直流电机PI控制器参数设计
无刷直流电机PI控制系统的设计及分析

无刷直流电机PI控制系统的设计及分析杨林;刘曰涛;沈宝民;仲伟正【摘要】Traditional software controllers have such problems as slow running speed, low precision, poor immunity from interference, and high cost. A PI control system of BLDCM is presented based on complex programmable logic device to solve these problems. This system is composed of all hardware and adopts trapezoidal commutation control strategy. It has advantages of high response speed and strong immunity from interference. At the same time, the effect of different PWM modulation modes on armature current and electromagnetic torque of brushless current motor is analyzed, and the H-PWN—L-PWM modulation mode is selected to achieve the desired control effect. Finally, an experimental platform is built. The driver reaches stable state after 25.6 ms at the set speed of 2500 r/min. The results show that the system has good dynamic response performance.%针对传统软件控制方式运行速度慢、精度低、抗干扰能力差、成本高等问题,设计一种以复杂可编程逻辑器件(CPLD,complex programmable logic device)为核心的无刷直流电机PI控制系统.系统采用全硬件电路设计和梯形换向控制的策略,具有高响应速度和抗干扰能力.同时,分析不同脉冲宽度调制(PWM,pulse width modulation)方式对无刷直流电机续流回路和电磁转矩的影响,选取H-PWN—L-PWM的调制方式以达到理想的控制效果.最后搭建实验平台,控制系统在设定转速为2 500 r/min的情况下,经过25.6 ms到达稳定状态,结果表明该系统具有良好的动态响应性能.【期刊名称】《西安工程大学学报》【年(卷),期】2019(033)001【总页数】7页(P81-87)【关键词】无刷直流电机;可编程逻辑器件;PI控制系统;梯形换向控制;脉冲宽度调制【作者】杨林;刘曰涛;沈宝民;仲伟正【作者单位】山东理工大学机械工程学院, 山东淄博 255049;山东理工大学机械工程学院, 山东淄博 255049;山东理工大学机械工程学院, 山东淄博 255049;山东理工大学机械工程学院, 山东淄博 255049【正文语种】中文【中图分类】TM330 引言无刷直流电机具有质量轻、体积小、扭矩大、寿命长等优点,在工业控制、医疗器械、家用电器等领域有广阔的应用前景[1]。
直流电机PI控制器稳态误差分析
直流电机PI控制器稳态误差分析直流电机是一种常见的电动机类型,广泛应用于各个领域。
在控制直流电机运动过程中,PI控制器常用于控制其转速或位置。
在设计PI控制器时,稳态误差是一个重要的性能指标。
本文将对直流电机PI控制器稳态误差进行分析,并介绍如何通过调整PI控制器参数来减小稳态误差。
首先,我们需要了解什么是稳态误差。
稳态误差是指在控制系统达到稳定状态时,输出信号与期望信号之间的差异。
对于直流电机控制,稳态误差通常用来衡量电机的速度或位置达到设定值时的偏差。
1.积分动作的作用不足。
PI控制器通过积分动作来消除稳态误差,但如果积分时间过长或增益过小,积分动作可能无法完全消除误差。
2.系统本身的特性。
直流电机控制系统的稳态误差还受到电机动力学特性的影响,例如电机的阻尼特性和惯性特性等。
对于直流电机的速度控制,我们可以将系统的传递函数表示为:G(s)=K/(s(Ts+1))其中,K是系统的增益,T是系统的时延。
对于PI控制器,传递函数可以表示为:C(s)=Kp+Ki/s其中,Kp是比例增益,Ki是积分增益。
为了分析PI控制器的稳态误差,我们可以采用闭环传递函数的方式。
将直流电机的传递函数G(s)与PI控制器的传递函数C(s)相乘,得到闭环传递函数:T(s)=G(s)C(s)=(Kp+Ki/s)(K/(s(Ts+1)))通过计算T(s)的极点和零点,可以得到闭环系统的稳态误差特性。
对于速度控制系统而言,我们通常关注的是零频率处的稳态误差。
T(0)=(Kp+Ki/0)(K/(0(T0+1)))=Kp/K由上式可知,速度控制系统的稳态误差与比例增益Kp有关,而与积分增益Ki无关。
这意味着通过增大比例增益Kp,可以有效减小稳态误差。
但是,过大的比例增益Kp可能导致系统不稳定,因此在实际应用中需要进行适当的选择。
一种常用的方法是根据系统的响应特性进行调整。
