电机绕组中的流向,从而改变电机的旋转方向。
在交流电机中,可以通过改变电机的相序来改变绕组中电流的流向,进而改变旋转方向。
编写电机正反转程序的步骤编写电机正反转程序的步骤主要包括以下几个方面:1. 确定电机类型和控制方式首先,我们需要确定使用的电机类型和控制方式。
根据不同的电机类型和控制方式,编写电机正反转程序的方法会有所不同。
例如,直流电机的正反转控制需要改变电机电极的连接方式,而交流电机的正反转控制需要改变电机的相序。
2. 确定控制电路和接口在编写程序之前,我们需要确定控制电路和接口。
控制电路和接口用于将控制信号传输到电机,从而实现对电机正反转的控制。
常见的电机控制电路和接口包括H桥电路、驱动模块和微控制器。
3. 编写程序根据电机类型和控制方式,我们可以编写相应的程序。
程序的主要任务是向电机发送控制信号以实现正反转。
在编写程序时,需要根据电机的规格和特性设置合适的参数,如电机转速、转向等。
4. 测试和调试完成程序编写后,我们需要进行测试和调试,以确保程序能够正常运行。
在测试和调试过程中,我们可以通过观察电机的转动方向和速度来验证程序的正确性。
如果程序存在问题,可以对程序进行调试和修改。
单片机控制步进电机正反转的实际应用程序
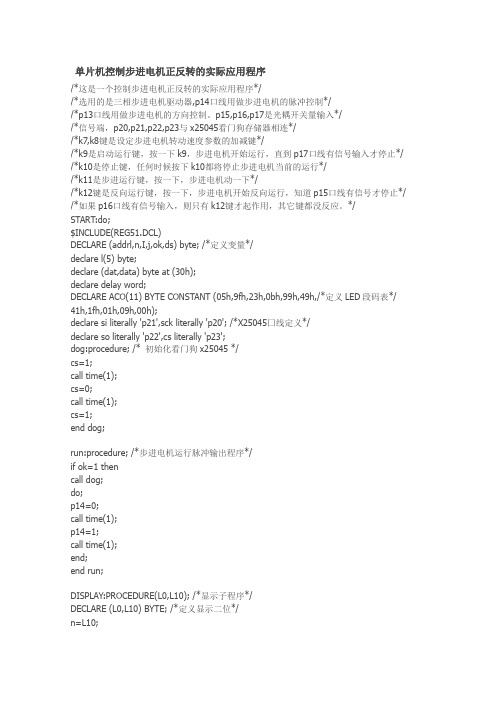
单片机控制步进电机正反转的实际应用程序/*这是一个控制步进电机正反转的实际应用程序*//*选用的是三相步进电机驱动器,p14口线用做步进电机的脉冲控制*//*p13口线用做步进电机的方向控制。
p15,p16,p17是光耦开关量输入*//*信号端,p20,p21,p22,p23与x25045看门狗存储器相连*//*k7,k8键是设定步进电机转动速度参数的加减键*//*k9是启动运行键,按一下k9,步进电机开始运行,直到p17口线有信号输入才停止*/ /*k10是停止键,任何时候按下k10都将停止步进电机当前的运行*//*k11是步进运行键,按一下,步进电机动一下*//*k12键是反向运行键,按一下,步进电机开始反向运行,知道p15口线有信号才停止*/ /*如果p16口线有信号输入,则只有k12键才起作用,其它键都没反应。
*/START:do;$INCLUDE(REG51.DCL)DECLARE (addrl,n,I,j,ok,ds) byte; /*定义变量*/declare l(5) byte;declare (dat,data) byte at (30h);declare delay word;DECLARE ACO(11) BYTE CONSTANT (05h,9fh,23h,0bh,99h,49h,/*定义LED段码表*/ 41h,1fh,01h,09h,00h);declare si literally 'p21',sck literally 'p20'; /*X25045囗线定义*/declare so literally 'p22',cs literally 'p23';dog:procedure; /* 初始化看门狗x25045 */cs=1;call time(1);cs=0;call time(1);cs=1;end dog;run:procedure; /*步进电机运行脉冲输出程序*/if ok=1 thencall dog;do;p14=0;call time(1);p14=1;call time(1);end;end run;DISPLAY:PROCEDURE(L0,L10); /*显示子程序*/DECLARE (L0,L10) BYTE; /*定义显示二位*/n=L10;n=aco(n); /*十位数BCD码译成段码*/sbuf=n; /*十位数送164显示*/do while ti=0; /*等待发送结束*/call dog; /*看门狗定时器复位*/end;n=L0;n=aco(n);sbuf=n; /*个位数送164显示*/do while ti=0;call dog;end;end display;outbyt: procedure(da); /*向看门狗存储器写入一字节*/ declare (i,da) byte;j=da; /*将要写入的字节赋给临时变量J */do i=0 to 7; /*左移8位,送到口线si */sck=0;j=scl(j,1);si=cy;sck=1; /*每移一位数据,跟一个时钟信号*/end;end