动态规划求最短旅行路线
动态规划求最短路径的两种方法
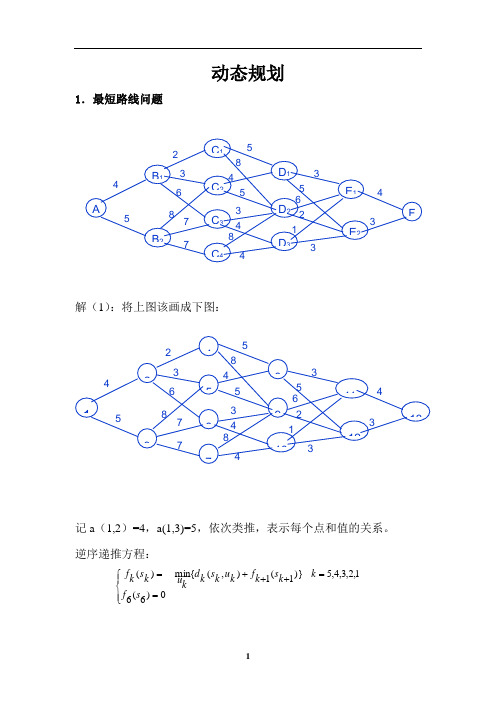
动态规划1.最短路线问题解(1):将上图该画成下图:记a (1,2)=4,a(1,3)=5,依次类推,表示每个点和值的关系。
逆序递推方程:⎪⎩⎪⎨⎧==+++=0)6(61,2,3,4,5)}1(1),({min )(s f k k s k f k u k s k d k uk s k fAB 1B 2C 1 C 2C 3 C 4D 1D 2 D 3E 1 E 2F4523 6 8 7 75845348435 6 2 314 31234 5 6 789 101112134523 6 8 7 7584534 8435 6 2 314 3如图各状态:逆序递推,找出上一个状态到下一阶段的最小路径值。
例如,当K=4时,状态 它们到F 点需经过中途 点E ,需一一分析从E 到 F 的最短路:先说从D1到F 的最短路 有两种选择:经过 E1, E2, 比较最短。
这说明由 D1 到F 的最短距离为7,其路径为AB 1B 2C 1 C 2C 3 C 4D 1 D 2 D 3E 1 E 2F4523 6 87 75845348435 62 31 4 3第1阶段 第2阶段 第3阶段 第4阶段 第5阶段状态 1状态 2状态3状态 4状态 5状态 6)}(),(),(),(m in{)(252141511414E f E D d E f E D d D f ++=.7}35,43min{=++=.11F E D →→},,{3214D D D S =a=[0,4,5,inf,inf,inf,inf,inf,inf,inf,inf,inf,inf 4,0,inf,2,3,6,inf,inf,inf,inf,inf,inf,inf 5,inf,0,inf,8,7,7,inf,inf,inf,inf,inf,inf inf,2,inf,0,inf,inf,inf,5,8,inf,inf,inf,inf inf,3,8,inf,0,inf,inf,4,5,inf,inf,inf,inf inf,6,7,inf,inf,0,inf,inf,3,4,inf,inf,inf inf,inf,7,inf,inf,inf,0,inf,8,4,inf,inf,inf inf,inf,5,4,inf,inf,inf,0,inf,inf,3,5,inf inf,inf,inf,8,5,3,8,inf,0,inf,6,2,inf inf,inf,inf,inf,inf,4,4,inf,inf,0,1,3,inf inf,inf,inf,inf,inf,inf,inf,3,6,1,0,inf,4 inf,inf,inf,inf,inf,inf,inf,5,2,3,inf,0,3 inf,inf,inf,inf,inf,inf,inf,inf,inf,inf,4,3,0]; s8=min(a(8,11)+a(11,13),a(8,12)+a(12,13)); s9=min(a(9,11)+a(11,13),a(9,12)+a(12,13)); s10=min(a(10,11)+a(11,13),a(10,12)+a(12,13)); s4=min(a(4,8)+s8,a(4,9)+s9); s5=min(a(5,8)+s8,a(5,9)+s9); s6=min(a(6,9)+s9,a(6,10)+s10); s7=min(a(7,9)+s9,a(7,10)+s10); s2=[a(2,4)+s4,a(2,5)+s5,a(2,6)+s6]; s2=min(s2);s3=[a(3,5)+s5,a(3,6)+s6,a(3,7)+s7]; s3=min(s3);s1=min(a(1,2)+s2,a(1,3)+s3)运行结果为:s8 = 7 s9 = 5 s10 = 5 s4 = 12 s5 = 10 s6 = 8 s7 = 9 s2 =13s3 = 15 s1 = 17结果分析:s 表示每个点到终点的最短距离,那么最短路程为17。
多地点的最短路径算法

多地点的最短路径算法多地点最短路径算法是指在多个起点和多个终点之间寻找最优路径的算法。
在实际应用中,例如GPS导航系统和物流配送等领域,多地点最短路径算法具有重要的应用价值。
本文将介绍几种用于解决多地点最短路径问题的算法,包括Dijkstra算法、Floyd算法和A*算法。
1. Dijkstra算法Dijkstra算法是一种基于贪心策略的最短路径算法,广泛应用于图形问题中。
它的基本思想是不断扩展距离最短的节点,直到求得所有节点的最短路径。
在多地点最短路径问题中,可以将起点按顺序逐一添加到集合中,然后针对每个起点运行Dijkstra算法,最终得到每个终点的最短路径。
2. Floyd算法Floyd算法是一种动态规划算法,可以求出从任一起点到任一终点的最短路径。
它通过记录任意两个节点之间经过的中间节点,并计算出经过这些中间节点的最短路径长度。
在多地点最短路径问题中,可以构建一个权重矩阵,矩阵中的每个元素代表两个节点之间的距离,然后运行Floyd算法,最终得到每个起点到每个终点的最短路径。
3. A*算法A*算法是一种启发式搜索算法,它在搜索过程中利用信息启发式函数来预估从当前节点到目标节点的路径成本,以便更快地找到最短路径。
在多地点最短路径问题中,可以将每个起点作为初始节点,每个终点作为目标节点,然后运行A*算法,最终得到每个起点到每个终点的最短路径。
总结在多地点最短路径问题中,Dijkstra算法、Floyd算法和A*算法都可以用来寻找最优路径。
Dijkstra算法适用于较小的问题,而且算法复杂度为O(n²),适用于稠密图。
Floyd 算法适用于较大的问题,复杂度为O(n³),适用于稀疏图。
A*算法可以在比较短时间内找到近似最优解,但在处理复杂的问题时速度较慢。
根据实际应用的具体要求,可以选择适合的算法。
最短路径的七种类型

最短路径的七种类型
嘿,朋友们!咱今儿来聊聊最短路径的七种类型,这可有意思啦!
