SEW调试手册
SEW MDX61B_变频器说明书(1)

选择所需语言下图显示选取所需语言时必要的按键。
1.语言选择2.向上箭头,选择上一个菜单项3.OK ,输入确认4.向下箭头,选择下一个菜单项在启动或激活 DBG60B 操作面板的数据传送状态时显示屏上会显示下列内容几秒钟:之后显示屏上会显示语言选择标识。
请按以下步骤选择所需要的语言:•按下按键“Language selection ”。
在显示屏上会出现可供选择的语言列表。
•通过按“向上箭头 / 向下箭头”键选择所需要的语言。
•按“OK ”键确认所选择的语言。
在显示屏上会出现所选语言的基本显示。
06534AXX图53:语言选择按键SEW EURODRIVE54533AXX调试下图显示进行调试所必须的按键。
1.放弃调试或中止2.菜单切换,显示模式 È 编辑模式3.向上箭头,选择上一个菜单项4.OK ,输入确认5.激活上下文菜单6.向下箭头,选择下一个菜单项调试步骤图54:调试按键1.在端子 X13:1(DIØØ“/Controller inhibit ”)处输入“0”信号,例如通过断开电子接线板 X13。
0.00rpm 0.000AmpCONTR. INHIBIT 2.PARAMETER MODE VARIABLE MODE BASIC VIEW3.“STARTUP PARAMET ”菜MANUAL MODESTARTUP PARAMET.COPY TO DBG COPY TO MDX4.••以选择“PARAMETER SET 1” 或“”。
•••STARTUP PARAMET.PREPARE FOR STARTUPC00*STARTUP PARAMETER SET 1PARAMETER SET 25.C01*OPER. MODE 16.选择电机型号。
已连接2极或4极 SEW 电机时,要从选择列表中选择正确的电机。
如要连接其它厂商的电机或者极数多于 4极的 SEW 电机,需要从选择列表“NON-SEW MOTOR ”中C02*MOTOR TYPE 1DT71D2DT71D4DT80K2C02*MOTOR TYPE 1NON-SEW MOT.DT63K4/DR63S47.根据电机的铭牌为所选连接类型输入电机额定电压。
sew变频器筑路调试说明
启动与运行测试
启动测试
在低速下启动变频器,观察电机运行是否正常,无异常响声或振动。
运行测试
在额定速度下运行变频器,检查电机运行是否稳定,各项参数是否正常。
03
调试中的问题及处理
BIG DATA EMPOWERS TO CREATE A NEW
ERA
电源故障及处理
总结词
电源故障是变频器调试中最常见的问题之一,可能导致变频器无法正常启动或运行。
电机连接与检查
电机电缆连接
确保电机电缆正确连接到变频器上, 无松动或接触不良现象。
电机机械检查
检查电机是否正常,无卡滞或异常响 声,电机接地良好。
参数设置与调整
基本参数设置
根据电机铭牌信息,设置电机的基本 参数,如电压、电流、频率等。
运行参数调整
根据实际需求,调整运行参数,如速 度控制、转矩控制等。
详细描述
控制回路故障通常表现为变频器无法启动、运行异常或报错代码等。处理控制回路故障时,应首先检 查控制信号是否正常,包括输入信号、输出信号等。如果控制信号正常,则可能是变频器内部控制回 路出现故障,需要进一步检查和维修。
电机故障及处理
总结词
电机故障可能导致变频器无法正常驱动 电机或电机性能下降。
在调试过程中,应避免使用未经授权的工具和设 备,以免造成意外伤害。
定期进行设备检查与维护
定期检查SEW变频器的运行状 态,包括电源、输入输出信号、 冷却系统等,确保设备正常运行。
定期清理设备表面灰尘和杂物, 保持设备清洁,以延长设备使用
寿命。
定期对设备进行全面检查和维护, 包括更换磨损部件、调整参数等,
详细描述
电源故障通常表现为电源指示灯不亮、变频器显示屏无显示等。处理电源故障时,应首先检查电源是否正常,包 括电源电压、电源线是否松动或断路等。如果电源正常,则可能是变频器内部电源电路出现故障,需要进一步检 查和维修。
SEW电机中文操作手册(精品)

操作手册–交流电机 DR/DV/DT/DTE/DVE ,异步伺服电机 CT/CV32安全提示..............................................................................................................53电机构造..............................................................................................................63.1交流电机的构造原理..................................................................................63.2铭牌,额定数据.........................................................................................74机械安装..............................................................................................................94.1开始安装之前............................................................................................94.2准备工作....................................................................................................94.3安装电机..................................................................................................104.4安装公差..................................................................................................115电器安装............................................................................................................125.1接线提示..................................................................................................125.2使用变频器运行时的特别注意事项..........................................................125.3有关单相电机的特别注意事项.................................................................125.4改善接地(EMV )...................................................................................135.5力矩电机和低速电机的特别注意事项......................................................135.6开关操作的特别注意事项........................................................................145.7运行过程中的环境条件............................................................................145.8电机连接..................................................................................................155.956 和 63 电机连线的准备工作.................................................................165.10DT56~ +/BMG 电机连接.........................................................................165.11ET56 单相电机设计.................................................................................175.12通过 IS 插头连接电机..............................................................................175.13通过 AB.., AD.., AM.., AS 插头连接电机.................................................215.14通过 ASK1 插头连接电机........................................................................215.15制动器连接..............................................................................................235.16辅助装备..................................................................................................246调试...................................................................................................................286.1调试的条件..............................................................................................286.2改变配有逆止器的电机的锁死方向..........................................................297运转故障............................................................................................................317.1电机上的故障..........................................................................................317.2制动器上的故障.......................................................................................327.3配变频器运转时的故障............................................................................328检查/维护.........................................................................................................338.1检查与维护周期.......................................................................................338.2电机和制动器维护的准备工作.................................................................348.3电机的检查/维护作业.............................................................................378.4制动器 BMG02 的检查/维护作业...........................................................398.5制动器 BR03 的检查/维护作业..............................................................408.6制动器 BMG05~8, BM15~62 的检查/维护作业......................................448.7制动器 BMG61/122 的检查/维护作业....................................................499技术参数............................................................................................................529.1BMG02制动器的制动力矩及需要维护前的做功......................................529.2BMG02 备件订货说明.............................................................................529.3BMG05~8, BR03, BC, Bd 制动器的做功、工作气隙及制动力矩.............539.4BM15~62 制动器的做功、工作气隙及制动力矩......................................549.5运行电流..................................................................................................559.6允许的球轴承型号...................................................................................599.7SEW 电机球轴承的润滑剂表...................................................................5910附录...................................................................................................................6010.1变更索引..................................................................................................6010.2关键词目录. (61)4操作手册 – 交流电机 DR/DV/DT/DTE/DVE ,异步伺服电机 CT/CV1重要提示安全提示和警告提示请务必注意本操作手册中的安全提示和警告提示!在保修期间,未按本操作说明操作而引起的故障,由使用者承担。
SEW变频器调试简单参考

2.X13端子上,1、2、4、8端子短接,7与9短接,如果不短 接,变频器显示控制器禁止。短接完成后显示无使能。如图 :
2:X13端子上,1、2、4、8端子短接,7与9短接(必须),如果不短接, 变频器显示控制器禁止。短接完成后显示无使能。
3.X10端子上D9与D10外接24V电源(D9接+24V,D10接 0V),用于提供变频器电子信号电源,即只有此+24V接入 ,变频器即可调试参数。3(+)与2(-)是有源(24V)常开触 点,用来接控制电机抱闸。
手动,
谢谢
单击Commissioning 进行设原点方式等设置(出现了手动控制页才能设置 )
• 速度设定值的配置(很重要,此图针对旋转机构),按如
图方式选择即可
脉冲数 /移动 位置值
设置软限位和参考点方式(选择8):8是将伺服当前位置是为原点
最大速 度是根 据上图 自动计 算得来
下载参数完成
现在就可以控制设备,控制时注意事项: • 1.在没有插上X13端子排时才能单击Control,获得控制权
SEW变频器调试简单参考
一.调试前注意事项
• 1.变频器出厂时,X17端子上4供+24V,3供0V。如果没有 短接,请将以上短接或者把4、3端子当急停信号使用,用 以控制变频器是否停止。注:短接时变频器处于可启动状 态,断开时处于安全停止状态。
• 如下图:SVI是端子4(+24V) 、S0V是端子3(0V)。
下图是抱闸控制接触器kmb10线号在接抱闸时要注意并不是通过接触器直接接到抱闸而是使用如下图sew的器件二手动调试sew按如下步骤进行操作1设置连接方式点击鼠标所示位置2参数配置单击此图标进行参数配置单击此图标进行参数配置单击鼠标所示位置出现下图参数读取进度条单击startupset1默认即可下一步默认即可下一步使用编码器接下来几步默认下一步出现这个界面时单击接受参考参数并且下一步此处注意
SEW制动器间隙调整说明手册
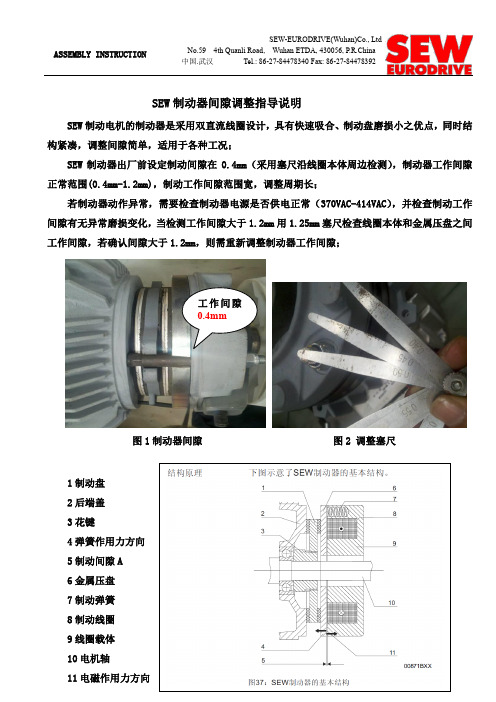
SEW 制动器间隙调整指导说明
SEW 制动电机的制动器是采用双直流线圈设计,具有快速吸合、制动盘磨损小之优点,同时结构紧凑,调整间隙简单,适用于各种工况;
SEW 制动器出厂前设定制动间隙在0.4mm (采用塞尺沿线圈本体周边检测),制动器工作间隙正常范围(0.4mm-1.2mm),制动工作间隙范围宽,调整周期长;
若制动器动作异常,需要检查制动器电源是否供电正常(370VAC-414VAC ),并检查制动工作间隙有无异常磨损变化,当检测工作间隙大于1.2mm 用1.25mm 塞尺检查线圈本体和金属压盘之间工作间隙,若确认间隙大于1.2mm ,则需重新调整制动器工作间隙;
图1制动器间隙 图2 调整塞尺
1制动盘
2后端盖
3花键
4弹簧作用力方向
5制动间隙A
6金属压盘
7制动弹簧
8制动线圈
9线圈载体
10电机轴
11电磁作用力方向 工作间隙
0.4mm
图3 图4 调整间隙及手动释放方法:
1、采用19开口扳手顺时针旋转定位隔套b 约2圈,将三个定位隔套b 旋入后端盖约1.6mm ,采用22开口扳手顺时针旋转固定螺帽a ,依次均匀拧紧三个螺母a ,用0.4mm 塞尺插入线圈和金属压盘间,沿线圈圆周均匀检测,直至0.45mm 塞尺不进即可;
2、间隙检测完成,再依次反时针旋出三个定位隔套b ,拧出隔套b ,将螺帽a 和隔套b 锁紧线圈本体,线圈固定完成;
3、单个制动盘出厂标准厚度是14mm ,当其磨损后厚度低于10mm 后就需要更换;
