《机械设计基础》第五版按给定的行程速比系数K设计曲柄滑块机构
行程速比系数最大的偏置曲柄滑块机构代数法设计

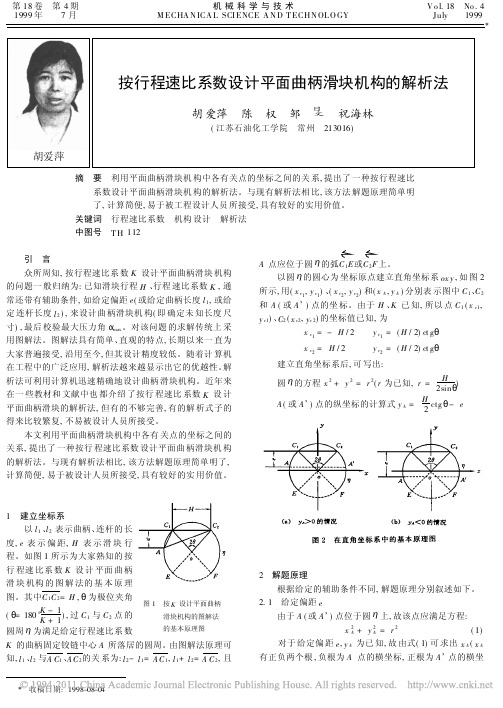
行程速比系数最大的偏置曲柄滑块机构代数法设计王洪欣【期刊名称】《《江苏建筑职业技术学院学报》》【年(卷),期】2019(019)002【总页数】5页(P30-34)【关键词】机械学; 偏置曲柄滑块机构; 代数方法; 行程速比系数最大; 函数的极值【作者】王洪欣【作者单位】中国矿业大学徐海学院江苏徐州221116【正文语种】中文【中图分类】TH112.1平面四杆连杆机构因结构简单且又能完成许多任务,所以在生产上获得了广泛的应用并得到深入的研究,其中对曲柄摇杆机构[1-7]与曲柄滑块机构[8-19]研究得最多,研究的内容主要集中在满足许用传动角条件与最小传动角的最大化[4-9,12-18]上,研究的方法多为代数方法,只有文献[19]以微分方法确定曲柄滑块机构的最大行程速比系数,该方法相对复杂难以计算.最大行程速比系数是机械设计追求的一项重要指标,其反映的是空程时间最短以提高机器的工作效率.本文将函数的极值理论与代数方法相结合,研究了行程速比系数最大化的曲柄滑块机构代数设计方法,获得的设计公式相对简单且易于计算,通过一个实例展示了设计过程与结果.1 偏置曲柄滑块机构的代数设计方程偏置曲柄滑块机构如图1所示,设曲柄1的杆长为a,连杆2的杆长为b,滑块3的行程为H,偏置量为e,极位夹角为θ,行程速比系数K 与θ的关系为图1 偏置曲柄滑块机构的几何关系Fig.1 Geometrical relationship of offset crank slider mechanism当该机构到达最小传动角γmin位置时,如图2所示,最小传动角γmin的函数关系为图2 偏置曲柄滑块机构的最小传动角Fig.2 Minimum transmission angle of offset crank slider mechanism在图2中,对ΔAC 1C 2 应用余弦定理得H 2=(b+a)2+(b-a)2-2(b+a)(b-a)cosθ,于是得连杆2的杆长b的函数关系为在图2中,δ为滑块3到达左极限位置时连杆2与x 1轴的夹角,δ的函数关系为对ΔAC 1C 2应用正弦定理得将式(4)代入式(5)得连杆2杆长b的表达式为消去式(3)与式(6)中的b为将tan(θ/2)=(1-cosθ)/sinθ代入上式得偏置量e 为联立式(2)与式(6)消去b将sinθ转化为tan(θ/2)的函数得将式(7)代入式(8),消去e得令x=a/H,y=tan(θ/2),式(9)转化为式(10)是y 关于x 的隐函数,行程速比系数K的最大值K max对应θ达到最大值θmax,即y 达到最大值,为此,对式(10)取y 关于x 的一阶导数并令其值等于零,于是得x 使y 取得极大值的条件,即θ取得极大值,y 关于x 的一阶导数为消去式(10)、式(11)中的最小传动角γmin得为由式(12)得x 为式(14)的x=y/2为增根舍去,将式(15)代入式(10)的左边得将式(15)代入式(10)的右边得为此,得γmin与y 的函数关系为将γmin取为许用值[γ]、由式(16)得y 的六次代数方程为上式的左边为上式的右边为左边等于右边得令z=y 2,引入系数a 1、a 2、a 3,于是,式(17)表达为关于z的三次代数标准方程为令,q=a 3-a 1a 2/3,式(18)表达为无U 2项的三次代数方程为令,式(18)的可解三次代数方程为式(19)的一个实数解为于是,得z、y、θ分别为x 由式(15)求解,曲柄1的杆长a为偏置量e由式(7)求解;连杆2的杆长b 由式(6)求解.2 偏置曲柄滑块机构的运动方程如图1所示的偏置曲柄滑块机构的位移方程及其解S 3与ψ 分别为令滑块3 的速度V 31=d S 3/d t、加速度a 31=d2S 3/d t 2、加速度的一次变化率q 31=d3S 3/d t 3.3 偏置曲柄滑块机构的设计实例在砖坯生产自动线上,一组纵向位移的砖坯要转为横向位移,以便机械手抓取后转位加以码垛,要求行程速比系数最大以减少空程时间,行程H=1 800 mm,最小传动角γmin等于许用传动角[γ]=40°,试按行程速比系数最大设计该机构.由以上公式得a 1、a 2、a 3、p、q、U、z、y、θ、x、a、e与b 分别为设计出的曲柄滑块机构如图3所示,当曲柄1的ω1=1 rad/s时,经运动分析与VB 编程计算后,得滑块3位移为S 3(mm)、速度V 31(mm/s)、加速度a 31(mm/s2)、加速度的一次变换率为q 31(mm/s3)关于曲柄1 转角φ 的曲线关系如图4 所示.应用表明,生产率比之前按最小传动角γmin=40°、凭经验选择偏置量e=550 mm 的设计提高了8%.图3 设计出的偏置曲柄滑块机构Fig.3 Offset crank slider mechanism designed corresponding the over conditions图4 偏置曲柄滑块机构的传动特征Fig.4 Transmission properties of the offset crank slider mechanism4 结论通过建立机构的最小传动角几何关系与极限位置的几何关系,结合隐函数取得极大值的必要条件,建立了许用传动角条件下的行程速比系数达到最大的六次代数方程,通过两次变量代换降为三次代数可解方程,从而获得了偏置曲柄滑块机构具有最大行程速比系数的代数设计方程组.设计实例表明了该方法相对简单,既无理论上的设计误差,又无须迭代计算.【相关文献】[1] 李明,蒋天弟.基于传力条件的具有急回特征的四杆机构设计[J].机械科学与技术,2001,20(4):545-546.[2] 杨世明,金国光.平面连杆机构平均传动角及其应用研究[J].机械,2008,35(3):1-3.[3] 车林仙.按许用传动角综合曲柄摇杆机构的非迭代法[J].机械设计,2010,27(1):53-56.[4] 楼云江,邓雷.基于最佳平均传动角的曲柄摇杆机构设计[J].机械设计,2011,28(8):34-37.