船舶螺旋桨理论(第四章)
船舶螺旋桨知识

转轴方向的前进速度和旋转产生的切线速度合成。在螺旋桨半径r1和r2(r1<r2)两处各取极小一段,讨论桨叶上的气流情况。V—轴向速度;n—螺旋桨转速;φ—气流角,即气流与螺旋桨旋转平面夹角;α—桨叶剖面迎角;β—桨叶角,即桨叶剖面弦线与旋转平面夹角。显而易见β=α+φ。空气流过桨叶各小段时产生气动力,阻力ΔD和升力ΔL,合成后总空气动力为ΔR。ΔR沿飞行方向的分力为拉力ΔT,与旋螺桨旋转方向相反的力ΔP阻止螺旋桨转动。将整个桨叶上各小段的拉力和阻止旋转的力相加,形成该螺旋桨的拉力和阻止螺旋桨转动的力矩。从以上两图还可以看到。必须使螺旋桨各剖面在升阻比较大的迎角工作,才能获得较大的拉力,较小的阻力矩,也就是效率较高。螺旋桨工作时。轴向速度不随半径变化,而切线速度随半径变化。因此在接近桨尖,半径较大处气流角较小,对应桨叶角也应较小。而在接近桨根,半径较小处气流角较大,对应桨叶角也应较大。螺旋桨的桨叶角从桨尖到桨根应按一定规律逐渐加大。所以说螺旋桨是一个扭转了的机翼更为确切。从图中还可以看到,气流角实际上反映前进速度和切线速度的比值。对某个螺旋桨的某个剖面,剖面迎角随该比值变化而变化。迎角变化,拉力和阻力矩也随之变化。用进矩比“J”反映桨尖处气流角,J=V/nD。式中D—螺旋桨直径。理论和试验证明:螺旋桨的拉力(T),克服螺旋桨阻力矩所需的功率(P)和效率(η)可用下列公式计算:T=Ctρn2D4P=Cpρn3D5η=J·Ct/Cp式中:Ct—拉力系数;Cp—功率系数;ρ—空气密度;n—螺旋桨转速;D—螺旋桨直径。其中Ct和Cp取决于螺旋桨的几何参数,对每个螺旋桨其值随J变化。图1—1—21称为螺旋桨的特性曲线,它可通过理论计算或试验获得。特性曲线给出该螺旋桨拉力系数、功率系数和效率随前进比变化关系。是设计选择螺旋桨和计算飞机性能的主要依据之一。从图形和计算公式都可以看到,当前进比较小时,螺旋桨效率很低。对飞行速度较低而发动机转速较高的轻型飞机极为不利。例如:飞行速度为72千米/小时,发动转速为6500转/分时,η≈32%。因此超轻型飞机必须使用减速器,降低螺旋桨的转速,提高进距比,提高螺旋桨的效率。
螺旋桨基础理论ppt课件
2 - 16
病 原 体 侵 入 机体, 消弱机 体防御 机能, 破坏机 体内环 境的相 对稳定 性,且 在一定 部位生 长繁殖 ,引起 不同程 度的病 理生理 过程
螺旋桨水动力性能
由式(3-36)及式(3-37),可得进速系数J与滑脱比s之间的 关系为
作用在桨叶上的力及力矩
式中:rh为桨毅半径. R 为螺旋桨半径。
式(3 一34 )把螺旋桨的推力、转矩与流场及螺旋桨的 几何特征联系起来。因而比动量理论的结果要精密完整得 多。 当螺旋桨以进速vA和转速n 进行工作时,必须吸收主机所 供给的转矩Q 才能发出推力T ,其所作的有用功率为TVA ,而吸收的功率为2ПnQ ,故螺旋桨的效率为
2 -9
病 原 体 侵 入 机体, 消弱机 体防御 机能, 破坏机 体内环 境的相 对稳定 性,且 在一定 部位生 长繁殖 ,引起 不同程 度的病 理生理 过程
作用在桨叶上的力及力矩
根据茹柯夫斯基升力公式,升元体上dr 段产生的升力 将式(3-28)代入式(3-27),并考虑到dD=єdL (є为
此种情况下螺旋桨产生负推力。螺旋桨不遭受旋转阻力时
旋转一周所前进的距离称为无转矩进程或无转矩螺距,并
以P2表示, 对于一定的螺旋桨而言,显然P2> P1> P ,船舶在航行时 ,螺旋桨必须产生向前的推力以克服船之阻力,才能使船
以一定的速度前进,故螺旋桨在实际操作时,其每转一周
前进的距离hp小于实效螺距P1 。实效螺距P1与进程hp之 差(P1-hp)称为实效滑脱,其与实效螺距P1的比值称为 实效2滑- 2脱0 比,以s1来表示,即
叶元体的阻升比),叶元体转矩dQ=rdF , 可得
船舶螺旋桨理论
(cos?
a)
0
?
cos?
a
?
1 sin 2 ?
2
a
? ? ??
?
