FANUC工业机器人焊接工作站课程资源开发(论文)
弧焊机器人工作站系统设计毕业论文
弧焊机器人工作站系统设计摘要随着工业技术的提高,机器人被广泛应用于生产实践中,机器人与手工操作相比,有着明显的优势,广泛采用工业机器人不仅可提高产品的质量和产量,而且对保障人身安全,改善劳动环境,减轻劳动强度,提高劳动生产率,节约原材料消耗以及降低生产成本,有着十分重要的意义。
和计算机、网络技术一样,工业机器人的广泛应用日益改变人类的生产生活。
其中,焊接机器人是应用最为广泛的机器人,全球将近一半的工业机器人用于各种形式的焊接加工领域。
本论文以六自由度弧焊机器人为背景,详细介绍了机器人工作站的配置,硬件选型,PLC控制系统的设计、机器人配套设施的建设、仿真软件的应用及在实际环境中的调试。
论文首先总结了前人的工作,对焊接机器人工作站的发展现状和前景进行了展望。
总结了中外弧焊机器人的生产发展情况,对国内的弧焊机器人工作站的优缺点进行了分析。
然后结合工厂实际情况和生产要求,结合目前先进的机器人技术和解决方案,规划了本次机器人工作站的设计模块,对机器人工作站的配置和组成提出了合理创新的设计,采用简单高效的方法完成了工厂的应用要求。
工作站包括两台日本安川机器人公司的MOTOMAN NX100机器人,该机器人采用了6轴运动,能够在空间上做大自由度的运动,一台机器人安装了弧焊焊枪,进行弧焊作业,另一台机器人安装了夹持设备,进行辅助作业,两台机器人协调工作,共同完成作业任务。
本文对工作站的各个组成部分给出合适的规划,保证了机器人工作站的实用高效性,使用双机器人的协调工作及外部轴的控制实现高复杂度的焊接,能够适应不同的工作环境,使工作站拥有良好的柔性化拓展空间。
对工作站系统进行设计时采用了先进的3D模拟仿真技术,能够直观模拟机器人在实际工作环境下的运动状态,观察机器人I/O信号在运行中的应用情况,对现场环境下工作站的系统运行作出充分的模拟演示,保障了机器人工作站的稳定和高效,为机器人工作站的现场搭置提供了精确的数据支持。
机器人焊接实践教学(3篇)

第1篇摘要随着工业自动化技术的不断发展,机器人焊接技术在我国制造业中得到了广泛应用。
为了培养适应新时代需求的焊接技术人才,本文以机器人焊接实践教学为核心,从实践教学的意义、教学内容、教学方法、实践环节等方面进行探讨,旨在提高焊接专业学生的实践能力,为我国焊接事业的发展提供人才保障。
一、引言焊接技术是制造业中的关键技术之一,机器人焊接作为一种新兴的焊接技术,具有自动化程度高、焊接质量稳定、生产效率高等优点。
随着我国制造业的快速发展,对机器人焊接技术人才的需求日益增加。
因此,开展机器人焊接实践教学,对于提高焊接专业学生的实践能力、培养适应新时代需求的焊接技术人才具有重要意义。
二、实践教学的意义1. 提高学生的实践能力:机器人焊接实践教学使学生能够在实际操作中掌握焊接技术,提高动手能力。
2. 培养学生的创新意识:通过实践,学生可以了解焊接技术的发展趋势,激发创新思维。
3. 增强学生的就业竞争力:掌握机器人焊接技术的学生,在求职过程中具有更强的竞争力。
4. 促进焊接技术的发展:实践教学可以为企业培养更多优秀的焊接技术人才,推动焊接技术的发展。
三、教学内容1. 机器人焊接基础知识:介绍机器人焊接的基本原理、焊接工艺、焊接设备等。
2. 机器人焊接编程与控制:学习机器人焊接编程语言、编程方法、焊接参数调整等。
3. 机器人焊接设备操作与维护:掌握机器人焊接设备的操作方法、维护保养知识。
4. 机器人焊接应用实例:分析机器人焊接在汽车、航空航天、船舶制造等领域的应用案例。
5. 机器人焊接安全与环保:了解焊接过程中的安全操作规程、环保措施。
四、教学方法1. 理论与实践相结合:在理论教学过程中,结合实际操作进行讲解,提高学生的实践能力。
2. 案例分析法:通过分析典型案例,使学生了解机器人焊接技术的实际应用。
3. 分组讨论法:将学生分组,针对实际问题进行讨论,培养学生的团队协作能力。
4. 实训室教学:在实训室进行机器人焊接操作,让学生亲身体验焊接过程。
关于焊接机器人工作站设计的探究
关于焊接机器人工作站设计的探究发表时间:2017-07-12T15:08:55.550Z 来源:《基层建设》2017年第8期作者:刘阿缔[导读] 本论文通过对焊接机器人工作站的设计与实现,将工业机器人、点焊控制器、夹具、安全门及周边设备连接起来,实现相互通讯。
佛山市南海力丰机床有限公司 528241摘要:本论文通过对焊接机器人工作站的设计与实现,将工业机器人、点焊控制器、夹具、安全门及周边设备连接起来,实现相互通讯,达到两个机器人同时独立操作和协同操作目的,构成焊接机器人工作站;通过PROFIBUS总线,实现PLC控制,结合触摸屏技术开发人机界面实现监控;进行工作站的机器人参数设定、坐标系选取及机器人运动程序设计,通过配置I/O信号,实现机器人外部控制。
关键词:焊接机器人;工作中;设计引言工作站具有搬运车门、自动换钳焊接、焊钳修磨等功能,特别注重安全防护系统的配置。
