注塑机机械手定制
机械手自动加螺丝装置在注塑机上的运用

机械手自动加螺丝装置在注塑机上的运用发布时间:2022-10-27T05:29:06.924Z 来源:《科技新时代》2022年第11期作者:李开旭刘菲菲吴云亨[导读] 在注塑生产过程中,注塑机设备增加机械手自动加螺丝装置姓名:李开旭刘菲菲吴云亨单位:贵州航天精工制造有限公司摘要:在注塑生产过程中,注塑机设备增加机械手自动加螺丝装置,能够有效提高注塑的生产效率和生产产量,因此本文通过深入分析机械手自动加螺丝装置在注塑机上的原理和运用,从而实现高效率的机械手自动化目的。
关键词:注塑机;机械手;自动加螺丝装置引言:在部分注塑产品生产中,需要首先在模具中放置好螺丝,然后再进行注塑,这种情况下,注塑机通常处于半自动生产,严重影响到产品的生产效率,而将机械手自动加螺栓装置运用到注塑机的生产中,可以避免注塑机半自动生产的情况,使整个生产效率得到了大幅度提升。
1.注塑机机械手自动加螺丝装置的构成机械手自动加螺丝装置组成部分中,主要包括PLC三菱FX1S-14MR,电磁阀SMC两位两通电磁阀、真空发生器、真空开关、光电传感器、夹具,机械手自动加螺丝装置的构成如图1所示。
图1:机械手自动加螺丝装置构成图2.注塑机机械手自动加螺丝装置的生产流程注塑机机械手自动加螺丝装置的生产流程由以下几个步骤组成,首先是注塑机启动后,注塑机开模完成后会给机械手发送相应的开模信号,当机械手接收到对应的信号后,会根据程序设置将已经装置好的螺丝夹具放在指定的模具内部,随后注塑机给予成型[1]。
当注塑产品成型后,机械手将成型的产品取下,并将夹具上已经装好的螺丝装入模具中,当机械手离开注塑机模具位置后,会个注塑机发送离开信号,而注塑机接收到机械手离开的信号后自动开始合模生产,合模生产结束后,机械手会移动到产品的放置位置,等待成型成品出模,然后机械手移动到制定位置,将放在模板上的螺丝吸到夹具上,完成一个周期的生产循环后等待下一次信号指令开始重复性动作。
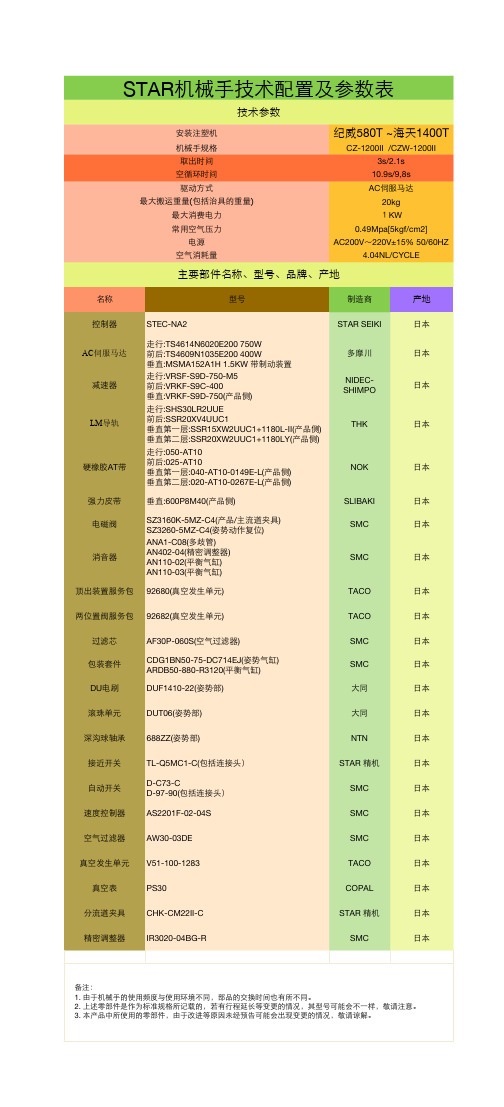
STAR机械手技术参数及部品表副本
走行:050-AT10 前后:020-AT10-0420E-L 垂直第一一层:040-AT10-0281E-L(产品侧) 垂直第二层:075-AT10-0162E-L(产品侧)
NOK
日本
强力皮带
垂直:600P8M40(产品侧)
SLIBAKI
日本
电磁阀 消音器
SZ3160K-5MZ-C4(产品/主流道夹具) SZ3260-5MZ-C4(姿势动作复位)
ANA1-C08(多歧管) AN402-04(精密调整器) AN110-02(平衡气缸) AN110-03(平衡气缸)
SMCቤተ መጻሕፍቲ ባይዱ
日本
主要部件名称、型号、品牌、产地
名称
型号
制造商
产地
控制器
STEC-NA2
STAR SEIKI
日本
AC伺服马达
走行:TS4614N6020E200 750W 前后:TS4609N1035E200 400W 垂直:MSMA152A1H 1.5KW 带制动装置
多摩川
日本
减速器
走行:VRSF-S9D-750-M5 前后:VRKF-S9C-400 垂直:VRKF-S9D-750(产品侧)
SMC
日本
顶出装置服务包 92680(真空发生单元)
TACO
日本
两位置阀服务包 92682(真空发生单元)
TACO
日本
过滤芯 包装套件 DU电刷
AF30P-060S(空气过滤器)
2024年注塑机机械手市场环境分析

2024年注塑机机械手市场环境分析1. 市场概况注塑机机械手是在注塑成型生产过程中自动取出成品或辅助操作的机器人装置。
随着注塑成型业的发展,注塑机机械手市场也呈现出快速增长的态势。
本文将对注塑机机械手市场的环境进行全面分析。
2. 竞争态势目前注塑机机械手市场上存在着多家主要竞争厂商,如ABC Company、XYZ Group和DEF Corporation等。
这些公司在产品质量、创新能力和服务等方面都有一定的竞争优势。
同时,市场上也不断涌现出新的竞争对手,给市场竞争带来一定的不确定性。
3. 市场需求注塑机机械手在注塑成型生产过程中发挥着重要作用,能够提高生产效率、降低人力成本,并减少因操作错误而导致的产品损坏。
