旅行商问题
np难问题的例子

NP难问题的例子
NP难问题是指那些在多项式时间内无法被解决的问题,它们通常被认为是计算机科学中的最难问题之一。
以下是一些著名的NP难问题的例子:
1. 旅行商问题(Traveling Salesman Problem,TSP):该问题的目标是找到一条最短路径,使得一个商人能够访问所有城市,并返回起点城市。
这个问题在实践中是非常复杂的,因为它涉及到很多因素,如城市之间的距离、商人的时间限制、交通拥堵等等。
尽管TSP是一个NP难问题,但在理论上是否存在一个多项式时间算法还是未知的。
2. 着色问题(House染色问题):该问题涉及到将房子涂成不同的颜色,以避免相邻房子颜色相同。
该问题在计算机图形学中具有重要应用,但也是一个NP难问题。
3. 子集问题(Subset Sum Problem):该问题是判断给定一组数是否存在一个子集,使得这些数的和等于给定的目标值。
这个问题也是一个NP难问题,尽管它可以在多项式时间内被近似解决。
4. 数独问题(Sudoku):数独是一种数字填充游戏,需要将一个9x9的网格填充为1到9的数字,使得每一行、每一列以及每一个子网格中的数字都不重复。
数独是一个NP 难问题,尽管它可以在多项式时间内被近似解决。
这些例子表明,尽管NP难问题在实践中具有重要的应用,但我们仍需要更多的研究来解决这些问题。
组合优化中的旅行商问题

组合优化中的旅行商问题组合优化问题是指在给定的集合或者结构中,寻找一个最优解或者一个近似最优解的问题。
而旅行商问题是组合优化中的一个经典问题,也是一个NP困难问题。
它的问题描述是:给定一些城市和它们之间的距离,求解一个最短路径,使得每个城市只经过一次,并且最后能够回到起始城市。
旅行商问题在实际生活中有着广泛的应用,比如物流配送、电路板布线、旅游路线规划等。
由于问题的复杂性,寻找解决该问题的最优算法一直是学术界和工业界的研究热点。
为了解决旅行商问题,已经提出了一系列的算法。
下面将介绍其中几种常见的算法。
1. 穷举法穷举法是最简单的解决旅行商问题的方法之一。
它的思想是对所有可能的路径进行穷举,计算路径的总长度,并选择其中最短的路径作为结果。
然而,由于旅行商问题的解空间巨大(复杂度是O(n!)),穷举法在问题规模较大时计算量会非常庞大,因此不适用于大规模问题。
2. 动态规划法动态规划法是另一种解决旅行商问题的常用方法。
它的思想是通过将问题分解成多个子问题,并利用子问题的最优解构造原问题的解。
具体来说,可以定义一个二维数组dp,其中dp[i][j]表示从城市i出发,经过集合j中的城市一次后,回到起始城市的最短路径长度。
通过动态规划的递推公式,可以求解出dp数组中的所有元素,从而得到整个问题的最优解。
3. 遗传算法遗传算法是一种基于生物进化和遗传机制的搜索算法。
它通过模拟生物进化过程中的选择、交叉和变异等操作,逐步优化解的质量。
在解决旅行商问题时,可以将每个可能的路径编码成一个染色体,并用适应度函数评估每个染色体的优劣。
然后通过选择、交叉和变异等操作,使得优秀的染色体得以传递下去,最终得到一个接近最优解的路径。
4. 其他启发式算法除了上述提及的算法,还有一些启发式算法常被用于解决旅行商问题,如蚁群算法、模拟退火算法和遗传算法等。
这些算法多为基于自然现象和启发式规则的搜索算法,可以有效地在大规模数据集上求解旅行商问题。
旅行商问题(TSP)

iS jS
除起点和终点外,各边不构成圈
xij
0, 1
(7 1) (7 2) (7 3)
5
0 8 5 9 12 14 12 16 17 22
8
0
9 15 17
8
11
18
14
22
5 9 0 7 9 11 7 12 12 17
9 15 7 0
lingo解决旅行商问题 model: sets: city/1..6/:u; link(city,city):dist,x; endsets data: dist=99999,702,454,842,2396,1196,
702,99999,324,1093,2136,764, 454,324,99999,1137,2180,798, 842,1093,1137,99999,1616,1857, 2396,2136,2180,1616,99999,2900, 1196,764,798,1857,2900,99999; enddata
C=v1,v2,…,vi,vj,…,vj-1,vi+1,vj+1,…,vm,v1 (3)C0C,重复步骤(2),直到条件不满足为止,最后得 到的C即为所求。
例对下图的K6,用二边逐次修正法求较优H圈.