[5] 程友联,吴晓红.按最佳传动角设计偏置曲柄摇杆机构的闭式解[J].机械设计与研究,2009(6):28-30.[6] 苏有良.按最小传动角最大的曲柄摇杆机构优化设计[J].机械设计,2014,31(6):29-33.[7] 王洪欣,张雪梅,陈海英,等.按许用压力角设计曲柄摇杆机构的非迭代方法[J].机械设计,1998,15(1):4-6.[8] 苏有良.根据许用压力角、k、H 设计曲柄滑块机构的解析法[J].机械设计,2008,25(9):71-73.[9] 李洁,车林仙,何兵.按传动角优化曲柄滑块机构的约束粒子群算法[J].机械设计,2012,29(1):65-68.[10] 韩继光,王贵成.按行程速比系数设计曲柄滑块机构的解析法[J].机械设计,2004,21(12):55-56.[11] 高朝祥,王充.基于粒子群算法的曲柄滑块机构优化设计[J].包装机械,2011,27(4):101-103.[12] 李延平,常勇.具有许用传动角[γ]的平面曲柄滑块机构设计[J].机械科学与技术,2002,21(2):243-244.[13] 常勇.具有许用传动角和最显著急回特性的平面曲柄滑块机构设计[J].集美大学学报(自然科学版),2002,7(1):23-25.[14] 常勇.具有最佳传动角的平面曲柄滑块机构的解析解法[J].机械科学与技术,2002,21(6):957-958.[15] 娄建国.根据工作行程最优传动角设计曲柄滑块机构[J].机械与电子,2004,23(1):26-28.[16] 年四甜.按最佳传动角设计偏置曲柄滑块机构[J].机械设计,2008,25(12):48-50.[17] 金熙哲,王玉新,郭为盅.传动角最优的曲柄滑块机构多变量优化设计[J].上海交通大学学报,2007,41(4):561-564.[18] 朱佳金.基于Creo2.2偏置曲柄滑块机构优化设计[J].机械设计,2015,32(11):36-39.[19] 孟兆明,唐仁刚,赵海霞,等.采用微分法确定曲柄滑块机构最大行程速比系数[J].机械设计,2007,24(9):42-43.。
管理学机械设计基础第五版杨可桢版第一章平面机构的自由度和速度分析
两构件组成的运动副,不外乎通过点、线或面 的接触来实现。按照接触特性,通常把运动副分为 高副和低副。
1.低副:凡两构件以面接触构成的运动副称为低副, 平面机构中的低副有转动副和移动副两种。 (1)转动副:组成运动副的两构件只能在一个平面 内相对转动,这种运动副称为转动副,或称铰链。
讲授方法:
多媒体课件。
§1-1 运动副及其分类
1.1 自由度
y
O
x
如图,处于xoy坐标系中的一个作平面运动的自由 自由构件S具有三个独立的运动,即沿x轴、y轴方向的 移动和绕A点的转动。这种相对于参考系构件所具有的 独立运动称为构件的自由度。
一个作平面运动的自由构件有三个自由度。
1.2 运动副及其分类
下面通过具体的例子说明机构运动简图的绘 制方法。
四、绘制机构运动简图的步骤
机构运动简图必须与原机构具有完全相同的运 动特性,忽略对运动没有影响的构件的外形和运动 副具体构造。只有这样我们才可以根据运动简图对 机构进行运动分析和受力分析。为了达到这一要求, 绘制运动简图要遵循以下步骤:
⑴.根据机构的实际结构和运动情况,找出机构的原动件(即作独立运 动的构件)及工作执行构件(即输出运动的构件); ⑵.确定机构的传动部分,即确定构件数、运动副、类型和位置; ⑶.确定机架,并选定多数机构的运动平面作为绘制简图的投影面; ⑷.选择合适的比例尺,用构件和运动副的符号正确绘制出运动简图。
教学目标:
1.了解机构的组成,搞清运动副、运动链、约束和 自由度、速度瞬心的概念; 2.能绘制常用平面机构的运动简图; 3.能计算平面机构的自由度; 4.平面机构具有确定运动的条件; 5. 应用瞬心法进行机构的速度分析。
教学重点和难点 :
机械设计基础复习题及答案

机械设计基础复习题及答案⼀、选择题1、平⾯四杆机构中,是否存在死点,取决于B是否于连杆共线。
A、主动件B、从动件C、机架D、摇杆2、当四杆机构处于死点位置时,机构的压⼒⾓为 AA 、90°B、0 °C、180 ° D 、与构件有关3、铰链四杆机构的杆长为a=60,b=80,c=100,d=90。
若以杆a为机架,则此四杆机构 A 。
A、为双曲柄机构B、为曲柄摇杆机构C、为双摇杆机构D、为曲柄滑块机构4、具有急回作⽤的曲柄摇杆机构的⾏程速⽐系数K为 AA、⼤于1B、⼩于1 C 、等于1 D、等于05、采⽤型铣法加⼯斜齿轮时,应根据 B 选择成型铣⼑。
A、轴⾯模数B、法⾯模数C、端⾯模数D、⼤端模数6、⼀对渐开线斜齿圆柱齿轮在啮合传动过程中,⼀对齿廓上的接触线长度是C变化的。
A、由⼩逐渐到⼤B、由⼤逐渐到⼩C、由⼩逐渐到⼤再到⼩D、始终保持定值7、渐开线的弯曲程度取决于B的⼤⼩。
A、分度圆B、基圆C、齿顶圆A、⼀定相等B、⼀定不相等C、与齿轮传动⽐有关D、与基圆半径有关9、⼀对相互啮合的渐开线减速齿轮传动,⼩齿轮齿⾯硬度>350HBS,⼤齿轮齿⾯硬度<350HBS,在传递动⼒时__ B _____。
A、⼩齿轮齿⾯最⼤接触应⼒较⼤B、两齿轮齿⾯最⼤接触应⼒相等C、⼤齿轮齿⾯最⼤接触应⼒较⼤D、接触应⼒与齿数、材料有关,不⼀定哪个⼤10、⼀对渐开线直齿圆柱齿轮正确啮合的条件是B。
A、齿轮的模数和齿距分别相等B、两齿轮的模数和压⼒⾓分别相等C、两齿轮的基圆相等D、两齿轮的齿厚和齿槽宽分别相等11、对于开式齿轮传动,在⼯程设计中,⼀般(D )A、按接触强度设计齿轮尺⼨,在验算弯曲强度B、只需按接触强度设计C、按弯曲强度设计齿轮尺⼨,在验算接触强度D、只需按弯曲强度设计12、渐开线直齿圆柱标准齿轮是指___ C _ _ 的齿轮。
A 、分度圆上模数和压⼒⾓;B、节圆等于分度圆;C、分度圆上齿厚等于齿槽宽,⽽且模数、压⼒⾓以及齿顶⾼系数、顶隙系数均为标准值。
平面四杆机构设计

1.曲柄摇杆机构 2.曲柄滑块机构 3.导杆机构
1.曲柄摇杆机构
已知条件: 已知条件:行程速比系数K、摇杆的长度 l CD和摇杆的摆角Ψ
