有限元及程序设计作业1
弹性力学与有限元分析第二章-平面桁架有限元分析及程序设计

x
由单元①的刚度方程:
Fj
①
k
① ji
i
①
k
① jj
j
①
k
① ji
2
k
① jj
1
由单元③的刚度方程:
Fj
③
k
③ ji
i
③
k
③ jj
j
③
k
③ ji
3
k
③ jj
1
§2.3 结点平衡与整体刚度矩阵的集成
代入结点1的平衡条件:
k
l
xi
)
(dx j
dxi
)
(
yj
l
yi )
(dy j
dyi )
(dx j dxi ) (dy j dyi )
cos sin
由于杆件的变形产生位移:
ui dxi vi dyi
u j dxj v j dy j
因此,杆件应变为:
dl l
l
(ui
uj)
l
(vi
vj)
杆件轴力为:
(2k1 k2 )v4 P
结构的整体刚度系数
v4
P 2k1
k2
12 3
l2 l1 l1
4 P
N1
N1y
cos
k1v4
cos
k1P
(2k1 k2 ) cos
N2
k2v4
k2P 2k1 k2
位移法求解超静定结构。
§2.1 平面桁架单元的离散
结构的离散化:尽量将结构离散成数量最少的等截面直 杆单元
kki③ ③jii
ki③j
k
③ jj
3 3 3 3
§2.3 结点平衡与整体刚度矩阵的集成
(完整版)有限元大作业matlab---课程设计例子
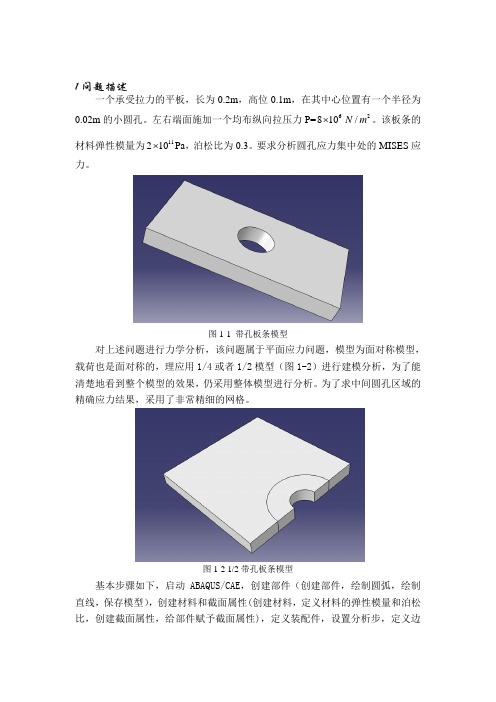
有限元大作业程序设计学校:天津大学院系:建筑工程与力学学院专业:01级工程力学姓名:刘秀学号:\\\\\\\\\\\指导老师:连续体平面问题的有限元程序分析[题目]:如图所示的正方形薄板四周受均匀载荷的作用,该结构在边界上受正向分布压力,m kNp 1=,同时在沿对角线y 轴上受一对集中压力,载荷为2KN ,若取板厚1=t ,泊松比0=v 。
[分析过程]:由于连续平板的对称性,只需要取其在第一象限的四分之一部分参加分析,然后人为作出一些辅助线将平板“分割”成若干部分,再为每个部分选择分析单元。
采用将此模型化分为4个全等的直角三角型单元。
利用其对称性,四分之一部分的边界约束,载荷可等效如图所示。
[程序原理及实现]:用FORTRAN程序的实现。
由节点信息文件NODE.IN和单元信息文件ELEMENT.IN,经过计算分析后输出一个一般性的文件DATA.OUT。
模型基本信息由文件为BASIC.IN生成。
该程序的特点如下:问题类型:可用于计算弹性力学平面问题和平面应变问题单元类型:采用常应变三角形单元位移模式:用用线性位移模式载荷类型:节点载荷,非节点载荷应先换算为等效节点载荷材料性质:弹性体由单一的均匀材料组成约束方式:为“0”位移固定约束,为保证无刚体位移,弹性体至少应有对三个自由度的独立约束方程求解:针对半带宽刚度方程的Gauss消元法输入文件:由手工生成节点信息文件NODE.IN,和单元信息文件ELEMENT.IN结果文件:输出一般的结果文件DATA.OUT程序的原理如框图:(1)主要变量:ID:问题类型码,ID=1时为平面应力问题,ID=2时为平面应变问题N_NODE:节点个数N_LOAD:节点载荷个数N_DOF:自由度,N_DOF=N_NODE*2(平面问题)N_ELE:单元个数N_BAND:矩阵半带宽N_BC:有约束的节点个数PE:弹性模量PR:泊松比PT:厚度LJK_ELE(I,3):单元节点编号数组,LJK_ELE(I,1),LJK_ELE(I,2),LJK_ELE(I,3)分别放单元I的三个节点的整体编号X(N_NODE), Y(N_NODE):节点坐标数组,X(I),Y(I)分别存放节点I的x,y 坐标值P_LJK(N_BC,3):节点载荷数组,P_LJK(I,1)表示第I个作用有节点载荷的节点的编号,P_LJK(I,2),P_LJK(I,3)分别为该节点沿x,y方向的节点载荷数值AK(N_DOF,N_BAND):整体刚度矩阵AKE(6,6):单元刚度矩阵BB(3,6):位移……应变转换矩阵(三节点单元的几何矩阵)DD(3,3):弹性矩阵SS(3,6);应力矩阵RESULT_N(N_NOF):节点载荷数组,存放节点载荷向量,解方程后该矩阵存放节点位移DISP_E(6)::单元的节点位移向量STS_ELE(N_ELE,3):单元的应力分量STS_ND(N_NODE,3):节点的应力分量(2)子程序说明:READ_IN:读入数据BAND_K:形成半带宽的整体刚度矩阵FORM_KE:计算单元刚度矩阵FORM_P:计算节点载荷CAL_AREA:计算单元面积DO_BC:处理边界条件CLA_DD:计算单元弹性矩阵SOLVE:计算节点位移CLA_BB:计算单元位移……应变关系矩阵CAL_STS:计算单元和节点应力(3)文件管理:源程序文件:chengxu.for程序需读入的数据文件:BASIC.IN,NODE.IN,ELEMENT.IN(需要手工生成)程序输出的数据文件:DATA.OUT(4)数据文件格式:需读入的模型基本信息文件BASIC.IN的格式如下表需读入的节点信息文件NODE.IN的格式如下表需读入的单元信息文件ELEMENT.IN的格式如下表输出结果文件DATA.OUT格式如下表[算例原始数据和程序分析]:(1)模型基本信息文件BASIC.IN的数据为1,4,6,5,31.,0.,1.1,1,0,2,1,0,4,1,1,5,0,1,6,0,11,-0.5,-1.5,3.,-1.,-1,6,-0.5,-0.5(2)手工准备的节点信息文件NODE.IN的数据为1 0.0 2.02 0.0 1.03 1.0 1.04 0. 0.5 1.0 0.6 2.0 0.(3)手工准备的单元信息文件ELEMENT.IN的数据为1 2 3 3 0 0 0 0 1 1 1 1 0 12 4 5 5 0 0 0 0 1 1 1 1 0 25 3 2 2 0 0 0 0 1 1 1 1 0 33 5 6 6 0 0 0 0 1 1 1 1 04 (4)源程序文件chengxu.for为:PROGRAM FEM2DDIMENSION IJK_ELE(500,3),X(500),Y(500),IJK_U(50,3),P_IJK(50,3),&RESULT_N(500),AK(500,100)D IMENSION STS_ELE(500,3),STS_ND(500,3)OPEN(4,FILE='BASIC.IN')OPEN(5,FILE='NODE.IN')OPEN(6,FILE='ELEMENT.IN')OPEN(8,FILE='DATA.OUT')OPEN(9,FILE='FOR_POST.DAT')READ(4,*)ID,N_ELE,N_NODE,N_BC,N_LOADIF(ID.EQ.1)WRITE(8,20)IF(ID.EQ.2)WRITE(8,25)20 FORMAT(/5X,'=========PLANE STRESS PROBLEM========')25 FORMAT(/5X,'=========PLANE STRAIN PROBLEM========')CALL READ_IN(ID,N_ELE,N_NODE,N_BC,N_BAND,N_LOAD,PE,PR,PT, & IJK_ELE,X,Y,IJK_U,P_IJK)CALL BAND_K(N_DOF,N_BAND,N_ELE,IE,N_NODE,& IJK_ELE,X,Y,PE,PR,PT,AK)CALL FORM_P(N_ELE,N_NODE,N_LOAD,N_DOF,IJK_ELE,X,Y,P_IJK, & RESULT_N)CALL