较优H圈: 其权为W(C3)=192
分析: 这个解的近似程度可用最优H圈的权的下界与
其比较而得出.即利用最小生成树可得最优H圈的一个下界.
设C是G的一个最优H圈,则对G的任一顶点v, C-v是
G-v的生成树.如果T是G-v的最小生成树,且e1是e2与v关联
的边中权最小的两条边,则w(T)+w(e1)+w(e2)将是w(C)
智能优化-TSP-旅行商问题

智能优化实验报告基于遗传算法的TSP问题求解研究一、问题描述1、TSP问题的概述旅行商问题 (Traveling Salesman Problem,简称 TSP) 是一个经典的组合化问题。
它可以描述为:一个商品推销员要去若干个城市推销商品,从一个城出发需要经过所有城市后回到出发地,应如何选择行进路线以使总行程短。
从图论的角度看,该问题实质是在一个带权完全无向图中找一个权值最的小回路。
在寻找最短路径问题上,有时不仅要知道两个指定顶点间的最短路径,还需要知道某个顶点到其他任意顶点间的最短路径。
旅行商问题也是经典的组合数学的问题,生活中随处可见这类组合数学问题。
例如,计算下列赛制下的总的比赛次数:n个球队比赛,每队只和其他队比赛一次。
在纸上画一个网络,用铅笔沿着网络的线路走,在笔不离开纸面且不重复线路的条件下,一笔画出网络图。
一个邮递员从邮局出发,要走完他所管辖的街道,他应该选择什么样的路径,这就是著名的“中国邮递员问题”。
一个通调网络怎样布局最节省?美国的贝尔实验室和IBM公司都有世界一流的组合数学家在研究这个问题,这个问题直接关系到巨大的经济利益。
库房和运输的管理也是典型的组合数学问题,怎样安排运输使得库房充分发挥作用,进一步来说,货物放在什么地方最便于存取。
上述的这些例子中,其中一部分就和旅行商问题有关系。
2、TSP问题研究意义解决旅行商问题有着极其重要的理论和现实意义。
从理论层面来讲,解TSP不仅为其他算法提供了思想方法平台,使这些算法广泛地应用于各种组合优化问题;而且经常被用来测试算法的优劣,如模拟退火算法、禁忌搜索、神经网络、进化算法等,都可用旅行商问题来测试。
从实际应用层面来讲,旅行商问题作为一个理想化的问题,尽管多数的研究成果不是为了直接的应用,但却被广泛地转化为许多组合优化问题,最直接的就是其在交通、物流和大规模生产中的应用。
3、TSP问题的解决TSP问题是诸多领域内出现的多种复杂问题的集中概括和简化形式。
组合数学_旅行商问题

旅行商问题
1
问题描述 某售货员要到若干城市去推销商品,已知 各城市之间的路程(或旅费)。他要选定一 条从驻地出发,经过每个城市一次,最后 回到驻地的路线,使总的路程(或总旅费) 最小。
旅行商问题: 对正权完全图G,求G总长最短的H回路。
求解算法:分支限界算法
2
算法描述 旅行商问题的解空间是一个排列树。有两种实 现的方法。第一种是只使用一个优先队列,队 列中的每个元素 中都包含到达根的路径。另一 种是保留一个部分解空间树和一个优先队列, 优先队列中 的元素并不包含到达根的路径。以 下为第一种方法。
4
例
10 6
5
程序演示
6
运行结果
7
谢谢观看~~~
8
数学建模经典问题——旅行商问题

度最短的两条边之和; C*(T):最优回路长度;
25
于是,dmin(i, 1)代表与第i个结点关联的所有边 中最长边的长度,dmin_j(i, 1) 代表与第i个结点关联 的所有边中次长边的另一个结点编号(其中一个结点 编号为i),第i结点的dmin(i, k)和dmin_j(i, k)可由距 离矩阵w轻易求得。
20
当然,用该方法有时会找不到TSP的最优解, 因为很可能在进行了几轮迭代后,却找不到新的不 等式。Padborg与Hong曾计算了74个TSP,其中54 个得到了最优解,其余的虽未得到最优解,却得到 了很好的下界,如果与近似方法配合,可以估计近 似解的精确程度。如,他们解过一个有313个城市的 TSP,获得一个下界41236.46,而用近似方法能得 到一条长为41349的路线,于是可估计出所得近似解 与最优解的误差不超过0.26%。
14