解决机器人控制器与周边设备接口技术,实现PLC控制柜与点焊控制器的通讯,点焊控制器与机器人以及快换装置的电气设计。
进行机器人控制器与外围设备连接,机器人控制器通过西门子集成通讯处理模块CP5614与PLC控制柜内的可编程序控制器S7-300PLC进行通讯。
PLC通过本地I/O和外围分布式I/O采集夹具、周边及机器人信号,以使系统能顺利地完成预定的各项工作。
整个系统采用PROFIBUS网络联接,工作站的夹具、气压开关、安全门开关、抓具、焊钳及保护罩、光栅、光幕和操作台(带有10.4寸西门子TP270-10型号触摸屏)等信号分别通过线缆连接到相应控制箱内,整个工作站由PLC进行控制。
1工作站结构方案设计焊接机器人工作站组成:(1)两台德国库卡公司生产的KUKA-KR200/4点焊机器人控制器(KRC,即 KUKA Robot Controller,200kg 负载,最大工作半径为 2400mm)和两台本体操作机。
机器人选型采用德系车生产企业普遍采用的机器人型号,搭建企业真实的工作环境;(2)一台日本小原南京公司生产的 ST21 型点焊控制器(Timer)用来控制点焊操作,根据加工工件的不同进行电焊电流的设定;(3)一台焊钳修磨器,当焊钳电极头氧化后需要自动进行修磨;(4)一套日本NITTA公司生产的快换装置及X钳和C钳的保护罩各一套,快换装置实现焊钳的置换,焊钳保护罩用来保护焊钳,防止焊接过程中飞溅对焊钳损伤;(5)一台冷水机和一台空气压缩机,冷水机用来冷却焊钳,空气压缩机为整个工作站供气;(6)一台周边控制柜(内有SIMATIC的S7-300系列PLC)、ET200S分布式I/O,是整个控制系统指挥中心,当机器人处于外部控制时,由PLC发布指令;(7)一台带有触摸屏(SIMATIC TP270-10)的操作台,用于检测系统状态;(8)一套水气单元系统(内装有电气比例阀、流量计、手动排水阀等),用来检测工作站水、其是否准备好,并符合要求;(9)上料台、下料台、JIG A和JIG B及其它附属周边设备;(10)安全光栅及安全门,作为系统重要的安全防护。
2024版FANUC焊接机器人编程全部课程

2024/1/27
机器人运动异常
检查关节和轴承是否磨损严重,是否 需要更换;检查电机是否正常工作, 是否需要维修或更换。
系统报错或崩溃
尝试重启机器人系统,检查硬件连接 是否正常;如问题仍然存在,请联系 专业技术人员进行排查和维修。
25
系统备份与恢复操作指南
2024/1/27
定期备份系统数据 使用专用存储设备定期备份机器人系统数据,包括程序、 参数设置、用户数据等。
系统恢复操作 在机器人出现故障或数据丢失时,可使用备份数据进行系 统恢复操作。具体操作步骤请参考使用说明书或联系专业 技术人员进行指导。
注意事项 在进行系统备份和恢复操作时,请确保电源稳定、数据完 整,并遵循正确的操作步骤。如遇到问题,请及时联系专 业技术人员进行协助处理。
高效节能
FANUC焊接机器人采用先进的节能 技术,降低了运行成本,同时提高了 生产效率。
5
焊接机器人应用领域
汽车制造业
焊接机器人在汽车制 造领域应用广泛,如 车身焊接、车门焊接、 座椅骨架焊接等。
航空航天业
航空航天领域对焊接 质量和精度要求极高, 焊接机器人能够满足 高精度、高质量的焊 接需求。
重型机械制造业
运动控制
FANUC焊接机器人具有高精度、高速度的运动控制能力,可以 实现复杂的焊接轨迹和动作。通过编程可以控制机器人的运动 速度、加速度、减速度等参数,以及实现多轴联动、同步控制 等高级功能。
9
编程安全与规范
安全防护
在编写FANUC焊接机器人程序时,需要严格遵守安全规范,确保机器人的运行 不会对人员和设备造成伤害。例如,需要设置安全区域、限制机器人的运动范 围、避免碰撞等。
《工业机器人工作站系统组建(活页式教材)》电子教案 7.1FANUC工业机器人弧焊工作站的硬件连接

1 任务描述 2 学习目标 3 知识准备 4 任务实施
目录
CONTENTS
01 任 务 描 述
任务描述
使用工业机器人CO2气体保护焊接是FANUC工业机器人最典型的一种应 用,本项目通过完成工业机器人硬件连接、FANUC工业机器人I0通讯、 FANUC工业机器人平敷焊接、FANUC工业机器人T形平角焊接,工业机器人 与外部设备之间通过IO模块进行通讯实现机器人控制,组建一套工业机器人 弧焊工作站控制系统。
安装正确时丝径标
号应朝向外侧。
抬起加压臂,将焊
丝插入导套孔2-
6
3cm。
任务实施
步骤4:FANUC工业机器人焊丝的装丝操作
操作步骤
操作说明
示意图
放下压臂轮,并调 节加压力大小合适。
7
点“手动送丝”按 键,使焊丝伸出导 电嘴10mm即可。 8
熔化极电弧焊一般使用直流反接,不仅电弧稳定,而且焊铝时可清除焊件 表面的氧化膜。 CO2气体保护焊为了保持电弧稳定、焊缝成型好,减少飞溅, 一般采用直流反接但是在堆焊和补焊铸铁时,需要提高金属熔敷率并降低工 件的受热,多采用直流正接。