K −1 (1)计算极位夹角 K +1 (m/mm), (2)取适当的比例尺μl = l CD/CD(m/mm),并由 l CD 和Ψ 作出两极限位置C1D、C2D; 点作∠ 90° (3)过C2点作∠C1C2N=90°-θ的射线C2N,然后再过C1点作C2C1的垂线C1N 交C2N于P; 为直径作圆, 点必在此圆上; (4)以C2P为直径作圆,圆心为O,则A点必在此圆上; (5)由其他已知条件在圆周上取点A,连AC1、AC2;
例
例
2.给定连杆三个位置设计四杆机构
为连杆所要到达的三个位置,要求设计该四杆机构。 已知B1C1、B2C2、B3C3为连杆所要到达的三个位置,要求设计该四杆机构。 根据已知条件, 根据已知条件,活动铰链B、C 两点的相对位置已定,所以, 两点的相对位置已定,所以,设计 此四杆机构的实质仍然是要求出两 的位置。 固定铰链点A、D的位置。由于连杆 上的铰链中心B和C的轨迹分别为一 圆弧而同时通过三点要求B1、B2、B3 的圆分别只有一个。 和C1、C2、C3的圆分别只有一个。所 以,连架杆的固定铰链中心A和D只 有一个确定的解。 有一个确定的解 。 即 B1B2 和 B2B3 的垂直平分线 b12 和 b23 的交点为 A 以及 C1C2 和
1 EC2 lAB = µ l ( AC2 − AC1 ) = µ l 2 2 l = 1 µ ( AC + AC ) = µ ( AC − EC2 ) 2 1 l 2 BC 2 l 2 (7) 讨论:由于A点可在△C1PC2的外接圆周的弧C1PC2上任意选取,所以,若仅按行 讨论: 点可在△ 上任意选取, 所以, 来设计,可以得到无穷多组解。因此,在未给出其它附加条件的情况下, 程速比系数K来设计,可以得到无穷多组解。因此,在未给出其它附加条件的情况下, 点的位置。 如欲获得良好的传动质量, 如欲获得良好的传动质量,可按照传动角最优或其它辅助条件来确定A点的位置。
《机械设计基础》第五版第2章平面连杆机构

t1 (180 ) /
V1 C1C2 t1
C1C2 /(180 )
当曲柄以ω继续转过 φ 2=180-θ 时,摇杆从C1D, 置摆到C2D,所花时间为t2 , 平均速度为V2 ,那么有:
t2 (180 ) /
V2 C1C2 t2
C1C2 /(180 )
2 22
C 3
A
4
定块机构
机械设计基础-第2章平面连杆机构
三、含两个移动副的四杆机构
了解
正弦机构
正弦机构
双转块机构 (十字滑块机构)
双滑块机构
正切机构
机械设计基础-第2章平面连杆机构
缝纫机针杆运 动机构
十字沟槽联轴节
正切机构
椭圆仪
十字沟槽联轴节
机械设计基础-第2章平面连杆机构
四、具有偏心轮的四杆机构
例题
机械设计基础-第2章平面连杆机构
二.急回特性 平面四杆机构的极位 主动件:曲柄 从动件:摇杆
极位:从动件的两 个极限位置
极位夹角θ:从动件处于两个极 位时,曲柄两位置之间的夹角 最大摆角ψ:摇杆往复摆过的 最大角度
机械设计基础-第2章平面连杆机构
急回特性分析
当曲柄以ω逆时针转过 φ1=180°+θ时,摇杆从C2D 位 置 摆 到 C1D , 所 花 时 间 为 t1 , 平均速度为V1,那么有:
特例2 反平行双曲柄机构:对边平行但不相等
应用实例:车门启闭机构
反向双曲柄机构
车门启闭机构
机械设计基础-第2章平面连杆机构
3、双摇杆机构
结构特点:二连架杆均为摇杆 运动变换:摆动摆动
工程应用实例:
港口起重机 飞机起落架 车辆的前轮转向机构 造型机翻箱机构 风扇摇头机构
按行程速比系数设计平面曲柄滑块机构的解析法
rit hm f or t h e Pos t-b uckl ing A n al ysis of Shell St ruct ures . Com -
pu ter M et hods in A pplied M ech an ics an d Eng ineering, 1990, 78: 141~163 4 Brow ne A , Fuchs H, et al . Side-impact T es t ing of R ace Car S an dwi ch Panels . A ut omot ive Engin eering, 1997( 3) : 99~104 5 S t illm an D W , Hallqui st J O . LS-IN G RID : A pre-process or and t hree-dimens ion al M esh G enerat or f or t he Programs LS D Y N A 3D, LS -N IK E 3D an d T O PA Z3D . Liverm or e: Liver -
之差为常数。若取 C1 与 C2 点为双曲线的两定点( 焦点) , 则 点 A ( 或 A ) 恰好为双曲线 上的一个点, 作双 曲线 !如图 3 所示。
图 4 给定 l 2 时得到的椭圆 !与圆 的关系图
图 3 给定 l1 时得到的双曲线 !与圆 的关系图
图 3 中双曲线 !的方程为
机械设计基础-第五版-课后习题答案-详细解答

前言机械设计基础课程是高等工科学校近机类、非机类专业开设的一门技术基础课。
杨可桢、程光蕴主编的《机械设计基础》, 因其内容精炼、深度适中、重点突出、知识面宽而被众多高等学校作为主要教材在教学中采用。
本书是根据原国家教委颁布的“高等工业学校机械设计基础课程基本要求”, 汇集了编者多年来的教学经验, 在深刻理解机械设计基础课程内容的基础上编写而成的, 是杨可桢、程光蕴主编《机械设计基础》的配套辅导书, 章节顺序和内容体系与教材完全一致, 并涵盖了国内同类教材的重点内容。
本书特点:1 .明确每章的教学基本要求和重点教学内容。
重点介绍基本概念、基本理论、基本分析方法和设计方法。
2 . 建立明晰的知识结构框架。
3 . 考点及经典题型精解。
介绍考点的具体内容,并详尽剖析, 总结解题规律、解题思路、解题技巧。
4 . 详细的课后习题解答。
5 . 自测试题及答案符合考点精神, 便于学习总结和自我检验。
书后附有模拟试题五套。
