26自由度仿人机器人
仿人机器人简介
ZMP:ZMP就零位点,重心和惯性力的合力方向,机器人要稳定行走 ZMP点必须落在机器人的双足底板上。
研究概况
运动学匹配
运动捕捉
动力学匹配
本体实验
仿真
图2 系统构成
仿人机器人实验室
SONY公司的SDR-4X
28个自由度,64位RISC计算机两片控制,ISA伺服模块
继P2,P3以后的ASIMO
本田公司ASIMO
娱乐机器人
2004年03月03日本 ZMP 机器人公司,在东京 推出一种人形机器人,这种机器人高39厘米,重 2.5公斤,可用手机进行远程遥控,并具有语音识 别功能;;而且这一机器人还可将拍摄的画面通 过电话发送到主人的手机上。目前这种机器人已 进入市场,目前售价为仅为2.75万美元
QRIO
们娱 有乐 多机 远器 ?人 离 我
机器人介绍
什么是仿人机器人,和普通工业机器人的区别。 本田公司的ASIMO,p2,p3,SONY公司的SDR-3X QRIO等 用途:未来可在工业,民用,军事等许多方面发挥作用, 代表了机器人技术的一个发展方向。Leabharlann 仿人机器人的基本要素,基本功能
本体,视觉,听觉,触觉 行走,其他功能
仿人机器人实验室
历史概况
国内概况
在国内,哈尔滨工业大学,清华大学、国 防科大、中国科学院自动化所和北京理工 大学等单位也在这一领域取得了一定的成 果。
朱春雷
仿人机器人的研制开始于本世纪60年代末,只有三十多年的历史. 然而,仿人机器人的研究工作进展迅速.国内外许多学者正从事于 这一领域的研究,如今已成为机器人技术领域的主要研究方向之 一.1968年,美国的R.Smosher(通用电气公司)试制了一台叫“Rig” 的操纵型双足步行机器人机械,从而揭开了仿人机器人研制的序 幕.1968年,日本早稻田大学加藤一郎教授在日本首先展开了双足 机器人的研制工作. 1969年研制出WAP-1平面自由度步行机.该机 器人具有六个自由度,每条腿有髋、膝、踝三个关节.利用人造橡 胶肌肉为关节,通过注气、Refined)双足机器人.该型机器人采用预 先设计步行方式的程序控制方法,用步行运动分析及重复实验设计 步态轨迹,用以控制机器人的步行运动
10个机器人构型示例

03 履带式机器人
该机器人由四条履带组成, 机体上端配置有两条机械 臂,用以装置摄像头和机 械手来完成相应任务,在 结构上这种履带式机器人 相比坦克的“单节双履带 式”机器人具有更好的越 障能力,其两条外履带可 以相当于“辅助手臂”帮 助跨越障碍。
04 自行车机器人
自行车运动力学特征较为 复杂,其两轮纵向布置, 与地面无滑动接触,它本 身就是一个欠驱动的非完 整系统,还具有一定的侧 向不稳定性,如果不对它 实施侧向控制,自行车就 一定会不能站立起来。
01 四足搜救机器人
机器人每足具有三个 自由度,其中大腿关 节具有前后摆动和上 下转动两个自由度, 膝关节具有一个上下 转动自由度. 质量约 40 kg,有效负载5 ~ 7 kg,行走速度达到0. 3 ~ 0. 9 /s. 该机 器人的体积和重量都 较大,步态切换的灵 活性受到抑制.
