凸轮机构matlab程序
基于MATLAB的凸轮设计
基于MATLAB的凸轮设计凸轮是一种用于转动机件的机械元件,常用于驱动一些运动部件做往复运动或者周期性运动。
在机械设计中,通过凸轮的设计可以实现复杂的运动路径,以及具有特定速度和加速度要求的运动。
MATLAB是一种强大的数学计算和编程环境,可以用于进行科学计算、数据分析和算法开发。
在凸轮设计中,MATLAB可以用于凸轮曲线的生成、设计和优化。
本文将介绍如何基于MATLAB进行凸轮设计。
在凸轮设计中,最重要的是凸轮曲线的生成。
凸轮曲线是一个由数据点组成的模板,通过插值或者数值逼近的方法可以生成一个光滑的凸轮曲线。
在 MATLAB 中,可以使用插值函数 interp1 或者曲线拟合函数polyfit 进行凸轮曲线的生成。
具体步骤如下:1.定义凸轮的设计参数,例如凸轮的半径、凸轮转动的角度范围等;2.根据凸轮的设计参数,生成一些数据点,这些数据点可以通过数学计算或者几何建模等方式得到;3. 使用插值函数 interp1 或者曲线拟合函数 polyfit 对这些数据点进行插值或者拟合,得到一个平滑的曲线;4.根据凸轮转动的角度范围,生成一系列角度的数据点;5. 使用插值函数 interp1 或者曲线拟合函数 polyval 对这些角度的数据点进行插值或者拟合,得到一系列对应的曲线坐标点;6.将这些坐标点绘制成凸轮曲线,并进行可视化。
除了凸轮曲线的生成,MATLAB 还可以用于凸轮的设计和优化。
凸轮设计包括凸轮的尺寸设计、运动路径设计等。
在 MATLAB 中,可以使用优化函数 fmincon 或者遗传算法函数 ga 进行凸轮设计的优化,以获得符合设计要求的凸轮参数。
具体步骤如下:1.定义凸轮的设计变量和目标函数。
设计变量可以是凸轮的尺寸参数,例如凸轮半径、凸轮高度等;目标函数可以是凸轮的运动路径误差、速度误差等。
2.定义凸轮的约束条件。
约束条件可以是凸轮的尺寸范围、速度和加速度的限制等。
3. 使用优化函数 fmincon 或者遗传算法函数 ga 对凸轮的设计变量进行优化,以使目标函数最小化或者最大化。
基于MATLAB的高次多项式凸轮型线优化设计
基于MATLAB的高次多项式凸轮型线优化设计
设计人员(按贡献大小排序): 唐俊杰(12011010093) 卫健行(120101010092) 王荟博(120101010095) 指导老师:王葛
摘要
动力凸轮型线的设计十分重要 ,以高次多项式凸轮型线为例 ,在基于丰满 系 数 和 磨 损 设 计 多 目 标 函 数 情 况 下 , 利 用 MATLAB 及 其 优 化 工 具 箱 (optimizationtoolbox)对目标函数数学模型进行优化求解。应用MATLAB的优 化函数提供的强大计算功能 ,确定了凸轮型线高次五项式函数中的系数 ,并 能快速找到目标函数的优化值。显著提高了型线优化设计的速度和精度 , 还可根据实际情况灵活地调整权重系数W1和W2的值的大小,计算方便快捷。 在与传统设计方法比较结果表明,经优化设计,提高了动力凸轮的丰满系数, 降低了凸轮型线的磨损。
凸轮型线优化设计目标函数
凸轮型线对系统的工作质量有着重要的影响 ,所以配气凸轮的优化设计 , 在很大程度上能提高内燃机的工作性能[4]。为使配气机构具备良好的充、 排气性能要求凸轮型线具有较大的丰满系数。
ξ=∫2αB0h(α)dα2αBhmax
式中:hmax为凸轮的最大升程;ξ表示凸轮型线的丰满系数,其物理意义为高 次曲线和基本工作段包角所围的面积与最大升程和基本工作段包角所围面 积之比。它反映配气机构的气体通过能力,丰满系数大,进排气效率高,动力 性能好。对高次五项式方程推导,得丰满系数为
h(α)= C0+Cpβp+Cqβq+Crβr+Csβs
式中:h(α)表示气门升程,简写为hα;α表示凸轮转角,将基本段始点取作α= 0;β=(1-α/αB),α B为基本段半包角 ;C0,Cp,Cq,Cr,Cs表示待定系数;p,q,r,s表示幂 指数;取p= 2,q= 2n,r= 2n+ 2m,s=2n+ 4m,式中一般取n为3至20之间的实数;m 为1至20之间的实数。
MATLAB在摆动滚子从动件盘形凸轮机构设计中的应用

MATLAB在摆动滚子从动件盘形凸轮机构设计中的应用摘要:凸轮机构可以使从动件准确的实现某种预期的运动规律,它广泛的应用于自动机械、自动控制装置和装配生产线中。
本文将从凸轮机构的压力角及其基本尺寸的设计、从动件的运动规律、凸轮廓线的设计等方面介绍matlab在摆动滚子从动件盘形凸轮机构设计中的应用。
关键词:摆动滚子从动件盘形凸轮机构 matlabthe application of matlab in the oscillating roller follower disc cam mechanism designli hailong, luo fengming(southwest jiaotong university emei, le shan si chuan province ,614202)abstract:cam mechanism can make the follower accurately realize some expected movement which is widely used in automatic machinery, automatic control equipment and assembly production line. the article will introduce the application of matlab in the oscillating roller follower disc cam mechanism design from the pressure angle of cam and its basic size design, the motion law of the follower and cam profile design etc.key words: disk cam mechanism with oscillating roller follower;matlab1.问题的描述设计一个摆动滚子凸轮机构,要求导杆机构的最大压力角应为最小值;凸轮机构的最大压力角应在许用值[α]之内,摆动从动件的升、回程运动规律均为等加速等减速运动。
弹簧机构MATLAB凸轮代码
弹簧机构MATLAB凸轮代码下面是一个示例MATLAB 代码,可以用来模拟凸轮机构。
这段代码使用了凸轮机构的解析解,通过迭代解决方程来求解位置和速度。
首先,我们需要设置一些参数,包括凸轮机构的几何参数(如凸轮半径和齿数),以及模拟的时间步长和模拟的总时间。
