第六章 船用计程仪资料
船用计程仪标准

船用计程仪标准在广阔的海域中,一艘船舶如何准确地知晓自己的速度和航程呢?这就要依靠船用计程仪。
作为船舶测速的专业设备,计程仪在航海中起到了至关重要的作用。
一、船用计程仪的概念与作用船用计程仪,顾名思义,是一种用于测量船舶航行速度和累计航程的仪器。
通过精确测量船舶相对于水流的航速,为船舶驾驶人员提供航行过程中的实时速度和累计航程,为船舶的安全航行和性能评估提供重要依据。
二、船用计程仪的类型1.电子计程仪:通过安装于船舶底部或尾部的超声波或激光传感器,测量船舶相对于水流的航速,精度高、稳定性好。
2.机械式计程仪:利用螺旋桨的旋转速度来推算航速,结构简单、价格低廉。
3.陀螺计程仪:利用陀螺仪的特性测量船舶的姿态和航向,从而推算航速,精度高但价格昂贵。
三、技术指标与性能参数1.测量精度:船用计程仪的测量精度是衡量其性能的重要参数,包括相对精度和绝对精度。
2.响应速度:计程仪的响应速度决定了其能否快速准确地跟踪船舶的航速变化。
3.环境适应性:船用计程仪需要在不同环境和气候条件下工作,因此其环境适应性尤为重要。
4.稳定性与可靠性:长期使用的稳定性以及在各种工作条件下都能保持可靠的性能是船用计程仪的基本要求。
四、标准化组织与认证国际海事组织(IMO)和各国船级社都制定了一系列船用计程仪的标准和规范。
这些标准对提高计程仪的性能、确保使用安全具有重要意义。
生产厂家需按照相关标准进行生产和检测,确保产品质量符合要求。
五、使用环境及维护要求在使用过程中,应定期对船用计程仪进行维护和保养,确保其正常运转。
同时,使用时应遵守相关环境保护法规,避免对水域造成污染。
六、产品质量监控与故障排查为确保计程仪的准确性和可靠性,生产厂家需进行严格的质量控制。
用户在使用过程中如发现异常情况,应及时联系专业人员进行故障排查和维修。
常见的故障排查方法包括外观检查、通电检查和性能测试等。
通过及时排除故障,可以保证船用计程仪的正常使用,从而提高航行的安全性。
第6章相关测速技术.ppt

T 0
x1 (t)x2
(t
)dt
逐点改变时延τ ,当R(τ)达到最大值时, 即τ= τ0 ,
求速度 v d
2 0
17
2019/10/28
6.3 时间相关测速和空间相关测速
时间相关测速 方法1:直接利用相关函数求(相关)时延τ
这种方法的缺点:对τ的搜索,运算量较大。而且为保证足 够的测速精度,必须量化得足够精细。
用自相关函数代替互相关函数的条件是:两接收器信号包 络相同,只差一个时间τ0 。
方法:利用包络的功率谱带宽与多普勒频率扩展和相关函 数参数宽度之间的关系求解相关时延。
19
2019/10/28
6.3 时间相关测速和空间相关测速
时间相关测速
方法2:利用多普勒频偏、功率谱和相关函数求
20°时, sinθ和θ相 差不到 1.5%。可 以用
什么是“波形不变”原理?要满足什么条件? 时间相关测速和空间相关测速 声相关计程仪的特点 相关测速声呐的海底回波和体积混响 声相关计程仪的有关参数 相关计程仪的信号形式 时空相关测速模型
4
2019/10/28
6.1 引言
(a) 多普勒计程仪 4个波束
(b)声相关计程仪 单个发射波束
4
DC B
A
AO2 BO2 AO BO
AO BO
在 r1 d 时有
AB=d-δx =d/2 DC=δx=d/2
AO2
r1
d 4
2
H2
r12
1 2
r1d
H2
O
要求两声线双程 差不大于1/4波长
流体力学船舶仪表

(1)离心式转速表:利用离心力原理的机械式转速表。 (2)磁性转速表:利用旋转磁场产生旋转力,利用旋转
力与游丝力的平衡来指示转速。
(3)定时式转速表:利用计时机构控制计数机构。 (4)其他转速表 :振动式、电动式、磁电式、闪电式、
电子式转速表。
按使用方法分:
2、常用流量计
(1)浮子式流量计:在一个竖直安装的上大下小的锥形管 中内放一浮子,流经管内的液体流量越大,浮子被抬得越 高。浮子静止的高度可作为流量大小的量度。为保证浮子 在管中对正不影响测量精度,可使用导向钢丝,或在浮子 上开斜槽。
(2)涡轮式流量计: 相当于在管道中安装了水涡轮,当其被液流 冲动而旋转时,通过磁电变换器可测量流量数量。叶轮的转速与被 测流量成正比。 特点:既可测量瞬时流量,也可测量积累流量;其误差较小,灵敏 度较高。 (3)椭圆齿轮式流量计:相当于一个液压马达,在进出口的液流 压差的作用下工作。它的转速正比于通过的液体流量。 特点:容积效率高,测量误差小,测量范围广。一般用于测量一定 时间内液体的总流量。
二、压力表的种类及工作原理 1、压力表工作原理, 2、测量值与量程的关系, 3、U型液柱式压力表的工作原理。 4、弹簧管式压力表工作原理和使用事项。
5、电接点压力表的工作原理
一、温度计
计量温度的方法:直接测量法,间接测量法。 (一)直接测量法
定义:计量温度的元件与被计量对象直接接触,当感温元件与 被计量物体呈热平衡时,感温元件所示温度就是被测物体的温度。
3、定时式转速表:利用计时机构控制计数机构。按在一定时间间 隔(3秒或6秒)内测量转速的平均值,
特点:精度高、携带方便。