DO_BC(N_BC,N_BAND,N_DOF,IJK_U,AK,RESULT_N)CALL SOLVE(N_NODE,N_DOF,N_BAND,AK,RESULT_N)CALL CAL_STS(N_ELE,N_NODE,N_DOF,PE,PR,IJK_ELE,X,Y,RESULT_N, & STS_ELE,STS_ND)c to putout a data fileWRITE(9,70)REAL(N_NODE),REAL(N_ELE)70 FORMAT(2f9.4)WRITE(9,71)(X(I),Y(I),RESULT_N(2*I-1),RESULT_N(2*I),& STS_ND(I,1),STS_ND(I,2),STS_ND(I,3),I=1,N_NODE)71 FORMA T(7F9.4)WRITE(9,72)(REAL(IJK_ELE(I,1)),REAL(IJK_ELE(I,2)),&REAL(IJK_ELE(I,3)),REAL(IJK_ELE(I,3)),&STS_ELE(I,1),STS_ELE(I,2),STS_ELE(I,3),I=1, N_ELE)72 FORMAT(7f9.4)cCLOSE(4)CLOSE(5)CLOSE(6)CLOSE(8)CLOSE(9)E NDcc to get the original data in order to model the problemSUBROUTINE READ_IN(ID,N_ELE,N_NODE,N_BC,N_BAND,N_LOAD,PE,PR, &PT,IJK_ELE,X,Y,IJK_U,P_IJK)DIMENSION IJK_ELE(500,3),X(N_NODE),Y(N_NODE),IJK_U(N_BC,3), & P_IJK(N_LOAD,3),NE_ANSYS(N_ELE,14)REAL ND_ANSYS(N_NODE,3)READ(4,*)PE,PR,PTREAD(4,*)((IJK_U(I,J),J=1,3),I=1,N_BC)READ(4,*)((P_IJK(I,J),J=1,3),I=1,N_LOAD)READ(5,*)((ND_ANSYS(I,J),J=1,3),I=1,N_NODE)READ(6,*)((NE_ANSYS(I,J),J=1,14),I=1,N_ELE)DO 10 I=1,N_NODEX(I)=ND_ANSYS(I,2)Y(I)=ND_ANSYS(I,3)10 CONTINUEDO 11 I=1,N_ELEDO 11 J=1,3IJK_ELE(I,J)=NE_ANSYS(I,J)11 CONTINUEN_BAND=0DO 20 IE=1,N_ELEDO 20 I=1,3DO 20 J=1,3IW=IABS(IJK_ELE(IE,I)-IJK_ELE(IE,J))IF(N_BAND.LT.IW)N_BAND=IW20 CONTINUEN_BAND=(N_BAND+1)*2IF(ID.EQ.1) THENELSEPE=PE/(1.0-PR*PR)PR=PR/(1.0-PR)END IFR ETURNENDcC to form the stiffness matrix of elementSUBROUTINE FORM_KE(IE,N_NODE,N_ELE,IJK_ELE,X,Y,PE,PR,PT,AKE) DIMENSION IJK_ELE(500,3),X(N_NODE),Y(N_NODE),BB(3,6),DD(3,3), & AKE(6,6), SS(6,6)CALL CAL_DD(PE,PR,DD)CALL CAL_BB(IE,N_NODE,N_ELE,IJK_ELE,X,Y,AE,BB)DO 10 I=1,3DO 10 J=1,6SS(I,J)=0.0DO 10 K=1,310 SS(I,J)=SS(I,J)+DD(I,K)*BB(K,J)DO 20 I=1,6DO 20 J=1,6AKE(I,J)=0.0DO 20 K=1,320 AKE(I,J)=AKE(I,J)+SS(K,I)*BB(K,J)*AE*PTRETURNENDcc to form banded global stiffness matrixSUBROUTINE BAND_K(N_DOF,N_BAND,N_ELE,IE,N_NODE,IJK_ELE,X,Y,PE, & PR,PT,AK)DIMENSIONIJK_ELE(500,3),X(N_NODE),Y(N_NODE),AKE(6,6),AK(500,100)N_DOF=2*N_NODEDO 40 I=1,N_DOFDO 40 J=1,N_BAND40 AK(I,J)=0DO 50 IE=1,N_ELECALL FORM_KE(IE,N_NODE,N_ELE,IJK_ELE,X,Y,PE,PR,PT,AKE)DO 50 I=1,3DO 50 II=1,2IH=2*(I-1)+IIIDH=2*(IJK_ELE(IE,I)-1)+IIDO 50 J=1,3DO 50 JJ=1,2IL=2*(J-1)+JJIZL=2*(IJK_ELE(IE,J)-1)+JJIDL=IZL-IDH+1IF(IDL.LE.0) THENELSEAK(IDH,IDL)=AK(IDH,IDL)+AKE(IH,IL)END IF50 CONTINUERETURNENDcc to calculate the area of elementSUBROUTINE CAL_AREA(IE,N_NODE,IJK_ELE,X,Y,AE)DIMENSION IJK_ELE(500,3),X(N_NODE),Y(N_NODE)I=IJK_ELE(IE,1)J=IJK_ELE(IE,2)K=IJK_ELE(IE,3)XIJ=X(J)-X(I)YIJ=Y(J)-Y(I)XIK=X(K)-X(I)YIK=Y(K)-Y(I)AE=(XIJ*YIK-XIK*YIJ)/2.0RETURNENDcc to calculate the elastic matrix of elementSUBROUTINE CAL_DD(PE,PR,DD)DIMENSION DD(3,3)DO 10 I=1,3DO 10 J=1,310 DD(I,J)=0.0DD(1,1)=PE/(1.0-PR*PR)DD(1,2)=PE*PR/(1.0-PR*PR)DD(2,1)=DD(1,2)DD(2,2)=DD(1,1)DD(3,3)=PE/((1.0+PR)*2.0)RETURNENDcc to calculate the strain-displacement matrix of elementSUBROUTINE CAL_BB(IE,N_NODE,N_ELE,IJK_ELE,X,Y,AE,BB) DIMENSION IJK_ELE(500,3),X(N_NODE),Y(N_NODE),BB(3,6)I=IJK_ELE(IE,1)J=IJK_ELE(IE,2)K=IJK_ELE(IE,3)DO 10 II=1,3DO 10 JJ=1,310 BB(II,JJ)=0.0BB(1,1)=Y(J)-Y(K)BB(1,3)=Y(K)-Y(I)BB(1,5)=Y(I)-Y(J)BB(2,2)=X(K)-X(J)BB(2,4)=X(I)-X(K)BB(2,6)=X(J)-X(I)BB(3,1)=BB(2,2)BB(3,2)=BB(1,1)BB(3,3)=BB(2,4)BB(3,4)=BB(1,3)BB(3,5)=BB(2,6)BB(3,6)=BB(1,5)CALL