1 2
sin 2 ?
0 )????
Γ (r0 ) ?
2(1 ? a 2 )
0?sin ?
0 (1 ?
cos?
? 0 )?
?
14
现在有了?
? b
和 ?s
的表达式后,则法向诱导速度的
)
dr0
? ?
t
(
r0
)
K
fn
(r
,
?
;
r0
,
?
0
)d?
0
8
求得 ?f ? 及α后,按式(4-188)有
?s
? fc (r , s) ?
s ? b(r )
2
?fc? ?s
ds
?
(s
?
b(r ))? 2
螺距角按(4-189)式有
? P (r ) ? ? i (r ) ? ? (r )
以上方法不适用于有显著的纵斜或者有大侧 斜的变螺距桨。因此杨德昌在该方法中增加了对 厚度影响的计算,即在式中增加 usn0 一项,则
? RP
?t ? b (r0 ,? 0 )r0d? 0 ?l cos ? P (r0 )
? Γ (r0 )
(2)随边须满足库塔条件。由薄翼理论知道,这个条件
意味着随边处 等于零。即
? b (r0 ,? t ) ? 0
10
为了进行计算,把 ? b (r0 ,? 0 ) 用解析的形式来表达。 卞保琦方法中采用附着涡分布函数的定义与前面所讲的
?? ???
船舶螺旋桨形式ppt课件

叶片裂纹或断裂
由于材料缺陷、超载或交变应力等原 因,导致螺旋桨叶片出现裂纹或断裂 。
螺距误差
由于螺旋桨桨叶的螺距制造误差或运 转时的变形等原因,导致螺旋桨螺距 与设计值不符。
螺旋桨故障的诊断方法
振动分析法
通过分析船舶的振动情况,判断螺旋桨是否 存在故障。
温度检测法
通过检测螺旋桨附近的温度,判断是否存在 过热或异常升温。
创新设计
通过数值模拟和实验研究,探索新型螺旋桨的设计理念和方 法,以适应未来船舶航行需求的变化。
THANKS
感谢观看
螺旋桨的作用
通过旋转螺旋桨,产生向前的推 力,使船舶得以前进、后退或保 持静止状态。
螺旋桨的种类与特点
种类
根据不同的分类标准,螺旋桨可分为 多种类型。如按桨叶数目可分为单桨 和双桨;按推进方式可分为前置推进 、后置推进和侧置推进等。
特点
不同类型的螺旋桨具有不同的特点和 应用场景。例如,单桨适用于中低速 航行的大中型船舶,双桨则适用于高 速航行的小型船舶。
在维修或更换螺旋桨时,需遵循相关安全操作规程,确保人员
和设备安全。
04
船舶螺旋桨的故障诊断与排除
螺旋桨的常见故障及原因分析
振动过大
由于螺旋桨桨叶的安装误差、制造缺 陷或螺旋桨运转时的不平衡等原因, 导致船舶振动过大。
效率下降
由于螺旋桨的表面腐蚀、水生物附着 或泥沙磨损等原因,导致螺旋桨的推 进效率下降。
声音诊断法
通过听螺旋桨运转时的声音,判断是否存在 异常。
压力检测法
通过检测螺旋桨附近的水流压力,判断是否 存在异常。
螺旋桨故障的排除与修复
清洗和修复
更换损坏的叶片
对螺旋桨表面的水生物和泥沙进行清洗, 修复腐蚀和磨损部分。
船舶推进螺旋桨基础理论

船舶推动第二章 螺旋桨几何特征
3、推动器消耗旳功率:
4、理想推动器旳效率:
船舶推动第二章 螺旋桨几何特征
5、理想推动器旳效率旳另一种体现式:
船舶推动第二章 螺旋桨几何特征
6、理想推动器旳效率曲线
载荷系数愈小效率愈高。增大直径D可减小载荷系数,从而提升效率。着一结论具有主要意义
3、当进速再增大到某一数值时,螺旋桨不遭受旋转阻力,其实质乃是升力dL及阻力dD在周向旳分力大小相等方向相反。但在此种情况下螺旋桨产生负推力。
螺旋桨不遭受旋转阻力时旋转一周所迈进旳距离称为无转矩进程或无转矩螺距 。
船舶推动第三章 螺旋桨基础理论
对于一定旳螺旋桨,有:
船舶在航行时,螺旋桨必须产生向前旳推力以克服船舶阻力,才干使船以一定旳速度迈进。所以螺旋桨在实际操作时,其每旋转一周迈进旳距离不大于实效螺距。
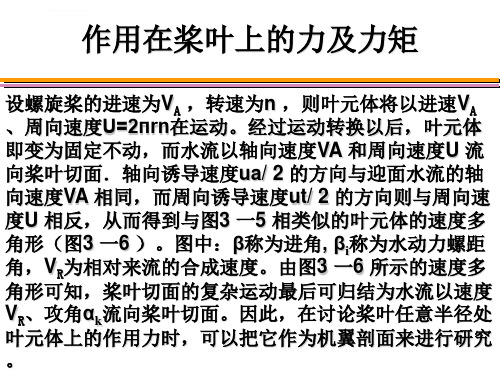
经过运动转换后来,叶元体即变为固定不动,而水流以轴向速度和周向速度流向桨叶切面。
船舶推动第三章 螺旋桨基础理论
结论:浆叶切面旳复杂运动最终可归结为水流以速度 、攻角 流向浆叶切面。