机器人与焊机的通讯中需要传送电压、电流(通用现场应用福尼斯焊机为 调用JOB号,焊机端设置JOB号中的电压、电流参数),本教材使用了硬件IO 板(A20B-2101-0730)CRW11接口线缆传输与焊机的信号。连接方框图如下:
示意图
气管的一端套上紧 固环。
1
气管对着流量阀的
输
15mm。
用十字起上紧紧固 环。
3
任务实施
步骤3:保护气瓶与焊接机器人的连接操作
操作步骤
操作说明
示意图
机器人焊接论文
机器人焊接论文简介机器人焊接是一种自动化焊接技术,它使用机器人代替人工进行焊接操作。
这种技术在制造行业中具有广泛的应用,能够提高生产效率和焊接质量,同时减少人工成本和工作风险。
本文将介绍机器人焊接的原理、应用领域以及未来发展趋势。
机器人焊接原理机器人焊接是指利用机器人进行焊接操作的过程。
它可以分为以下几个步骤:1.取样和传感器检测:机器人会通过传感器对焊接对象进行取样和检测,以获取焊接参数和实时反馈信息。
2.路径规划:机器人根据焊接要求和焊接对象的几何形状,计算出最优的焊接路径。
3.焊接操作:机器人根据路径规划结果进行焊接操作,控制焊接枪的位置、速度和焊接电流,完成焊接任务。
4.质量检测:机器人在焊接完成后,可以使用传感器对焊缝进行质量检测,以确保焊接质量符合要求。
机器人焊接应用领域机器人焊接在制造行业中具有广泛的应用。
以下是一些常见的应用领域:1.汽车制造:汽车制造是机器人焊接的主要应用领域之一。
机器人可以用于焊接车身框架、车身板件以及其他关键零部件。
2.电子制造:机器人焊接在电子制造行业中也有应用。
它可以用于焊接电路板、电子设备外壳和连接线。
3.管道焊接:机器人焊接可用于管道制造领域。
它可以焊接各种类型的管道,包括石油管道、天然气管道和水管道。
4.空间航天:机器人焊接在航天制造领域也有应用。
它可以用于焊接航天器的结构件和航天器发动机部件。
机器人焊接的优势机器人焊接相比传统手工焊接具有许多优势:1.提高生产效率:机器人能够快速、精确地完成焊接任务,提高生产效率。
2.提高焊接质量:机器人焊接可以准确控制焊接参数,保证焊接质量的一致性。
3.减少人工成本:机器人焊接可以代替人工进行焊接操作,减少人工成本。
4.减少工作风险:机器人焊接可以减少人工与高温、有毒等环境接触的风险,提高工作安全性。
机器人焊接的挑战机器人焊接也面临一些挑战:1.复杂工件的焊接:对于一些复杂形状的工件,机器人焊接可能需要更复杂的路径规划和控制算法。
焊接工业机器人论文报告

焊接工业机器人论文报告机械卓越1102 游华栋(1.江阴宇博科技,江苏省江阴市邮编214400;)摘要:工业机器人是面向工业领域的多关节机械手或多自由度的机器人。
工业机器人是自动执行工作的机器装置,是靠自身动力和控制能力来实现各种功能的一种机器。
它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
是要在多学科知识的综合应用方面,强化机器人技术应用能力的培养,以满足机械类应用型高级人才的培养。
结合有关文献对焊接机器人的机械结构、电机驱动、运动学计算、控制技术、传感器、轨迹规划与编程操作等应用进行系统解构。
机器人技术代表了机电一体化技术的最够研究成果,涉及机械工程、电子技术、计算机技术、自动控制理论、自动控制技术及人工智能等多门学科,当代科学技术发展最活跃的领域之一。
关键词:焊接机器人;结构设计;控制方式;感觉系统;W elding industrial robot reports HUADONG YOU(YUBO Technology Co., Ltd. ,Jiangyin, ,JiangYin province, 214400, china)Abstract:The industrial robot is a multi joint manipulator for industrial areas or more degrees of freedomrobot. Industrial robot is automatically performing work machine equipment, a machine that is controlled by its own power and ability to achieve the various functions. It can accept human command, and can also be run in accordance with the procedures of pre-arranged, modern industrial robots can also make according to the principles of the programme of action of the artificial