4、在制动器没有通电情况下,可手动释放制动器(即顺时针旋转释放顶丝c ,将金属压盘带向线圈本体方向,让两者间工作间隙调整为零间隙,制动器手动释放,此时可灵活转动电机轴,满足检查、调试要求。
sew调试步骤自己总结

s e w调试步骤自己总结 Document serial number【NL89WT-NY98YT-NC8CB-NNUUT-NUT108】1.变频器调试步骤:(所用软件为M O V I T O O L S)设置网关DP地址,然后短接所有变频器的DI01与24VIO端子,然后变频器与PC通信,点扫描,扫描出设备后下载变频器启动信息,即parameter1(设置控制方式为VF,根据实际情况设置电机型号),然后修改参数,如P100设为SBUS/Fixed,P101设为SBUS,P600等设为NO FUNCTION,P881设为1,其他变频器也是这样,只是修改一下P881(系统总线的地址)的数值。
然后网关与PC 通信,扫描出与网关通信的所有变频器,然后知道变频器与PLC通信的所用的外设地址,最后把最后一个变频器的S1和S2接通,其余变频器的S1与S2断开,最后在通电状态下把AS 接通(切记是在所有变频器的S1与S2设置正确的前提下)。
伺服调试步骤:(所用软件为MT_Manger)设置伺服DP地址,然后断开DIOO与24VIO,接通DI01与24VIO,同时接通7与9端子,然后软件与伺服通信,通信波特率为,型号为MOVITRAC B,点对点通信方式,下载伺服启动信息,设置转动惯量为100,电机温度过高时立即停止然后把启动信息下载到伺服(必须在禁止模式下)。
然后点通过扩展总线控制,选择通信方式为DP,然后电子齿轮比用默认值,不能点击Caculate,即电子齿轮比全部采用默认值,直接点击NEXT,然后设置软限位,然后下载到伺服(必须在禁止模式下)。
然后进入监控模式,伺服启动必须先设置手动启动,此时状态字Motor turning为1,此时若IPOS reference位为0,必须进行寻参模式,才能启动自动模式,寻参模式启动方法如下:寻参:1.设置P902的参数,确定寻参类型为0,然后在控制模式下通过PC发控制字以及0转速给伺服,即启动寻参,寻参原位信号通过端子DI03(端子功能为Reference Travel)传入,为1时减速,脱离时停止,同时将当前位置清零,此时IPOS reference位为1。
SEW-MDX61B-DBG60B操作面板调试步骤
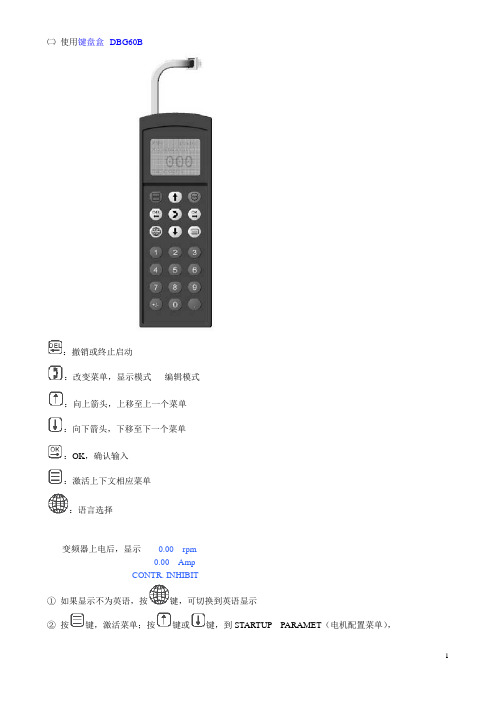
㈡使用键盘盒--DBG60B:撤销或终止启动:改变菜单,显示模式--- 编辑模式:向上箭头,上移至上一个菜单:向下箭头,下移至下一个菜单:OK,确认输入:激活上下文相应菜单:语言选择变频器上电后,显示0.00 rpm0.00 AmpCONTR. INHIBIT①如果显示不为英语,按键,可切换到英语显示②按键,激活菜单;按键或键,到STARTUP PARAMET(电机配置菜单),1③按键,显示C00 * STARTUPPARAMETER SET 1 (请选择参数组1)④按键,显示C22 * MOTORSSINGLE MOTOR (请选择单电机驱动)⑤按键,显示C26 * OPER. MODEVFC (请选择矢量控制模式)⑥按键,显示C29 * ENCODERNO⑦按键,显示C36 * OPER. MODESPEED CONTROL (请选择速度控制模式)⑧按键,显示C02 * MOTOR TYPE1DV132S4 (请根据电机铭牌选择相应型号)⑨按键,显示C03 * MOT.RATED.VOLT.1 V400.00 (电机额定电压)⑩按键,显示C04 * MOT.RATED.FREQ.1 Hz50.00 (电机额定频率)⑾按键,显示C05 * MAINS.RAT.VOLT V400.00 (变频器入线电压)⑿按键,显示835 * RESP.TF—SIG VNO RESPONSE(热敏电阻监控无效)⒀按键,显示C06 * CALCULATIONYES(对上述设定参数进行矢量建模运算)⒁显示C08 * SAVEYES(保存建模运算后的值)⒂按键,显示STARTUP PARAMET(电机配置菜单)⒃按键或键,到BASIC VIEW(初始化界面),按键,显示0.00 rpm0.00 AmpCONTR. INHIBIT电机配置完成。
要设定所需的运行参数,按键或键,即可进入相应的参数号进行设定。
2。
SEW MDX61B_变频器说明书(1)
选择所需语言下图显示选取所需语言时必要的按键。
1.语言选择2.向上箭头,选择上一个菜单项3.OK ,输入确认4.向下箭头,选择下一个菜单项在启动或激活 DBG60B 操作面板的数据传送状态时显示屏上会显示下列内容几秒钟:之后显示屏上会显示语言选择标识。
请按以下步骤选择所需要的语言:•按下按键“Language selection ”。
在显示屏上会出现可供选择的语言列表。
•通过按“向上箭头 / 向下箭头”键选择所需要的语言。
•按“OK ”键确认所选择的语言。
在显示屏上会出现所选语言的基本显示。
06534AXX图53:语言选择按键SEW EURODRIVE54533AXX调试下图显示进行调试所必须的按键。
1.放弃调试或中止2.菜单切换,显示模式 È 编辑模式3.向上箭头,选择上一个菜单项4.OK ,输入确认5.激活上下文菜单6.向下箭头,选择下一个菜单项调试步骤图54:调试按键1.在端子 X13:1(DIØØ“/Controller inhibit ”)处输入“0”信号,例如通过断开电子接线板 X13。
0.00rpm 0.000AmpCONTR. INHIBIT 2.PARAMETER MODE VARIABLE MODE BASIC VIEW3.“STARTUP PARAMET ”菜MANUAL MODESTARTUP PARAMET.COPY TO DBG COPY TO MDX4.••以选择“PARAMETER SET 1” 或“”。
•••STARTUP PARAMET.PREPARE FOR STARTUPC00*STARTUP PARAMETER SET 1PARAMETER SET 25.C01*OPER. MODE 16.选择电机型号。
已连接2极或4极 SEW 电机时,要从选择列表中选择正确的电机。