4、磁电式转速表:根据非电量电测量的原理制成。是将传感器 (传感器:直流发电机式、交流发电机式、光电式等。 )连接到被 测转速的轴上,当被测轴旋转时,传感器产生的电流、电压或频率
船用计程仪PPT课件

七、DS-50型多普勒计程仪简介: 1.主要特点: (1)可工作于“ 海底跟踪”、“海层 跟踪”和“自动跟踪”三种工作方式 。
(2)能同时测量船舶纵向前、后及横移 速度 。 (3)浅水(最小达到船底下1m)测量也有较 高的测量精度;在1~200m的水深范围内可精 测对地的速度,超过200m则计程仪自动转换 为测量对水的速度 。
第二节 电磁计程仪
一、定义 利用电磁感应原理来测量船舶航行时 对水的速度,并累计航程的计程仪。
第1页/共20页
第二节 电磁计程仪
二、组成
传感器
放大器
指示器
传感器:将非电量的速度信息转变成 电压或电流信息。
放大器:放大电信号。 指示器:显示航速和航程。
第2页/共20页
第二: 原理:
图7-9
第15页/共20页
第四节 声相关计程仪
一、测速原理
第16页/共20页
一、测速原理
s
2 1s
v 2v
v 1 s
2
第17页/共20页
第四节 声相关计程仪
二、声相关计程仪特点 采用相关接收技术测延时, 测速精度与声速无关。 可兼作测深仪使用。
第18页/共20页
三、SAL-R1型声相关计程仪简介:
f0
v
vcos
第6页/共20页
单波束多普勒计程仪存在的问题: 船舶摇摆与颠簸
f 2 f0 v cos usin
c
u
usin f0 v
vcos
第7页/共20页
五、双波束多普勒计程仪
双波束多普勒计程仪的测速原理
f fF f A
2 f0v cos 2 f0v cos
c
c
4 fv cos0
航海仪器声相关计程仪介绍

智能化:声相关计程仪将引入人工智能技术, 实现自主导航和故障诊断。
演讲人
声波传播原理
01 声波在介质中的传播:声
波在介质中以一定的速度 传播,遇到障碍物时会发 生反射、折射和散射等现 象。
03 声波的相位和振幅:声波
的相位是指声波在传播过 程中的位置,振幅是指声 波在传播过程中的能量大 小。
02 声波的频率和波长:声波
的频率是指声波在单位时 间内振动的次数,波长是 指声波在一个周期内传播 的距离。
声相关计程仪的测量精度:随着技术的进步,测 量精度不断提高
声相关计程仪的应用领域:从最初的航海领域扩 展到其他领域,如海洋学、水文测量等
声相关计程仪的发展趋势:智能化、集成化、小 型化是未来发展的趋势
应用领域拓展
海洋科学研究:声 相关计程仪在海洋 生物研究、海洋环 境监测等方面发挥 重要作用。
海洋资源开发:声 相关计程仪在海洋 油气资源勘探、海 底矿产资源开发等 方面具有广泛应用。
声相关计程仪结构
声源:产生声波的设备, 如超声波发生器
接收器:接收声波的设备, 如超声波接收器
信号处理单元:对声波信 号进行处理和分析的设备, 如信号放大器、滤波器等
显示单元:显示声相关计 程仪测量结果的设备,如 显示屏、指示灯等
控制单元:控制声相关计 程仪工作的设备,如控制 器、电源等
外壳:保护声相关计程仪 内部结构的设备,如外壳、 防护罩等
04 声波的干涉和衍射:声波
在传播过程中遇到障碍物 时会发生干涉和衍射现象, 影响声波的传播速度和方 向。
声相关测量原理
01
声相关计程仪通过测量声波在 水中的传播时间来计算距离
计程仪(shiplog)
计程仪(shiplog)定义:船用计程仪是用来测量船舶运动速度和累计船舶航程的仪器。
分类:船用计程仪按其测量参照物不同分为相对计程仪和绝对计程仪两种。
相对计程仪(relative log),为对水跟踪,计风不计流。
绝对计程仪(absolute log),可以对海底跟踪,计风计流;水深很深时,对水层跟踪。
一、电磁计程仪(electromegnatic log)1.测速、计程原理利用电磁感应原理测量船舶相对水的速度和航程的计程仪。
测速原理:船舶以速度V前进或后退时,水层切割传感器磁场的磁力线,两个电极有感应电势产生:航速V与感应电势成正比。
将传感器产生的感应电势送到显示器,经放大处理后可变为航速显示。
计程原理:船舶的航程是航速对时间的积累,设置航速积分器,测量航程并显示。
测速、计程原理框图:2.主要组成及作用1)传感器传感器是电磁计程仪的测速器件,分为平面型和导杆型两种。
现多使用平面型。
作用是将非电量的航速转换为与航速成正比的电信号,便于传输、放大和处理。
使用与保养:激磁电源要稳定;传感器舱室避免高温和潮湿;进坞时,检查传感器电极有无损伤并进行清洁;在热带海域停泊时间较长时,应给传感器通电。
2)放大器(amplifier)组成:输入电路、放大电路、变换电路、分频电路、自校电路和电源电路。
作用:放大传感器送来的航速信号;抑制传感器本身的缺陷产生的干扰信号;检测放大器本身功能。
3)显示器(display unit)航速显示和航程显示。
二、多普勒计程仪(doppler log)利用多普勒效应测量船舶绝对速度和航程或对水层的速度和航程的计程仪。
1.测速、计程原理测速器件为超声波换能器(transducer)。