02 轮足混合式的四足机器人
其可以在足式移动方式和 轮式移动方式之间进行切 换,用以实现在不同的结 构环境下以不同的方式行 进,当机器人进行步态行 走时,两个驱动轮通过电 磁铁锁死,车轮与机器人 小腿形成一体,机器人通 过驱动每条腿髋关节两个 自由度和膝关节一个自由 度进行步态行走. 当机器 人进行轮式驱动时,髋关 节两个自由度和膝关节一 个自由度锁死,驱动轮电 磁铁打开,通过驱动轮快 速前进。
仿人柔性机械手说明书

仿人柔性机械手设计摘要灵巧机械手是近年来机器人领域讨论的热门话题,世界上很多国家的研究机构都开展了关于机械手的研究。
本文重点讨论了机械手的运动系统,包括机构,传动和驱动,本课题主要研究内容如下:第一章概述。
主要介绍课题来源、国内外现状以及本文所要作的工作。
第二章灵巧机械手总体方案设计。
先后介绍了灵巧机械手总体方案的初步设计,灵巧机械手的设计步骤、主要参数的计算、关键的结构设计,机械传动系统和电气驱动设计。
第三章对方案二的改进设计综述。
论述了方案二的结构与传动设计。
第四章关键结构(零部件)的分析和设计。
为了提高机械手的运动速度和控制精度,要求机械手的传动机构具有结构紧凑、体积小、重量轻、无间隙和响应快的特点。
第五章总结和提高。
本章是对全文的总结,在总结的基础上进一步的指出了本课题研究存在的问题,及灵巧机械手研究发展方向等。
关键词:仿人柔性机械手工作原理机构设计自由度Design of Humanoid Flexible ManipulatorAbstractThe flexible manipulator is the hot issue that the robot realm discusses in recent years and Many research institutions have conducted research on the robot. This essay discussed the sport system of flexible manipulator, include mechanism, transmission and drive, this topic mainly studied the contents as follows:Chapter 1 Outline. Introduce the subject of the source of the topic at home and abroad as well as the work which will be accomplished.Chapter 2 Overall program design. Introduce the preliminary design of the dexterous manipulator of the overall program, design steps, the calculation of the main parameters, the key structural design, mechanical transmission, and electric-driven design.Chapter 3 The plan of the two design improvement. Discusses the structre and transmission designChapter 4 Analysis and design of key structures (parts). In order to improve the robot's movement speed and control accuracy, the robot drive mechanism has a compact structure, small size, light weight, seamless and fast response.Chapter 5 S ummarize and improve. This chapter is a summary of the full text, and further pointed out the problems in this research, and Dexterous Manipulator direction of development on the basis of summing up.Keywords:Flexible manipulator; Working principle; Mechanical design; Freedom degree目录1. 