曲线、轮廓加工刀具轨迹计算
数控铣编程中刀具半径补偿和长度补偿
数控铣编程中刀具半径补偿和长度补偿【摘要】刀具中心轨迹与工作轨迹常不重合。
通过刀具补偿功能指令,数控铣床系统可以根据输入补偿量或者实际的刀具尺寸,使数控铣床自动加工出符合程序要求的零件。
刀具半径补偿即根据按轮廓编制的程序和预先设定的偏置参数,实时自动生成刀具中心轨迹的功能成为刀具半径补偿功能。
【关键词】数控铣床;刀具;半径补偿;长度补偿1.刀具半径补偿由于数控加工的刀具总有一定的半径,刀具中心运动轨迹并不等于所需加工零件的实际轮廓,而是偏移轮廓一个刀具半径值。
在进行外轮廓加工时,使刀具中心偏移零件零件的外轮廓表面一个刀具半径值,加工内轮廓时,使刀具中心偏移零件内轮廓表面一个刀具半径值,这种偏移习惯上称为刀具半径补偿数控铣床刀具类型0-9种,这些内容应当事前输入刀具编制文件。
刀具半径补偿的轮廓切削。
刀具半径补偿的灵活应用,灵活应用的思路使用刀具半径补偿功能。
随着计算机技术和数控技术的发展都经历了B(Base)功能C极坐标法,法、矢量判断法。
刀具补偿技术和C功能刀具半径技术。
目前,数控系统中普遍采用的是C功能刀具半径补偿技术。
2.C功能刀具半径补偿的基本思想数控系统C功能刀具半径补偿的硬件结构由缓冲寄存器CS、工作寄存器AS和输出寄存器OS等部分组成。
在C功能刀补工作状态中,数控铣床装置内部总是同时存储着三个程序段的信息。
进行补偿时,第一段加工程序先被读入BS,在BS中算得的第一段编程轨迹被送到CS暂存后,又将第二段程序读入BS,算出第二段的编程轨迹。
接着对第一、第二两段编程轨迹的连接方式进行判别,根据判别结果,再对CS中的第一段编程轨迹进行相应的修正。
修正结束后,顺序地将修正后的第一段编程轨迹由CS送到AS,第二段编程轨迹由BS送入CS。
随后,由CPU将AS中的内容送到OS进行插补运算,运算结果送到伺服驱动装置予以执行。
当修正了第一段编程轨迹开始被执行后,利用插补间隙,CPU又命令第三段程序读入BS。
数控车削加工刀具轨迹自动生成的算法

数控车削加工刀具轨迹自动生成的算法本文针对数控车削加工的特点,结合被加工零件的特征,提出了数控车削加工刀具轨迹自动生成的算法。
该算法在实际应用中,取得了理想的效果。
1 零件图的预处理根据数控车削加工的特点,零件的加工工艺分为:孔加工(包括打中心孔),外(内)表面加工、退刀槽及螺纹加工,根据表面质量的要求,又分为粗加工、半精加工和精加工等工艺。
数控车削加工刀具轨迹的规划,重点外(内)表面粗加工时刀具轨迹的规划处理。
对退刀槽、螺纹样的零件特征在进行表面粗加工时将其用表面代替,如图1。
数控加工中为减少多次安装带来的安装误差,一般采用一次装夹,对那些需要调头加工的部位则采取右偏刀反向走刀切削。
此外,对端面的加工有时选取向下的切削方向。
因此加工时的切削方向分为向左、向右和向下的切削方向。
图1对于倒角和倒圆角等工艺的处理在算法上将其作为表面处理。
对反向走刀切削时的刀具轨迹规划的算法与正向切削时类似,对内表面加工时刀具轨迹规划的算法与外表面切削时也相类似。
另外对精加工时的刀具轨迹规划,以及退刀槽和螺纹加工的刀具轨迹规划处理也较为容易。
一般,为减少刀具轨迹生成算法的复杂性,在刀具轨迹生成前对零件进行刀具干涉处理(刀具干涉处理的算法另文讨论)。
本文仅讨论正向切削外表面时粗加工刀具轨迹生成的算法。
2 刀具轨迹生成的算法图2由于粗加工刀具轨迹规划是从毛坯开始的,因此生成刀具轨迹时必须考虑毛坯的形状,并且随着工步的不同,其毛坯的形状也是不同的,此即工艺毛坯。
由于在轨迹生成前已经进行过刀具干涉的处理,所在刀具轨迹生成时主要考虑的是零件图形的特征。
经过零件图的预处理后,零件图形是由直线和圆弧所构成的连续表面,其中的关键是对图形中凹槽的识别和处理。
如图2所示,零件图形经过处理后,其粗加工的外表面轮廓为ABCDEPFGHIQJKM,经刀具切削方向为左时干涉处理后,其轮廊为ABCDPEFGHQJKM,其阴影部分为欠切削部分,在下一工步加工时,反向走刀切削时的刀具的起点分别为P点和Q点,通过反向向右走切切除其残留部分,从而形成所要求的零件轮廓QIH和PED。
刀具半径补偿指令G40、G41、G42,
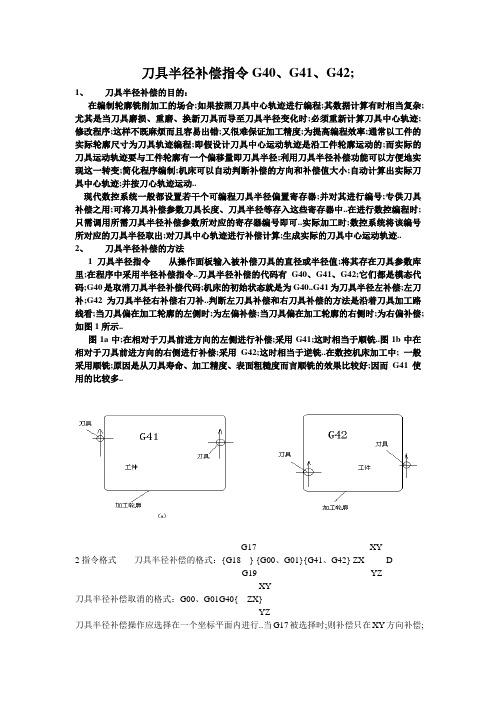
刀具半径补偿指令G40、G41、G42;1、刀具半径补偿的目的:在编制轮廓铣削加工的场合;如果按照刀具中心轨迹进行编程;其数据计算有时相当复杂;尤其是当刀具磨损、重磨、换新刀具而导至刀具半径变化时;必须重新计算刀具中心轨迹;修改程序;这样不既麻烦而且容易出错;又很难保证加工精度;为提高编程效率;通常以工件的实际轮廓尺寸为刀具轨迹编程;即假设计刀具中心运动轨迹是沿工件轮廓运动的;而实际的刀具运动轨迹要与工件轮廓有一个偏移量即刀具半径;利用刀具半径补偿功能可以方便地实现这一转变;简化程序编制;机床可以自动判断补偿的方向和补偿值大小;自动计算出实际刀具中心轨迹;并按刀心轨迹运动..现代数控系统一般都设置若干个可编程刀具半径偏置寄存器;并对其进行编号;专供刀具补偿之用;可将刀具补偿参数刀具长度、刀具半径等存入这些寄存器中..在进行数控编程时;只需调用所需刀具半径补偿参数所对应的寄存器编号即可..实际加工时;数控系统将该编号所对应的刀具半径取出;对刀具中心轨迹进行补偿计算;生成实际的刀具中心运动轨迹..2、刀具半径补偿的方法1刀具半径指令从操作面板输入被补偿刀具的直径或半径值;将其存在刀具参数库里;在程序中采用半径补偿指令..