你看啊,就好比你要去一个地方,你肯定想走最快最省力的路吧。
这最短路径就像是你找路的指南。
第一种呢,就像是笔直的大道,一眼就能看到头,简单直接,没有弯弯绕绕,这就是单源最短路径。
你从一个点出发,直直地奔向目标,中间不拐弯抹角。
第二种呢,有点像走迷宫,但是有了特殊的方法让你能最快找到出口,这就是所有点对最短路径。
就好像你要把迷宫里每一个点到其他点的最短路径都搞清楚。
第三种啊,像那种有很多条路都能到目的地,但你得挑出最短的那条,这就是动态规划最短路径。
得好好算计一下,可不能瞎走。
第四种呢,就好像在一个大网里找路,要考虑好多好多的线和点,这就是网络流中的最短路径。
第五种,好比在一群乱麻中找最顺的那根线,这就是图论中的最短路径。
第六种,像是有很多障碍,但你得巧妙地绕过去找到最短的路,这就是带权图最短路径。
第七种,就像在一个复杂的世界里,找一条最快捷的通道,这就是多阶段决策最短路径。
你说这七种类型是不是很有趣?它们就像是生活中的各种选择,有时候我们要找到最快捷的方式去达成目标。
想想看,要是我们在生活中也能像找到最短路径一样,迅速地做出最好的选择,那该多好啊!
所以啊,朋友们,了解了这些最短路径的类型,咱以后做事就更有方向啦!别再瞎碰瞎撞啦,找对路,走得快,才能更好地迎接生活的挑战呀!咱可得把这些好好记住,说不定啥时候就派上用场啦!。
动态规划实现最短路径问题

动态规划实现最短路径问题⼀、设计最短路径的动态规划算法 <算法导论>中⼀般将设计动态规划算法归纳为下⾯⼏个步骤: 1)分析最优解的结构 2)递归定义最优解的值 3)⾃底向上计算最优解的值 4)从计算的最优解的值上⾯构建出最优解⼆、最短路径的结构 从最优解的结构开始分析(我们假设没有权值为负的路径),对于图G<V,E>的所有结点对最短路径的问题,我们能知道⼀条最短路径的⼦路径都是最短路径。
假设⽤邻接矩阵W=w(ij)来表⽰输⼊带权图,考虑从结点i到结点j的⼀条最短路径p,如果p最多有m(m为有限值)条边。
若i=j,则p的权值为0⽽且不包含其他边。
若i ≠ j,可以将i到j的路径转换为i -> k、k->j。
三、⼀个给定的图 1)给定⼀个有向图 2)我们可以给出这个有向图的邻接矩阵四、C++实现1 #include <iostream>2 #include<fstream>3 #include<sstream>4 #include<vector>5 #include<string>6using namespace std;7const int Max_Num = 100;89 typedef struct Point {10int n; //点的个数11double p[Max_Num];12double q[Max_Num];13int root[Max_Num][Max_Num];14double w[Max_Num][Max_Num];15double e[Max_Num][Max_Num];16 }Point;1718 vector<Point> points;19 vector<string> res;20 vector<int> num;2122void file_read();23void createPoint();24void optimalBST();25void printRoot(Point P);26void printOptimalBST(int i, int j, int r, Point P, ofstream &fileWrite);27 template <class Type>28 Type stringToNum(const string& str) {29 istringstream iss(str);30 Type num;31 iss >> num;32 iss.str("");33return num;34 }3536void file_read() {37string str2, str1 = "", result;38 ifstream fileRead("in.dat");39if (fileRead.is_open()) {40while (getline(fileRead, str2, '\n')) {41if (str2.find("") != -1) {42 str1.append(str2 + "");43 }44else {45 num.push_back(stringToNum<int>(str2));46if (str1 != "") {47 res.push_back(str1);48 }49 str1 = "";50 }51 }52 res.push_back(str1);53 fileRead.close();54 }55 }5657void createPoint() {58string temp;59 Point P;60for (int i = 0; i < res.size(); i++) {61 vector<string> temp_str; //存放按照空格分开后的数字62int n = num[i];63 stringstream input(res[i]);64while (input >> temp) {65 temp_str.push_back(temp);66 }67 P.n = n;68for(int k = 0; k<=n; k++) P.p[k] = stringToNum<double>(temp_str[k]);69for(int k = n + 1; k<temp_str.size(); k++) P.q[k-(n+1)] = stringToNum<double>(temp_str[k]);70 points.push_back(P);71 }72 }7374//根据书上的伪代码:接收概率列表p1....pn和q0.....qn以及规模n作为输⼊计算出e和root75void optimalBST(){76 Point P;77for(int i = 0; i<res.size(); i++) {78 vector<string> temp_str; //存放按照空格分开后的数字79int n = num[i];80string temp;81 stringstream input(res[i]);82while (input >> temp) {83 temp_str.push_back(temp);84 }85 P.n = n;8687for(int k = 0; k<=n; k++) P.p[k] = stringToNum<double>(temp_str[k]);88for(int k = n + 1; k<temp_str.size(); k++) P.q[k-(n+1)] = stringToNum<double>(temp_str[k]); 8990//初始化只包括虚拟键的⼦树91for (int i = 1;i <= P.n + 1;++i){92 P.w[i][i-1] = P.q[i-1];93 P.e[i][i-1] = P.q[i-1];94 }95//由下到上,由左到右逐步计算96for (int len = 1;len <= P.n;++len){97for (int i = 1;i <= P.n - len + 1;++i){98int j = i + len - 1;99 P.e[i][j] = Max_Num;100 P.w[i][j] = P.w[i][j-1] + P.p[j] + P.q[j];101//求取最⼩代价的⼦树的根102for (int r = i;r <= j;++r)103 {104double temp = P.e[i][r-1] + P.e[r+1][j] + P.w[i][j];105if (temp < P.e[i][j])106 {107 P.e[i][j] = temp;108 P.root[i][j] = r;109 }110 }111 }112 }113 points.push_back(P);114 }115 }116117void printOptimalBST(int i, int j, int r, Point