outbyt;inbyt: procedure; /* 从看门狗存储器读出一字节*/ declare (i,di) byte;j=0;do i=0 to 7;sck=1;sck=0;cy=so;j=scl(j,1); /*从看门狗存储器读出一字节送入临时变量j*/ end;dat=j;end inbyt;wrenable: procedure; /* 置看门狗写使能*/sck=0;cs=0;; /* write enable command */call outbyt(06h); /* x25045 写使能指令06h */cs=1;sck=0;end wrenable;wrdisable: procedure; /* 置看门狗写禁止*/sck=0;cs=0;; /* write disable command */call outbyt(04h);sck=0;cs=1;end wrdisable;wrregister: procedure; /* 写状态寄存器*/sck=0;cs=0;dat=01h; /* write register command */call outbyt(dat);; /* 00h--1.4S, 20h--200MS, 10h--600MS, 30h--disable Wdog */ call outbyt(00h); /* 设定看门狗定时时间*/;sck=0;cs=1;call time(200); /* wait to complete writting cycle */end wrregister;rdregister:procedure; /* 读看门狗状态寄存器*/sck=0;cs=0;; /* register read command */call outbyt(05h);call inbyt; /* status register read in <DAT> */sck=0;cs=1;end rdregister;wbyte:procedure; /* 看门狗存储器字节写入子程序*/ declare comm byte;sck=0;cs=0;comm=02h; /* 写指令02h */call outbyt(comm);call outbyt(addrl);call outbyt(dat); /* send one byte data to X25043 */cs=1;sck=0;call time(150);end wbyte;rbyte:procedure; /*看门狗存储器字节读出子程序*/declare comm byte;sck=0;cs=0;comm=03h; /* read command */call outbyt(comm);call outbyt(addrl);call inbyt; /* read one byte to <DAT> */sck=0;cs=1;end rbyte;incdata: procedure; /* 参数修改--"加"键处理子程序+ */if p10=0 then /* 如果K7键按下*/do;do while p10=0; /* 等待键松开有效*/call dog; /* 此处必需调用看门狗复位子程序("喂狗"),否则程序将被看门狗复位*/ end;data=data+1; /* 设定值+1 */if data>99 then data=1; /* 规定设定值的上限*/L(1)=data MOD 10; /*将设定值的十位数拆出来送给十位数显示变量L(1) */L(2)=data/10; /*将设定值的个位数拆出来送给个位数显示变量L(2) */call display(L(1),L(2)); /* 将改变后的设定值送164显示出来*/call time(200); /* 延时*/call dog;call time(200);call dog;call wrenable; /* 置存储器写使能*/addrl=00h; /* 置存储器地址*/dat=l(1);call wbyte; /* 将变量L(1)的值写入存储器00h位置*/call wrenable;addrl=01h;dat=l(2);call wbyte; /* 将变量L(2)的值写入存储器01h位置*/end;end incdata;decdata: PROCEDURE; /* 参数修改---"减"键处理子程序- */IF