CAL_AREA(IE,N_NODE,IJK_ELE,X,Y,AE)DO 20 I1=1,3DO 20 J1=1,620 BB(I1,J1)=BB(I1,J1)/(2.0*AE)RETURNENDcc to form the global load matrixSUBROUTINE FORM_P(N_ELE,N_NODE,N_LOAD,N_DOF,IJK_ELE,X,Y,P_IJK, & RESULT_N)DIMENSION IJK_ELE(500,3),X(N_NODE),Y(N_NODE),P_IJK(N_LOAD,3), & RESULT_N(N_DOF)DO 10 I=1,N_DOF10 RESULT_N(I)=0.0DO 20 I=1,N_LOADII=P_IJK(I,1)RESULT_N(2*II-1)=P_IJK(I,2)20 RESULT_N(2*II)=P_IJK(I,3)RETURNENDcc to deal with BC(u) (here only for fixed displacement) using "1-0" method SUBROUTINE DO_BC(N_BC,N_BAND,N_DOF,IJK_U,AK,RESULT_N) DIMENSION RESULT_N(N_DOF),IJK_U(N_BC,3),AK(500,100)DO 30 I=1,N_BCIR=IJK_U(I,1)DO 30 J=2,3IF(IJK_U(I,J).EQ.0)THENELSEII=2*IR+J-3AK(II,1)=1.0RESULT_N(II)=0.0DO 10 JJ=2,N_BAND10 AK(II,JJ)=0.0DO 20 JJ=2,II20 AK(II-JJ+1,JJ)=0.0END IF30 CONTINUERETURNENDcc to solve the banded FEM equation by GAUSS eliminationSUBROUTINE SOLVE(N_NODE,N_DOF,N_BAND,AK,RESULT_N) DIMENSION RESULT_N(N_DOF),AK(500,100)DO 20 K=1,N_DOF-1IF(N_DOF.GT.K+N_BAND-1)IM=K+N_BAND-1IF(N_DOF.LE.K+N_BAND-1)IM=N_DOFDO 20 I=K+1,IML=I-K+1C=AK(K,L)/AK(K,1)IW=N_BAND-L+1DO 10 J=1,IWM=J+I-K10 AK(I,J)=AK(I,J)-C*AK(K,M)20 RESULT_N(I)=RESULT_N(I)-C*RESULT_N(K)RESULT_N(N_DOF)=RESULT_N(N_DOF)/AK(N_DOF,1)DO 40 I1=1,N_DOF-1I=N_DOF-I1IF(N_BAND.GT.N_DOF-I-1)JQ=N_DOF-I+1IF(N_BAND.LE.N_DOF-I-1)JQ=N_BANDDO 30 J=2,JQK=J+I-130 RESULT_N(I)=RESULT_N(I)-AK(I,J)*RESULT_N(K)40 RESULT_N(I)=RESULT_N(I)/AK(I,1)WRITE(8,50)50 FORMAT(/12X,'* * * * * RESULTS BY FEM2D * * * * *',//8X,&'--DISPLACEMENT OF NODE--'//5X,'NODE NO',8X,'X-DISP',8X,'Y-DISP') DO 60 I=1,N_NODE60 WRITE(8,70) I,RESULT_N(2*I-1),RESULT_N(2*I)70 FORMAT(8X,I5,7X,2E15.6)RETURNENDcc calculate the stress components of element and nodeSUBROUTINECAL_STS(N_ELE,N_NODE,N_DOF,PE,PR,IJK_ELE,X,Y,RESULT_N, &STS_ELE,STS_ND)DIMENSION IJK_ELE(500,3),X(N_NODE),Y(N_NODE),DD(3,3),BB(3,6), &SS(3,6),RESULT_N(N_DOF),DISP_E(6)DIMENSION STS_ELE(500,3),STS_ND(500,3)WRITE(8,10)10 FORMAT(//8X,'--STRESSES OF ELEMENT--')CALL CAL_DD(PE,PR,DD)DO 50 IE=1,N_ELECALL CAL_BB(IE,N_NODE,N_ELE,IJK_ELE,X,Y,AE,BB)DO 20 I=1,3DO 20 J=1,6SS(I,J)=0.0DO 20 K=1,320 SS(I,J)=SS(I,J)+DD(I,K)*BB(K,J)DO 30 I=1,3DO 30 J=1,2IH=2*(I-1)+JIW=2*(IJK_ELE(IE,I)-1)+J30 DISP_E(IH)=RESULT_N(IW)STX=0STY=0TXY=0DO 40 J=1,6STX=STX+SS(1,J)*DISP_E(J)STY=STY+SS(2,J)*DISP_E(J)40 TXY=TXY+SS(3,J)*DISP_E(J)STS_ELE(IE,1)=STXSTS_ELE(IE,2)=STYSTS_ELE(IE,3)=TXY50 WRITE(8,60)IE,STX,STY,TXY60 FORMAT(1X,'ELEMENT NO.=',I5/18X,'STX=',E12.6,5X,'STY=',&E12.6,2X,'TXY=',E12.6)c the following part is to calculate stress components of nodeWRITE(8,55)55 FORMAT(//8X,'--STRESSES OF NODE--')DO 90 I=1,N_NODEA=0.B=0.C=0.II=0DO 70 K=1,N_ELEDO 70 J=1,3IF(IJK_ELE(K,J).EQ.I) THENII=II+1A=A+STS_ELE(K,1)B=B+STS_ELE(K,2)C=C+STS_ELE(K,3)END IF70 CONTINUESTS_ND(I,1)=A/IISTS_ND(I,2)=B/IISTS_ND(I,3)=C/IIWRITE(8,75)I,STS_ND(I,1),STS_ND(I,2),STS_ND(I,3)75 FORMAT(1X,'NODE NO.=',I5/18X,'STX=',E12.6,5X,'STY=',&E12.6,2X,'TXY=',E12.6)90 CONTINUERETURNENDc FEM2D programm end[算例结果]:chengxu.for所输出的数据文件DATA.OUT数据内容如下:=========PLANE STRESS PROBLEM========* * * * * RESULTS BY FEM2D * * * * *--DISPLACEMENT OF NODE--NODE NO X-DISP Y-DISP1 .000000E+00 -.525275E+012 .000000E+00 -.225275E+013 -.108791E+01 -.137363E+014 .000000E+00 .000000E+005 -.824176E+00 .000000E+006 -.182418E+01 .000000E+00--STRESSES OF ELEMENT--ELEMENT NO.