当然,在实际控制过程中,我们还需要考虑到系统的动态特性。
如果系统的响应速度过慢,可能会导致误差积累较大。
直流电机PI转速控制(基于STC89C52RC)
{
SBUF=weima[na[i]];//静态显示,依次发送
while(TI==0);//未发送完,即等待
TI=0;//标记位置0
}
}
void timer0() interrupt 1//T0中断响应函数
{
TR0=0;//关闭定时器T0
PWM1=1;//高电平
TH0=0x15;//T0初值,60ms
unsigned int err=0,err_l=0;//全局变量,定义err表示err[k],err_1表示err[k-1]
unsigned int pwmh=0xd8;//全局变量,TH1初值
unsigned int pwml=0xf0;//全局变量,TL1初值
unsigned char weima[10]={0xfc,0x60,0xda,0xf2,0x66,0xb6,0xbe,0xe0,0xfe,0xf6};//LED数
na[1]=(pul%100000)/10000;//LED数码管第5位
na[2]=(pul%10000)/1000;//LED数码管第4位
na[3]= (pul%1000)/100;//LED数码管第3位
na[4]=(pul%100)/10;//LED数码管第2位
na[5]= pul%10;//LED数码管第1位
3.2流程图
图xx程序流程图
STC89C52RC(PDIP-40)单片机没有PWM输出口,所以需要用IO口模拟产生PWM信号,而且要求PWM信号的占空比可调,因此需要对单片机内部的T0、T1定时相关寄存器进行设置,PWM频率(1000/60HZ)由T0设置,改变PWM占空比由改变T1设置实现,即T1定时器的初值TH1和TL1两个寄存器的初值设定。电机的转速由光电传感器来采集,选用单片机的外部中断INT1口统计光电码盘的脉冲个数(pulse),因此需要对单片机的INT1相关寄存器进行设置。转速显示采用LED数码管,利用单片机的串口方式0进行静态显示,故需要对串口的相关寄存器进行设置。基于控制框图和以上说明,流程图绘制如下。图中PWM1表示单片机P1^6口,PWM1表示单片机P1^7口(可参考上文电路原理图部分)。
直流电机PI控制器参数设计_自控原理

课程设计任务书学生姓名: 专业班级: 指导教师: 刘志立 工作单位: 自动化学院题 目: 直流电机PI 控制器参数设计 初始条件:一直流电机控制系统的方框图如图所示,其中Y 为电机转速,a v 为电枢电压,W 为负载转矩。
令电枢电压由PI 控制定律求取,PI 表达式为:)(0⎰+=tI p a edt k e k v ,其中e=r-y 。
要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)(1) 写出以R 为输入的直流电机控制系统微分方程; (2) 计算W 到Y 的传递函数;(3) 试求k P 和k I 的值,使闭环系统的特征方程的根包括60j 60±-;D600601+s RYa ve+ -+1500W-(4)分析在单位阶跃参考输入、单位斜坡参考输入时系统的跟踪性能;(5)在Matlab中画出上述系统响应,并以此来证明(4)的分析结论。
(6)对上述任务写出完整的课程设计说明书,说明书中必须写清楚分析的过程,附Matlab源程序或Simulink仿真模型,说明书的格式按照教务处标准书写。
时间安排:任务时间(天)审题、查阅相关资料 2分析、计算 3编写程序 2撰写报告 2论文答辩 1指导教师签名:年月日系主任(或责任教师)签名:年月日摘要控制理论经过数十年的发展,并伴随计算技术的快速发展,如今已经形成相当成熟的理论,并在各个行业和领域得到广泛的应用。
本文所述的直流电机的PI控制就是其一方面的应用,文中将结合实例分析PI控制系统对单位阶跃和单位斜坡输入的响应,计算其动态和跟踪性能。
完成上述工作需借助功能强大的数学计算软件MATLAB,精确模拟系统的响应。
关键词:PI控制MATLAB目录1系统结构分析 (1)2数学模型 (2)2.1PI模型建立 (2)2.2单位反馈传递函数 (2)2.3扰动下的非单位反馈闭环传递函数 (2)2.4参数计算 (3)3动态跟踪性能分析 (4)3.1比例积分控制的分析方法 (4)3.2单位阶跃参考输入 (4)3.3单位斜坡参考输入 (5)4数学仿真与验证 (7)4.1MATLAB中连续系统模型表示方法 (7)4.2单位阶跃输入时的动态性能 (7)4.3单位斜坡输入时的动态性能 (8)5心得体会 (11)参考文献 (12)直流电机PI 控制器参数设计1系统结构分析1.1系统结构如下图图1-1 直流电机PI 控制结构图系统组成为比例积分环节、比例环节、惯性环节和单位负反馈,在比例环节与惯性环节之间加入扰动信号比较点。
永磁同步电机电流环PI_控制器参数整定及优化

1. 5R s ,此时电机的电角速度 ω e = 0,通过对式(2) 中
的 d 轴电压方程进行化简得到电阻值,为
第 10 期
刘 林等:永磁同步电机电流环 PI 控制器参数整定及优化
Rs =
2 ud
。
3 id
133
(3)
图 3 电流环控制框图
Fig. 3 Block diagram of current loop control
}
(2)
对永磁同步电机的内部结构进行分析,当给逆
类为基于模型的参数自整定 [5 - 8] ,这类参数自整定