引言 (1)1.1 课题来源 (1)1.2 国内外现状 (2)1.3 关键技术 (4)1.3.1 小而强的驱动 (5)1.3.2 丰富的感觉 (5)1.3.3 聪明的大脑 (6)2. 灵巧机械手方案设计 (7)2.1 灵巧手设计的基本原则 (7)2.1.1 手型的选择 (7)2.1.2 自由度的选择 (7)2.1.3 驱动器的选择 (7)2.2 总体方案的比较 (8)3. 方案二的改进设计综述 (10)3.1 手指机构的传动方案设计 (10)3.2 FRJ-11灵巧手的整体结构设计 (11)3.2.1 关节的结构设计 (11)3.2.2 手指关节间连接机构的设计 (13)3.2.3 手掌的结构设计与制作 (13)4. 关键结构(零部件)设计与分析 (15)4.1 手指机构设计 (15)4.1.1 拇指机构运动学分析 (18)4.1.2 4关节手指机构(食指,中指)运动学分析 (19)4.2 传动与结构设计 (21)4.3 驱动设计 (24)5. 结论与展望 (25)5.1 结论 (25)5.2 未来展望 (25)结语 (27)参考文献 (28)致谢 (29)1.引言机器人多指灵巧手是一种仿人手的装置,它具有力觉、触觉、视觉和温度感知能力,可以代替人在危险、恶劣的环境下完成普通装置所不能完成的复杂操作任务。
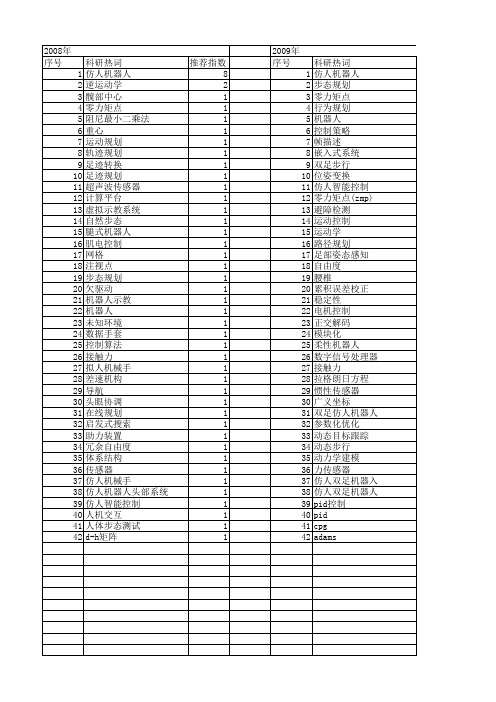
【国家自然科学基金】_仿人机器人_基金支持热词逐年推荐_【万方软件创新助手】_20140730
2012年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46
推荐指数 8 3 2 2 2 2 2 2 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2010年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68
2011年 科研热词 推荐指数 仿人机器人 15 零力矩点 3 步态规划 3 can总线 2 高刚性 1 驱动器系统 1 马氏距离 1 颜色识别 1 追踪 1 运动控制 1 运动学分析 1 运动学 1 轻量化 1 路径规划 1 跑步状态模型 1 足球机器人 1 虚拟样机 1 自适应神经模糊推理系统 1 自然姿态 1 脑机接口 1 网格计算 1 网格分割 1 绳驱动 1 约束 1 稳态视觉诱发电位 1 相似性 1 目标定位 1 电机调速系统 1 模糊逻辑 1 机构设计 1 机器人跑步 1 最小二乘算法 1 最优控制 1 无线传感器网络 1 无刷直流电机 1 数字信号处理芯片 1 改进遗传算法 1 手势识别 1 微粒群优化 1 开放式系统 1 嵌入式单目视觉 1 小波变换 1 复杂环境 1 启发式搜索算法 1 可持续学习能力 1 反馈控制 1 双臂建模 1 参数化优化 1 动力学仿真 1 动力学 1 加速度传感器 1 力/力矩传感器 1
基于多自由度机器人仿真工作站的设计与实现

基于多自由度机器人仿真工作站的设计与实现随着科技的不断发展和应用需求的增加,机器人技术在各个领域得到广泛应用。
在机器人研究与开发过程中,仿真工作站作为一个重要的工具,扮演着模拟和验证机器人系统性能的关键角色。
本文将介绍基于多自由度机器人仿真工作站的设计与实现,具体包括系统框架设计、核心功能实现以及实验结果分析等内容。
一、系统框架设计在设计多自由度机器人仿真工作站的系统框架时,需要考虑到系统的稳定性和实时性。
根据这一目标,我们将系统分为仿真控制模块、动力学仿真模块和视觉模块三个子模块。
1. 仿真控制模块:该模块是整个仿真工作站的核心部分,负责机器人的运动控制。
它包括轨迹规划、运动控制和碰撞检测等功能。
通过该模块,用户可以灵活地设定机器人的运动轨迹,并且实时监控机器人的运动状态。
2. 动力学仿真模块:该模块模拟机器人系统的动力学特性,包括力学模型、关节传动特性等。
