6-三菱FX2N系列PLC步进梯形指令详解
FX2N的基本指令、步进指令及编程

4.1基本指令
十三、END END是一条无目标元件占一个程序步的指令。PLC反复进行 输入处理、程序运算、输出处理,若在程序最后写入END指 令,则END以后的程序步就不再执行,直接进行输出处理。 在程序调试过程中,按段插入END指令,可以顺序扩大对各 程序段动作的检查。采用END指令将程序划分为若干段,在 确认处于前面电路块的动作正确无误之后,依次删去END指 令。要注意的是在执行END指令时,也刷新监视时钟。
OR M100 ANI X4
M100
M100
ORI M100
OUT M100
X0 X1
X2
LD X0
ORB OUT M1
M0
X3
OR X1
LDI X2
OR X3
X0 X2
X1
M1
ANB OUT M0 LD X0 AND X1 LD X2
X3
ANI X3
例3 写出语句表并比较
X0 Y0 Y1 X0 Y0 Y0
LD X2 ORI X3
AND M8013 AND M8013 OUT Y0 OUT Y1
4.1基本指令
三、OR、ORI
X0 X2
X1
M5
Y0
LD X0
OR X1
ORI M5
ANI X2
M15
ORI M15
OUT Y0
4.1基本指令
三、OR、ORI
X0 M0
X1 M0 T0 K100
LD X0 OR M0 ANI X1 OUT M0 OUT T0
4.1基本指令
十三、END
END:程序结束指令。END之后的程序 步不再执行。 X0
Y0
END X1 Y0
FX2N 基 本 指 令

FX2N 基本指令一输入输出指令符号功能梯形图表示LD(取) 取常开触点与母线相连┤┝LDI(取反) 取常闭触点与母线相连┤/┝LDP(取上升沿指令) 取常开触点的上升沿相指令┤↑┝LDF(取下降沿指令) 取常开触点的下降沿指令┤↓┝OUT(输出) 线圈驱动─( )二触点串联指令符号功能梯形图表示AND(与) 取常开触电串联连接┤┝┤┝ANDI(与非) 常闭触点串联连接┤/┝┤/┝ANDP 上升沿检测串联指令┤┝┤↑┝AND 下降沿检测串联指令┤┝┤↓┝OR(或) 常开触点并联连接∣─┤┝─∣∣─┤┝─∣ORI(或非) 常闭触点并联连接∣─┤/┝─∣∣─┤/┝─∣三电路块并联和串联指令符号功能梯形图表示ORB(块或) 电路块并联连接∣─┤┝┤┝┤┝∣∣─┤┝┤┝┤┝∣ANB(块与) 电路块串联连接∣┤┝∣┤┝∣∣┤┝┤┤┝∣四置位与复位指令符号功能梯形图表示SET(置位) 动作保持线圈指令┝┤┝[SET YMS] RST(复位) 动作保持清除线圈指令∣┤┝[RST YMS]五脉冲指令符号功能梯形图PLS(上升沿脉冲) 上升沿检测线圈指令∣─┤┝[PLS YM] PLF(下降沿脉冲) 下降沿检测线圈指令∣─┤┝[PLF YM]六主控指令符号功能梯形图表示MC(主控) 公用串行接点线圈指令[MC N0 MY]MCR(主控复位) 公用串行接点接点解除指令[MCR N0 MY]七进栈读栈出栈指令符号功能梯形图表示MPS(进栈) 运算存储MRD(读出) 读出存储MRD(读出) 读出存储或复位八PLC逻辑反.空操作与结束指令(INV NOP END)符号功能梯形图表示INV(取反) 运算结果的反向─━∕━━NOP(无) 空操作END(结束) 程序结束[END]FX2N系列PLC的功能指令表分类FNC N0. 指令助记符功能说明程0 0 CJ 条件跳转序0 1 CALL 子程序调用流0 2 SRET 子程序返回程0 3 IRET 中断返回0 4 EI 允许中断0 5 DI 禁止中断0 6 FEND 主程序结束0 7 WDT 监孔定时器刷新0 8 FOR 循坏的起点与次数0 9 NEXT 循环的终点传 1 0 CMP 比较1 1 ZCP 区间比较送12 MOV 传送1 3 SMOV 位传送与 1 4 CML 取反传送1 5 BMOV 成批传送比 1 6 FMOV 多点传送1 7 XCH 数据交换较 1 8 BCD 二进制转BCD码1 9 BIN BCD码转二进制算 2 0 ADD 二进制加法运算术 2 1 SUB 二进制减法运算逻 2 2 MUL 二进制乘法运算辑 2 3 DIV 二进制除法运算运 2 4 INC 二进制加1运算算 2 5 DEC 二进制减1运算2 6 W AND 字逻辑与2 7 WOR 字逻辑或2 8 WXOR 字逻辑异或2 9 NEG 求二进制补码循 3 0 ROR 循坏右移环 3 1 ROL 循坏左移与 3 2 RCR 带进位右移位 3 3 RCL 带进位左移移 3 4 SFTR 位右移3 5 SFTL 位左移3 6 WSFR 字右移3 7 WSFL 字左移3 8 SFWR FIFO([先入先出)写入3 9 SFRD FIFO([先入先出)读出数 4 0 ZRST 区间复位据 4 1 DECO 解码处 4 2 ENCO 编码理 4 3 SUM 统计ON位数4 4 BON 查询位状态4 5 MEAN 求平均值4 6 ANS 报警器置位4 7 ANR 报警器复位4 8 SQR 求平方根4 9 FLT 整数与浮点数转换高 5 0 REF 输入输出刷新速 5 1 REFF 输入滤波时间调整处 5 2 MTR 矩阵输入理 5 3 HSCS 比较置位(高速记数)5 4 HSCR 比较复位(高速记数)5 5 HSZ 区间比较(高速记数)5 6 SPD 速度检测5 7 PLSY 指定频率脉冲输出5 8 PWM 脉宽调制输出5 9 PLSR 带加减速脉冲输出方 6 0 IST 状态初始化便 6 1 SER 数据查找指 6 2 ABSD 凸轮控制(绝对式) 令 6 3 INCD 凸轮控制(增量式)6 4 TTMR 示教定时器6 5 STMR 特殊定时器6 6 ALT 交替输出6 