随着制造业的发展和自动化程度的提高,市场对注塑机机械手的需求不断增加。
尤其是在汽车零部件、电子产品和家电等行业,需求量更为旺盛。
4. 市场发展潜力中国是全球注塑机机械手市场最大的消费国家和生产国家之一,市场规模庞大,具有巨大的发展潜力。
首先,随着技术的进步,注塑机机械手的功能不断丰富,应用范围不断扩大。
其次,中国制造业的转型升级和自动化改造需求提升,将进一步推动注塑机机械手市场的发展。
再次,国家政策对于自动化设备的支持力度加大,为注塑机机械手市场的发展创造了良好的政策环境。
5. 市场挑战在快速发展的同时,注塑机机械手市场也面临一些挑战。
首先,产品同质化严重,市场竞争激烈,厂商需要不断提高产品质量和技术水平,以保持竞争优势。
其次,注塑机机械手的价格相对较高,限制了一些中小企业的使用。
另外,市场需求不稳定,随着市场需求的波动,注塑机机械手市场也会面临一定的市场风险。
6. 市场前景尽管注塑机机械手市场面临着一些挑战,但总体上看,市场前景仍然广阔。
随着制造业的转型升级,注塑机机械手市场有望得到进一步发展。
未来,随着技术的创新和成本的降低,注塑机机械手的市场份额有望进一步扩大。
同时,市场也将持续关注产品的智能化程度和节能环保特性,这将成为厂商竞争的重要方向。
注塑机机械手使用方法
注塑机机械手使用方法注塑机机械手是一种用于注塑机操作和自动化生产的设备。
它具有精确的定位控制,高效的作业速度和稳定的运行性能,被广泛应用于制造业的各个领域。
下面将详细介绍注塑机机械手的使用方法。
一、安装调试1. 检查注塑机机械手的外观和内部结构,确认设备完好无损。
2. 将机械手安装在注塑机旁边的工作台上,确保机械手与注塑机之间有足够的操作空间。
3. 将机械手的电源线和控制线连接到对应的电源和控制系统上。
4. 根据注塑机的参数设置,对机械手进行调试和校准,确保它能够准确地抓取注塑件并进行操作。
二、操作流程1. 开机准备a. 打开注塑机和机械手的电源开关。
b. 启动注塑机和机械手的控制系统,并进行初始化。
c. 清理注塑机的工作台和周围环境,确保工作环境整洁。
2. 参数设置a. 根据注塑件的尺寸、重量和工艺要求,设置机械手的抓取和操作参数,包括抓取点坐标、速度、力度等。
b. 根据生产任务的要求,设置机械手的作业模式,如单循环操作、连续运行、自动换模等。
3. 作业操作a. 手动操作:通过控制面板或操作手柄控制机械手进行手动操作,包括移动、抓取、放置等。
进行手动操作时,需要操作员具备相关技术和经验,确保操作安全和准确。
b. 自动化操作:通过预设程序和触发信号,实现机械手的自动化操作。
操作员只需设置好注塑机和机械手的参数,启动自动操作模式,机械手将按照预设程序进行操作,减少人工干预和提高生产效率。
4. 监控和调试a. 在操作过程中,及时监测机械手的运行状态和作业效果,如抓取力度、抓取准确度等。
如有异常或问题,及时进行调整和修复。
b. 定期对机械手进行保养和维护,清洁抓取爪、油润滑系统、检查电气部件的连接情况等,确保设备的正常运行和延长使用寿命。
5. 安全操作a. 在操作注塑机机械手时,操作员应严格按照操作规程进行操作,遵守安全生产规范。
b. 在进行机械手操作前,确保注塑机停止工作,避免误操作引起事故。
6. 故障排除a. 如果机械手出现故障或异常,及时停机排除故障,避免对生产环节造成影响。
注塑机的上下料机械手设计
摘要本文对机械手进行了总体方案设计,确定了机械手的座标型式和自由度,确定了机械手的技术参数。
同时,设计了机械手的夹持式手部结构;设计了机械手的手臂结构。
设计出了机械手的液动系统,绘制了机械手液压系统工作原理图。
利用可编程序控制器对机械手进行控制,选取了合适的PLC型号,根据机械手的工作流程制定了可编程序控制器的控制方案,画出了机械手的工作时序图和梯形图,并编制了可编程序控制器的控制程序。