= 1STX=-.108791E+01 STY=-.300000E+01 TXY= .439560E+00ELEMENT NO.= 2STX=-.824176E+00 STY=-.225275E+01 TXY= .000000E+00ELEMENT NO.= 3STX=-.108791E+01 STY=-.137363E+01 TXY= .307692E+00ELEMENT NO.= 4STX=-.100000E+01 STY=-.137363E+01 TXY=-.131868E+00--STRESSES OF NODE--NODE NO.= 1STX=-.108791E+01 STY=-.300000E+01 TXY= .439560E+00NODE NO.= 2STX=-.100000E+01 STY=-.220879E+01 TXY= .249084E+00NODE NO.= 3STX=-.105861E+01 STY=-.191575E+01 TXY= .205128E+00NODE NO.= 4STX=-.824176E+00 STY=-.225275E+01 TXY= .000000E+00NODE NO.= 5STX=-.970696E+00 STY=-.166667E+01 TXY= .586081E-01NODE NO.= 6STX=-.100000E+01 STY=-.137363E+01 TXY=-.131868E+00[结论与体会]:通过本次的课程设计,我对有限元的概念有了更加深刻的理解,同时也弥补了平时学习是疏忽的地方,充实了有限元知识。
《有限元及程程序设计》课程设计说明书
河北工程大学《有限元及程序设计》课程设计说明书课程设计题目:平面钢架有限元程序功能修改设计副标题:1增加非节点荷载为集中力偶、纵向均布力以及线性分布力时固端反力的计算功能2 结果以文件形式输出指导教师:班级:姓名:学号:摘要有限元法是现代工程数值分析中应用广泛的一种方法,本文根据线性有限元理论对受有五种不同荷载的三杆钢架进行静力分析,将结构离散为三个单元四个节点。
分别建立每个单元的单元刚度矩阵和节点荷载列阵,根据刚度集成法建立了结构的总刚度矩阵和节点荷载列阵,得出结构的平衡方程,并用对角线元素置一法引入边界条件,用高斯消元法求解平衡方程。
最后编写C程序求解此问题,并通过与手算的比较验证了程序的准确性,通过增加一个杆件说明程序的通用性键词:有限元法杆平面刚架刚度矩阵对角线元素置一法 C语言A b s t r a c tFinite Element Method (FEM) makes an extensive use in the numerical analysis of modern construction. In this paper, we study Static state of the Plane frame which is loaded by five different kinds of loads based on linear finite element theory loads; the structure is divided into three units and four nodes. The stiffness matrix array node load of each unit is set up, According to Stiffness integration method we establish the total stiffness matrix and load node array of the structure which is aimed drawing the balance equation of the structure, and then introduce the boundary conditions by buy-one-diagonal elements .we can use Gaussian elimination method for solving equilibrium equations. Finally, we program procedures for the preparation of C to solve this problem, and through comparison with the hand count to verify the accuracy of the procedure, by adding a bar to descript generic property of the procedureKey words: Finite Element Method (FEM) Planar rigid frame Buy-one-diagonal elements Stiffness matrices C language目录设计题目说明-------------------------------------------------4 1.用有限元法进行手算----------------------------------------41.1化分单元,选取坐标系----------------------------------------------4 1.2求局部坐标系下各单元的单元刚度矩阵--------------------------------5 1.3求整体坐标系下各单元的单元刚度矩阵--------------------------------5 1.4求整体刚度矩阵----------------------------------------------------6 1.5求非节点荷载引起的等效节点荷载及节点荷载列阵----------------------6 1.6列整刚方程,求节点位移--------------------------------------------9 1.7求单元内力----- --------------------------------------------------101.7.1转换位移列阵- ---------------------------------------------------101.7.2求内力- --------------------------------------------------------111.8画内力图并列表--------------------------------------------132.程序设计与上机调试结果-------------------------------------142.1说明与结果- ------------------------------------------------------14 2.2程序设计中一些问题的描述- ----------------------------------------142.2.1数字描述--------------------------------------------------------142.2.2程序总框图------------------------------------------------------16主要结论-----------------------------------------------------16 设计心得体会---------------------------------------------------------16参考文献-----------------------------------------------------17附录C程序源代码及修改注释- --------------------------------17求图示平面刚架节点位移及各杆的内力错误!具体参数:面积弹性模量E=27/101.2mKN ⨯惯性矩I=421016667.4m-⨯1用有限元法进行手算1.1划分单元,标出单元号码及节点号码;选取整体坐标系O x y ,局部坐标系Oxy ,并标上单元的局部节点码i(1),j(2),见下页图。