1)多普勒效应(doppler efect)多普勒效应:当发射源与接收体之间存在相对运动时,接收体接收的发射源发射信息的频率与发射源发射信息频率不相同的现象。
多普勒频移(doppler shift):接收频率与发射频率之差。
航海仪器课件:第六章 船用计程仪

E=BLV×10-8
V=E/(BL×10-8 )
B~
(2)实现:传感器
图7-1
∫t
(3)计程原理:S= Vd0t
原理归结:中间柱上的线圈通 电时产生磁场磁力线,当相对 流作为无数根导体切割磁力线 时电极间产生感应电动势(即 传感器输出的电压)E
安装与维护
安装: 1、通常应装于船底中部平坦处,不装于弯处 2、装于测深仪换能器之后;(测前计后亦可平行) 3、不装于磁处; 4、电极及其所在的平面不准油漆,且应屏蔽良好; 5、前方5米不得有排水孔、突出物。 维护: 1、停泊时间较长应经常处于通电状态,防止海生物寄存于传 感器及附近; 2、传感器使用3年后,在进坞时调换水密橡皮圈保证水密。
当船速不为零时,两个接收换能器收到的回 波信号除存在时间延时量τ外,其信号包络幅 值和波形几乎相同。
1. 在船底安装两个接收换能器——Rf在前、Ra在后,其间距为S,发射
换能器T位于中间。
2. T垂直向海底发射超声波,在某时刻t1,Rf收到经A点反射的回波;经
过一段时间τ、到t2时刻,Ra也收到经同一点A反射的回波。(非A点反
5.多普勒计程仪的分类
•一元多普勒计程仪(一元仪或普通仪):在船底前部纵向装 一对(2个)换能器(每个换能器都收发兼用)、双波束、能 测船纵向速度,导航用; •二元仪(导航仪):在船底前部纵横向装两对(4个)换能器、 四波束、即换能器能向前后左右的四个方向发射波束,既能测 纵速也能测艏横移速度,可作为船位推算导航使用。 •三元仪(进港仪):在船底前部纵横向装两对(4个)换能器 并在船底后部横向装一对(2个)换能器、六波束、既能测纵 速也能测船首尾横移速度,能反映船舶运动的全貌,进港靠泊 锚泊用。
Vcosθ
项目使用船用计程仪

1如船无风无流时船速为10节,现顺风顺流各2节,则电磁计程仪显示的航速应为_______;多普勒计程仪显示的对地航速应为_______。
A、10节;12节 B、12节;14节 C、14节;12节 D、10节;14节B2你船静水航速10节,现顶风、顶流各2节,则相对计程仪显示的航速为_______节,实际航速为_______节。
A、10;10 B、6;6 C、6;8 D、8;6D3计程仪输出至其他导航仪的航速信息,规定为_______。
A、100P/海里 B、200P/海里 C、300P/海里 D、400P/海里B4在测速场测量计程仪改正量时,船速应为_______。
A、全速 B、半速 C、低速D、全速、半速和低速D5只能反映出风对船舶速度的影响而无法反映水流对船速的影响的计程仪为_______。
A、电磁计程仪B、绝对计程仪C、声相关计程仪D、多普勒计程仪A6下列关于计程仪的说法_______是不妥的。
A、声相关计程仪是绝对计程仪 B、绝对计程仪是可测对地的速度 C、多普勒计程仪可测对地速度 D、船上电磁计程仪可以测量船舶的纵向速度和横向速度D7测量船舶相对于水的速度的计程仪是_______计程仪。
A、绝对 B、相对 C、多普勒 D、声相关B 8相对计程仪测定的航速和航程是船舶相对于_______。
A、风和流的速度和航程 B 、水的运动速度和航程 C、水的运动速度相对地航程 D、对地的速度和航程B 9绝对计程仪与相对计程仪的主要区别是_______。
A、适用航速大 B、可测对地速度 C、可以测深 D、可测横向速度B 10_______可测船舶左右移动速度。
A、电磁计程仪和多普勒计程仪 B、多普勒计程仪 C、声相关计程仪和电磁计程仪 D、多普勒计程仪和声相关计程仪D 11能测定船舶前进、后退速度又能测定船舶横移速度的计程仪是_______。
A、声相关计程仪 B、电磁计程仪 C、多普勒计程仪 D、多普勒计程仪和声相关计程仪D 12目前多普勒计程仪和声相关计程仪,均可工作在_______状态。
第六章 船用计程仪资料
第七章船用计程仪第一节概述船用计程仪是一种测量船舶航速和累计航程的导航仪器。
计程仪所提供的航速信息对船舶驾驶极为重要,其主要作用如下:1.计程仪测量的航速信息结合陀螺罗经或磁罗经提供的航向信息,可进行船舶船位推算。
2.向卫星导航仪、自动综合导航仪、ARPA和真运动雷达等导航仪器提供航速信息,可实现船舶自动定位和利于船舶操纵及自动避让。
3.向现代化大型或超大型船舶提供纵向和横向速度信息,保证这些船舶在狭水道航行、靠离码头和锚泊时的安全。
船用计程仪按其测量参考坐标系的不同,可分为相对计程仪和绝对计程仪两类。
相对计程仪只能测量船舶相对于水的速度并累计其航程,如水压式、电磁式等计程仪。
绝对计程仪可以测量船舶对地的速度并累计其航程,如多普勒计程仪和声相关计程仪。
但是当测量水深超过其跟踪深度范围时,绝对计程仪便转换成为跟踪水层的相对计程仪。
具体地讲,工作于“海底跟踪”方式的多普勒、声相关计程仪属于绝对计程仪,工作于“水层跟踪”方式的多普勒、声相关计程仪属于相对计程仪。