刀具半径补偿的代码有G40、G41、G42;它们都是模态代码;G40是取消刀具半径补偿代码;机床的初始状态就是为G40..G41为刀具半径左补偿;左刀补;G42为刀具半径右补偿右刀补..判断左刀具补偿和右刀具补偿的方法是沿着刀具加工路线看;当刀具偏在加工轮廓的左侧时;为左偏补偿;当刀具偏在加工轮廓的右侧时;为右偏补偿;如图1所示..图1a中;在相对于刀具前进方向的左侧进行补偿;采用G41;这时相当于顺铣..图1b中在相对于刀具前进方向的右侧进行补偿;采用G42;这时相当于逆铣..在数控机床加工中; 一般采用顺铣;原因是从刀具寿命、加工精度、表面粗糙度而言顺铣的效果比较好;因而G41使用的比较多..G17 XY2指令格式刀具半径补偿的格式:{G18 } {G00、G01}{G41、G42} ZX DG19 YZXY刀具半径补偿取消的格式:G00、G01G40{ ZX}YZ刀具半径补偿操作应选择在一个坐标平面内进行..当G17被选择时;则补偿只在XY方向补偿;而Z方向不进行补偿;当G18被选择时;则补偿只在ZX方向补偿;而Y方向不进行补偿;当G19被选择时;则补偿只在YZ方向补偿..而X方向不进行补偿..G00和G01为刀具运动指令;刀具补偿的建立和取消必须在G00或G01状态下完成;XYZ 后所跟的值为运动的目标点坐标;与指定平面中的轴相对应..D与后面的数值是刀补号码;它代表刀具参数库中刀补的数值..如D01表示刀参数库中第一号刀具的半径值..这一数值预先输入在刀具参数库刀补表中的01号位置上..在一般情况下;我们把刀具的半径补偿量在补偿代码中输入为正值+;如果把刀具半径补偿量设为负值—时;在走刀轨迹方向不变的情况下;则相当于把补偿指令G41、G42互换了..加工工件内侧的刀具会变为外侧;加工工件外侧的刀具会变为内侧..3.刀具半径的补偿动作以加工图2所示工件为例子;根据加工程序分析刀具半径的补偿动作..加工程序如下:O0001;N10 G54 G90 G17 G00 X0 Y0 S1000 M03;N20 G41 X20 Y10 D01;N30 G01 Y50 F100 ;N40 X50 ;N50 Y20;N60 X10 ;N70 G00 G40 X0 Y0 M05;N80 M30;上述程序中的刀补动作为;1启动并建立刀具半径补偿阶段当N20程序中编入G41和D01指令后运算装置同时先读入N30、N40两段;在N20段的终点N30段的始点作出一个矢量;该矢量的方向与下一段的前进方向垂直且向左;大小等于刀补值..刀具中心在执行这一段N20时移向该矢量终点..在该阶段中动作指令只有用G00或G01不能用G02或G03..2刀补状态从N30段开始进入刀补状态;在这个阶段下G01、G02、G03、G00都可以使用..这一阶段也是第段都先行读入两段;自动按照启动阶段的矢量法作出第个沿前进方向侧且加上刀补的矢量路径..3取消刀补当N70程序段中用到G40指令时;则在N60段的终点N70段的始点作出一个矢量;它的方向与N60段前进方向垂直且朝左;大小为刀补值..刀具中心就停止在这个矢量的终点;从这一位置开始刀具中心移向N70段的终点..此时也只能用G01或G00;面、而不能用G02或G03..。
CAXA制造工程师平面轮廓加工中刀具半径补偿的应用
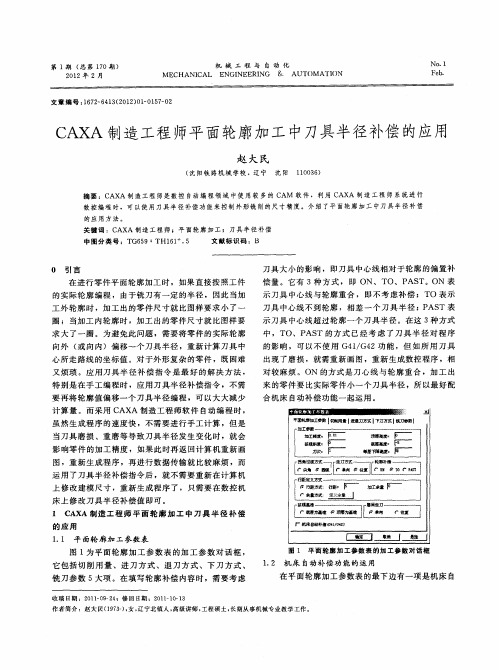
1 3 机 床 自动补 偿应 具备 的条 件 . ( )轮廓 补偿 项必 须选 择 “O ” 的方式 。 1 N
( ) 刀具半 径 大 于 零件 轮 廓 的 内 凹圆 角半 径 时 , 2 不 能 直接 使用 自动 补偿 ,否 则将 导致 进刀 超差 而发 生
的应 用 : 。 疗法
关键词 : A :C XA 制 造 工 程 师 ;平 面 轮 廓 加 工 ; 刀 具 半 径 补 偿 中 图 分 类 号 :T 5 TH1 1 5 G6 9: 6 . 文献 标 识 码 ;B
0 引 言
刀具 大小 的影 响 ,即刀具 中心线 相对 于轮廓 的偏 置补 偿 量 。它有 3种 方 式 , 即 0N、T O、P T。ON 表 AS
刀段直线长度 与进刀 角度正 弦值 的乘积 大于刀 具半 径 。 同时满足以上两 个条 件 ,就能 防止 由于半 径补 偿滞 后 、 取消补偿提前或偏置距离不足而造成 的过切现象 。
( )采 用圆弧 进 刀 ,也 要 同时满 足 :①单 独指 定 3 进 、退 刀点 ;②进 刀 圆弧半 径大 于刀 具半 径 。 以免 因 进刀 超 差而导 致 过切 现象 的发生 。
ZH Ao - i Da r n a
( e y n i y M e h n c Co l g ,S n y n 1 0 ,Ch n ) Sh n a g Ra l wa e a i l e he g a g 1 0 36 e ia
Ab ta t s r c :CAXA a u a t r g En i e r i i d o M n f c u i gn e s a k n f CAM o t r h t h s b e d l u e n t e f l f NC a t ma i n s fwa e t a a e n wi e y s d i h i d o e uo t c
刀尖半径补偿计算公式
刀尖半径补偿计算公式
刀尖半径补偿是数控加工中的一项重要技术,用于保证加工轮廓的尺寸精度。
刀具的尺寸并不是完全准确的,因此在加工过程中会出现误差,特别是在弯曲或曲线轮廓的加工中,误差会更加明显。
为了解决这个问题,引入了刀尖半径补偿技术。