关键词:机械手,液动,可编程序控制器(PLC)AbstractIn this paper, hands on mechanical design of an overall program to determine the coordinates of the robot type and degree of freedom to determine the technical parameters of the manipulator. At the same time, the design of the mechanical hand gripping the hand-type structure; designed robot arm structure. Designed hydraulic manipulator system manipulator drawn schematic diagram of hydraulic system.The use of programmable logic controller to control the robot, select the appropriate PLC model, based on workflow manipulator developed a PLC control program, the mechanical hand to draw timing diagrams and ladder work and preparation that can be controller programmed control procedures.Key words: mechanical hand, hydraulic, programmable logic controller (PLC)目录内容摘要 (1)关键词 (1)Abstract (1)Key word (1)第1章绪论 (2)1.1机械手概述 (2)1.2机械手的组成和分类 (2)1.3课题的提出及主要任务 (4)第2章机械手的设计方案 (6)2.1机械手的座标型式与自由度和工作范围 (6)2.2 机械手的手部结构方案设计 (7)2.3 机械手的手臂结构方案设计 (7)2.4机械手的驱动方案设计 (7)2.5 机械手的控制方案设计 (7)2.6机械手的主要参数 (7)2.7机械手的技术参数列表 (8)第3章手部结构设计 (10)3.1手部设计 (10)3.2手部夹紧液压缸的设计 (11)第4章手臂结构设计 (15)4.1手臂伸缩 (15)4.2手臂升降和回转部分 (16)4.3手臂伸缩液压缸的设计 (16)4.4 液压系统主要参数 (19)4.5液压系统图 (25)第5章机械手的控制系统 (28)5.1 可编程序控制器的选择及工作过程 (28)5.2可编程序控制器的使用步骤 (29)5.3机械手可编程序控制器控制方案 (29)第6章致谢 (33)第7章参考文献 (34)第1章绪论1.1机械手概述工业机器人由操作机、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
2024年注塑机机械手市场分析现状
2024年注塑机机械手市场分析现状前言注塑机机械手是在注塑机生产过程中,用于自动化操作的关键设备。
在现代制造业中,随着注塑行业的快速发展和自动化需求的增加,注塑机机械手市场也在迅速扩大。
本文将对注塑机机械手市场的现状进行分析。
市场规模与增长趋势目前,全球注塑机机械手市场规模庞大且持续增长。
根据市场研究机构的数据显示,2019年全球注塑机机械手市场规模达到XX亿美元,预计到2025年将达到XX 亿美元,年均增长率约为XX%。
市场规模的增长主要受益于注塑行业的快速发展。
随着人们对塑料制品的需求不断增加,注塑行业也在不断壮大。
注塑机机械手作为注塑生产线上的必备设备,受益于注塑行业的增长。
此外,注塑机机械手的自动化、高效率和精准性等优势也吸引了更多企业的关注和应用。
市场竞争格局目前,全球注塑机机械手市场竞争激烈,市场上存在着多家知名供应商。
这些供应商主要包括ABB、KUKA、Yushin Precision Equipment、ENGEL等。
这些供应商通过提供高品质、高性能的产品,以及广泛的售后服务网络,获得了广大客户的认可和信赖。
此外,市场上还存在一些本土供应商,他们通过提供具有竞争力的价格和个性化的解决方案,逐步扩大了市场份额。
这些本土供应商在本地市场具有一定的优势,并且通过技术升级和创新不断提升竞争力。
市场发展趋势注塑机机械手市场的发展趋势主要体现在以下几个方面:1. 自动化水平提升随着注塑行业对自动化生产的需求不断增加,注塑机机械手在自动化水平上将会进一步提升。