7 RAMP 斜波信号6 8 ROTC 旋转工作台控制6 9 SORT 列表数据排序外7 0 TKY 10键输入部7 1 HKY 16键输入I/O 7 2 DSW BCD数字开关输入7 3 SEGD 七段码译码7 4 SEGL 七段码分时显示7 5 ARWS 方向开关7 6 ASC ASCII码转换7 7 PR ASCII码打印输出7 8 FROM BFM读出7 9 TO BFM写入8 0 RS 串行数据传送8 1 PRUN 八进制位传送8 2 ASCI 十六进制数转换成A SCII码8 3 HEX ASCII码转换成十六进制数8 4 CCD 校验8 5 VRRD 电位器变量输入8 6 VRSC 电位器变量区间8 7 - -8 8 PID PID运算8 9 - -浮 1 1 0 ECMP 二进制浮点数比较点 1 1 1 EZCP 二进制浮点数区间比较数 1 1 8 EBCD 二进制浮点数→十进制浮点数运 1 1 9 EBIN 十进制浮点数→二进制浮点数算 1 2 0 EADD 二进制浮点数加法1 2 1 EUSB 二进制浮点数减法1 2 2 EMUL 二进制浮点数乘法1 2 3 EDIV 二进制浮点数除法1 2 7 ESQR 二进制浮点数开平方1 2 9 INT 二进制浮点数→二进制整数1 3 0 SIN 二进制浮点数sin运算1 3 1 COS 二进制浮点数cos运算1 32 TAN 二进制浮点数tan运算交换 1 4 7 SW AP 高低字节交换定 1 5 5 ABS ABS当前值读取位 1 5 6 ZRN 原点回归1 5 7 PLSY 可变速的脉冲输出1 5 8 DRVI 相对位置控制1 5 9 DRV A 绝对位置控制时 1 6 0 TCMP 时钟数据比较钟 1 6 1 TZCP 时钟数据区间比较运 1 6 2 TADD 时钟数据加法算 1 6 3 TSUB 时钟数据减法1 6 6 TRD 时钟数据读出1 6 7 TWR 时钟数据写入1 6 9 HOUR 记时仪外 1 7 O GRY 二进制数→格雷码围 1 7 1 GBIN 格雷码→二进制1 7 6 RD3A 模拟量模块(FX0N-3A)1 7 7 WR3A 模拟量(FX0N-3A)XIE写入触 2 2 4 LD= (S1)=(S2)时起始触点接通点 2 2 5 LD> (S1>S2)时起始触点接通比 2 2 6 LD< (S1<S2)时起始触点接通较 2 2 8 LD<> (S1<>S2)时起始触点接通2 2 9 LD≤ (S1≤S2)时起始触点接通2 3 0 LD≥(S1≥S2)时起始触点接通2 3 2 AND= (S1=S2)时串联触点接通2 3 3 AND> (S1>S2)时起串联触点接通2 3 4 AND< (S1<S2)时串联触点接通2 3 6 AND<> (S1<>S2)时起串联触点接通2 3 7 AND≤(S1≤S2)时起时串联触点接通2 3 8 AND≥(S1≥S2)时串联触点接通2 4 0 OR= (S1=S2)时并联触点接通2 4 1 OR> (S1>S2)时并联触点接通2 4 2 OR< (S1=S2)时并联触点接通2 4 4 OR<> (S1<>S2)时并联触点接通2 4 5 OR≤(S1≤S2)时并联触点接通2 4 6 OR≥(S1≤S2)时并联触点接通。
三菱FX系列PLC的步进指令
二、FX2的状态元件分类
类别 初始状态 返回状态 一般状态
元件编号 个数
用途及特点
S0~S9 S10~S19 S20~S499
10
用作SFC的初始状态
10
多运行模式控制当中,用作返回原点 的状态
480
用作SFC的中间状态
掉电保持状态 S500~S899
400
具有停电保持功能,停电恢复后需继 续执行的场合,可用这些状态元件
步进指令的说明:
① 步进接点须与梯形图左母线 连 接 。 使 用 STL 指 令 后 , LD 或 LDI指令点则被右移,所以当把 LD或LDI点返回母线时,需要使 用步进返回指令RET。
② 使用STL指令后的状态继电 器(有时亦称步进继电器), 才具有步进控制功能。这时除 了提供步进常开接点外,还可 提供普通的常开接点与常闭接 点,但STL指令只适用于步进接 点。
4.2.2 步进梯形图
1.状态的三要素:驱动负载、指定转移目标、指定转移条件 2.状态的开启与关闭及状态转移图执行的特点
开启可以理解为该段程序被扫描执行。而关闭则可以理解为该段 程序被跳过,未能扫描执行 3.步进梯形图:使用步进接点指令和步进返回指令梯形图的形式将
状态转移图以梯形图的形式表述出来。 步进指令常用于控制时间和位移等顺序的操作过程。 步进接点只有常开接点,而没有常闭接点。
(8)初始状态可由其他状态驱动,但运行开始必须用其他方法预先作好驱动, 否则状态流程不可能向下进行。一般用系统的初始条件,若无初始条件,可用 M8002(PLC从STOP→RUN切换时的初始脉冲)进行驱动。
(9)需在停电恢复后继续原状态运行时,可使用S500~S899停电保持状态 元件。
4.2.3 多分支状态转移图的处理与梯形图的转换
步进梯形图指令
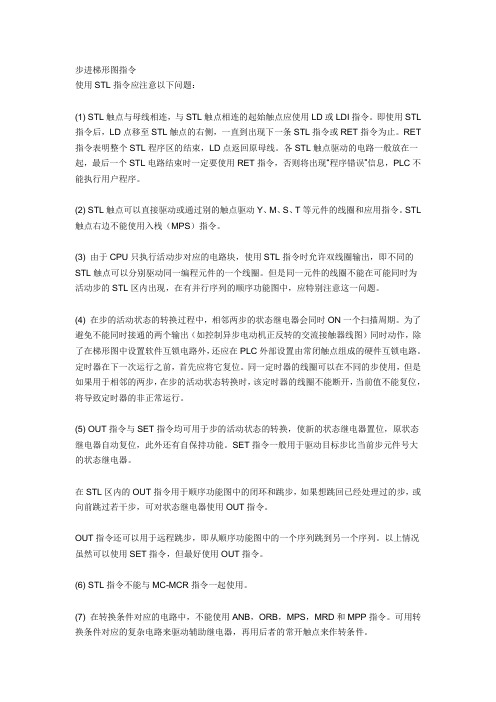
步进梯形图指令使用STL指令应注意以下问题:(1) STL触点与母线相连,与STL触点相连的起始触点应使用LD或LDI指令。
即使用STL 指令后,LD点移至STL触点的右侧,一直到出现下一条STL指令或RET指令为止。
RET 指令表明整个STL程序区的结束,LD点返回原母线。
各STL触点驱动的电路一般放在一起,最后一个STL电路结束时一定要使用RET指令,否则将出现“程序错误”信息,PLC不能执行用户程序。
(2) STL触点可以直接驱动或通过别的触点驱动Y、M、S、T等元件的线圈和应用指令。