如要连接其它厂商的电机或者极数多于 4极的 SEW 电机,需要从选择列表“NON-SEW MOTOR ”中C02*MOTOR TYPE 1DT71D2DT71D4DT80K2C02*MOTOR TYPE 1NON-SEW MOT.DT63K4/DR63S47.根据电机的铭牌为所选连接类型输入电机额定电压。
[整理]SEW变频器调试步骤.
![[整理]SEW变频器调试步骤.](https://img.taocdn.com/s3/m/0d74278cfd0a79563c1e72ea.png)
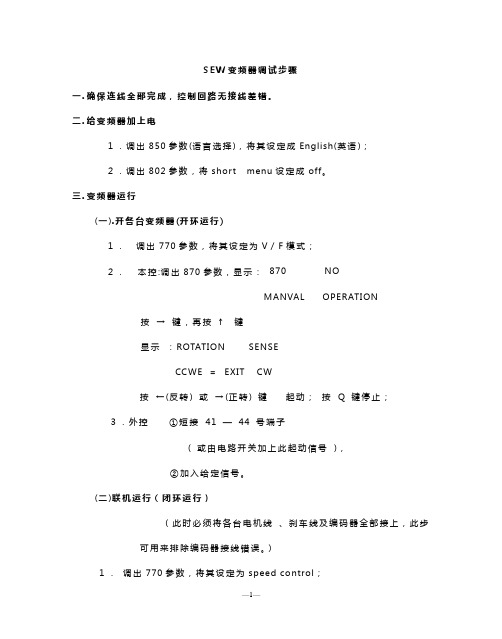
SEW变频器调试步骤一.确保连线全部完成,控制回路无接线差错。
二.给变频器加上电1.调出850参数(语言选择),将其设定成English(英语);2.调出802参数,将short menu设定成off。
三.变频器运行(一).开各台变频器(开环运行)1.调出770参数,将其设定为V/F模式;2.本控:调出870参数,显示:870 NOMANVAL OPERATION按→键,再按↑键显示:ROTATION SENSECCWE =EXIT CW按←(反转) 或→(正转) 键起动;按Q 键停止;3.外控①短接41 —44 号端子( 或由电路开关加上此起动信号),②加入给定信号。
(二)联机运行(闭环运行)(此时必须将各台电机线、刹车线及编码器全部接上,此步可用来排除编码器接线错误。
)1.调出770参数,将其设定为speed control;2.调出510参数,设为yes;3.调出520参数,设为yes;4.开各台变频器(以上述开环运行方式开各台变频器)如报出10号故障,可能是相序错,调整相序开机;如报出12号故障,也可能是相序错,调整相序开机。
四.联动开机(开不出可能与各类参数设定有关)(一)短接从机102-44号端口(即自由运行状态)(二)开主机启动(三)主机开出后,辅机逐个脱去102-44号短接线注: 1 灌装机不允许反转2洗瓶机整体反转操作(指穿上大链后):①将主机41号端口线拆下,接入42号端口,正常开机则可;②各台辅机正、反转微调:A短接102、44号端口(即自由运行状态)B以变频器旁按钮盒操作,即将旋钮打在正或反转状态C按下点动按钮,将链条松紧调至合适位置(与机械配合).附主要参数(其他参数按图纸设定)灌装机(以GY80为例)灌装机参数设定主动机从动机注:编码器部分94(+5V)97(0V)编码器电源95(+5V)96(0V)传感器电源对于编码器有10个端口的94、95、96、97必须分开8 个端口的:94、95 96、97故障信号和故障原因清单:。
SEW-MDX61B-DBG60B操作面板调试步骤
SEW-MDX61B-DBG60B操作⾯板调试步骤㈡使⽤键盘盒--DBG60B:撤销或终⽌启动:改变菜单,显⽰模式--- 编辑模式:向上箭头,上移⾄上⼀个菜单:向下箭头,下移⾄下⼀个菜单:OK,确认输⼊:激活上下⽂相应菜单:语⾔选择变频器上电后,显⽰0.00 rpm0.00 AmpCONTR. INHIBIT①如果显⽰不为英语,按键,可切换到英语显⽰②按键,激活菜单;按键或键,到STARTUP PARAMET(电机配置菜单),1③按键,显⽰C00 * STARTUPPARAMETER SET 1 (请选择参数组1)④按键,显⽰C22 * MOTORSSINGLE MOTOR (请选择单电机驱动)⑤按键,显⽰C26 * OPER. MODEVFC (请选择⽮量控制模式)⑥按键,显⽰C29 * ENCODERNO⑦按键,显⽰C36 * OPER. MODESPEED CONTROL (请选择速度控制模式)⑧按键,显⽰C02 * MOTOR TYPE1DV132S4 (请根据电机铭牌选择相应型号)⑨按键,显⽰C03 * MOT.RATED.VOLT.1 V400.00 (电机额定电压)⑩按键,显⽰C04 * MOT.RATED.FREQ.1 Hz50.00 (电机额定频率)⑾按键,显⽰C05 * MAINS.RAT.VOLT V400.00 (变频器⼊线电压)⑿按键,显⽰835 * RESP.TF—SIG VNO RESPONSE(热敏电阻监控⽆效)⒀按键,显⽰C06 * CALCULATIONYES(对上述设定参数进⾏⽮量建模运算)⒁显⽰C08 * SAVEYES(保存建模运算后的值)⒂按键,显⽰STARTUP PARAMET(电机配置菜单)⒃按键或键,到BASIC VIEW(初始化界⾯),按键,显⽰0.00 rpm0.00 AmpCONTR. INHIBIT电机配置完成。
要设定所需的运⾏参数,按键或键,即可进⼊相应的参数号进⾏设定。
SEW变频器调试简单参考

SEW变频器调试简单参考
一.调试前注意事项
1.变频器出厂时,X17端子上4供+24V,3供0V。如果没有短接,请 将以上短接或者把4、3端子当急停信号使用,用以控制变频器是否停 止。注:短接时变频器处于可启动状态,断开时处于安全停止状态。
如下图:SVI是端子4(+24V) 、S0V是端子3(0V)。
即可
脉冲数 /移动 位置值
LOGO
设置软限位和参考点方式(选择8):8是将伺服当前位置是为原点
最大速 度是根 据上图 自动计 算得来
LOGO
LOGO
LOGO
下载参数完成
LOGO
LOGO
LOGO
现在就可以控制设备,控制时注意事项:
1.在没有插上X13端子排时才能单击Control,获得控制权限,先插上 的话是无法获得控制权限。取消控制权限时也一样,先拔出X13端子 配才能取消。
LOGO
下图是抱闸控制接触器(10线号)
LOGO
在接抱闸时,要注意并不是通过接触器直接接到抱闸,而是 使用如下图Sew的器件
LOGO
LOGO
二、手动调试Sew
1. 打开MotionStudio软件(Sew调试软件) 按如下步骤进行操作
LOGO
1、设置连接方式
LOGO
点击鼠标所示位置
01手动,
LOGO
LOGO
LOGO
LOGO
2.X13端子上,1、2、4、8端子短接,7与9短接,如果不 短接,变频器显示控制器禁止。短接完成后显示无使能。如 图:
2:X13端子上,1、2、4、8端子短接,7与9短接(必须),如果不短接, 变频器显示控制器禁止。短接完成后显示无使能。
sew变频器说明书

SEW变频器说明书目录1.产品概述2.安装与调试3.操作说明4.故障排除5.技术规格6.常见问题解答7.附录1. 产品概述SEW变频器是一种用于调节电动机运行速度的设备。
它基于变频技术,通过调整电源频率来改变电动机的转速。
SEW变频器具有高精度的控制和广泛的应用领域,可用于工业生产线、船舶、机械设备等场合。