刀尖半径补偿的基本原理是将刀具轨迹进行补偿,以抵消刀具的尺寸误差。
在进行刀尖半径补偿时,需要计算出刀尖半径补偿量,以便于校正刀具的轨迹。
刀尖半径补偿的计算公式可以根据不同的数控系统和加工方式有所不同,下面是一种常见的计算公式作为参考:
补偿值 = 理论值 - 实际值
其中,理论值是在进行数控编程时设定的轮廓大小,实际值是实际加工得到的轮廓大小。
通过计算补偿值,可以得到刀尖半径补偿量,从而进行刀具轨迹的补偿。
此外,刀尖半径补偿还涉及到切入角度和切入刀宽等参数的计算。
在进行刀尖半径补偿时,需要根据刀具的特性和加工要求,综合考虑切入角度和切入刀宽等因素,确定合适的补偿值。
刀尖半径补偿的计算公式不仅仅是一个简单的公式,还涉及到数学模型、机床的调整参数等一系列的考虑因素。
在实际应用中,还需要结合具体的加工情况和数控系统的要求,选择合适的计算公式和计算方法。
总之,刀尖半径补偿是数控加工中的一项重要技术,可以有效提高加工精度。
在实际应用中,需要根据具体情况选择合适的计算公式和方法,以实现刀具轨迹的精确控制。
五轴联动数控加工中的刀具轨迹控制算法

五轴联动数控加工中的刀具轨迹控制算法五轴联动数控加工是一种高精度、高效率的加工方式,可以实现对复杂曲面的加工。
在五轴联动数控加工中,刀具轨迹控制算法起着至关重要的作用,决定了加工精度和效率。
本文将介绍几种常见的刀具轨迹控制算法,并对其原理和应用进行详细阐述。
1. 五轴联动数控加工概述五轴联动数控加工是指在数控加工机床上,通过同时控制五个坐标轴的运动,实现对工件的加工。
相比于传统的三轴加工,五轴联动可以更加灵活地加工复杂曲面,提高加工质量和效率。
2. 刀具轨迹控制算法的作用刀具轨迹控制算法是五轴联动数控加工中的关键技术之一。
它可以根据工件的三维模型和加工要求,计算出刀具在加工过程中的运动轨迹,从而实现精确的加工。
刀具轨迹控制算法的好坏直接影响加工精度和效率。
3. 刀具轨迹控制算法的分类刀具轨迹控制算法可以分为两类:离散点算法和曲线插补算法。
离散点算法是指将工件曲面离散化为一系列离散点,然后通过逐点加工来实现曲面加工。
常见的离散点算法有直线连接法、圆心法和切点法等。
这些算法简单直观,适用于加工简单曲面。
曲线插补算法是指根据工件的曲线方程和刀具半径,通过插补计算出刀具的运动轨迹。
常见的曲线插补算法有圆弧插补法、曲线插补法和样条插补法等。
这些算法可以实现对复杂曲面的高精度加工。
4. 圆弧插补算法圆弧插补算法是五轴联动数控加工中最常用的一种刀具轨迹控制算法。
它通过计算刀具半径和工件曲线的切向方向,确定刀具的圆弧插补路径。
圆弧插补算法具有计算简单、加工效率高的优点,适用于多数加工场景。
5. 曲线插补算法曲线插补算法是一种更加精细的刀具轨迹控制算法,可以实现对复杂曲面的高精度加工。
曲线插补算法通过计算刀具在曲线上的切向方向和曲率,确定刀具的插补路径。
与圆弧插补算法相比,曲线插补算法需要更复杂的计算和控制,但可以实现更高的加工精度。
6. 样条插补算法样条插补算法是一种基于数学样条曲线的刀具轨迹控制算法。
它通过计算曲面上的样条曲线,将刀具的运动路径进行插补。
机械加工中心刀具路径规划与优化
机械加工中心刀具路径规划与优化一、引言随着机械加工中心技术的发展,刀具路径规划与优化在数控加工领域变得越来越重要。
合理的刀具路径规划不仅可以提高加工效率,还能减少刀具磨损,延长刀具使用寿命,并且降低了由于刀具插入造成的机械振动和噪音。
本文将探讨机械加工中心刀具路径规划与优化的方法和技术。
二、机械加工中心刀具路径规划1. 刀具路径规划的基本原则在机械加工中心中,刀具路径规划的基本原则主要包括以下几点:(1)保证刀具的安全性:刀具路径应尽可能避免刀具与加工区域以外的零件接触,以防止碰撞和损坏。
(2)保证加工效率:刀具路径应优化选取,使得刀具能够在最短的时间内完成加工任务。
(3)减少刀具的摆动和振动:刀具路径应尽可能降低刀具在加工过程中的摆动和振动,以避免对机床和刀具的损坏。
2. 刀具路径规划的方法(1)直线插补方法:根据零件的几何形状和加工要求,采用直线插补的方式确定刀具路径。
这种方法简单直观,但对于复杂形状的零件,刀具路径可能不够优化。
(2)圆弧插补方法:根据零件的曲线轮廓,采用圆弧插补的方式确定刀具路径。
圆弧插补方法能够更好地适应零件的曲线形状,提高加工效率和精度。
(3)曲面插补方法:对于复杂曲面零件的加工,采用曲面插补的方式确定刀具路径。
曲面插补方法可以根据曲面的特性,确定最优的刀具路径,提高加工效率和表面质量。
三、机械加工中心刀具路径优化1. 刀具路径长度优化刀具路径长度是影响加工效率的一个重要指标,路径长度越短,加工时间也就越短。
因此,如何优化刀具路径长度成为了一个研究的重点。
常用的优化方法包括遗传算法、模拟退火算法等。
这些算法可以通过优化选择最优的刀具路径,以达到最短的路径长度。
2. 刀具路径平滑优化在刀具路径规划过程中,刀具的运动轨迹应尽量平滑,以减少机床振动和噪音的产生。
这可以通过数学优化方法来实现,如贝塞尔曲线、样条曲线等。
这些曲线可以更好地拟合零件的形状,使刀具路径更加平滑。
3. 刀具路径避免重复工作优化在刀具路径规划过程中,避免刀具重复工作也是一项重要的优化内容。
数控加工中定曲线方程轮廓的等弦高误差拟合算法研究

本文针对指定方程轮廓采用等弦高误差拟合算法的控制策略通过指定加工弦高误差应用非均匀递归插值方法计算刀触点并通过对拟合轮廓等距偏置获得刀位点算法简单可靠且效率相对较高避免了均匀插值所造成的加工表面粗糙度不均匀和加工效率低的缺陷具有较高的通用性可应用于轴和轴数控加工以及线切割加工
