研控科技AS1交流伺服驱动器用户手册
交流伺服某电机驱动器使用说明书.
交流伺服电机驱动器使用说明书1.特点●16位CPU+32位DSP三环(位置、速度、电流)全数字化控制●脉冲序列、速度、转矩多种指令及其组合控制●转速、转矩实时动态显示●完善的自诊断保护功能,免维护型产品●交流同步全封闭伺服电机适应各种恶劣环境●体积小、重量轻2.指标●输入电源三相200V -10%~+15% 50/60HZ●控制方法IGBT PWM(正弦波)●反馈增量式编码器(2500P/r)●控制输入伺服-ON 报警清除CW、CCW驱动、静止●指令输入输入电压±10V●控制电源DC12~24V 最大200mA●保护功能OU LU OS OL OH REG OC STCPU错误,DSP错误,系统错误●通讯RS232C●频率特性200Hz或更高(Jm=Jc时)●体积L250 ×W85 ×H205●重量 3.8Kg3.原理见米纳斯驱动器方框图(图1)和控制方框图(图2)4.接线4.1主回路卸下盖板坚固螺丝;取下端子盖板。
用足够线经和连接器尺寸作连接,导线应采用额定温度600C以上的铜体线,装上端子盖板,拧紧盖板螺丝。
螺丝拧紧力矩大于1.2Nm M4或2.0 Nm M5时才可能损坏端子,接地线径为2.0mm2具体见接线图34.2 CN SIG 连接器[具体见接线图4●驱动器和电机之间的电缆长度最大20M●这些线至少要离开主电路接线30cm,不要让这些线与电源进线走一线槽;或让它们捆扎在一起●线经0.18mm2或以上屏蔽双绞线,有足够的耐弯曲力●屏蔽驱动器侧的屏蔽应连接到CN.SIG 连接器的20脚,电机侧应连接到J 脚●若电缆长于10M,则编码器电源线+5V、0V应接双线4.3 CN I/F 连接●控制器等周边设备与驱动器之间距离最大为3M●这些线至少和主电路接线相隔30cm ,不要让这些线与电源进线走同一线槽或和它们捆扎在一起●COM+和COM-之间的控制电源(V DC)由用户供给●控制信号输出端子可以接受最大24V或50mA;不要施加超过此限位的电压和电流●若用控制信号直接使继电器动作要象左图所示那样,并联一只二极管到继电器。
SYNTEC参数说明手册
SYNTEC参数说明手册- 0 -新代科技参数设定说明手册by : 新代科技date : 2006/11/20ver : 9.5SYNTEC参数说明手册- 1 -版本更新记录项次更改内容纪录更改日期作者更改后版本01 初版定稿2005/05/25 吴达钦V9.002 增加Embedded参数设定,Pr221~P226轴型态修正2005/09/22 赖春亿V9.103 增加伺服轴设定及加减速设定参数说明2005/09/22 赖春亿V9.204 增加六轴卡(servo6)指拨开关说明2006/07/21 赖春亿V9.305 修正内容编排格式2006/09/05 赖春亿V9.406 增加参数总表2006/11/20 赖春亿V9.5SYNTEC参数说明手册- 2 -目录1.参数总表............................................................................................................................................ (7)2.参数设定说明............................................................................................................................................ .. (36)2.1系统基本参数设定............................................................................................................................................ (36)2.1.1硬体环境设定............................................................................................................................................ .. (36)2.1.1.1轴卡基本参数设定............................................................................................................................................ . (36)2.1.1.1.1 Pr01 轴板基址............................................................................................................................................ .. (36)2.1.1.1.2 Pr09 轴板型态............................................................................................................................................ .. (37)2.1.1.1.3 Pr10 伺服警报接点型态............................................................................................................................................ . (37)2.1.1.1.4 Pr11 轴卡时脉来源............................................................................................................................................ (38)2.1.1.1.5 Pr12 SERVO6轴卡最高时脉............................................................................................................................................ (38)2.1.1.1.6 Pr13 轴卡数目............................................................................................................................................ .. (38)2.1.1.2 I/O卡基本参数设定............................................................................................................................................ . (39)2.1.1.2.1 Pr03 I/O板基址............................................................................................................................................ . (39)2.1.1.2.2 Pr05 I/O板组态............................................................................................................................................ . (39)2.1.1.2.3 Pr15 I/O卡数位滤波程度............................................................................................................................................ (42)2.1.1.3 控制精度设定............................................................................................................................................ .. (43)2.1.1.3.1 Pr17控制精度............................................................................................................................................ (43)2.1.1.4 萤幕功能键型态设定............................................................................................................................................ .. 432.1.1.4.1 Pr3205功能键型态............................................................................................................................................ .. (43)2.1.1.5 萤幕型别............................................................................................................................................ . (44)2.1.1.5.1 Pr3211 萤幕型别............................................................................................................................................ .. (44)2.1.1.6预设外部存取资料磁碟机代号 (44)2.1.1.6.1 Pr3213 磁碟机代号............................................................................................................................................ .. (44)2.1.1.7 选择控制面板键盘型态..........................................................................................................................................442.1.1.7.1 Pr3217 选择控制面板键盘型别............................................................................................................................................442.1.1.8系统扫瞄时间设定............................................................................................................................................ . (45)2.1.1.8.1 Pr3202 I/O扫描时间............................................................................................................................................ (45)2.1.1.8.2 Pr3203 运动补间时间............................................................................................................................................ . (45)2.1.1.8.3 Pr3204 PLC扫描时间............................................................................................................................................ .. (45)2.1.2软体介面环境参数设定............................................................................................................................................ . (46)2.1.2.1应用功能参数设定............................................................................................................................................ . (46)2.1.2.1.1 Pr411 G00运动方式............................................................................................................................................ . (46)2.1.2.1.2 Pr413 G92(G92.1)座标保留模式设定 (46)2.1.2.1.3 Pr414 工件座标系统保留模式............................................................................................................................................46SYNTEC参数说明手册- 3 -2.1.2.1.4 Pr415 重置或关机时保留目前刀长资料 (47)2.1.2.1.5 Pr3207 C/S界面版本编号............................................................................................................................................ . (47)2.1.2.1.6 