本文档将介绍SEW变频器的安装与调试、操作说明、故障排除、技术规格以及常见问题解答等内容,帮助用户正确使用和维护SEW变频器。
2. 安装与调试在安装SEW变频器之前,请务必断开电源,并按照以下步骤进行安装和调试:1.确定安装位置:选择一个干燥、通风良好的位置安装SEW变频器,注意避免高温、潮湿和有腐蚀性的环境。
2.连接电源:根据提供的接线图,将电源线正确接入变频器。
3.连接电动机:将电动机的电源线接入变频器的输出端子,并确保接线牢固。
4.接入控制信号:根据需求,接入控制信号线,如启停信号、转速信号等。
5.接通电源:根据接线图接通电源,注意检查各个接线是否正确连接。
6.调试参数:根据实际情况,调整变频器的参数配置,如运行频率、过载保护等。
7.运行测试:启动变频器进行运行测试,检查电动机的运行状态和输出效果。
3. 操作说明SEW变频器的操作简单方便,以下是常见的操作步骤:1.启动和停止:按下启动按钮启动变频器,按下停止按钮停止变频器。
2.转速调节:通过旋转转速调节旋钮来调节电动机的转速,注意在变速过程中的平稳性。
3.运行状态监测:变频器具有运行状态监测功能,可以监测电动机的电流、转速等参数。
4.报警信息处理:当变频器出现故障或异常情况时,会发出报警信息,需要及时处理和排除故障。
5.其他功能:SEW变频器还具有多种功能,如定时启停、连续循环、多段速度调节等,用户可以根据需要进行设置和使用。
4. 故障排除在使用SEW变频器过程中,可能会遇到一些故障和问题,以下是常见的故障排除方法:1.电源故障:检查变频器的电源线是否接触良好,确保电源稳定。
sew变频器筑路调试说明
10/1998
说明:此步骤主要检测编码器的好坏、编码器的接线 是否正确和主回路电机电缆是否反相。
设定参数 P700=VFC-n-Control&IPOS 控制方式
3.电动机闭环空载表格位控运行。
(1)电机滚筒和钢丝绳脱离;
(2)点击
,选择Startup下拉菜单
(3)按照Table Positioning软件介绍设定参数。 在表格中设定四组位置值、位控转数及相应 的位控斜率。
LY 2_E
10/1998
设定卷扬辊径; 设定减速机速比; 设定外部减速速比。
软件限位开关:0--表示无软件限位。 硬件限位开关:有/无 参考偏置:优化绝对值编码器时,
自动设置。 设定实际位置源:X14/X15/DIP 设定参考类型:绝对值编码器
无须运行
LY 2_E
10/1998
点动模式:
快速点动速度 慢速点动速度 点动斜率
10/1998
详细说明
点击
图标,进入
变频器初始化。
LY 2_E
10/1998
选择绝对值编码器接口板
LY 2_E
10/1998
设定开关频率:
设定DIP11A接口板扫描 频率---读取位置信息 100%扫描频率为额定频率 对应编码器电缆长100m。 如果电缆减少长度,扫描 频率可适当增加。
LY 2_E
LY 2_E
10/1998
感谢下 载
输出为“1”。
参考运行模式监控
LY 2_E
10/1998
参考运行模式选择: DI10(Mode Low)=0 DI11(Mode High)=1
DI12(Start ref):按照软件定义的参 行模式,开始运行。 DO02(IPOS referenced):运行到参考 后,输出为“1”。
SEW-零点设置方法

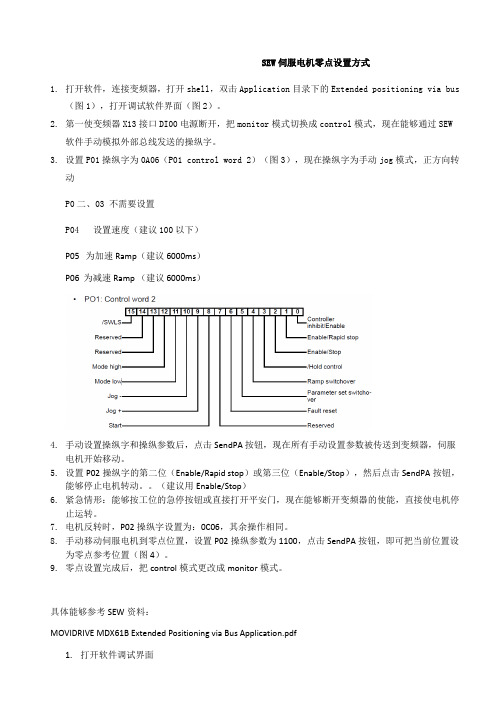
SEW伺服电机零点设置方法1.打开软件,连接变频器,打开shell,双击Application目录下的Extendedpositioning via bus (图1),打开调试软件界面(图2)。
2.首先使变频器X13接口DI00电源断开,把monitor模式切换成control模式,此时可以通过SEW软件手动模拟外部总线发送的控制字。
3.设置P01控制字为0A06(P01 control word 2)(图3),此时控制字为手动jog模式,正方向转动P02、03 不需要设置P04 设置速度(建议100以下)P05 为加速 Ramp(建议6000ms)P06 为减速Ramp (建议 6000ms)4.手动设置控制字和控制参数后,点击SendPA 按钮,此时所有手动设置参数被传送到变频器,伺服电机开始移动。
5.设置P02控制字的第二位(Enable/Rapid stop)或者第三位(Enable/Stop),然后点击SendPA按钮,可以停止电机转动。
(建议用Enable/Stop)6.紧急情况:可以按工位的急停按钮或者直接打开安全门,此时可以断开变频器的使能,直接使电机停止运转。
7.电机反转时,P02控制字设置为:0C06,其余操作相同。
8.手动移动伺服电机到零点位置,设置P02控制参数为1100,点击SendPA按钮,即可把当前位置设为零点参考位置(图4)。
9.零点设置完成后,把control模式更改为monitor模式。
具体可以参考SEW资料:MOVIDRIVE MDX61B Extended Positioning via Bus Application.pdf1.打开软件调试界面图12.更改操作模式从monitor到control。
图23.jog 设置,手动运动图34.地板伺服到达零点位置后,设置当前位置为零点方法图45.设置完成后,把control 改为monitor control模式69547。
SEW零点设置方式
SEW伺服电机零点设置方式1.打开软件,连接变频器,打开shell,双击Application目录下的Extended positioning via bus(图1),打开调试软件界面(图2)。
2.第一使变频器X13接口DI00电源断开,把monitor模式切换成control模式,现在能够通过SEW软件手动模拟外部总线发送的操纵字。
3.设置P01操纵字为0A06(P01 control word 2)(图3),现在操纵字为手动jog模式,正方向转动P0二、03 不需要设置P04 设置速度(建议100以下)P05 为加速 Ramp(建议6000ms)P06 为减速Ramp (建议 6000ms)4.手动设置操纵字和操纵参数后,点击SendPA 按钮,现在所有手动设置参数被传送到变频器,伺服电机开始移动。
5.设置P02操纵字的第二位(Enable/Rapid stop)或第三位(Enable/Stop),然后点击SendPA按钮,能够停止电机转动。
(建议用Enable/Stop)6.紧急情形:能够按工位的急停按钮或直接打开平安门,现在能够断开变频器的使能,直接使电机停止运转。