变器施加固定占空比,电机得到固定电压,受电机内
方法为目前主流研究方法,基于模型的参数自整定
部的电感作用,电机的相电流将作用一段时间后快
对建立的数学模型和参数的精度依赖程度比较大;
速趋于稳定状态。 在空载情况下对电机参数进行辨
parameters with the best performance were optimized in the neighborhood of the initial value of PI parame-
ters by the two degree of freedom variable rotation method. The experimental results show that this method
法。 首先采用简单实用的离线参数辨识方法辨识出
电机的电阻和电感参数,然后将得到的电机参数代
入数学模型中整定出一组控制参数,最后以这一组
参数作为基于规则的参数自整定的初值,整定出最
优的控制参数,确保电机可以稳定启动运行。
1 永磁同步电机离线参数辨识
实验四 PID校正

微分 — 积分
图 6.1 模拟 PID 控制系统原理框图
PI 控制器 —
被控对象
D 控制器
图 6.2 微分先行 PID 控制原理图
I 控制器 —
被控对象
PD 控制器
图 6.3 伪 PID 控制原理图
PID 控制器是一种线性控制器,它根据给定值 r (t ) 与实际输出值 y (t ) 构成控制偏差 e(t ) :
6)
点击“
”编译程序,编译成功后在 MATLAB 命令窗口中有提示信息(如果没有修改控制界面结
构,在编译一次后,不需再进行此步骤) :
7) 8) 9)
点击“ ”连接程序,此时可听到电控箱中继电器接通时发出一声轻响。 点击“ ”运行程序, 电机开始转动,任其运行 10 秒钟左右,然后点击 停止程序, 双击打开示波器“Scope”,观察加入 2000rpm 的阶跃信号时直流伺服电机转速响应曲线,测量并 记录超调量 ,峰值时间
打开”Scope”,点击窗口左上角的 name”,“Format”选为 Array。
,勾选“Save data to workspace”,并可自定义输出的“Variable
10) 从“Simulink\ Commonly Used Blocks”中拉一个“Sum”到“untitled”窗口中:
11) 双击“Sum”模块,打开如下窗口,反馈设置如下图:
统的性能指标达到:ts≤1.5 秒,δp≤4.3%,稳态误差为 0。
三、实验设备
1. 2. GSMT2014 型直流伺服系统控制平台; PC、MATLAB 平台。
四、实验原理
1. PID 简介 PID 的控制算法有很多,不同的算法各有其针对性。图 6.1,图 6.2,图 6.3 给出了三种不同的算法。 在模拟控制系统中, 控制器最常用的控制规律是 PID 控制。 模拟 PID 控制系统原理框图如图 6.1 所示。 系统由模拟 PID 控制器和被控对象组成。 比例 被控对象
基于51单片机的直流电机转速PI控制

… …
图 xx 电路原理图
上图中 LED 数码管显示中的 74LS164 芯片的引脚及功能如下所述:
芯片引脚功能对照表
符号 SA、SB Q0~Q7 CP(CLK) VCC GND /MR(/CLR)
功能 串行数据输入端 并行数据输出端 时钟输入端(上升沿有效) 电源正(5V) 接地 清零端(低电平有效)
直流电机 PI 转速控制—基于 51 单片机
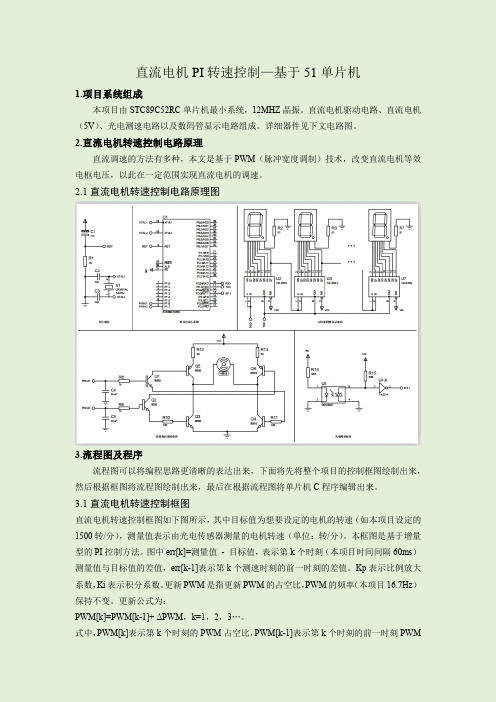
1.项目系统组成
本项目由 STC89C52RC 单片机最小系统,12MHZ 晶振。直流电机驱动电路、直流电机(5V)、光电测 速电路以及数码管显示电路组成。详细器件见下文电路图。
2.直流电机转速控制电路原理
直流调速的方法有多种,本文是基于 PWM(脉冲宽度调制)技术,改变直流电机等效电枢电压,以此 在一定范围实现直流电机的调速。
void timer1() interrupt 3 {
TR1=0; TH1=pwmh; TL1=pwml; PWM1=0;
//T1 中断响应函数
//关闭定时器 T1 //T1 重置初值 //T1 重置初值,改变 PWM 占空比 //输出低电平
}
void PID_pwm()
{
unsigned int speed=0,pwm=0,pwmhh=0,pwmll=0; speed=10*pulse; //脉冲数换算为转速(转/分)speed=60*pulse*1000/(12*50*10)
综上所述,要想电机正转,则需要 PWM1=1,同时 PWM2=0;要想电机反转,则需要 PWM2=1,同时 PWM1=0;要想电机停止,则需要 PWM1=1,同时 PWM2=1,或者 PWM1=0,同时 PWM2=0。
手把手教你玩转直流电机PID双环控制

⼿把⼿教你玩转直流电机PID双环控制1.速度闭环控制我们⼀般在速度闭环控制系统⾥⾯,使⽤增量式PI控制。
⽽在我们的微处理器⾥⾯,因为控制器是通过软件实现其控制算法的,所以必须对模拟调节器进⾏离散化处理,这样它只需根据采样时刻的偏差值计算控制量。
因此,我们需要使⽤离散的差分⽅程代替连续的微分⽅程。
假定采样时间很短时(我们的代码中是10ms),可做如下处理:①⽤⼀介差分代替⼀介微分;②⽤累加代替积分。