参加本书编写工作的有: 西安电子科技大学李团结( 第1 , 14章)、西安石油大学秦彦斌(第3 章) 、西安石油大学陆品( 第13章)、西安建筑科技大学史丽晨(第2 , 5 , 7 , 8 , 12 章)、西安建筑科技大学郭瑞峰(第4 , 6 , 9 , 10 , 11 , 15 , 16 , 17 , 18 章及模拟试题)。
全书由郭瑞峰、史丽晨主编。
本书可作为近机类、非机类大学生学习《机械设计基础》课程的参考书, 也可供电大、职大、函大、夜大等相关专业的学生学习使用, 也可作为考研辅导书, 还可供有关教师及工程技术人员参考。
由于编者水平有限, 书中难免有谬误和不妥之处, 敬请读者批评指正。
编者2005 年8 月于西安2 机械设计基础导教·导学·导考目录第1 章平面机构的自由度和速度分析⋯⋯⋯⋯⋯⋯11 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1 1 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯6 1 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯61 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯111 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯16第2 章平面连杆机构⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯202 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯202 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯262 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯272 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯322 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯42第3 章凸轮机构⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯503 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯503 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯573 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯583 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯673 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯79 第4 章齿轮机构⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯844 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯844 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯934 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯95 4 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1014 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯108第5 章轮系⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1115 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1115 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1145 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1155 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1185 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯131第6 章间歇运动机构⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1376 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1376 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1406 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1406 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1426 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯144第7 章机械运转速度波动的调节⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯146 7 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1467 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1497 