7.电机反转时,P02操纵字设置为:0C06,其余操作相同。
8.手动移动伺服电机到零点位置,设置P02操纵参数为1100,点击SendPA按钮,即可把当前位置设为零点参考位置(图4)。
9.零点设置完成后,把control模式更改成monitor模式。
具体能够参考SEW资料:MOVIDRIVE MDX61B Extended Positioning via Bus Application.pdf1.打开软件调试界面图11.更改操作模式从monitor到control。
图2 2.jog 设置,手动运动图33.地板伺服抵达零点位置后,设置当前位置为零点方式图44.设置完成后,把control 改成monitor control模式69547。
SEW变频器调试步骤
SEW变频器调试步骤一.确保连线全部完成,控制回路无接线差错。
二.给变频器加上电1.调出850参数(语言选择),将其设定成English(英语);2.调出802参数,将short menu设定成off。
三.变频器运行(一).开各台变频器(开环运行)1.调出770参数,将其设定为V/F模式;2.本控:调出870参数,显示:870 NOMANVAL OPERATION按→键,再按↑键显示:ROTATION SENSECCWE =EXIT CW按←(反转) 或→(正转) 键起动;按Q 键停止;3.外控①短接41 —44 号端子( 或由电路开关加上此起动信号),②加入给定信号。
(二)联机运行(闭环运行)(此时必须将各台电机线、刹车线及编码器全部接上,此步可用来排除编码器接线错误。
)1.调出770参数,将其设定为speed control;2.调出510参数,设为yes;3.调出520参数,设为yes;4.开各台变频器(以上述开环运行方式开各台变频器)如报出10号故障,可能是相序错,调整相序开机;如报出12号故障,也可能是相序错,调整相序开机。
四.联动开机(开不出可能与各类参数设定有关)(一)短接从机102-44号端口(即自由运行状态)(二)开主机启动(三)主机开出后,辅机逐个脱去102-44号短接线注: 1 灌装机不允许反转2洗瓶机整体反转操作(指穿上大链后):①将主机41号端口线拆下,接入42号端口,正常开机则可;②各台辅机正、反转微调:A短接102、44号端口(即自由运行状态)B以变频器旁按钮盒操作,即将旋钮打在正或反转状态C按下点动按钮,将链条松紧调至合适位置(与机械配合).附主要参数(其他参数按图纸设定)灌装机(以GY80为例)灌装机参数设定主动机从动机注:编码器部分94(+5V)97(0V)编码器电源95(+5V)96(0V)传感器电源对于编码器有10个端口的94、95、96、97必须分开8 个端口的:94、95 96、97故障信号和故障原因清单:。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
—
计算:切记-在输入以上数据 后必须点击Calculation
注意: -如Calculation of the scaling标题框中 相关数据不进行填写,并且不点击 Calculation按钮,则设备运行距离是以 脉冲为单位。 计算脉冲/距离的比例因子: -选择滚筒直径”Drive Wheel Diameter”,写入实际值单位为毫米[mm]或1/10毫米[1/10mm] -写入减速电机和外部减速设备的减速比 -点击<Calculate> 计算比例因子.脉冲/距离将会计算,单位为inc/mm
Version:TASC_2008_11
Driving the world
Extended Positioning via Bus
3
硬件描述及接线
硬件要求及接线
• 变频器 -该应用模块须选用MOVIDRIVE B应用型变 频器(…-0T) MOVIDRIVE MDX60B不能使用该功能 -须依据总线类型选择相应的总线卡,过程数 据为4个字或6个字; • 电机 -对于MDX61B附件DEH11B: CT/CV异步伺服电机或DR/DT/DV异步电机 可选则Hiperface,sin/cos或TTL编码器 -对于MDX61B附件DER11B: CM/DS同步伺服电机旋转编码器为标配 • 编码器 -电机轴和负载紧密连接,无打滑; 无须外部编码器 -电机轴和负载不紧密连接,有打滑现象; 须安装外部编码器 [1]当使用外部增量型编码器时,编码器信 号需要连接到X14接口。 [2]当使用外部绝对值编码器时,编码器信 号需要连接到DIP卡的X62接口。
Extended Positioning via Bus
MOVIDRIVE® B Inverters
Extended Positioning via Bus 扩展总线定位功能
LY 2_E
Version:TASC_2008_11
10/1998
Driving the world
Extended Positioning via Bus
注意:最大运行距离依据运行距离单位(Travel Unit)而定。
距离单位 1/10mm mm 最大运行距离 26.2m 262m
• 通过总线可以根据需要随时改变运行速度和斜率;
• 具有软件限位功能; • 循环扫描实际转速、实际位置、有功电流和控制器的利用率; • 通过PI:3目标位到达“Target position reached”确认位置控制结束; • 实际位置源(电机侧编码器,外部编码器或绝对值编码器)可以选择; • 和上位机PLC连接简便; • 4个过程数据可替代6个过程数据运行,在这种情况下Ramp function没有具体规定。 • 三种运行模式:点动模式,参考模式和自动模式;
PO3
PO4 PO5 PO6
Target position low
Speed setpoint Accelerating ramp Deceleration ramp
目标位置
设定速度 加速时间 减速时间
PI3
PI4 PI5 PI6
Actual position low
Speed actual value Actual current Unit utilization
Extended Positioning via Bus
17