clear;clc;% Set simulation parametersdt = 0.01; % time stept_total = 5; % total simulation time% Set mechanism parametersR = 1; % crank radiusr = 0.5; % follower radiusN = 20; % number of teeth然后,我们需要计算凸轮机构的解析解。
这可以通过迭代方程来实现,方程如下x_i+1 = x_i + dt*v_i+1v_i+1 = v_i + dt*a_i+1其中x_i 和v_i 分别表示第i 次迭代时凸轮机构的位置和速度,a_i 表示凸轮机构的加速度。
% Initialize position and velocityx = 0;v = 0;% Initialize timet = 0;% Initialize arrays to store position and velocity datax_data = [];v_data = [];% Iterate through timewhile t < t_total% Calculate accelerationa = (R - r)*sin(x) / (R*N);% Update position and velocityx = x + dt*v;v = v + dt*a;% Store datax_data = [x_data x];v_data = [v_data v];% Update timet = t + dt;end最后,我们可以使用MATLAB 的plot 函数绘制凸轮机构的位置和速度随时间的变化情况。
基于MATLAB的平行分度凸轮机构CAD算法和设计

图 1 平 行 分 度 凸 轮 机 构 运 动 简 图
* 稿 日期 :0 6 l — 1 收 2 0 1 3
作 者 简 介 : 岩 (9 9 ) 男 , 东安 丘 人 , 坊 学 院机 械 工 程 学 院讲 师 , 士 。 范 16 一 , 山 潍 硕
维普资讯
潍坊 学 院 学报
2 0 年 3月 07
对 于给定 的 机 构参 数 , 一 个 共 轭 凸轮 齿 对 每 应 的 圆心角是相 同的 。共 轭 圆弧齿 由位 于不 同平 面 上具 有相 同的 圆心角但 相位 角不 同 的两 段 圆弧
一
『+一 s 40 i) 2号i 兀 十 兀 n 1] (
。
为 凸轮 的角速 度 ;
∞ () 分度轮 的 角速度 为 e()为分度 轮 的角加 速度 ;
0 3 ̄ a c a 咄 sn r tn R i
 ̄ )( 3 一
)
() 6 () 7
按 上述公 式 在 MA AB 中编 制 程 序 , 算 TL 计
a 一 21 o 0
 ̄( i ̄ )+ ( -Rc s2 /Rs 2 - o ̄ ) n 一R
() 3
c一 『+一 s4 ] c 4丢i 兀 n ) ( s
一 ( i ( / ) + ( - Rc s  ̄ / ) 一R Rsn 2 ) d- o ( 2 )
[ c( 0] 1 o4 ) -s
平 行 分 度 凸 轮 机 构 是 一 种 间 歇 运 动 机
构E~ 】其机 构运 动简 图如 图 1 示 。该 凸轮 机 1 4, 所 构 与槽轮 机构 相 比具有 传动 平稳 和承 载能 力大 等 优点 , 值得 推 荐 使用 的 间歇 运 动 机 构 。平 行 分 是 度机 构 的运动 学分 析和设 计 是采用 类 似平 面 凸轮 机 构的方 法 , 基本 内容 是 凸 轮轮 廓 曲线 及 其 压 力 角、 曲率半 径 的计 算 。 由于计 算 机 和 数 控 机 床 的 广泛 应用 , 凸轮设 计 中 , 在 利用 计算 机算 出平 行 凸
matlab凸轮摇杆机构设计动画代码
matlab凸轮摇杆机构设计动画代码一、引言凸轮摇杆机构是机械工程中常见的一种机构,其运动特性决定了它在很多领域都有广泛的应用,例如发动机、汽车、船舶等。
而在设计凸轮摇杆机构时,需要进行大量的计算和试验,这对于工程师来说是一个非常繁琐的过程。
但是,通过使用MATLAB软件可以大大简化这个过程,并且可以生成动画效果来更直观地展示凸轮摇杆机构的运动特性。
二、MATLAB凸轮摇杆机构设计代码以下是MATLAB代码实现凸轮摇杆机构的动画效果:1. 定义凸轮形状首先需要定义凸轮的形状,可以采用圆弧、正弦曲线等方式进行定义。
例如,在此我们采用正弦曲线进行定义:```matlabtheta = linspace(0,2*pi,100);r = 1+sin(theta);```2. 定义摇杆长度和连杆长度根据具体情况定义摇杆长度和连杆长度:```matlabL1 = 3;L2 = 6;```3. 计算连杆末端位置坐标根据凸轮形状和连杆长度,可以计算出连杆末端的位置坐标:```matlabx1 = r.*cos(theta);y1 = r.*sin(theta);x2 = x1 + L1*cos(theta);y2 = y1 + L1*sin(theta);```4. 计算摇杆末端位置坐标根据连杆长度和摇杆长度,可以计算出摇杆末端的位置坐标:```matlabtheta2 = asin((y2-L2)./L1);x3 = x2 - L2*cos(theta-theta2);y3 = y2 - L2*sin(theta-theta2);```5. 绘制动画效果最后,使用MATLAB的plot函数绘制凸轮摇杆机构的动画效果:```matlabfor i=1:length(x3)plot([0,x2(i),x3(i)],[0,y2(i),y3(i)],'k-o','linewidth',4,'MarkerFaceColor','r','MarkerSize',10)axis equalpause(0.01)end```三、MATLAB凸轮摇杆机构设计代码详解1. 步骤一:定义凸轮形状在此我们采用正弦曲线进行定义。
基于MATLAB的凸轮机构运动分析与动画模拟
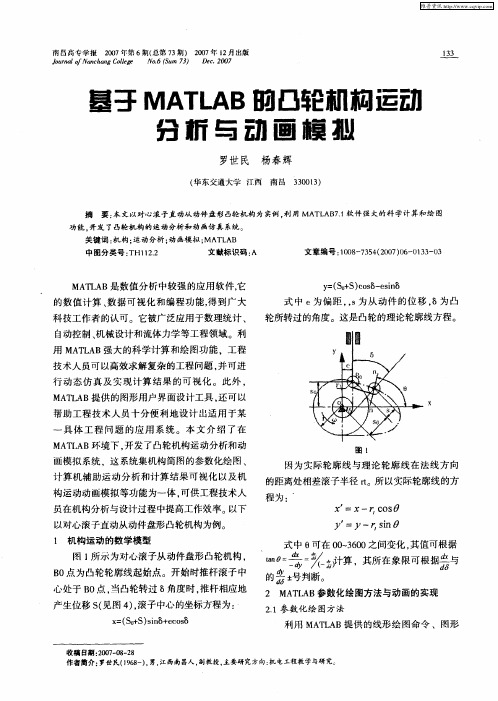
在 M TA A L B中 .用 户可采 用 两种 方 法来 制 作动 画 : 一种是 先 将 制作 的 图 片存储 起 来 , 后 然 按照播 放 电影 的方 式将 它们按顺 序播 放 出来 ( 称
电影 动 画) :另一 种是连 续 不断地 擦除并 重 画 图
l3 3
基Байду номын сангаас孑 MA L T AB硇 凸轮相构 运动 分 析 与 动 画 模 拟
罗世 民 杨 春辉
( 华东交通大学 汀两 南昌 30 1 ) 30 3
摘
要 : 文 以对 心 滚 子直 动从 动件 盘 形 凸轮 机 构 为 实例 , 用 MA A 71 件 强 大 的科 学 计 算和 绘 图 本 利 TL B . 软
功 能 . 发 了凸轮 机 构 的运 动 分 析和 动 画 仿 真 系统 。 开 关键 词 : 构 ; 动 分 析 ; 画模 拟 ; T A 机 运 动 MA L B
中图分类号 : H122 T 1.