早在1954年,Dantzig等人就曾提出过一种方 法(非多项式算法),并且求出了一个42城市的 TSP最优解。到了1960年代,不少人用分支定界法 解决了许多有几十个城市的TSP。还有人提出了一 些近似方法,也解决了许多有几十个城市甚至上百 个城市的TSP(有时找到的仅是近似解)。更值得 注意的是,从1970年代中期开始,Grotschel与 Padberg等人深入研究了TS多面体的最大面 (facet),并从所得结果出发获得了一种解TSP的 新算法,可以解决一些有100多个城市的TSP,且都 在不长的时间内找到了最优解。
一、数学模型 1. 标准TSP 旅行商问题(简称TSP),也称货郎担问题或 旅行推销员问题,是运筹学中一个著名的问题,其 一般提法为:有一个旅行商从城市1出发,需要到城 市2、3、…、n去推销货物,最后返回城市1,若任 意两个城市间的距离已知,则该旅行商应如何选择 其最佳行走路线
旅行商问题运筹学方法
旅行商问题运筹学方法我折腾了好久旅行商问题的运筹学方法,总算找到点门道。
说实话,刚开始接触旅行商问题的时候,我真是一头雾水。
就知道是要找一个旅行商经过所有城市并且最后回到起始城市的最短路线。
我一开始也是瞎摸索,想着把所有可能的路线都列举出来再比较长短不就得了。
但我很快就发现这根本行不通,城市数量稍微多一点,那可能的路线数量就像天文数字一样。
就好比你有10个城市,那可能的路线就有好多好多,我计算器都按不过来。
后来我就尝试用一些简单的启发式方法。
我记得我先试的是最近邻法。
这方法简单来说就像一个人很贪心一样,从起始城市出发,每一步都去离当前城市最近的没去过的城市。
但是这个方法有很大的缺陷。
有一次我用它来模拟一个比较复杂的城市网络布局的时候,得到的路线远不是最短的,因为它很容易就走进死胡同,只看到眼前的利益,而忽略了整体的规划。
再后来呢,我又了解到了节约算法。
这个算法就有点像是把局部的小节约累积成一个大的节约。
把两个城市看成一组,计算合并它们为一个行程可以节省多少路程,如果节省得多就把它们安排在一起。
这样一步一步地优化整个行程。
不过这个方法也不是完美的,它计算起来有时候也挺复杂,而且有可能在某些特殊布局下也得不到最优解。
我还试过蚁群算法,这算法挺有意思的,它是模拟蚂蚁找食物的过程。
每只蚂蚁在路上留下信息素,别的蚂蚁就根据信息素的浓度来选择路径,浓度越高就越有可能选择。
就像我们找美食,哪里人多我们就觉得哪里好吃的可能性大。
但是这个算法有个难点就是参数的设置。
我一开始不确定怎么设置那些参数,什么信息素挥发率之类的,就随便设了个值,结果得到的结果也不是很好,甚至有时候根本就不收敛,就一直在那绕圈子似的找路线。
到目前我觉得最好的方法就是把多种方法结合起来。
比如先用最近邻法快速得到一个初始解,然后再用节约算法或者其他方法在这个初始解的基础上进行优化。
这样既能快速得到一个解,又有可能接近最优解。
这就好比我们搭积木,先大致搭一个形状,然后再调整细节。
基于图论的旅行商问题求解算法研究

基于图论的旅行商问题求解算法研究1. 引言旅行商问题(Traveling Salesman Problem,简称TSP)是计算机科学中的经典问题,属于组合优化问题的范畴。
其基本思想是在给定的一组城市以及它们之间的距离或成本数据的情况下,找到一条最短的路径,使得路径经过每个城市且仅经过一次,最终回到起点城市。
2. 图论基础在研究旅行商问题之前,我们需要了解图论的基本概念。
图由节点(顶点)和边(连接节点的线段)组成。
对于旅行商问题,我们可以将每个城市视为一个节点,城市之间的距离视为边的权重。
3. 穷举法穷举法是最简单、最直接的求解方法。
它列举了所有可能的路径,并计算每条路径的总长度,最后选择最短的路径作为最优解。
然而,随着城市数量的增加,穷举法的复杂度呈指数级增长,因此对于大规模的问题来说,穷举法的效率非常低下。
4. 最小生成树法最小生成树法(Minimum Spanning Tree, MST)将图中的所有节点通过边连接起来,形成一棵树。
通过对最小生成树进行遍历,我们可以得到一条经过每个节点且最短的路径。
然而,最小生成树法并不能得到最优解,因为它忽略了必须回到起始城市的约束。
5. 动态规划法动态规划法是一种常用的求解旅行商问题的方法。
它基于以下两个关键思想:子问题最优性和子问题重叠性。
动态规划法通过对问题进行逐步分解,将大问题划分为较小的、重复的子问题。
通过求解子问题并利用子问题之间的关系,最终可以得到问题的最优解。
具体到旅行商问题,我们可以使用动态规划来求解。