通过该模块,可以实现对机器人的动力学仿真,并且可以提供精确的运动学解算结果。
3. 视觉模块:该模块用于机器人环境的仿真显示和图像采集。
通过该模块,用户可以实时观察机器人在仿真环境中的运动轨迹和工作状态,并且可以采集机器人周围环境的图像信息。
二、核心功能实现在实现多自由度机器人仿真工作站的核心功能时,需要结合实际需求和技术条件,合理设计算法和程序。
以下是其中的几个核心功能的介绍。
1. 运动轨迹规划:通过该功能,用户可以设定机器人的运动轨迹,可以选择直线运动、圆弧运动等不同的轨迹类型,并通过插值算法实现平滑的运动轨迹生成。
2. 运动控制:该功能实现对机器人的实时运动控制,通过控制机器人关节的力矩输出,实现机器人的精确控制。
其中,PID控制算法和运动学解算算法是实现该功能的关键。
3. 碰撞检测:该功能用于在机器人运动过程中实时检测机器人与环境的碰撞情况,以避免机器人碰撞事故的发生。
该功能需要结合3D建模技术和碰撞检测算法进行实现。
三、实验结果分析在完成多自由度机器人仿真工作站的设计和实现后,我们进行了一系列的实验,并对实验结果进行了详细的数据分析。
工业机器人自由度是什么-工业机器人自由度有几个
工业机器人自由度是什么?工业机器人自由
度有几个
什么是机器人的自由度?一般来说,机器人机构能够独立运动的关节数目,称为机器人机构的运动自由度,简称自由度。
通常自由度作为机器人的技术指标,能反映机器人动作的灵活性,可用轴的直线移动、摆动或旋转动作的数目来表示。
工业机器人自由度有几个?工业机器人自由度一般分为4个自由度,或者6个自由度,关节机器人主要是模仿人的手臂进行设计的。
所以关节机器人的自由度就是指有几个电机带动的几个轴,自由度越高,灵活性越高,也有1个的,或2个、3个、5个等等,主要是根据工作内容,工作范围,设计不同的自由度,达到要求。
虽然随着轴数也就是自由度的增加,机器人的灵活性也随之增长,但在目前的工业应用中,用的较多的也就是三轴、四轴、五轴双臂和六轴的工业机器人,轴数的选择通常取决于具体应用。
目前工业机器人采用的控制方法是把机械臂上每一个关节都当作一个单独的伺服机构,即每个轴对应一个伺服器,每个伺服器通过总线控制,由控制器统一控制并协调工作。
在工业自动化应用中,机器人的底座可固定也可移动。
可见工业机器人的轴数是其重要技术指标。
多自由度机械臂的设计以及运动仿真
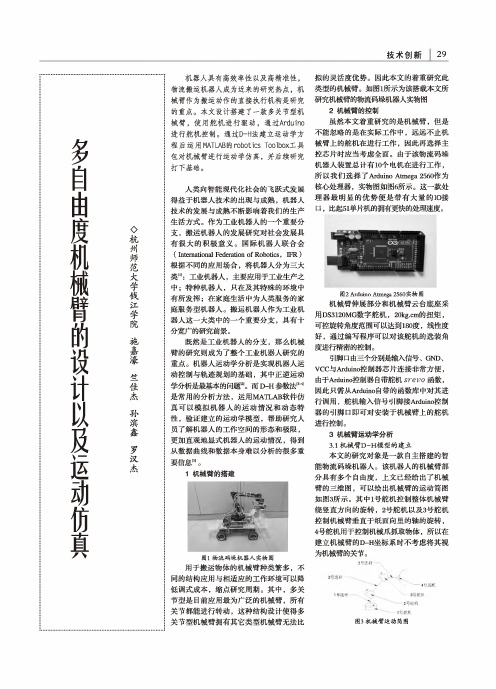
技术创新 29◊杭州师范大学钱江学院施嘉濠竺佳杰 孙滨鑫罗汉杰多自由度机械臂的设计以及运动仿真机器人具有高效率性以及高精准性, 物流搬运机器人成为近来的研究热点,机械臂作为搬运动作的直接执行机构是研究 的重点。
本文设计搭建了一款多关节型机械臂,使用舵机进行驱动,通过Arduino进行舵机控制。
通过D-H 法建立运动学方 程后运用MATLAB 的robotics Toolbox 工具包对机械臂进行运动学仿真,并后续研究 打下基础。
人类向智能现代化社会的飞跃式发展 得益于机器人技术的出现与成熟,机器人 技术的发展与成熟不断影响着我们的生产生活方式。
作为工业机器人的一个重要分 支,搬运机器人的发展研究对社会发展具有很大的积极意义。
国际机器人联合会 (International Federation of Robotics , IFR )根据不同的应用场合,将机器人分为三大 类叫工业机器人,主要应用于工业生产之 中;特种机器人,只在及其特殊的环境中 有所发挥;在家庭生活中为人类服务的家庭服务型机器人。
搬运机器人作为工业机器人这一大类中的一个重要分支,具有十 分宽广的研究前景。
既然是工业机器人的分支,那么机械臂的研究则成为了整个工业机器人研究的 重点。
机器人运动学分析是实现机器人运 动控制与轨迹规划的基础,其中正逆运动学分析是最基本的问题鷺而D-H 参数法X是常用的分析方法,运用MATLAB 软件仿 真可以模拟机器人的运动情况和动态特 性,验证建立的运动学模型,帮助研究人员了解机器人的工作空间的形态和极限,更加直观地显式机器人的运动情况,得到 从数据曲线和数据本身难以分析的很多重 要信息曲□1机械臂的搭建图1物流码垛机器人实物图用于搬运物体的机械臂种类繁多,不 同的结构应用与相适应的工作环境可以降低调式成本,缩点研究周期。