p11=0 THEN /* k8 键处理子程序*/do;do while p11=0;call dog;end;DATA=DATA-1; /* 设定值-1 */if data=0 then data=99;L(1)=data MOD 10;L(2)=data/10;call display(l(1),l(2));call dog;call time(200);call dog;call time(200);call dog;call wrenable;addrl=00h;dat=l(1);call wbyte;call wrenable;addrl=01h;dat=l(2);call wbyte;end;END decdata;starton: PROCEDURE; /* start */declare sd byte;if p12=0 THEN /* K9键处理子程序*/do;do while p12=0;call dog;end;if p17=0 then ok=0; /* 如果p17 口线上有信号输入,则运行标志置0 (停止运行)*/ p13=1; /* 置步进电机正向运转*/call time(200);call dog;do while ok=1; /* 当运行标志为1时,执行速度延时操作*/do sd= 0 to data; /* 根据设定值data的数值延时来确定步进电机运行时的脉冲给定速度*/call dog;end;end;END starton;step: PROCEDURE; /* step */declare sd byte;p13=1; /* 置步进电机正向运转*/call time(200);IF p33=0 THEN /* k11键处理子程序*/do;if p17=0 then ok=0; /* 如果p17上有信号输入,则停止运行*/do while p33=0;do sd= 0 to data; /* 调用延时,调整步进电机的运行速度*/call dog;call time(2);end;call run;call dog;end;end;ok=0;END step;back: PROCEDURE; /* 反向运行处理子程序*/declare sd byte;IF p34=0 THENdo;do while p34=0;call dog;end;if p15=0 then ok=0; /* 反向运行时,如果遇到p15上有信号输入,则停止步进电机运行*/ p13=0; /* 置步进电机反向运行*/call time(200);call dog;do while ok=1;do sd=0 to data; /*根据设定值调节步进电机的运行速度*/call dog;call time(2);end;call run;if (p15=0 or p32=0 ) then ok=0; /* p15 或p32 口线任意一个有信号输入,停止运行*/ end;end;END back;MAIN$PROGRAM: /* 初始化主程序*/ea=0; /* 关中断*/SCON=00h; /*置串口方式0 ,串行数据输出模式*/PCON=00h;tmod=11h;enable; /* 开中断(ea=1) */SCK=0;cs=1; /* 定义存储器口线初始状态*/call wrenable;call wrregister; /* 看门狗存储器初始化*/call wrenable;call dog;p2=0ffh; /* 初始化各个口线的状态*/p1=0ffh;ok=0;p14=1;p32=1;p33=1;p34=1;p13=1;ADDRL=00h; /* 上电复位后从存储器中读出设定的速度值*/CALL rbyte;l(1)=dat;addrl=01h;call rbyte;l(2)=dat;DATA=L(1)+L(2)*10; /*将读出的值合并成十进制,存入变量data中*/ /* 以下是主循环程序*/LOOP:IF p10=0 THEN CALL incdata; /* 检测各个按键是否有按下*/IF p11=0 THEN CALL decdata;if p12=0 thendo;ok=1;call starton;end;if p34=0 thendo;ok=1;call back;end;if p33=0 thendo;ok=1;call step;end;call dog;CALL DISPLAY(L(1),L(2)); /* 将设定值送164显示*/call dog;CALL TIME(100);call dog;GOTO LOOP;END START;。