文献标识码 : A
文章编号 :0 8 7 5 (07 0 一 1 3 O 10 — 3 4 20 )6 O 3一 3
形 中的更新对 象 。 得每 次重 画过 程都 是连 续 的 使 ( 称实 时动 画) 对 凸轮机 构的动画 可采用实 时动 。
画 。先 根据 实际轮 廓线方 程计算 出初 始 图形 , 然
后用 MA L B的矩 阵旋 转 功能 。连续 地 重 画更 TA 新 图形 。 凸轮匀 速转 动的 角速 度为 o ia 转 动 设 mg , 周数 为 I 1 .可采用 实 时动画 的方 法编 写 cm v a moe (,, ea mi ,) 函数 文件 , r td t, g n . r o a m 并在 此 函数 文件 中调用 位移 线图 函数文 件 。 将其存 入 MA L B 并 TA
基于Matlab的发动机配气凸轮机构的动力学建模与仿真

故应对其进行弹性动力学分析 ,将整个配气机构看作一个弹性 数 的增 多 , 计算工作量会大大增加 , 因此在建立 动力学模型时 ,
系统 , 研究气 门的实际输出随凸轮轴输入 的动态响应 , 可以为配 应该抓住 主要 的而忽略次要 的影响 因素 ,对 相关参数进行合理 气凸轮廓线 的运动, 动力学综合提供理论依据。 取舍 和简化 。 图 1a所示 , 如 () 是一个发动机配气凸轮机构系统 ,
Ke r :Va v a n e ha i m ;Dy m i i y wo ds lec l m c n s na c smul to a i n;M a l / i ul tab S m i nk
中图分类 号 :P 3 ,H12.文献标 识码 : T 19T 2 A
汽车发 动机配气机构的任务是保证气门在规定时刻开启或 关闭 , 开启或关闭应该 动作迅速 。随着 凸轮轴转速的提高 , 构件
t n i l utao glr ao V v l Tim to im r eatn f i t i wd y c t n n i y o i o a e a2hse hd oe xc adf c n o i e f u i ih h t nf l C l s l t . s e e. i
一
蔓 一蔓 — —套—套 —
—
蔓
— —
一 一 L — — —
蔓 — — — — 一
建立 了发动机 配气 凸轮机 构 的动 力 学数 学模 型 , 出 了运 用仿 真技 术对 凸轮 机 构进行 动 提
法, 绍 了在 snh k下的凸轮机 构仿 真过 程 。 过 实例得 出: 介 iun r 通 高速 情 况 下考 虑 系统元 件 的 弹性 变形 时 , 门的加 速 度响应 是 大幅波 动 。该 方 法具有 运 算 简便 、 气 精度 高、 速度 快等特 点 。
基于matlab凸轮轮廓设计

基于matlab凸轮轮廓设计随着科学技术的不断发展,凸轮轮廓设计已经被广泛运用于各种机械和动力学设备中。
MATLAB作为一种强大的技术软件,也被广泛用于凸轮轮廓的设计和分析。
本文将对基于MATLAB的凸轮轮廓设计进行探讨。
凸轮轮廓的设计需要考虑许多因素,如凸轮的形状、材质、运动方式等。
其中,凸轮轮廓的形状对凸轮的运动和性能起着至关重要的作用。
因此,凸轮轮廓的设计需要具有高度的精度和可靠性。
MATLAB作为一种功能强大的数学软件,可以通过编程实现凸轮轮廓的设计和分析。
MATLAB中有许多函数可以用于处理凸轮的相关问题,如curve fitting工具箱、symbolic math工具箱等。
通过这些工具箱和函数,可以实现凸轮轮廓的优化设计和模拟分析。
在凸轮轮廓的设计中,凸轮轨迹的生成是至关重要的一步。
传统的方法是通过手工绘制轮廓图,然后进行图形处理和数值计算等操作。
而在MATLAB中,可以利用数值计算和函数绘图等功能直接生成凸轮轮廓。
具体实现方法如下:首先,我们需要确定凸轮的基本参数,如凸轮的半径、角速度等。
然后,根据凸轮运动的规律,利用MATLAB中的数值计算函数计算出凸轮上各点的位置坐标。
接着,通过MATLAB中的函数绘图功能将各点连接形成凸轮轮廓。
最后,通过调整凸轮参数和轮廓图形,实现凸轮轮廓的优化设计。
除此之外,MATLAB还可以利用符号计算的功能优化凸轮轮廓设计。
通过定义凸轮的基本参数和轮廓方程,利用MATLAB中的符号计算工具求解优化方程,得到凸轮轮廓的最优设计方案。
综上所述,基于MATLAB的凸轮轮廓设计具有快速、精准、可靠等优势。
通过MATLAB的编程和工具箱的使用,可以实现凸轮轮廓的优化设计和模拟分析,为机械和动力学设备的设计和制造提供有力支持。
Engineer和MATLAB凸轮配气机构的运动仿真
Engineer和MATLAB凸轮配气机构的运动仿真作为一名工程师,MATLAB和凸轮配气机构的运动仿真是我工作中不可或缺的技能。
凸轮配气机构是用于控制内燃机气门开闭的重要装置,它通过凸轮的转动驱动汽缸内的柄杆并带动气门运动。
而运用MATLAB进行凸轮配气机构的运动仿真便可以更精确地模拟设备运动并进行性能优化。
我在MATLAB中设计了一个凸轮配气机构模型,并利用其中的模拟工具箱中的Simulink进行动态仿真。
我们首先将内燃机的气门开启和关闭的比例进行优化,保证了最高效的功率输出。
之后,我们使用MATLAB的曲线拟合工具箱来获得不同气门开启和关闭时刻的角度和位置信息。
通过这些数据,我们可以确定最佳的凸轮轮廓。
在为凸轮进行仿真测试之前,我们需要确保真实机器的物理参数已经定义。
MATLAB经典的自适应计算方法可以在相对较短的时间内对不同的凸轮设计进行运动仿真测试,这有助于我们快速地判断各种不同参数下的设计的优劣。
仿真测试呈现了凸轮的不同状态下内燃机气门的开启和关闭过程。
开关气门的时间可以根据我们需要进行调整。
在进行模拟运算时,我们可以模拟不同转速下的内燃机运动,并在不同负载下测试内燃机的动力性能,这使得我们能够以客观的角度评估不同的凸轮设计,并选择最佳设计方案。
我们也可以使用MATLAB来获得不同凸轮形状的旋转速度和运动惯性等信息,这有助于我们进行可靠的控制系统设计。
以及这方面的进一步研究将为制造商提供更高效和可靠的凸轮配气机构设计,从而提高工业内燃机的性能和可靠性。
总的来说,作为一名工程师,MATLAB和凸轮配气机构的运动仿真技能可以帮助我简化产品设计过程,并提供更准确和可靠的性能评估。
通过利用动态仿真,我可以以客观的方法评估各种设计,并选择最佳的方案。
我相信,这些技能将在工业界得到更广泛的重视和应用,为制造商带来更多的商业利益和竞争优势。