其中,多关节型是目前应用最为广泛的机械臂,所有关节都能进行转动,这种结构设计使得多关节型机械臂拥有其它类型机械臂无法比 拟的灵活度优势。
哈尔滨工业大学科技成果——HIT、DLR仿人形机器人灵巧手

哈尔滨工业大学科技成果——HIT/DLR仿人形机器人灵巧手主要研究内容
HIT/DLR仿人型机器人灵巧手有4个相同结构的手指、共有13个自由度,每个手指有4个关节、3个自由度,拇指另有一个相对手掌张开/闭合的自由度。
采用机电一体化设计思想,实现了集成化、模块化的灵巧手手指和可重构的手掌。
技术特点
基于FPGA/DSP的高速串行通讯系统和实时控制系统;
集成有关节绝对位置、电机相对位置、关节力矩、手指尖六维力/力矩及温度等多种感知功能;
具有友好的操作环境和外部通讯软件接口;
实现了灵巧手的拟人手形外观;
灵巧手总体重量1.65Kg,外形尺寸略大于人手。
两栖仿生机器人研究综述_杨清海
关 键词 :两栖仿生机器人 ;腿式机器人 ;蛇形机器人 中 图分类号 : TP24 文献标识码 : A
近年来 , 计算机系统的发 展推动了机器 人技术 的进步 , 机器人的种类不断增加 , 除了主要用于制造 业的工业机器人外 , 还出现了应用于航天 (如美国的 勇气号 和机 遇号 火星 车 )、航 海 (如深 海作 业机 器 人 )、医疗护 理 (如手 术机器人 )、服务 (如机 器人保 姆 )、军事 (如排雷机器人 )等领域的机器人 .但是 , 大 多数机器人只能在单一环境下活动, 例如陆地移动 机器人由于没有水中推进机构或不具备防水功能 , 不能进行水下活动, 而水下机器人大多不具备或没 有足够的陆地运动能力 .受两栖类动物的启发 , 人们 对既能适应陆地和近海滩涂的多变地形, 又能适应 复杂水环境的两栖机器人产生了浓厚的兴趣 , 自然
图 5 机器龟 Madeleine Fig.5 RoboticturtleMadeleine
上海交通大学机器人研究所的研究人员通过对 生态龟的生活习性 、结构特点 、运动方式的观察与研 究 , 在一种乌龟爬行玩具的基础上 , 提出了一种四足 两栖机器龟 , 使其具有生态龟的结构形式和运动形 式 , 能够在水中游动和在陆上爬行 [ 15] .机器龟的具体 设计方案已经申请国家专利 [ 16] . 2.4 其它轮腿式两栖机器人
图 3 Ursula探测水雷 Fig.3 TheUrsulaALUVdetectingamine
图 4 仿 生机器蟹在实验中 Fig.4 Acrab-likerobotprototypeinexperiment
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第2期(总第147期)2008年4月机械工程与自动化MECHANICALENGINEERING&AUTOMATl0NNo.2Apr.文章编号:1672—6413(2008)02—0130—0226自由度仿人机器人的设计与控制冯威,陈工(北京科技大学机械:y-程学院,北京100083)摘要:设计了一个具有26个自由度的仿人机器人.该仿人机器人具有与真实人物极为相似的外观形象,通过PICl6F877芯片对多台舵机和直流电机进行协调控制.完成眼睛、眉头、嘴角等面部表情动作和手臂、腰部等行为动作。
通过该系统能够为人工智能、行为控制、人工心理等研究提供一个高效综合的试验和演示平台。
关键词:仿人机器人,舵机控制;单片机中图分类号:TP242.6文献标识码:A0引言,机器人这个词语人们并不陌生,我国科学家对机器人的定义如下:机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。
随着科学技术的发展,机器人的应用领域也在不断拓宽,逐渐由制造业向非制造业和服务行业发展,具有人类的外形特征、可以模仿人类行为能力的仿人机器人已经出现,因此该领域集成了人工智能、人机工程学、电子技术、机械以及计算机等多学科知识及多项高新技术。
仿人机器人代表了机器人的尖端技术。
1机构设计针对仿人机器人的设计要求,从仿人外形、仿人运动功能实现及机器人整体结构出发,在考虑机构的运动学、动力学和控制系统、驱动系统要求的前提下进行了仿人机器人的机械机构设计。
该仿人机器人高约1.65m,重量不超过65kg,共有26个自由度。