未来的注塑机机械手将更加智能化,具备更高的自主性和灵活性。
同时,注塑机机械手还将与其他智能设备进行联动,实现更高效的生产。
2. 技术创新技术创新是注塑机机械手市场发展的重要动力。
随着科技的进步,新型材料、新工艺、新技术将会不断涌现,注塑机机械手也将会不断升级。
例如,基于机器学习和人工智能的注塑机机械手将能够更好地适应复杂的生产环境,并具备更高的精准度和灵敏度。
注塑机械手需要注意

注塑机械手需要注意注塑机械手是注塑生产线中非常重要的设备,主要用于注塑机中的成型件自动化抓取、出料和镶嵌等环节,因此,其操作流程需要注意以下事项,以确保生产顺利进行。
安全事项保证机械手操作区域无人员存在在进行注塑机械手操作时,需要确保机械手操作区域内没有人员存在,以避免意外发生。
关注机械手的运动轨迹对于注塑机械手的运动轨迹,操作人员需要保持密切关注,以预防可能存在的磕碰或撞击。
定时进行检查注塑机械手需要定期进行检查和维护,以确保其正常运转。
检查内容包括检查机械手的手臂、托盘、夹持装置等是否存在磨损和疲劳等情况,对于发现的损坏或疲劳部位,需要及时更换以确保机械手安全。
操作事项合理调节机械手的速度不同的工件需要不同的运动速度,因此,操作人员需要根据生产需要合理调节注塑机械手的速度,以确保生产效率和质量。
确保机械手执行的动作准确无误机械手所执行的动作需要准确无误,包括动作距离、起始点和终止点等,操作人员需要对机械手进行仔细调试,以保证机械手的执行准确无误。
操作细节维护好工作环境的清洁和整洁良好的工作环境对于机械手的运行很有帮助。
通过保持工作环境的清洁和整洁,可以有效减少机械手在生产线上的操作时间,从而提高生产效率。
增加安全防护装置为确保机械手的安全运行,操作人员可以增加一些防护装置,如安装红外线保护装置、增加气囊缓冲装置等。
使用有效的工具维护机械手在对注塑机械手进行维护时,需要使用有效的工具,包括扳手、螺丝刀、钳子、扫帚等。
对于机械手的手臂、托盘、夹持装置等部位,需要定期进行检查和维护,确保其正常运行。
结论注塑机械手是非常复杂的设备,操作人员需要注意其安全性和操作细节,确保机械手的正常运行并提高生产效率。
了解这些操作事项,可以帮助操作人员在工作中更好地运用注塑机械手,并有效提高生产效率和质量。
注塑机机械手编程操作方法
注塑机机械手编程操作方法(总2页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除650注塑机机械手编程操作方法1.先原点复归,按“原点复归”后,按下“?□”(开始/停止键),机械手自动原点复归;2.动作顺序编程:原点直线移动等待点(X轴、Y轴的值要设置,Z轴为0)姿势复归姿势复归时间(1.00S),姿势监控(5S)开模完成直线移动下降点1(X轴、Y轴值和等待点一样,Z轴要设置)直线移动前行点1(模具)(X轴、Z轴的值不变和下降点1一样,Y轴值要设置)计时(0.5S)治具闭(吸着1使用或夹具1使用)计时T13(0.5S)直线移动后退点1(X轴、Z轴的值不变;Y轴的值可以和等待点的一样)直线移动上升点1(X轴和Y轴的值不变,Z的值为0)姿势动作(姿势时间1S,姿势监控5S)允许合模直线移动前行点2(X轴不变,和等待点一样,Z值为0,Y轴值变大,要设置)直线移动横出点1(X轴的值变大,到达工作台上方,Y轴不变和前行点一样,Z轴为0)直线移动下降点2(到工作台面,X轴和Y轴的值不变,Z轴的值变大)治具开(吸着1使用或夹取1使用)计时直线移动上升点2(和横出点1的值一样,X轴,Y轴不变,Z值为0)直线移动横入点(Y轴、Z轴的值不变,X轴变小,这里可以取等待点的X,Y,Z轴点的数值)返回3.