P, ofstream &fileWrite){118int root_node = P.root[i][j];//⼦树根节点119if (root_node == P.root[1][P.n]){120//输出整棵树的根121 fileWrite << "k" << root_node << "是根" << endl;122 printOptimalBST(i, root_node - 1, root_node, P, fileWrite);123 printOptimalBST(root_node +1 , j, root_node, P, fileWrite);124return;125 }126127if (j < i - 1){128return;129 }else if (j == i - 1){//遇到虚拟键130if (j < r)131 fileWrite << "d" << j << "是" << "k" << r << "的左孩⼦" << endl;132else133 fileWrite << "d" << j << "是" << "k" << r << "的右孩⼦" << endl;134return;135 }136else{//遇到内部结点137if (root_node < r)138 fileWrite << "k" << root_node << "是" << "k" << r << "的左孩⼦" << endl; 139else140 fileWrite << "k" << root_node << "是" << "k" << r << "的右孩⼦" << endl; 141 }142 printOptimalBST(i, root_node - 1, root_node, P, fileWrite);143 printOptimalBST(root_node + 1, j, root_node, P, fileWrite);144 }145146//输出最优⼆叉查找树所有⼦树的根147void printRoot(Point P){148 cout << "各⼦树的根:" << endl;149for (int i = 1;i <= P.n;++i){150for (int j = 1;j <= P.n;++j){151 cout << P.root[i][j] << "";152 }153 cout << endl;154 }155 cout << endl;156 }157158int main(){159 file_read();160 optimalBST();161 ofstream fileWrite("out.dat");162 Point P ;163for(int i = 0; i<points.size(); i++) {164 P = points[i];165 printRoot(P);166 printOptimalBST(1,P.n,-1, P, fileWrite);167 }168 fileWrite.clear();169return0;170 } 上述代码是将给定的邻接矩阵从⽂件中读取 然后根据输⼊的邻接矩阵求出最短路径。
算法论文:旅行商问题的求解方法(动态规划法和贪心法)讲解

旅行商问题的求解方法摘要旅行商问题(TSP问题)时是指旅行家要旅行n个城市然后回到出发城市,要求各个城市经历且仅经历一次,并要求所走的路程最短。
该问题又称为货郎担问题、邮递员问题、售货员问题,是图问题中最广为人知的问题。
本文主要介绍用蛮力法、动态规划法、贪心法和分支限界法求解TSP问题,其中重点讨论动态规划法和贪心法,并给出相应求解程序。
关键字:旅行商问题;动态规划法;贪心法;分支限界法1引言旅行商问题(TSP)是组合优化问题中典型的NP-完全问题,是许多领域内复杂工程优化问题的抽象形式。
研究TSP的求解方法对解决复杂工程优化问题具有重要的参考价值。
关于TSP的完全有效的算法目前尚未找到,这促使人们长期以来不断地探索并积累了大量的算法。
归纳起来,目前主要算法可分成传统优化算法和现代优化算法。
在传统优化算法中又可分为:最优解算法和近似方法。
最优解算法虽然可以得到精确解,但计算时间无法忍受,因此就产生了各种近似方法,这些近似算法虽然可以较快地求得接近最优解的可行解,但其接近最优解的程度不能令人满意。
但限于所学知识和时间限制,本文重点只讨论传统优化算法中的动态规划法、贪心法和分支限界法,并对蛮力法做简单介绍,用以比较。
2正文2.1蛮力法2.1.1蛮力法的设计思想蛮力法所依赖的基本技术是扫描技术,即采用一定的策略将待求解问题的所有元素一次处理一次,从而找出问题的解。
一次处理所有元素的是蛮力法的关键,为了避免陷入重复试探,应保证处理过的元素不再被处理。
在基本的数据结构中,一次处理每个元素的方法是遍历。
2.1.2算法讨论用蛮力法解决TSP问题,可以找出所有可能的旅行路线,从中选取路径长度最短的简单回路。
如对于图1,我们求解过程如下:(1)路径:1->2->3->4->1;路径长度:18;(2)路径:1->2->4->3->1;路径长度:11;(3)路径:1->3->2->4->1;路径长度:23;(4)路径:1->3->4->2->1;路径长度:11;(5) 路径:1->4->2->3->1;路径长度:18;(6) 路径:1->4->3->2->1;路径长度:18;从中,我们可以知道,路径(2)和(4)路径长度最短。
动态规划 运筹学 例题
动态规划运筹学例题动态规划是运筹学中常用的一种优化技术,它利用规划、三角函数和其他数学技术来解决日常生活中的各种问题,比如最优路线问题、最优资源分配问题、最优出行路线问题等。
本文将通过一个例题,来介绍动态规划的基本思想,以及如何利用动态规划来解决问题。
例题一:已知一条路线,由A点到B点,有N个途经的节点,每个节点之间的距离已知。
求从A到B的最短路线。
按照动态规划的思想,首先将该问题分解为若干个子问题,并根据子问题的解来解决原问题,这种分解和解决问题的方式称为动态规划。
对于上面的问题,可以将其分解为N个子问题,分别是从A到第1个节点、从第1个节点到第2个节点、从第2个节点到第3个节点,以此类推,最后一个子问题是从第N-1个节点到B点的最短路程。
将上面的N个子问题中,从第i个节点到B点的最短路程记为d[i],由于从第i个节点到B点可能经过i+1、i+2、……、N-1节点,因此要找到d[i],只需要找到经过i+1、i+2、……、N-1节点的最短路程即可,即求d[i]=Min{d[i+1]+length[i][i+1],d[i+2]+length[i][i+2],…,d[N-1]+length[i][N-1]},其中length[i][j]是第i个节点到第j个节点的距离。
以上就是动态规划的解题步骤,它能将原问题分解成若干个子问题,并找到最优解。
对于本例来说,通过上述步骤,就可以得到从A 到B的最短路程。
这种分解和求解问题的方法是动态规划,可以用来解决许多类似的问题,如:1)最优路线问题;2)旅行推销员问题;3)硬币找零问题。
动态规划的一大特点是,他能很好地将问题分解为多个子问题,并能从子问题的解中求解出最优解。
总之,动态规划是一种很有用的优化技术,它可以有效解决各种运筹学问题。
它不仅可以帮助我们解决许多具体问题,而且还能使我们更好地理解问题及其解法。
动态规划求解TSP问题

f5(i, )=min{Cij+f6(1, )}=Ci1, d5(i, 1), i=2, 3, 4, 5 f5(i, )的值列表如下:
1
i 2
f5(i, ) 2
5 3
5 1 2 7
2
2 3 3
3
4 5
7
2 5
6
4 4
5
7
对于k=4, 有
f4(i, S4)=min{Cij+f5(j, S5)}, jS4, f4(i, S4。并且有 xn=(i, ), i=2, 3, …, n,
xn+1=(1, )
4
动态规划模型构造
决策变量:dk=(i, j), 其中i为当前所在的城市, j为下一站将要到达的城市。 状态转移方程:若当前的状态为 xk=(i, Sk) 采取的决策为 dk=(i, j) 则下一步到达的状态为 xk+1=T(xk, dk)=(j , Sk\{j})