1.1电机选型仿人机器人机构设计中关节轴系的设计必须结构紧凑,传动精度和效率高,并保证提供必要的输出力矩和输出速度,以满足机构动作的速度和承载能力的要求。
本次设计选用了两种型号的舵机(HGl4一M和MICR02BBMG)和一种直流电机(额定功率20W;电机自带减速箱的减速比100:1;连续转矩26.1mN·m)。
1.2仿人机器人的外形设计仿人机器人的硬件平台设计已完成,仿人机器人外形及其内部机械结构见图1。
图1仿人机器人外形及其内部机械结构1.3表情机器头的结构设计表情机器头的制作大致可分成4个步骤:①三维机械结构的设计,本设计采用了CAXA实体2006进行三维图设计;②机械结构的加工及装配,为了保证重量和强度的要求,大部分零件采用硬铝(I。
Y12)材料;③玻璃钢外壳及眼球、眼睑的安装固定;④硅胶外皮的制作安装,面部表情动作的制作安装,头发、睫毛、眉毛制作安装,眼球上色及脸部的化妆。
表情机器头的制作过程见图2,仿人机器人头部的具体自由度及选用电机见表1。
1.4腰部的机械结构设计腰部运动主要有2个自由度,一个是弯腰,一个是转腰,弯腰的运动范围是0。
~30。
,转腰的运动范围是±45。
,腰部自由度的实现都是由直流电机驱动。
腰收稿日期;2007.09.20I修回日期:2007—12—15作者简介,冯威(1980一),男,北京人,硕士研究生·研究方向:仿人机器人的行为控制研究。
万方数据2008年第2期冯威,等:26自由度仿人机嚣人的设计与控制·131·部零件主要有轴承座、轴承、轴、支架和板组成,材料主要选用Q235或45钢。
图2表情机器头的制作过程裘1机器人头部的具体自由度及选用电机部位运动机能自由度选用电机/数量眼球上下及左右转动4MICRO2BBMG/4台眼睑闭合、张开2MICRO2BBMG/2台眉头挑眉、皱眉2HGl4一M/2台嘴角左右嘴角的拉动2MICRO2BBMG/2台下颚张嘴、闭嘴lHGl4一M/1台颈部摇头、转头2HGl4一M/2台嘴唇说话时的嘴唇微动lHGl4一M/l台1.5手臂的机械结构设计本手臂的设计完全是按照人体的比例和自由度配置进行设计的,总共设计有10个自由度,每只手臂各有5个自由度,分别是肩部向前抬手臂(舵机1驱动)、大臂转动(舵机2驱动)、肩部侧向抬手臂(舵机3驱动)、肘部弯曲(舵机4驱动)、小臂转动(舵机5驱动)。
每只手臂忽略了2个腕部的自由度。
手臂共由10个舵机驱动,舵机全部选用HGl4一M,舵机的扭矩为1.32N·Ill,经计算满足手臂运动到各个位置的最大扭矩。
考虑减轻手臂的重量,零件所选材料均为硬铝。
该手臂的设计可以完成类似人手臂的各种动作姿势,仿人机器人手臂的动作和姿态见图3。
机驱动和运动控制等工作。
下位机的控制又分成舵机控制和直流电机控制两大部分。
一部分是手臂及头部的舵机控制系统,舵机的控制系统主要包括机器人的控制核心——PICl6F877单片机、数据存储模块、通信模块以及其它的硬件控制模块;另一部分是实现转腰、弯腰的直流电机控制系统。
图4机电系统的结构图3上位机软件的控制所谓上位机的控制系统,就是用PC机发出程序,完成对整个仿人机器人的引导和控制。
我们设计的PC端的软件必须具备如下功能:语音识别、机器人仿真、数据生成、数据通信和机器人初态补偿。
仿人机器人上位机控制软件由北京科技大学机器人研究课题小组独立开发,其作用是产生仿人机器人的动作数据,并对机器人的运动数据进行传输和编辑。
双击执行图标后,就会出现程序的主界面,见图5。
图3仿人机器人手臂的动作和姿势2仿人机器人机电系统的设计与实现仿人机器人的控制平台即机电系统是本文研究的硬件基础,整个机电系统采用了上、下位机结构,机电系统的结构见图4。
上位机实际上是一台可进行计算控制的PC机,主要优点是速度快,各种外部接口设备多,存储空间大。
上位机主要负责运算量大、计算复杂的图像处理、语音识别和语音合成工作。
下位机图5机器人调试上位机程序主界面采用性价比高的PICl6F877单片机电路板,上位机和控制软件的主界面可以分为几个区域模块,有菜下位机通过RS--232串口或者无线模块进行连接和单控制模块、速度控制模块、同步选择控制模块、舵通信。
下位机主要负责传感器信息接收及初级处理、电(下转第134页) 万方数据·134·机械工程岛自动化2008年第2期参考变献:[1]SendohM,IshiyamaK,AraiK.Fabricationofmagneticactuatorforincapsuleendoscope[J].1髓ETransactionsMagnetics,2003,39(5):3232-3234.[2]MANGENEV,KlNGSlEYDA,QUINNRD,etal。