intelligence technology. Is to be in the integrated application of multi subject knowledge, strengthen the training of application ability of robot technology, in order to meet the training applied talents of machinery. Based on relevant documents of a welding robot mechanical structure, the motor drive, kinematics, control technology,sensor, trajectory planningand programming operation application system deconstruction. Robot technology represents the mechatronics technology enough research results related to mechanical engineering, electronic technology, computer technology, automatic control theory, automatic control of multi discipline technology and artificial intelligence, one of the most active fields of contemporary science and technology development.正文:我国开发工业机器人晚于美国和日本,起于20世纪70年代,早期是大学和科研院所的自发性的研究。
2024年FANUC焊接机器人培训-(含多场合)
FANUC焊接机器人培训-(含多场合)FANUC焊接培训一、引言随着我国经济的快速发展,制造业对自动化、智能化设备的需求日益增长。
焊接作为一种重要的自动化设备,广泛应用于汽车、机械制造、船舶、航空航天等行业。
FANUC(发那科)作为全球领先的工业制造商,其焊接产品在性能、稳定性、可靠性等方面具有显著优势。
为了提高我国焊接行业的技术水平,培养更多掌握FANUC 焊接操作、编程和维护的专业人才,本文将详细介绍FANUC焊接培训的相关内容。
二、培训目标1.了解FANUC焊接的基本结构、工作原理和性能特点;2.掌握FANUC焊接的操作、编程和维护方法;3.培养具备实际操作能力的焊接操作员和技术支持人员;4.提高企业生产效率,降低生产成本,提升产品质量。
三、培训内容1.FANUC焊接基础知识:介绍FANUC焊接的发展历程、分类、应用领域及市场前景,使学员对FANUC焊接有全面的认识。
2.FANUC焊接结构及原理:讲解FANUC焊接的机械结构、电气控制系统、传感器、执行器等组成部分,以及各部分的工作原理和相互关系。
3.FANUC焊接操作与编程:教授FANUC焊接的基本操作方法,包括启动、停止、急停、示教、编程等,使学员能够熟练操作FANUC焊接。
4.FANUC焊接维护与故障排除:介绍FANUC焊接的日常维护保养方法,以及常见故障的排除技巧,提高学员的设备维护能力。
5.实践操作:安排学员在模拟环境下进行FANUC焊接的操作、编程和维护实践,巩固所学知识,提高实际操作能力。
6.企业案例分享:邀请具有丰富经验的FANUC焊接应用企业进行案例分享,使学员了解FANUC焊接在实际生产中的应用情况及效果。
四、培训方式1.理论教学:采用多媒体教学、课堂讲解、互动讨论等方式,使学员充分掌握FANUC焊接的相关知识。
2.实践操作:安排学员在模拟环境下进行FANUC焊接的操作、编程和维护实践,巩固所学知识,提高实际操作能力。
3.企业参观:组织学员参观FANUC焊接应用企业,了解实际生产中的设备运行、维护及管理情况。
项目四 工业机器人焊接工作站编程与操作

任务一 认识焊接工作站
焊接机器人的使用在我国行业应用中具有以下主要意义。 (1)稳定和提高焊接质量,保证其均一性。焊接参数(如焊接电流、电压、速度等)对焊 接结果起着决定性作用。采用工业机器人进行焊接时,每条焊缝的焊接参数都是恒定的, 焊缝质量受人为因素影响较小,降低了对工人操作技术的要求,因此焊接质量是稳定的。 采用人工焊接时,焊接速度等都是变化的,因此很难保证质量的均一性。 (2)改善了工人的劳动条件。采用工业机器人进行焊接时,工人只需装卸工件,远离了 焊接弧光、烟雾和金属飞溅等;采用点焊机器人进行焊接时,不再需要工人搬运笨重的手 动焊钳,使工人从大强度的体力劳动中解脱出来,甚至工件的装卸有些也已经实现了自动 化,从而很好地改善了工人的劳动条件。
知识目标
(1)认识焊接工作站的组成。 (2)了解焊接机器人和焊枪。 (3)了解RAPID语言和RAPID数据。 (4)掌握焊接工作站的参数设定方法。