制造业自动化
数控技术专栏
数控加工中定曲线方程轮廓的 等弦高误差拟合算法研究
牛文铁,胡德计,徐燕申,林 彬
(天津大学 机械工程学院,天津 !"""#$)
摘要:针对指定曲线方程轮廓,提出了等弦高误匀递归插值方法获得刀触点,通过拟合轮廓等距偏置获得刀位点。算法简单
可靠且效率相对较高,切削步长具有沿加工方向的曲率适应性,加工效率高。可应用
# 加工分段及数控代码自动生成
对于航空航天以及船舶领域内的应用,由于零
图 $ 绝对坐标系与局部加工坐标系
第 !" 卷第 # 期 !$$% 年 # 月 ·!·
制造业自动化
图 " 靠模板零件图 图 ! 加工实例
加工中,插值子区段按零件检查点区间 进行划分,共划分了 !3 个区段。图 4 为 经过插值拟合、等距偏置以及加工区段 划分计算后获得的刀位轨迹,其中实线 为 !!"55 铣刀二维铣削加工轨迹,虚 线为线切割加工轨迹,箭头指示了走 刀方向。实际加工用线切割机床最大 加工范围为 67" 8 67"55,因此根据零 件尺寸划分 9 个加工区段,为优先保证 曲线轮廓的加工精度,在加工区段划 分时应尽可能将曲线轮廓安排在机床 加工范围之内,如图所示的加工区域 **。同均匀插值拟合相比,输出的 %: 文 件 大 小 为 !;<=, 而 均 匀 插 值 时 为 64<=,数据量是其 ! > 6,实际加工时间 约为均匀插值时的 ! > #。
雕刻机刀具路径轨迹算法
雕刻机刀具路径轨迹算法雕刻机刀具路径轨迹算法是指在雕刻机进行雕刻操作时,通过计算和规划刀具的运动路径,使刀具能够按照预定的轨迹进行移动,从而实现所需的雕刻效果。
本文将介绍雕刻机刀具路径轨迹算法的原理和常用的实现方法。
一、雕刻机刀具路径轨迹算法的原理在雕刻机的刀具路径轨迹算法中,主要涉及到以下几个关键点:刀具移动的速度、刀具的运动方式、刀具的切削方向和刀具的切削深度。
1. 刀具移动的速度刀具移动的速度对于雕刻机的切削效果和雕刻速度有着重要的影响。
一般来说,刀具移动速度越快,雕刻速度越快,但同时也会影响雕刻的精度。
因此,在刀具路径轨迹算法中需要根据雕刻要求和设备性能来确定刀具的移动速度。
2. 刀具的运动方式刀具的运动方式通常有两种:直线运动和曲线运动。
在刀具路径轨迹算法中,需要根据雕刻的要求和设计来确定刀具的运动方式。
对于直线雕刻,可以采用直线插补算法来计算刀具的移动轨迹;对于曲线雕刻,可以采用圆弧插补算法来计算刀具的移动轨迹。
3. 刀具的切削方向刀具的切削方向决定了雕刻的效果和切削力的大小。
在刀具路径轨迹算法中,需要根据雕刻要求和材料特性来确定刀具的切削方向。
常见的切削方向有:顺时针切削、逆时针切削和双向切削。
根据切削方向的不同,刀具的路径轨迹也会有所差异。
4. 刀具的切削深度刀具的切削深度决定了雕刻的深度和切削力的大小。
在刀具路径轨迹算法中,需要根据雕刻要求和材料特性来确定刀具的切削深度。
切削深度可以通过控制刀具的下降速度和切削轨迹的设计来实现。
在实际应用中,有多种算法可以用来计算和规划雕刻机刀具的路径轨迹。
下面介绍几种常用的算法:1. 直线插补算法直线插补算法是一种简单而常用的刀具路径规划算法。
该算法通过计算直线的起点和终点坐标,并结合刀具的移动速度和切削深度,确定刀具的移动轨迹和切削速度。
2. 圆弧插补算法圆弧插补算法是一种用于计算和规划刀具路径的常用算法。
该算法通过计算圆弧的起点、终点和半径,并结合刀具的移动速度和切削深度,确定刀具的移动轨迹和切削速度。
第五讲 数控加工轨迹生成

,而环形走刀法则是以型腔轮廓的一组偏置轮廓构成刀 具运动轨迹。
1.环形走刀刀具轨迹生成方法
• 环形走刀的刀具轨迹在实质上都是由型腔轮廓的不断偏 置产生的,因此在原理上它可由轮廓加上刀具轨迹生成 算法的不断重复调用来完成。
(3)区域加工约束边界的处理 构成区域加工约束边界的各环(包括边界偏置环与岛屿 偏置环)均是由直线、圆弧段组成。
(4)约束边界的融合 当约束边界中包含岛屿偏置环时,实际走刀区域为边界 轮廓偏置环与各岛屿轮廓偏置环所围成区域的布尔差。 在此通过引入虚约束边界段将边界轮廓犏置环与各岛屿 轮廓偏置环融为一体,使任意多岛屿的复杂区域均变为 无岛屿的简单区域,从而使后续处理简单归一。
• 平行走刀是指用一组平行于某个方向的直线段作为加工 型腔区域的刀具轨迹,但型腔轮廓的精加工仍按环形走 刀方式进行。 (1)轮廓预处理与轮廓精加工刀具轨迹生成 顾名思义,该步骤的目的是生成用于最后对型腔边界 与各岛屿轮廓进行精加工的刀具轨迹。
(2)轮廓粗加工刀具轨迹的生成 该步骤的目的是生成作为后续内腔区域加工轨迹边界 约束的型腔边界轮廓偏置环与各岛屿轮廓偏置环,其 具体算法也已在上面给出,
(5)走刀区域的分解 融合处理后的约束边界围成的走刀区域可能具有很复杂 的形状,故在此将其进一步分解为一系列沿走刀方向单 凋的凸子区域.走刀过程再按各子区域分别进行,并通 过优化各子区域的先后走刀顺序而得到较合理的走刀路 线。
(6)型腔区域加工刀具轨迹的生成 型腔区域加工刀具轨迹的生成按各凸子区域分别进行, 其内容包括各平行切削行的起终点刀位和切削行间过渡 的刀位序列。 各子区域加工顺序的确定以获得最小空行程为原则,当 一子区域刀具轨迹生成完后,在剩余于区域中寻找与当 前刀位有最小距离的子区域,并过渡至该子区域继续进 行。
五轴计算方法
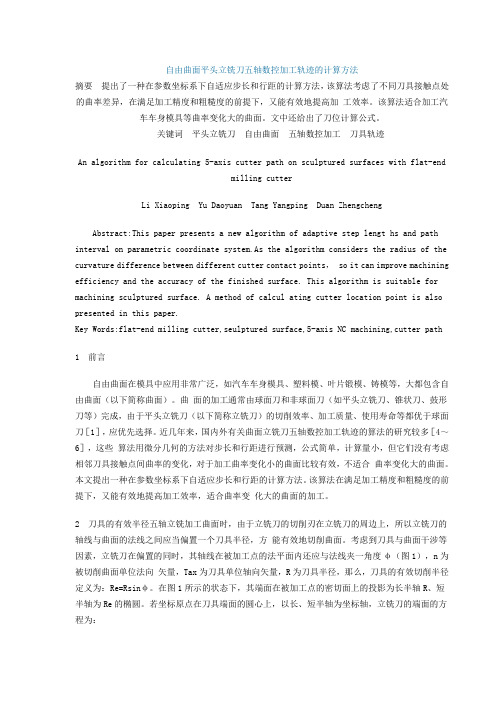