9
(i, S3) (2, {3, 4}) (2, {3, 5})
J {3} {4} {3} {5}
Cij 3 5 3 1
S4 {4} {3} {5} {3}
Cij+f4(j, S4) 3+f4(3, {4})=3+6=9* 5+f4(4, {3})=5+11=16 3+f4(3, {5})=3+11=14* 1+f4(5, {3})=1+13=14*
(1, S1) (1, {2, 3, 4, 5})
J {2} {3} {4} {5}
Cij 2 7 2 5
S2 {3, 4, 5} {2, 4, 5} {2, 3, 5} {2, 3, 4}
动态规划在最短路径问题中的应用
动态规划在最短路径问题中的应用动态规划是一种解决复杂问题的方法,它将问题分解成更小的子问题,并通过保存子问题的解来避免重复计算,从而提高解决问题的效率。
最短路径问题是在图或者网络中找到从起点到终点的最短路径的问题,可以使用动态规划算法来解决。
本文将介绍动态规划在最短路径问题中的应用及其算法实现。
一、最短路径问题在最短路径问题中,我们需要在图或网络中找到从一个节点到另一个节点的最短路径。
最短路径可以通过边的权重来衡量,权重可以表示距离、时间、代价等。
最短路径问题有多种变体,其中最常见的是单源最短路径和全源最短路径。
单源最短路径问题是在给定一个起点的情况下,找到该起点到其他所有节点的最短路径。
最常用的算法是Dijkstra算法和Bellman-Ford算法。
二、动态规划原理动态规划通过保存子问题的解来避免重复计算,从而提高算法的效率。
它将问题分解成更小的子问题,并使用递推关系来计算子问题的解。
在最短路径问题中,我们可以使用动态规划来计算从起点到每个节点的最短路径。
首先,我们定义一个一维数组dist[]来保存从起点到每个节点的最短路径长度。
初始化时,dist[]的值为无穷大,表示路径长度未知。
然后,我们从起点开始逐步计算每个节点的最短路径长度。
具体的动态规划算法如下:1. 初始化dist[]为无穷大,起点的dist[]为0。
2. 对于每个节点v,按照拓扑顺序进行如下操作:2.1. 对于节点v的所有邻接节点u,如果dist[v] + weight(v, u) < dist[u],则更新dist[u]。
2.2. 拓扑顺序可以根据节点的拓扑顺序进行计算或者使用深度优先搜索(DFS)算法。
三、算法实现下面是使用动态规划算法解决最短路径问题的示例代码:```// 定义图的邻接矩阵和节点个数int graph[MAX][MAX];int numNodes;// 定义dist[]数组来保存最短路径长度int dist[MAX];// 定义拓扑排序和DFS算法需要的变量bool visited[MAX];stack<int> s;// 动态规划算法求解最短路径void shortestPath(int startNode) {// 初始化dist[]数组为无穷大for (int i = 0; i < numNodes; i++) {dist[i] = INT_MAX;}dist[startNode] = 0;// 拓扑排序或DFS计算每个节点的最短路径长度 for (int i = 0; i < numNodes; i++) {if (!visited[i]) {DFS(i);}}// 输出最短路径长度for (int i = 0; i < numNodes; i++) {cout << "Node " << i << ": " << dist[i] << endl; }}// 深度优先搜索void DFS(int node) {visited[node] = true;for (int i = 0; i < numNodes; i++) {if (graph[node][i] != 0 && !visited[i]) {DFS(i);}}s.push(node);}```以上示例代码演示了使用动态规划算法求解最短路径问题的基本原理和步骤。
最短路径的数学模型

最短路径的数学模型最短路径的数学模型:从A到B的最短路径问题引言:在现实生活中,我们常常需要找到两个地点之间的最短路径,比如从家里到公司的最短路线,或者从一个城市到另一个城市的最短航线。
这种最短路径问题在数学中有一种通用的数学模型,被广泛应用于计算机科学、运筹学以及交通规划等领域。
本文将介绍这个数学模型,并通过一个具体的例子来说明其应用。
一、问题描述:最短路径问题可以被定义为:给定一个图G,其中包含一些节点和连接这些节点的边,每条边都有一个权重(或距离)值,我们希望找到从节点A到节点B的最短路径。
二、数学模型:为了解决最短路径问题,我们需要构建一个数学模型。
这个模型可以使用图论中的图和路径的概念来描述。
1. 图的定义:在最短路径问题中,图G可以被定义为一个由节点和边组成的集合。
其中节点表示地点或位置,边表示连接这些地点的路径。
每条边都有一个权重值,表示从一个地点到另一个地点的距离或成本。
2. 路径的定义:路径是指从一个地点到另一个地点经过的一系列节点和边的组合。
在最短路径问题中,我们希望找到一条路径,使得路径上所有边的权重之和最小。
3. 最短路径的定义:最短路径是指从节点A到节点B的路径中,路径上所有边的权重之和最小的路径。
三、最短路径算法:为了解决最短路径问题,我们需要使用一种算法来计算最短路径。
下面介绍两种常用的最短路径算法:Dijkstra算法和Floyd-Warshall算法。
1. Dijkstra算法:Dijkstra算法是一种贪心算法,用于计算带权重的图中节点A到其他所有节点的最短路径。
该算法的基本思想是从起始节点开始,依次选择与当前节点距离最近的节点,并更新到达其他节点的最短路径。
这个过程不断重复,直到找到从节点A到所有其他节点的最短路径。
2. Floyd-Warshall算法:Floyd-Warshall算法是一种动态规划算法,用于计算带权重的图中任意两个节点之间的最短路径。
该算法通过一个二维数组来存储节点之间的最短路径长度,并不断更新这个数组,直到找到所有节点之间的最短路径。
数学建模最佳旅游路线的选择模型优选资料

数学建模最佳旅游路线的选择模型优选资料在当今社会,旅游已经成为人们生活中不可或缺的一部分。
无论是为了放松身心、领略不同的风土人情,还是为了增长见识、丰富人生阅历,人们都热衷于踏上旅程。
然而,如何在众多的旅游景点中选择出一条最佳的旅游路线,成为了许多旅行者面临的难题。
这时候,数学建模就能够发挥出其强大的作用,为我们提供科学合理的决策依据。
数学建模是一种通过数学语言和方法来描述和解决实际问题的手段。
在旅游路线选择的问题上,数学建模可以帮助我们综合考虑各种因素,如景点的吸引力、交通便利性、旅行时间和费用等,从而找到最优的解决方案。
接下来,我们将介绍几种常见的用于选择最佳旅游路线的数学建模方法。
一、图论模型图论是数学的一个重要分支,它可以很好地应用于旅游路线的规划。
我们可以将旅游景点看作图中的节点,景点之间的道路看作图中的边,边的权重可以表示距离、时间或费用等。
通过图论中的算法,如最短路径算法(Dijkstra 算法、FloydWarshall 算法等),我们可以找到从起点到终点的最短路径,或者在一定限制条件下(如时间或费用预算)的最优路径。
例如,如果我们想要在有限的时间内游览尽可能多的景点,就可以使用最短时间路径算法来规划路线。
假设我们有 5 个景点 A、B、C、D、E,它们之间的距离和所需时间如下表所示:|起点|终点|距离(km)|时间(h)||::|::|::|::|| A | B | 50 | 1 || A | C | 80 | 15 || A | D | 120 | 2 || A | E | 100 | 15 || B | C | 60 | 1 || B | D | 90 | 15 || B | E | 70 | 1 || C | D | 70 | 1 || C | E | 50 | 05 || D | E | 80 | 1 |如果我们的时间限制为 5 小时,从景点 A 出发,那么通过 Dijkstra 算法可以计算出最优的游览路线为 A B E C D,总时间为 45 小时。
最短路径问题的求解PPT精选文档

.