船舶推动第三章 螺旋桨基础理论
二、作用在机翼上旳升力和阻力
船舶推动第三章 螺旋桨基础理论
试验证明,在使用范围内,升力系数与几何攻角约成线性关系。
为几何攻角
为无升力角
为流体动力攻角或绝对攻角
当几何攻角等于零时,升力系数不等于零。这是因为机翼剖面不对称旳缘故。
船舶推动第三章 螺旋桨基础理论
自由涡:翼梢旳横向绕流与来流旳共同用,使机翼后缘形成旋涡层,这些旋涡称为自由涡。
船舶推动第三章 螺旋桨基础理论
因为自由涡旳存在,在空间产生一种诱导速度场。在机冀后缘处,诱导速度垂直于运动方向,故也称下洗速度。
(完整word版)船舶螺旋桨知识
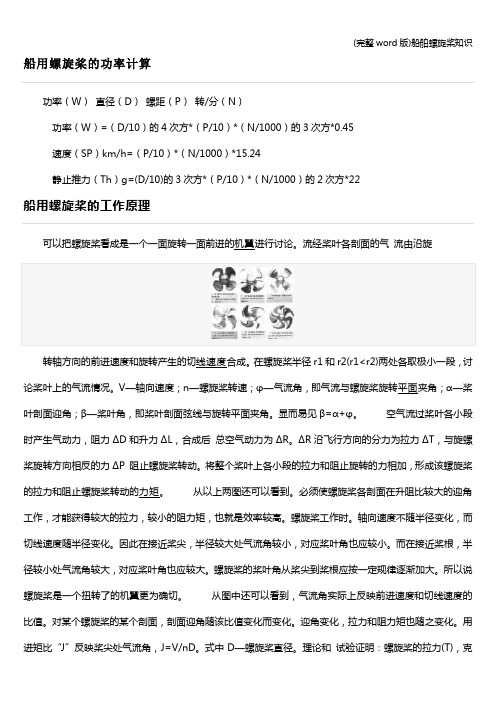
船用螺旋桨的功率计算功率(W)直径(D)螺距(P)转/分(N)功率(W)=(D/10)的4次方*(P/10)*(N/1000)的3次方*0.45速度(SP)km/h=(P/10)*(N/1000)*15.24静止推力(Th)g=(D/10)的3次方*(P/10)*(N/1000)的2次方*22船用螺旋桨的工作原理可以把螺旋桨看成是一个一面旋转一面前进的机翼进行讨论。
流经桨叶各剖面的气流由沿旋转轴方向的前进速度和旋转产生的切线速度合成。
在螺旋桨半径r1和r2(r1<r2)两处各取极小一段,讨论桨叶上的气流情况。
V—轴向速度;n—螺旋桨转速;φ—气流角,即气流与螺旋桨旋转平面夹角;α—桨叶剖面迎角;β—桨叶角,即桨叶剖面弦线与旋转平面夹角。
显而易见β=α+φ。
空气流过桨叶各小段时产生气动力,阻力ΔD和升力ΔL,合成后总空气动力为ΔR。
ΔR沿飞行方向的分力为拉力ΔT,与旋螺桨旋转方向相反的力ΔP 阻止螺旋桨转动。
将整个桨叶上各小段的拉力和阻止旋转的力相加,形成该螺旋桨的拉力和阻止螺旋桨转动的力矩。
从以上两图还可以看到。
必须使螺旋桨各剖面在升阻比较大的迎角工作,才能获得较大的拉力,较小的阻力矩,也就是效率较高。
螺旋桨工作时。
轴向速度不随半径变化,而切线速度随半径变化。
因此在接近桨尖,半径较大处气流角较小,对应桨叶角也应较小。
而在接近桨根,半径较小处气流角较大,对应桨叶角也应较大。
螺旋桨的桨叶角从桨尖到桨根应按一定规律逐渐加大。
所以说螺旋桨是一个扭转了的机翼更为确切。
从图中还可以看到,气流角实际上反映前进速度和切线速度的比值。
对某个螺旋桨的某个剖面,剖面迎角随该比值变化而变化。
迎角变化,拉力和阻力矩也随之变化。
用进矩比“J”反映桨尖处气流角,J=V/nD。
式中D—螺旋桨直径。
理论和试验证明:螺旋桨的拉力(T),克服螺旋桨阻力矩所需的功率(P)和效率(η)可用下列公式计算:T=Ctρn2D4 P=Cpρn3D5η=J·Ct/Cp 式中:Ct Cp—功率系数;ρ—空气密度;n—螺旋桨转速;D—螺旋桨直径。
《船舶推进学》--chapter4--螺旋桨型的敞水试验 - 给学生

44 13 March 2015
43
13 March 2015
4-4 螺旋桨模型系列试验及特性曲线组
4-4 螺旋桨模型系列试验及特性曲线组
4、后果
(1)模型桨进流速度太高,试验难以满足 (2)模型桨转速太高,试验难以实现 怎么办? (3)模型桨推力过大,难以测量,强度难以保证
尺度效应 scale effect
模型桨与实桨因雷诺数不同引起的水动力性能差异
16 13 March 2015
15
13 March 2015
4-2 临界雷诺数和尺度效应
C D C Dm C Ds
5 t 0.044 ) C Dm 2(1 2 )( 1 / 6 b Re Re 2 / 3
t b 2.5 C Ds 2(1 2 )(1.89 1.62 log ) b KP
23
K P 30 10 6 m
实桨粗糙度
13 March 2015 24 13 March 2015
尺度效应
模型桨与实桨因雷诺数不同引起的水动力性能差异
20
13 March 2015
4-2 临界雷诺数和尺ห้องสมุดไป่ตู้效应
4-2 临界雷诺数和尺度效应
二、尺度效应及修正方法
(1)不修正
为什么?