自由曲面平头立铣刀五轴数控加工轨迹的计算方法摘要提出了一种在参数坐标系下自适应步长和行距的计算方法,该算法考虑了不同刀具接触点处的曲率差异,在满足加工精度和粗糙度的前提下,又能有效地提高加工效率。
该算法适合加工汽车车身模具等曲率变化大的曲面。
文中还给出了刀位计算公式。
关键词平头立铣刀自由曲面五轴数控加工刀具轨迹An algorithm for calculating 5-axis cutter path on sculptured surfaces with flat-endmilling cutterLi Xiaoping Yu Daoyuan Tang Yangping Duan ZhengchengAbstract:This paper presents a new algorithm of adaptive step lengt hs and path interval on parametric coordinate system.As the algorithm considers the radius of the curvature difference between different cutter contact points, so it can improve machining efficiency and the accuracy of the finished surface. This algorithm is suitable for machining sculptured surface. A method of calcul ating cutter location point is also presented in this paper.Key Words:flat-end milling cutter,seulptured surface,5-axis NC machining,cutter path 1 前言自由曲面在模具中应用非常广泛,如汽车车身模具、塑料模、叶片锻模、铸模等,大都包含自由曲面(以下简称曲面)。
刀位点轨迹坐标的计算

图13(b)是车削锥体表面时由刀尖圆弧半径r刀 引起的刀 位补偿计算简图。当采用在Z向与X向同时进行刀具位置补偿 时,实际刀刃与工件接触点A移到编程时刀尖的设定点M上,r 刀的补偿量计算为:
数控机床编程中的图形数学处理
δZ = r刀– r刀 sinθ= r刀(1 – sinθ) r δX = 刀– r刀 cosθ= r刀(1 – cosθ)
若不用Z向和X向同时补偿的方法,而只在Z向或X向进行 补偿,由图13(b)可知:
h = r刀 cos(45° – θ) – r刀 = r刀(sinθ+cosθ – 1)
所以Z向或X向的补偿量可分别按下面公式计算:
r △Z= h = 刀(1-tan )
sin
2
r △X=
h
c os
=
2
刀(
Байду номын сангаас
1 cot
X 352 Y 152 (10 5)2
解出: X=20.606, Y=19.22
数控机床编程中的图形数学处理
求解直线的等距线方程,当所求等距线在原直线上边时,应 取“+”号,反之取“–”号;求解圆的等距线方程,当所求等距线 为外等距线时,取“+”号,求内等距线时取“–”号。
当零件的轮廓中包含非圆曲线时,应先按零件轮廓进行节点 计算,然后再求相应等距线之间的节点坐标。直线段逼近时,用 两相邻直线的等距线方程求解;圆弧段逼近时,用两圆弧段的等 距线方程联立求解;采用相切的圆弧逼近时,不解方程组,就可 求出等距线的节点坐标数据。
第二章(2) 刀具补偿计算

S1 S2
P1(X1,Y1)
P
③ 插入型 此时有三个转接点。 转接点S1(Xs1,Ys1)相对于轮廓拐点P1 仅相差第一条编程轨迹在P1点的刀具半径矢量 ,故有:
Y
P0(X0,Y0)
P2(X2,Y2)
S3
X
⎧ X S 2 = X 1 − r Yl1 + r X l1 ⎨ ⎩ YS 2 = Y1 + r X l1 + r Yl1
转接点S3(Xs3,Ys3)相对于点P沿第二 条编程轮廓在P1点处的方向矢量的反方向偏移 了一个刀具半径,故有:
⎧ X S 3 = X 1 − r Yl 2 − r X l 2 ⎨ ⎩ YS 3 = Y1 + r X l 2 − r Yl 2
注意: 按照这里介绍的算法确定进刀编程 轨迹(包含G41/G42的程序段)的刀具 中心轨迹时,仍然有可能发生刀具干涉 现象,因此在编制数控加工程序时,一 定要合理选择进刀编程轨迹。
⎧Xl2 = J R ⎨ ⎩ Yl2 = − I R
⎧ R = I2 + J2 ⎪ R=⎨ ⎪− R = − I 2 + J 2 ⎩ (顺圆弧) (逆圆弧)
② 在一般情况下,我们不选用圆弧来作为退刀编程轨迹,因此在直线接 圆弧的转接方式中,只需考虑刀具半径补偿建立阶段与进行阶段的转接点坐标 计算问题。 ③ 直线接圆弧刀具半径补偿的转接点计算方法与直线接直线的情况完全 类似。
消去参量k,可得等距线方程为
r r
r rd
P1
r l
X
x YL − y X L = −r
(2-1)
② 等距线交点 根据(2-1)式,相邻直线轮廓等距线的联立方程如下。
⎧ x YL1 − y X L1 = −r ⎨ ⎩ x YL 2 − y X L 2 = −r
Cimatron E轮廓类零件的加工
保存程序。分为保存并关闭和保存并计算两种
(1)零件顶面的加工
图7-2-4
图7-2-5
平行切削:设定角度以平行方式进行铣削。
(2)零件凸台的粗加工