根据增量式离散PID公式Pwm+=Kp[e(k)-e(k-1)]+Ki*e(k)+Kd[e(k)-2e(k-1)+e(k-2)]e(k):本次偏差e(k-1):上⼀次的偏差e(k-2):上上次的偏差Pwm代表增量输出在我们的速度控制闭环系统⾥⾯只使⽤PI控制,因此对PID控制器可简化为以下公式:Pwm+=Kp[e(k)-e(k-1)]+Ki*e(k)具体通过C语⾔实现的代码如下:int Incremental_PI (int Encoder,int Target){float Kp=100,Ki=100; //PI参数由电机的种类和负载决定sta ti c int Bias,Pwm,Last_bias;Bias=Encoder-Target; //计算偏差Pwm+=Kp*(Bias-Last_bias)+Ki*Bias; //增量式PI控制器Last_bias=Bias; //保存上⼀次偏差return Pwm; //增量输出}⼊⼝参数为编码器的速度测量值和速度控制的⽬标值,返回值为电机控制PWM。
第⼀⾏代码为PI参数的定义,PI参数在不同的系统中不⼀样,我们的代码中的PID参数,仅针对平衡⼩车之家的电机空载时调试得到。
第⼆⾏是相关内部变量的定义。
第三⾏是求出速度偏差,由测量值减去⽬标值。
第四⾏使⽤增量PI控制器求出电机PWM。
第五⾏保存上⼀次偏差,便于下次调⽤。
最后⼀⾏是返回。
在10ms定时中断⾥⾯调⽤该函数实现我们的控制⽬标:Moto1=Incremental_PI(Encoder,Target_velocity);Set_Pwm(Moto1); //===赋值给对应MCU的PWM寄存器具体请结合完整代码理解,我们的代码基于STM32F103C8控制器,但是把基于C语⾔的PID控制器部分剥离,并放在control.c⾥⾯,故对STM32不熟悉的同学依然可以使⽤记事本打开这个⽂件观看。
直流电机双闭环PID调速系统仿真设计
目录直流电机双闭环PID调速系统仿真 (1)1 转速、电流双闭环直流调速系统的组成及工作原理 (2)2 双闭环调速系统的动态数学模型 (2)3 调节器的设计 (4)3.1 电流调节器的设计 (4)3.2 转速调节器的设计 (6)4 搭建模型 (8)5 参数计算 (10)5.1 参数的直接计算 (10)5仿真具体参数 (13)6 仿真结果 (13)7 结束语 (14)8 参考文献 (16)直流电机双闭环PID调速系统仿真摘要在工程的应用中,直流电动机的占有很大的比例,同时对于直流系统的调速要求日益增长。
在直流调速系统中比较成熟并且比较广泛的是双闭环调速系统,本文对于直流双闭环的PID调速系统作简要的设计,同时利用Matlab/Simulink 仿真软件进行仿真处理。
关键词: 直流双闭环 PID调速在现代化的工业生产过程中,许多生产机械要求在一定的范围内进行速度的平滑调节,并且要求有良好的稳态、动态性能。
而直流调速系统调速范围广、静差率小、稳定性好,过载能力大,能承受频繁的冲击负载,可实现频率的无级快速起制动和反转等良好的动态性能,能满足生产过程自动化系统中各种不同的特殊运行要求。
在高性能的拖动技术领域中,相当长时期内几乎都采用直流电力拖动系统。
开环直流调速由于自身的缺点几乎不能满足生产过程的要求,在应用广泛地双闭环直流调速系统中,PID控制已经得到了比较成熟的应用。
Matlab是目前国际上流行的一种仿真工具,它具有强大的矩阵分析运算和编程功能,建模仿真可视化功能Simulink是Matlab五大公用功能之一,他是实现动态系统仿真建模的一个集成环境,具有模块化、可重载、图形化编程、可视化及可封装等特点,可以大大提高系统仿真的效率和可靠性。
Simulink提供了丰富的模型库供系统仿真使用,它的仿真工具箱可用来解决某些特定类型的问题,也包括含有专门用于电力电子与电气传动学科仿真研究的电气系统模型库。
此外,用户可根据自己的需要开发并封装模型以扩充现有的模型库。
直流电机PI控制器参数设计_-自控原理

课程设计任务书学生姓名: 专业班级: 自动化0804 指导教师: XXX 工作单位: 自动化学院题 目: 直流电机PI 控制器参数设计 初始条件:一直流电机控制系统的方框图如图所示,其中Y 为电机转速,a v 为电枢电压,W 为负载转矩。
令电枢电压由PI 控制定律求取,PI 表达式为:)(0⎰+=tI p a edt k e k v ,其中e=r-y 。
要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)(1) 写出以v a 和W 为输入的直流电机系统微分方程; (2) 计算W 到Y 的传递函数;(3) 试求k P 和k I 的值,使闭环系统的特征方程的根包括50j 50±-; (4) 分析在单位阶跃参考输入、单位斜坡参考输入时系统的跟踪性能; (5) 在Matlab 中画出上述系统响应,并以此来证明(4)的分析结论。
(6) 对上述任务写出完整的课程设计说明书,说明书中必须写清楚分析的过程,附Matlab 源程序或Simulink 仿真模型,说明书的格式按照教务处标准书写。
G c (s)500501+s RYa ve + -+1200W-时间安排:任务时间(天)审题、查阅相关资料 2分析、计算 3编写程序 2撰写报告 2论文答辩 1指导教师签名:年月日系主任(或责任教师)签名:年月日摘要控制理论经过数十年的发展,并伴随计算技术的快速发展,如今已经形成相当成熟的理论,并在各个行业和领域得到广泛的应用。
本文所述的直流电机的PI控制就是其一方面的应用,文中将结合实例分析PI控制系统对单位阶跃和单位斜坡输入的响应,计算其动态和跟踪性能。