PLC实现步进电机正反转和调速控制

PLC实现步进电机正反转和调速控制PLC(可编程逻辑控制器)是一种专门用于工业自动化控制系统的计算机控制设备。
它可以实现对多种设备和机器的控制,包括步进电机。
步进电机是一种通过步进角度来控制转动的电机,其转动可以精确地控制在每个步进角度停留一段时间。
步进电机的正反转和调速控制是实现工业自动化过程中常用的功能,PLC可以很好地实现这些控制。
一、步进电机的正反转控制步进电机的正反转控制是通过控制步进电机的相序来实现的。
步进电机有多种相序方式,常见的包括正向旋转、逆向旋转、双向旋转等。
PLC 可以通过控制步进电机的相序开关来实现步进电机的正反转。
在PLC中,可以使用PLC的输出口来控制步进电机的相序开关。
通过将输出口与步进电机的控制线路连接,可以控制相序开关的状态,从而控制步进电机的正反转。
例如,将PLC的一个输出口连接到步进电机的CW (Clockwise)输入线路,另一个输出口连接到步进电机的CCW(Counter Clockwise)输入线路,可以通过控制这两个输出口的状态来实现步进电机的正反转。
二、步进电机的调速控制步进电机的调速控制是通过控制步进电机的脉冲频率来实现的。
步进电机的转速与脉冲频率成正比,脉冲频率越高,步进电机的转速越快。
因此,通过控制PLC输出口给步进电机发送的脉冲频率,可以实现步进电机的调速控制。
在PLC中,可以使用定时器模块来控制步进电机的脉冲频率。
定时器模块可以通过设定计时器的定时时间和周期,来控制输出口的脉冲频率。
通过控制定时器的定时时间,可以控制步进电机每个步进角度的停留时间,从而控制步进电机的转速。
除了定时器模块,PLC还可以使用计数器模块来实现步进电机的调速控制。
计数器模块可以通过设定计数器的初始值和计数步长,来控制输出口的脉冲频率。
通过控制计数器的初始值和计数步长,可以控制步进电机每个步进角度的停留时间,从而实现步进电机的转速控制。
三、步进电机正反转和调速控制实例以下是一个使用PLC实现步进电机正反转和调速控制的实例。
利用置位复位指令编写电动机正反转的程序

利用置位复位指令编写电动机正反转的程序1. 简介在工业自动化领域,电动机的正反转是常见的操作需求。
通过编写程序,利用置位和复位指令可以实现对电动机的正反转控制。
本文将详细介绍如何使用置位和复位指令编写电动机正反转的程序。
2. 置位和复位指令在PLC(可编程逻辑控制器)中,置位和复位指令是常用的逻辑控制指令。
它们分别用于将一个信号置为1(使其有效)或将一个信号复位为0(使其无效)。
在电动机控制中,我们可以利用置位和复位指令实现对电动机正反转的控制。
常见的置位和复位指令有以下几种:•SET:置位指令,将一个信号置为1。
•RESET:复位指令,将一个信号复位为0。
•RST:同RESET,是其缩写形式。
3. 编写电动机正反转程序下面我们将通过一个示例来演示如何使用置位和复位指令编写电动机正反转的程序。
3.1 程序结构首先,我们需要定义一些变量来表示电动机的状态和控制信号。
假设我们使用一个布尔变量MotorRunning来表示电动机是否正在运行,使用两个置位指令MotorForward和MotorReverse来控制电动机的正反转。
程序结构如下:-- 程序开始 ---- 变量定义 --VARMotorRunning: BOOL; -- 电动机运行状态MotorForward: BOOL; -- 电动机正转信号MotorReverse: BOOL; -- 电动机反转信号-- 主程序 --BEGIN-- 正反转控制逻辑 --END.3.2 正反转控制逻辑在主程序中,我们可以使用条件判断语句来实现对电动机的正反转控制。
具体逻辑如下:IF MotorForward THENSET(MotorRunning); -- 置位电动机运行状态RESET(MotorReverse); -- 复位反转信号ELSIF MotorReverse THENSET(MotorRunning); -- 置位电动机运行状态RESET(MotorForward); -- 复位正转信号ELSERESET(MotorRunning); -- 复位电动机运行状态,停止电动机运行END_IF.上述逻辑中,如果MotorForward为真,则置位MotorRunning,同时复位MotorReverse;如果MotorReverse为真,则置位MotorRunning,同时复位MotorForward;如果既没有正转信号也没有反转信号,则复位MotorRunning,停止电动机运行。