水压式计程仪是第二次世界大战后,应用流体力学的伯努利定理制成的,即船舶航行时的水流动压力与航速平方成正比的原理。
这种计程仪在中高速测速时精度较高,但在低速测量时精度和灵敏度均较差,而且其操作维护也不方便,已基本被淘汰。
电磁计程仪是应用电磁感应原理来测量船舶相对于水的航速和累计其航程的。
其优点是测速线性好,测速范围大,而且可测量船舶后退速度,精度较高(1%~2%或0.2Kn),成本低且使用方便。
因此,这种型号的计程仪目前在船舶上得到了普遍的使用。
典型的如国产的CDJ型、日本的EML型、法国的BEN型等。
多普勒计程仪是20世纪70年代初期的产品,它是随着航运事业的发展,为了解决某些大型、超大型船舶的进出港、靠离码头和锚泊等问题而制成的。
这种计程仪是利用声波的多普勒效应进行测速的,它可以提供船舶相对于海底的绝对航速和航程信息,同时还可以测量船舶后退及船首尾横移速度。
航海仪器——测深仪和计程仪实操

航海仪器——测深仪和计程仪实操本实验提供的船用计程仪为宁禄SL806,该设备是用于船舶导航的液晶显示二维(四波束二元)计程仪,能以数字与图形方式显示多种参数,二维方向上(船艏艉方向,左右方向)的速度、合成偏移速度、合成偏移角度、海水温度。
测深仪工作原理为,利用多普勒效应,测定超声波从发出到接收的频率之差(多普勒频移)来测速的。
实验步骤1.计程仪的开机及亮度调节:轻按电源开关,等待设备自检完毕,再按屏幕右侧上下键调节屏幕亮度;2.设置工作状态及选择计程仪工作方式(本机无工作模式转换功能):(1)报警设置及里程表复位:在F1菜单中,按A键解除报警;按B键调节高度报警(速度报警上限),也可在激活状态下按上下键微调;按C键调节低速报警(速度报警下限),操作同B键;按D键清零航程,再按确认键完成输入;(2)系统设置:在F2菜单中,按A键切换航速单位,再按确认键完成;按B键切换里程单位,再按确认键完成;按C键切换系统语言,再按确认键完成;按D键进入F3/F4菜单,反复按D键可以在F3和F4菜单之间切换;(3)自动校准设置:在F3菜单中,首先要获得一条已知航线的距离数据、GPS高精度测距数据、计程仪高精度测距数据,再对这条航线正程和逆程进行校准,如果有GPS信号接入,则不需要手动输入,具体操作同上;(4)手动校准设置:在F4菜单中,可选择本机F3菜单中存储的三组校准数据,分别按功能键能够手动调节偏移角度、偏移速度和真实速度;3.读取航速和航程数据:在主机显示界面读取相关信息。
本实验提供的回声测深仪为宁禄DS207,该设备拥有高灵敏度接收器并配有先进的探测软件,能实时、精确、稳定地测量并显示水底地形、水底深度、物体形状。
其工作原理为声波在水下往返750米正好是1秒钟,测量声波的往返时间,可以计算水下目标深度。
实验步骤1.测深仪的开机及亮度调节:轻按电源开关,等待设备自检完毕,再按“亮度”和“昼夜”调节按钮调节;2.选择侧深工作模式和显示方式:按“自动”按钮,选择自动或者手动模式,手动模式下根据海图水深,再按“量程”按钮,选择合适量程;3.调整回波信号:旋动“增益”旋钮,抑制杂波使回波清晰,再根据海底底质等情况,按“色标”按钮,使回波轮廓清晰;4.读取深度数据:画面左上角数字显示稳定时可以直接读取,如果数据显示闪烁,则读取第一道回波最上沿对应的量程读数,精度精确到0.1米;5.设置报警功能:按“报警”上下调节最小富裕水深报警。
计程仪

50年代出现的多普勒计程仪和70年代制成的声相关计程仪,在一定水深内可以直接测量船舶相对于水底的航 速和航程,使计程仪发展到一个新的水平。
简介
简介
计程仪是用于测量航程的仪器,用于测量航速、累计航程,它和罗经同为航迹推算的基本仪器,在海图上作 业就是根据计程仪读数在航线上量取航行距离。
早期船舶上装的是转轮式计程仪,通过测量海水流速,测得船舶航速,再通过计时装置得到航程。现代船舶 上广泛使用电磁计程仪,利用电磁感应原理,测得船舶的航速和航程 。
分类
分类
近代计程仪主要由测速部分和指示部分组成。测速部分用以检测和放大船舶航速信号或航程信号;指示部分 用机械或电气形式显示船舶航速或航程,再通过积分或微分方法显示航程或速度。不同类型的计程仪的工作原理 和性能如下所述。
①拖曳计程仪。利用相对于船舶航行的水流,使船尾拖带的转子作旋转运动,通过计程仪绳、联接锤、平衡 轮,在指示器上显示船舶累计航程。这种计程仪线性差,高速误差大,受风流影响大,操作不便,但性能可靠, 有的船舶作为备用计程仪。
计程仪②转轮计程仪。利用相对于船舶航行的水流,推动转轮旋转,产生电脉冲或机械断续信号,经电子线 路处理后,由指示器给出航速和航程。这种计程仪线性好,低速灵敏度较高,但机械部分容易磨损。除小船应用外, 已逐渐被淘汰。
③水压计程仪。利用相对于船舶航行水流的动压力,作用于压力传导室的隔膜上,转换为机械力,借助于补 偿测量装置,将机械力转换为速度量,再通过速度解算装置给出航程。这种计程仪工作性能较可靠,但线性差, 低速误差大,不能测后退速度,机械结构复杂,使用不便,渐被淘汰。
计程仪及回声测深仪课件

回声测深仪的原理
回声测深仪的原理基于声波在水中传播的特性。声波在水中传播的速度受水温、水压和盐度等 因素的影响,因此需要事先对声速进行测量和修正。