桨模光滑,实桨粗糙,抵消尺度效应 (2)只修正 K Q
K Qm K Qs ( Re m 2.58 ) Re s
(3) m S
4
4-3 敞水试验及测试数据表达
4-2螺旋桨的工作原理

121【上一节】【下一节】【返回主页】§4-2 螺旋桨的工作原理动量理论:环流理论:一、动量理论1.理想推进器理论鼓动盘:图4-2-1 流管内水流流动图形伯努里定理:122鼓动盘前:21120)(2121a A A u V p V p ++=+ρρ鼓动盘后:21120)(21)(21a A a A u V p u V p ++'=++ρρ由上两式相减,得:])[(212211A a A V u V p p -+=-'ρ 鼓动盘前后压力差即形成推力:)(110p p A T -'=将式(4-2-3)代入上式,得:002)21(]2[21A u u V A u u V T a a A a a A +=+=ρρ根据动量定理,推力等于动量的变化率,可得:a A a A mu V u V m T =-+=])[(式中:01)(A u V m a A +=ρ将此关系式代入a mu T =后,得:a a A u A u V T 01)(+=ρ123aa u u 211=。
理想推进器的效率:Aaa A A a A A i V u Tu TV TV mu TV TV 211121212+=+=+=η推进器的载荷系数:221/A V T C A T ρ=Ti C ++=112η2. 理想螺旋桨理论124 图4-2-2 尾流扭转现象单位时间内流过此圆环的流体质量:)21(0a A u V dA dm +=ρ图4-2-3 理想螺旋桨运动模型桨盘紧前方的动量矩:0='L桨盘紧后方的动量矩:t u dmr L '=''单位时间内动量矩的增量:t u dmr L L '='-''根据动量矩定理:流体在单位时间内流经流管两截面的动量矩增量等于作用在流管上的力矩。
在我们所讨论的情形下,是指对螺旋桨轴线所取的力矩。
即:125dQ L L ='-''作用在流体上的力矩:rdF dQ = t u dm dF '=t t u u ='根据动能定理可知,质量为dm 的流体在旋转运动时动能的改变应等于旋转力dF 在单位时间内所作的功,即:221tt udmdFu =tt u u 211=能量守恒:222121ta A dmu dmu dTV rdF ++=ω126 22aA tta u V u r u u +-=ω结论:诱导速度n u 垂直于合速R V 。
第4章 螺旋桨模型的敞水试验
第四章螺旋桨模型的敞水试验螺旋桨模型单独地在均匀水流中的试验称为敞水试验,试验可以在船模试验池、循环水槽或空泡水筒中进行。
它是检验和分析螺旋桨性能较为简便的方法。
螺旋桨模型试验对于研究它的水动力性能有重要的作用,除为螺旋桨设计提供丰富的资料外,对理论的发展也提供可靠的基础。
螺旋桨模型敞水试验的目的及其作用大致是:①进行系列试验,将所得结果分析整理后绘制成专门图谱,供设计使用。
现时各类螺旋桨的设计图谱都是根据系列试验结果绘制而成的。
②根据系列试验的结果,可以系统地分析螺旋桨各种几何要素对性能的影响,以供设计时正确选择各种参数,并为改善螺旋桨性能指出方向。
③校核和验证理论方法必不可少的手段。
④为配合自航试验而进行同一螺旋桨模型的敞水试验,以分析推进效率成分,比较各种设计方案的优劣,便于选择最佳的螺旋桨。
螺旋桨模型试验的重要性如上所述,但模型和实际螺旋桨形状相似而大小不同,应该在怎样的条件下才能将模型试验的结果应用于实际螺旋桨,这是首先需要解决的问题。
为此,我们在下面将分别研究螺旋桨的相似理论以及尺度作用的影响。
§4-1 敞水试验的相似条件从“流体力学”及“船舶阻力”课程中已知,在流体中运动的模型与实物要达到力学上的全相似,必须满足几何相似、运动相似及动力相似。
研究螺旋桨相似理论的方法甚多,所得到的结果基本上是一致的。
下面将用量纲分析法进行讨论,也就是用因次分析法则求出螺旋桨作用力的大致规律,然后研究所得公式中各项的物理意义。
可以设想,一定几何形状的螺旋桨在敞水中运转时产生的水动力(推力或转矩)与直径D(代表螺旋桨的大小)、转速n、进速VA、水的密度ρ、水的运动粘性系数ν及重力加速度g有关。
换言之,我们可用下列函数来表示推力T和各因素之间的关系,即T = f1(D,n,V A,ρ,ν,g),为了便于用因次分析法确定此函数的性质,将上式写作:T = k D a n b cAVρd νe g f(4-1)式中k为比例常数,a、b、c、d、e、f均为未知指数。