设置要领3.1 原点复归3.2等待点(最好是在开模后动、定模之间距离的一半的上方,以不挂到零件为好,这里X值、Y值都设置[X1,Y1],Z值为[Z1=0])3.3 姿势复归(不用设置)3.4 开模完成3.5下降点1(下降高度以能吸住零件为准,X、Y值和等待点一样[X2=X1,Y2=Y1],Z值要设置[Z2])3.6前行点1(X轴值X3=X1,Z轴值Z3=Z2,Y轴的值要设置[Y3])3.7 计时(0.5S),主要防止吸不住零件;3.8治具闭(选择吸着1使用或者夹取1使用)3.9计时T13(0.5S)3.10 后退点1(X轴值X4=X2=X1,Y轴值Y4=Y2,Z轴值Z4=Z2)3.11 上升点1(X轴值X5=X1,Y5=Y1,Z5=Z1=0)3.12 姿势动作3.13 允许合模3.14 前行点2(X轴值X6=X1,Z轴值Z6=Z1=0,Y轴值[Y6]要设置)3.15 横出点(X轴值要设置[X7],Y轴值Y7=Y6,Z轴值Z7=Z1=0)3.16 下降点2(X轴值X8=X7,Y轴值Y8=Y7=Y6,Z轴值要设置[Z8])3.17 治具开(选择吸着1使用或者夹取1使用)3.18 上升点2(X轴值X9=X8=X7,Y轴值Y9=Y8=Y7=Y6,Z轴值Z9=Z1=0)3.19 横入点=前行点2(X轴值X10=X6=X1,Y轴值Y10=Y6,Z轴值Z10=Z1=0)3.20 返回 Y轴X轴Z轴。
注塑机专用机械手原理
注塑机专用机械手原理
一、塑机机械手介绍
塑机机械手是全自动组装线的重要部件,由于其特定的结构,可以自动完成诸如感测、定位、抓取、取放、拧锁等多种任务。
它是一种多轴、多功能的机械手,由主轴、副轴以及夹具组成,可抓取各种形状的配件,如螺钉、螺母、弹性连接器和五金件等,将它们固定在或从组装底座上拧下。
它可以拆卸组装复杂度大、体积小的配件,并自动完成裱胶、焊接、塑封等流程,满足各种机械装配线的需求。
1.传动原理:机械手的传动系统采用两类主要传动方式,一种是有源传动,一种是无源传动,无源传动使用气压传动原理,可实现无摩擦、无噪音、无磨损的运动;有源传动使用电机驱动,采用恒功率控制,提高传动效率,有效降低传动时的能耗。
2.定位原理:机械手的定位通过微处理器控制实现,由传感器检测位置信号,根据指令进行位置调整。
3.夹持原理:机械手的夹持主要通过夹持器的张紧力实现,夹持器配有电动牵引装置,可根据夹持物料的位置和夹角灵活调节,以达到最佳夹持效果。
4.控制原理:机械手的控制系统可通过手动控制、触摸屏控制以及PC控制。
什么是海天注塑机专用机械手

什么是专用注塑机械手
塑机专用机械手是能够模仿人体上肢的部分功能,可以对其进行自动控制使其按照预定要求输送制品或操持工具进行生产操作的自动化生产设备。
富井注塑机械手是为注塑生产自动化专门配备的机械,它可以在减轻繁重的体力劳动、改善劳动条件和安全生产;提高注塑成型机的生产效率、稳定产品质量、降低废品率、降低生产成本、增强企业的竞争力等方面起到极其重要的作用。
机械手几种分类:
按驱动方式分为:气动,变频,伺服。
按机械结构分为:旋转式,横行式,侧取式,立式。
按手臂结构分为:单截,双截,三截。
按手臂多少分为:单臂和双臂。
按X轴结构分为:挂臂式和框架式。
按照控制程序的不同分为:多套固定程式和可自主编辑程式。
按手臂可移动区分设备大小,一般以100MM递增。
分类原因名称适用范围优点缺点
驱动方式气动几呼全部适用速度快成本低,
维护简单
动作速度可控性差
噪音大
变频几呼全部适用速度快可控性好外观较大,能耗稍高伺服全部适用速度位置可控性好
无噪音,能耗低
设置较多,成本较高
机械结构旋转式较小的注塑机一般240T以下
横行式所有能满足安装空间的卧式注塑机侧取式对安装空间有要求,或是特定环境立式多数为针对立式注塑机
手臂结构单截任何满足安装空间的地方。
双臂对安装空间有一定要求的地方。
三截能很大程度节约安装空间。
手臂多少单臂两板模具,或只取产品或料头
双臂任何模具
X轴结构挂臂式任何地方结构稳固外观美观紧凑感强框架式任何地方结构轻便外观看较宽大更轻控制程序固定程式
可编辑程式
手臂行程一般以100MM递增。
注塑机专用机械手要点

赖控制系统来达到。
在控制系统的指挥下,机械手按照预定的工作程序完成各个动作,从而将注塑生产出的制品从模具中取出并传送到指定地点或下一个生产工序中,并向模腔中喷洒脱模剂。
在设计时,应根据注塑机的性能,机械手的作业条件和要求,制品的形状和重量等来确定控制系统。
一般来说,设计或选用控制系统应遵循以下一些要点:(1)应确保机械手有足够的定位精度;(2)应注意机械手与注塑机的动作配合协调,确保机械手抓取制品离开模具后,注塑机和机械手能够各自继续进行动作,从而减少时间浪费;(3)应注意控制机械手的运行速度,即要使机械手能够满足注塑成型最短周期的要求,有要考虑是否会产生惯性冲击和振动;(4)应考虑控制系统的费用与实际工作要求之前的平衡关系。