Pr3215选刀时呼叫副程式............................................................................................................................................ (47)2.1.2.1.7 Pr3241 工件程式小数点型态............................................................................................................................................2.1.2.1.8 Pr3243 键盘重置键由PLC处理...........................................................................................................................................482.1.2.1.9 Pr3245刀长磨耗补偿输入增量最大值 (48)2.1.2.1.10 Pr3801 G95时进给量与主轴位置紧密偶合 (48)2.1.2.1.11 Pr3807圆弧终点不在圆弧上检查视窗 (49)2.1.2.1.12 Pr3809 UVW为XYZ轴增量指令 (49)2.1.2.1.13 Pr3815 刀具半径补偿预看模式..........................................................................................................................................492.1.2.1.14 Pr3816 刀长补偿模式............................................................................................................................................ (49)2.1.2.1.15 Pr3819过切检查型态............................................................................................................................................ (50)2.1.2.1.16 Pr3851断刀处理程式号码............................................................................................................................................ . (50)2.1.2.2 系统人机介面设定............................................................................................................................................ (51)2.1.2.2.1 Pr3201 设定启动车床规则............................................................................................................................................ .. (51)2.1.2.2.2 Pr3209 语言设定............................................................................................................................................ .. (51)2.1.2.2.3 Pr3219 系统安装组态............................................................................................................................................ . (52)2.1.2.2.4 Pr3221 除错模式............................................................................................................................................ .. (52)2.1.2.2.5 Pr3223启动系统管理功能............................................................................................................................................ (53)2.1.2.2.6 Pr3225 萤幕保护功能延迟时间............................................................................................................................................2.1.2.2.7 Pr3227 萤幕解析度............................................................................................................................................ .. (53)2.1.2.2.8 Pr3229 关闭工件座标系统功能...........................................................................................................................................532.1.2.2.9 Pr3247 速率显示方法............................................................................................................................................ . (54)2.2.伺服轴向参数设定............................................................................................................................................ .. (55)2.2.1各轴对应机械轴设定............................................................................................................................................ .. (55)2.2.1.1 Pr21~Pr40 伺服对应的机械轴 (55)2.2.2 轴向马达运动方向的设定............................................................................................................................................552.2.2.1 Pr41~Pr60 马达运动方向设定 (55)2.2.3 轴向命令与回授解析度设定........................................................................................................................................562.2.3.1 Pr61~Pr80 位置感测器解析度 (56)Pr81~Pr100 轴卡回授倍频............................................................................................................................................ . (56)Pr121~Pr160 螺杆侧齿轮齿数,马达侧齿轮齿数 (56)Pr161~Pr180 螺杆宽度(Pitch)..................................................................................................................................... (56)Pr181~Pr200 伺服系统的位置回路增益 (56)Pr201~Pr220 位置感测器型态.............................................................................................................................................56Pr341~Pr360 位置命令倍率分子.........................................................................................................................................56Pr361~Pr380 位置命令倍率分母.........................................................................................................................................562.2.4 各轴向应用型态设定............................................................................................................................................ .. (58)SYNTEC参数说明手册- 4 -2.2.4.1 Pr221~Pr226轴型态............................................................................................................................................ . (58)2.2.4.2 Pr281~Pr300选择半径轴或直径轴 (59)2.2.5 各轴向显示名称设定............................................................................................................................................ .. (59)2.2.5.1 Pr321~Pr340设定轴的名称 (59)2.2.6 轴向控制模式设定............................................................................................................................................ (60)2.2.6.1 Pr381~Pr400位置伺服控制模式 (60)2.2.7 定位检查功能设定............................................................................................................................................ (60)2.2.7.1 Pr421~Pr440切削时位置检查的视窗范围 (60)2.2.7.2 Pr481~Pr500 快速移动(Rapid Travel, G00)时位置检查的视窗范围 (61)2.2.7.3 Pr561~Pr580 遗失位置检查视窗 (61)2.2.7.4 Pr901~Pr920 零速检查视窗 (61)2.2.8 各轴向左右软体行程极限保护 (61)2.2.8.1 Pr2401~Pr2440 软体第一行程保护的范围 (61)2.2.8.2 Pr2441~Pr2480 软体第二行程保护的范围 (62)2.3.主轴参数设定............................................................................................................................................ . (63)2.3.1主轴对应命令输出埠设定.............................................................................................................................................632.3.1.1 Pr1621~Pr1630 主轴对应的机械轴或逻辑轴 (63)2.3.2 主轴命令参数设定............................................................................................................................................ (63)2.3.2.1 Pr.1631~Pr.1636 主轴零速offset速度 (63)2.3.2.2 Pr.1641~Pr.1646 主轴编码器极性 (63)2.3.2.3 Pr.1651~Pr.1656 主轴马达编码器一转的Pulse 数 (63)2.3.2.4 Pr.1661~Pr.1666 主轴回授倍频 (64)2.3.2.5 Pr.1671~Pr.1676 主轴马达增益 (64)2.3.2.6 Pr.1681~Pr.1692 主轴第一档齿数比 (64)Pr.1901~Pr.1952 主轴第四档齿数比 (64)2.3.2.7 Pr.1711~Pr.1716 主轴是否安装编码器 (65)2.3.3 主轴运动转速设定参数............................................................................................................................................ . (65)2.3.3.1 Pr.1721~Pr.1726 主轴寸动速度 (65)2.3.3.2 Pr.1731~Pr.1736 主轴最低转速 (65)2.3.3.3 Pr.1801~Pr.1806 主轴最高转速 (65)2.3.3.4 Pr.1821~Pr.1826 主轴伺服微分增益 (65)2.3.3.5 Pr.1831~Pr.1836 主轴加减速时间 (66)2.3.3.6 Pr.1851~Pr.1856 主轴重力加速度加减速时间 (66)2.3.4主轴定位设定参数............................................................................................................................................ (66)2.3.4.1 Pr.1741~Pr.1746 主轴定位速度 (66)2.3.4.2 Pr.1741~Pr.1746 主轴定位偏移量 (66)2.3.4.3 Pr.1771~Pr.1776 主轴原点偏移量 (66)2.3.4.4 Pr.1781~Pr.1786 主轴定位最低速度 (67)SYNTEC参数说明手册- 5 -2.3.4.5 Pr.1791~Pr.1796 主轴马达型态 (67)2.3.4.6 Pr.1811~Pr.1816 主轴编码器安装位置 (67)2.3.4.7 Pr.1841~Pr.1846 主轴Y-Delta切换速度 (67)2.4.