STL 触点右边不能使用入栈(MPS)指令。
(3) 由于CPU只执行活动步对应的电路块,使用STL指令时允许双线圈输出,即不同的STL触点可以分别驱动同一编程元件的一个线圈。
但是同一元件的线圈不能在可能同时为活动步的STL区内出现,在有并行序列的顺序功能图中,应特别注意这一问题。
(4) 在步的活动状态的转换过程中,相邻两步的状态继电器会同时ON一个扫描周期。
为了避免不能同时接通的两个输出(如控制异步电动机正反转的交流接触器线图)同时动作,除了在梯形图中设置软件互锁电路外,还应在PLC外部设置由常闭触点组成的硬件互锁电路。
定时器在下一次运行之前,首先应将它复位。
同一定时器的线圈可以在不同的步使用,但是如果用于相邻的两步,在步的活动状态转换时,该定时器的线圈不能断开,当前值不能复位,将导致定时器的非正常运行。
(5) OUT指令与SET指令均可用于步的活动状态的转换,使新的状态继电器置位,原状态继电器自动复位,此外还有自保持功能。
SET指令一般用于驱动目标步比当前步元件号大的状态继电器。
在STL区内的OUT指令用于顺序功能图中的闭环和跳步,如果想跳回已经处理过的步,或向前跳过若干步,可对状态继电器使用OUT指令。
OUT指令还可以用于远程跳步,即从顺序功能图中的一个序列跳到另一个序列。
以上情况虽然可以使用SET指令,但最好使用OUT指令。
第7章 三菱FX2N系列PLC的基本指令及编程

❖ 3 ) OUT(Out):表示线圈驱动指令,用于将逻辑运 算的结果驱动一个指定的线圈。也叫输出指令。将 运算结果输出到指定的继电器,是驱动线圈的输出指 令。
指令使用方法如图7-1 、图7-2 所示.
精选可编辑ppt
11
图7-1 LD、LDI、OUT指令
精选可编辑ppt
12
图7-2 LD、LDI、OUT指令
❖ 对大型PLC设备,为了完成比较复杂的 控制,有时采用BASIC等计算机高级语言,使 PLC的功能更强大。
精选可编辑ppt
7
7.2 FX2N系列PLC技术特点
❖ 1 ) FX2N系列PLC采用一体化箱体结构,将CPU、 存储器、输入输出接口及电源等都集成在一个模块
内,结构紧凑,体积小巧,成本低,安装方便。
入信号跳变时产生一个宽度为扫描周期的脉 冲。 如图7-10所示。
精选可编辑ppt
27
图7-10 a PLS、PLF指令
精选可编辑ppt
28
图7-10 b PLS、PLF指令
精选可编辑ppt
29
❖7.3.9 MC、MCR指令
❖
指令用法
❖
1)MC:主控开始指令, 公共串联接点的
连接指令(公共串联接点另起新母线)。
❖ 数字7 )开F关X2、N还方有向矩开阵关输、入7段、显10示键器输扫入描、显16示键等输指入令、。 ❖ 基 用本插8 )单 件F元 式X2输IN/OC入的点输性为出能16,指/3用标2/扁6与4平F/9X电62,N缆基所连本不接相同,同的体,是积FFX更X22N小NCC的。采
精选可编辑ppt
9
7.3 FX2N系列PLC的基本指令
精选可编辑ppt
8
第3章三菱FX2N系列可编程控制器的步进指令
3.2 步进指令及多流程步进顺序控制
3.2.2 单流程步进顺序控制
所谓单流程,是指状态转移只可能有一种顺序,没有 其它可能。
1.状态转移图的设计
(1)将整个工作过程按任务要求分解,其中 的每个工序均对应一个状态,并分配状态元件。
①准备(初始状态) ②启动电动机1 ③启动电动机2 ④启动电动机3 ⑤停止电动机3 ⑥停止电动机2 ⑦停止电动机1 S0 S20 S21 S22 S23 S24 S25
活且转移条件满足时才能被激活,同时一旦下一个状态被激
活,上一个状态自动关闭。因此,对于单流程状态转移图来 说,同一时间,只有一个状态是处于激活状态的。 (4)若为顺序连续转移(即按状态继电器元件编号顺序向 下),使用SET指令进行状态转移;若为顺序不连续转移, 不能使用SET指令,应改用OUT指令进行状态转移。
S0 S20 S21 S22 S23 S24 转移条件 转移条件 转移条件 转移条件 转移条件 转移条件 按下SB1 按下SB2 按下SB3 按下SB4 按下SB5 按下SB6
a)单一条件 b)多条件组合 图3-9 状态的转移条件
3.2.2 单流程步进顺序控制
图3-10 电动机顺序控制系统状态转移图
想一想 练一练
练习思考题:三台电动机的顺序控制(二)。 要求用一只启动按钮(SBl)和一只停止按钮 (SB3)实现三台电动机的顺序启停控制,每按 一次按钮能顺序启停一台电动机。PLC接线及电 气控制原理图参考图3-1 b),工序图如图3-14, 要求1)根据所示的状态转移图,设计梯形图; 2)将梯形图转换成指令表。
2.RET:步进返回指令
RET指令没有操作元件。RET指令的功能是:当步进顺控程序执行完 毕时,使子母线返回到原来主母线的位置,以便非状态程序的操作在 主母线上完成,防止出现逻辑错误。
三菱FX2NPLC步进指令简介及编程举例
三菱FX2NPLC步进指令简介及编程举例
在FX2N系列PLC中只有两条步进指令:STL(步进开始指令)和RET(步进结束指令)。
STL和RET指令必须和状态继电器S配合使用才具有步进功能。
STL也称为步进触点指令(占1步),STL的梯形图符号用表示,称为STL触点,它没有动断触点。
STL S20 和STL S21都是STL触点。
在梯形图中,STL触点与母线相连,使用STL指令后,母线移至触点右侧,其后需用LD、LDI、OUT等指令,直至出现下一条STL指令或出现RET指令。
STL指令使新状态继电器置位,而前一状态继电器自动复位,其触点断开。
图10-1表明了顺序功能图、梯形图、语句表三者之间的严格对应关系。
步进结束指令RET也称为步进返回指令,梯形图符号用表示。
在一系列STL指令之后必须使用RET指令,以表示步进指令功能结束,母线恢复至原位。