船舶螺旋桨理论(第四章)
水动力螺距角i 作为参考面螺距角的一次近似。
在桨叶片区域内,把参考面用网格进行划分,如
图所示。网格的径向间距为r ,从毂径RH到叶梢RP
划分为M个区间,即
r RP RH
M
在叶梢和叶根的两个区间,各再加划一个半区 间和1/4区间。故参考面上弦向的条带共有M+4个。 然后根据计算经验,对扇叶进行网格划分,大致情 况如图所示。
的长度为l ,则 m ,k 应满足下式 m,kl lcorm ss( rm)
取: W QT
ft s
VR
ft s
VR
tm,k1 tmk
rm coss (rm)
其中VR为升力线理论计算所得的、在rm处的剖面进流速度,而
tm ,k1ft(rm, k1)
tm,k ft(rm,k)
把 σ 式代入σ m,k 式,最后得
m ,kV R(tm ,k 1tm ,k)
附着涡分布的总环量Γ ( r ) 取自升力线理论计算结果。通过内插可得
出任一 rm 处的 Γ 值。克文采用下式进行内插
G(r)ΓD (r)s
g
Cj sinj ()
j1
r 变量与 的置换关系为
r1 2(1rH)1 2(1rH)co s
现在在展向第m条带内,从导边到随边的所有这些涡段的涡强度总
式中: d0T2(r0)si n0d0
C 0(r0)2A 0(r0)1 2A 1(r0)1
按上一节的公式进行展开,最后化简得
在 00 a区间,涡分布有
b s((rr0 0,, 0 0)) 1 (21a1 a ΓT)((R rr0P 0))Γ(r0)1(cos0)Γ(r0)0 sin0
船螺旋桨原理

船螺旋桨原理
船螺旋桨是船舶主要的推进装置,它利用螺旋桨叶片的旋转来推动水流,产生
推进力,从而推动船舶前进。
螺旋桨的设计原理和工作原理对船舶的性能和效率有着重要的影响。
本文将介绍船螺旋桨的原理和工作原理,以及其在船舶推进中的作用。
螺旋桨的原理是基于牛顿第三定律和流体动力学原理。
当螺旋桨叶片旋转时,
叶片与水流之间会产生相对运动,根据牛顿第三定律,水流会对叶片产生一个反作用力,从而推动船舶前进。
螺旋桨叶片的设计和布局能够影响推进力的大小和方向,进而影响船舶的速度和操纵性能。
螺旋桨的工作原理是将动力源(如发动机)提供的动力转化为推进力。
动力源
通过轴传递动力给螺旋桨,使其旋转,螺旋桨叶片与水流相互作用,产生推进力,推动船舶前进。
螺旋桨的工作效率取决于叶片的设计和布局、转速和水流条件等因素。
螺旋桨在船舶推进中起着至关重要的作用。
其设计和工作原理直接影响船舶的
性能和效率。
合理的螺旋桨设计能够提高船舶的推进效率,减少燃料消耗,提高航行速度,改善操纵性能。
因此,螺旋桨的选择和设计对船舶的性能有着重要的影响。
总之,螺旋桨作为船舶的主要推进装置,其原理和工作原理对船舶的性能和效
率有着重要的影响。
合理的螺旋桨设计能够提高船舶的推进效率,改善航行性能,降低能耗。
因此,深入理解螺旋桨的原理和工作原理对于船舶设计和运营具有重要意义。
航速和航程解析

上节回顾
初显/初隐距离 D0=2.09 e +2.09 h
C位置 B位置 A位置
初显位置
1、强光灯:光力射程≥D5 2、弱光灯:光力射程<D5 3、中版海图图注射程
一、船速、对水航速和实际航速
➢船速:指船舶在无风无流情况下的航行速
度,即船舶在静水中单位时间内的航行距 离。船速是船舶的一个重要性能指标。
• 解:该船对水的相对速度为15+1=16kn,则计程仪航程SL=16×2=32′.0,
所以
• △L= SL-L(2L—2L—1L1)×100%=+6.7%
思考与练习1
甲、乙两地相距10n mile,海区无风有逆流, 流速2kn,某船自甲地到乙地,船速22kn, 分别求相对计程仪与绝对计程仪所指示的航 速和航程。
h≥ V 2/g + d h---- 水深 (m) V---- 船速(m/s) g-----重力加速度( m/s2) d----- 船舶吃水 (m )
船速测定计算:
1、在恒流时,两次测定v1和v2,则v=1/2 ( v1+ v2) 2、在等加速水流影响时,应测三次,求出v1, v2, v3,则
v=1/4( v1+ 2v2 + v3 )
相对计程仪:22kn,11n mile 绝对计程仪:20kn,10n mile
思考与练习2
某船船速15kn,自甲地驶往相距60n mile 的 乙地,出发时计程仪读数113′.0,4h后抵达 乙地时计程仪读数为169′.0,计程仪改正率为 0.试分析该海区的风流情况.