工作步骤注塑用机械手在抓取制品及喷洒脱模剂时一般采用如下的工作步骤:机械手手臂下降并引发注塑机开模-注塑机顶出注塑制品并向机械手发出顶出信号一机械手伸入模腔中抓取制品-机械手向模腔喷洒脱模剂一机械手上升离开模腔一机械手向注塑机发出闭模信号并引发注塑机闭模—机械手移动到指定位置处放下制品一机械手回复到原位准备进行下一次动作。
编辑本段五、技术参数注塑用机械手的技术参数确定机械手的规格和工作性能,主要的技术参数有以下几点:抓重:机械手抓取制品的额定重量或载荷手臂的运动参数包括手臂的伸缩,升降,回转等运动速度和范围;手部的抓取范围及抓取力的大小;定位精度:位置的设定精度和重复定位精度;定位方式:点位控制或连续轨迹控制方式;驱动系统参数:控制系统参数;机械手的工作循环时间;自由度数目和坐标形式等。
编辑本段六、发展趋势由于注塑机专用机械手能够大幅度的提高生产率和降低生产成本,能够稳定和提高注塑产品的质量,避免因人为的操作失误而造成的损失。
因此,注塑机械手在注塑生产中的作用变得越来越重要。
目前国内的机械手类型比较简单,且大都用于取件。
随着自动化技术的发展,目前全伺服马达驱动的注塑机械手,可以实现除取件外得其他功能,比如模内贴标、模内镶嵌、装箱、码货等更多功能;或许以后,还有更多的机械手用于上料、混合、自动装卸模具、回收废料等各个工序上,而且将朝着智能化方向发展。
注塑机专用机械手控制器设计
当前 , 中国注塑 机产 业发 展迅 猛 , 年都 以超 过 每
3 % 的速 度增 长 。 随着 产 业 的发 展 , 户对 注 塑 机 0 用
自动化 程度 的要求 也 越来越 高 。大 型的企 业有 几 十
甚 至几百 台注塑机 需 要 管 理 , 且 生 产 高 质量 的 产 而
品不能 用人 手来取 产 品 , 这个 时 候 就 需 要 用 到 注 塑 机 专用 机械 手 。采 用该 机 械手取 产 品不仅 大大 提 高
了生产效 率 , 而且 大量 节省 了操 作员 工 , 高 了操作 提 人 员 的安全性 和舒 适 程度 , 以注 塑 机 专 用 机 械 手 所
的需求越 来越 大 。但是 当前 我 国 内地 几乎 还没 有 什 么企业 生产 注塑机 专 用机 械 手 的 , 械 手 产 品 大 量 机
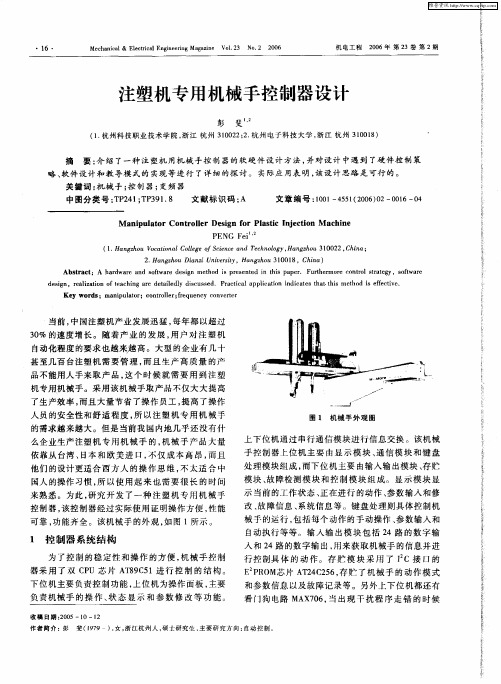
图 1 机械 手 外 观 图
M a iuao o tol einfrPat net n M ahn np ltrC nr l rD s lsi Ijci c ie e g o c o
PENG i Fe
( . n z o oain lC l g fS inea d T c n lg Ha gh u3 0 2 C ia; 1 Ha gh u V c t a ol eo ce c n eh oo y, n z o 0 2, hn o e 1 2 Ha g h uDin lU i ri . n z o a z nv st e y,Ha gh u3 0 1 n z o 1 0 8,C ia) hn
维普资讯
・
1 - 6
Mehncl Eetcl nier gMaaie V 12 N . 2 0 caia & lc i gnei gzn o. 3 o 2 0 6 ra E n
注塑机机械手工作原理
注塑机机械手工作原理注塑机机械手是一种自动化设备,主要用于在注塑生产过程中,对注塑成型机进行自动取料、放料、堆垛等操作。
它的作用是将已经注塑成型的制品,从注塑机上取下,并进行下一步的操作,如堆垛、包装等。
机械手的作用是节约人力成本,提高生产效率,减少人为操作对产品的影响,确保产品的质量。
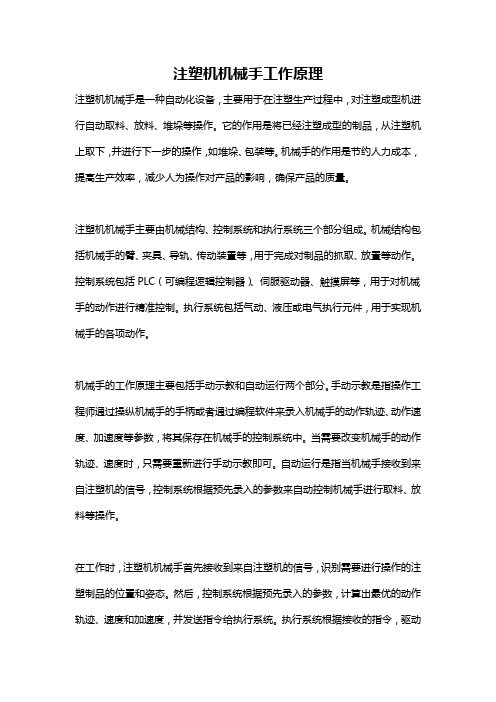
注塑机机械手主要由机械结构、控制系统和执行系统三个部分组成。
机械结构包括机械手的臂、夹具、导轨、传动装置等,用于完成对制品的抓取、放置等动作。
控制系统包括PLC(可编程逻辑控制器)、伺服驱动器、触摸屏等,用于对机械手的动作进行精准控制。
执行系统包括气动、液压或电气执行元件,用于实现机械手的各项动作。