三菱FX系列PLC基本指令应用
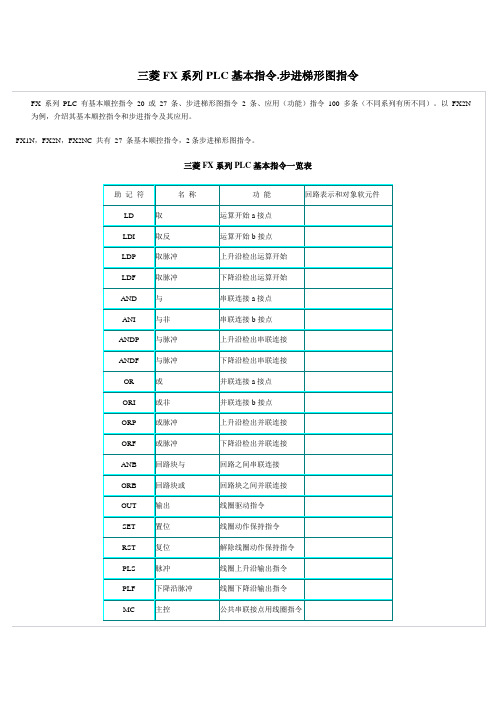
图 1 取指令与输出指令的使用取指令与输出指令的使用说明:1 )LD 、LDI 指令既可用于输入左母线相连的触点,也可与ANB 、ORB 指令配合实现块逻辑运算;2 )LDP 、LDF 指令仅在对应元件有效时维持一个扫描周期的接通。
图3-15 中,当M1 有一个下降沿时,则Y3 只有一个扫描周期为ON 。
3 )LD 、LDI 、LDP 、LDF 指令的目标元件为X 、Y 、M 、T 、C 、S ;4 )OUT 指令可以连续使用若干次(相当于线圈并联),对于定时器和计数器,在OUT 指令之后应设置常数K 或数据寄存器。
5 )OUT 指令目标元件为Y 、M 、T 、C 和S ,但不能用于X 。
FX系列PLC —触点串联指令(AND/ANI/ANDP/ANDF)( 1 )AND (与指令)一个常开触点串联连接指令,完成逻辑“与”运算。
( 2 )ANI (与反指令)一个常闭触点串联连接指令,完成逻辑“与非”运算。
( 3 )ANDP 上升沿检测串联连接指令。
( 4 )ANDF 下降沿检测串联连接指令。
触点串联指令的使用如图 1 所示。
图 1 触点串联指令的使用触点串联指令的使用的使用说明:1 )AND 、ANI 、ANDP 、ANDF 都指是单个触点串联连接的指令,串联次数没有限制,可反复使用。
2 )AND 、ANI 、ANDP 、ANDF 的目标元元件为X 、Y 、M 、T 、C 和S 。
3 )图1 中OUT M101 指令之后通过T1 的触点去驱动Y4 称为连续输出。
FX系列PLC —触点并联指令(OR/ORI/ORP/ORF)( 1 )OR (或指令)用于单个常开触点的并联,实现逻辑“或”运算。
( 2 )ORI (或非指令)用于单个常闭触点的并联,实现逻辑“或非”运算。
( 3 )ORP 上升沿检测并联连接指令。
( 4 )ORF 下降沿检测并联连接指令。
触点并联指令的使用如图 1 所示。
图 1 触点并联指令的使用触点并联指令的使用说明:1 )OR 、ORI 、ORP 、ORF 指令都是指单个触点的并联,并联触点的左端接到LD 、LDI 、LDP 或LPF 处,右端与前一条指令对应触点的右端相连。
F2N步进指令
MC/MCR
可以使用 可以使用 可以使用
可以使用 可以使用 不可使用
不可使用 不可使用 不可使用
输出 处理
转移 处理
表中的栈操作指令 MPS/MRD/MPP 在状态内不能直接 与步进接点后的新 母线连接,应接在 LD或LDI指令之后, 如图7—2所示。
LD X001 S10 X001 MPS MRD STL内母线 MPP X004 X005 Y001 Y001 X003 Y001
三、状态转移图(SFC)转换成状态梯形图(STL)、指令表程序
SFC图基本上是以机械控制的流程表示状态(工序)的 流程,而STL图全部是由继电器来表示控制流程的程序。
LD SET STL LD SET STL LDI OUT LD SET STL LDI OUT LD SET STL OUT LD SET STL LDI OUT LD SET STL LDI OUT LD OUT RET END
台车自动往返一个工作周期的控制工艺要求如下: (1)按下启动钮SB,电机M正转,台车前进,碰到限位开关 SQ1后,电机M反转台车后退。 (2)台车后退碰到限位开关SQ2后,台车电机M停转,台车 停车5s后,第二次前进碰到限位开关SQ3,再次后退。 (3)当后退再次碰到限位开关SQ2时,台车停止。
SB(X000) 启动 前进(Y021) 后退(Y023)
驱动M第一次前进
驱动M第一次后退
暂停5秒
驱动M第二次前进
驱动M第二次后退 步进程序结束返回S0
图7-8 台车自动往返控制的状态梯形图(STL图规则
一、编制SFC图的注意事项 (1)对状态编程时必须使用步进接点指令STL。程序的最后必 须使用步进返问指令RET,返回主母线。 (2)初始状态的软元件用S0-S9,并用双框表示;中间状态软 元件用S20-S899等状态,用单框表示。若需要在停电恢 复后继续原状态运行时,可使用S500-S899停电保持状态 元件。此外S10-S19在采用状态初始化指令FNC 60(IST) 时,可用于特殊目的。 (3)状态编程顺序为:先进行驱动,再进行转移,不能颠倒。 (4)当同一负载需要连续多个状态驱动时,可使用多重输出, 在状态程序中,不同时“激活”“双线圈”是允许的。另 外,相邻状态使用的T、C元件,编号不能相同。
三菱FX2-FNC 应用指令集
三菱FX系列PLC基本指令一览表三菱FX2N应用指令集6-1程序流程应用指令1、FNC(CJ)跳转指令2、FNC01 FNC02 FNC06(CALL SRET FEND)调用子程序3、FNC03 FNC04 FNC05(IRET EI DI)中断处理4、FNC07(WDT)看门狗定时器5、FNC08 FNC09(FOR NEXT)程序循环6-2数据传送、区域比较应用指令1、FNC10(CMP)比较2、FNC11(ZCP)区域比较3、FNC12(MOV)传送应用指令4、FNC13 (SMOV)数据移位应用指令5、FNC14(CML)数据反相传送应用指令6、FNC15 (BMOV)成批传送7、FNC16 (FMOV)多点传送应用指令8、FNC17 (XCHP)数据交换9、FNC18(BCD)将BIN转换为BCD10、FNC19(BIN)将BCK转换为BIN6-3四则运算逻辑应用指令1、FNC20(ADD)加法应用指令2、FNC21(SUB)减法3、FNC22(MUL)二进制乘法4、FNC23(DIV)二进制除法5、FNC24(INC)增加6、FNC25(DEC)减少7、FNC26(WAND)逻辑与8、FNC27(WOR)逻辑或9、FNC28(WXOR)二进制互斥逻辑异或10、FNC29(NEG)求补码6-4旋转、位移应用指令1、FNC30、FNC31(RORP、ROLP)左、右旋转2、FNC32 FNC33(RCRP、RCLP)包含进位标识的左、右旋转3、FNC34、FNC35(SFTRP、SFTLP)位数据左、右移4、FNC36、FNC37(WSFRP、WSFLP)字符数据左、右移5、FNC38、FNC39(SFWRP、WFRDP)字符数据位移写入与读出6-5数据处理应用指令1、FNC40(ZRST)区域数据复位2、FNC41(DECO)译码3、FNC42(ENCO)编码4、FNC43(SUM)ON位总数计算5、FNC44(BON)ON位判断6、FNC45(MEAN)平均值7、FNC46、FNC47(ANS、ANR)警报线圈的输出与复位8、FNC48(SQR)开平方6-6高速处理应用指令1、FNC50(RER)输入/输出信号立即处理2、FNC51(REFF)改变输入端响应时间3、FNC52(MTP)矩阵输入4、FNC53(DHSCS)高速计数器比较设置5、FNC54(DHSCR)高速计数器比较复位6、FNC55(DHSZ)高速计数器区域比较7、FNC56(SPD)脉冲密度8、FNC57(PLSY)脉冲输出9、FNC58(PWM)脉冲宽度调制10、FNC59(PLSR)加减速脉冲输出6-7宏应用指令1、FNC60(IST)步进运转状态设定2、FNC61(SER)多笔数据比较3、FNC62(ABSD)绝对式控制4、FNC63(INCD)相对式控制5、FNC64(TIMR)调整式定时器6、FNC65(STMR)特殊定时器7、FNC66(ALTP)交替信号8、FNC67(RAMP)求斜率9、FNC69(SORT)数据排序6-8外部设定显示应用指令1、FNC70(TKY)10个按钮输入2、FNC71(HKY)16个按钮键输入3、FNC72(DSW)指拨开关4、FNC73(SEGD)7段数码管译码5、FNC74(SEGL)7段数码扫描6、FNC75(ARWS)箭头开关外部设定调整。
三菱FX2n 状态转移图与步进梯形指令
第三节
状态转移图及步进梯形图应用示例
单流程:指状态转移只有一种顺序 【应用系统设计】 简易红绿灯控制系统
X0
T0
T1
T2
T3
SET在步进梯形图 STL与SET指令之间 STL为状态动作的
中,作为状态转 的部分为该状态所 需做的动作。 移指令使用。
步进起始指令
用LD或LDI指令设 用 OUT 指令设 置转移条件 以 STL 指令开始 用 SET 指令 置动作 设置动作母线 设置状态
【应用范例】装卸小车运动控制 装卸小车运动控 制要求:
按下启动按钮,小车底门关闭 ,小车从起始位置(向前运 动(Y000接通。 小车到达最前端位置,停止,漏斗翻门打开,货物通过漏 斗卸下。 7s后自动关闭漏斗翻门,小车向后运动。 至后限位开关位置,小车停止,小车底门打开,将小车中 货物卸下;5s后自动关闭小车翻门(Y003断开)。 分单次运行和连续运行两种运行方式。
小车运动顺序控制状态转移图
如上图小车顺序运动控制中,S0表示初始状态,S20~ S23分别代表工序一至工序四的状态,其顺序控制工作过程 如下: ① PLC运行时,M8002脉冲信号驱动初始状态S0。 ② 当启动按钮X000接通,小车处于后限位位置(X002= ON),小车翻门关闭(Y003=OFF),工作状态从S0转 移到S20。 ③ 状态S20驱动后,输出Y000接通,小车向前运动,直至前 限位(X001= ON),工作状态从S20转移到S21。 ④ 状态S21驱动后,输出Y001接通,漏斗翻门打开,同时定 时器T3接通,7s后,定时器T3触点接通,工作状态从S21 转移到S22。
1
每个状态提供了三个功能:驱动处理、转移条件及相继状态。如在状态 S20,驱动接通输出Y000,当转移条件X001接通后,工作状态从S20转移 到相继状态S21,状态S20自动复位。 状态S具有触点的功能(驱动输出线圈或相继的状态)以及线圈的功能 (在转移条件下被驱动)。
三菱FX系列PLC基本指令步进梯形图指令
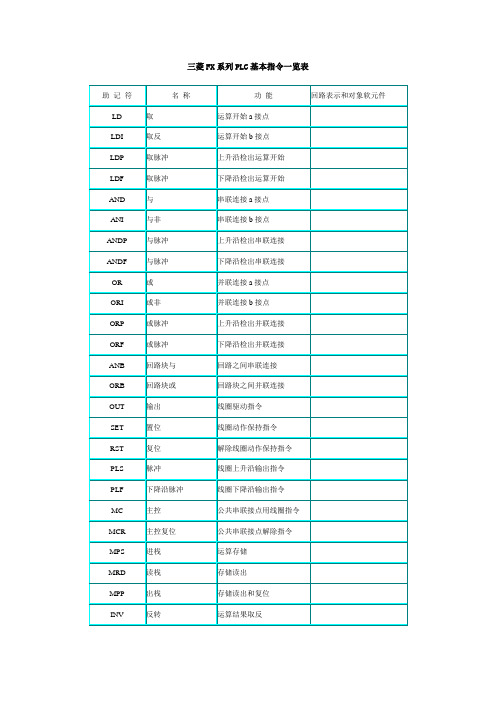
三菱FX系列PLC基本指令.步进梯形图指令FX 系列PLC 有基本顺控指令20 或27 条、步进梯形图指令2 条、应用(功能)指令100 多条(不同系列有所不同)。
以FX2N 为例,介绍其基本顺控指令和步进指令及其应用。
FX1N,FX2N,FX2NC 共有27 条基本顺控指令,2条步进梯形图指令。
三菱FX系列PLC基本指令一览表FX系列PLC —取指令与输出指令(LD/LDI/LDP/LDF/OUT)( 1 )LD (取指令)一个常开触点与左母线连接的指令,每一个以常开触点开始的逻辑行都用此指令。
( 2 )LDI (取反指令)一个常闭触点与左母线连接指令,每一个以常闭触点开始的逻辑行都用此指令。
( 3 )LDP (取上升沿指令)与左母线连接的常开触点的上升沿检测指令,仅在指定位元件的上升沿(由OFF → ON )时接通一个扫描周期。
( 4 )LDF (取下降沿指令)与左母线连接的常闭触点的下降沿检测指令。
( 5 )OUT (输出指令)对线圈进行驱动的指令,也称为输出指令。
取指令与输出指令的使用如图 1 所示。
图 1 取指令与输出指令的使用取指令与输出指令的使用说明:1 )LD 、LDI 指令既可用于输入左母线相连的触点,也可与ANB 、ORB 指令配合实现块逻辑运算;2 )LDP 、LDF 指令仅在对应元件有效时维持一个扫描周期的接通。