6. 遗传算法遗传算法是一种基于自然界进化规律的启发式算法,常用于解决复杂的组合优化问题。
它通过构造一个种群,每个个体代表一种可行解,并通过模拟自然选择、交叉和变异等遗传操作来逐代进化种群。
最终,进化到一定代数时,得到的个体就是问题的近似最优解。
在求解旅行商问题时,我们可以使用遗传算法来搜索解空间,并不断优化路径的长度。
7. 蚁群算法蚁群算法受到蚂蚁找食物行为的启发,通过模拟蚂蚁在搜寻食物时的行为来求解优化问题。
旅行商问题的应用场景

旅行商问题的应用场景旅行商问题,这个听起来有点儿高大上的名词,其实就是在说“怎么能让一个商人走遍一圈城市,最后回到起点,且尽量少花时间或钱”的问题。
哎,听起来简单,但这可不是随便说说的事儿。
在咱们生活中,这个问题其实大有用处。
接下来就让咱们来聊聊旅行商问题的几个应用场景。
1. 快递物流的“飞毛腿”1.1 大家都在等快递想象一下,你在网上买了新衣服,心里美滋滋的等着快递小哥送货上门。
但要知道,快递小哥可不是单打独斗,他背后可是有一套严密的计划在支撑。
旅行商问题在这里就大显身手了!快递公司需要确保每个包裹能尽快送到每一个客户手中,而这就需要一个最优路线来减少时间和成本。
1.2 如何规划路线比如说,如果快递小哥今天要送的包裹分布在五个不同的地点,那么他就得计算出从一个地方到另一个地方的最短距离,这样才能把时间花在刀刃上。
为了让你尽快收到快递,快递公司可真是下足了功夫,计算每一条线路的优劣,真是个“走路带风”的角色啊。
2. 旅游行程的精打细算2.1 你想去哪里?旅游可是一项快乐的投资,但如果不提前做好功课,最后可能会被“拖后腿”。
旅行商问题在这里也能帮你大忙。
你计划去几个城市,想在有限的时间里玩得尽兴,怎么才能把这些景点串联起来,减少路上的折腾呢?2.2 从此告别“走马观花”比如,你打算去北京、上海和广州,想要在每个城市都吃到地道美食,逛到最有意思的景点。
那你可得好好规划一下行程,避免在城市间“来回跑”。
这样,你才能做到“有条不紊”,不至于搞得自己像个无头苍蝇,东奔西跑,最后却啥也没体验到。
旅行商问题就像是你行程中的“导航仪”,帮你找到最佳路线,事半功倍。
3. 数据中心的“智能调度”3.1 现代科技的背后现代社会,咱们离不开互联网,数据中心也是运转的核心。
数据中心需要处理大量的信息,而如何让这些信息在不同的服务器之间高效传递,就是旅行商问题又一显身手的地方。
3.2 不再让“数据堵车”想象一下,网络上的数据就像车流,合理的调度能避免“数据堵车”的现象。
旅行商问题
旅行商问题旅行商问题(Traveling Saleman Problem,TSP)又译为、,简称为,是最基本的路线问题,该问题是在寻求单一旅行者由起点出发,通过所有给定的需求点之后,最后再回到原点的最小路径成本。
最早的旅行商问题的数学规划是由Dantzig(1959)等人提出。
目录1简介“旅行商问题”常被称为“”,是指一名推销员要拜访多个地点时,如何找到在拜访每个地点一次后再回到起点的最短路径。
规则虽然简单,但在地点数目增多后求解却极为复杂。
以42个地点为例,如果要列举所有路径后再确定最佳行程,那么总路径数量之大,几乎难以计算出来。
多年来全球数学家绞尽脑汁,试图找到一个高效的TSP问题在物流中的描述是对应一个物流配送公司,欲将n个客户的订货沿最短路线全部送到。
如何确定最短路线。
TSP问题最简单的求解方法是。
它的解是多维的、多局部极值的、趋于无穷大的复杂解的空间,搜索空间是n个点的所有排列的集合,大小为(n-1)。
可以形象地把看成是一个无穷大的丘陵地带,各山峰或山谷的高度即是问题的极值。
求解TSP,则是在此不能穷尽的丘陵地带中攀登以达到山顶或谷底的过程。
2研究历史旅行商问题字面上的理解是:有一个推销员,要到n个城市推销商品,他要找出一个包含所有n个城市的具有最短路程的环路。
TSP的历史很久,最早的描述是1759年欧拉研究的骑士周游问题,即对于棋盘中的64个方格,走访64个方格一次且仅一次,并且最终返回到起始点。
TSP由RAND公司于1948年引入,该公司的声誉以及线性规划这一新方法的出现使得TSP成为一个知名且流行的问题。