轴向运动特性设定参数............................................................................................................................................ (69)2.4.1 切削时前加减速运动规划............................................................................................................................................692.4.1.1 Pr401 切削加减速时间........................................................................................................................................69Pr402 重力加速度加减速时间...........................................................................................................................................69Pr405 切削的最高进给速度............................................................................................................................................ (69)Pr541~Pr560 各轴切削的加减速时间 (69)Pr621~Pr640 各轴切削的最高进给速度 (69)Pr641~Pr660 各轴重力加速度加减速时间 (69)2.4.2 切削时后加减速运动规划............................................................................................................................................712.4.2.1 Pr404后加减速切削钟型加减速时间 (71)2.4.3 切削时直线转角自动减速功能 (73)2.4.3.1 Pr406转角参考速度............................................................................................................................................ . (73)2.4.4 切削时圆弧切削运动最高进给速度设定 (74)2.4.4.1 Pr408 半径5mm圆弧切削参考速度 (74)2.4.5 快速移动及JOG时的加减速规划 (75)2.4.5.1 Pr441~Pr460 各轴快速移动(G00)的加减速时间 (75)Pr461~Pr480 各轴快速移动(G00)的最高进给速度 (75)Pr501~Pr520 各轴快速移动(G00)的F0速度 (75)Pr521~Pr540 各轴JOG速度.............................................................................................................................................752.5.寻原点动作设定参数............................................................................................................................................ . (76)2.5.1寻原点方式设定参数............................................................................................................................................ .. (76)2.5.1.1 Pr961~Pr980 各轴寻原点方法 (76)2.5.2 寻原点动作规格与参数设定........................................................................................................................................762.5.2.1 Pr821~Pr840 各轴第一段寻原点速度 (76)Pr841~Pr860 各轴第二段寻原点速度 (76)Pr861~Pr880 各轴寻原点为负方向 (76)2.5.3 原点偏移功能设定参数............................................................................................................................................ . (77)2.5.3.1 Pr881~Pr900 原点的偏移量设定 (77)2.5.4 原点栅格量功能设定参数............................................................................................................................................782.5.4.1 Pr941~Pr960启动寻原点栅格功能 (78)2.6.手轮功能设定参数............................................................................................................................................ (80)2.6.1手轮讯号输入设定参数............................................................................................................................................ . (80)2.6.1.1 Pr2031~Pr2034 手轮对应的机械轴 (80)SYNTEC参数说明手册- 6 -2.6.2手轮讯号解析度设定参数.............................................................................................................................................802.6.2.1 Pr2041~Pr2044 手轮Encoder一转的Pulse 数 (80)Pr2051~Pr2054 手轮回授倍频...........................................................................................................................................802.6.3手轮段数设定参数............................................................................................................................................ (80)2.6.3.1 Pr2001手轮第四段倍率设定 (80)2.6.4手轮模拟功能设定参数............................................................................................................................................ . (81)2.6.4.1 Pr2003手轮模拟对应手轮号码 (81)2.6.5手轮驱动轴向功能设定参数.........................................................................................................................................812.6.5.1 Pr2031~Pr2033手轮对应的座标轴 (81)2.6.5手轮设定参数............................................................................................................................................ .. (81)2.6.5.1 Pr2031~Pr2033手轮对应的座标轴 (81)2.7.机构补偿功能设定参数............................................................................................................................................ (82)2.7.1尖角误差补偿设定参数............................................................................................................................................ . (82)2.7.1.1 Pr1361~Pr1380圆弧尖角正向误差补偿量 (82)Pr1381~Pr1400圆弧尖角误差补偿时间常数 (82)Pr1361~Pr1400圆弧尖角负向误差补偿量 (82)2.8.轴耦合功能设定参数............................................................................................................................................ . (85)2.8.1轴耦合功能设定参数............................................................................................................................................ .. (85)2.8.1.1 Pr1361~Pr1380圆弧尖角正向误差补偿量 (85)Pr1381~Pr1400圆弧尖角误差补偿时间常数 (85)Pr1361~Pr1400圆弧尖角负向误差补偿量 (85)SYNTEC参数说明手册- 7 -1.参数总表编号说明输入范围单位使用详细说明1 *第一轴轴板基址[0,65535] SERVO 4:ㄧ片或两片轴卡,第一片轴卡位置请设定800(320H).三片或四片轴卡,第一片轴卡位置请设定768(300H)SERVO6:请设定768(300H).ㄧ体机(Embedded):请设定512(200H).内定值800 (320H)3 *第一片IO板基址[0,65535] 第一片I/O卡位置设定,内定值512(200H)5 *IO板组态[0,9] 0:2PIO4+1PIO3(R1+HK)1: HK + 3R12: HK + R2 + 2R13: 2R2 + 4R14: HK2 + R2 + 2R15: HK + R2 + 4PIO46:PIO5 (不启动点矩阵扫描功能)7:PIO5(启动点矩阵扫描控制操作面板)9:虚拟IO卡9 *轴板型态[0,9] 0:EMP21:SERVO4+不检查伺服警报2:SVO4+伺服警报接点为常开接点Normal Open ( A 接点)3:SERVO4+伺服警报接点为常闭接点Normal Close ( B 接点)4:EMP45:SERVO69:虚拟轴卡SYNTEC参数说明手册- 8 -编号说明输入范围单位使用详细说明10 *伺服警报接点型态[0,1] 0:常开接点Normal Open (A接点) 1:常闭接点Normal Close(B接点)注:此参数仅对SERVO 6轴卡有效11 *轴板时脉来源[0,2] 设定轴板时脉来源:0时使用轴板自已时脉.1时共用IPC Bus时脉(486).2时共用IPC Bus时脉(586+).13 *轴板数目[0,6] 设定轴板个数15 设定I/O板数位滤波程度[0,3] 数值越大滤波效果越大,但反应灵敏度变弱.