机械手的工作原理主要包括手动示教和自动运行两个部分。
手动示教是指操作工程师通过操纵机械手的手柄或者通过编程软件来录入机械手的动作轨迹、动作速度、加速度等参数,将其保存在机械手的控制系统中。
当需要改变机械手的动作轨迹、速度时,只需要重新进行手动示教即可。
自动运行是指当机械手接收到来自注塑机的信号,控制系统根据预先录入的参数来自动控制机械手进行取料、放料等操作。
在工作时,注塑机机械手首先接收到来自注塑机的信号,识别需要进行操作的注塑制品的位置和姿态。
然后,控制系统根据预先录入的参数,计算出最优的动作轨迹、速度和加速度,并发送指令给执行系统。
执行系统根据接收的指令,驱动机械手的臂、夹具等机械结构,完成对注塑制品的抓取、放置等动作。
整个过程中,控制系统不断接收机械手的反馈信息,对机械手的动作进行实时调整,以确保机械手能够稳定、精准地完成操作。
机械手的工作原理可以简单概括为:接收信号-识别位置-计算轨迹-执行动作-实时调整。
通过PLC的逻辑控制,伺服驱动器的精准控制,机械手能够在短时间内完成高频率的精准动作,大大提高了生产效率。
另外,机械手在工作时还能够实时监测自身的工作状态,一旦发生故障,能够及时报警并停止工作,保证了安全生产。
注塑机机械手工作原理

注塑机机械手工作原理
注塑机机械手是一种用于自动化注塑生产的设备,它主要由机械臂、控制系统以及相关传动装置组成。
机械手的工作原理是通过控制系统对其进行程序编制,实现对注塑机的操作。
首先,控制系统会接收到相关信号,并将其转化为机械手的动作指令。
然后,机械臂通过传动装置进行动作执行。
在工作过程中,机械手一般要完成以下几个基本操作:
1. 取料:机械手根据程序指令定位,将注塑机旁边的原料箱中的物料取出,并将其传送到注塑机的进料口。
2. 开合模:机械手可以根据程序指令控制模具的开合动作,使其完成产品的注塑成型。
3. 取出产品:在注塑成型完成后,机械手会根据程序指令准确地将成品从注塑模具中取出,并将其放置到适当的位置。
4. 剪断和清理:对于一些需要剪断或清理的产品,机械手还可以进行相关的操作,确保产品质量。
5. 疏料排出:如果注塑过程中产生了废料或不合格品,机械手会将其排出,以保持生产区域的整洁。
机械手的工作原理依赖于高精度的控制系统,能够根据预设的
参数和指令,准确地完成各项操作。
它的应用使得注塑生产过程更加高效、精准,提高了生产效率和产品质量。
一种具有稳固型机械爪的注塑机机械手[实用新型专利]
![一种具有稳固型机械爪的注塑机机械手[实用新型专利]](https://img.taocdn.com/s3/m/7f213ba3e45c3b3566ec8b3d.png)
专利名称:一种具有稳固型机械爪的注塑机机械手专利类型:实用新型专利
发明人:张体深
申请号:CN201820368873.1
申请日:20180319
公开号:CN208409873U
公开日:
20190122
专利内容由知识产权出版社提供
摘要:本实用新型提供了一种具有稳固型机械爪的注塑机机械手,其包括机台,机台上安装有第一滑轨,第一滑轨水平布置,第一滑轨上滑动连接有第二滑轨,第二滑轨垂直于第一滑轨布置,第二滑轨上滑动连接有滑座,滑座上连接有第一安装座,第一安装座上铰接有第二安装座,第二安装座的端部开设有两对称设置的凹槽,凹槽内连接有第一杆体,第一杆体的端部具有弧形杆部,弧形杆部插入凹槽,凹槽的槽壁与弧形杆部之间设置有三角形空腔,三角形空腔内设置有垫块,第一杆体的表面上设置有多个吸盘,第一杆体上垂直交叉有多根第二杆体,多根第二杆体之间平行布置。
本实用新型相较于现有技术可以有效地提高机械手的整体结构的稳固性。
申请人:苏州宏成得尔塔塑胶有限公司
地址:215000 江苏省苏州市吴中区横泾街道越湖路4499号7幢
国籍:CN
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
现在很多的注塑工厂为了提高生产效率,都想把工厂的注塑生产线实现全自动化,让高效的注塑机械手来代替人工操作,虽说可以用注塑机械手来实现这个目标,但是每个工厂的实际情况都不是一样的,如果直接买来注塑机械手的话,很有可能并不适合自己的工厂,所以就需要定做了,那哪家定做注塑机械手比较好呢?