c++面向对象的有限元程序设计
《C++面向对象的有限元程序设计》一、引言在计算机科学和工程中,有限元方法是一种数值分析技术,广泛应用于工程设计和科学研究领域。
C++作为一种流行的编程语言,在有限元程序设计中也扮演了重要角色。
本文将从深度和广度两个方面对C++面向对象的有限元程序设计进行全面评估,并撰写一篇有价值的文章,以帮助读者更全面、深刻地理解这一主题。
二、C++面向对象的有限元程序设计的基本概念1. 有限元方法的基本原理有限元方法是一种数值计算方法,用于求解偏微分方程和积分方程。
通过将求解区域分割为有限个单元,建立单元之间的联系,将连续的问题转化为离散的代数问题,从而得到数值解。
在有限元程序设计中,需要考虑如何有效地表示和处理单元、节点、边界条件等信息。
2. 面向对象的程序设计思想面向对象的程序设计思想强调将现实世界中的问题抽象成对象,通过封装、继承和多态等机制构建模块化、可复用的代码结构。
在C++中,类和对象是面向对象程序设计的核心概念,有限元程序设计可以通过抽象出单元、节点、网格等对象来实现。
三、深入探讨C++面向对象的有限元程序设计1. C++语言特性在有限元程序设计中的应用在C++语言中,有丰富的特性可以用于实现面向对象的有限元程序设计。
类的封装可以用于表示单元和节点对象的属性和行为,继承可以用于构建具体单元类型的层次结构,多态可以实现对不同单元类型的统一处理。
2. 优化设计思路下的C++面向对象有限元程序设计针对大规模的有限元计算,优化的设计思路是必不可少的。
C++中提供了丰富的性能优化手段,如模板元编程、内联函数、移动语义等,可以在面向对象的有限元程序设计中发挥重要作用。
四、总结和回顾在本文中,我们对C++面向对象的有限元程序设计进行了全面评估,并撰写了一篇有价值的文章。
通过深入探讨原理、语言特性和优化设计思路,帮助读者更全面地理解了这一主题。
从我的个人观点看,C++面向对象的有限元程序设计是一个值得深入研究的领域,它不仅涉及到程序设计技术,还涉及到数值计算和工程应用等多个领域的知识。
有限元编程作业
*Elset, elset=__PickedSurf9_S4, internal, instance=Ball-1
7, 149, 162, 292, 485, 487,……,1098, 1192, 1218, 1260
*Elset, elset=__PickedSurf9_S2, internal, instance=Ball-1
*Element, type=C3D4
1, 163, 164, 165, 166
……
1357, 297, 49, 47, 51
*Nset, nset=_PickedSet2, internal, generate
1, 318, 1
*Elset, elset=_PickedSet2, internal, generate
**定义材料Mat-Ball和Mat-Plate
*Material, name=Mat-Ball
*Density
7800.,
*Elastic
2.068e+11, 0.3
*Material, name=Mat-Plate
*Density
7800.,
*Elastic
2.078e+11, 0.3
*Element, type=C3D8R
1, 243, 244, 17, 16, 1561, 1562, 1335, 1334
……
6135, 6327, 5480, 6359, 7645, 6798, 6797, 7677
**内部节点集
*Nset, nset=_PickedSet2, internal, generate
** STEP: Step-1
**定义一般静态分析步
有限元分析程序设计

结构有限元分析程序设计绪论§0.1 开设“有限元程序设计”课程的意义和目的§0.2 课程特点§0.3 课程安排§0.4 课程要求§0.5 基本方法复习$0.1 意义和目的1.有限元数值分析技术本身要求工程设计研究人员掌握1). 有限元数值分析技术的完善标志着现代计算力学的真正成熟和实用化,已在各种力学中得到了广泛的应用。
比如:,已杨为工程结构分析中最得以收敛的技术手段,现代功用大致有:a). 现代结构论证。
对结构设计从内力,位移等方面进行优劣评定,从而进行结构优化设计。
b)可取代部份实验,局部实验+有限元分析,是现代工程设计研究方法的一大特点。
c)结构的各种功能分析(疲劳断裂,可靠性分析等)都以有限元分析工具作为核心的计算工具。
2). 有限元数值分析本身包括着理论+技术实现(本身功用所绝定的)有限元数值分析本身包括着泛函理论+分片插值函数+程序设计2. 有限元分析的技术实现(近十佘年的事)更依赖于计算机程序设计有限元分析的技术取得的巨大的成就,从某种意义上说,得益于计算机硬件技术的发展和程序设计技术的发展,这两者的依赖性在当代表现得更加突出。
(如可视化技术)3.从学习的角度,不仅要学习理论,而且要从程序设计设计角度对这些理论的技术实现有一个深入的了解,应当致力于掌握这些技术实现能力,从而开发它,发展它。
(理论本身还有待于进一步完美相应的程序设计必须去开发)4.程序设计不仅是实现有限元数值分析的工具和桥梁,而且在以下诸方面也有意义:1). 精通基本概念,深化理论认识;2). 锻炼实际工程分析,实际动手的能力;3). 获得以后工作中必备的工具。
(作业+老师给元素库)目的:通过讲述有限元程序设计的技术与技巧,便能达到自编自读的能力。
§0.2 课程特点总描述:理论+算法+数据结构(程序设计的意义)理论:有限元算法,构造,步骤,解的等外性,收敛性,稳定性,误差分析算法;指求解过程的技术方法,含两方面的含义;a. 有限元数值分析算法,b, 与数据结构有关的算法(总刚稀疏存贮,提取,节点优化编号等)数据结构:指各向量矩阵存贮管理与实现,辅助管理结构(指针,数据记录等)具体特点:理论性强:能量泛函理论+有限元构造算法+数据结构构造算法内容繁杂:理论方法+技术方法+技术技巧技巧性强:排序,管理结构(指针生成,整型运算等)§0.3 课程安排①. 单元刚度矩阵及元素设计(单元刚阵算法,杆梁平面分析,板弯非协调元等)②. 总刚的形式及程序设计(单刚提前准备,技术复杂)③. l边界条件及程序设计(等效荷载计算,位移边界条件置入,多工况的对称性)④. 总刚线性方程组求解(LDL T分解,分块算法,子结构算法,波前法)⑤.单元应力计算+应力处理与改善。
有限元 程序设计

0 0 0 0 K 58 0 K 78 K 88
顶线以上零元素无须存贮,仅顶线以下元素。
一维数组[A]存贮刚度矩阵[K]
K11 K
K12 K 22
0 K 23 K 33