数值越小滤波效果越小,但反应灵敏度变快.17 *控制精度(1:条;2:微米;3:次微米)[1,3] 设定控制精度,基本长度单位长度单位, BLU, 此单位不会受公英制输入模式影响.1: 0.01 mm,0.01 deg,0.001 inch;2: 0.001 mm,0.001 deg,0.0001 inch;3: 0.0001 mm,0.0001 deg0.00001 inch;当此值改变时,所有有关BLU的长度单位参数必需重设,同时,刀具资料也必须重设.21~40 *对应的机械轴[0,20] 依配机规划,可指定各轴相对轴卡上的伺服机械轴输出埠编号41~60 马达运动方向反向[0,1] 设定各轴机台实际运动方向, 0:不反向,1:反向61~80 位置感测器解析度(编码器:Pulse/转;光学尺:Pulse/mm)[100,2500000]pulse/revpulse/mm各轴马达ENCODER每转PULSE 数81~100 轴卡回授倍频[1,4] 轴卡ENCODER倍频数设定, 全部设定4101~120 马达的增益[1,8000] RPM/V 马达指令增益亦即1V 的速度指令,相对马达转速是几转(rpm)SYNTEC参数说明手册- 9 -编号说明输入范围单位使用详细说明注:电压控制模式时有效121~160 螺杆侧齿轮齿数马达侧齿轮齿数[1,999999999]齿轮比设定,输入实际马达端的齿数,与螺杆端齿数161~180 螺牙宽度(Pitch) [1,1000000] BLU 螺杆的导程,螺杆每一转前进的牙距181~200 伺服系统的位置回路增益(Loop Gain)[1,3000] 1/sec 系统的刚性设定,增益值设定越大,系统刚性越好,加工精度越佳,但是设定太大,容易引起机台抖动,通常CNC 系统, 编码器场合设定30 ,光学尺场合,设定20201~220 位置感测器型别(0:编码器;1:光学尺;2:无回授)[0,2] 位置检测元件的类别设定(光学尺,编码器或无回授)221~240 轴的型态[0,5] 设定轴的型态(0:线性轴;1-5:旋转轴型态A-E)241~260 *双回授第二位置感测器对应的机械轴[0,20] 设定双回授中第二位置感测器(光学尺)对应轴卡上的机械轴261~280 双回授第二位置感测器解析度(Pulse/mm)[100,2500000]pulse/mm 双回授第二位置感测器解析度.直线轴:每毫米,mm,的脉波数,即A/B相的频率.旋转轴:一圈,360度,的脉波数,即A/B相的频率.281~300 选择半径轴或直径轴[0,1] 设定该轴为直径轴或半径轴:0:为半径轴;1为直径轴,当此参数变动后,该轴的下列参数也必须是直径量:1.原点偏移量2.参考点3.软体行程极限301~320 双回授第二位置感测器回授倍频[1,4] 双回授第二位置感测器卡ENCODER或光学尺倍频数设定,全部设定4321~340 设定轴的名称[00100,10999] 设定轴的名称,前两位数字决定是否显示轴向代号.00=>显示SYNTEC参数说明手册- 10 -编号说明输入范围单位使用详细说明10=>不显示第三码为英文字母代号的选择;其编码如下:X轴=>1;Y轴=>2;Z轴=>3;A轴=>4;B轴=>5;C轴=>6;U轴=>7V轴=>8W轴=>9后两位为下标号码.例如:X2设定值为102,W23设定值为923X设定为100341~360 位置命令倍率分子[1,999999999] 输出位置命令倍率的分子值361~380 位置命令倍率分母[1,999999999] 输出位置命令倍率的分母值381~400 位置伺服控制模式[0,2] 0: CW/CCW位置伺服控制模式.1: 电压位置伺服控制模式.2: A/B Phase位置伺服控制模式.SYNTEC参数说明手册- 11 -编号说明输入范围单位使用详细说明401 切削的加减速时间[0,60000] ms 8.00版(含之前)使用说明:G01,G02,G03,G33的加减速时间设定,此时间设定越大,加减速时间越长,运动越平顺9.00,10.00版使用说明:设定切削的加减速时间(G01/G02/G03/G31).此参数会与参数405切削的最高进给速度,一起用来计算切削时的合成最高加速度,以供切削时加减速依据.建议设定:每1 m/min的切削速度加减速时间10ms,例参数405设定为6000 (6 m/min) 时,此参数就设60(60ms).402 重力加速度加减速时间[0,60000] ms 设定重力加速度加减速时间.这个参数用来限制动程的冲量(Jerk)最大值.(建议Jmax=65333 mm/sec3)9.00版使用说明:Jmax=Pr405*1000000/(Pr401*Pr402*60)(mm/sec3)10.00版使用说明:Jmax=1G*1000/Pr402(mm/sec3)1G=9800 m/sec2404 后加减速时间[0,60000] ms 切削后加减速时间.提供线性后加减速的方式,平滑马达输出指令,以达到加减速的效果,建议值15ms~25ms405 切削的最高进给速度[0,3600000] mm/mindeg/min01. in/min加工(G01/G02/G03/G31/G33)最高速度设定406 设定转角参考速度[6,3600000] mm/mindeg/min01. in/min设定转角参考速度,此参考速度为转角90度时,允许的角隅最高速度值.此速度越大时加工越快,但角隅精度差,此速度越大加工越SYNTEC参数说明手册- 12 -编号说明输入范围单位使用详细说明慢,但角隅精度好.建议值500mm/min.408 设定半径5mm圆弧切削参考速度[6,3600000] mm/mindeg/min01. in/min由於圆弧切削时,伺服落后会造成圆半径内缩,其中,T为伺服系统时间常数;V为切线速度;R为圆半径.因此,我们利用此关系式,在内缩量保持固定与伺服特性固定的条件下,找出任何圆半径的最高允许速度.此参数即在设定此参考半径Rref,参数408用来设定参考速度Vref.建议值Rref = 5000 (5mm), Vref=500 (mm/min).409 螺纹切削加减速时间[0,60000] ms G33螺纹切削加减速时间410 手轮加减速时间[10,60000] ms 设定手轮加减速时间,内定值200 411 G00运动方式[0,1] 0:线性同动;1:各轴独立以各轴最高速移动.413 G92(G92.1)座标保留模式设定[0.,2] 0:重置时(Reset)不保留由G92(G92.1)设定的工作座标偏移量1:重置时(Reset) 保留由G92(G92.1)设定的工作座标偏移量,开关机不保留2: 重置时(Reset)与开关机保留由G92(G92.1)设定的工作座标偏移量414 工作座标系统座标保留模式设定[0,2] 0:重置时(Reset)回归内定工件座标系统(G54)1:重置时(Reset)保留当时工件座标系统2:重置时(Reset)与开关机保留当时工件座标系统415 *在重置(Reset)或关[0,1] 0: 在重置(Reset)或关机(Power SYNTEC参数说明手册- 13 -编号说明输入范围单位使用详细说明机(Power OFF)时目前刀子的刀长资料是否保留OFF)时不保留目前刀子的刀长资料1:在重置(Reset)或关机(PowerOFF)时保留目前刀子的刀长资料417 刚性攻牙速度回路增益[0,4000] 用来调整Z轴追随主轴在等速段的强度,此值越小Z 轴落后主轴越多,此值越大,Z轴落后越小,当此值太大,会造成超前,或摆动现象.418 刚性攻牙加速度回路增益[0,4000] 用来调整Z轴追随主轴在加速段的强度,此值越小Z 轴落后主轴越多,此值越大,Z轴落后越小,当此值太大,会造成超前,或摆动现象419 刚性攻牙主轴减速时间[0,60000] ms 刚性攻牙主轴减速时间,用来调整攻牙过切深度.421~440 切削时位置检查(In-Position)的视窗范围[0,300000] BLU BLOCK 的执行,以确定加工精度,但是设定太小,可能会影响加工速度441~460 快速移动(RapidTravel, G00)加减速时间[0,60000] ms G00,Home 与JOG 的加减速时间设定,建议值: G01 加减速速度一倍以上461~480 快速移动(RapidTravel, G00)进给速度[0,3600000] mm/mindeg/min0.1 in/minG00 的速度设定,此速度接受面板RAPID OVERRIDE 设定(F0,25,50,100)481~500 快速移动(RapidTravel, G00)时位置检查(In-Position)的视窗范围[0,300000] BLU G00 IN POSITION CHECK 的范围501~520 快速移动(RapidTravel, G00) F0速度值[0,15000] mm/mindeg/min0.1 in/minG00 RAPID OVERRIDE 设定为F0 时,机台运动速度521~540 JOG速度[0,3600000] mm/mindeg/min0.1 in/min各轴JOG 速度设定,接受面板旋钮的OVERIRDE541~560 各轴切削加减速时[0,60000] ms 8.00版(含之前)使用说明: SYNTEC参数说明手册- 14 -编号说明输入范围单位使用详细说明间PLC轴G01, G02, G03, G33 的加减速时间设定,此时间设定越大,加减速时间越长,运动越平顺,但是太大会影响到加工精度.9.00,10.00版使用说明:设定切削的加减速时间(G01/G02/G03/G31).此参数会与参数621~640各轴切削的最高进给速度,一起用来计算切削时的合成最高加速度,以供切削时加减速依据.建议设定每1 m/min的切削速度加减速时间10ms,例参数621设定为6000 (6 m/min) 时,此参数541就设60(60ms).561~580 遗失位置检查视窗[50,300000] BLU 控制器在马达静止的情况下,会自动检查马达回授位置与命令差是否超过此参数设定的范围,如果是就会发出遗失位置命令警报581~600 速度前馈补偿百分比[0,200]601~620 各轴转角参考速度[6,3600000] mm/mindeg/min01. in/min设定各轴转角参考速度,此参考速度为转角90度时,允许的角隅最高速度值.此速度越大时加工越快,但角隅精度差,此速度越大加工越慢,但角隅精度好.建议值500 mm/min.621~640 各轴切削的最高进给速度[0,3600000] mm/mindeg/min01. in/min加工(G01,G02,G03)最高速度设定641~660 各轴重力加速度加减速时间[0,60000] ms 设定各轴重力加速度加减速时间.这个参数用来限制动程的冲量(Jerk)最大值.Jmax=1G*1000/T1G=9.8 m/sec2T为此参数所设定的值PS:此参数对G00,G01,JOG,Home的轴向移动均有效SYNTEC参数说明手册- 15 -编号说明输入范围单位使用详细说明701~720 所属轴群代号[1,15] 本轴附属轴群.有关轴群的PLC 控制介面,请参考R520~R559.Bit 0 此轴属第一轴群Bit 1 此轴属第二轴群Bit 2 此轴属第三轴群Bit 3 此轴属第四轴群例如:设定1此轴属第一轴群;设定2此轴属第二轴群;设定3此轴属第一轴群,也属於第二轴群;设定15此轴属第一至四轴群.721~724 轴群对应的MST通道[1,4] 设定轴群使用的MST通道代号.目前系统提供多组独立的MST通道可进行CNC与PLC沟通.不同轴群可共用同一个通道,当使用共用通道,如发生同时来自不同轴群的MST要求时,其要求将依序通知PLC处理,会稍微影响效能,但PLC程式撰写较简单.第一组的PLC介面由C38/S30/S29/S54/S69 R1~R3构成第二~四组的PLC介面请参考R615~R626731 CNC主系统轴群[1,4] 指定CNC主系统包含的轴群数目.超过此参数的轴群,可由PLC直接驱动.有关轴群的PLC控制介面,请参考R520~R559.内定值2.例:设为2时:表示第一和第二轴群由CNC主系统控制($1,$2),第三和第四轴群由PLC控制.设为3时:表示第一,二,和第三轴群由CNCSYNTEC参数说明手册- 16 -编号说明输入范围单位使用详细说明主系统控制($1,$2,$3),第四轴群由PLC控制.~800 系统保留区保留803 *Home Dog来源(0:I/O; 1:轴卡)[0,1] HOME DOG 是由I/O 卡来,还是轴卡,建议由I/O 卡来注:此参数仅对EMP4卡有效821~840 寻原点速度[0,3600000] mm/min deg/min0.1 in/min寻原点时,轴向寻找HomeDOG的速度设定,试机时,先设定1mm/min ,没有问题后,再将速度调高到目标值841~860 寻原点的第二段的低速速度[0,3600000] mm/mindeg/min01 in/min轴向在找到HomeDOG后往回寻找马达INDEX的速度设定,试机时,先设定1 mm/min ,没有问题后,再将速度调高到目标值861~880 寻原点方向为负方向[0,1] 寻HOME 方向设定,0 为正, 1为负881~900 寻原点的偏移量[-999999999,+999999999]BLU 系统在找到马达INDEX后,会将机械座标零点从马达INDEX位置偏移到参数指定距离的位置上,这个参数通常用於将机台座标设定为单向范围901~920 零速检查视窗(count)[3,50] count 各轴零速检查视窗,当0.1sec内绝对位置纪录器变化量小於设定值时被视为零速度921~940 Home Dog极性(0:正;1:负)[0,1] HOME DOG 极性设定,正常配线是NORMAL CLOSE ,但是在进接开关使用场合是NORMALOPEN注:此参数仅对EMP4卡有效941~960 启动寻原点栅格功能[0,1] 当Home Dog位置太靠近马达索引讯号时,容易因HomeDog反应异常造成寻原点不准.当装好HomeDog后发现栅格量不为20~80,请打开此功能.此功能打开后,寻原点时会自动忽略离开HomeDog后半圈的索引讯号.SYNTEC参数说明手册- 17 -编号说明输入范围单位使用详细说明961~980 设X 轴寻原点方法[0,2] 0:有DOG开关;1:编码器索引2.有DOG开关,对原点偏移量的处理,采直接设定机械座标方式,而非位移.~1200 系统保留保留1221~1240 启动背隙补偿功能[0,1] 背隙补偿功能起动,关闭,进行背隙量测时,需将此功能先关掉1241~1260 背隙补偿量[0,999999999]BLU 背隙补偿功能起动后,以此设定量,进行背隙补偿1301~1320 启动齿节误差补偿功能[0,2] 节距补偿功能起动/关闭,进行节距补偿量测时,需先起动背隙补偿功能,0 : 不补偿,1: 单向补偿,2: 双向补偿1321~1340 齿节误差补偿间隔[1000,99999999]BLU 节距补偿功能起动后,以此设定量,设定补偿间距,每格的间距是多少1341~1360 原点在补偿表格的位置[1~100] 节距补偿功能起动,机械原点在补偿表的第几号,建议值是50。
MOTEC α系列伺服使用手册v1.1
使用手册
(V1.0)
SED 型伺服驱动器 SEM 型伺服电机
北京意美德科技发展有限公司 地址: 北京市东城区东中街 58 号美惠大厦 B 座 703A 邮编: 100027 电话: 010-65542170、65546546、65542692 传真: 010-65546721 65547015 网址:
α系列伺服电机系统使用手册
章 节:
第 1 章. 伺服电机与驱动器型号 第 2 章. 安装和配线 第 3 章. 驱动器 JP2 接口(I/O 控制信号)功能说明 第 4 章. 面板操作操作说明 第 5 章. 性能调整功能说明 第 6 章. 控制模式 第 7 章. 监视项 第 8 章. 伺服驱动器工作时序图 第 9 章.驱动器 JP3/JP4(通信端口)定义、接线及通信协议 附录 1: 驱动器参数列表 附录 2:故障信息、故障原因及处理措施 附录 3:SEM 电机电气参数
1. 伺服电机与驱动器型号 ................................................................. 5 1.1 伺服电机型号定义 ................................................................. 5 1.2 伺服驱动器型号定义 ............................................................... 6 1.3 α系列驱动器与电机组合 ........................................................... 6 1.4 α系列驱动器外形及安装尺寸图 ..................................................... 8