3问题解法旅行推销员的问题,我们称之为巡行(Tour),此种问题属于的问题,1、途程建构法(Tour Construction Procedures)从中产生一个近似最佳解的途径,有以下几种解法:2、途程改善法(Tour Improvement Procedure)先给定一个可行途程,然后进行改善,一直到不能改善为止。
TSP的几种求解方法及其优缺点
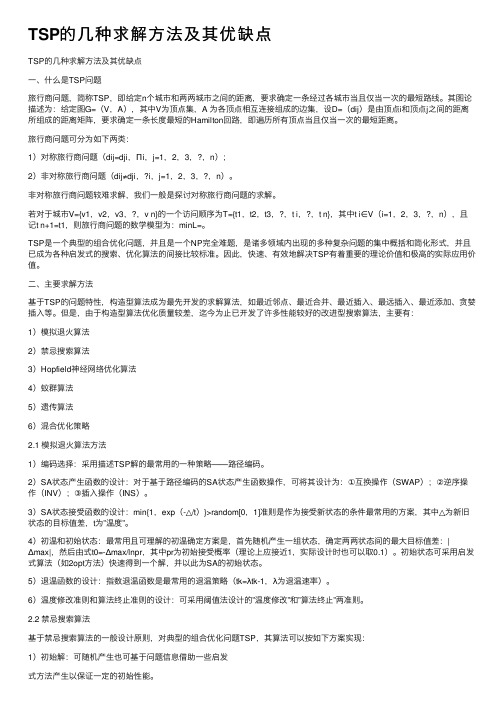
TSP的⼏种求解⽅法及其优缺点TSP的⼏种求解⽅法及其优缺点⼀、什么是TSP问题旅⾏商问题,简称TSP,即给定n个城市和两两城市之间的距离,要求确定⼀条经过各城市当且仅当⼀次的最短路线。
其图论描述为:给定图G=(V,A),其中V为顶点集,A 为各顶点相互连接组成的边集,设D=(dij)是由顶点i和顶点j之间的距离所组成的距离矩阵,要求确定⼀条长度最短的Hamilton回路,即遍历所有顶点当且仅当⼀次的最短距离。
旅⾏商问题可分为如下两类:1)对称旅⾏商问题(dij=dji,Πi,j=1,2,3,?,n);2)⾮对称旅⾏商问题(dij≠dji,?i,j=1,2,3,?,n)。
⾮对称旅⾏商问题较难求解,我们⼀般是探讨对称旅⾏商问题的求解。
若对于城市V={v1,v2,v3,?,v n}的⼀个访问顺序为T={t1,t2,t3,?,t i,?,t n},其中t i∈V(i=1,2,3,?,n),且记t n+1=t1,则旅⾏商问题的数学模型为:minL=。
TSP是⼀个典型的组合优化问题,并且是⼀个NP完全难题,是诸多领域内出现的多种复杂问题的集中概括和简化形式,并且已成为各种启发式的搜索、优化算法的间接⽐较标准。
因此,快速、有效地解决TSP有着重要的理论价值和极⾼的实际应⽤价值。
⼆、主要求解⽅法基于TSP的问题特性,构造型算法成为最先开发的求解算法,如最近邻点、最近合并、最近插⼊、最远插⼊、最近添加、贪婪插⼊等。
但是,由于构造型算法优化质量较差,迄今为⽌已开发了许多性能较好的改进型搜索算法,主要有:1)模拟退⽕算法2)禁忌搜索算法3)Hopfield神经⽹络优化算法4)蚁群算法5)遗传算法6)混合优化策略2.1 模拟退⽕算法⽅法1)编码选择:采⽤描述TSP解的最常⽤的⼀种策略——路径编码。
2)SA状态产⽣函数的设计:对于基于路径编码的SA状态产⽣函数操作,可将其设计为:①互换操作(SWAP);②逆序操作(INV);③插⼊操作(INS)。
旅行商问题分支限界法

旅行商问题分支限界法旅行商问题是旅行商在走遍所有城市并回到起点城市的问题,其中要求路线最短。
该问题是非常常见并且难以解决的数学问题,因为需要考虑的变数非常多,所以无法直接使用贪心算法等简单的算法进行处理。
目前,最有效的算法是分支限界法,接下来我们将介绍该算法的详细步骤。
1. 状态空间树的构建首先,需要将旅行商问题转化为状态空间树。
该过程是指以起点为根节点,生成所有可能的路线作为子节点,直到达到所有可能路线的叶节点处。
该过程中需要考虑的主要是如何选择下一个城市,因为需要保证路线最短,所以需要综合考虑已经走过的路程、未来可能要走的路程以及所有可能路线的总长度等因素进行选择。
2. 最优解的判断在状态空间树中,需要不断地更新当前的最优解。
这是可以使用一个变量进行记录,并与其他路线的长度进行比较,只要某条路线的长度已经超过了当前最优解,则可以直接剪枝。
这样可以大大缩短算法运行时间,同时可以避免不必要的计算。
3. 分支限界法的应用在上述步骤中,我们已经得到了一个状态空间树,并且已经筛选出了当前最优解。
接下来就是分支限界法的应用了。
该算法的核心思想是在树的分支中设置优先级队列,以深度优先搜索方式去遍历所有可能的路线,同时使用一个优先级队列来存储每个分支的下限,只需要将长度大于下限的分支进一步拓展,可以大大提高算法的效率。
4. 全局最优解的汇总最后,将每条路径的长度进行求和,并找出所有路径中最短的一条作为全局最优解。
由于使用了分支限界法,可以保证输出的解是全局最优解,因此无需再进行进一步的调整。
总之,旅行商问题是一类典型的优化问题,需要综合考虑多种因素来找出最优解。
分支限界法作为一种最有效的解决方法,可以大大提高算法的求解效率。
以上是旅行商问题分支限界法的详细步骤。
TSP的几种求解方法及其优缺点

TSP的几种求解方法及其优缺点旅行商问题(TSP)是一个组合优化问题,目的是找到一条最短的路径,使得旅行商能够访问一系列城市并返回起始点。