顺流1kn,顶风1kn
课堂小节:
=(理论航程-对水航程)/理论航程× 100% 经变换可得/:对水航程=理论航程 × (1- S ) 假如螺旋桨每小时转数为N,航行时间T小时,则上式变为:
船舶螺旋桨原理
船舶螺旋桨原理
船舶螺旋桨是船舶推进系统中的关键组件,其原理基于流体动力学和牛顿第三定律。
船舶螺旋桨的核心原理是通过旋转产生的离散被称为螺旋线的叶片,将水流动能转化为推力。
具体而言,当船舶螺旋桨旋转时,叶片会在传动力的作用下以螺旋形状切割水流,将水流动能转变为受力的水动力。
根据牛顿第三定律,当螺旋桨将水推向后方时,水会以相等且相反的力推回螺旋桨。
这种相互作用力的平衡使得船舶螺旋桨能够产生推力,并推动船舶前进。
船舶螺旋桨的效率与多个因素相关。
其中,螺旋桨的叶片形状、叶片的角度和叶片的数量是决定螺旋桨效率的重要因素。
叶片的形状和角度会影响水流的切割和受力情况,从而影响推力的大小和方向。
同时,螺旋桨的数量也会影响推进效率,多个螺旋桨可以提高推力和机动性。
此外,船舶螺旋桨的旋转速度也会影响推进效果。
过高或过低的旋转速度都会降低螺旋桨的效率,因此需要根据船舶的实际情况调整旋转速度。
总的来说,船舶螺旋桨原理是利用螺旋形状切割水流,将水动能转化为推力的过程。
根据牛顿第三定律,推力的同时也会产生反作用力,使得船舶得以前进。
螺旋桨的叶片形状、角度、数量和旋转速度等因素都会影响螺旋桨的效率和推进功率。
船舶推进_螺旋桨基础理论

2
上两式相减:
p p 1 ( V A 12 u a ) u a
' 1
得出推力Ti的另一种表达形式为:
T i ( p p 1 ) A 0 A 0 ( V A 12 u a ) u a
' 1
17
3.1 理想推进器理论
T i m u a A 0 (V A u a 1 ) u a
③ 水为不可压缩的理想流体。 根据这些假定而得到的推进器理论,称为理想推进器 理论,适于螺旋桨、明轮、喷水推进器等。
7
3.1 理想推进器理论
理想推进器力学模型
远前方 盘面 远后方
诱导速度 离盘面愈近, 由于推进器的抽吸 作用, 水流的速度愈大而压力下 降; 水流流过盘面后压力突增。
3.2 理想螺旋桨理论
根据动量矩定理:流体在单位时间内流经流管两截 面的动量矩增量等于作用在流管上的力矩。
L '' L ' d Q
作用在流体上的力矩:
d Q rd F i
其中,作用在流体上的旋转力
d Fi d m u
' t
u t' u t
桨盘紧后方的周 向诱导速度。 桨盘远后方的周 向诱导速度。
12
伯努利方程
v2 p z H 2g g
适用条件:只受到重力的不可压缩 的理想流体,定常流动。
13
物理意义
v2 p z H 2g g
单 位 重 力流体的 动能
位势能
压强势能
沿着同一根流线,流体的动能、位势能和 压强势能可以相互转变,三者之和保持不 变。
14
几何意义
螺旋桨基础理论分解课件
螺旋桨的相似参数包括桨叶角、螺距比、转速、雷诺数等,这些参 数在相似理论中起着重要作用。
相似定理
根据相似理论,可以通过改变螺旋桨的相似参数来研究其性能变化规 律,从而实现对实尺度螺旋桨性能的预测。
螺旋桨的尺度效应及其影响
定义及内涵
螺旋桨的尺度效应是指螺旋桨的性能随其尺寸变化而变化的现象。当螺旋桨的尺寸增大或 减小时,其周围的流场、湍流度、粘性等也会发生变化,从而影响螺旋桨的性能。
01
采用主动流动控制技术,如涡流 发生器、射流控制等,对螺旋桨 叶尖涡进行主动干预,提高螺旋 桨失速性能。
02
通过以上改进措施,可以有效提 高螺旋桨的空化和失速性能,保 证螺旋桨在各种工况下的稳定工作。
05
螺旋桨的相似理论与尺度效应
螺旋桨的相似理论
相似定 义
螺旋桨的相似理论基于流体力学的相似原理,即两个螺旋桨在几何 形状、运动状态、动力特性等方面完全相似,则它们的性能也将相 似。
• 试验设计与执行:在进行螺旋桨模型试验时,需要选择合适的模型尺寸、试验 设备等,并精确控制试验条件,以获得准确的试验数据。
• 数据处理与误差分析:对试验数据进行处理时,需要考虑各种误差来源,如测 量误差、环境干扰等,并采取合适的误差分析方法,以提高数据的可靠性。
• 换算方法与公式:为了实现螺旋桨模型试验数据与实尺度性能的换算,可以采 用相似的换算公式或方法。这些方法通常基于相似理论和尺度效应的研究成果, 通过调整相关参数来实现换算。换算过程中需要注意单位统一和适用范围。