研控科技 YSS-C 系列 总线型步进电机驱动器 用户手册说明书
深圳市研控自动化科技有限公司目录前言 (1)1概述 (2)1.1产品介绍 (2)1.2特性 (2)1.3应用领域 (2)1.4产品命名规则 (3)2性能指标 (4)2.1电气特性 (4)2.2使用环境 (4)3安装 (5)3.1安装尺寸 (5)3.2安装方法 (5)4 驱动器端口与接线 (6)4.1接线示意图 (6)4.2端口定义 (7)4.2.1状态指示灯 (7)4.2.2通讯端口 (7)4.2.3输入/输出端口 (7)4.2.4电源端口 (8)4.2.5拨码开关 (8)4.3输入/输出端口操作 (8)4.4拨码开关设定 (9)5 电机规格及接线 (11)5.1技术规格 (11)5.2电机接线图 (11)6 CANopen协议 (12)6.1 CANopen协议概述 (12)6.1.1 CAN总线与CANopen (12)6.1.2 CANopen功能描述 (12)6.2驱动器控制协议CiA 402 (15)6.2.1 CiA402状态机 (15)6.2.2控制字与状态字 (16)6.2.3工作模式 (17)6.2.4位置模式 (18)6.2.5速度模式 (20)6.2.6回原点模式 (22)7对象字典 (26)8报警排除 (35)9版本修订历史 (36)10保修及售后服务 (37)10.1保修 (37)10.2售后服务 (37)附录1:快速编写运动控制功能块指南 (38)前言感谢您使用本公司总线型步进电机驱动器。
在使用本产品前,请务必仔细阅读本手册,了解必要的安全信息、注意事项以及操作方法等。
错误的操作可能引发极其严重的后果。
声明本产品的设计和制造不具备保护人身安全免受机械系统威胁的能力,请用户在机械系统设计和制造过程中考虑安全防护措施,防止因不当的操作或产品异常造成事故。
由于产品的改进,手册内容可能变更,恕不另行通知。
用户对产品的任何改装我公司将不承担任何责任。
阅读时,请注意手册中的以下标示:注意:提醒您注意文字中的要点。
研控伺服驱动器使用说明书

前言感谢您使用本公司交流伺服系统。
在使用本产品之前,请务必仔细阅读本手册,了解必要的安全信息,注意事项,以及操作方法等。
错误的操作可能引发极其严重的后果。
声明:1. 本产品的设计和制造不具备保护人身安全免受机械系统威胁的能力,请用户在机械系统设计和制造过程中考虑安全防护措施,防止因不当的操作或产品异常造成事故。
2. 由于产品的改进,手册内容可能变更,恕不另行通知。
3. 用户对产品的任何改装我公司将不承担任何责任,产品的保修单因此自动作废。
阅读时,请注意手册中的以下标志:表示错误的操作可能引起严重的后果,甚至危及 人员的生命。
表示错误的操作可能导致人身伤害和设备损坏。
1通电前请务必再次确认伺服驱动器和伺服电机已安装牢固,接线正确 调试2 先做空载调试,确认参数设置无误后,再做负载调试1 应接入一个紧急停止电路,确保发生事故时,能立刻切断电源2 在复位一个报警之前,必须确认伺服使能信号已关断,否则会突然启动 3伺服驱动器必须与规定的伺服电机配套使用4 不要频繁接通、断开伺服系统电源,防止损坏软启动电路和制动电路 5伺服驱动器和伺服电机连续运行后会发热,运行时和断电后的一 段时间内,不能触摸驱动器和电机,防止灼伤.使用6不得改装伺服系统第一章 概述1.1产品介绍:交流伺服技术自九十年代初发展至今,技术日臻成熟,性能不断提高,现已广泛应用于数控机床、印刷包装机械、纺织机械、自动化生产线等自动化领域。
交流伺服系统是本公司最新研制的交流伺服系统,采用美国TI公司运动控制专用DSP、大规模可编程门阵列(CPLD)和MITSUBISHI智能化功率模块(IPM),集成度高、体积小、保护完善、可靠性好,采用先进的空间矢量控制算法,性能已达到国外同类产品的水平,具有如下特点: 1)宽速比、恒转矩调速比为1:5000,从低速到高速都具有稳定的转矩特性。
交流伺服电机为恒力矩输出,即在其额定转速(一般为2000RPM或3000RPM)以内,都能输出额定转矩,在额定转速以上为恒功率输出。
伺服驱动器中文说明书
1.系统描述...................................................................................................................................- 3 -1.1系统布局图.......................................................................................................................................................- 4 -1.2基本原理...........................................................................................................................................................- 5 -1.3设备说明...........................................................................................................................................................- 6 -1.3.1电动缸DEMxB...........................................................................................................................................- 6 -1.3.2接线盒和电缆..........................................................................................................................................- 8 -1.3.3ACV9BR伺服驱动器...............................................................................................................................- 10 -2.技术规格....................................................................................................................................- 16 -2.1电动缸特性.....................................................................................................................................................- 16 -2.2伺服驱动器的技术特性.................................................................................................................................- 18 -2.3附属设备的技术规格.....................................................................................................................................- 20 -2.3.1主电源变压器........................................................................................................................................- 20 -2.3.2再生电阻RRC.........................................................................................................................................- 20 -2.3.3外部过滤器EFBR...................................................................................................................................- 21 -3.安装和接线.............................................................................................................................- 22 -3.1电动缸在塞棒机构上的安装.........................................................................................................................- 22 -3.1.1塞棒机构的准备....................................................................................................................................- 22 -3.1.1.1 塞棒机构固定件的图纸.....................................................................................................................- 22 -3.1.1.2 DEM电动缸在塞棒机构上的正确安装..............................................................................................- 23 -3.1.1.3塞棒机构间隙和阻力的检查..............................................................................................................- 24 -3.1.2电动缸的安装........................................................................................................................................- 26 -3.1.3塞棒的安装............................................................................................................................................- 27 -3.1.4隔热保护................................................................................................................................................- 28 -3.2.1接线盒JB9BR的安装说明.....................................................................................................................- 30 -3.2.2电缆说明................................................................................................................................................- 30 -3.2.3接线推荐规范和CE标准.......................................................................................................................- 32 -3.2.3.1 屏蔽线的接地.....................................................................................................................................- 32 -3.2.3.2 内部金属导体之间的连接.................................................................................................................- 32 -3.2.3.3 接线盒内的电缆连接.........................................................................................................................- 33 -3.2.3.4 驱动器侧的电缆连接.........................................................................................................................- 34 -3.2.4热区电缆的连接....................................................................................................................................- 35 -3.3驱动器ACV9BR的安装和接线.......................................................................................................................- 36 -3.3.1尺寸........................................................................................................................................................