单片机驱动直流电机正反转程序

(1)主程序main.c#include<reg51.h>#include"ds1302.h"sbit Xianwei1=P1^0;sbit Xianwei2=P1^1;sbitMotor_A=P1^2;sbitMotor_B=P1^3;sbitMotor_EN=P1^4;unsigned char Num=0;unsigned intdisp[8]={0x3f,0x3f,0x3f,0x3f,0x3f,0x3f,0x3f,0x3f};/*//---存储顺序是秒分时日月周年,存储格式是用BCD码---//uchar TIME[7] = {0, 0, 0x12, 0x01, 0x01, 0x02, 0x13};*/void main(){uchar state=0;Motor_A=1;Motor_B=1;Motor_EN=0;Ds1302Init();while(1){Ds1302ReadTime();if((TIME[2]==0x06)&&(TIME[1])==0) //06:00{state++;if(state>2)state=1;}if(state==1){while(Xianwei1!=0){Motor_A=1; //正转Motor_B=0;Motor_EN=1;}}if(state==2){while(Xianwei2!=0){Motor_A=0; //反转Motor_B=1;Motor_EN=1;}}}}(2)ds1302.h#ifndef __DS1302_H_#define __DS1302_H_//---包含头文件---//#include<reg51.h>#include<intrins.h>//---重定义关键词---//#ifndefuchar#define uchar unsigned char#endif#ifndefuint#define uint unsigned int#endif//---定义ds1302使用的IO口---//sbit DSIO=P3^4;sbit RST=P3^5;sbit SCLK=P3^6;//---定义全局函数---//void Ds1302Write(ucharaddr, uchardat); uchar Ds1302Read(ucharaddr);void Ds1302Init();void Ds1302ReadTime();//---加入全局变量--//extern uchar TIME[7]; //加入全局变量(3)ds1302.c#include"ds1302.h"//---DS1302写入和读取时分秒的地址命令---////---秒分时日月周年最低位读写位;-------//uchar code READ_RTC_ADDR[7] = {0x81, 0x83, 0x85, 0x87, 0x89, 0x8b, 0x8d}; uchar code WRITE_RTC_ADDR[7] = {0x80, 0x82, 0x84, 0x86, 0x88, 0x8a, 0x8c};//---DS1302时钟初始化2013年1月1日星期二12点00分00秒。
plc控制电动机正反转梯形图_PLC实现电机正反转控制编程实例
plc控制电动机正反转梯形图_PLC实现电机正反转控制编
程实例
今天给大家介绍正反转控制吧!喜欢就收藏,点赞,转发吧!谢谢要求:1.能够正反点动电机。
2.能够选择正转,反转电机。
3.能够停止电机。
挺简单的一个正反转,能够带大家入门了解了。
我们首先分析下程序的要求,可以得知,需要输入点5个输出点2个分别如下分配:
输入点:X0 急停 X1正转启动 X2反转启动 X3正转点动 X4反转点动
输出点:Y0输出正转 Y1输出反转
分配好输入输出点后我们就开始我们的梯形图编写,编写完成后如下:
其中的M0和M1 是plc的内部辅助触点。
然后我们点击模拟运行:
然后我们右键­——调试——当前值更改
ON/OFF取反“X3(正转点动)”:
“Y0(正转输入)”能在X3通的时候通,断的时候断开,说明我们的点动效果达到目标。
ON/OFF取反“X4(反转点动)”:
“Y1(反转输出)”能在X4通的时候通,断的时候断开,说明我们的点动效果达到目标
然后我们继续调试“X1正转启动”,“X2反转启动”和”X0停止”。
实现步进电动机正反转的方法

实现步进电动机正反转的方法步进电动机是一种特殊的电动机,它可以按照一定的步长进行旋转,适用于需要精确控制位置和速度的应用。
步进电动机的正反转是指控制其旋转方向的操作,下面将介绍几种实现步进电动机正反转的方法。
1. 使用直流电源反向连接最简单的实现步进电动机反转的方法是通过改变电源的连接方式。
步进电动机通常有两种类型的线圈,分别记作A和B。
在正转时,电源的正极连接到A线圈,负极连接到B线圈;而在反转时,只需要将电源的正负极连接方式反过来即可。
这种方法的优点是简单易行,但需要手动操作电源连接,不适用于需要频繁反转的场景。
2. 使用电路切换正反转为了实现步进电动机的自动正反转,可以使用电路来切换电源连接方式。
这种方法通常使用继电器或开关来控制电源的连接,从而改变步进电动机的旋转方向。
通过控制继电器或开关的通断状态,可以轻松地实现步进电动机的正反转。
这种方法的优点是可以实现自动控制,但需要额外的电路设计和元器件,增加了系统的复杂度。
3. 使用驱动器控制正反转步进电动机通常需要使用驱动器来提供足够的电流和控制信号。
现代的步进电动机驱动器通常具有正反转控制功能,可以通过输入信号来控制步进电动机的旋转方向。
用户只需将控制信号设置为正转或反转,驱动器会自动控制步进电动机的旋转方向。
这种方法的优点是简单方便,无需额外的电路设计,适用于大多数步进电动机应用。
4. 使用编程控制正反转对于需要更精确控制步进电动机的应用,可以使用编程来实现正反转。
通过编写程序,可以根据需要控制步进电动机的旋转方向和步数。
编程控制的优点在于可以实现更复杂的运动模式和控制逻辑,可以满足各种应用的需求。
但这种方法需要具备一定的编程知识和硬件接口,对于初学者可能会有一定的难度。
总结起来,实现步进电动机正反转的方法有多种,可以根据实际需求选择合适的方法。
简单的方法包括改变电源连接方式或使用电路切换正反转;更先进的方法包括使用驱动器控制或编程控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电机正反转程序
一、引言
电机正反转是指电机在工作中可以根据需要改变转动方向的能力。
在实际应用中,电机正反转常常用于控制机械设备的运动方向,如电动车、机械臂等。
本文将介绍电机正反转的基本原理和编写相关程序的方法。
二、电机正反转原理
电机正反转的原理是通过改变电机绕组的电流方向来实现。
当电流方向与磁场方向一致时,电机正转;当电流方向与磁场方向相反时,电机反转。
为了实现电机正反转,需要通过编写程序来控制电机驱动器的工作方式。
三、电机正反转程序编写
1. 硬件准备
需要准备好电机驱动器和控制器。
电机驱动器用于控制电机的转动方向和速度,控制器用于编写程序并与电机驱动器进行通信。
2. 程序设计
编写电机正反转程序的关键是控制电机驱动器的输出信号。
常用的方法是使用PWM信号控制电机的转速,并通过控制电机驱动器的输入信号来实现正反转。
3. 正转程序
电机正转程序的主要步骤如下:
(1)初始化电机驱动器和控制器;
(2)设置PWM信号的占空比,控制电机的转速;
(3)使电机驱动器的输入信号为正转信号;
(4)启动电机。
4. 反转程序
电机反转程序与正转程序类似,只需将电机驱动器的输入信号改为反转信号即可。
5. 程序实现
根据具体的控制器和电机驱动器型号,选择合适的编程语言和开发环境进行程序编写。
常用的语言有C、C++、Python等。
四、注意事项
在编写电机正反转程序时,需要注意以下几点:
1. 确保程序逻辑正确,避免出现死循环或逻辑错误;
2. 对于不同的电机驱动器,可能需要设置不同的控制参数,需要仔细查阅对应的技术文档;
3. 在实际应用中,需要根据具体情况进行调试和优化,确保电机正反转的准确性和稳定性。
五、总结
电机正反转程序的编写是实现电机转向控制的关键。
通过控制电机驱动器的输入信号,可以实现电机的正反转。
在实际应用中,需要根据具体情况进行程序设计和调试,确保电机正反转的准确性和稳定性。
希望本文对读者理解电机正反转的原理和编写相关程序有所帮助。