TSP由于其复杂性而被广泛研究,已经发展出了许多求解方法。
本文将讨论几种主要的TSP求解方法,包括贪婪算法、局部算法、遗传算法和蚁群算法,并分析它们的优缺点。
1.贪婪算法贪婪算法是一种基于贪心策略的求解方法。
它从一个起始城市开始,每次选择距离当前城市最近的未被访问过的城市作为下一步的目标城市,直到所有的城市都被访问过。
贪婪算法的优点是简单易于理解和实现,并且在处理小规模问题时效果显著。
然而,贪婪算法没有考虑全局最优解,很容易陷入局部最优解,不能保证找到最优解。
2.局部算法局部算法是一类启发式算法,它通过不断优化当前解来逐步接近最优解。
其中最典型的是2-opt算法,它通过交换路径中的两个顶点位置来改进解的质量。
局部算法的优点是可以找到局部最优解,且计算时间较短。
然而,局部算法容易陷入局部最优解,而且计算开销随问题规模增加而增加,且不能保证找到全局最优解。
3.遗传算法遗传算法是一种模拟生物进化的随机算法。
它通过模拟遗传、交叉和变异等基因操作来生成和改进解。
遗传算法的优点是可以处理大规模问题,且不容易陷入局部最优解。
同时,遗传算法能够在空间中探索多个解,提高解的多样性。
然而,遗传算法的计算开销相对较高,需要大量的迭代和种群更新。
此外,遗传算法的性能与参数设置相关,需要进行调整。
4.蚁群算法蚁群算法是一种模拟蚂蚁觅食行为的算法。
它通过模拟蚂蚁在路径上释放信息素的过程,来引导蚂蚁选择路径。
蚁群算法的优点是能够找到较好的解并具有一定的自适应性。
它适用于处理大规模问题,且能够处理问题中的不确定性。
然而,蚁群算法的计算开销较高,并且参数设置对结果影响较大。
综上所述,TSP的求解方法包括贪婪算法、局部算法、遗传算法和蚁群算法等。
每种方法都有自己的优点和缺点。
选择适合问题规模、问题特征和求解时间的方法是关键。
旅行商问题描述

设城市数量为n,则有
( n 1)! 2
条不同路径。
算法的复杂程序呈指数增加。城市数量越多,所需的计算时 间成本越大,当城市数量无穷多时,则不可能被计算出来。 例:当n=20,路径数有1.2×1018 ,即使每秒列举1亿条路径, 需350年才能全部列出。
二、近似算法
• 1、路径构建法: 从距离矩阵中产生一个近似最佳解的途径,有以下几种解法: (1)最近邻点法:一开始以寻找离场站最近的需求点为起始路线 的第一个顾客,此后寻找离最后加入路线的顾客最近的需求点,直到 最后。 (2)节省法:以服务每一个节点为起始解,根据三角不等式两边 之和大于第三边之性质,其起始状况为每服务一个顾客后便回场站, 而后计算路线间合并节省量,将节省量以降序排序而依次合并路线, 直到最后。 (3)插入法:如最近插入法、最省插入法、随意插入法、最远插 入法、最大角度插入法等。 • 2、路径优化法:先产生一条初始巡回路径,再改变其中某些车市的 顺序,使路径优化,逐渐接近最优解。 • 3、智能算法
3、智能算法
• 至今没有找到多项式时间算法解(无法用一个确定的公式 来求解)的一类问题,但问题的所有可能答案,都是可以 在多项式时间内计算得出并进行正确与否的验算。
应用
1、印刷电路版的走刀问题 2、车间调度、电网配线 3、交通运输:航线安排、物流配送
求解算法:
一、精确算法—穷举法 • 旅行商问题实际上是一个排列组合问题。穷举法:将所有 的可能路线全部求出,通过比较找到全局最优解,但计算 量在顶点数稍微多一点情况下,这时由于可行解太多,而 使算法不可行。
旅行商问题是一个典型的组合优化问题,也是一个典型的 NPC问题。 该问题的可行解是所有顶点的全排列,随着顶点数的增加,会产生组合 爆炸。 以42个地点为例:
旅行商问题

1、途程建构法(TourConstructionProcedures)
从距离矩阵中产生一个近似最佳解的途径,有以下几种解法:
获得最优路径的贪心法应一条边一条边地构造这棵树。根据某种量度来选择将要计入的下一条边。最简单的 量度标准是选择使得迄今为止计入的那些边的成本的和有最小增量的那条边。
应用
旅行商问题具有重要的实际意义和工程背景。它一开始是为交通运输而提出的,比如飞机航线安排、送邮件、 快递服务、设计校车行进路线等等。实际上其应用范围扩展到了许多其他领域.下面举几个实例。