- 36 -3.3.2安装、定位和冷却................................................................................................................................- 37 -3.3.3电源的连接............................................................................................................................................- 39 -4.操作........................................................................................................................................- 40 -4.1手动模式.........................................................................................................................................................- 40 -4.2远程工作模式.................................................................................................................................................- 41 -4.3自动模式.........................................................................................................................................................- 41 -4.4塞棒关闭和安全装置.....................................................................................................................................- 42 -4.4.1塞棒关闭................................................................................................................................................- 42 -4.4.2断开电机电源(可选项).....................................................................................................................- 42 -4.5运行故障的处理.............................................................................................................................................- 43 -5.维护........................................................................................................................................- 44 -5.1检查周期.........................................................................................................................................................- 44 -5.2电动缸的检查和维护.....................................................................................................................................- 45 -5.3推荐的备件.....................................................................................................................................................- 49 -5.4伺服驱动器的故障代码.................................................................................................................................- 53 -5.5故障的数字输出代码.....................................................................................................................................- 57 -5.6驱动器复位和状态显示.................................................................................................................................- 58 -5.7没有报警显示时的故障排除.........................................................................................................................- 59 -6.辅助设备.................................................................................................................................- 61 -6.1DEM系列电动缸的测试台..............................................................................................................................- 61 -6.2塞棒机构MQS..................................................................................................................................................- 61 -1.系统描述SERT的塞棒执行器系统用于控制塞棒和塞棒机构的位置,以控制流入结晶器的钢水的流量。
ASE5A 数控交流伺服控制系统 使用说明书

5501E数控交流伺服控制系统使用说明书·在使用本产品之前,请先阅读《操作手册》及所搭配的缝纫机机械说明书。
·本产品必须由接受过专业培训的人员来安装或操作。
·请尽量远离电弧焊接设备,以免产生的电磁波干扰本控制器而发生误动作。
·请不要在室温45℃以上或者0℃以下的场所使用。
·请不要在湿度30%以下或者95%以上或者有露水和酸雾的场所使用。
·安装控制箱及其他部件时,请先关闭电源并拔掉电源插头。
·为防止干扰或漏电事故,请做好接地工程,电源线的接地线必须牢固的方式与大地有效连接。
·所有维修用的零部件,须由本公司提供或认可,方可使用。
·在进行任何保养维修动作前,必须关闭电源并拔掉电源插头。
控制箱里有高压危险,必须关闭电源五分钟后方可打开控制箱。
·本手册中标有符号之处为安全注意点,必须注意并严格遵守,以免造成不必要的损害。
安全事项第1章产品安装1.1产品规格品型号ASE5A电源电压AC220±20%V电源频率50Hz/60Hz最大输出功率550W1.2接口插头的连接将脚踏板及机头的各连接插头安插到控制器后面对应的插座上,各插座名称如图1-1所示,各插座名称如图1-2所示。
连接好,请检查插头是否插牢。
图1-1ASE系列控制器图①抬压脚电磁铁插座;②自动电磁铁插座;③脚踏板插座;:使用正常的力量插不进去时,请检查插头与插座是否匹配,插入方向或针的方向是否正确!图1-2控制器接口定义1.3接线与接地必须要做好系统的接地工程,请合格的电气工程人员予以施工。
产品通电及投入使用前,必须确保电源插座AC 输入端已安全可靠的接地。
系统的接地线为黄绿线,该地线请务必可靠连接至电网安全保护接地上,以保证安全使用,并可防止出现异常情况。
:所有电源线、信号线、接地线等接线时不要被其它物体压到或过度扭曲,以确保使用安全!第2章操作面板使用说明2.1操作面板的显示说明图2-1操作面板外观界面图标描述图标描述软启动功能开关键自动剪线功能开关抬压脚模式切换键上下停针位置选择进入参数和返回键一键恢复到保存参数进入菜单键键确认键亮度调节键左右加减键,首界面+—为速度增减2.2操作面板各按键功能说明序号外观名称功能描述1剪线和慢启动开关1,短按此键开关剪刀。
AS-i主站控制器使用手册
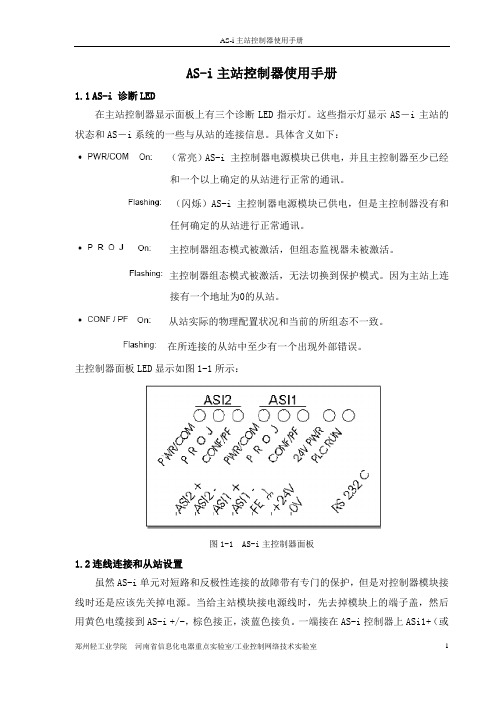
AS-i主站控制器使用手册1.1AS-i 诊断LED在主站控制器显示面板上有三个诊断LED指示灯。
这些指示灯显示AS-i主站的状态和AS-i系统的一些与从站的连接信息。
具体含义如下:(常亮)AS-i 主控制器电源模块已供电,并且主控制器至少已经和一个以上确定的从站进行正常的通讯。
(闪烁)AS-i 主控制器电源模块已供电,但是主控制器没有和任何确定的从站进行正常通讯。
主控制器组态模式被激活,但组态监视器未被激活。
主控制器组态模式被激活,无法切换到保护模式。
因为主站上连接有一个地址为0的从站。
从站实际的物理配置状况和当前的所组态不一致。
在所连接的从站中至少有一个出现外部错误。
主控制器面板LED显示如图1-1所示:图1-1 AS-i主控制器面板1.2连线连接和从站设置虽然AS-i单元对短路和反极性连接的故障带有专门的保护,但是对控制器模块接线时还是应该先关掉电源。
当给主站模块接电源线时,先去掉模块上的端子盖,然后用黄色电缆接到AS-i +/-,棕色接正,淡蓝色接负。
一端接在AS-i控制器上ASi1+(或ASi2+)和ASi-(ASi2-),另外一段接在AS-i电源模块的ASi+和ASi-上,同时利用辅助电源给AS-i控制器的+24V电源供电。
送上电源,AS-i 主站和AS-i电缆都被供上电了。
具体连接方式见图1-2。
如果AS-i 控制器被供电,而该系统上没有连接从站时,绿色的 LED‘+PWR/COM’闪烁。
图1-2 AS-i电源模块及主控制器接线方式通过主站控制器上的按钮配合文本/图形显示可以完成从站地址设置。
方法如下:使用方向向左的按钮(‘Menu')选择控制器菜单,然后使用按钮选择‘Slaves adr.’,确认选择用方向向左的按钮(‘OK’),然后选择‘Easy Startup’。
重要提示:每个从站中存储的地址都是稳定不变的,为了使AS-i主站能与每一个从站进行单独通讯,每个地址在系统网络中只能出现一次,也就是一个地址只能分配给一个从站。
研控ES2-BFI 系列交流伺服驱动器 用户手册(精简版)说明书

ES2-BFI系列交流伺服驱动器用户手册(精简版 V1.2)2022-03-02深圳市研控自动化科技有限公司目录目录 (1)第一章伺服系统选型 (2)1.1 驱动器规格 (2)1.2 伺服电机及驱动器型号说明 (3)1.3 伺服驱动器和伺服电机配套一览表 (4)1.4 配套电机参数 (4)1.5 配套线缆 (5)1.6 配件包 (7)第二章产品外形尺寸及安装 (8)2.1 伺服驱动器外形尺寸 (8)2.2 伺服驱动器的安装 (8)第三章伺服驱动器与电机连接 (9)3.1 系统结构图 (9)3.2 主回路 (10)3.3 动力线及抱闸接口 (10)3.4编码器接口 (10)3.5 控制信号CN1 (12)3.6 通信信号 (19)第四章面板显示 (20)4.1 面板操作器说明 (20)第五章控制 (23)5.1 基本控制 (23)5.2 位置控制模式 (35)5.3 速度控制模式 (66)第六章运行性能调整 (73)6.1 概述 (73)6.2 离线惯量辨识 (73)6.3 增益调整 (76)6.4 指令滤波调整 (79)6.5 不同模式下的调整参数 (79)第七章辅助功能 (81)7.1.JOG运行 (81)7.2 报警复位 (82)7.3 参数初始化 (83)7.4 数字信号强制输入输出功能 (84)第八章故障及处理 (86)8.1 故障诊断及处理措施 (86)8.2 警告的原因及处理措施 (88)第九章参数一览 (89)9.1参数组号 (89)9.2各组参数 (90)附录A:版本变更记录 (110)第一章伺服系统选型1.1 驱动器规格表1-1 ES2 BFI系列伺服驱动器基本规格1.2 伺服电机及驱动器型号说明1.2.1驱动器型号说明ES2 - 04 - B F I - XX图1-1 驱动器命名规则1.2.2伺服电机型号说明ASM J - 08 - 10 30 B - U 3 2 1 XX图1-2 电机命名规则1.3 伺服驱动器和伺服电机配套一览表表1-2 伺服驱动器与电机配套表1.4 配套电机参数表1-3 电机电机参数表1.5 配套线缆电机动力线命名规则如下图1-3 动力线命名规则电机动力线结构图如下表。
研控AS系列伺服故障及解决办法
故障及处理
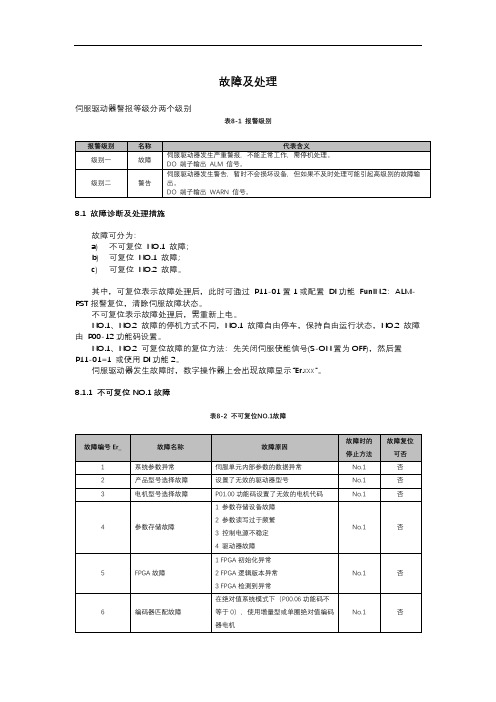
伺服驱动器警报等级分两个级别
表8-1 报警级别
8.1 故障诊断及处理措施
故障可分为:
a)不可复位NO.1 故障;
b)可复位NO.1 故障;
c)可复位NO.2 故障。
其中,可复位表示故障处理后,此时可通过P11-01置1或配置DI功能FunIN.2:ALM-RST报警复位,清除伺服故障状态。
不可复位表示故障处理后,需重新上电。
NO.1、NO.2 故障的停机方式不同,NO.1 故障自由停车,保持自由运行状态,NO.2 故障由P00-12功能码设置。
NO.1、NO.2 可复位故障的复位方法:先关闭伺服使能信号(S-ON置为OFF),然后置
P11-01=1 或使用DI功能2。
伺服驱动器发生故障时,数字操作器上会出现故障显示“Er.xxx”。
8.1.1 不可复位NO.1故障
表8-2 不可复位NO.1故障
8.1.2 可复位NO.1故障
表8-3 可复位NO.1故障
8.1.3 可复位NO.2故障
表8-4 可复位NO.2故障
8.2 警告的原因及处理措施
表8-5 警告原因及处理措施
注:
警告的复位方法:置P11-01=1 或使用DI功能2。
ASI控制工具用户手册0