图3-15 中,当M1 有一个下降沿时,则Y3 只有一个扫描周期为ON 。
3 )LD 、LDI 、LDP 、LDF 指令的目标元件为X 、Y 、M 、T 、C 、S ;4 )OUT 指令可以连续使用若干次(相当于线圈并联),对于定时器和计数器,在OUT 指令之后应设置常数K 或数据寄存器。
5 )OUT 指令目标元件为Y 、M 、T 、C 和S ,但不能用于X 。
FX系列PLC —触点串联指令(AND/ANI/ANDP/ANDF)( 1 )AND (与指令)一个常开触点串联连接指令,完成逻辑“与”运算。
顺序功能图转梯形图总结三菱FX2N系列PLC

顺序功能图转梯形图总结三菱FX2N系列PLC 顺序功能图转换成梯形图的三种方法。
画顺序功能图并将其用三种方法转换成梯形图 1.换顺序功能图1)分析题设,将系统分成若干步,每步的动作都要清晰,步之间的转换条件要确定好。
2)在题意完全清晰的基础上,画出顺序功能图。
首先确定步所用的编程元件:启保停和以转换为中心——MM8002 步进指令——SM0如图: 初始步:双矩形框;M8002;M0或S0~S9初始步和动作不之间的转换条件有三种情况:启动开关;初始位;两者的逻辑与动作步:矩形框;M1或S20 M1 Y1动作画在动作步的右侧3)按照题意将所有的不全部画出来。
循环序列:单周期和连续工作单周期(只工作一次就回到初始位置停止)——顺序功能图中返回到初始步上边连续工作(执行一次后接着继续工作,知道按下停止按键为止)——返回到第一动作步上边将顺序功能图转换成梯形图方法一:启保停步和步之间的转换实现原则:前级步为活动,转换条件成立如上图所示,M1步为活动步且X1接通时,M2转换成活动步,用启保停表达出来,谁变成活动步,就是启动哪一步。
启动条件:前几步的常开触点与转换条件串联,停止条件:后续步的常闭触点。
例题:液体混合装置如图所示,上限位X0、中限位X1、下限位X2传感器被液体淹没时为ON,阀A、阀B、阀C为电磁阀,线圈通电时打开,线圈断电时关闭。
开始时容器是空的,各阀门均关闭,各传感器均为OFF。
按下启动按钮X10后,打开阀门A,液体A流入容器。
中限位,关闭阀门A,打开阀门B,液体B流入容器。
当液面到达上X1为ON限位X0,关闭阀门B,电动机M开始运行,搅动液体。
60s后停止搅动,打开阀门C,放出混合液。
当液面下降至下限位X2之后5s,容器放空,关闭阀C,打开阀A,又开始下一周期的操作。
按下停止按钮X11,在当前工作周期的操作完成结束后,才停止操作(停在初始状态)。
画出控制系统的顺序功能图,并使用启保停电路的编程方法将其转换为梯形图。
三菱FX2N系列可编程控制器步进阶梯指令
• 例:液体混合装置。
– 上限位、下限位和中限位液位传感器被液体淹没时为 ON,电磁阀A、B和C的线圈通电时打开,线圈断电时 关闭。初始状态时容器是空的,各阀门均关闭,各传 感器均为OFF。
– 按下起动按钮后,打开阀A,液体A流入容器,中限位 开关变为ON时,关闭阀A,打开阀B,液体B流人容器。 液面到达上限位开关时,关闭阀B,电动机M开始运行, 搅拌液体,60 s后停止搅拌,打开阀C,放出混合液, 液面降至下限位开关之后再过5s,容器放空,关闭阀C, 打开阀A,又开始下一周期的操作。按下停止按钮,在 当前工作周期的操作结束后,才停止操作(停在初始 状态)。
• 例:动力头控制系统的顺序功能图和梯形 图
• 注:
– 如某一输出量仅在某一步中为1状态,可将它们 的线圈分别与对应步的辅助继电器线圈并联, 如图中的Y0、 Y2、T0。
– 如某一输出量在几步中都为1状态,为避免出现 双线 圈现象,应将代表各有关步的辅助继电器 的常开触点 并联后驱动该输出继电器的线圈。 例图中的Y1。
• 2、选择序列的编程方法
– (1)选择序列的分支的编程方法
如果某一步的后面有一个 由N条分支组成的选择序 列,则应将N个后续步对 应的辅助继电器的常闭触 点与该步的线圈串联作为 结束该步的条件。
– (2)选择序列的合并的编程方法
如果某一步之前有N个转 换,则代表该步的辅助继 电器的启动电路由N条支 路并联而成,各支路由各 前级步对应的辅助继电器 的常开触点与相应转换条 件对应的触点或电路串联 而成。
环,相应的辅助继电器将不能“通电”,为解决 此问题应增设一中间单元,如下图所示:
X2 X3
二、以转换为中心的编程方法
• 1、中心思想:以顺序功能图中的转换为中 心,使用置位、复位指令的编程方法。
三菱FX系列PLC基本指令步进梯形图指令
三菱FX系列PLC基本指令.步进梯形图指令FX 系列PLC 有基本顺控指令20 或27 条、步进梯形图指令2 条、应用(功能)指令100 多条(不同系列有所不同)。
以FX2N 为例,介绍其基本顺控指令和步进指令及其应用。
FX1N,FX2N,FX2NC 共有27 条基本顺控指令,2条步进梯形图指令。
三菱FX系列PLC基本指令一览表FX系列PLC —取指令与输出指令(LD/LDI/LDP/LDF/OUT)( 1 )LD (取指令)一个常开触点与左母线连接的指令,每一个以常开触点开始的逻辑行都用此指令。
( 2 )LDI (取反指令)一个常闭触点与左母线连接指令,每一个以常闭触点开始的逻辑行都用此指令。
( 3 )LDP (取上升沿指令)与左母线连接的常开触点的上升沿检测指令,仅在指定位元件的上升沿(由OFF → ON )时接通一个扫描周期。
( 4 )LDF (取下降沿指令)与左母线连接的常闭触点的下降沿检测指令。
( 5 )OUT (输出指令)对线圈进行驱动的指令,也称为输出指令。
取指令与输出指令的使用如图 1 所示。
图 1 取指令与输出指令的使用取指令与输出指令的使用说明:1 )LD 、LDI 指令既可用于输入左母线相连的触点,也可与ANB 、ORB 指令配合实现块逻辑运算;2 )LDP 、LDF 指令仅在对应元件有效时维持一个扫描周期的接通。