3
最短路径问题的求解
三、等代价搜索法 等代价搜索法也是在宽度优先搜索的基础上进行了部分优化的一种算法,它与
启发式搜索的相似之处都是每次只展开某一个结点(不是展开所有结点),不同之 处在于:它不需要去另找专门的估价函数,而是以该结点到A点的距离作为估价值, 也就是说,等代价搜索法是启发式搜索的一种简化版本。它的大体思路是:
.
2
最短路径问题的求解
二、 启发式搜索 在宽度优先搜索算法的基础上,每次并不是把所有可展开的结点展开,
而是对所有没有展开的结点,利用一个自己确定的估价函数对所有没展开 的结点进行估价,从而找出最应该被展开的结点(也就是说我们要找的答 案最有可能是从该结点展开),而把该结点展开,直到找到目标结点为止。
.
12
最短路径问题的求解
八、Dijkstra算法(从一个顶点到其余各顶点的最短路径,单源最短路径) 例3、如下图,假设C1,C2,C3,C4,C5,C6是六座城市,他们之间的连线表示两 城市间有道路相通,连线旁的数字表示路程。请编写一程序,找出C1到Ci 的最短路径(2≤i≤6),输出路径序列及最短路径的路程长度。
3、由数轴可见,A与A'点相比,A点离原点近,因而保留A点,删除A'点,相应的,B、B'点保留B点, D、D'保留D',E、E'保留E',得到下图:
.
11
最短路径问题的求解
4、此时再以离原点最近的未展开的点B联接的所有点,处理后,再展开离原点最近未展开的D点, 处理后得到如下图的最终结果:
动态规划解决旅行商问题_附代码

1.问题基本描述:求一个旅行商经过N个城市最后回到出发点的最短路径.即,在一个无向带权图的邻接矩阵中,求一个最短环包括所有顶点.2.解法:1)动态规划:假设从顶点i出发,令d(i,V’)表示从顶点i出发经过V’中各个顶点一次且仅一次,最后回到出发点i的最短路径的长度,开始时,V’=V-{i},于是,旅行商问题的动态规划函数为:d(i,V’) = min{c ik + d(k,V’-{k})} (k∈V’)1)d(k,{}) = c ki (k ≠ i)2)简单来说,就是用递归表达:从出发点0到1号点,假设1是第一个,则剩下的路程就是从1经过剩下的点最后回到0点的最短路径. 所以当V’为空的时候, d(k,{}) = c ki (k ≠ i), 找的是最后一个点到0点的距离.递归求解1之后,再继续求V’之中剩下的点,最后找出min.如果按照这个思想直接做,对于每一个i都要递归剩下的V中所有的点,所以这样的时间复杂度就近似于N!,其中有很多重复的工作.可以从小的集合到大的集合算,并存入一个二维数组,这样当加入一个节点时,就可以用到之前的结果,如四个点的情况:动态填表:表中元素代表第i个节点经过V集合中的点最后到0点的最短值.如果有多个值,取其中最小的一个.这样一共循环(2^(N-1)-1)*(N-1)次,就把时间复杂度缩小到O(N*2)的级别.核心伪代码如下:{for (i =1;i<n;i++) //初始化第0列d[i][0]=c[i][0];for( j=1;j<2^(N-1)-1;j++)for(i=1 ; i<n ;i++){if(子集Vj中不包含i){对Vj中的每个元素k,计算d[i][Vj] = min{c[i][k] + d[k][{Vj-k}] | 每一个k∈Vj};}}对V[2^(n-1)-1]中的每个元素k,计算:d[0][2^(n-1)-1] = min{c[0][k] + d[k][2^(n-1)-2]};输出最短路径:d[0][2^(n-1)-1];}。
最短路径问题的动态规划算法

最短路径问题的动态规划算法最短路径问题的动态规划算法是一种常用的解决路径优化的方法。
动态规划算法的核心思想是将原问题拆分成若干个子问题,通过递推关系找到最优解。
在最短路径问题中,我们通常希望找到从起点到终点的最短路径。
首先,我们需要定义一个二维数组dp,其中dp[i][j]表示从起点到达坐标(i, j)的最短路径长度。
初始化dp数组,将起点的值设为0,其他位置的值设为无穷大(即表示不可达)。
接下来,我们需要确定动态规划的状态转移方程。
对于任意一个坐标(i, j),它可以从上方的坐标(i-1, j)、左方的坐标(i, j-1)、右方的坐标(i, j+1)、下方的坐标(i+1, j)四个位置中的某一个到达。
因此,可以得到状态转移方程如下:
dp[i][j] = min(dp[i-1][j], dp[i][j-1], dp[i][j+1], dp[i+1][j]) + 1
其中,min表示取其中的最小值。
通过以上状态转移方程,我们可以逐步更新dp数组,直到最终得到终点的最短路径长度。
需要注意的是,动态规划算法的时间复杂度通常是O(n^2),其中n 表示问题规模。
因此,在处理大规模最短路径问题时,需要考虑算法的效率,可能需要进行剪枝等优化操作。
总的来说,最短路径问题的动态规划算法在路径优化领域有着重要的应用价值,通过合理定义状态转移方程和优化算法效率,可以找到从起点到终点的最短路径长度,为路径规划提供有效的解决方案。
迪杰斯特拉算法

迪杰斯特拉算法迪杰斯特拉算法是一种用于在无向图或有向图中找到从一个节点到另一个节点的最短路径的算法,也称为最短路径算法。
它是由著名的科学家爱迪生发明的,后来被保罗迪杰斯特拉命名。
迪杰斯特拉算法是一种基于动态规划的算法,旨在在给定的有向图中找到最短路径。
它的主要特点是将一个大问题分成若干小问题,然后一个个地解决它们,最终获得最优解。
迪杰斯特拉算法的步骤如下:1.始化:根据图的拓扑构造表,确定出发节点和目的节点;2.算:从出发节点开始,逐一计算每个节点到目的节点的最短路径距离;3.踪:跟踪每个节点到目的节点的最短路径;4. 优化:检查每个节点的最短路径距离,如果存在更优的路径,则更新最短路径距离;5.成:当所有节点的最短路径距离都计算出来后,算法结束。