K14 0 K 34 K 44
(2) 变带宽存贮(一维压缩存贮)
等带宽存贮虽然已经节省了不少内存,但认真 研究半带宽内的元素,还有相当数量的零元素。在 平衡方程求解过程中,有些零元素只增加运算工作 量而对计算结果不产生影响。如果这些零元素不存、 不算,更能节省内存和运算时间,采用变带宽存贮 可以实现(也称一维数组存贮) 。变带宽存贮编程
结束
2、单元分析
(1)各单元的bi,ci(i,j,m) , 面积A; (2)应变矩阵[B],应力矩阵[S]; (3)单元刚度矩阵[k]; (4)单元等价载荷列向量[F]。
开始 输入基本数据 计算单元刚度矩阵 形成总体刚度矩阵 形成结点荷载向量
3、系统分析
(1)整体刚度矩阵[K]的组装; (2)整体载荷列阵{P}的形成;
从第j列的主对角线元素起到该列上方第一个非零 元素为止,所含元素的个数称为第j列的列高,记为hj ; 如果把第j列上方第1个非零元素的行号记为mj,则第j 列的列高为 hj = j - mj + 1 其实,hj就是第j行的左带宽,因而必有 UBW= max(hj)
j=1,2, …,N
利用节点位移信息数组 ID (去约束后节点位移自 由度编码),可容易地确定刚度矩阵 [K] 任何一列的 列高。
0 0 0 K 45 K 55
0 0 K 36 K 46 K 56 K 66
0 0 0 0 0 K 67 K 77
西工大2021年4月机考《有限元及程序设计》作业参考答案非免费

西工大2021年4月机考《有限元及程序设计》作业试卷总分:100 得分:100答案网叫福到(这四个字的拼音)一、单选题(共11 道试题,共22 分)1.下列属于平面应力问题的是()。
A.平板坝的平板支墩B.挡土墙C.重力水坝D.受内水压力作用的圆管正确答案:A2.下列属于不规则单元的有()。
A.正四面体单元B.正三棱体单元C.任意四面体单元D.正六面体单元3.φ=by2能解决矩形板()问题。
A.左右均布拉压B.上下均布拉压C.纯剪切D.纯弯曲4.在应力函数上任意增减一个(),对应力分量无影响。
A.线性项B.二次项C.三次项D.常数项5.空间问题的基本平衡微分方程有()个。
A.2B.3C.4D.56.φ=cxy能解决矩形板()问题。
A.左右均布拉压B.上下均布拉压C.纯剪切D.纯弯曲7.薄板的边界不包括()。
A.简支边界B.固定边界C.自由边界和荷载边界D.非固定边界8.空间问题的基本未知位移分量有()个。
A.2B.3C.4D.59.下列关于高精度单元描述正确的是()。
A.等参元的位移模式和坐标变换采用不同的形函数B.矩形单元形状规则,因而使用范围较广C.6结点三角形单元、10结点三角形单元、8结点矩形单元和12结点矩形单元的单元刚度矩阵的建立过程是不一样的D.6结点三角形单元较容易模拟物体的边界形状10.下列不属于提高单元精度的方法是()。
A.增加单元结点数目B.在单元内增设结点C.减少单元结点数目D.设等参元11.下列关于等参元的叙述不正确的是()。
A.精度较高B.能较好的模拟边界条件C.输入的信息量较少D.输入的信息量较多二、多选题(共16 道试题,共32 分)1.弹性力学的基本假定有()。
A.假设物体是连续的B.假设物体是均匀的和各向同性的C.假设物体是完全弹性的D.假设物体内无初应力E.假设物体的变形是很小的2.下列属于高精度空间单元的有()。
A.10结点30自由度四面体单元B.20结点60自由度六面体单元C.6结点三角形单元D.4结点48自由度四面体单元3.边界条件的处理方法有()。
西北工业大学网络教育学院 有限元及程序设计 章节测试1-11含答案
A、 正确 B、 错误 标准答案:A 8. ( 单选题 ) 极坐标系下的基本未知量只有径向正应力σr,环向正应力σθ,剪应力τrθ( )。
A、 正确 B、 错误 标准答案:A 7. ( 单选题 ) 薄板的边界不包括( )。(本题 13 分)
第3页共6页
西北工业大学网络教育学院 有限元及程序设计 章节测试 1-11
A、 简支边界 B、 固定边界 C、 自由边界和荷载边界 D、 非固定边界 标准答案:D 8. ( 单选题 ) 通过挠曲微分方程求出位移后即可确定所有物理量,是按坐标求解法( )。 A、 正确 B、 错误 标准答案:B
应力函数φ=cθ求得圆盘的应力为
, 的值为(
A、 1 B、 0 C、 -1 D、 2 标准答案:B 2. ( 多选题 ) 轴对称情况下,应力分量可简化为( )。(本题 12 分)
)。
A、
B、
C、
D、
1 标准答案:ABC
3. ( 单选题 ) 轴对称问题应力分量只是坐标 r 的函数,不随θ而变,同时剪应力为零,应
A、 线性项 B、 非线性项 C、 边界项 D、 体力项 标准答案:A 8. ( 单选题 ) 按应力求解具体可分为逆解法和 半逆解法 两种( )。(本题 13 分)
A、 正确 B、 错误 标准答案:A
1. ( 单选题 ) 已知圆环在 r=a 的内边界被固定,在 r=b 的外边界作用着均布剪力τ0,用
西北工业大学网络教育学院 有限元及程序设计 章节测试 1-11
1. ( 多选题 ) 弹性力学的基本假设有( )。(本题 13 分) A、 假设物体是连续的 B、 假设物体是均匀的和各向同性的 C、 假设物体是完全弹性
《有限元程序设计》课件
有限元程序设计的前景展望
广泛应用
随着计算机技术的不断发展,有 限元程序设计将在更多领域得到 广泛应用,为工程设计和科学研 究提供有力支持。
技术创新
未来有限元程序设计将不断涌现 出新的技术和方法,推动该领域 不断发展壮大。
国际化发展
随着国际化交流的加强,有限元 程序设计将实现国际化发展,推 动国际合作和共同进步。
求解
求解整体方程组得到近似解。
有限元方法的应用领域
01
02
03
04
结构力学
用于分析各种结构的力学行为 ,如桥梁、建筑、机械零件等
。
流体动力学
用于模拟流体在各种介质中的 流动行为,如流体动力学、渗
流等。
热传导
用于分析温度场在各种介质中 的分布和变化。
电磁场
用于分析电磁场在各种介质中 的分布和变化,如电磁场、电
磁波等。
02
有限元程序设计的关键技术
网格生成技术
网格生成技术是有限元分析中 的重要步骤,它涉及到将连续 的物理空间离散化为有限个小 的单元,以便进行数值计算。
网格的生成需要满足一定的规 则和条件,以保证计算的精度
和稳定性。
常见的网格生成方法包括结构 化网格、非结构化网格和自适 应网格等。
网格生成技术需要考虑的问题 包括网格大小、形状、方向和 连接方式等。
02
详细描述
弹性地基板的有限元分析是一 个二维问题,需要考虑复杂的 边界条件和非线性方程的求解 。通过将地基板划分为若干个 四边形单元,可以建立非线性 方程组进行求解。
03
计算过程
04
首先将地基板划分为若干个四边 形单元,然后根据每个单元的物 理性质和边界条件建立非线性方 程组。最后通过迭代方法求解非 线性方程组得到每个节点的位移 和应力。
Matlab 有限元法计算分析程序编写
3) 数值、变量 数值采用习惯的十进制表示,可以带小数点或负号,如 3 -99 0.001 9.456 1.3e-3 4.5e33 变量命名规则 变量名、函数名是对字母大小写敏感的 变量名、函数名的第一个字符必须是英文字母,最多可包 含31个字符 变量名中不能包含空格、标点 4) 表达式 MATLAB书写表达式的规则与手写算式几乎完全相同,具 体是 表达式由变量名、运算符合函数和组成 表达式将按与常规相同的优先级自左向右执行运算 优先级的规定:幂运算 > 乘除 > 加减 括号可以改变运算的次序