(5)掌握工具坐标系的建立方法。 (6)掌握焊接指令的使用方法。
能力目标
能够根据任务需要手动强制
能够根据任务需要手动设定
能够正确创建和定义工具数
输入输出信号(1)。底座:底座是整个工业机焊器接人机的器支人持原部点分位,具置有数一据定。的刚度和稳定据性。,有固定式和 移动式两种。
任务二 焊接工作站的参数设定
项目四任务二的任务描述
1.工作内容 (1)根据课前资源、网络资源等进行预习,完成课前学习任务。 (2)分析本任务的工作要求,制订、优化工作计划。 (3)分析焊接参数的设定方法,按计划开展工作。 (4)记录实施过程。 (5)按工作检查表中的检查内容逐项自查、互查至合格。 (6)按综合评价表中的评价项目逐项进行打分。 (7)完成测试,总结学习、工作情况。
焊接机器人设计毕业论文

焊接机器人设计毕业论文摘要[0001]本发明涉及一种用来电阻焊工作的焊接机器人,它包括一个焊钳(21),一个焊接电流发生器(1),发生器连接在焊钳上的焊接电极(24,25),在电阻焊工作中为焊接电极提供电能,一个工业机器人。
工业机器人包括机器人手臂(2)和用于控制手臂移动的机械手控制装置(9)。
焊钳被连接到机器人手臂上,机械手控制装置被连接到焊接电流发生器和一个焊钳的钳驱动器上。
描述:本发明涉及一种焊接机器人。
[0002]DE 31 15 840 A1中介绍了焊接所用电阻,其特征在于,在焊接过程中,两焊接电极之间的电阻以参考电阻曲线为基准,随着电焊条接触力的变化而自动调整,此外,焊接电极所用的电压亦被调整至参考电位曲线上。
[0003]EP 1 508 396 B1 中介绍了焊接所用机器人,包括工业机器人和连接在机器人手臂上的焊钳。
焊钳,跟随机器人手臂移动,包含有两个电极臂,一个用来驱动电极臂的电动机,还有用于测量电机臂施加的接触力大小的力传感器。
该焊接装置还包括一个校正装置,根据实际接触力与理论接触力的偏差值,确定一个合适的变量来校正电动马达的位置。
[0004]本发明的目的是提供一种改善的焊接机器人。
[0005]本发明旨在创造一种用于电阻焊的新型焊接机器人,它包含以下几个方面:[0006]焊钳,由钳驱动器和两焊接电极构成,由钳驱动器驱动,在焊接机器人工作中,对至少两个要进行电阻焊接的材料加压。
[0007]焊接电流发生器,连接到焊机电极上,电阻焊工作中为焊接电极提供电能。
[0008]工业机器人,由机械手臂、机械手控制装置构成,控制装置用于控制机械手臂的移动,其中机器人手臂配置有为数众多的相互连接的肢,驱动连接到控制装置,焊钳连接到焊接电流发生器和钳驱动器上,在控制平台运行的电脑程序控制机械手臂的移动驱动器,钳驱动器也被设定好的模式控制着,使得在进行电阻焊作业时,预期的电位可以应用于焊接电极上,同时,也可以使得焊接电流发生器为焊接电极提供预期的电能。
工业机器人结课论文

《工业机器人》课程论文题目:目录一:摘要--------1二:关键词---------1三:引言--------1 四:工业机器人发展历程--------1 五:机器人分类--------6 六:机器人基本应用及技术参数-------6 七:工业机器人前景展望--------8 八:工业机器人的技术探索---------10工业机器人的认识与分析-《工业机器人》结课论文摘要:通过近一个学期的《工业机器人》的课程学习,在老师的讲解和自己课下的学习过程中,我对机器人技术尤其是工业机器人有了较为深刻的认识。
我掌握了工业机器人基本的发展历程,并了解了机器人的分类和不同场合的性能要求。
对于机器人技术有了自己的理解和认识。
并认识到我们的机器人技术还有着极为漫长的道路要走,还需要更加深入的技术探索与研发。
关键词:工业机器人,发展历程,分类,展望,技术探索,基本知识。
引言:在接触《机器人技术》这门课程之前,对于机器人的理解仅仅局限在动漫和电影里机器人大战的场面,更现实一些的也是新闻中能有动作的人形机器人。
可是一个学期的机器人技术学习让我意识到了机器人不仅仅是科幻中的威武,更融入了生活中的方方面面,与我们的生活息息相关。
它的技术发展,实际上契合了我们社会的科学技术的进步史。
工业机器人发展历程我国机器人最早体现在鲁班的机械设计杰作——可飞木鸟中,是最早记录的机器人概念的作品。
之后的张衡发明的地动仪和指南车,三国时的木牛流马,都体现了我国古代劳动人民的聪明智慧。
具有了明显的机器人的功能与结构。
自1662年,日本竹田近江发明了机器玩偶,机器人进入了一个较为迅速的发展阶段。
1738年,法国技师设计了机器鸭。
1768年,瑞士钟表匠设计了写字偶人等作品,采用了巧妙地机械结构。
1893年,加拿大莫尔设计了能行走的机器人,之后,机器人在各影视作品中广泛出现,并逐渐赢得了科学家的青睐。
我国的工业机器人研制虽然起步晚,起步于70年代初,其发展过程大致可分为三个阶段:70年代的萌芽期;80年代的开发期;90年代的实用化期。