图7-2-6
环切:在2D加工范围内以环绕方式进行铣削。
(3)零件凸台的精加工
图7-2-7
封闭轮廓--封闭边界起始轮廓与终止轮廓相连在一起。
(4)创建零件凹台的加工程序
刀具轨迹:
图7-2-8
零件轮廓:
图7-2-9
保存计算:
图7-2-10
(5)创建零件两个凹槽的加工程序
零件轮廓:
图7-2-11
保存计算:
图7-2-12
STEP8进行高级仿真
图7-2-13
STEP9保存
单击工具条上的【保存】按钮,在弹出的“Cimatron E浏览器”窗口中输入文件名为“编程1”,保存文件。
轮廓类件的加工
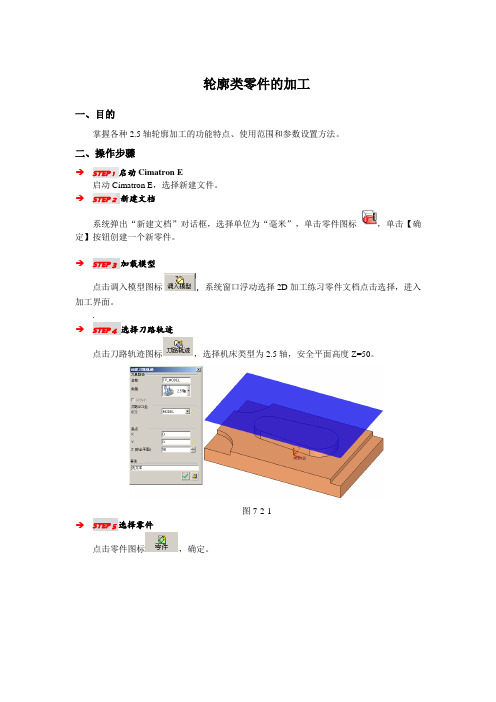
一、目的
掌握各种2.5轴轮廓加工的功能特点、使用范围和参数设置方法。
二、操作步骤
STEP 1启动Cimatron E
启动Cimatron E,选择新建文件。
STEP 2新建文档
系统弹出“新建文档”对话框,选择单位为“毫米”,单击零件图标 ,单击【确定】按钮创建一个新零件。
STEP 3加载模型
创建加工程序是CAM的核心操作内容,生成加工程序以及对加工程序各种参数的设置都在这一步骤内完成。创建加工程序里又分为:
选择加工工艺。选择加工的刀轨形式,它包括主选项和子选择。
选择刀具。选取或新建适合本程序加工的刀具。
选择加工对象。选取本程序要加工的零件:边界、零件轮廓、毛坯轮廓等。
车床r角编程刀尖的算法

车床r角编程刀尖的算法车床是一种用于加工金属材料的机床,广泛应用于工业生产中。
在车床加工过程中,刀尖的位置和角度对于加工质量和效率至关重要。
本文将介绍车床r角编程刀尖的算法,以帮助读者更好地理解和应用这一技术。
一、什么是r角编程刀尖算法r角编程刀尖算法是一种用于车床加工的刀具路径规划算法。
r角即为刀尖半径,是刀具在加工过程中与工件表面的最小距离。
r角编程刀尖算法通过计算刀尖在加工过程中的位置和角度,使得刀具在接触工件时不会与其发生碰撞,从而确保加工过程的安全和质量。
二、r角编程刀尖算法的原理r角编程刀尖算法的核心原理是根据工件的轮廓和加工要求,计算出刀具在不同位置和角度下的刀尖半径,并结合车床的运动轨迹,确定刀具的路径。
具体而言,r角编程刀尖算法首先需要获取工件的CAD模型或轮廓数据,然后根据加工要求和刀具参数,确定刀尖半径。
接下来,根据车床的运动轨迹,计算出刀具在不同位置和角度下的刀尖半径。
最后,通过比较刀尖半径和r角,确定刀具的路径,以实现安全和高效的加工。
三、r角编程刀尖算法的应用r角编程刀尖算法在车床加工中具有广泛的应用价值。
它可以用于各种金属材料的加工,例如钢、铝、铜等。
同时,它还可以适用于不同形状和尺寸的工件,包括圆柱体、圆锥体、球体等。
通过使用r角编程刀尖算法,可以实现以下几个方面的优化:1. 刀具路径的优化:r角编程刀尖算法可以根据刀具和工件的几何形状,确定最优的刀具路径,以减少加工时间和刀具磨损。
2. 加工质量的提高:r角编程刀尖算法可以确保刀具在加工过程中与工件的接触安全,避免刀具与工件发生碰撞,从而提高加工质量。
3. 加工效率的提升:r角编程刀尖算法可以根据工件的几何形状和加工要求,确定最优的刀具路径和加工参数,以提高加工效率。
四、r角编程刀尖算法的挑战和发展方向尽管r角编程刀尖算法在车床加工中具有重要的应用价值,但仍面临一些挑战。
r角编程刀尖算法需要准确获取工件的CAD模型或轮廓数据,然而现实中往往存在数据获取不准确或不完整的情况,这给算法的应用带来了困难。
走刀路线与加工参数

1.1 走刀路线
▪ 在确定走刀路线时,主要应考虑 1 保证加工零件的精度与表面粗糙度
由于该零件的余量不均匀,其粗 加工的合理走刀路线如图中双点 划线所示分为4段,在依次加工 完成后,换精车刀一次精车全部 外表面,这样的走刀路线即保证 了零件的加工精度,又避免了分 段精加工时的接刀痕,保证了零 件的表面粗糙度。
1.1 走刀路线
▪ 在确定走刀路线时,主要应考虑 ▪ 3 合理选择铣削内轮廓的走刀路线
行切法,路线虽 短,但工件轮廓 周边有较大的残
留余量
环切法,路 线较长且计 算较复杂
先用行切法粗铣,最后 用环切法精铣内轮廓一 周,既保证了加工质量, 路线也较短,计算又简
单,是最佳方案。
1.1 走刀路线
▪ 在确定走刀路线时,主要应考虑
▪ 4 注意刀具切入,切出点的距离
在进行钻孔、扩孔、饺孔、锉孔和攻螺纹等孔 的加工时,为了缩短加工时间,通常将刀具沿 Z 轴方向快速移到离加工表面某一距离处,然后以 工进速度开始加工,此安全距离即为刀具切入点 距离;加工通孔时,为保证孔底部的精度,防止 欠切削现象发生,刀尖应超越工件表面一段距离, 称为刀具切出点的距离。刀具切入、切出点距离 应按有关标准或推荐值采用,不应过长。
轮廓
1.2 切入点和切出点
用圆弧插补方式铣削 外整圆时,在整圆加 工完毕后不得在切点 处而应沿切线方向让 刀具多行一段距离, 以免取消刀具补偿时, 刀具与工件表面发生 碰撞,造成工件报废
1.3 切削用量的选择
▪ 切削用量包括主轴转速(切削速度)、进给量以及背吃刀量 (切削深度)。编程人员几乎在编制每一道零件加工工序的数控程 序时,都会遇到切削用量的选择问题。切削用量的正确选择,将有 利于发挥数控机床的特点,提高切削效率,保证刀具的寿命和加工 质量,降低加工成本。
三轴数控车等截面零件加工技术

三轴数控车等截面零件加工技术摘要:本文研究了三轴数控车等截面零件加工技术,分析了数控切削中的刀具补偿问题,针对等截面轮廓零件加工方式,设计了平切和环切两种加工方式,对算法理论进行初步介绍。