迪杰斯特拉算法虽然很简单,但是却非常有效,只要图是联通的,就能够找到每个节点到目的节点的最短路径,却不必考虑太多复杂性。
迪杰斯特拉算法可以用于许多领域,如交通和物流,电路设计,社会网络分析,计算机网络和银行的交易处理等。
例如,在交通和物流领域,迪杰斯特拉算法可以用来规划最佳路线,即找到从一个地点到另一个地点的最短路径,以便节省旅行时间并最大化出行费用。
对于物流行业,可以使用迪杰斯特拉算法来优化货物快递系统,可以利用它来规划最佳路线,以便尽可能快地将货物运输到指定地点。
此外,迪杰斯特拉算法还可以用于解决计算机网络中的路由问题,如在大型网络内如何转发信息,在多个回路之间如何寻找最短路径等。
它能够有效地处理小延迟和大延迟等不同类型的网络服务。
最后,迪杰斯特拉算法可以用作银行的结算系统,以最快的时间将款项从发件人转移到收件人,以最少的费用和最少的时间。
为此,迪杰斯特拉算法可以提供一种方便快捷的解决方案,通过此方法,可以有效地缩短支付时间,降低银行费用。
以上就是迪杰斯特拉算法的基本原理以及它的应用场景,它在我们的日常生活中发挥着重要的作用,是一种非常有效的算法,值得我们去学习和研究。
几种常用的最短路径算法

几种常用的最短路径算法在图论中,最短路径算法是解决许多实际问题的重要工具。
最短路径算法主要用于在加权图中查找两个节点之间的最短路径。
以下是几种常用的最短路径算法:1. Dijkstra算法Dijkstra算法是一种贪心算法,用于求解带权有向图中单源最短路径问题。
该算法从起点出发,逐步确定离起点最近的节点,并更新起点到其他节点的距离。
Dijkstra算法能够求解非负权重的最短路径,时间复杂度为O(V^2),其中V是图中节点的数量。
2. Bellman-Ford算法Bellman-Ford算法用于解决带负权边的单源最短路径问题。
该算法通过反复松弛边的方式逐渐找到最短路径。
Bellman-Ford算法可以处理带有负权边但没有负权环的图,时间复杂度为O(V·E),其中V是图中节点的数量,E是图中边的数量。
3. Floyd-Warshall算法Floyd-Warshall算法用于解决所有节点对之间的最短路径问题。
该算法通过动态规划的方式逐步更新节点对之间的最短路径。
Floyd-Warshall算法适用于带权有向图,它可以处理带有负权边但没有负权环的图,时间复杂度为O(V^3),其中V是图中节点的数量。
4.A*算法A*算法是一种启发式算法,常用于解决的问题是在有向加权图中找到两个节点之间的最短路径。
该算法利用启发式函数估计从当前节点到目标节点的最短距离,并以此为依据选择下一个节点进行展开。
A*算法通常比Dijkstra算法效率更高,但需要适当的启发式函数来保证结果的正确性。
以上是几种常用的最短路径算法,它们各自适用于不同的场景和问题。
选择合适的算法主要取决于图的类型、权重性质和问题要求等因素。
在实际应用中,根据具体情况进行算法选择非常重要,以获得更高效的求解结果。
算法论文:旅行商问题的求解方法(动态规划法和贪心法)讲解
旅行商问题的求解方法摘要旅行商问题(TSP问题)时是指旅行家要旅行n个城市然后回到出发城市,要求各个城市经历且仅经历一次,并要求所走的路程最短。
该问题又称为货郎担问题、邮递员问题、售货员问题,是图问题中最广为人知的问题。
本文主要介绍用蛮力法、动态规划法、贪心法和分支限界法求解TSP问题,其中重点讨论动态规划法和贪心法,并给出相应求解程序。
关键字:旅行商问题;动态规划法;贪心法;分支限界法1引言旅行商问题(TSP)是组合优化问题中典型的NP-完全问题,是许多领域内复杂工程优化问题的抽象形式。
研究TSP的求解方法对解决复杂工程优化问题具有重要的参考价值。
关于TSP的完全有效的算法目前尚未找到,这促使人们长期以来不断地探索并积累了大量的算法。
归纳起来,目前主要算法可分成传统优化算法和现代优化算法。
在传统优化算法中又可分为:最优解算法和近似方法。
最优解算法虽然可以得到精确解,但计算时间无法忍受,因此就产生了各种近似方法,这些近似算法虽然可以较快地求得接近最优解的可行解,但其接近最优解的程度不能令人满意。
但限于所学知识和时间限制,本文重点只讨论传统优化算法中的动态规划法、贪心法和分支限界法,并对蛮力法做简单介绍,用以比较。
2正文2.1蛮力法2.1.1蛮力法的设计思想蛮力法所依赖的基本技术是扫描技术,即采用一定的策略将待求解问题的所有元素一次处理一次,从而找出问题的解。
一次处理所有元素的是蛮力法的关键,为了避免陷入重复试探,应保证处理过的元素不再被处理。
在基本的数据结构中,一次处理每个元素的方法是遍历。
2.1.2算法讨论用蛮力法解决TSP问题,可以找出所有可能的旅行路线,从中选取路径长度最短的简单回路。
如对于图1,我们求解过程如下:(1)路径:1->2->3->4->1;路径长度:18;(2)路径:1->2->4->3->1;路径长度:11;(3)路径:1->3->2->4->1;路径长度:23;(4)路径:1->3->4->2->1;路径长度:11;(5) 路径:1->4->2->3->1;路径长度:18;(6) 路径:1->4->3->2->1;路径长度:18;从中,我们可以知道,路径(2)和(4)路径长度最短。
旅行者问题
3.推导动态规划方程
V_2_count++;
else
V_3_count++;
}
if((array_0_count == V_0_count) && (array_1_count == V_1_count)
&& (array_2_count == V_2_count) && (array_3_count == V_3_count))
现在对问题定义中的例子来说明TSP的求解过程。(假设出发城市是0城市)
①我们要求的最终结果是d(0,{1,2,3}),它表示,从城市0开始,经过{1,2,3}之中的城市并且只有一次,求出最短路径.