AS-I 控制工具用户手册目录1 使用的符号 ----- -------------------------------------------- 32 特性 ---- --------------------------------------------- 33 最初的步骤 ---- --------------------------------------------- 33.1 系统需求3.2 软件安装3.3 软件注册3.4 帮助3.5 与AS-i 主控制器建立通信3.6 进入AS-i 运行状态3.7 使用AS-I 配置文件(*.acg)工作控制程序 ----- -------------------------------------------- 5 4 AS-i4.1 创建一个AS-i控制程序4.2 A S-i控制演示程序4.3 第一个AS-i控制程序5 菜单File… -------------------------------------------- 85.1 File…New5.2 File…Open5.3 File…Close5.4 File…SaveAs5.5 File…Save5.6 File…Print5.7 File…Print Preview…5.8 File…Print Setup…5.9 File…1,2,3,45.10 File (xi)6 菜单Edit… -------------------------------------------- 116.1 Edit…Undo6.2 Edit…Cut6.3 Edit…Copy6.4 Edit…Paste6.5 Edit…DeleteAll6.6 Edit…Select6.7 Edit…Find…6.8 Edit…Find Next6.9 Edit…Replace…6.10 Edit…Goto…7 菜单Program Control… -------------------------------------- 127.1 Program Control…Execute7.2 Program Control…Debug7.3 Program Control…Simulate7.4 Program Control…Upload7.5 Program Control…Download7.6 Program Control…Syntax Check7.7 Program Control…Compile7.8 Program Control…Start7.9 Program Control…Stop7.10 Program Control…Pause8 菜单Master… -------------------------------------------- 158.1 Master…New…8.2 Master…Identity8.3 Dialog Offline on Configuration Error…8.4 Dialog AS-i Control Properties…8.5 Master…AS-i Configuration ------------------------------- 17 8.6 Master…AS-i Configuration Editor(Textual Display)8.7 Master…AS-i Configuration Editor(Grafical Display)8.8 Dialog Master Configuration…8.9 Dialog Slave Configuration…8.10 Dialog Device Description… -------------------------------- 20 8.11 Dialog Store Configuration8.12 Master…AS-i Diagnosis8.13 Dialog Deblock AS-i Diagnosis…8.14 Master…AS-i Address Assistant8.15 Master…Insert AS-i Slave8.16 Master…Write Configuration to the AS-i Master…8.17 Master…Save Configuration to File…8.18 Master…Offline8.19 Master…Recent Master9 菜单Extras… -------------------------------------------- 239.1 Extra…GSD Wizard…10 菜单View… -------------------------------------------- 2310.1 View…Toolbar10.2 View…Statusbar10.3 View…Font10.4 View…Grafical Display11 Window… -------------------------------------------- 2611.1 Window…New Window11.2 Window…Cascade11.3 Window…Tile11.4 Window…Arrange Icons11.5 Monitor Windows11.6 Window…Input Monitor11.7 Window…Output Monitor11.8 Window…Flag Monitor11.9 Window…Timer Monitor11.10 Window…Counter Monitor11.11 Window…Output Log11.12 Window…1,2,…12 菜单Help -------------------------------------------- 2812.1 Help…Index12.2 Help…Using Help12.3 Registration12.4 Help…Info12.5 Context Help…AS-i 控制工具(1-7由钱昀翻译, 高晋占校)1 使用的符号这个符号警告用户可能的危险。
交流伺服驱动器用户手册2

1.SA系列交流伺服简介SA系列数字式交流永磁同步电机伺服驱动器(以下简称伺服驱动器)采用了国际上先进的DSP 芯片(数字信号处理器)对电机的位置、转速、转矩进行数字化智能控制。
该伺服驱动器不仅可靠性高、性能优异,而且可以通过设定用户参数,对系统进行任意组态。
例如:可以组成位置控制系统、速度控制系统、转矩控制系统等。
1.1SA系列交流伺服的使用方法1.1.1 速度控制方式速度控制方式的伺服驱动器标准使用方法,如下图所示:如上图所示,在上位机侧组成位置控制环。
在上位机中,进行位置指令和位置反馈的比较操作,即进行位置环调节的计算,输出模拟速度指令给伺服驱动器。
伺服驱动器接收上位机的模拟速度指令,进行速度环控制。
在这种控制方式下,上位机的位置反馈可以是伺服驱动器输出的电机编码器信号,也可以是安装在机械上的直线位置测量信号(例如光栅尺、磁栅尺、感应同步器等),即可以组成位置全闭环系统。
1.1.2 位置控制方式位置控制方式的伺服驱动器标准使用方法,如下图所示:上位机进行完定位及插补计算后,将位置指令以脉冲串的形式传送给伺服驱动器,由伺服驱动器进行位置指令和位置反馈的比较操作,即进行位置环调节的计算。
这种形式的伺服驱动器包含了位置控制环。
作为位置指令的脉冲串,可以是下面的任一种,在伺服驱动器侧可以通过设定用户常数进行选择:1)符号位+脉冲列2)具有90°相位差的两相脉冲序列3)正转脉冲序列+ 反转脉冲序列1.2 SA系列交流伺服驱动器的内置功能SA系列伺服控制器的内置功能说明如下:1)控制方式转换通过数字操作器设定用户常数,可以使伺服驱动器工作于位置控制方式或速度控制方式。
为了防止误操作,在伺服电机运行时(伺服使能状态),不能改变控制方式。
2)再生能量处理功能伺服驱动器内置再生能量处理电路和再生制动电阻。
当伺服电机起制动频繁或负载惯量过大时,则必须使用外置再生制动电阻。
3)能耗制动功能在伺服驱动器断电、伺服驱动器故障时,电机处于不受控状态。
研控伺服驱动器使用说明书
前言感谢您使用本公司交流伺服系统。
在使用本产品之前,请务必仔细阅读本手册,了解必要的安全信息,注意事项,以及操作方法等。
错误的操作可能引发极其严重的后果。
声明:1. 本产品的设计和制造不具备保护人身安全免受机械系统威胁的能力,请用户在机械系统设计和制造过程中考虑安全防护措施,防止因不当的操作或产品异常造成事故。
2. 由于产品的改进,手册内容可能变更,恕不另行通知。
3. 用户对产品的任何改装我公司将不承担任何责任,产品的保修单因此自动作废。
阅读时,请注意手册中的以下标志:表示错误的操作可能引起严重的后果,甚至危及 人员的生命。
表示错误的操作可能导致人身伤害和设备损坏。
1通电前请务必再次确认伺服驱动器和伺服电机已安装牢固,接线正确 调试2 先做空载调试,确认参数设置无误后,再做负载调试1 应接入一个紧急停止电路,确保发生事故时,能立刻切断电源2 在复位一个报警之前,必须确认伺服使能信号已关断,否则会突然启动 3伺服驱动器必须与规定的伺服电机配套使用4 不要频繁接通、断开伺服系统电源,防止损坏软启动电路和制动电路 5伺服驱动器和伺服电机连续运行后会发热,运行时和断电后的一 段时间内,不能触摸驱动器和电机,防止灼伤.使用6不得改装伺服系统第一章 概述1.1产品介绍:交流伺服技术自九十年代初发展至今,技术日臻成熟,性能不断提高,现已广泛应用于数控机床、印刷包装机械、纺织机械、自动化生产线等自动化领域。
交流伺服系统是本公司最新研制的交流伺服系统,采用美国TI公司运动控制专用DSP、大规模可编程门阵列(CPLD)和MITSUBISHI智能化功率模块(IPM),集成度高、体积小、保护完善、可靠性好,采用先进的空间矢量控制算法,性能已达到国外同类产品的水平,具有如下特点: 1)宽速比、恒转矩调速比为1:5000,从低速到高速都具有稳定的转矩特性。
交流伺服电机为恒力矩输出,即在其额定转速(一般为2000RPM或3000RPM)以内,都能输出额定转矩,在额定转速以上为恒功率输出。
ASEI控制器使用手册v13
AS-EICON II控制器使用手册感谢您使用本产品。
在使用本产品前请您先仔细阅读本手册,并保存本手册供以后参考。
本手册部分画面和代码是研发过程中的,可能与实际产品不符。
AS-EICON II是新一代基于极高性能的32位ARM7内核主控制器,拥有极高的运算速度,程序存储器容量大,接口齐全,稳定可靠,体积小巧,易学易用。
可配合EI套件的传感器,输出电机等模块一起使用,是程序课程教学和高级应用开发的优秀硬件平台。
采用VJC2.0流程图编程,或者VJC Studio 2009进行C代码进行程序开发。
另外,集成的USB2.0接口,程序下载方式更快速更易于使用。
电池使用 注意事项(使用前必需仔细阅读)1. 请谨慎使用电池,并仔细阅读以下事项:2. 在成人指导下使用电池。
3. 本机可以使用如下电池A 电池AAA(7号)镍氢电池,6节配套充电器B 电池AAA(7号)碱性电池,6节C 充电型锂电池7.2V 主板电池8.4V 输出的充电器4.充电型锂电池,正常情况下,两种电池充足电均需要5-7个小时。
充电器上红灯变为绿灯表明电池充电完毕。
如果10小时以上电池还未充足或者充电时间变得很短,请停止使用电池和充电器。
(过放或过充可能会导致电池寿命缩短)8. 如果发现电池外壳鼓胀,漏液,破损,请勿再继续使用该电池,这是非常危险的。
并尽 快回收或者交由专业人士处理。
9.如果发现任何异常气味、噪音或烟雾,请立即停止使用机器人。
关闭机器人电源,取出电池,远离易燃易爆物品。
危险1.请勿加热或焚烧电池。
2.请勿用金属物品将电池的正负端子连接。
3.请勿在容易接触到金属物品(如珠宝、别针、纽扣等)的地方携带或存放电池。
4.请勿将电池存放在阳光直射的地方,闷热的汽车里,高温的地方或靠近热源的地方,等等5.请勿尝试以任何方式分解或改装电池,如焊接等。
这样会破坏电池端子或造成电池液体飞溅,导致潜在的火灾、爆炸、电池漏液、过热或其他损坏6.如果电池液体飞溅入您的眼睛,请不要揉搓。
SYNTEC 一代单轴伺服操作说明书
一代单轴伺服操作说明书匯出日期:2023-09-21修改日期:2021-04-192023/09/21, 22:011 序言感谢您长期对本公司产品的使用与支持。
本公司伺服团队不断致力於各项产品的研发,期许本公司产品与服务能给使用者带来最大的效益。
新代高性能单轴驱动器系列产品为本公司最新推出之伺服驱动器,本产品使用高品质之元件与材料,并经过严格测试,采用精密向量控制,具有高精确度、高稳定性、高效率之特性。
本使用说明内容包括驱动器的硬体规格、安装、配线与讯号、面板显示及操作、运转操作与调机操作、参数全览与警报处理,能提供给使用者最正确的指引与操作,为充分发挥产品应有的优异性能与维护人员及设备的安全,在使用前请详细阅读本使用手册,并且妥善保存,以备日後调校与保养时使用,若有任何疑虑,请与本公司联络,本公司专业人员将竭诚为您服务。
2 适用机型本单轴操作手册适用於新代单轴驱动器。
3 硬体规格3.1 说明每部驱动器在出厂前均经过详细品管检查与防撞包装处理,请使用者收到产品後应先检查外观有无撞击损伤,并将外盒与产品上之序号做比对是否一致,若有不符,请第一时间与本公司联络。
型号说明3.2 外观介绍SVD-22A1-010SPD-32A1-055新I/O接头旧泛用I/O接头SPD-22A1-185、SPD-32A3-185、SPD-32A1-300新I/O接头旧泛用I/O接头3.3 外形尺寸SVD-22A1-010SVD-22A1-035SPD-32A1-055SPD-32A2-110、SPD-22A1-110 SPD-32A3-185SPD-22A1-185、SPD-32A1-3003.4 驱动器规格新代驱动器SVD-22A1-010SVD-22A1-035电源额定电源电压三相200~230V 50/60Hz电源电压容许范-15 ~ +10%围电源频率变动范±5%围输出额定输出电流 5.5A16.6A过电流能力150% 60s、200% 1s控制方式三相全波整流,IGBT-PWM控制回生电阻内建(可外接,请参考回生电阻选用章节)反馈编码器一般增量式ABZ编码器绝对式串列编码器PC通讯介面USB控制器串列通讯介Mechatrolink II面输出入信号数位输入4点,可规划数位输出2点,可规划冷却方式风扇冷却环境温度0℃ ~ 55℃(若环境温度超过45℃以上时,请强制周边空气循环)、储存:-20~65℃ (非冻结)湿度最大90% RH (非结露)、储存:90%RH以下 (非结露)安装地点室内(避免阳光直射);无腐蚀性气体、易燃性气体、油雾或尘埃海拔1000公尺以下至海平面振动最大 5.9m/s2重量(kg) 1.6 2.4新代驱动器SPD-22A1-110SPD-22A1-185三相200~240V 50/60Hz电源额定电源电压电源电压-15 ~ +10%容许范围电源频率±5%变动范围输出额定输出47A75A 电流过电流能150% 60s、200% 1s力控制方式三相全波整流,IGBT-PWM控制回生电阻必须外接,请参考回生电阻选用章节反馈编码器一般增量式ABZ编码器绝对式串列编码器PC通讯介面USB控制器串列Mechatrolink II通讯介面输出入信号数位输入4点,可规划数位输出2点,可规划冷却方式风扇冷却环境温度-10℃ ~ 50℃(若环境温度超过45℃以上时,请强制周边空气循环)、储存:-25~55℃ (非冻结)湿度最大90% RH (非结露)、储存:90%RH以下 (非结露)安装地点室内(避免阳光直射);无腐蚀性气体、易燃性气体、油雾或尘埃海拔1000公尺以下至海平面振动最大 9.8m/s2重量(kg) 5.617新代驱动器SPD-32A1-055SPD-32A2-110电源额定电源电压三相380~440V 50/60Hz电源电压容许范-15 ~ +10%围电源频率变动范±5%围输出额定输出电流21A27A过电流能力150% 60s、200% 1s控制方式三相全波整流,IGBT-PWM控制回生电阻必须外接,请参考回生电阻选用章节反馈编码器一般增量式ABZ编码器绝对式串列编码器PC通讯介面USB控制器串列通讯介Mechatrolink II面输出入信号数位输入4点,可规划数位输出2点,可规划冷却方式风扇冷却环境温度-10℃ ~ 50℃(若环境温度超过45℃以上时,请强制周边空气循环)、储存:-25~55℃ (非冻结)湿度最大90% RH (非结露)、储存:95%RH以下 (非结露)安装地点室内(避免阳光直射);无腐蚀性气体、易燃性气体、油雾或尘埃海拔1000公尺以下至海平面振动最大 9.8m/s2重量(kg) 5.6 5.6新代驱动器SPD-32A3-185SPD-32A1-300电源额定电源电压三相380~440V 50/60Hz电源电压容许范-15 ~ +10%围电源频率变动范±5%围输出额定输出电流42A52A过电流能力150% 60s、200% 1s控制方式三相全波整流,IGBT-PWM控制回生电阻必须外接,请参考回生电阻选用章节反馈编码器一般增量式ABZ编码器绝对式串列编码器PC通讯介面USB控制器串列通讯介Mechatrolink II面输出入信号数位输入4点,可规划数位输出2点,可规划冷却方式风扇冷却环境温度-10℃ ~ 50℃(若环境温度超过45℃以上时,请强制周边空气循环)、储存:-25~55℃ (非冻结)湿度最大90% RH (非结露)、储存:95%RH以下 (非结露)安装地点室内(避免阳光直射);无腐蚀性气体、易燃性气体、油雾或尘埃海拔1000公尺以下至海平面振动最大 9.8m/s2重量(kg)617•••••••••••••••••••••4 搬运与安装4.1 搬运搬运时必须拿取变频器的机身,不能只拿取上盖或其中部分,否则可能造成掉落的危险。