完成上述工作需借助功能强大的数学计算软件MATLAB,精确模拟系统的响应。
关键词:PI控制MATLAB目录1系统结构分析 (1)2数学模型 (2)2.1PI模型建立 (2)2.2单位反馈传递函数 (2)2.3扰动下的非单位反馈闭环传递函数 (2)2.4参数计算 (3)3动态跟踪性能分析 (4)3.1比例积分控制的分析方法 (4)3.2单位阶跃参考输入 (4)3.3单位斜坡参考输入 (5)4数学仿真与验证 (7)4.1MATLAB中连续系统模型表示方法 (7)4.2单位阶跃输入时的动态性能 (7)4.3单位斜坡输入时的动态性能 (8)5心得体会 (12)参考文献 (13)直流电机PI 控制器参数设计1系统结构分析1.1系统结构如下图图1-1 直流电机PI 控制结构图系统组成为比例积分环节、比例环节、惯性环节和单位负反馈,在比例环节与惯性环节之间加入扰动信号比较点。
基于Matlab的直流无刷电机IP控制的设计与仿真
0.643
-0.512
处理方法以满足更多的数据处理需求,将是下一步
0.352
-0.309
-0.317
0.339
0.477
发提高了实验的工作效率,促进了实验室的发展,
两相绕组工作。
(
)
JLs + J ( R s + G c ( s ) β ) s + 1.5K t α + G c ( s ) K p s + 1.5K t G c ( s ) K p
3
2
(2)
相 对 于 PI 控 制 策 略 的 无 刷 直 流 电 机 调 速 系
统,IP 控制策略的闭环传递函数具有相同的特征方
真结果表明该系统速度环的抗干扰能力提高了。
2
83
舰 船 电 子 工 程
无刷直流电动机控制
节器的速度环控制系统,如图 3 所示。电流环作为
普通的无刷直流电机采用三相电压型逆变器
为,β(s) 为电流环反馈回路传递函数。
速度环的内环,其中 G c (s) 为控制器传递函数表示
供电,其定子绕组为星型接法,如图 1 所示,其中
响应能力增强。根据幅频响应曲线可知增大 IP 控
制器比例增益可以提高系统响应带宽,而稳定裕度
变换很小,保留了原系统的鲁棒性。
5
结语
[5]黎永华,皮佑国. 基于磁定位原理的永磁同步电机转子
初始位置定位研究[J]. 电气传动,2010,40(3):28-31.
[6]陆华才,徐月同,杨伟民,等. 表面式永磁直线同步电机
loop,and the motor can obtain the speed response without overshoot,and has strong anti-disturbance ability. The simulation results
直流电机pi调节原理

直流电机pi调节原理直流电机是一种常见的电动机,广泛应用于工业生产和家庭电器等领域。
而PI调节是一种常用的控制算法,被广泛应用于直流电机的速度和位置控制中。
PI调节是一种比例-积分控制器,其原理是根据偏差信号来调整输出信号,以实现对系统的控制。
在直流电机控制中,PI调节器通常用于调节电机的转速或位置,使其达到期望的目标。
在直流电机控制中,PI调节器的输入是偏差信号,即期望值与实际值之间的差异。
通过比例控制和积分控制来调整输出信号,进而实现对电机的控制。
在比例控制中,输出信号与偏差信号成正比。
偏差信号越大,输出信号就越大,从而加快电机的响应速度。
而在积分控制中,输出信号与偏差信号的积分成正比。
积分控制的作用是消除系统的稳态误差,使电机能够更好地跟踪期望值。
当偏差信号较小时,比例控制占主导地位,输出信号的变化主要由比例控制器决定。
而当偏差信号较大时,积分控制逐渐起作用,输出信号的变化主要由积分控制器决定。
通过调节比例参数和积分参数,可以实现对电机控制的精确调节。
比例参数决定了输出信号对偏差信号的敏感程度,而积分参数决定了输出信号对偏差信号积分的敏感程度。
通过合理选择和调节这两个参数,可以使电机控制系统达到较好的性能。
在实际应用中,PI调节器常常与速度传感器和位置传感器配合使用,以获取实际值和期望值。
传感器将实际值反馈给PI调节器,PI调节器根据偏差信号进行调节,并将输出信号送往电机驱动器,控制电机的转速或位置。
总的来说,直流电机PI调节的原理是通过比例控制和积分控制来调整输出信号,实现对电机的精确控制。
通过合理选择和调节比例参数和积分参数,可以使电机控制系统达到较好的性能。
这种控制方法在直流电机的速度和位置控制中被广泛应用,并取得了良好的效果。
自动控制原理—直流电机PI控制器参数设计

yss (t ) t
1 120 和瞬态分量
1 60t 1 60t e cos 60t e sin 60t 120 120
组成。 系统误差响应为 e(t ) r (t ) y(t ) 。当时间 t 趋于无穷时,误差响应 e(t ) 的稳态值为稳态 e ( ) 误差,以 ss 标志。对于此处单位斜坡响应时,其稳态误差为 1 ess () t y () 120 误差响应为
目录