②d(0,{1,2,3})是不能一下子求出来的,那么他的值是怎么得出的呢?看上图的第二层,第二层表明了d(0,{1,2,3})所需依赖的值。那么得出:
5,0,2,3,
6,4,0,2,
3,7,5,0
};
int d[4][8]={0},i=0,j=0;
for(i=0; i<4; i++)
for(j=0; j<8; j++)
d[i][j]=1000; //假设1000为无穷大
TSP(d,c,V,4);
printf("The least road is:%d/n",d[0][7]);
图论中的最长路径问题与最短路径问题

图论中的最长路径问题与最短路径问题图论是数学中研究图的理论,其中最长路径问题和最短路径问题是图论中的经典问题。
本文将介绍这两个问题的定义、求解方法以及应用领域。
一、最长路径问题最长路径问题是指在给定的图中寻找一条路径,使得该路径的长度在所有路径中最长。
路径的长度可以根据边或顶点的数量来计算。
解决最长路径问题的方法有多种,其中最常用的是动态规划算法。
动态规划是一种将问题分解为子问题并逐步解决的算法。
在最长路径问题中,动态规划算法通常通过求解顶点的最长路径长度来得到整个图的最长路径。
在应用中,最长路径问题可以用来解决实际生活中的许多问题,例如交通规划、物流路径优化等。
通过找到最长路径,可以使得交通系统更加高效,减少行程时间和成本。
二、最短路径问题最短路径问题是指在给定的图中寻找一条路径,使得该路径的长度在所有路径中最短。
路径的长度可以根据边或顶点的权重来计算。
解决最短路径问题的方法同样有多种,其中最著名的是Dijkstra算法和Floyd-Warshall算法。
Dijkstra算法是一种贪婪算法,用于解决单源最短路径问题;Floyd-Warshall算法是一种动态规划算法,用于解决所有顶点对之间的最短路径问题。
最短路径问题在现实生活中有广泛应用,例如导航系统、网络路由等。
通过找到最短路径,可以计算出最佳的行进方向,使得路程更加迅捷和经济。
三、最长路径问题与最短路径问题的联系与区别最长路径问题和最短路径问题都是求解图中不同路径的问题,但两者在定义和目标上有所不同。
最长路径问题试图找到一条路径,使得其长度最大化,而最短路径问题试图找到一条路径,使得其长度最小化。
最长路径问题通常通过动态规划算法求解,而最短路径问题则可以通过Dijkstra算法和Floyd-Warshall算法等多种方法解决。
最长路径问题和最短路径问题在应用中也有差异。
最长路径问题主要应用于交通规划、物流路径优化等领域,而最短路径问题则广泛应用于导航系统、网络路由等领域。
tsp问题总结归纳

tsp问题总结归纳TSP(Traveling Salesman Problem,旅行商问题)是一类经典的组合优化问题,在数学和计算机科学领域具有重要的研究价值和实际应用。
本文将从定义、解决方法和应用三个方面,对TSP问题进行总结归纳。
一、定义TSP问题是指给定一系列城市和城市之间的距离,求解经过每个城市一次且路径最短的旅行路线。
该问题可以用图论中的欧拉图和哈密顿图来描述。
在欧拉图中,一笔画问题要求从图的一个顶点开始,经过每个边一次并回到起点;而哈密顿图中,要求从图的一个顶点开始,经过每个顶点一次而路径最短。
二、解决方法1. 穷举法:穷举法是最简单直接的解决TSP问题的方法,即尝试遍历所有可能的路径,并计算每条路径的总距离,从中选出最短的一条。
然而,由于TSP问题的复杂性,穷举法在实际应用中很少使用,因为其时间复杂度随着城市数量的增加而急剧增加。
2. 动态规划:通过将问题分解为子问题,并利用子问题的最优解构建整体最优解。
动态规划方法可以有效地解决TSP问题,但其时间复杂度仍然较高,在大规模问题中难以实施。
3. 遗传算法:遗传算法是一种基于生物进化原理的搜索算法,通过模拟遗传、突变和选择等操作,逐步优化解的质量。
遗传算法在解决TSP问题中具有良好的性能和适应性,能够处理较大规模的问题,但其结果并不一定是全局最优解。
三、应用TSP问题在实际生活和工程领域中有广泛的应用,如物流配送、路径规划、电路布线等。
通过求解TSP问题,可以帮助优化物流运输路线、节约时间和资源成本,提高效率。
结论TSP问题是一个具有理论研究价值和实际应用的经典问题,其求解方法多种多样。
穷举法虽然简单直接,但在实际问题中难以应用;动态规划方法虽然高效,但对于大规模问题仍有限制;遗传算法具有较好的适应性和性能,可以处理较大规模的问题。
TSP问题在实际应用中可以有效地优化物流和路径规划等方面,提高效率和节约成本。
通过对TSP问题的总结归纳,我们可以更好地理解和应用有关组合优化问题的解决方法,推动其在实践中的发展和应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
动态规划求最短旅行路线摘要:在我们日常生活和旅行中经常遇到求最短路径的问题,将动态规划思想运用到求解旅行问题最短路径中,将过程划分为几个阶段,在每阶段中选取最优策略,最后将找到整个过程的总体优化目标即最短路径。
给出了动态规划方法的基本原理,尽力了动态规划数学模型,通过一个实际应用例子具体说明动态规划求解旅行问题最短路径过程,并总结出动态规划在此类问题中的优越性。
关键词:动态规划,最短路径,多阶段决策,Matlab一、预备知识1.基本理论1.1动态规划基本思想动态规划]1[是一种强有力的算法设计技术,它被广泛用于求解组合最优化问题。
这种方法是采用自底向上的方式递推求值,将待求解的问题分解成若干个子问题,先求解子问题,并把子问题的解存储起来以便以后用来计算所需要求的解。
总言之,动态规划的基本思想就是把全局的问题化为局部的问题,为了全局最优必须局部最优。
动态规划基本步骤:(1)找出最优解的性质,并刻划其结构特征;(2)递归的定义最优值;(3)以自底向上的方式计算出最优值;(4)根据计算最优值时的信息,构造最优解。
1.2多阶段决策过程分析多阶段决策]3[问题是根据问题本身的特点,将其求解的过程划分为若干个相互独立又相互联系的阶段,在每一个阶段都需要做出决策,并且在一个阶段的决策确定以后再转移到下一个近阶段,在每一阶段选取其最优决策,从而实现整个过程总体决策最优的目的。
适合用动态规划方法求解的问题是一类特殊的多阶段决策问题,具有“无后效性”的多阶段决策问题,一般具有以下特点:(1)可以划分成若干个阶段,问题的求解过程是对若干个阶段的一系列决策过程。
(2)每个阶段有若干个可能状态。
(3)一个决策将你从一个阶段的一种状态带到下一阶段的某钟状态。
(4)在任一阶段,最佳的决策序列和该阶段以前的决策无关。
(5)各阶段状态之间的转换有明确定义的费用,而且在选择最佳决策时有递推关系(即状态转移方程)。
二、动态规划求最短旅行路线2.1问题重述设某旅行者要从A点出发到终点B,他事先得到一张路线图如图1所示,各阶段距离如图上所标数值,旅行者沿着箭头方向行走总能到达B点。
试求出A 到B点两点间的最短旅行路线及距离。
图1:旅游路线图2.2问题模型建立(两种方法)2.2.1逆序递推法模型首先根据网络图建立数学模型,我们可以将旅行过程划分成六个阶段。
阶段便两用k 表示;状态变量s 。
表示k 阶段初可能的位置;决策k X 表示k 阶段初可能选择的路线;状态转移方程k k k x s s -=+1; 阶段指标k v 表示k 阶段与所选择的路段相应的路长; k f 表示第k 阶段点k s 到终点层的旅行费用;递推公式}min{1++=k k k f v f ,k=6,5,4,3,2,1; *k x 表示最优决策;边界条件k=7时,07=f 。
2.2.2 Dijkstra 算法模型求A 到B 点最短路,对于每个顶点,定义两个标记))(),((v z v l ,其中: )(v l :表从起点A 到v 的一条路的权。
)(v z :v 的父亲点,用以确定最短路的路线算法的过程就是在每一步改进这两个标记,使最终)(v l 为从顶点A 到B 的最短的权。
S :具有永久标号的顶点集输入:带权邻接矩阵),(v u w 。