数据分析是工程师工作中非常重要的环节,它能够让我们更好地了解产品性能并发现其中的问题。
凸轮设计Matlab代码
凸轮设计Matlab代码%凸轮理论廓线与工作廓线的画法clear %清除变量r0=50; %定义基圆半径e=20; %定义偏距h=50; %推杆上升高度s0=sqrt(r0^2-e^2);r=10; %滚子半径%理论廓线a1=linspace(0,2*pi/3); % 推程阶段的自变量s1=h*(3*a1/2/pi-sin(3*a1)/2/pi); % 推杆产生的相应位移x1=-((s0+s1).*sin(a1)+e*cos(a1)); %x 函数y1=(s0+s1).*cos(a1)-e*sin(a1); %y 函数a2=linspace(0,pi/6); % 远休止阶段的自变量s2=50; %推杆位移x2=-((s0+s2).*sin(a2+2*pi/3)+e*cos(a2+2*pi/3)); %x 函数y2=(s0+s2).*cos(a2+2*pi/3)-e*sin(a2+2*pi/3); %y 函数a3=linspace(0,pi/3); % 回程阶段的自变量s3=h*(1+cos(3*a3))/2; % 推杆位移x3=-((s0+s3).*sin(a3+5*pi/6)+e*cos(a3+5*pi/6)); %x 函数y3=(s0+s3).*cos(a3+5*pi/6)-e*sin(a3+5*pi/6); %y 函数a4=linspace(0,5*pi/6); % 近休止阶段的自变量s4=0; %推杆位移x4=-((s0+s4).*sin(a4+7*pi/6)+e*cos(a4+7*pi/6)); %x 函数y4=(s0+s4).*cos(a4+7*pi/6)-e*sin(a4+7*pi/6); %y 函数a0=linspace(0,2*pi); % 基圆自变量x5=r0*cos(a0); %x 函数y5=r0*sin(a0); %y 函数%工作廓线m1=-(h*3/2/pi*(1-cos(3*a1))-e).*sin(a1)-(s0+s1).*cos(a1); % 中间变量 dx/d$n1=(h*3/2/pi*(1-cos(3*a1))-e).*cos(a1)-(s0+s1).*sin(a1); % 中间变量 dy/d$p1=-m1./sqrt(m1.^2+n1.^2); %sin&q1=n1./sqrt(m1.^2+n1.^2); %cos&x6=x1-r*q1; %x' 函数y6=y1-r*p1; %y' 函数m2=-(s0+s2).*cos(a2+2*pi/3)+e*sin(a2+2*pi/3); % 中间变量dx/d$n2=-(s0+s2).*sin(a2+2*pi/3)-e*cos(a2+2*pi/3); % 中间变量dy/d$p2=-m2./sqrt(m2.^2+n2.^2); %sin&q2=n2./sqrt(m2.^2+n2.^2); %cos&x7=x2-r*q2; %x' 函数y7=y2-r*p2; %y' 函数m3=(h*3/2*sin(3*a3)+e).*sin(a3+5*pi/6)-(s0+s3).*cos(a3+5*pi/6); % 中间变量 dx/d$n3=-(h*3/2*sin(3*a3)+e).*cos(a3+5*pi/6)-(s0+s3).*sin(a3+5*pi/6);% 中间变量 dy/d$p3=-m3./sqrt(m3.^2+n3.^2); %sin&q3=n3./sqrt(m3.^2+n3.^2); %cos&x8=x3-r*q3; %x' 函数y8=y3-r*p3; %y' 函数m4=-(s0+s4).*cos(a4+7*pi/6)+e*sin(a4+7*pi/6); %n4=-(s0+s4).*sin(a4+7*pi/6)-e*cos(a4+7*pi/6); %p4=-m4./sqrt(m4.^2+n4.^2); %sin&q4=n4./sqrt(m4.^2+n4.^2); %cos&x9=x4-r*q4; %x' 函数y9=y4-r*p4; %y' 函数%画滚子g1=x1(1)+r*cos(a0);j1=y1(1)+r*sin(a0);g2=x1(25)+r*cos(a0);j2=y1(25)+r*sin(a0);g3=x1(50)+r*cos(a0);j3=y1(50)+r*sin(a0);g4=x1(60)+r*cos(a0);j4=y1(60)+r*sin(a0);g5=x1(75)+r*cos(a0);j5=y1(75)+r*sin(a0);g6=x1(90)+r*cos(a0);j6=y1(90)+r*sin(a0);g7=x2(1)+r*cos(a0);j7=y2(1)+r*sin(a0);g8=x2(50)+r*cos(a0);j8=y2(50)+r*sin(a0);g9=x3(1)+r*cos(a0);j9=y3(1)+r*sin(a0);g10=x3(25)+r*cos(a0);j10=y3(25)+r*sin(a0);g11=x3(40)+r*cos(a0);j11=y3(40)+r*sin(a0);g12=x3(50)+r*cos(a0); %中间变量 dx/d$ 中间变量 dy/d$j12=y3(50)+r*sin(a0);g13=x3(75)+r*cos(a0);j13=y3(75)+r*sin(a0); g14=x4(1)+r*cos(a0); j14=y4(1)+r*sin(a0);g15=x4(50)+r*cos(a0);j15=y4(50)+r*sin(a0);figure %创建图形窗口plot(x1,y1,'b-',x2,y2,'g-',x3,y3,'m-',x4,y4,'c-',...x6,y6,'b-',x7,y7,'g-',x8,y8,'m-',x9,y9,'c-',...'LineWidth',2) % 画函数曲线grid on %加网格hold on %保持图像plot(x5,y5,'r--',g1,j1,'k-',g2,j2,'k-',g3,j3,'k-',...g4,j4,'k-',g5,j5,'k-',g6,j6,'k-',g7,j7,'k-',...g8,j8,'k-',g9,j9,'k-',g10,j10,'k-',g11,j11,'k-',...g12,j12,'k-',g13,j13,'k-',g14,j14,'k-',g15,j15,'k-','LineWidth',2) % 画基圆 title(' 凸轮理论廓线与工作廓线 ','FontSize',16) %标题axis ([-100,80,-120,60])axis('equal')points=[x6',y6',zeros(100,1);x7',y7',zeros(100,1);...x8',y8',zeros(100,1);x9',y9',zeros(100,1)]。