FANUC机器人螺母凸焊自动化工作站概述

FANUC机器人螺母凸焊自动化工作站概述Qian Xuefeng;Peng Xiaoyong【摘要】基于汽车整车工厂对车身焊接工艺的稳定性和可靠性要求的不断提高,机械自动化相对人工在生产效率上的巨大优势,工业机器人在实际生产中应用越来越广泛.文章主要介绍凸焊自动化工作站的设备配置、作业流程及主要技术要点.【期刊名称】《汽车实用技术》【年(卷),期】2019(000)002【总页数】2页(P152-153)【关键词】FANUC机器人;凸焊自动化;汽车【作者】Qian Xuefeng;Peng Xiaoyong【作者单位】;【正文语种】中文【中图分类】U466前言汽车制造业的蓬勃发展,对其配套零部件的生产效率及质量的要求在不断提高。
传统人工搬运零件进行立点焊的工作模式已经逐渐被机器人自动化作业所取代,立点焊自动化不仅相对人工节约了人力物力,而且也提高了零部件的焊接质量和生产产能。
1 行业背景汽车为实现装配过程中的功能性需求,在车身上需要有大量的凸焊螺母、螺栓的存在。
传统的汽车配件供应商在生产零部件过程中,使用人工进行焊接凸焊紧固件,在一些质量较重、紧固件种类较多且需求量较大的部件上,人工作业容易出现产能较低、安全风险较大且质量波动较为频繁的情况。
在此种背景下,汽车配件生产商开始尝试使用机器人搬运配合凸焊机进行自动化集成生产。
从实际效果来看,机器人自动化凸焊工作站的在一些零部件的应用中,减少了作业人员,改善了人员作业环境,并且生产效率和质量的稳定性也得到了较大的提高。
2 机器人自动化凸焊系统凸焊自动化工作系统主要包括:自动化搬运机器人及零件夹持系统、螺母输送及焊接系统,机器人作业程序。
2.1 搬运机器人及零件夹持系统2.1.1 搬运机器人随着工业自动化的长足发展,自动化工业机器人在各行业的应用越来越广泛。
机器人在持续作业过程中相比人工更加精确,在重量较大的零件生产过程中可有效的减少人员的劳动强度,改善操作人员的作业环境。
技工院校工业机器人编程的教与学——以法那科机器人为例
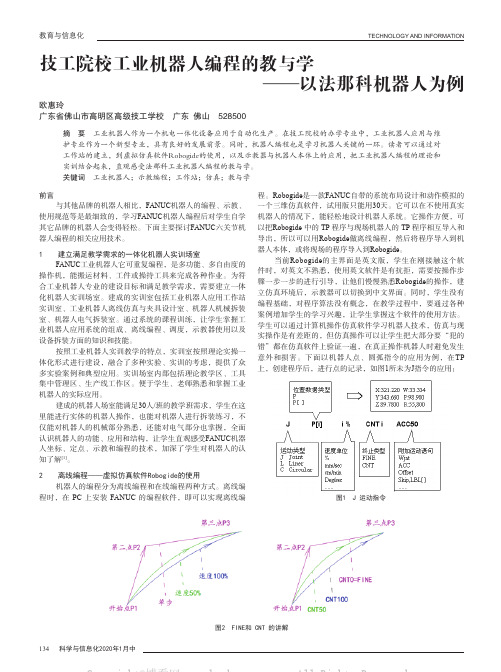
图3-1 公鸡简笔画 图3-2 冠、嘴、身的定点
要寻求机器人的最高工作效率,在机器人的运动轨迹上尽可能少断续点,机器人运动轨迹尽可能连续。
经过分析,图是完成涂胶过程的轨迹分析,在鸡冠选取从P2点出发顺时针
->P13点“绘制”鸡身,可以让鸡冠、点开始,既保持了动作的连续,也不会让机器人频繁启停喷枪。
所以公鸡简笔画的喷涂顺序是:鸡冠->鸡身->
尾巴。
在图3-2 中P20、P21本身就是绘制鸡身时的定位点,也是绘制脚时的点,重复利用P20、P21为了让机器人的定点更少,减少编程定点的工作量。
定好点以
的位置,按下使能键+SHIFT+FWD键,机器人就能按照定好的点进行绘制。
通过示教器与机器人的操作,能实时监测机器人的各个关节的运动情况。
轴都由一个伺服电机控制的,伺服电机连着旋转编码器,将机器人的运动位置反馈给控制系统。
在实训教学中,让学生观察机器人的每个关节的运行情况,然后结合机器人本体的实际操作,动手操作体会,用右手定则,让学生明
向。
在教学过程中,以具体的工作任务为导向,能够让学生从任务中学到工业机器人方面的专业知识,通过对工作任务的完成,使用学生达到理论联系实际、活学活用的目的,提高其实际应用技能,并使学生养成善于观察、独立思考的习惯,与实际工作密切相关,以提高学生对工业机器人新知识和新技能的兴趣。
如搬运、涂胶、分拣、激光焊接等实训进行直观教学,让学生有一定的成就感,提高学习兴趣,开拓创新思维。
结束语
工业机器人可以按编好的程序运行,已为工业生产带来很。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FANUC工业机器人焊接工作站课程资源开发摘要本设计是利用Flash、Roboguide8.03、Power point、PhotoshopCS5、CamtasiaStudio9.0等软件制作FANUC工业机器人焊接工作站课程资源开发的课件及相关的教学视频,以职业学校教育为主的就业向导编写教学讲义,针对一套完整的多媒体教学课件开发过程,合理利用Roboguide8.03、Power point、Flash、CamtasiaStudio9.0中各种设计理念,针对教育教学信息进行相关处理,形成图文并茂的多媒体教育教学系统,进行多方位立体化教育教学,既能激发了学生们的学习兴趣,又有利于学生对教学内容的掌握和理解,弥补了现实资源及传统教育教学方式的干涩枯燥等方面的不足,让那些抽象的内容变得更容易的被学生掌握和理解,可以取得传统教学方法难以获取的教学效果。
在这种多媒体教学模式下,更能发挥教师的主观能动性,增强教师与学生的互动性,提高教育教学效率,专项培养出优秀的技术人员。