采用FIFO分支限界法,分支限界法是在生成当前E-结点全部儿子之后再生成其它活结点的儿子,且用限界函 数帮助避免生成不包含答案结点子树的状态空间的检索方法。在总的原则下,根据对状态空间树中结点检索的次 序的不同又将分支限界设计策路分为数种不同的检索方法。在求解旅行商问题时,程序中采用FIFO检索(First In First Out),它的活结点表采用一张先进先出表(即队列)。可以看出,分支限界法在两个方面加速了算法 的搜索速度,一是选择要扩展的节点时,总是选择选择一个最小成本的结点,尽可能早的进入最有可能成为最优 解的分支;二是扩展节点的过程中,舍弃导致不可行解或导致非最优解的子结点。
研究历史
最早的旅行商问题的数学规划是由Dantzig(1959)等人提出,并且是在最优化领域中进行了深入研究。许 多优化方法都用它作为一个测试基准。尽管问题在计算上很困难,但已经有了大量的启发式算法和精确方法来求 解数量上万的实例,并且能将误差控制在1%内。
TSP的研究历史很久,最早的描述是1759年欧拉研究的骑士环游问题,即对于国际象棋棋盘中的64个方格, 走访64个方格一次且仅一次,并且最终返回到起始点。1954年,Geo~eDanzig等人用线性规划的方法取得了旅行 商问题的历史性的突破——解决了美国49个城市的巡回问题。这就是割平面法,这种方法在整数规划问题上也广 泛应用。后来还提出了一种方法叫做分枝限界法,所谓限界,就是求出问题解的上、下界,通过当前得到的限界 值排除一些次优解,为最终获得最优解提示方向。每次搜索下界最小的分枝,可以减小计算量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
算法设计与分析实验报告实验三旅行商问题院系:班级:计算机科学与技术学号:姓名:任课教师:成绩:湘潭大学2016年5月实验三旅行商问题一. 实验内容分别编程实现回溯法和分支限界法求TSP问题的最优解,分析比较两种算法的时间复杂度并验证分析结果。
二.实验目的1、掌握回溯法和分支限界法解决问题的一般步骤,学会使用回溯法和分支限界法解决实际问题;2、理解回溯法和分支限界法的异同及各自的适用范围。
三. 算法描述旅行商问题的回溯法算法可描述如下:Template <class Type>Class Traveling{friend Type TSP(int ** , int[],int ,Type);Private;Void Backtrack(int i);Int n, //图G的顶点数*x; //当前解*bestx; //当前最优解Type **a, //图G的邻接矩阵cc, //当前费用bestc, //当前最优解NoEdge; //无边标记};Template <class Type>Void Traveling<Type> : : backtrack(int i){if(i ==n){if(a[x[n-1]][x[n]]!=NoEdge&&a[x[n]][1]!=NoEdge&&(cc+a[x[n-1]][x[n]]+a[x[n]][1] +a[x[n]][1]<bestc || bestc == NoEdge)){for(int j = 1;j<=n;j++) bestx[j] = x[j];bestc == cc + a[x[n-1]][x[n]]+a[x[n]][1]};}else{For (int j = i;j<= n;j++)//是否可进入x[j]子树?If(a[x[i-1]][x[j]] != NoEdge &&(cc+a[x[i-1]][x[j]] < bestc || bestc == NoEdge)){//搜素子树Swap(x[i],x[j]);cc += a[x[i-1]][x[i]];Backtrack(i + 1);cc -= a[x[i-1]][x[i]];Swap(x[i],x[j]);}}}Template<class Type>Type TSP(Type**a, int v[], int n, Type NoEdge){Traveling<Type> Y;//初始化YY.x = new int [n+1];//置x为单位排列For(int i = 1;i <= n;i++)Y.x[i] = i;Y.a = a;Y.n = n;Y.bestc = NoEdge;Y.bestx = v; = 0;Y.NoEdge = NoEdge;//搜索x[2:n]的全排列Y.Backtrack(2);Delete[]Y.x;Return Y.bestc;}算法效率:如果不考虑更新bestx所需的计算时间,则Backtrack需要O((n-1)!)计算时间。