基于MATLAB的凸轮设计

中国地质大学(武汉)1.凸轮要求=10mm,凸轮以等角设计一对心直动滚子推杆盘形凸轮机构,滚子半径rr速度逆时针回转。
凸轮转角=0~120 时,推杆等速上升20mm;=120~180 时,推杆远休止;=180~270时,推杆等加速等减速下降20mm;=270~360时,推杆近休止。
要求推程的最大压力角<=30,试选取合适的基圆半径,并绘制凸轮的廓线。
问此凸轮是否有缺陷,应如何补救。
2.列出凸轮运动方程0<<2/32/3<<2/3<<3. 由方程写MATLAB源程序%1.已知参数clear;r0=50; %基圆半径rr=10; %滚子半径h=20; %行程delta01=120;%推程运动角delta02=60; % 远休角delta03=90;%回程运动角hd=pi/180;du=180/pi;n1=delta01+delta02;n2=delta01+delta02+delta03;%2凸轮曲线设计n=360;for i=1:360%计算推杆运动规律if i<=delta01s(i)=30/pi*(i*hd);ds(i)=30/pi;ds=ds(i);elseif i>delta01 && i<=n1;s(i)=h;ds(i)=0;ds=ds(i);elseif i>n1 && i<=(n1+delta03/2)s(i)=-140+320/pi*(i*hd)-160/pi^2*(i*hd)^2; ds(i)=320/pi-320/pi^2*(i*hd);ds=ds(i);elseif i>(n1+delta03/2) && i<=n2s(i)=360-480/pi*(i*hd)+160/pi^2*(i*hd)^2;ds(i)=-480/pi+320/pi^2*(i*hd);ds=ds(i);elseif i>n2 && i<=ns(i)=0;ds=0;end%计算凸轮轨迹曲线xx(i)=(r0+s(i))*sin(i*hd);%计算理论轮廓曲线yy(i)=(r0+s(i))*cos(i*hd);dx(i)=ds*sin(i*hd)+(r0+s(i))*cos(i*hd);%计算导数 dy(i)=ds*cos(i*hd)-(r0+s(i))*sin(i*hd);xp(i)=xx(i)+rr*dy(i)/sqrt(dx(i)^2+dy(i)^2);yp(i)=yy(i)-rr*dx(i)/sqrt(dx(i)^2+dy(i)^2);end%3.输出凸轮轮廓曲线figure(1);hold on;grid on;axis equal;axis([-(r0+h-30) (r0+h+10) -(r0+h+10) (r0+rr+10)]);text(r0+h+3,4,'X');text(3,r0+rr+3,'Y');text(-6,4,'O');title('对心直动滚子推杆盘形凸轮设计');xlabel('x/mm');ylabel('y/mm');plot([-(r0+h-40) (r0+h)],[0 0],'k');plot([0 0],[-(r0+h) (r0+rr)],'k');plot(xx,yy,'r--');%»绘凸轮实际轮廓曲线ct=linspace(0,2*pi);plot(r0*cos(ct),r0*sin(ct),'g');%绘凸轮基圆plot(rr*cos(ct),r0+rr*sin(ct),'k');%绘滚子圆plot(0,r0,'o');%滚子圆中心plot([0 0],[r0 r0+30],'k');plot(xp,yp,'b'); %绘凸轮实际轮廓曲线%4. 凸轮机构运动仿真%计算凸轮滚子转角xp0=0;yp0=r0-rr;dss=sqrt(diff(xp).^2+diff(yp).^2);%对轮廓曲线进行差分计算ss(1)=sqrt((xp(1)-xp0)^2+(xp(1)-yp0)^2);%轮廓曲线第一点长度for i=1:359ss(i+1)=ss(i)+dss(i);%计算实际廓曲线长度endphi=ss/rr;%计算滚子转角%运动仿真开始figure(2);m=moviein(20);j=0;for i=1:360j=j+1;delta(i)=i*hd;%凸轮转角xy=[xp',yp'];%凸轮实际轮廓曲线坐标A1=[cos(delta(i)),sin(delta(i));%凸轮坐标旋转矩阵-sin(delta(i)),cos(delta(i))];xy=xy*A1;%旋转后实际凸轮曲线坐标clf;%绘凸轮plot(xy(:,1),xy(:,2));hold on;axis equal;axis([-(120) (470) -(100) (140)]);plot([-(r0+h-40) (r0+h)],[0],'k');%绘凸轮水平轴plot([0 0],[-(r0+h) (r0+rr)],'k');%绘凸轮垂直轴plot(r0*cos(ct),r0*sin(ct),'g');%绘基圆plot(rr*cos(ct),r0+s(i)+rr*sin(ct),'k');绘滚子圆plot([0 rr*cos(-phi(i))],[r0+s(i) r0+s(i)+rr*sin(-phi(i))],'k');% 绘滚子圆标线plot([0 0],[r0+s(i) r0+s(i)+40],'k');%绘推杆%绘推杆曲线plot([1:360]+r0+h,s+r0);plot([(r0+h) (r0+h+360)],[r0 r0],'k');plot([(r0+h) (r0+h)],[r0 r0+h],'k');plot(i+r0+h,s(i)+r0,'*');title('对心直动滚子推杆盘形凸轮设计');xlabel('x/mm');ylable('y/mm');m(j)=getframe;endmovie(m);4.运动仿真结果在MATLAB中可以看出轮廓曲线有一处缺口。
凸轮