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1497 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯153Ⅱ机械设计基础导教·导学·导考7 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯161第8 章回转件的平衡⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1658 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1658 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1688 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯168 8 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1728 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯183 第9 章机械零件设计概论⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯187 9 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1879 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1949 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯195 9 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1969 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯206 第10 章联接⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯20910 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯20910 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯21710 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯218 10 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯22410 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯240 第11 章齿轮传动⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯24311 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯24311 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯25411 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯25511 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯258目录Ⅲ11 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯274第12 章蜗杆传动⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯27712 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯27712 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯28112 .3 考点及常见题型精解⋯ .⋯ .⋯ .⋯ .⋯ .⋯ .⋯282 12 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯28612 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯293第13 章带传动和链传动⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯29713 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯29713 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯30613 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯30713 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯31613 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯324第14 章轴⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯32914 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯32914 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯33314 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯33414 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯33814 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯347第15 章滑动轴承⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯35015 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯35015 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯35615 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯35715 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯359Ⅳ机械设计基础导教·导学·导考15 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯361第16 章滚动轴承⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯36316 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯36316 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯37216 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯37316 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯37916 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯386第17 章联轴器、离合器和制动器⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯390 17 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯39017 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯39217 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯39317 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯39617 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯400第18 章弹簧⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯40318 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯40318 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯40818 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯40918 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯41118 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯418附录模拟试题及参考解答⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯420附录A 模拟试题⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯420附录B 模拟试题参考解答⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯439参考文献⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯449目录Ⅴ第1 章平面机构的自由度和速度分析1. 1 重点内容提要1 .1 .1 教学基本要求( 1) 掌握运动副的概念及其分类。
机械设计基础-期中考试习题课
轨迹都是圆弧。
增加的约束不起作用,应去掉构件4。
出现虚约束的场合:
1.两构件联接前后,联接点的轨迹重合,
如平行四边形机构,火车轮
椭圆仪等。
2.两构件构成多个移动副,且导路 平行。
3.两构件构成多个转动副,且同 轴。
4. 运 动 时 , 两 构 件 上 的 两 点距离始终不变。
E
F
5.对运动不起作用的对称 部分。如多个行星轮。
,A C2=l2- l1 ⑥以A为圆心,A C2为半径作弧交于E,得:
l1 =EC1/ 2 l2 = A C1-EC1/ 2
A
C2
E
θ
φ 设计:潘存云
A2(A1) VA2A1
2
P21
B2(B1) VB2B1
1
相对瞬心-重合点绝对速度不为零。 Vp2=Vp1≠0 绝对瞬心-重合点绝对速度为零。 Vp2=Vp1=0
特点: ①该点涉及两个构件。
②绝对速度相同,相对速度为零。
2)瞬③心相数对目回转中心。 若机构中有n个构件,则
P13
1 23
∵每两个构件就有一个瞬心
绘制机构运动简图的步骤与方法
1、分析机构的组成及运动情况,确定机构中的机架、原动部分、传动部分和执行 部分,以确定构件和运动副的数目。
2、循着运动传递的路线,逐一分析每两个构件间相对运动的性质,确定运动副的 类型和数目;还应确定与机构运动特性相关的运动要素:运动副间的相对位置。 如转动副中心的位置和移动副导路的方位;高副的廓线形状,包括其曲率中心 和曲率半径等。
AB
sin 45 0 sin BCA
sin BCA 2 5
cos BCA 23 5
p14
4