建立加工所用刀具的刀具模型,介绍了等截面粗加工和精加工方法,进一步理解三轴数控车等截面零件加工技术。
关键字:三维数控车,等截面零件,加工1.引言数控车床可以加工各种回转表面,当加工圆周表面或端面上的加工键槽或端面孔时,就要移动到其他机床上进行加工,实际中由于零件加工精度要求,需要零件在一次装夹中完成所有工序,因此普通车床显然不能满足这种以回转面为主要加工任务,兼有圆周表面或端面上加工的零件。
三轴数控车床在传统车床基础上增加了动力铣、钻、镗和辅主轴的功能,除了具有普通车床常规的X轴、Z轴控制,还有C轴功能,使工序在车床上一次完成,与铣削动力头的配合可以在工件上完成特殊型面的加工,,增加了机床的工艺加工范围。
1.数控车削中心发展现状三轴数控车床实现了多功能、复合化加工,在回转体类零件中有75%以上的零件在车削后要进行铣削、钻削或攻丝等工序,而且很多都存在背面二次加工问题。
这些加工工序在一台三轴数控车床上就可以实现,减少了工件多次周转和装夹,提高了零件加工精度。
三轴数控车床的发展经历了三个阶段,初始阶段,是高速度加工阶段,高速主轴将主轴和电机集成为一体,采用带装入式主轴电机的主轴套筒部件化结构等新技术,使主轴转速达到10*104-20*104r.min的水平。
多功能及复合化阶段,三轴数控车床将多种工艺集成到一台机床上,实现装夹工程的一次完全加工,使机床表现出多功能复合化趋势。
随着技术发展,抛光、磨削等高级工艺不断加入机床。
高功能与低价格结合的阶段,这一阶段带来机床的很多技术创新,如零部件模块化、通用化设计;出现数控和手动兼用的机床;经济型数控机床等。
1.三轴数控车等截面零件加工技术3.1零件轮廓的处理零件轮廓处理主要有样条轮廓的离散化处理和轮廓拐角的过渡处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1)近似的估计从ri到ri+1的参数增量△ti:
2)计算对应于参数ti+ △ti的曲线 上的点:
3)校核是否ri到ri+1的距离与希望的步长△Li之间的 误差是否满足要求。
4.1.2二维轮廓加工
与曲线加工轨迹计算不同:二维轮廓加工,其刀具轨迹是
在轮廓曲线上偏置一个刀具半径,存在刀具半径补偿问题。 数控系统一般具有直线、圆弧轮廓的刀具半径补偿功能, 但要加工非园轮廓时,就需要对轮廓曲线进行离散后再由 数控系统补偿轨迹。 下面是轮廓加工刀具轨迹生成的有关问题与处理算法介绍: 1、轮廓预处理: 轮廓预处理主要是对非圆轮廓曲线段进行离散逼近和对 各轮廓段按一定方向排序。 (1)非圆轮廓曲线段离散逼 当轮廓中有非圆曲线段时,将其预先按逼近精度要求离 散成一系列直线和圆弧段,最终轮廓只包含直线与圆弧。 (2)排序 将轮廓上各线段按一定的走向顺序连接,经离散与排序 后的各轮廓段数据可用链表结构存储。
1)圆弧段离散:将构成约束边界的各环中的所有圆 弧段
均离散成一系列直线段,使约束边界中只包
含直线段。
2)坐标系转换:当给定的走刀方向不平行于Y轴时,则建
立以走刀方向为Y轴方向的计算坐标系,并将原工件坐标 系中的约束边界各节点数据转换到计算坐标系中。
(4)约束边界的融合
当约束边界中包含岛屿偏置环时,实际走刀区域为边 界轮廓偏置环P0与各岛屿轮廓偏置环P1~Pm所围成区域的 布尔差。 可引入虚约束边界段将边界轮廓偏置环与岛屿轮廓偏 置环融为一体,使任意多岛屿的复杂区域均变为无岛屿的 简单区域。
线段B在ri处沿轮廓走向的单 位切矢
线段A在ri处沿轮廓走向的 单位切矢
线段B在节点ri处沿刀具偏置 方向的的单位法矢
线段A在节点ri处沿刀具偏 置方向的的单位法矢
nII=(0,0,1)为刀具轴线方向矢量。当偏置方向在轮廓走 向右侧时,取“+”号,左侧时,取“—”号。 ri是凸点指 和 的夹角大于90度,即 <0
轨迹。
环切法
行切法
1.环形走刀轨迹生成方法
环形走刀的刀具轨迹在实质上都是由型腔轮廓的不断偏置
产生的,因此在原理上它可由轮廓加工刀具轨迹生成算法 的不断重复调用来完成。
对于多岛屿的复杂型腔,环形走刀轨迹生成的主要问题是
多轮廓时的偏置处理问题。
对于环形走刀的刀具轨迹可以从边界轮廓开始逐步向内偏
置生成,也可以从岛屿轮廓开始逐步向外生成,也可以两 个同时进行,即边界轮廓每向内偏置一次,岛屿轮廓也向 外偏置一次,这样交叉进行直到刀具轨迹覆盖整个区域。 刀具轨迹的生成可按下述算法步骤进行: (1)型腔轮廓的预处理 型腔轮廓由边界轮廓和岛屿轮廓构成,他们各自构 成独立的封闭的轮廓。其处理内容就是对各轮廓曲线行离 散逼近及对各轮廓的分别排序。
其具体算法如下:
1)搜索各岛屿偏置环最小X坐标值minxk及其相应节点wk,
其中k为岛屿偏置环的编号(k=1~m);
2)比较各minxk,求其最小值所对应的岛屿轮廓偏置环
Pj(1<=j<=m)。
3)设节点wj的坐标(x,y),过该点作垂直于X坐标轴的直
线,并与边界偏置环P0各直线段求交,得交点串 {ui(x,y),i=1,2,„.n},n为交点数。搜索出交点us(x,ys ),满足ys=min{yi>y,i=1,2,„.n},如图。
5)判别除gi-1、gi、gi+1以外的拐点是否落在由gi至gi-1和gi
至q以及gi-1至q之间所围成的区域。如图两种情况。
6)若无拐点落入该区域,如图a,则认为可分离该区域,
删除拐点gi,综合gi-1与q的信息构成新拐点。
7)若有拐点落入该区域,如图b。
(6)型腔区域加工刀具轨迹的生成
2.偏置轮廓生成