X1=(s0+s).*cos(x)-e.*sin(x); Y1=(s0+s).*sin(x)+e.*cos(x); %实际轮廓 X11=X1-(rr.*(cos(x).*(s + s0) e.*sin(x)))./((sin(x).*(s + s0) + e.*cos(x)).^2 + (cos(x).*(s + s0) - e.*sin(x)).^2).^(1./2); Y11=Y1-(rr.*(sin(x).*(s + s0) + e.*cos(x)))./((sin(x).*(s + s0) + e.*cos(x)).^2 + (cos(x).*(s + s0) - e.*sin(x)).^2).^(1./2); plot(X1,Y1,'r',X11,Y11,'r'),hold on; %远休 x=150.*pi/180:pi/200:200.*pi/180; s=50; X2=(s0+s).*cos(x)-e.*sin(x); Y2=(s0+s).*sin(x)+e.*cos(x); X22=X2-(rr.*(cos(x).*(s + s0) e.*sin(x)))./((sin(x).*(s + s0) + e.*cos(x)).^2 + (cos(x).*(s + s0) - e.*sin(x)).^2).^(1./2); Y22=Y2-(rr.*(sin(x).*(s + s0) + e.*cos(x)))./((sin(x).*(s + s0) + e.*cos(x)).^2 + (cos(x).*(s + s0) - e.*sin(x)).^2).^(1./2); plot(X2,Y2,'g',X22,Y22,'g'),hold on; %回程
基于matlab配气凸轮接触应力计算

基于matlab配气凸轮接触应力计算引言:随着汽车工业的发展,配气系统在引擎中起着至关重要的作用。
而凸轮是配气系统中最核心的零件之一、为了确保凸轮在长期运行中的可靠性和稳定性,需要对其接触应力进行计算和分析。
本文将介绍如何使用Matlab计算配气凸轮的接触应力。
一、凸轮接触应力的计算原理在计算凸轮接触应力之前,需要考虑以下几个关键因素:凸轮材料的应力-应变关系、凸轮与其他运动部件之间的相对运动、载荷作用下的接触区域形状等。
凸轮的接触应力可以通过以下公式计算得到:σ=P/A其中,σ是接触应力,P是载荷,A是接触面积。
接下来,我们将详细介绍如何使用Matlab进行凸轮接触应力的计算。
二、凸轮接触应力的Matlab代码实现首先,我们需要定义凸轮的载荷和接触面积。
其中载荷可以通过力学分析得到,而接触面积则需要根据凸轮与其他零件的实际形状进行计算。
1.载荷的计算通过力学分析,可以得到凸轮承受的载荷。
比如,如果凸轮用于压缩发动机的汽缸,载荷可以通过气缸压力和活塞直径等参数计算得到。
2.接触面积的计算接触面积的计算需要根据凸轮和其他运动部件的实际形状进行。
这通常需要使用CAD软件,并将凸轮模型导入到Matlab中进行后续处理。
可以使用Matlab的CAD工具箱或第三方库来实现凸轮模型导入和处理。
3.接触应力的计算在得到载荷和接触面积之后,可以使用上述公式计算凸轮的接触应力。
在Matlab中,可以使用矩阵运算和元素运算来实现该计算。
4.结果的可视化和分析计算得到的接触应力可以通过Matlab的绘图功能进行可视化和分析。
可以绘制应力与时间的曲线,或者在凸轮模型上标记出不同区域的应力水平。
三、案例分析为了更好地说明利用Matlab进行配气凸轮接触应力的计算,我们举一个简单的案例。
假设有一个凸轮用于压缩发动机的汽缸,载荷为1000N,接触面积为0.05平方米。
首先,我们定义载荷和接触面积:P=1000;%载荷,单位:NA=0.05;%接触面积,单位:平方米然后,根据上述公式计算接触应力:sigma = P / A; % 接触应力最后,我们可以通过绘图将结果可视化:t=0:0.01:10;%时间范围stress = sigma * ones(size(t)); % 应力曲线plot(t, stress);xlabel('时间');ylabel('接触应力');title('凸轮接触应力');grid on;四、总结本文介绍了如何使用Matlab计算配气凸轮的接触应力。
基于MATLAB软件的印刷机高点闭牙共轭凸轮机构

Dein o o j g t a frOp ncoeGrp e s fC nu aeC m e -ls ip r g o
M e ha s o e sBa e n M ATLAB c nim f Pr s s d o
L OU e — i g , W iq n CHENG n ・ u ZHAO n —e Ga g h , Mi g li
边缘, 只在老式胶 印机上才 能见到。高点闭牙机构 因
其特有 的技术优 势在 现代 单 张纸 印刷 机 上 广泛 应 用 。
t h o gcl da t e. e g am d a i ojg t cm di ,h rc e ace i eg p rah gvst e nl i vna s B i i e t t cn a a r e ti at l r er s t ds n apo c , i h c o aa g n s u e v s ie s h s i e e
副凸轮分别安装在印刷机两墙板 内侧 , 并且 固定在墙
板上 不转动 , 子及摆 杆从 动件 随着滚筒 传动 而运 动 ; 滚
②由于完成闭牙和开牙动作时间短 , 即滚子从凸轮低
面运 动到高 面和滚子从 凸轮高面 运动 到低 面所用 的时
间很短 , 以 主 副 凸轮 的升 程 和 回程 曲线 都 比较 短 。 所
K yw r shg p t l e —r p r eh ns cnu a a MA L B sf ae e od :ihso co dgi e ca i s p m m;ojgt cm; T A ot r e w
。 。
1 问题 的提 出
响开闭牙机构的性能
凸轮 由于其各方面良好的
d sg a c re v l ae pe s r n l n n ls c a i moin ae n stn aa tr. ein c m u v ,ai t rsu ea gea d a ay eme h ns d m t sb sd o et g p rmees o i
基于MATLAB的平面凸轮机构通用凸轮曲线设计

短 时间 、最 圆滑 、无 振 动 、耗 能 少 的方 式 来驱 动 从 动 (推程 ),所 设计 的从 动件 运动 曲线 。通 用 凸轮 曲线 件 。现有许 多种 类 的凸轮 曲线 ,这些 凸 轮 曲线 不 仅 的构造 和方程 ,如 图 1所 示 。通 用 凸轮 曲线 加 速度
是 在凸轮上使用 ,对其 他运动也适 用 。
全 区域 中连续 。
sl _一一 ./
,
/
. —
订
d l 厂 ‘、. } ‘、 1 一一
。 ,
、、
};
\ .