举例1:电机侧的增量型编码器或绝对值型编码器做为实际的位置源 - 在“Diameter of driving wheel”中选择相应的单位,毫米[mm]或1/10毫米[mm] - 在”Gearing ratio”窗口中,输入减速机的速比 在“External ratio”窗口中,输入外部减速设备的速比 - 在转速单位”Unit for speed”窗口中,选择[mm/s],[m/min],[1/min] - 对于绝对值编码器位置控制,在“Place of absolute encoder”窗口中,选择”Motor shaft” - 点击计算<Calculation>按钮。距离“distance”和转速”speed”比例因子由程序自动计算
Version:TASC_2008_11
Driving the world
Extended Positioning via Bus
4
限位开关
-限位开关的覆盖范围必须含盖运行区域。 -限位开关需使用常闭触点,即低电平有效。
Version:TASC_2008_11
Driving the world
实际位置
实际转速 实际电流 利用率
Driving the world
Version:TASC_2008_11
Extended Positioning via Bus
7
PO过程输出字
0.0
1.0
Version:TASC_2008_11
Driving the world
Extended Positioning via Bus
Extended Positioning via Bus
5
准备工作
硬件
-计算机一台 [1]装有Windows 95、Windows 98、WindowsNT4.0、Windows2000 或者Windows XP操作系统; [2]安装MOVITOOLS 4.20或4.20以上的版本。 -根据实际情况,选择适配器接口一套 UWS21B---PC的串口与变频器相连接; USB 11A---PC的USB口与变频器相连接;
Version:TASC_2008_11
Driving the world
Extended Positioning via Bus
15
设定距离和转速的比例因子参数
根据编码器源选择实际位置源: 电机编码器—MOTOR.ENC.(X15); 外部编码器 EXTERN.ENC.(X14); 绝对值编码器--ABSOL.ENC.(DIP); 设定驱动轮盘直径或者螺旋升角; 设定减速机速比; 设定外部减速速比; 其单位包括:毫米、1/10毫米;
10
PO过程输出字
Version:TASC_2008_11
Driving the world
Extended Positioning via Bus
11
过程输入数据的定义:
如果故障位(bit 5)为高电平,状态字的高字节显示故障码 如果故障位(bit 5)为低电平,状态字的高字节显示变频器的状态
初始化及组态
在进行操作之前需要完成下列工作 -变频器初始化; -变频器组态; -如使用绝对值编码器,则需要对绝对值编码器卡DIP初始化;
Version:TASC_2008_11
Driving the world
Extended Positioning via Bus
6
总线通讯
总线过程数据
双击打开Extended Positioning via Bus应用模块
Version:TASC_2008_11
Driving the world
Extended Positioning via Bus
14
设置总线参数
选择总线通讯类型 总线地址 总线通讯溢出时间 通讯溢出的响应 总线通讯波特率
Version:TASC_2008_11
Driving the world
Extended Positioning via Bus
12
PI过程输入字
Version:TASC_2008_11
Driving the world
Extended Positioning via Bus
13
扩展总线位置功能”Extended Positioning via bus”程序初始化
8
PO1-控制字2的低字节
Version:TASC_2008_11
Driving the world
Extended Positioning via Bus
9
PO1-控制字2的高字节
Version:TASC_2008_11
Driving the world
Extended Positioning via Bus
PLC向变频器发送6个过程输出字(PO1…PO6) PLC接收由变频器返回6个过程输入字(PI1…PI6) PO1 PO2 Control word2 Target position high 控制字2 目标位置 PI1 PI2 Status word Actual position high 状态字 实际位置
设置总线参数: -系统总线(SBus)已ห้องสมุดไป่ตู้集成在控制器 内, 无须选件卡的支持 -如果选择其他类型总线通讯方式,需 要相应的总线卡支持 PROFIBUS --- DFP Interbus ------- DF1 Can ------------- DFC DeviceNet ----- DFD Ethernet ------- DFE
• 打开[MT-Manager] / [Shell] • 对变频器进行初始化 • 选择[Startup] / [Extended Positioning via bus]或[Main Menu]/[Applications]/[Extended Positioning via Bus] 1,,最初要打开P802,恢复出厂设置一下 (选取delivery state),结束后,要对变频器初始化!~ 2,要完全初始化,选择vector controled/servo~ 3,按要求输入电机铭牌数据,型号和编码器等~ 4,按系统推荐的惯量的8倍填写惯量,有抱闸!临时取消硬限位SW~ 5,设定setpoint 和control point 为fieldbus!!P100/P101 6,把参数的P6OX,/61X/63X都设定为no faction!! 7,P835为启用电机过热报警的设定!没有可以取消! 8,P9xx参数为IPOS专用,P903为寻参类型,一般选8(当前位置设定 为参考0位,执行寻参一下就发现当前位置变为0了!!) 9,P905为参考偏置,可以修改它从而把当前位置改为你想要的值! 10,要在电机自动模式运行前进行寻参模式,否则变频器无法自动模 式运行(寻参成功的标志是变频器反馈信号 PI 1.2:ipos reference) 11,可以用变频器的control mode 控制手动运行电机,设定好所给参 数(两个使能,模式信号,给定速度和目标位置,STAR,之后一定点 击:send PA,这样设定值就送给变频器了!