关键词:焊接工作站;多媒体课件;Roboguide8.03;FlashFANUC industrial robot welding workstationCurriculum resources developmentABSTRACTThis design is the use of Flash, Roboguide8.03, Power point, PhotoshopCS5, CamtasiaStudio9.0 and other software to create a FANUC industrial robot welding workstation curriculum resources development courseware and related teaching video to the school education, occupation employment guide to write teaching notes, for the development of multimedia teaching courseware of a complete, reasonable use of Roboguide8.03, Power point, Flash, CamtasiaStudio9.0 in various The design concept, related to education and teaching information, multimedia teaching system with the form, multi-faceted three-dimensional teaching can not only arouse students' interest in learning, and help students to grasp and understand the teaching content, to make up for the lack of realistic resources and traditional teaching methods of dry boring etc. and let those abstract contents more easily grasp and understand the students, can obtain the traditional teaching methods can not obtain the teaching effect of multimedia teaching. In this mode, it can play the subjective initiative of teachers, enhance the interaction betweenteachers and students, improve the teaching efficiency of College To develop excellent technical staffKey words: welding workstation; multimedia courseware; Roboguide8.03; Flash目录1绪论 (1)1.1 研究背景 (1)1.2 选题的意义与目的 (1)2课程资源开发的总体思路与框架 (3)2.1 课程资源开发的总体思路 (3)2.2课程资源开发的框架 (3)3 课程资源开发工具简介 (6)3.1 Roboguide8.03概述 (6)3.2 Flash概述 (6)3.3 CamtasiaStudio9.0概述 (8)3.4 PhotoshopCS5概述 (10)3.5 Power Point概述 (10)3.6 小结 (11)4教学讲义的编写 (12)4.1教学讲义编写的原则 (12)4.2教学讲义编写的思路 (12)4.3教学讲义的主要内容 (13)4.3.1 工业机器人焊接的分析 (13)4.3.2工业机器人焊接工作站的分析 (14)4.3.3工业机器人焊接工艺的分析 (14)4.3.4工业机器人焊接指令的分析 (15)4.3.5 工业机器人焊接工作站的模拟仿真分析 (16)4.3.6 工业机器人焊接工作站的示教分析 (16)4.4 小结 (16)5 教学设计与规划 (17)5.1 教学方法 (17)5.1.1 讲授法 (17)5.1.2 案例教学法 (17)5.1.3 情景教学法 (17)5.2 教学大纲 (18)5.2.1 课程性质 (18)5.2.2 课程目的与要求 (18)5.2.3 课程任务 (19)5.2.4 适用的专业及学时 (19)5.2.5 教学重难点 (20)5.3 教学分析 (22)5.4 小结 (22)6 多媒体课程资源的设计与制作 (23)6.1教学动画的设计 (23)6.1.1动画素材的准备 (23)6.1.2动画的设计与制作 (26)6.2 仿真视频的录制 (30)6.2.1 仿真视频的工作准备 (30)6.2.2 仿真视频的制作 (31)6.3教学课件的设计 (35)6.4多媒体教学资源整合 (35)7总结与展望 (39)参考文献 (40)致谢 (42)附录:课堂教学设计方案 (44)FANUC工业机器人焊接工作站课程资源开发1绪论1.1 研究背景随着科技的高速发展与进步,视频、动画、仿真教学课件的应用逐渐成为建设智能课堂的组成部分,使用多媒体教学已经成为学校教学、企业培训中不可或缺的重要手段。