. 口 ./‘
, ,
2009年 1O月 15 日收 到 第一作者简介 :吴 卓(1963一 ),女 ,黑龙江富裕人 ,兰州理 工大学 教 授 ,硕 士 ,研 究方 向 :机 械 CAD ,现代 设 计 理论 及 方 法 。
区间 V <T< , =一‰ 1T( 一
一 );
区间VI 《 , = 一口 ;
区间Ⅶ <T<<T7, :amm c0s ̄r(T- )/2( 一瓦)。 上式 中 对时 间 顺次 积分 ,可得 和 s。为使 边界 条件 连 续 ,设 在 T:ro时 ,V=Vo,S=S。;在 T=
matlab凸轮课程设计
matlab 凸轮课程设计一、教学目标本课程旨在通过MATLAB软件仿真,使学生掌握凸轮机构的基本原理和设计方法,提高学生运用数学模型解决工程实际问题的能力。
具体目标如下:1.知识目标:使学生了解凸轮机构的基本概念、类型和运动特性,掌握常用凸轮机构的运动规律和设计方法,理解MATLAB在凸轮设计中的应用。
2.技能目标:培养学生运用MATLAB进行凸轮机构仿真分析的能力,能够独立完成凸轮机构的运动规律分析、参数优化和设计。
3.情感态度价值观目标:培养学生对机械设计的兴趣,增强工程实践能力和创新意识,树立团队协作和终身学习的观念。
二、教学内容本课程的教学内容主要包括以下几个部分:1.凸轮机构的基本概念、类型和运动特性。
2.常用凸轮机构的运动规律和设计方法。
3.MATLAB在凸轮设计中的应用,包括凸轮机构的运动规律分析、参数优化和设计。
教学大纲安排如下:第1-2课时:凸轮机构的基本概念、类型和运动特性。
第3-4课时:常用凸轮机构的运动规律和设计方法。
第5-6课时:MATLAB在凸轮设计中的应用。
三、教学方法为了提高教学效果,本课程将采用多种教学方法相结合的方式,包括:1.讲授法:用于讲解凸轮机构的基本概念、类型和运动特性,以及常用凸轮机构的运动规律和设计方法。
2.案例分析法:通过分析实际案例,使学生更好地理解凸轮机构的设计和应用。
3.实验法:引导学生利用MATLAB软件进行凸轮机构的仿真实验,提高学生的实践操作能力。
四、教学资源为了支持本课程的教学,将准备以下教学资源:1.教材:《MATLAB凸轮设计教程》。
2.参考书:相关领域内的学术论文、专著等。
3.多媒体资料:课件、教学视频等。
4.实验设备:计算机、MATLAB软件等。
通过以上教学资源的支持,为学生提供丰富多样的学习体验,提高教学质量。
五、教学评估本课程的教学评估将采用多元化的评价方式,以全面、客观、公正地评估学生的学习成果。
评估方式包括:1.平时表现:通过课堂参与、提问、小组讨论等环节,评估学生的学习态度和课堂表现。
基于MATLAB的凸轮机构设计

基于MATLAB的凸轮机构设计
郭仁生
【期刊名称】《顺德职业技术学院学报》
【年(卷),期】2005(003)001
【摘要】描述了基于MATLAB进行凸轮机构设计的数学模型和工作流程,说明了编制文件适用的主要函数和命令及系统实现需注意的4个主要问题.给出了某偏置移动从动件盘形凸轮机构的设计实例.
【总页数】3页(P20-22)
【作者】郭仁生
【作者单位】佛山职业技术学院二分院,广东,佛山,528000
【正文语种】中文
【中图分类】TH132.47
【相关文献】
1.基于Matlab和ADAMS的共轭凸轮下摆式递纸机构的设计 [J], 李晓腾;傅燕鸣;周暄妍
2.基于MATLAB和Creo的平行分度凸轮机构的设计 [J], 蔡玉强;姚佳
3.基于MATLAB凸轮机构的可靠性设计 [J], 张敬东;郭小兰;龙懿涛;汪凯丽
4.基于MATLAB的凸轮机构的优化设计 [J], 张敬东;姚杰;起雪梅;陈显强;吴生文
5.基于MATLAB的平面凸轮机构通用凸轮曲线设计 [J], 吴卓;徐伟;刘广利
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
凸轮轮廓程序:>> e=20;s0=77.46;a1=0:pi/36:pi/3;s1=50*[3*a1/pi-sin(6*a1)/(2*pi)];x1=(s0+s1).*sin(a1)+e*cos(a1);y1=(s0+s1).*cos(a1)-e*sin(a1);k1=150/pi*[1-cos(6*a1)];>> i仁[(k1-e).*si n( a1)+(sO+s1).*cos(a1)].*[(k1-e).*(k1-e)+(sO+s1).*(sO+s1)]A(-1/2);>> j1=[-(k1-e).*cos(a1)+(s0+s1).*si n( a1)].*[(k1-e).*(k1-e)+(s0+s1).*(s0+s1)].^(-1/2); >> x1O=x1-1O*j1;>> y10=y1-10*i1;a2=pi/3:pi/36:pi;s2=50;x2=(s0+s2).*sin(a2)+e*cos(a2);y2=(s0+s2).*cos(a2)-e*sin(a2);k2=0;>> i2=[(k2-e).*si n( a2)+(s0+s2).*cos(a2)].*[(k2-e).*(k2-e)+(s0+s2).*(s0+s2)]A(-1/2);j2=[-(k2-e).*cos(a2)+(s0+s2).*si n( a2)].*[(k2-e).*(k2-e)+(s0+s2).*(s0+s2)].A(-1/2); x20=x2-10*j2;y20=y2-10*i2;>> a3=pi:pi/36:4*pi/3;>> s3=50*[1-3*(a3-pi)/pi+sin(6*(a3-pi))/(2*pi)];>> x3=(s0+s3).*sin(a3)+e*cos(a3);>> y3=(s0+s3).*cos(a3)-e*sin(a3);>> k3=50*[-3/pi+3/pi*cos(6*(a3-pi))];>> i3=[(k3-e).*si n( a3)+(s0+s3).*cos(a3)].*[(k3-e).*(k3-e)+(s0+s3).*(s0+s3)].A(-1/2);>> j3=[-(k3-e).*cos(a3)+(s0+s3).*si n( a3)].*[(k3-e).*(k3-e)+(s0+s3).*(s0+s3)].A(-1/2); >> x30=x3-10*j3;>> y30=y3-10*i3;>> a4=4*pi/3:pi/36:2*pi;>> s4=0;>> x4=(s0+s4).*sin(a4)+e*cos(a4);>> y4=(s0+s4).*cos(a4)-e*sin(a4);>> k4=0;>> i4=[(k4-e).*si n( a4)+(s0+s4).*cos(a4)].*[(k4-e).*(k4-e)+(s0+s4).*(s0+s4)].A(-1/2);>> j4=[-(k4-e).*cos(a4)+(s0+s4).*si n( a4)].*[(k4-e).*(k4-e)+(s0+s4).*(s0+s4)].A(-1/2); >> x40=x4-10*j4;>> y40=y4-10*i4;>> plot(x10,y10,'-g*',x20,y20,'-r*',x30,y30,'-b*',x40,y40,'-k*')>> plot(x10,y10,'-g*',x20,y20,'-r*',x30,y30,'-b*',x40,y40,'-k*',x1,y1,'-g*',x2,y2,'-r*',x3,y3,'-b*',x4,y4,'-k*')>>凸轮压力角:>> x=0:0.01: pi/3;>> t=5.76*si n(6*x)+6*x.