a i = βi
⎡ k 1,1 ⎢ ⎢k 2 ,1 ⎢ M ⎢ ⎢ 0 ⎢ M ⎢ ⎢ k n ,i ⎣ L L 0 L k 1, n ⎤ ⎧ a 1 ⎫ ⎧ P1 ⎫ ⎥ L L 0 L k 2 , n ⎥ ⎪ a 1 ⎪ ⎪P2 ⎪ ⎪ ⎪ ⎪ ⎪ M O M O M ⎥⎪ M ⎪ ⎪ M ⎪ ⎪ ⎪ ⎪ ⎪ ⎥⎨ ⎬ = ⎨ ⎬ L L 1 L 0 ⎥ ⎪ a i ⎪ ⎪β i ⎪ M O M O M ⎥⎪ M ⎪ ⎪ M ⎪ ⎥⎪ ⎪ ⎪ ⎪ L L 0 L k n , n ⎥ ⎪a n ⎪ ⎪Pn ⎪ ⎦⎩ ⎭ ⎩ ⎭
2) 简单矩阵的输入 (1) 在键盘上输入下列内容 A=[1,2,3;4,5,6;7,8,9] (2) 按【Enter】键,指令被执行 (3) 在指令被执行后,MATLAB指令窗中将显示以下结果 A = ⎡ 1 2 3⎤ 1 2 3 A = ⎢ 4 5 6⎥ ⎥ ⎢ 4 5 6 ⎢7 8 9 ⎥ ⎦ ⎣ 7 8 9 [说明]:在全部键入一个指令行内容后,必须按下【Eenter】键,该指令 才会被执行。 • 直接输入矩阵时,矩阵元素用空格或逗号‘,’分开;矩阵行用“;” 隔离,整个矩阵放在“[]”里。 • 在MATLAB里,不必事先对矩阵维数作任何说明,存储时将自动 配置 • 指令执行后,矩阵A被保存在MATLAB的工作空间中,以备后用。 如果用户不用Clear指令清除它或对它重新赋值,那么该矩阵会一直保 存在工作空间中,直到MATLAB指令窗被关闭。 • MATLAB对变量的大小写敏感。比如本例中的矩阵赋给了变量A, 而不是a。
有限元分析程序设计
结构有限元分析程序设计绪论§ 开设“有限元程序设计”课程的意义和目的§ 课程特点§ 课程安排§ 课程要求§ 基本方法复习$ 意义和目的1.有限元数值分析技术本身要求工程设计研究人员掌握1). 有限元数值分析技术的完善标志着现代计算力学的真正成熟和实用化,已在各种力学中得到了广泛的应用。
比如:,已杨为工程结构分析中最得以收敛的技术手段,现代功用大致有:a). 现代结构论证。
对结构设计从内力,位移等方面进行优劣评定,从而进行结构优化设计。
b)可取代部份实验,局部实验+有限元分析,是现代工程设计研究方法的一大特点。
c)结构的各种功能分析(疲劳断裂,可靠性分析等)都以有限元分析工具作为核心的计算工具。
2). 有限元数值分析本身包括着理论+技术实现(本身功用所绝定的)有限元数值分析本身包括着泛函理论+分片插值函数+程序设计2. 有限元分析的技术实现(近十佘年的事)更依赖于计算机程序设计有限元分析的技术取得的巨大的成就,从某种意义上说,得益于计算机硬件技术的发展和程序设计技术的发展,这两者的依赖性在当代表现得更加突出。
(如可视化技术)3.从学习的角度,不仅要学习理论,而且要从程序设计设计角度对这些理论的技术实现有一个深入的了解,应当致力于掌握这些技术实现能力,从而开发它,发展它。
(理论本身还有待于进一步完美相应的程序设计必须去开发)4.程序设计不仅是实现有限元数值分析的工具和桥梁,而且在以下诸方面也有意义:1). 精通基本概念,深化理论认识;2). 锻炼实际工程分析,实际动手的能力;3). 获得以后工作中必备的工具。
(作业+老师给元素库)目的:通过讲述有限元程序设计的技术与技巧,便能达到自编自读的能力。
§ 课程特点总描述:理论+算法+数据结构(程序设计的意义)理论:有限元算法,构造,步骤,解的等外性,收敛性,稳定性,误差分析算法;指求解过程的技术方法,含两方面的含义;a. 有限元数值分析算法,b, 与数据结构有关的算法(总刚稀疏存贮,提取,节点优化编号等)数据结构:指各向量矩阵存贮管理与实现,辅助管理结构(指针,数据记录等)具体特点:理论性强:能量泛函理论+有限元构造算法+数据结构构造算法内容繁杂:理论方法+技术方法+技术技巧技巧性强:排序,管理结构(指针生成,整型运算等)§ 课程安排①. 单元刚度矩阵及元素设计(单元刚阵算法,杆梁平面分析,板弯非协调元等)②. 总刚的形式及程序设计(单刚提前准备,技术复杂)③. l边界条件及程序设计(等效荷载计算,位移边界条件置入,多工况的对称性)④. 总刚线性方程组求解(LDL T分解,分块算法,子结构算法,波前法)⑤.单元应力计算+应力处理与改善。
有限元教材-第十章有限元程序设计
有限元教材-第十章有限元程序设计第十章有限元程序设计有限元方法作为一门系统的技术,仅学会了它的基本理论是远远不够的,只有形成完整的计算程序,问题才最终得到了解决。
完成这样的有限元程序设计是一项工作量很大的工程。
本章就是要结合简单的有限元教学程序FEMED,简要介绍有限元程序设计技术。
FEMED 是专为有限元程序设计教学编制的程序,它不包含复杂的前后处理功能,可进行平面问题及平面桁架的线弹性静力分析,在程序结构上与大型程序类似,具有计算单元的任意扩充功能,在方程的组集和求解上也采用了较为流行的变带宽存储方式。
有限元程序大致可分为两类,第一类是专用程序,主要用于研究或教学,一般这类程序规模较小,前后处理功能较弱。
用于研究的程序能够解一些特殊的问题,满足研究工作的需要。
而教学程序则是为了学生了解有限元的主要结构和设计方法设计的,程序比较简单,FEMED就属于这类程序。
第二类是大型通用程序,是大型结构分析的得力工具,目前国际上流行的大约有2000多种。
常用的有NASTRAN、MARC、ANSYS、ADINA和ABAQUS等。
这类程序一般前后处理功能比较强,有友好的界面,能进行大型计算,但往往无法完成具有特殊要求的计算。
通过本章的学习,使读者初步掌握有限元编程的基本方法,具有开发特殊功能的专用程序或为通用程序开发具有特殊功能的计算模块的能力。
§10.1有限元程序的基本结构有限元程序一般包括三项基本内容:前处理、结构分析和后处理。
早期有限元分析软件的研究重点在于推导新的高效率求解方法和高精度的单元,随着数值分析方法的逐步完善,尤其是计算机内存和运算速度的飞速发展,整个计算系统用于求解运算的时间越来越少,加之求解问题的日益大型化和复杂化,使得数据准备和运算结果的表现问题日益突出。
因此目前几乎所有的商业化有限元程序系统都有功能很强的前后处理模块,这直接关系到分析软件的可推广性。
它是商用有限元软件不可或缺的部分,但它不是有限元的中心部分,在本书中不作详细介绍。
有限元及程序设计 模拟考试题及参考答案
第 1 页 共 10 页
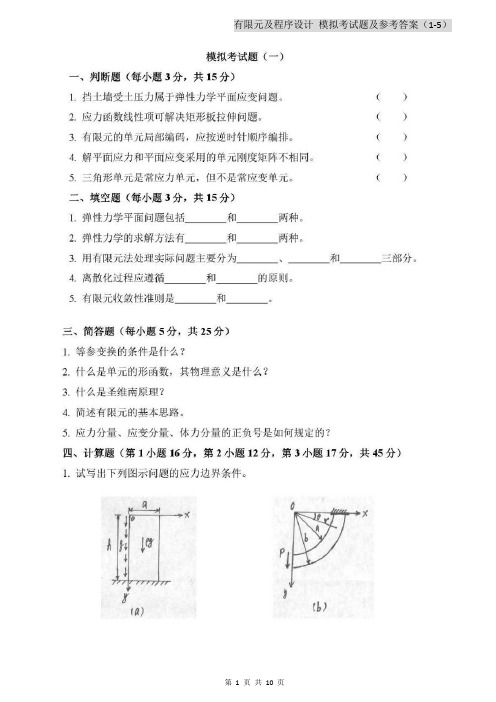
有限元及程序设计 模拟考试题及参考答案(1-5)
第 2 页 共 10 页
有限元及程序设计 模拟考试题及参考答案(1-5)
第 3 页 共 10 页
有限元及程序设计 模拟考试题及参考答案(1-5)
第 4 页 共 10 页
有限元及程序设计 模拟考试题及参考答案(1-5)
有限元及程序设计 模拟考试题及参考答案(1-5)
第 10 页 共 10 页
第 5 页 共 10 页
有限元及程序设计 模拟考试题及参考答案(1-5)
第 6 页 共 10 页
有限元及程序设计 模拟考试题及参考答案(1-5)
第 7 页 共 10 页
有限元及程序设计 模拟考试题及参考答案(1-5)
第 8 页 共 10 页
有限元及程序设计 模拟考试题及参考答案(1-)第 9 页 共 10 页
有限元的matlab编程

本程序的网架位移求解函数附在主程序后面,主程序运行时调用该函数。
完整ppt
14
几何建模 定义荷载
用自定义输入
加下划线的为单元编号
完整ppt
5
形成等效荷载列阵