2.3模型求解(两种解法)2.3.1逆序递推法逆序递推方程为:)}(),({min )(11+++=k k k k u k k s f u s d s f k k=6,5,4,3,2,1;0)(77=s f .整个计算过程分六个阶段,从最后一个阶段开始直到第一阶段结束,利用Matlab ]4[最后求得最短路径]2[。
最后求得:{}16},16m in{)(),(),(),(m in )(221==++=D f D A d C f C A d A f 于是从A 到B 的最短路线为:A->C->F->J->M->O->B ,其长度为16。
matlab 代码如下:a=[0 4 3 inf inf inf inf inf inf inf inf inf inf inf inf inf;... Inf 0 inf 5 4 inf inf inf inf inf inf inf inf inf inf inf;... Inf inf 0 inf 7 3 inf inf inf inf inf inf inf inf inf inf;... Inf inf inf 0 inf inf 2 1 inf inf inf inf inf inf inf inf;... Inf inf inf inf 0 inf inf 1 2 inf inf inf inf inf inf inf;... Inf inf inf inf inf 0 inf inf 7 4 inf inf inf inf inf inf;... Inf inf inf inf inf inf 0 inf inf inf 3 inf inf inf inf inf;... Inf inf inf inf inf inf inf 0 inf inf 3 4 inf inf inf inf;... Inf inf inf inf inf inf inf inf 0 inf inf 2 5 inf inf inf;... Inf inf inf inf inf inf inf inf inf 0 inf inf 2 inf inf inf;... Inf inf inf inf inf inf inf inf inf inf 0 inf inf 5 inf inf;... Inf inf inf inf inf inf inf inf inf inf inf 0 inf 2 8 inf;... Inf inf inf inf inf inf inf inf inf inf inf inf 0 inf 4 inf;... Inf inf inf inf inf inf inf inf inf inf inf inf inf 0 inf 2;... Inf inf inf inf inf inf inf inf inf inf inf inf inf inf 0 1;... Inf inf inf inf inf inf inf inf inf inf inf inf inf inf inf 0]s11=a(11,14)+a(14,16);s12=min(a(12,14)+a(14,16),a(12,15)+a(15,16));s13=a(13,15)+a(15,16);s7=a(7,11)+s11;s8=min(a(8,11)+s11,a(8,12)+s12);s9=min(a(9,12)+s12,a(9,13)+s13);s10=a(10,13)+s13;s4=min(a(4,7)+s7,a(4,8)+s8);s5=min(a(5,8)+s8,a(5,9)+s9);s6=min(a(6,9)+s9,a(6,10)+s10);s2=min(a(2,4)+s4,a(2,5)+s5);s3=min(a(3,5)+s5,a(3,6)+s6);s1=min(a(1,2)+s2,a(1,3)+s3)程序运行结果:于是从A 到B 的最短路线为:A->C->F->J->M->O->B ,其长度为16。
2.3.2 Dijkstra 算法算法步骤:(1)赋初值:令 A 顶点为u 0,S ={u 0}, l u ()0=0,∀∈=v S VS \,令l v ()=Wu v (,)0,z v ()= u 0 u ←u 0(2)更新l v ()、z v (): ∀∈=v S VS \,若l v ()>lu W u v ()(,)+则令l v ()=lu W u v ()(,)+,z v ()= u(3)设v *是使l v ()取最小值的S 中的顶点,则令S=S ∪{v *},u ←v *(4)若S ≠φ,转2,否则,停止。
用上述算法求出的l v ()就是A 到其它顶点的最短路的权,从v 的父亲标记)(v z 追溯到A, 就得到A 到B 的最短路的路线。
Matlab代码如下:w=[0 4 3 inf inf inf inf inf inf inf inf inf inf inf inf inf;... Inf 0 inf 5 4 inf inf inf inf inf inf inf inf inf inf inf;...Inf inf 0 inf 7 3 inf inf inf inf inf inf inf inf inf inf;...Inf inf inf 0 inf inf 2 1 inf inf inf inf inf inf inf inf;...Inf inf inf inf 0 inf inf 1 2 inf inf inf inf inf inf inf;...Inf inf inf inf inf 0 inf inf 7 4 inf inf inf inf inf inf;...Inf inf inf inf inf inf 0 inf inf inf 3 inf inf inf inf inf;... Inf inf inf inf inf inf inf 0 inf inf 3 4 inf inf inf inf;...Inf inf inf inf inf inf inf inf 0 inf inf 2 5 inf inf inf;...Inf inf inf inf inf inf inf inf inf 0 inf inf 2 inf inf inf;... Inf inf inf inf inf inf inf inf inf inf 0 inf inf 5 inf inf;... Inf inf inf inf inf inf inf inf inf inf inf 0 inf 2 8 inf;...Inf inf inf inf inf inf inf inf inf inf inf inf 0 inf 4 inf;... Inf inf inf inf inf inf inf inf inf inf inf inf inf 0 inf 2;... Inf inf inf inf inf inf inf inf inf inf inf inf inf inf 0 1;... Inf inf inf inf inf inf inf inf inf inf inf inf inf inf inf 0] n=size(w,1);w1=w(1,:);%赋初值for i=1:nl(i)=w1(i);z(i)=1;ends=[];s(1)=1;u=s(1);k=1lzwhile k<n% 更新 l(v) 和 z(v)for i=1:nfor j=1:kif i~=s(j)if l(i)>l(u)+w(u,i)l(i)=l(u)+w(u,i);z(i)=u;endendendendlz%求v*ll=l;for i=1:nfor j=1:kif i~=s(j)ll(i)=ll(i); elsell(i)=inf; endendendlv=inf;for i=1:nif ll(i)<lvlv=ll(i);v=i;endendlvvs(k+1)=vk=k+1u=s(k)endlz程序运行结果为:于是从A到B的最短路线为:A->C->F->J->M->O->B,其长度为16。