回声测深仪通过发射器发出声波信号,声波在水中传播遇到水底后反射回来被接收器接收,通 过测量声波在水中传播的时间和声速,可以计算出水深。
回声测深仪的应用
计程仪及回声测深仪的发展
04
趋势
技术发展趋势
01 智能化
随着人工智能和大数据技术的快速发展,计程仪 及回声测深仪将逐渐实现智能化,具备更强的数 据处理和学习能力。
02 集成化
未来计程仪及回声测深仪将趋向于集成化,将多 种功能整合到一个设备中,便于操作和维护。
03 精准化
随着传感器和信号处理技术的发展,计程仪及回 声测深仪的测量精度将进一步提高,能够提供更 准确的数据。
应用领域发展趋势
海洋资源开发
随着海洋资源的日益重要,计程 仪及回声测深仪在海洋资源开发
领域的应用将进一步拓展。
海洋环境监测
计程仪及回声测深仪能够提供准确 的海洋环境信息,有助于海洋环境 监测和保护。
海洋科学研究
计程仪及回声测深仪在海洋科学研 究领域的应用将进一步深化,为海 洋科学研究和探索提供有力支持。
技术创新展望
智能化技术
无线通信技术
随着人工智能和机器学习技术的不断 发展,计程仪及回声测深仪将更加智 能化,能够自动识别和判断水下环境 ,提高测量精度和效率。
随着无线通信技术的发展,未来的计 程仪及回声测深仪将能够实现实时数 据传输和处理,提高测量数据的利用 效率和安全性。
传感器技术
Байду номын сангаас
新型传感器技术的研发和应用,将进 一步提高计程仪及回声测深仪的测量 精度和可靠性,同时降低设备成本和 体积。
航海仪器9
1、叙述目前船用计程仪的分类及各类型计程仪的特点。
按测量参考坐标系分类:
(1)相对计程仪:所测量的航速和累计的航程均系船舶相对于水而言。
(2)绝对计程仪:在一定水深范围内是直接测量船舶相对于海底的速度,并累计船舶实际行驶过的航程。
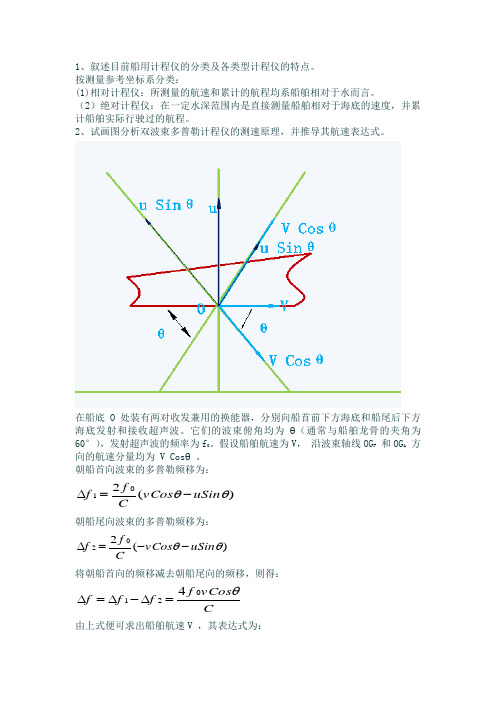
2、试画图分析双波束多普勒计程仪的测速原理,并推导其航速表达式。
在船底O 处装有两对收发兼用的换能器,分别向船首前下方海底和船尾后下方海底发射和接收超声波。
它们的波束俯角均为θ(通常与船舶龙骨的夹角为60°),发射超声波的频率为f 0。
假设船舶航速为V , 沿波束轴线OG F 和OG A 方向的航速分量均为 V Cos θ 。
朝船首向波束的多普勒频移为:
)(201θθuSin vCos C
f f -=∆ 朝船尾向波束的多普勒频移为: )(202θθuSin vCos C f f --=
∆ 将朝船首向的频移减去朝船尾向的频移,则得:
C
vCos f f f f θ0214=∆-∆=∆ 由上式便可求出船舶航速V ,其表达式为:
f Cos f C v ∆=θ04
3、试述声相关计程仪的概念及其特点。
定义:声相关计程仪是应用相关技术处理水声信息测量船舶航速并累计航程的计程仪。
特点:(1)采用垂向发射和接收超声波信号,并对被接收的回波信号的幅值包络进行相关处理来测速;
(2)可工作于海底跟踪和水层跟踪两种方式,即可测对地的速度,又可测对水的速度;
(3)测量精度不受声速变化的影响;
(4)它同时可测量水深,兼作测深仪使用。
计程仪、测深仪技术规格书

计程仪、测深仪技术规格书
一、设备需求
根据上海海事大学航海技术实验中心需求,根据远洋船舶常见设备为原则,采购船舶航行数据记录仪。
意向品牌:JRCsFURUNO、领路领航
数量:计程仪2台、测深仪2台
二、技术参数:
1>船用测深仪(数量:2台,建议不同品牌)
(1)标准:符合IMo标准A.694(17);MSC.191(79);MSC.74(69)
(2)通过CCS规范认证
(3)测量范围:1-200米
(4)发射频率:200kHz
(5)工作电压:AC220V
(6)需提供模拟信号,以代替传感器。
2、多普勒船用计程仪(数量:2台,建议不同品牌)
(I)标准:符合IMOA.694(17);MSC.96(72);MSC.334(90);MSC.191(79)
(2)通过CCS规范认证
(3)测量速度范围:-10.00-40.0Okn
(4)距离测量范围:0.00-999999.99k∩
(5)发射频率:2MHz
(6)工作电压:AC220V
(6)需提供模拟信号,以代替传感器。
三、服务要求:
1、提供不少于1年的免费质保服务;
2、负责上门安装;
3、免费提供技术支持。
四、其他
请提供单位资质文件、业绩案例、技术方案等。
航海仪器-第4节 船用计程仪
21
航海仪器(电)
17
三、声相关计程仪
一、测速原理
航海仪器(电)
18
三、声相关计程仪
一、测速原理
航海仪器(电)
19
三、声相关计程仪
一、测速原理
s 1 s 2 v 2 v
1 s v 2
航海仪器(电)
20
三、声相关计程仪
二、特点
测速精度与声速无关; 可兼作测深仪使用。
航海仪器(电)
(4)可以兼测水深。
2.整机框图及工作过程:
图7-8
3.主显示器面板介绍:
Distance
Keel Clearance
Distance MODE Keel MODE Clearance Keel Clearance
Distance
DIMMER
UNIT