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AS1系列交流伺服驱动器用户手册(精简版 V1.7)2018-03-23深圳市研控自动化科技有限公司目录目录 (1)第一章伺服系统选型 (2)1.1 驱动器规格 (2)1.2 伺服电机及驱动器型号说明 (3)1.3 伺服驱动器和伺服电机配套一览表 (4)1.4 配套应用电机编号 (5)1.5 配套线缆 (6)1.6 制动电阻相关规格 (7)第二章产品安装及外形尺寸 (8)2.1 伺服驱动器外形尺寸 (8)2.2 伺服驱动器的安装 (8)第三章伺服驱动器与电机连接 (9)3.1 系统结构图 (9)3.2 主回路 (10)3.3 编码器接口 (10)3.4 控制信号 (12)3.5 通信信号 (22)第四章运行与调整 (23)4.1 面板操作器说明 (23)4.2 运行模式使用说明 (26)第五章辅助功能 (34)5.1 JOG运行 (34)5.2 报警复位 (35)5.3 参数初始化 (36)5.4 模拟量指令偏移量调整 (37)5.5 数字信号强制输入输出功能 (38)5.6 离线惯量辨识 (41)第六章故障及处理 (44)6.1 故障诊断及处理措施 (44)6.2 警告的原因及处理措施 (47)第七章参数一览 (48)附录A:电机代码表 (75)附录B:报警代码表 (76)附录C:版本变更记录 (79)第一章伺服系统选型1.1 驱动器规格表1-1 AS1系列伺服驱动器基本规格基本规格驱动器型号AS1-02B AS1-04B AS1-08B AS1-10B AS1-15B AS1-30B 连续输出电流Arms 1.6 2.8 4 5.5 7.6 11.6 最大输出电流Arms 5.8 10 12 17 17 28电源输入220VAC主电源单相/三相,AC200~230V,50/60HZ控制电源单相,AC200~230V,50/60HZ使用环境温度使用温度:0℃~50℃储存温度:-20℃~85℃湿度0~90% RH以下(无结露环境)使用高度海拔1000m以下振动/冲击<1GIP等级/污染度IP20/污染等级2控制方法IGBT PWM空间向量控制编码器2500线省线式增量型/17bit串行增量型输入输出端口IO信号输入9个(通用)输出5个(通用)模拟量信号输入2个(12bit)输出2个(模拟量监测信号输出)脉冲量信号输入4个(低速脉冲,高速脉冲)输出4个(分频输出3,集电极开路输出1)通信功能USB 与PC连接RS-485 多组并联面板操作器LED显示再生回路功能750W及以上规格含内置再生电阻保护功能过电流、过载、过电压、低电压、过速度、过热、编码器异常、通信异常、位置偏差过大等控制模式位置控制;速度控制;转矩控制;功能规格位置控制模式位置命令格式脉冲/方向(PULSE/DIR);正/反脉冲(CW/CCW);A、B相正交脉冲;位置输入电路Line Driver;Open Collector最大输入频率Line Driver 低速500KppsLine Driver 高速4MppsOpen Collector 200Kpps平滑滤波器对位置指令做平滑处理,使电机运转更平滑稳定电子齿轮提供2组电子齿轮比抑振滤波器可以有效抑制外部信号干扰,及系统共振频率,保证设备运行稳定速度控制模式命令形态模拟电压指令输入,内部速度指令速度变动率电压波动额定电压±10%:0.5%(额定转速下)负载波动0-100%负载时:≤ 0.5%(额定转速下)温度波动25±25℃:≤ 0.5%(额定转速下)加减速设定范围0-10S模拟速度指令输入-10V~+10V转矩控制模式命令形态模拟转矩指令模拟转矩指令输入-10V~+10V共同自整定功能惯量识别、刚性整定编码器反馈电子齿轮自由设定异常信息记录8组历史信息记录1.2 伺服电机及驱动器型号说明驱动器型号说明AS1 – 04 B F I - XX①②③④⑤⑥①交流伺服系列AS1:研控AS1系列交流伺服②功率02: 200W 04: 400W 08: 800W 10: 1KW 15: 1.5KW 30: 3KW③电压等级 B:220V T:三相380V④产品类型F: 通用型 A: 高级型N:总线型⑤安装方式I: 基板安装⑥客制品xx:客制品编号伺服电机型号说明ASM D –08–10 30 B - U 1 1 1 - XX①②③④⑤⑥⑦⑧⑨⑩①系列号研控AS1系列伺服电机②特性D:小惯量 J: 大惯量 H: 高惯量③机座号04:40mm 06: 60mm 08: 80mm 09:90mm 10:100mm11: 110mm 13: 130mm④功率A5: 50W 01: 100W 02: 200W 04: 400W 08: 750W10: 1KW 15: 1.5KW 30: 3KW⑤额定转速(rpm)10: 1000rpm 15: 1500 rpm 20: 2000 rpm 30: 3000 rpm⑥电压等级B:200V T:400V⑦编码器类型U: 省线增量型2500线 A: 17位增量型B: 17位绝对值型 C: 23位增量型 D: 23位绝对值型⑧轴连接方式1:光轴 2:实心,带键 3:实心,带键,带螺纹孔4:实心,带螺纹孔⑨制动器、油封1:无 2:油封 3:制动器 4:油封+制动器⑩设计序号1:Ver. 1客制品x x:客制品编号第一章伺服系统选型 AS1系列伺服用户手册精简版V1.7 1.3 伺服驱动器和伺服电机配套一览表表1-2 伺服驱动器与电机配套表伺服电机型号电机框容量额定最高驱动器型号驱动器转速转速AS1-□□B** SIZE小惯量ASMD-04-A530B 40 50W 3000rpm 5000rpm 02B B ASMD-04-0130B 40 100W 3000rpm 5000rpm 02B B ASMD-06-0230B 60 200W 3000rpm 5000rpm 02B B ASMD-06-0630B 60 600W 3000rpm 5000rpm 08B B ASMD-06-0430B 60 400W 3000rpm 5000rpm 04B B ASMD-06-0630B 60 600W 3000rpm 5000rpm 08B B ASMD-08-0830B 80 750W 3000rpm 4500rpm 10B B大惯量ASMJ-06-0230B 60 200W 3000rpm 5000rpm 02B B ASMJ-06-0430B 60 400W 3000rpm 5000rpm 04B B ASMJ-08-0830B 80 750W 3000rpm 4500rpm 10B B ASMJ-08-1025B 80 1KW 2500rpm 3000rpm 10B B ASMJ-09-0830B 90 750W 3000rpm 3900rpm 08B B ASMJ-09-1025B 90 1KW 2500rpm 3300rpm 08B B ASMJ-10-1030B 100 1KW 3000rpm 4500rpm 15B C ASMJ-11-0820B 110 800W 2000rpm 2400rpm 15B C ASMJ-11-1230B 110 1.2KW 3000rpm 3500rpm 15B C ASMJ-11-1530B 110 1.5KW 3000rpm 3100rpm 15B C ASMJ-11-1830B 110 1.8KW 3000rpm 3200rpm 15B C ASMJ-13-1025B 130 1KW 2500rpm 2600rpm 15B C ASMJ-13-1325B 130 1.3KW 2500rpm 2700rpm 15B C ASMJ-13-1525B 130 1.5KW 2500rpm 2900rpm 15B C ASMJ-13-2625B 130 2.6KW 2500rpm 2700rpm 30B C ASMJ-13-2025B 130 2KW 2500rpm 2700rpm 30B C ASMJ-13-3020B 130 3KW 2000rpm 2300rpm 30B C高惯量ASMH-13-1010B 130 1KW 1000rpm 1300rpm 15B C ASMH-13-1215B 130 1.2KW 1500rpm 1800rpm 15B C ASMH-13-1515B 130 1.5KW 1500rpm 1800rpm 15B C ASMH-13-0915B 130 0.85KW 1500rpm 3000rpm 15B C ASMH-13-1315B 130 1.3KW 1500rpm 3000rpm 30B C ASMH-13-2315B 130 2.3KW 1500rpm 1700rpm 30B C1.4 配套应用电机编号表1-3 电机编号速查表电机大类额定电压伺服电机型号ASM□-□□-□□□□□-*****电机编号(P01.00)ASM 220V 低惯量、小容量ASMD-04-A530B-U*** 00001ASMD-04-0130B-U*** 00002ASMD-06-0230B-U*** 00003ASMD-06-0430B-U*** 00004ASMD-08-0830B-U*** 00005ASMD-06-0230B-U***-M 00011ASMD-06-0430B-U***-M 00010ASMD-06-0630B-U***-M 00013ASMD-06-0430B-U***-G 00014ASMD-06-0630B-U***-G 00015ASMD-08-0830B-U321-IP6705 00016ASMD-08-0830B-U321-G 00018大惯量、小容量ASMJ-06-0230B-U*** 00006ASMJ-06-0430B-U*** 00007ASMJ-08-0830B-U*** 00008ASMJ-08-0830B-U***-M 00009ASMJ-09-0830B-U*** 00012大惯量、中容量ASMJ-08-1025B-U*** 00101ASMJ-08-1030B-U*** 00111ASMJ-08-1030B-U***-B 00118ASMJ-09-1025B-U*** 00115ASMJ-10-1030B-U*** 00102ASMJ-11-1230B-U*** 00112ASMJ-11-1530B-U*** 00103ASMJ-11-1830B-U*** 00108ASMJ-11-0820B-U*** 00113ASMJ-13-1025B-U*** 00104ASMJ-13-1325B-U*** 00116ASMJ-13-1525B-U*** 00105ASMJ-13-2025B-U*** 00109ASMJ-13-2625B-U*** 00110ASMJ-13-3020B-U*** 00119ASMJ-13-2020B-U*** 00120高惯量、中容量ASMH-13-1010B-U*** 00106ASMH-13-1215B-U*** 00114ASMH-13-1515B-U*** 00107ASMH-13-2315B-U*** 00117ASMH-13-3015B-U*** 00121ASMH-13-0915B-U***00200ASMH-13-1315B-U***00201ASMH-13-0915B-U***(-N,-H) 00202ASMH-13-1315B-U***(-N,-H)00203注:17bit Inc. 编码器配置时,电机编号第四位为“1”17bit Abs. 编码器配置时,电机编号第四位为“2”23bit Inc. 编码器配置时,电机编号第四位为“3”23bit Abs. 编码器配置时,电机编号第四位为“4”例如电机编码"01105"为ASMJ-13-1525B-A*** 电机编码"02105"为ASMJ-13-1525B-B***电机编码"04105"为ASMJ-13-1525B-D***1.5 配套线缆电机动力线命名规则如下P1 –AS1 - 03 P04 F①②③④⑤①线材类型P1:直插 P2: 航插②驱动器系列驱动器AS1系列③电缆线长度03:线长度3米④功率P08:800W P15: 1.5KW P30: 3KW⑤安装方式F:固定型 M:可移动的电机编码器线命名规则如下:E1– AS1 - 03 A F①②③④⑤①线材类型E1:直插 E2: 航插②驱动器系列驱动器AS1系列③电缆线长度03:线长度3米④编码器规格A:17bit inc. B:17bit abs. U: less wire2500 lines⑤安装方式F:固定型 M:可移动的配套线缆外观图表1-4 配套线缆外观第一章伺服系统选型 AS1系列伺服用户手册精简版V1.7 1.6 制动电阻相关规格表1-5 内置制动电阻规格伺服驱动器型号内置制动电阻规格最小允许电阻值(Ω)电容可吸收最大制动能量(J)电阻值(Ω) 容量(W)单相220V AS1-01BFI - - 50 9 AS1-02BFI - - 50 9 AS1-04BFI - - 45 18单/三相220V AS1-08BFI 50 50 40 26 AS1-10BFI 50 50 20 26三相220V AS1-15BFI 25 80 15 47 AS1-30BFI 25 80 15 47第二章产品安装及外形尺寸 AS1系列伺服用户手册精简版V1.7第二章产品安装及外形尺寸2.1 伺服驱动器外形尺寸Frame B: AS1-02B, AS1-04B, AS1-08B,AS1-10BFrame C: AS1-15B, AS1-30B表2-1驱动器外形尺寸型号L(mm) H(mm) D(mm) L1(mm) H1(mm) D1(mm) 螺丝孔Frame C 90 160 183 80 150 75 4-M4 Frame B 58 160 177 48 150 752.2 伺服驱动器的安装图2-1伺服驱动器安装第三章 伺服驱动器与电机连接 AS1系列伺服用户手册精简版V1.7第三章 伺服驱动器与电机连接3.1 系统结构图图3-1系统结构图驱动器各部位名称、功能及规格如下。