注塑机械手则是主要应用在注塑生产领域的智能机器人。
就注塑生产领域来说,相比较人工操作,注塑机械手能够使厂家从容应对人工流失率高、交货周期短、安全问题等多方面的挑战,高速、灵活、高负载的机械手不仅能够完成自动化生产,更能较大程度的提高产品效能。
这对注重效率的注塑生产行业来说至关重要。
此外,使用注塑机械手,还有以下优点:节省人力成本,使用注塑机械手的生产线完全可以实现自动化操作,一条生产线只需极少数人看管注塑机械手即可,无需再使用大量的人力资源,进而可以节约人力成本;安全性高,注塑机械手使工人作业的安全性得到了保证,不会再出现工人因为各种原因导致的工伤事故,提高生产车间的安全性;生产效率高,使用机械手可以使每一模产品的生产时间固定化,相同的塑化时间、射出时间、保压时间、冷却时间、开关模时间,容易
使产品的成品率提高;防止模具损坏,在注塑生产过程中,工人若未能成功取出产品,合模会造成模具损坏,而机械手若未能成功取出产品,则会自动报警停机,避免造成模具损坏;提高竞争力,相比使用人工的工厂,使用注塑机械手,能够提升车间形象,使产品品质得到保证,还可更加准确的计算产量,从而整体提升企业的竞争力。
芜湖大正百恒智能装备有限公司是一家专业研发生产销售机械手的智能科技公司,其生产的各类机械手(双臂回斜式机械手、回斜式机械手、双截单臂回斜式机械手、立式注塑机专用机械手、单臂回斜式机械手、中型一轴伺服横走式机械手、中型两轴伺服横走式机械手、CNC悬挂式全伺服机械手、CNC开放式全伺服机械手、中型三轴牛头式伺服机械手、重型三轴牛头式机械手、重型三轴牛头式伺服机械手),类型丰富,控制精度高,性能优异,价格实惠,是您减省工人、提高效率、降低成本、提高产品品质、提升工厂形象的好选择。
芜湖大正百恒智能装备有限公司位于安徽省芜湖市,专业研发、制造、销售注塑机械手,车床、磨床、冲压上下料机械手及周边自动化设备。
产品广泛适用于基础工业,汽车零部件,电子通信,环保化粪池,检查井、垃圾桶、托盘、食品包装,PET瓶坯,家电设备,光学制造等。
公司汇聚行业界经验丰富的技术精英及诚信专业销售团队,为您量身打造适合的自动化解决方案,我们深信优秀的产品品质是企业生存的基础,发展的前提。
一直采用世界先进的电器零部件,配合CNC精密加工,激光机切割,钣金加工,严格要求品质检验,以达到产品最佳效能。
更多详情请点击大正百恒智能查询,我们欢迎您!出师表
两汉:诸葛亮
先帝创业未半而中道崩殂,今天下三分,益州疲弊,此诚危急存亡之秋也。
然侍卫之臣不懈于内,忠志之士忘身于外者,盖追先帝之殊遇,欲报之于陛下也。
诚宜开张圣听,以光先帝遗德,恢弘志士之气,不宜妄自菲薄,引喻失义,以塞忠谏之路也。
宫中府中,俱为一体;陟罚臧否,不宜异同。
若有作奸犯科及为忠善者,宜付有司论其刑赏,以昭陛下平明之理;不宜偏私,使内外异法也。
侍中、侍郎郭攸之、费祎、董允等,此皆良实,志虑忠纯,是以先帝简拔以遗陛下:愚以为宫中之事,事无大小,悉以咨之,然后施行,必能裨补阙漏,有所广益。
将军向宠,性行淑均,晓畅军事,试用于昔日,先帝称之曰“能”,是以众议举宠为督:愚以为营中之事,悉以咨之,必能使行阵和睦,优劣得所。
亲贤臣,远小人,此先汉所以兴隆也;亲小人,远贤臣,此后汉所以倾颓也。
先帝在时,每与臣论此事,未尝不叹息痛恨于桓、灵也。
侍中、尚书、长史、参军,此悉贞良死节之臣,愿陛下亲之、信之,则汉室之隆,可计日而待也。
臣本布衣,躬耕于南阳,苟全性命于乱世,不求闻达于诸侯。
先帝不以臣卑鄙,猥自枉屈,三顾臣于草庐之中,咨臣以当世之事,由是感激,遂许先帝以驱驰。
后值倾覆,受任于败军之际,奉命于危难之间,尔来二十有一年矣。
先帝知臣谨慎,故临崩寄臣以大事也。
受命以来,夙夜忧叹,恐托付不效,以伤先帝之明;故五月渡泸,深入不毛。
今南方已定,兵甲已足,当奖率三军,北定中原,庶竭驽钝,攘除奸凶,兴复汉室,还于旧都。
此臣所以报先帝而忠陛下之职分也。
至于斟酌损益,进尽忠言,则攸之、祎、允之任也。
愿陛下托臣以讨贼兴复之效,不效,则治臣之罪,以告先帝之灵。
若无兴德之言,则责攸之、祎、允等之慢,以彰其咎;陛下亦宜自谋,以咨诹善道,察纳雅言,深追先帝遗诏。
臣不胜受恩感激。
今当远离,临表涕零,不知所言。