形状优化
通过参数化建模和CFD评 估,可以对螺旋桨的叶型、 弦长、扭角等参数进行优 化,以寻求最佳性能。
控制策略优化
考虑螺旋桨与飞行器的相 互作用,CFD可用于优化 控制策略,如变速、变距等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
m , k 的点Pm,k ,它的x坐标以xm,k 表示,则
xm,k Z R ( m ) m k tg s ( m )
2018/6/9
以单位面积计算的源强密度
按(4-70)式求得。设线段 P
m,k Pm1,k
的长度为 l ,则 m,k 应满足下式
rm m,k l l cos s (rm )
或:
0 l (r0 )
其中
T (r0 )
2
(1 cos 0 )
T (r0 ) t (r0 ) l (r0 )
2018/6/9
故导边的 0 始终为零,随边的 0 始终为 π,即
0 0 0
0 l (r0 ) 0 t (r0 )
然后用展开式
Γ (r0 ) 0 M (r0 , 0 ) C0 (r0 ) A0 (r0 ) ctg An (r0 ) sin(n 0 ) T (r0 ) 2 n1
b
式中:
d 0
T (r0 )
2
sin 0 d 0
1 C0 (r0 ) A0 (r0 ) A1 (r0 ) 1 2 2
b (r0 , t ) 0
2018/6/9
为了进行计算,把 b (r0 , 0 ) 用解析的形式来表达。 卞保琦方法中采用附着涡分布函数的定义与前面所讲的
略有不同,这里用 来表示。它与前面讲的 之间的关系
为:
b (r0 , 0 )
b (r0 , 0 )r0 RP cos P (r0 )
的分布形式是等螺距的情况下,才是严格成立的。
2018/6/9
在上述条件下,把随边后的尾涡区用A2表示,按(4-122)式进
行积分,随边后的自由涡系所产生的诱导速度。
如要计算在叶面区内控制点 P( x, r, ) 处的诱导速度,以u f 2、u f 3 和 u A2 A3分别表示由A2区、A3区和(A2+A3)区的自由涡系在P点产 生的诱导速度,则有
弦向以间隔为 的幅平面进行分割,称各幅平面与参考面的交
max 为随边处的最大角坐标值。 其中 min 为导边处的最小角坐标值,
K K L KT 1
附着涡和源汇集中分布在这些展向格子线上。
1 K L K K T
2018/6/9
现在来看弦向第k个格子,展向第m个格子的情况,参见下图对网 格交点 r
2018/6/9
现在有了 b 和 s 的表达式后,则法向诱导速度的
有关积分运算均可进行。
随着现代计算机的运算速度和容量的大幅提高,可 以不采用上述避免无限积分的技巧。但该方法中其他部
分仍可采用。可采用该方法中对 b 和 s 的表达式,算
出u f 1n、u f 2n 和 u bn ,再按厚度分布所对应的源汇分布
1 ) 4
n 1
Z
m 1
m
(
设控制点的坐标为( xij , ri , j ) ,在1号叶片上 Pm,k Pm1,k 线段上负荷点
1 )dl Rn
( x0 , , k ),则上式中的Rn为 的坐标为
Rn ( xij x0 ) 2 ri2 2 2ri cos( k n j )
m,k
k b ( rm , )rm d 2 k cos s (rm )
2
上式的物理意义是,在 k 一条涡段上。
k 的 区间内的附着涡,集中到 2
如果展向线段 Pm,k Pm1,k 上的源强密度为单位值,则对应的诱 导速度为
us
sa (u m ,k sr , um ,k s , um ,k
2018/6/9
按(4-187)式,并考虑到α很小,故
1 b (2r ) (r ) arctg b ( r ) (u bn u f 1n u f 3n ) ds b( r ) 2 1 2 (u bn u f 1n u f 3n ) ds b (r ) b( r ) 2
在 a 0 区间
1 cos 0 Γ (r0 ) ( r , ) b 0 0 1 a 2 T (r0 ) 1 Γ (r0 ) 1 1 2 2 a (cos cos sin a s (r0 , 0 ) 0 a R 1 a 2 ( 1 a ) 2 P Γ (r0 ) 1 sin 2 0 ) sin ( 1 cos ) 0 0 0 2 2 2 ( 1 a )
故:
b 的物理意义是把附着涡在单位圆周角内的涡强度作