SET
POWER
图7-9
三、声相关计程仪
一、定义 是应用相关技术处理水声信 息,测量船舶航速并累计航程 的一种水声导航仪器
(二)DS-50型多普勒计程仪简介: 1.主要特点: (1)可工作于“ 海底跟踪”、“海层 跟踪”和“自动跟踪”三种工作方式 。
(2)能同时测量船舶纵向前、后及横移 速度 。 (3)浅水(最小达到船底下1m)测量也有较 高的测量精度;在1~200m的水深范围内可精 测对地的速度,超过200m则计程仪自动转换 为测量对水的速度 。
f0 vcos v
2、(2)双波束多普勒计程仪
双波束多普勒计程仪的测速原理
f f F f A
2 f 0 v cos 2 f 0 v cos c c 4 fv cos 0 c
f0 v
船速与航程
140 130 120 14.2 13.2 12.3 14.8 14.0 13.0 90 80 70 9.4 8.3 7.4 10.1 9.4 8.5
110
100
11.4
10.4
12.4
11.5
60
50
6.5
5.5
7.7
6.6
6
在船速校验线上测定船速
船速校验线(测速场)
一般设在一些重要港口附近的测速场上,船速校验线一般由 三对横向叠标加一对导航叠标构成。
相对计程仪(Relative Log) 绝对计程仪(Absolute Log)
相对计程仪——通常对水 (拖曳、转轮、水压、电磁等) 绝对计程仪——对地 (多普勒、声相关等)
1)相对计程仪 只能显示船舶相对于水的航程和速度,即它只记录风影响 后的速度VL和航程SL,而不能记录水流对船舶的影响。
―计风不计流”
船速校验线应具备的条件:
①船速校验线的长度适当。
一般测定18kn以下船, 用1-2n mile长的测速线, 18kn以上船,用2-3n mile 长的测速线
7
②船速校验线上的水深足够 (水深h≥满载吃水T的2倍); ③在船速校验线的两端,应该有开阔的旋回余地; ④测速线应能避风浪,水流较小; ⑤测速线附近应确保不存在危险物,而且助航标志易于辨认; 测定船速的计算公式为 VE
航海仪器第六章AIS

自动识别系统:一定范围,规定频率(基于VHF), 船-岸、船-船互通信息
( AIS —— Automatic Identification System )
《 SOLAS 公约》
航行于国际航线 300 总吨以上船舶和公约国航 行于国内航线的 500 总吨以上的船舶,自 2002 年7 月 1 日到 2008 年7 月 1 日分段配备 AIS 设备。
3. AIS 的时间标准 混合定时,采用UTC或其他相关时间作为标准。 (同步方法见 P148)
可编辑ppt
8
七、AIS 的工作模式
1. 自主(autonomous)工作模式: 按照自身程序发送信息,所有海域连续
2. 指定(assigned)工作模式: 按照指定方案发送信息,拥挤海域
3. 轮询(polled)工作模式: 在管理当局或它船询问时发送信息
可编辑ppt
1
二、AIS 的主要功能
VTS 报告信息
VTS 报告信息
互通信息
避碰信息
可编辑ppt
2
1. 自动连续地与主管部门、岸台、其他船舶和 飞行器进行自动识别信息(静态、动态信息、 安全信息)的发射和接收。
2. 向主管部门、其他船舶及时提供船位和操纵 信息,便于精确地跟踪和监视船舶动态。
AIS 系统可实现:
87b161975mhz88b162025mhz四ais基站发射频率每个ais站均同时在两个频道上收发不能使用地区必须由dsc70接收信息来转换通道ais可在规定的vhf频段工作五ais的无线传输要求p147可编辑ppt六ais发射格式stdma自组织时分多址技术各船台和岸台使用同一频率按时间分隔信号互不干扰ais信号发射格式信息电文1min1帧划分为22502667ms256bit每个船位报告占用一个时隙其他类型报文可超每分钟处理2000个以上报告数据更新1次2秒ais的时间标准混合定时采用utc或其他相关时间作为标准
船用多普勒计程仪

船用多普勒计程仪
李建兵
【期刊名称】《舰船论证参考》
【年(卷),期】1996(000)003
【摘要】船用多普勒计程仪是一种适用并得到迅速发展的新型计程仪,它具有测速精度高并可相对于海底的绝对速度的特点。
本文从船用多普勒计程仪的一般原理入手,对它与组合导航系统的关系,它在组合导航系统中的作用,它的速度值的校正以及它的检验方法的一般原则和检验条件等几方面做了阐述。
【总页数】5页(P73-77)
【作者】李建兵
【作者单位】不详;不详
【正文语种】中文
【中图分类】U666.152
【相关文献】
1.船用多普勒计程仪误差分析 [J], 阳跃图
2.船用多普勒计程仪系统的计算机控制研究 [J], 任茂东;陈铎
3.船用计程仪信号设备的虚拟检测技术系统设计 [J], 蒋从元
4.安装方式对船用多普勒计程仪性能的影响分析 [J], 陈敏康
5.船用多普勒计程仪测速精度分析 [J], 陈传坎
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第七章船用计程仪第一节概述船用计程仪是一种测量船舶航速和累计航程的导航仪器。