Developmentofperistalticendoscope[C].InternationalConicfenceRoboticsand矗utomation。
WashingtonlEEE。
2002:347—352.[3]YamazakiA,SendohM,IshiyamaK.Fabricationofmicropumpwithspiral-typemagneticmicromachine心]。
Transactions0nMagnetics,2003,39(5):3289-3291.[4丁迟冬祥.颜国难。
林良明.熬子蚯蚓运渤原理的肠遒检查微小枧爨人内窥镜系统[J3.祝器人,2002,24(3):222—228。
Is]周银熊,贺惠农,顾大强,等.联用微型机器人光损伤体内驱动努法口]。
科举通报,1999。
44(20):2210—2213。
£艿】嚣镊煞,李立薪渍§衷裰。
一种颠餐熬徽型撬器夫窑]。
槐械工稳学报,2001,37(1):11.13.C7]PowellRL,AharonsonEF,SchwarzWH,eta1.RheologicalbehaviorofnormaltracheobronchialmuCUSofcanines[j】.JournalofAppliedPhysiology,1974,37(3):447—451.Is]湿诲铸,羹孚.瘁擦攀原理[M3。
筹2叛。
北寒;清华大学凄黢柱,2002.c9]郑庆林.摩擦学原璞[M].北京{高等教育出版社,1994.DriveStudyonaNewKindofMedicalMicro—·robotHUGuan-yul,HUZhong-wen:。
LIANGLian91(1.DepartmentofMechanical&ElectronicEngineering,ChangshaUniversity,Changsha410003,ChinaI2.ChinaUnitedEngineeringCorporation,Hangzhou310022,China)Abstract:Anewkindofmedicalmicro-robotworkinginsidethehumanbody’Slumenbloodvesselisintroduced.Theinfluencesofparametersofthismicro-robotthegeneratedaxialthrustforceandminimalmucusfilmthicknessanalyzedtheoretically。
Thusitisfavorableforthemicro-robotwhichmovesuspendedlyandquicklyinthehumanbody’Slumenandbloodvessel.Keywords:medicalmicro—robot;axiaithrustforce;minimalmucusfilmthickness—{—-H■-—●—H●H_●——■——+-书_—}——●-·—÷—-●—-—●—h■—·-÷——{·——-HH÷——●--—}——+—’■h_—}—-■·-—÷——{—--w__p——}——{--■-·—}qhom_■■—-●——{-·—}“-《-_■———--—■—-●-__卜--}——{-——}_H_*-q-—-●-—{·-却(I-接帮131页)规微渊控剖模块、数据发送控制模块、运动数据慰示模块戳及功藐控镄模块等。
袁蘩荸控裁模块孛有一个餐始位鬣设定的菜单,其中3个子菜单对应这个仿人机器人初始化位置控制的3个选项。
通过设置初始化位置这个子菜荸,就胃羧设嚣俦大税嚣入上电盖酶视婕化位鬣。
点击浏览按钮后,就可以把瑟加载的仿人机器人豹避动数据读取出来。
4缝论26自由度仿人机器人的整体设计、安装和调试工作已缝成功完成,并且该机器入耳前已在天津科技馆静橇嚣入与撬械展区震览。
遥过上、下位棍我弱霹以实现对机器人的面部表情动作和行为动作的控制,机器人接受我们发送的各种数据完成相应动作或表情,数据已经编辑成数据库并且不断扩充和延伸。