f=[0;0;0;a;0;0;0;a;0;0;0;a;0;0;0;a;0;0;0;a];%每个节点两个自由度,a 为之前输入的节点力
集成总刚:
获取单元两端节点坐标
xi = Node( Element( ie, 1 ), 1 ) ;%ie为单元号,以下相同 yi = Node( Element( ie, 1 ), 2 ) ; xj = Node( Element( ie, 2 ), 1 ) ; yj = Node( Element( ie, 2 ), 2 ) ;
节点号:',num2str(Element(ie,2)),' 轴力:',num2str(nodef(1))] ) ;
完整ppt
12
end
例二:网架
完整ppt
13
思路分析
几点说明
网架是由多根杆件按照一定的网格形式通过节点连结而成的空间结构。构成 网架的基本单元有三角锥,三棱体,正方体,截头四角锥等。鉴于网架的形 式较多,本程序提供一种通用的网架输入方法,但录入较为繁琐,同时提供 一种正放四角锥网架的简易输入方法作为典型。
有限元编程示例
完整ppt
1
例一:桁架
题目描述:
如下图所示的平面桁架,杆件长度、弹性模量、截 面积以及所受节点力P的大小可以自行定义。求节 点位移及杆件轴力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
B.正确
2.在应力函数中任意减少一个线性项对应力无影响。
A.错误
B.正确
3.位移模式的选取必须遵循几何近似和物理近似两条原则。
A.错误
B.正确
4.解平面应力和平面应变问题采用的应力矩阵相同。
A.错误
B.正确
5.应力函数φ=ax2能解决矩形板纯弯曲问题。
A.错误
B.正确
20.有限元的单元局部编码,应按逆时针规律编排。
A.错误
B.正确
21.按应力求解要同时满足平衡方程、相容方程和应力边界条件。
A.错误
B.正确
22.直角坐标与极坐标系下基本方程完全类似,相应未知量也相同。
A.错误
B.正确
23.剪力墙墙体受自重作用属于平面应变问题,天然气管道属于平面应力问题。
A.错误
B.正确
6.在体力为常量时,平面问题应力分布与材料的弹性常数无关。
A.错误
B.正确
7.应力函数线性项可解决矩形板拉伸问题。
A.错误
B.正确
8.挡土墙受土压力属于弹性力学平面应变问题。
A.错误
B.正确
9.按位移法求解弹性力学问题时需满足平衡方程和应变协调方程。
A.位移近似
B.几何近似
C.物理近似
D.形状近似
13.弹性力学平面问题按应力求解具体可分为( )两种。
A.逆解法
B.顺解法
C.半逆解法
D.半顺解法
14.有限元收敛性准则是( )。
A.完备性准则
B.对称性准则
C.平衡性准则
D.协调性准则
15.下面说法错误的是( )。
A.错误
B.正确
C.局部分析
D.整体分析
2.薄板小挠度弯曲理论的基本假定是( )。
A.直法线假定
B.法向位移假定
C.中面位移假定
D.板内无挤压假定
3.弹性力学问题的求解方法有( )。
A.按应变求解
B.按应力求解
C.按体力求解
D.按位移求解
4.弹性力学的边界条件有( )。
A.位移边界条件
7.弹性力学的基本假定有( )。
A.假设物体是连续的
B.假设物体是均匀的和各向同性的
C.假设物体是完全弹性的
D.假设物体内无初应力
E.假设物体的变形是很小的
8.总体刚度矩阵具有( )性质。
A.对称性
B.稀疏性
C.带状分布性
D.奇异性
9.边界条件的处理方法有( )。
A.应力以正面正向,负面负向为正
B.正应变以伸长为正
C.剪应变以夹角小为正
D.体力、面应、位移以沿坐标轴正向为正
16.边界内应力的处理最常用的方法有( )。
A.结点法
B.绕结点平均法
C.二单元平均法
D.应力平均法
三、 判断题 (共 23 道试题,共 46 分)
1.应力函数φ=ay3能解决矩形板受均布拉(压)力的问题。
A.线性项
B.二次项
C.三次项
D.常数项
8.空间问题的基本平衡微分方程有( )个。
A.2
B.3
C.4
D.5
9.下列不属于提高单元精度的方法是( )。
A.增加单元结点数目
B.在单元内增设结点
C.减少单元结点数目
D.设等参元
10.下列属于平面应力问题的是( )。
试卷总分:100 得分:98
一、 单选题 (共 11 道试题,共 22 分)
1.φ=cxy能解决矩形板( )问题。
A.左右均布拉压
B.上下均布拉压
C.纯剪切
D.纯弯曲
2.下列关于高精度单元描述正确的是( )。
A.等参元的位移模式和坐标变换采用不同的形函数
B.矩形单元形状规则,因而使用范围较广
A.错误
B.正确
10.三角形单元是常应力单元,但不是常应变单元。
A.错误
B.正确
11.三结点三角形单元是常应力单元,但不是常应变单元。
A.错误
B.正确
12.有限元解薄板问题的基本单元有矩形薄板单元和三角形薄板单元,其中矩形薄板单元是完全协调单元。
A.错误
B.正确
C.6结点三角形单元、10结点三角形单元、8结点矩形单元和12结点矩形单元的单元刚度矩阵的建立过程是不一样的
D.6结点三角形单元较容易模拟物体的边界形状
3.φ=by2能解决矩形板( )问题。
A.左右均布拉压
B.上下均布拉压
C.纯剪切
D.纯弯曲
4.下列关于等参元的叙述不正确的是( )。
A.平板坝的平板支墩
B.挡土墙
C.重力水坝
D.受内水压力作用的圆管
11.薄板的边界不包括( )。
A.简支边界
B.固定边界
C.自由边界和荷载边界
D.非固定边界
二、 多选题 (共 16 道试题,共 32 分)
1.用有限元法处理实际问题主要分为( )三部分。
A.离散化
B.单元分析
13.有限元离散结构时,在应力变化较大的区域应采用较密网格。
A.错误
B.正确
14.如果均采用三角形单元,则平面应力问题和平面应变问题单元刚度矩阵相同。
A.错误
B.正确
15.解平面应力和平面应变采用的单元刚度矩阵不相同。
A.错误
B.正确
16.矩形单元的公式推导简单,但精度比三结点三角形单元低。
B.应力边界条件
C.应变边界条件
D.混合边界条件
5.总体刚度矩阵的形成方法有( )。
A.结点平衡法
B.直接刚度法
C.间接刚度法
D.位移法
6.下列属于高精度空间单元的有( )。
A.10结点30自由度四面体单元
B.20结点60自由度六面体单元
C.6结点三角形单元
D.4结点48自由度四面体单元
A.错误
B.正确
ห้องสมุดไป่ตู้
17.受自重作用的门属于平面应力问题,挡土墙受土压力属于平面应变问题。
A.错误
B.正确
18.重力水坝属于弹性力学平面应力问题。
A.错误
B.正确
19.在体力为常量时,平衡方程、相容方程及应力边界条件中均不含弹性常数E和μ,故我们可以由一种材料替代另一种材料,用平面应力问题替代平面应变问题作实验,得到的应力是完全一样的。
A.划0置1法
B.置大数法
C.划1置0法
D.置小数法
10.弹性力学的基本方程包括( )。
A.平衡方程
B.应力方程
C.几何方程
D.物理方程
11.弹性力学平面问题包括( )两种。
A.平面物理问题
B.平面几何问题
C.平面应力问题
D.平面应变问题
12.离散化过程应遵循( )的原则。
A.精度较高
B.能较好的模拟边界条件
C.输入的信息量较少
D.输入的信息量较多
5.空间问题的基本未知位移分量有( )个。
A.2
B.3
C.4
D.5
6.下列属于不规则单元的有( )。
A.正四面体单元
B.正三棱体单元
C.任意四面体单元
D.正六面体单元
7.在应力函数上任意增减一个( ),对应力分量无影响。