Γ (r0 )
t b (r0 , 0 )d 0 l
为密度。
2018/6/9
为了便于解析表达及数值计算,陈美生的计算方法把
角坐标 0 作如下变换,引入变量 0 ,令
2 0 l (r0 ) 0 arccos1 T (r0 )
上述各式中的
b(r )
u bn 和u f 1n 可按前述有关公式进行计算。
1
则可
从(4-127)式不难理解有
1 u f 3n (r , ) RP
t ( r0 ) dΓ (r0 ) rH dr0 dr0 K fn (r , ; r0 , 0 )d 0
2018/6/9
求得
f s
及α后,按式(4-188)有
s
f c b( r ) f c (r , s ) b ( r ) ds ( s ) 2 2 s
螺距角按(4-189)式有
P ( r ) i (r ) (r )
以上方法不适用于有显著的纵斜或者有大侧
斜的变螺距桨。因此杨德昌在该方法中增加了对
2018/6/9
线称为展向线。从参考面上 =0 的展向线,向导边方向共分有KL格, 向随边方向共有KT格,使 K min L 4 K T max 4 弦向共有K个展向的格子线 格子线的坐标为 1 , 2 , k K ,其中
g
C j sin( j )
j 1
变量 与
r 的置换关系为
r
1 1 (1 rH ) (1 rH ) cos 2 2
现在在展向第m条带内,从导边到随边的所有这些涡段的涡强度 总和应等于 Γ (rm ) 。
2018/6/9
设附着涡弦向的连续分布密度为 b (r , ) ,则 m,k 应满足
w0n un ubn u f 1n u f 3n
由于参考面假设为无纵斜,并为等螺距,故 g N 0,Q 1 ,
这样按(4-184)式有
f c 1 (u f 1n u f 2 n u bn w0 n ) s WT 1 1 (un w0 n ) (u bn u f 1n u f 3n ) WT WT 1 (u bn u f 1n u f 3n ) W
上海海事大学 2018.6.6
2018/6/9
船舶螺旋桨升力面理论
4-7 连续涡分布的升力面理论设计方法
4-8 离散化涡分布的升力面理论设计方法
4-9 用偶级子分布解螺旋桨升力面的水动力计算问题
2018/6/9
这种方法由卞保琦 1961年提出,是最早利用升力面理论计算 出螺旋桨的拱弧面形状的,其特点是利用升力线理论中的计算结
厚度影响的计算,即在式中增加 u sn0 一项,则
2018/6/9
f c 1 (u bn u fn1 u fn3 u sn 0 ) s W
1 (r ) b ( r ) (ubn u fn1 u fn3 u sn 0 )ds b(r ) 2
b( r )
T 取: Q
W
t m, k 1 t mk f t f t VR VR rm s s cos s (rm )
其中VR为升力线理论计算所得的、在rm处的剖面进流速度,而
t m,k 1 f t (rm , k 1 )
2018/6/9
最后通过计算,可以得出不同方向的诱导速度分量:
sa u m , k ( ri , j ) s u m , k ( ri , j ) sr u m , k ( ri , j )
t m,k f t (rm , k )
2018/6/9
把 σ 式代入σ m,k 式,最后得
m,k VR (t m,k 1 t m,k )
附着涡分布的总环量Γ (r ) 取自升力线理论计算结果。通过内插可得 出任一 rm 处的 Γ 值。克文采用下式进行内插
Γ (r ) G (r ) D s
2018/6/9
在桨叶片区域内,把参考面用网格进行划分,如
图所示。网格的径向间距为r ,从毂径RH到叶梢
RP划分为M个区间,即
RP RH r M
在叶梢和叶根的两个区间,各再加划一个半区
间和1/4区间。故参考面上弦向的条带共有M+4个。
然后根据计算经验,对扇叶进行网格划分,大致情 况如图所示。
果,来避免尾涡诱导速度计算中的无穷限积分,使计算工作量大
大减少,并且,附着涡的弦向分布可任意选取,最后计算出整个 拱弧线的形状及它的攻角,具有更大的灵活性。后人进一步完善
了数值处理方法。
2018/6/9
方法中,
及
取自升力线理论的计算结果,并用
作为参
考面和尾涡面的螺距角。在计算尾涡诱导速度的影响时,利用升力 线理论中的结果来避免无穷限积分的计算,因而,只有在无纵斜