1 系统结构分析 .............................................................. 1 2 数学模型 .................................................................. 2 2.1PI 模型建立 ............................................................ 2 2.2 单位反馈传递函数 ...................................................... 2 2.3 扰动下的非单位反馈闭环传递函数 ........................................ 2 2.4 参数计算 .............................................................. 3 3 动态跟踪性能分析 .......................................................... 4 3.1 比例积分控制的分析方法 ................................................ 4 3.2 单位阶跃参考输入 ...................................................... 4 3.3 单位斜坡参考输入 ...................................................... 5 4 数学仿真与验证 ............................................................ 7 4.1MATLAB 中连续系统模型表示方法 .......................................... 7 4.2 单位阶跃输入时的动态性能 .............................................. 7 4.3 单位斜坡输入时的动态性能 .............................................. 8 5 心得体会 ................................................................. 11 参考文献 ................................................................... 12
PID控制PWM调节直流电机速度(12v)
PID算法介绍:本次设计主要研究的是PID控制技术在运动控制领域中的应用,纵所周知运动控制系统最主要的控制对象是电机,在不同的生产过程中,电机的运行状态要满足生产要求,其中电机速度的控制在占有至关重要的作用,因此本次设计主要是利用PID 控制技术对直流电机转速的控制。
其设计思路为:以AT89S51单片机为控制核心,产生占空比受PID算法控制的PWM脉冲实现对直流电机转速的控制。
同时利用光电传感器将电机速度转换成脉冲频率反馈到单片机中,构成转速闭环控制系统,达到转速无静差调节的目的。
在系统中采128×64LCD显示器作为显示部件,通过4×4键盘设置P、I、D、V四个参数和正反转控制,启动后通过显示部件了解电机当前的转速和运行时间。
因此该系统在硬件方面包括:电源模块、电机驱动模块、控制模块、速度检测模块、人机交互模块。
软件部分采用C语言进行程序设计,其优点为:可移植性强、算法容易实现、修改及调试方便、易读等。
本次设计系统的主要特点:(1)优化的软件算法,智能化的自动控制,误差补偿;(2)使用光电传感器将电机转速转换为脉冲频率,比较精确的反映出电机的转速,从而与设定值进行比较产生偏差,实现比例、积分、微分的控制,达到转速无静差调节的目的;(3)使用光电耦合器将主电路和控制电路利用光隔开,使系统更加安全可靠;(4)128×64LCD显示模块提供一个人机对话界面,并实时显示电机运行速度和运行时间;(5)利用Proteus软件进行系统整体仿真,从而进一步验证电路和程序的正确性,避免不必要的损失;(6)采用数字PID算法,利用软件实现控制,具有更改灵活,节约硬件等优点;(7)系统性能指标:超调量≤8%;调节时间≤4s;转速误差≤±1r/min。
1PID算法及PWM控制技术简介1.1PID算法控制算法是微机化控制系统的一个重要组成部分,整个系统的控制功能主要由控制算法来实现。
基于PID控制的直流电机调速系统方案

基于PID控制的直流电机调速系统1绪论1.1本课程的选题背景PID控制器(按闭环系统误差的比例、积分和微分进行控制的调节器)自30年代末期出现以来,在工业控制领域得到了很大的发展和广泛的应用。
它的结构简单,参数易于调整,在长期应用中已积累了丰富的经验。
特别是在工业过程控制中,由于被控制对象的精确的数学模型难以建立,系统的参数经常发生变化,运用控制理论分析综合不仅要耗费很大代价,而且难以得到预期的控制效果。
在应用计算机实现控制的系统中,PID很容易通过编制计算机语言实现。
由于软件系统的灵活性,PID算法可以得到修正和完善,从而使数字PID具有很大的灵活性和适用性,其中数字PID控制器是由软件编程在计算机内部实现的。
PWM控制的基本原理很早就已经提出,但是受电力电子器件发展水平的制约,在上世纪80年代以前一直未能实现。
直到进入上世纪80年代,随着全控型电力电子器件的出现和迅速发展,PWM控制技术才真正得到应用。
随着电力电子技术、微电子技术和自动控制技术的发展以及各种新的理论方法,如现代控制理论、非线性系统控制思想的应用,PWM控制技术获得了空前的发展。
到目前为止,已经出现了多种PWM控制技术。
PWM控制技术以其控制简单、灵活和动态响应好的优点而成为电力电子技术最广泛应用的控制方式,也是人们研究的热点。