经处理后的轮廓只包含直线段和圆弧段,各段对应的偏置
线段依然是直线段和圆弧段。但其加工轨迹并不是各偏置 线段简单相连得到,否则刀具将与轮廓发生干涉。 干涉分为局部干涉和整体干涉。 (1)局部干涉 局部干涉是相邻两线段相交(即不相切)引起的干涉。 了解几个概念:凸点、凹点、平点。如图。
为oi,其偏置线段的起、终点分别为qi+和qi+1-,则:
R
2)相邻偏置线段过渡处理:根据轮廓上各节点类型对其 相邻偏置线段进行过渡处理,以消除局部干涉。
3)整体干涉检测处理:
首先建立环表,将经过上述处理过的偏置轮廓设为当前环,
然后进行以下处理:
① 确定起始段:在当环中任意选取一偏置轮廓作为进行干
2、等步长逼近离散
等步长逼近是使各相邻离散点间得距离相等,如 图。
ri+1
ri
当前离散点为ri=r(ti),离散步长△L ,下一个离散点ri=r(ti+1) 特点:各离散点距离相等,计算复杂,各个逼近段误 差不保证相等。
3、等误差逼近离散
等误差逼近是使每个逼近段内误差保持一致。 等误差逼近常见的方法有参数筛选法和步长估计法。 (1)参数筛选法 思想:先以小参数步长对原曲线进行密集离散,然后再校
为实现分解,可先确定约束边界在垂直于走刀方向的拐点。 设:qj-1(xj-1,yj-1)、qj(xj,yj)和qj+1(xj+1,yj+1) 若:xj-1≥xj且xj+1≥xj, 则
qj为约束边界在垂直于走刀
方向的一个拐点。
qj+1 qj qj-1
若:xj-1≤xj且xj+1≤xj,qi为拐点
1、等参数的逼近离散
等参数逼近是对曲线参数t进行等距分割(亦即等参数
步长),然后将每个节点的参数值代入曲线表达式中 计算出该点坐标,将各相邻离散点用直线段顺序相连 即构成逼近原曲线的刀具轨迹,如图(1)所示。
特点:算法简单稳定,但参数空间与实际空间非 线性关系,各离散点距离不等,不能保证各逼近 线段与原曲线间误差一致。
3)环的融合处理:
两相交环融合后的结果可形象的如图所示。
4)融合环的干涉处理:
新环1由原环1和2的重叠区域,存在自交,必须将其中包
含的干涉环分离出来。 经过处理后,将得到一个或多个无干涉的有效环,它们即 是精加工型腔轮廓的刀具轨迹。
(3)型腔轮廓的粗加工轨迹生成
将构成精加工刀具轨迹的各组成环均按精加工余量偏置一
直接相连,而应直接在交点处从前一个偏置线段过渡到后 一各偏置线段。 当ri为平点时,不存在局部干涉问题。
(2)整体干涉
当刀具沿着某一轮廓线段的偏置线段运动时,还可能与轮
廓上的其他线段发生干涉(如图),这种干涉为整体干涉。 如何有效地生成、 检测与分离有效环 与干涉环也就是轮 廓加工刀具轨迹生 成中的主要问题。 一个较通用完善的偏 置轮廓生成算法需要 考虑整体干涉与处理 问题。
下面介绍一种偏置轮廓的刀具算法,它包括以下几个步骤:
1)计算各轮廓段的偏置线段:由于直线段的偏置仍为直
线段,而圆弧的偏置线段仍为同心圆,因此偏置线段的计 算只需要求出其起点和终点。
对一直线段,设其起点、终点分别为ri和ri+1,其偏置线段
的起、终点分别为qi+和qi+1-,则:
对一圆弧段,设其起点、终点分别为ri和ri+1,圆弧中心
型腔加工刀具轨迹的生成按各子区域分别进行,其内容包
括各平行切削行的起、终点刀位和切削行间过渡的刀位序 列。
Y轴
xd xe
X轴
各子区域间刀具轨迹的连接即子区域加工顺序的确定 以获得最小空行程为原则。
Us
X
4)融合
插入:ra=rb=us;wj*=wj
5)删除岛屿轮廓偏置环Pj。 6)重复2)到5)直到各岛屿轮廓偏置环均连入P0
(5)走刀区域的分解
将融合后的约束边界围城的走刀区域分解为一系列沿走刀
方向单调的凸子区域,走刀过程再按各子区域分别进行, 并通过优化各子区域的先后走刀顺序而得到较合理的走刀 路线。
(2)型腔轮廓的精加工轨迹生成
将型腔边界轮廓与各岛屿轮廓均按刀具半径偏置一次,得
到型腔轮廓精加工刀具轨迹。具体包括:
1)对边界轮廓和各岛屿轮廓分别进行偏置,得到一系列 不予各自轮廓本身干涉的偏置环。
2)检查各偏置环之间是否相交。
相交性测试:在任何两个可能相交的环之间进行,是对 其中一个环内的所有段与另一环内的所有段两两之间是 否相交进行测试计算。
(6)环的有效性判 断:若一偏置环的走 向与原轮廓的走向一 致,则该环为有效环, 若走向相反,则为干 涉环。然而,这种方 法可能出现错误。
偏置轮廓
4.1.3二维型腔加工
型腔是指具有封闭边界轮廓的平底或曲底凹坑,而且
可能具有一个或多个岛屿。
型腔的加工包括型腔区域 的加工与轮廓(包括边界 与岛屿轮廓)的加工。 要求是:要切净内腔区域 的全部面积不留死角,不 伤轮廓,同时尽可能的提 高加工效率。
qj-1
qj
qj+1
根据拐点链表可将约束边界围城的走刀区域分解成一系列
沿走刀方向单调的凸子区域,步骤如下: 1)搜索拐点链表中X坐标最小的拐点,设为gi(xi,yi); 2)取与gi相邻的两个拐点gi-1(xi-1,yi-1)和gi+1(xi+1,yi+1); 3)比较xi-1与xi+1的值。以下假设xi-1< xi+1。 4)过gi-1作垂直于X轴的直线,它与约束边界上gi至gi+1建 的线段交于q。
对于二维型腔,其实质就是对一个二维区域进行走刀轨迹规 划。 对于三维曲底型腔来说,其刀具轨迹一般也是在二维区域上 进行规划,然后将其投影到型腔底面的刀具偏置面上。
型腔加工刀具轨迹生成方法:环形走刀与平行走刀。
平行走刀法:是以一组相互平行的直线构成刀具运动轨迹。
环形走刀法:是以型腔轮廓的一组偏置轮廓构成刀具运动