计程仪所提供的航速信息对船舶驾驶极为重要,其主要作用如下:1.计程仪测量的航速信息结合陀螺罗经或磁罗经提供的航向信息,可进行船舶船位推算。
2.向卫星导航仪、自动综合导航仪、ARPA和真运动雷达等导航仪器提供航速信息,可实现船舶自动定位和利于船舶操纵及自动避让。
3.向现代化大型或超大型船舶提供纵向和横向速度信息,保证这些船舶在狭水道航行、靠离码头和锚泊时的安全。
船用计程仪按其测量参考坐标系的不同,可分为相对计程仪和绝对计程仪两类。
相对计程仪只能测量船舶相对于水的速度并累计其航程,如水压式、电磁式等计程仪。
绝对计程仪可以测量船舶对地的速度并累计其航程,如多普勒计程仪和声相关计程仪。
但是当测量水深超过其跟踪深度范围时,绝对计程仪便转换成为跟踪水层的相对计程仪。
具体地讲,工作于“海底跟踪”方式的多普勒、声相关计程仪属于绝对计程仪,工作于“水层跟踪”方式的多普勒、声相关计程仪属于相对计程仪。
水压式计程仪是第二次世界大战后,应用流体力学的伯努利定理制成的,即船舶航行时的水流动压力与航速平方成正比的原理。
这种计程仪在中高速测速时精度较高,但在低速测量时精度和灵敏度均较差,而且其操作维护也不方便,已基本被淘汰。
电磁计程仪是应用电磁感应原理来测量船舶相对于水的航速和累计其航程的。
其优点是测速线性好,测速范围大,而且可测量船舶后退速度,精度较高(1%~2%或0.2Kn),成本低且使用方便。
因此,这种型号的计程仪目前在船舶上得到了普遍的使用。
典型的如国产的CDJ型、日本的EML型、法国的BEN型等。
多普勒计程仪是20世纪70年代初期的产品,它是随着航运事业的发展,为了解决某些大型、超大型船舶的进出港、靠离码头和锚泊等问题而制成的。
这种计程仪是利用声波的多普勒效应进行测速的,它可以提供船舶相对于海底的绝对航速和航程信息,同时还可以测量船舶后退及船首尾横移速度。
它具有测速精度高(0.2%~0.5%或0.1Kn),测速门限低(0.01Kn)等优点。
其典型产品如美国的SRD-331型,德国的ATLAS DOLOG20系列,日本的TD-501型、MF-100型和国产的MCDL-1型等。
声相关计程仪是于20世纪70年代中期问世的产品,它是利用相关技术对声波信号进行处理来测速的,其特点是测速精度高(0.2%或0.1Kn),测量精度不受海水中声速变化的影响,它可测速计程,还可兼作测深仪使用。
其典型产品有瑞典的SAL-ACCOR型、SAL-R1型和SAL-865型等。
第二节电磁计程仪一、电磁传感器的工作原理:电磁计程仪(electromagnetic log )是利用电磁感应原理来测量船舶航速和累计航程的一种相对计程仪。
电磁传感器是根据电磁感应原理,产生一个与船舶速度成正比的电信号。
常用的传感器有两种:平面式和导杆式。
平面式传感器的底面与船底平齐;导杆式传感器为一根可升降的圆柱形导杆,计程仪工作时伸出船底,不工作时可将导杆升起。
平面式电磁传感器的结构原理图如图7-1所示:倒“山”字型铁芯沿船舶横向安装在船底板开孔处。
铁芯的中间柱上绕有激磁绕组;在铁芯的两个空隙中嵌有间距为L 的两个电极a 和b 及其引出导线;电极和导线用非导磁材料填封并固定。
当激磁绕组通入220V50Hz 的交流电E~时,在铁芯两侧形成交变磁场B~。
当船以航速V 向前(或向后)航行时,则水流相对船的速度V 大小相等,方向相反。
由于海水可导电,可将流过两电极间的海水看作无数根运动的“导体”在切割磁力线,根据电磁感应原理,在电极a 、b 和海水形成的回路中将产生感应电动势Eg :)(10~B 8v Lv E g -∙= (7-1)式中,B~为交流磁感应强度(Gs ),L 为两电极间距(cm ),V 为航速(cm/s )。
显然,只要测得感应电动势Eg ,由上式即可求出船舶航速V 。
二、CDJ-6型电磁计程仪的使用与调整CDJ-6型电磁计程仪是由上海船舶仪器设备厂生产的,其设备组成主要有平面式传感器、接线盒﹑主机和航速表等,如图7-2所示:图7-1B~接线指示表速指示表图7-21.整机性能参数测速范围:-5~+25Kn航程范围:0~999,99.99n mile航速精度:±0.15Kn航程精度:±1%功耗: 80VA电源: 220VAC±10%,50Hz±6%2.使用主要的操作功能键位于主机的面板之上,见图7-3所示:(1)接通主机面板上的电源(Power)开关,指示灯亮,仪器开始工作。
仪器将显示三位的速度数据××·×(节);速度为负值时,显示-××·×(节)。
同时仪器还显示上次关机时存储的七位航程数(2)先按时间常数键T(TIME),再同时按下清零键C(CLEAR),航程清零,仪器将重新开始累计航程。
(3)按存储键MEM图7-3(MEMORY ),可将此时的航程数值存储在EPROM 中。
关机后,该值仍将长久保存,开机后,仪器即显示该值。
(4)递增键INC (INCREASE )和递减键DEC (DECREAS ):按递增键(或递减键),预置航程将不断增加(或减少)0.01海里,松开即停。
(5)自检键BIT (BUILT-IN TEST ):检查各功能键是否正常,按下此键,数码管依次显示从0到9,然后7个功能键指示灯轮亮一次后回到正常显示功能。