由于当今科学技术的发展已经没有了学科之间的界限,结合现代控制理论思想或实现无谐振软开关技术将会成为PWM控制技术发展的主要方向之一。
在电机控制系统开发中,常常需要消耗各种硬件资源,系统构建时间长,而在调试时很难对硬件系统进行修改,从而延长开发周期。
随着计算机仿真技术的出现和发展,可用计算机对电机控制系统进行仿真,从而减小系统开发开支和周期。
计算机仿真可分为整体仿真和实时仿真。
整体仿真是对系统各个时间段对各个对象进行计算和分析,从而对各个对象的变化情况有直观的整体的了解,即能对系统进行精确的预测,如Proteus就是一个典型的实时仿真软件。
直流电机PI控制器设计与性能分析

直流电机PI控制器设计与性能分析引言:直流电机在电力系统、机械工程等行业有着广泛应用。
为了实现对直流电机的精确控制和调节,控制器的设计是必不可少的一步。
其中PI控制器是常用的一种控制器,它可以实现电机速度和位置的闭环控制,提高控制系统的稳定性和响应速度。
本文将对直流电机PI控制器的设计和性能进行详细分析。
1.直流电机控制原理:直流电机是一种转矩速度可控的电动机,其控制原理可以简单地描述为:根据给定的输入信号,控制电机的输出转速或转矩。
2.PI控制器原理:PI控制器是一种线性控制器,由比例(P)和积分(I)两个环节组成。
比例环节根据误差的大小对输出信号进行调节,积分环节则根据误差的时间积分来产生输出信号。
PI控制器的输出信号可以表示如下:u(t) = Kp * e(t) + Ki * ∫ e(t) dt其中,u(t)为输出信号,Kp为比例增益,Ki为积分增益,e(t)为误差信号。
3.直流电机PI控制器设计过程:(1)系统建模:根据直流电机的动态特性建立数学模型,一般可以使用电机的转速方程或转矩方程进行建模。
(2)设计目标:确定控制系统的设计目标,例如稳态误差、调节时间、超调量等。
(3)参数调整:根据设计目标选择合适的比例增益Kp和积分增益Ki,一般可以通过试验和仿真等方法进行参数调整。
(4)性能分析:对设计好的PI控制器进行性能分析,例如稳态误差、系统稳定性、频率响应等。
4.直流电机PI控制器性能分析:(1)稳态误差:稳态误差是指系统在稳定工作状态下输出与目标值之间的偏差。
对于PI控制器,当控制系统的比例增益Kp和积分增益Ki适当设置时,可使系统的稳态误差几乎为零。
(2)系统稳定性:系统稳定性是指控制系统在各种干扰和变动条件下能否保持稳定。
通过动态特性分析,可确定合适的比例增益Kp和积分增益Ki,以确保系统的稳定性。
(3)频率响应:频率响应是指系统对于不同频率幅度的输入信号的响应能力。
通过频率响应分析,可确定合适的比例增益Kp和积分增益Ki,以满足系统对不同频率幅度输入信号的要求。
无刷直流电机单神经元PI控制器的设计

E E T C D I E 2 1 V 1 0 No 8 L C RI R V 0 0 o. 4 .
无 刷 直 流 电机 单 神 经元 P 控 制 器 的设 计 I
高 渊 炯 , 润 科 , 军 , 少 瑞 郝 朱 黄 ( 海 理 工 大 学 光 电 信 息 与 计 算机 工 程 学 院 , 海 2 0 9 ) 上 上 0 0 3
的不 足 。为 了改 善 单 神 经 元 P D控 制 器 在 响 应 I
的快 速性 方面 的不足 , 引入 专家 系统 的思 想 , 立 建 规则 库 , 根据不 同 的系统运 行状态 , 采用 不 同的调
摘 要 : 究 了 一种 基 于专 家 系统 的单 神 经 元 P 控 制 器 , 将 其 应 用 于 无 刷 直 流 电 机调 速 系统 中 。控 制 器 研 I 并
实 现 了 P 参 数 的 在 线 调 整 , 具 有 P D控 制 器 良好 动 态 性 能 的 同时 , 少 微 分 项 对 系 统 稳 态 运 行 时 的 影 响 , I 在 I 减 并 较 好 地 克 服 了无 刷 直 流 电机 非 线 性 、 数 易 变 的 影 响 。仿 真 结果 表 明 , 于 专 家 系统 的单 神 经 元 P 控 制 器 参 基 I
自适 应 能力 好 , 应 快 , 棒 性 强 , 响 鲁 系统 静 态 和 动 态 特 性 良好ቤተ መጻሕፍቲ ባይዱ。 关键 词 : 刷 直 流 电 动 机 ; 家 系 统 ; 神 经 元 ; 无 专 单 比例 积 分 控 制 器
中 图分 类 号 : TM3 1 6 文献标识码 : A
De i n o i l — u o n r le n Ti i g Sy t m o s g f S ng e ne r n PI Co t o l r i m n s e f r DC u h e s M o o Br s l s tr
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
u=t
lsim(sys,u,t,0);grid
xlabel('t');
ylabel('y(t)');
title('ramp response')
输入程序并运行后,会自动弹出绘制的跟踪曲线,如下所示:
图4-2 PI系统单位斜坡输入响应
由上图可以看出,在输入信号后,输出与输入的误差由零逐渐增大,然后趋于一个稳定的值。为精确确定误差,下面单独对误差响应做分析。
摘要:控制理论经过数十年的发展,并伴随计算技术的快速发展,如今已经形成相当成熟的理论,并在各个行业和领域得到广泛的应用。本文所述的直流电机的PI控制就是其一方面的应用,文中将结合实例分析PI控制系统对单位阶跃和单位斜坡输入的响应,计算其动态和跟踪性能。完成上述工作需借助功能强大的数学计算软件MATLAB,精确模拟系统的响应。