图3-15 中,当M1 有一个下降沿时,则Y3 只有一个扫描周期为ON 。
3 )LD 、LDI 、LDP 、LDF 指令的目标元件为X 、Y 、M 、T 、C 、S ;4 )OUT 指令可以连续使用若干次(相当于线圈并联),对于定时器和计数器,在OUT 指令之后应设置常数K 或数据寄存器。
5 )OUT 指令目标元件为Y 、M 、T 、C 和S ,但不能用于X 。
FX系列PLC —触点串联指令(AND/ANI/ANDP/ANDF)( 1 )AND (与指令)一个常开触点串联连接指令,完成逻辑“与”运算。
第6章 FX2N 系列PLC的步进指令及顺序功能图

Date: 2017/3/8
Page: 6
第6章 FX2N 系列PLC的步进指令及顺序功能图
6.3 顺序功能图及步进指令编程举例 6.3.1 十字路口交通信号灯控制
Date: 2017/3/8
Page: 7
第6章 FX2N 系列PLC的步进指令及顺序功能图
6.3.1 十字路口交通信号灯控制
1 控制要求:
Page: 15
第6章 FX2N 系列PLC的步进指令及顺序功能图
Date: 2017/3/8
Page: 16
X001 X000
SET STL SET STL
S0 S0 S20 S20 Y000 S21 S21 Y001 S22 S22 Y002 S23 S23 Y003
Y0-汽缸B下降
X004
SET STL
Y1-汽缸C抓紧
X006
SET STL
Y2-汽缸B上升
X003
SET STL
Y3-汽缸A左移
X002
Date: 2017/3/8
P进指令及顺序功能图
本章小结
本章主要介绍了步进指令、顺序功能图类型及设计步 骤、顺序功能图到步进梯形图的转换方法、步进梯形图设 计注意事项。并结合实例详细分析了单流程设计、选择分 支与汇合流程设计和并进分支与汇合流程设计。
Date: 2017/3/8
[ STL ] LD X005 X005 (Y002) 插入常闭 触点 (Y003) (b) 正确的驱动方法 位置变换 (Y003) [ STL ]
GX Develper版 编程软件的STL 指令的梯形图 (Y002)
M8000 (Y003) (a) 错误的驱动方法
M005 (Y002) (c) 正确的驱动方法
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PLC运行时,M8002脉冲信号驱动初始状态S0。 当启动按钮X000接通,小车处于后限位位置X002=ON,小 车翻门关闭Y003=OFF,工作状态从S0转移到S20。 状态S20驱动后,输出Y000接通,小车向前运动,至前限位 X001=ON,工作状态从S20转移到S21。 状态S21驱动后,输出Y001接通,漏斗翻门打开,同时定时 器T3接通,7s后,定时器T3触点接通,工作状态从S21转移到 S22。 状态S22驱动后,输出Y002接通,小车向后运动,至后限位 X002=ON,工作状态从S22转移到S23。 状态S23驱动后,输出Y003接通,小车翻门打开,同时定时 器T4接通,5s后,定时器T4触点接通。此时,如果小车运行 工作方式处于单循环方式(X011接通),工作状态从S23转移 到S0,小车回到原初始状态,等待启动按钮重新按下,开始 第二次循环;如果小车运行工作方式处于自动循环方式 (X010接通),工作状态从S23转移到S20,小车重复S20~ S23的工作过程。
状态编程思想
状态编程思想:将一个复杂的控制过程分解为若干个工作状态,弄清各状态的工作细 节(状态的功能、转移条件和转移方向),再依总的控制顺序要求,将这些状态联系起 来,形成状态转移图,进而编制梯形图程序。将“工序”更换为“状态”,就得到状态 转移图,是状态编程法的重要工具。 FX2N系列PLC的状态器S,是为状态编程提供的软元件。小车顺序运动控制中,S0表 示初始状态,S20~S23分别代表工序一至工序四的状态,其顺序控制工作过程如下:
每个状态提供的功能:驱动处理、转移条件及相继状态。如状态S20,驱动接通输出 Y000,当转移条件X001接通后,工作状态从S20转移到相继状态S21,状态S20自动复位。 状态S具有的功能: 触点功能:驱动输出线圈或相继的状态 线圈功能:在转移条件下被驱动
2018/10/12
电气控制与PLC
PLC从STOP→RUN时,初始状态S0动作,车道信号灯 为绿灯,人行道信号灯为红灯。 按下人行道信号灯控制按钮X000或X001,状态S21控制 车道信号灯为绿灯,状态S30控制人行道信号灯为红灯。 30s钟后,状态S22控制车道信号灯变为黄灯;再过10s钟, 状态S23控制车道信号灯变为红灯。人行道信号灯仍为红 灯不变。 此后,定时器T2起动,5s后,状态S31控制人行道信号 灯变为绿灯。车道信号灯为红灯不变。 15s后,人行道绿灯开始闪烁(状态S32时人行道信号绿 灯熄灭,状态S33时人行道信号绿灯亮)。车道信号灯为 红灯不变。 闪烁时,S32、S33反复动作,计数器C0计数5次时,触 点接通,动作状态向S34转移,人行道信号灯变为红灯。 5s后返回初始状态S0。 动作过程中,控制按钮X000或X001无效。
4
小车顺序控制步进梯形图
2018/10/12
电气控制与PLC
5
步进梯形指令特点及注意事项
步进梯形指令仅对状态器S有效,对于用作一般辅助继电器的状态器S,不能采用STL 指令,而只能采用基本指令。在STL指令后,只能采用SET和RST指令作为状态器S的置 位或复位输出。STL指令与取指令LD相比较有一定的特点:
相对某个具体的工序来说,控制任 务实现了简化,给局部程序的编制带 来了方便。 整体程序是局部程序的综合,只要 弄清楚各工序成立的条件,工序转移 的条件和转移的方向,就可以进行这 类图形的设计。 图很容易理解,可读性强,能清楚 地反映全部控制工艺过程。
2018/10/12
电气控制与PLC
2
2018/10/12
电气控制与PLC
16
交叉路口红绿灯控制步进梯形图
2018/10/12
电气控制与PLC
17
交叉路口红绿灯控制步进梯形图
2018/10/12
电气控制与PLC
18
交叉路口红绿灯控制步进梯形指令
2018/10/12
电气控制与PLC
19
不能直接编程状态转移图变换
运用状态编程思想解决问题时,当状态转移图设计出来后,有些状态转移图不单单是 某一种分支、汇合流程,往往是若干个或若干类分支、汇合流程的组合。如上述人行道 与车道交叉路口红绿灯控制的状态转移图,并行分支、汇合中存在选择性分支。 只要严格按照分支、汇合的原则和方法,就能对状态转移图编程。 对于某些不能直接编程的分支、汇合组合流程,需要经过某些变换,才能进行编程。
2018/10/12
电气控制与PLC
21
2018/10/12
电气控制与PLC
3
步进梯形指令
FX2N系列PLC步进梯形指令:采用步进梯形图编制顺序控制状态转移图程序的指令, 包括STL和RET两条指令。 步进梯形指令STL:利用内部状态软元件,在顺控程序上进行工序步进控制的指令。 返回RET指令:表示状态流程结束,用于返回主程序的指令。
电气控制与PLC
8
电机顺序起停控制步进梯形图
2018/10/12
电气控制与PLC
9
电机顺序起停控制步进梯形指令
2018/10/12
电气控制与PLC
10
选择性分支
选择性分支:从多个流程顺序中选择执行某一个流程。 FX2N系列PLC一条选择性分支的支路数不能超过8条,初始状态对应有多条选择性分支 时,每个初始状态的支路总数不能超过16条。 选择性分支示例:使用传送带, 将大、小球分类选择传送。左上方 为原点,传送机械的动作顺序为下 降、吸住、上升、右行、下降、释 放、上升、左行。机械臂下降,当 电磁铁压着大球时,下限位开关LS2 断开,压着小球时,LS2导通。 根据LS2的状态(即对应大、小球) 有两个分支,此处为分支点,且属 于选择性分支。分支在机械臂下降 之后根据LS2的通断,分别将球吸住、 上升、右行到LS4(小球位置X004 动作)或LS5(大球位置X005动作) 处下降,此处应为汇合点。然后再 释放、上升、左移到原点。
步进梯形指令应用注意事项:
状态器编号不能重复使用。 STL触点断开时,与其相连的回路不动作,一个扫描周期后不再执行 STL指令。 状态转移过程中,在一个扫描周期内两种状态同时接通,因此为了避免不能同时接通的一对输出 同时接通,除了在PLC外部设置互锁外,在相应的程序上也应设置互锁。 定时器线圈与输出线圈一样,也可在不同状态间对同一定时器软元件编程,但是,在相邻状态下 对同一定时器编程时,则状态转移时定时器线圈不断开,当前值不能复位,因此需要注意在相邻状 态不要对同一定时器编程。 STL指令后的母线,一旦写入LD或LDI指令后,对于不需要触点的指令,必须采用 MPS、MRD、 MPP指令编程,或者改变回路的驱动顺序。 在中断程序与子程序内不能采用STL指令。 STL指令内不禁止使用跳转指令,但由于动作复杂,建议不要使用。
小车运动手动控制
小车手动控制运行过程: 小车向前运动:手动操作按钮X004接通,并且小车底门关闭(Y003断开)时,小车向 前运动(Y000接通)并且停止在最前端位置(Y000断开,前限位开关X001接通); 漏斗翻门控制:手动超作按钮X006接通,漏斗翻门打开(Y001接通),货物通过漏斗 卸下,7s后自动关闭漏斗翻门(Y001断开); 小车向后运动:手动操作按钮X005接通,小车向后运动(Y002接通)至后限位开关位 置停止(Y002断开,后限位开关X002接通); 小车翻门控制:手动操作按钮X007接通,小车底门打开(Y003接通),将小车中货物 取下;5s后自动关闭小车翻门(Y003断开)。
2018/10/12
电气控制与PLC
1
小车运动顺序控制
小车手动控制每一个运动过程都需要人为手动操作。为提高生产效率,要求在满足初 始条件时,小车能够按照工艺要求顺序地自动循环各个生产步骤。将小车的各个工作步 骤用工序表示,并依工作顺序将工序连接成顺序控制图,其特点是:
将复杂的任务或过程分解成若干个 工序。无论多复杂的顺序控制过程均 能分化成小的工序,有利于程序的结 构化设计。
2018/10/12
电气控制与PLC
20
组合流程虚拟状态的设置
有一些分支、汇合状态的状态转移图,连续地直接从汇合线转移到下一个分支线,没 有中间状态。这样的组合流程既不能直接编程,又不能采用变换后编程。 这时需要在汇合线到分支线之间插入一个状态,以改变直接从汇合线到下一个分支线 的状态转移,但在实际工艺中这个状态并不存在,所以只是虚设,这种状态称为虚拟状 态。加入虚拟状态后,状态转移图就可以进行编程了。
2018/10/12
电气控制与PLC
11
大、小球分类选择控制状态转移图
两个分支:若吸住的是小球,则X002为 ON,执行左侧流程;若为大球,X002为 OFF,执行右侧流程。
初始状态由M8002初始脉冲驱动,在步进 梯形图外编制机械臂处于原点时的指示梯形 图程序(Y007指示)。 步进梯形图程序中,增加了机械臂上电磁 铁下降至接近开关PS0位置时的控制功能, 与限位开关LS2共同作用(状态转移图中未 表示)。
2018/10/12
电气控制与PLC
12
大、小球分类选择控制步进梯形图
2018/10/12
电气控制与PLC
13
大、小球分类选择控制步进梯形图
2018/10/12
电气控制与PLC
14
大、小球分类选择控制步进梯形指令
2018/10/12
电气控制与PLC