(6)亮度键B (BRIGHTNESS ):控制数码管显示亮度,以适应白天、黑夜航行时不同的亮度要求。
键指示灯有暗、橙、绿、红四种指示分别表示四级亮度显示。
3.维护(1)CDJ-6型计程仪平时维护只需注意保持清洁,避免灰尘。
(2)船舶坞修时,可检查传感器平面和电极,如发现传感器平面或电极表面附有污层时,应用肥皂水或四氯化碳洗净之。
如有海生物,应去除干净,但要注意不得损伤表面橡胶。
(3)定期检查安装传感器舱室内有无积水,发现后应及时处理。
4.叠标测速与航速误差 计程仪指示航速与船舶实际航速不一致,计程仪即产生航速误差。
航速误差的测定与校正必须在叠标测速场进行。
图7-4为船舶在测速场中测速的示意图,设陆地上的叠标aa ′和bb ′是平行的,其距离S 和方位已知,测速时,船舶航向AB 垂直于aa ′和bb ′。
显然,只需记录船舶每一次从A 点到B 点所需时间,便可求出船舶的实际航速Vz 。
计程仪测速应分低、中、高三种航速进行,为消除水流影响,各种航速应往返三次测量,连续三次记下船舶通过第一组和第二组叠标线的时间,求得三个实际航速V1、V2、V3,同时记录三次的计程仪的指示航速V J1、 V J2 和V J3,于是可求得船舶实际航速的平均值V 和计程仪显示航速的平均值V J 。
42;42321321J J J J V V V V V V V V ++=++=(7-2)计程仪的航速误差为:Z J V V V -=∆ (7-3) 计程仪测速的相对误差δV 由下式确定:图7-4%100⨯-=ZZJ V V V V δ (7-4)经过上述的测速和计算,若∣△V ∣大于0.15节时须进行误差校正。
第三节 多普勒计程仪一、多普勒效应多普勒计程仪(Doppler log )是应用多普勒效应进行测速和累计航程的一种水声导航仪器。
所谓的多普勒效应是指:当声源与接收者之间存在相对运动时,接收者接收到声波的频率与声源频率不同的现象。
当声源与接收者接近时,接收者收到声波的频率将升高;当两者相互远离时,则接收者收到声波的频率将降低。
接收频率与声源频率之差值△ƒ称为多普勒频移(Doppler shift )。
△ƒ与声源的频率ƒ0、声波在介质中的传播速度C 和声源与接收点之间的相对运动速度V 的关系如下:0f CVf =∆ (7-5) 当ƒ0与C 为常数时,△ƒ与V 成正比,因此可以通过测定多普勒频移来进行测速。
二、单波速测速原理如图7-5所示,在船底部装置一个收、发兼用的换能器O 。
船舶以速度V 向前航行,换能器以频率ƒ0向海底发射超声波脉冲。
声波束的发射方向与船舶速度方向成θ角,称之为波束发射俯角,一般θ取60°。
换能器向海底发射的超声波经海底发射后,一小部分声波能量被换能器接收。
换能器O 既是声源又是接收者,由于发射点和接收点之间有相对位移,故换能器O 收到声波的频率和发射声波的频率并不相同(又称为二次多普勒效应)。
测得的多普勒频移△ƒ表示如下:)67(cos 20-=∆CV f f θ式中,声波发射频率ƒ0、船速V 及波束俯角θ均为已知量,只要测出多普勒频移△ƒ,即可求出船速。
三、双波速测速原理上述是一种只向前发射单一声波束的多普勒计程仪。
这种单波束计程仪在实际使用时会因船舶摇摆而产生测速误差,故不能得到广泛的应用。
船舶摇摆时,由于船舶上下颠簸和纵向摇摆会产生船舶在垂直方向上的运动速度U ,如图7-6所示。
图7-6图7-7图7-5垂向速度U 在波束发射方向上的分量为–U sinθ,在波束发射方向上的合成速度为(V cosθ-Usinθ),则单波束多普勒频移公式变化为:)77()sin cos (20--=∆CU V f f θθ比较式7-6和7-7可知,在船舶上下颠簸和纵向摇摆时,如果仍按7-6式进行测速计算,显然会产生测量误差。
为了消除这种测量误差,目前船用多普勒计程仪普遍采用双波束系统测速,即以相同的发射俯角分别向前和向后发射对称的超声波波束,如图7-7所示。
按式7-7,朝船首向及船尾向波束的多普勒频移分别为:)87()sin cos (2)sin cos (20201---=∆-=∆CU V f f CU V f f θθθθ用Δƒ1减去Δƒ2有:)97(cos 421-=∆-∆=∆CV f f f θ式7-9称为双波束多普勒频移公式,由公式可知,船舶摇摆颠簸引起的垂向运动速度U 的影响已完全被消除。
四、多普勒计程仪的分类目前船用多普勒计程仪有三种类型。
第一种类型是双波束系统,又称一元多普勒计程仪。
它只能测量船舶纵向速度并累计其航程,通常用于船舶的导航功能;第二种类型是四波束系统,即换能器向船体的前后左右四个方向发射波束,又称二元多普勒计程仪。
它除了可测量船舶纵向速度外,还能测量横向速度,可作为船位推算导航使用。
一元和二元多普勒计程仪的换能器均安装在船首部位。
第三种类型是六波束系统,它除了在船首装置四波束换能器外,还在船尾部安装一对向船尾左右方向发射波束的换能器,它又称为三元多普勒计程仪。
这种计程仪既可测量船舶纵向速度,又能测量船首部和船尾部的横向速度,能反映船舶运动的全貌,通常用于大型或超大型船舶的进出港、靠离码头和锚泊等作业中,可确保航行的安全。