在MATLAB命令框中输入程序:
num=[50,5000];
den=[1,100,5000];
step(num,den);
sys=tf(num,den);
ltiview;
敲击回车键后在弹出的LTIViewer框中导入sys函数,然后对绘制的曲线进行相应的设置后可以得到阶跃响应的各项指标点,如上升时间 、峰值时间 和调节时间 ,效果如下图所示:
时间安排:
1、课程设计任务书的布置,讲解 (半天)
2、根据任务书的要求进行设计构思。(半天)
3、熟悉MATLAB中的相关工具(一天)
4、系统设计与仿真分析。(三天)
5、撰写说明书。 (二天)
6、课程设计答辩(半天)
指导教师签名: 年 月 日
系主任(或责任教师)签名: 年 月 日
直流电机PI控制器参数设计
(2)计算W到Y的传递函数;
(3)试求kP和kI的值,使闭环系统的特征方程的根包括 ;
(4)分析在单位阶跃参考输入、单位斜坡参考输入时系统的跟踪性能;
(5)在Matlab中画出上述系统响应,并以此来证明(4)的分析结论。
(6)对上述任务写出完整的课程设计说明书,说明书中必须写清楚分析的过程,附Matlab源程序或Simulink仿真模型,说明书的格式按照教务处标准书写。
其中
带入 ,则:
2.4
由闭环传递函数得系统特征方程为:
根据设计需要,因单位反馈闭环传递函数特征根包括 ,则根据特征根,可推断
继而化简得
因此
即
, 。
从而闭环系统的传递函数为
3动态跟踪性能分析
3.1
采用分析法研究比例积分控制系统的动态和跟踪性能。
PI控制开环传递函数形如:
令
则
令 ,可得闭环传递函数为
其中
组成。
系统误差响应为 。当时间 趋于无穷时,误差响应 的稳态值为稳态误差,以 标志。对于此处单位斜坡响应时,其稳态误差为
误差响应为
将上式对 求导,的误差响应的峰值时间
将 带入误差响应函数可得最大误差
0.0121
4数学仿真与验证
4.1MATLAB
MATLAB是数学计算领域非常强大的一个软件,在很多领域有着极其重要的作用,比如自动控制领域。在此将借用MATLAB来对系统性能进行分析计算,验证理论结果。
由上式可知,PI控制系统不改变系统自然频率,但可以增大系统阻尼比。因ξ与 均和 有关,所以适当选择开环增益和积分时间常数,既可以减小系统在斜坡输入时的稳态误差,又可以使系统在阶跃输入时有满意的动态性能。
3.2
结合上述分析,当输入是阶跃函数时,本系统输出为:
因 ,对上式进行拉氏反变换,得单位阶跃响应
由上式可以看出,系统为稳态分量 和瞬态分量 组成。系统阶跃时间响应为振荡衰减函数,稳态值趋于1。将阶跃响应对 求导,有峰值时间
图4-1 PI系统单位阶跃响应曲线
当光标移到对应点后,在浮出的文本框中可读出数据,列出如下:
峰值时间:tp=0.047
峰值:
超调量:
条件时间: ( )
4.3
对于系统的单位斜坡输入响应,可以采用同样的方法。
首先在命令框中输入程序如下:
num=[50,5000]
den=[1,50,5000]
sys=tf(num,den)
关键词:PI控制MATLAB
直流电机PI控制器参数设计
1
1.1系统结构如下图
图1-1 直流电机PI控制结构图
系统组成为比例积分环节、比例环节、惯性环节和单位负反馈,在比例环节与惯性环节之间加入扰动信号比较点。其中,比例环节与惯性环节是系统部可变部分。扰动信号输入时也经过一个比例环节。
2数学模型
2.1PI
由设计要求可以得出,
其中e=r-y。故做拉氏变换可得D的表达式:
2.2
令图1中的 输入为零,可以得到方程:
两边同时乘以 可得:
最后进行拉式反变换得:
令图1中的 输入为零,可以得到方程
两边同时乘以 可得:
最后进行拉式反变换得:
2.3
控制系统除了承受输入信号作用外,还经常处于各种扰动下。本系统的扰动信号为电机的负载转矩W。设负载转矩W的拉氏变换为 ,若令输入 则可计算得出扰动的输出即W到Y的输出:
。
把峰值时间带入 得
根据超调量定义,可得
。
令 表示实际响应与稳态输出之间的误差,由 可以得不等式
若取 ,由上式可解出
3.3
当输入为单位斜坡函数时,系统输出为:
因系统阻尼比为 ,属于欠阻尼系统。以下为欠阻尼系统的单位斜坡响应分析。
对上式进行反拉氏变换,得斜坡输入的时间响应
由上式可知系统单位斜坡响应由稳态分量 和瞬态分量
已知系统单位斜坡误差响应为:
反拉氏变换后得
由 形式可知,欲求 ,可求 的阶跃响应。
同样可以利用LTIViewer求取误差函数的峰值、稳态值等。在命令框中输入程序:
MATLAB为各种信号的建模提供了极其方便的表示方法,对于连续时间系统的时域分析的表示也很简单。
对于连续系统多项式模型
MATLAB表示方法为:
分子多项式:
分母多项式:
建立传递函数模型:
此外,可以使用MATLAB中的LTI Viewer求取系统的各项性能指标。
4.2
下面借助LTBiblioteka Viewer计算本PI控制系统单位阶跃响应时的性能指标和追踪性能。
题 目: 直流电机PI控制器参数设计
初始条件:
一直流电机控制系统的方框图如图所示,其中Y为电机转速, 为电枢电压,W为负载转矩。令电枢电压由PI控制定律求取,PI表达式为: ,其中e=r-y。
要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)
(1)写出以va和W为输入的直流电机系统微分方程;