*si n(6*x)+(2-2* pi/15)*cos(6*x)-2+2* pi/15;>> xColu mns 1 through 60 0.0100 0.0200 0.0300 0.0400 0.0500Colu mns 7 through 120.0600 0.0700 0.0800 0.0900 0.1000 0.1100Colu mns 13 through 180.1200 0.1300 0.1400 0.1500 0.1600 0.1700 Columns 19 through 240.1800 0.1900 0.2000 0.2100 0.2200 0.2300 Columns 25 through 300.2400 0.2500 0.2600 0.2700 0.2800 0.2900 Columns 31 through 360.3000 0.3100 0.3200 0.3300 0.3400 0.3500 Columns 37 through 420.3600 0.3700 0.3800 0.3900 0.4000 0.4100 Columns 43 through 480.4200 0.4300 0.4400 0.4500 0.4600 0.4700 Columns 49 through 540.4800 0.4900 0.5000 0.5100 0.5200 0.5300 Columns 55 through 600.5400 0.5500 0.5600 0.5700 0.5800 0.5900 Columns 61 through 660.6000 0.6100 0.6200 0.6300 0.6400 0.6500 Columns 67 through 720.6600 0.6700 0.6800 0.6900 0.7000 0.7100 Columns 73 through 780.7200 0.7300 0.7400 0.7500 0.7600 0.7700 Columns 79 through 840.7800 0.7900 0.8000 0.8100 0.8200 0.8300Columns 85 through 900.8400 0.8500 0.8600 0.8700 0.8800 0.8900Columns 91 through 960.9000 0.9100 0.9200 0.9300 0.9400 0.9500Columns 97 through 1020.9600 0.9700 0.9800 0.9900 1.0000 1.0100Columns 103 through 1051.0200 1.0300 1.0400>> tColumns 1 through 60.0000 0.3461 0.6925 1.0379 1.3809 1.7202Columns 7 through 122.0546 2.3825 2.70283.0141 3.3150 3.6042Columns 13 through 183.88044.1424 4.3889 4.6187 4.83075.0237Columns 19 through 245.1967 5.3487 5.4788 5.5861 5.6698 5.72925.7636 5.7725 5.7555 5.7122 5.6422 5.5455Columns 25 through 30Columns 31 through 365.4219 5.2715 5.0944 4.8908 4.6610 4.4055 Columns 37 through 424.1248 3.8196 3.4906 3.1387 2.7647 2.3699 Columns 43 through 481.9552 1.5219 1.0714 0.6051 0.1243 -0.3692 Columns 49 through 54-0.8740 -1.3882 -1.9102 -2.4381 -2.9701 -3.5044 Columns 55 through 60-4.0388 -4.5716 -5.1008 -5.6243 -6.1401 -6.6464 Columns 61 through 66-7.1410 -7.6221 -8.0877 -8.5359 -8.9648 -9.3727 Columns 67 through 72-9.7578 -10.1184 -10.4528 -10.7596 -11.0372 -11.2843 Columns 73 through 78-11.4996 -11.6820 -11.8304 -11.9439 -12.0215 -12.0627 Columns 79 through 84-12.0668 -12.0335 -11.9623 -11.8531 -11.7059 -11.5207 Columns 85 through 90-11.2979 -11.0378 -10.7410 -10.4081 -10.0399 -9.6374-9.2016 -8.7339 -8.2356 -7.7081 -7.1530 -6.5722 Columns 91 through 96Columns 97 through 102x =Columns 1 through 6Columns 7 through 11-5.9674 -5.3405 -4.6937 -4.0291 -3.3489 -2.6554Columns 103 through 105-1.9511 -1.2383 -0.5195 >> x=0.46:0.001:0.47;>> t=5.76*sin(6*x)+6*x.*sin(6*x)+(2-2*pi/15)*cos(6*x)-2+2*pi/15; >> xColumns 1 through 6Columns 7 through 11>> tColumns 1 through 6Columns 7 through 11>> x=0.462:0.0001:0.463;>> t=5.76*sin(6*x)+6*x.*sin(6*x)+(2-2*pi/15)*cos(6*x)-2+2*pi/15; >> x0.4620 0.4621 0.4622 0.4623 0.4624 0.46250.46000.4610 0.4620 0.4630 0.4640 0.46500.46600.4670 0.4680 0.4690 0.47000.12430.0755 0.0266 -0.0225 -0.0717 -0.1210-0.1704 -0.2199-0.2696 -0.3193 -0.36920.4626 0.4627 0.4628 0.4629 0.4630>> tColumns 1 through 60.0266 0.0217 0.0168 0.0119 0.0070 0.0021Columns 7 through 11-0.0028 -0.0077 -0.0126 -0.0176 -0.0225>> z=[0 0.4625];>> y=[150/pi*(1-cos(6*z))-20].*[45.8+50*(3*z/pi-sin(6*z)/(2*pi))];>> y=[150/pi*(1-cos(6*z))-20]./[45.8+50*(3*z/pi-sin(6*z)/(2*pi))];>> y-0.4367 1.1121>> a=atan(y)-0.4117 0.8384>> a*180/pians =-23.5900 48.0382>>以上是计算推程压力角的临界值。