多媒体教学课件以其丰富的表现力、良好的交互性、极大的共享性和充足的信息量等优势在教学、培训中发挥着十分重要的作用。
近年来,随着智能制造的迅速发展,工业机器人逐渐进入课堂,在机器人2.0和中国制造2025政策发布后,工业机器人在弧焊领域也迅速的发展起来,全球将近一半的机器人用于各种形式的焊接加工领域。
将来必将成为机械、机电专业中比较新颖而又难以掌握的课程之一,由于科技的高速发展,对培养目标也提出了更高的要求,课程教学带来巨大压力。
多媒体、仿真教学的出现,将工业上结构复杂机器人、各种难以模仿的动作转化成优美的图像、、有趣的动画,大大地降低学习难度,让学生易于接受,如临现场,真正做到寓教于乐,从而达到教学效果。
1.2 选题的意义与目的本设计是利用Roboguide8.03、Flash软件、Power point、CamtasiaStudio9.0、PhotoshopCS5软件制作FANUC工业机器人焊接工作台的相关学习课件,针对一套完整的多媒体教学课件开发过程,一方面该设计利用Flash、软件中各种设计思想,对文字、图像、声音、动画等信息进行处理,形成声、像、图、文并茂的多媒体教学系统,进行视、听、触、想等多种方式的形象化教学;另一方面,我们运用Roboguide8.03,实现了工业上的焊接功能,有利于学生对数学教学内容的理解和掌握,弥补了传统教学方式的直观感、立体感和动态感等方面的不足,使一些抽象、难懂、的内容变得易于理解和掌握,能取得传统教学方法无法取得的效果。
在这种多媒体教学模式下,更能发挥教师的自主性、增强师生互动、激发学生的学习兴趣、提高课堂的教学效率。
本课件使用Roboguide8.03对机器人的动作进行模拟,实现机器人的焊接功能。
同时,结合启发学生法、讲授教学法、直观演示法、项目训练教学法及操作技能教学法,通过Flash动画软件开发制作了大量的教学动画;拍摄并通过后期CamtasiaStudio9.0制作微课以及教学视频,最后把这些教学资料采用Power point进行有机整合,完成多媒体课件的开发。
而导航与框架两者配合使用可以实现程序的转向功能,使用框架结构1可以完成复杂功能,同时也可以个性化处理课程资源的画面、背景及导航按钮等。
因此,采用Flash软件、Roboguide8.03等软件制作本课件,改变传统呆板的、以老师为中心的教育模式,也进一步加强师生交流,激发学生的学习兴趣,不断提高教学效果。
2FANUC工业机器人焊接工作站课程资源开发2课程资源开发的总体思路与框架2.1 课程资源开发的总体思路本文针对一套完整的多媒体教学课件的开发过程,一方面利用Flash CS6、Photosh opCS5、Power point软件中各种设计思想,制作出集音、像、动画以及富有新意的界面于一体的多媒体教学课件,实现人机交互、界面华丽、控制灵活等功能,另一方面,运用FANUC仿真软件,实现了工业上的焊接过程仿真。
在多媒体教学模式下,更能发挥教师的自主性、增强师生互动、激发学生的学习兴趣、提高课堂的教学效率。
利用Flash 制作课件,系统地介绍课程设计的全过程,化抽象思维为形象思维,充分地发挥多媒体教学的优势,优化课堂教学。
将复杂的文字转化成优美的图像、有趣的动画,降低学习难度,也弥补了传统教学方式的直观感、立体感和动态感等方面的不足。
最后以ppt的形式整合起来,形成一个教学课件。
2.2课程资源开发的框架本课程资源主要根据中职的教育理念,学生的就业方向进行开发,主要内容包括工业机器人焊接工作站讲义的编写、教学设计与规划和多媒体课程资源的设计。
具体的课程资源开发框架如图2.1所示:3图2.1 课程资源开发框架图(1)课程开发工具:Roboguide8.038.03、Power point、PhotoshopCS5CS5、FlashCS6、CamtasiaStudio9.0(2)FANUC工业机器人焊接工作站讲义的编写:第一章:工业机器人焊接的介绍第二章:工业机器人焊接工作站第三章:焊接工艺第四章:焊接指令讲解第五章:工业机器人焊接工作站的模拟仿真第六章:工业机器人焊接工作站的作业示教(3)教学设计与规划①教案的编写4FANUC工业机器人焊接工作站课程资源开发②教学大纲的制定③课堂教学过程设计(4)多媒体课件制作①教学动画的设计②教学视频的录制③教学课件的设计(5)多媒体教学资源的整合将编写好的六章讲义,教学设计与规划中的教学大纲、教学设计和教学设计,还有教学课件中的教学视频、教学动画和教学课件一起用Power point进行整合。