由于算法Backtrack在最坏情款下可能需要更新当前最优解O((n-1)!)次,每次更新需O(n)计算时间,从而整个算法的计算时间复杂性为O(n!)。
旅行商问题的分支界限法算法可描述如下:使用优先队列来存储活节点,优先队列中的每个活节点都存储从根到该活节点的相应路径。
具体算法可描述如下:Template<class Type>Class MinHeapNode{firend Traveling<Type>;Public:Operator Type() const {return lcost;}Private:Type lcost, //子树费用的下界cc, //当前费用rcost; //x[s:n-1]中定点最小出边费用和Int s, //根节点到当前节点的路径为x[0:s]*x; //需要进一步搜索的顶点是x[s+1:n-1]};四. 算法实现源程序代码/*回溯法*/#include<stdio.h>#include<time.h>#define N 5double cc,//当前路径费用bestc;//当前最优解费用double a[N+1][N+1];//邻接矩阵,存放图的信息int bestx[N+1];//当前最优解int x[N+1];//当前解void inputAjac(){int i,j;for(i=1;i<=N;i++){ for(j=i+1;j<=N;j++){printf("请输入第%d个城市到第%d个城市所需路费为:",i,j);scanf("%lf",&a[i][j]);a[j][i]=a[i][j];}}}void backtrack(int i){if(i==N){if(a[x[N-1]][x[N]]>0.0&&a[x[N]][x[1]]>0.0){if(bestc<0.0||bestc>cc+a[x[N-1]][x[N]]+a[x[N]][x[1]]){int j;for(j=1;j<=N;j++){bestx[j]=x[j];bestc=cc+a[x[N-1]][x[N]]+a[x[N]][x[1]];}}}}else{int j;for(j=i;j<=N;j++){if(a[x[i-1]][x[j]]>0.0){if(bestc<0.0||bestc>cc+a[x[i-1]][x[j]]+a[x[j]][x[1]]){int temp;cc+=a[x[i-1]][x[j]];temp=x[i];x[i]=x[j];x[j]=temp;backtrack(i+1);temp=x[i];x[i]=x[j];x[j]=temp;cc-=a[x[i-1]][x[j]];}}}}}double tsp(){int i;for(i=1;i<=N;i++){x[i]=i;}cc=0.0,bestc=-1.0;inputAjac();backtrack(2);return bestc;}void output(){int i;for(i=1;i<=N;i++){printf("%4d",bestx[i]);}// printf("\n");}void main(){double start,finish;start=clock();//取开始时间printf("城市个数:5\n");printf("走%d个城市最少路费为:%lf\n",N,tsp());printf("路径:");output();printf(" 1\n");finish=clock();printf("所需时间 %f ms\n",(finish-start));}/*分支界限法*/#include <stdio.h>#include <istream>#include<time.h>using namespace std;#define MAX_CITY_NUMBER 10#define MAX_COST 10000000int City_Graph[MAX_CITY_NUMBER][MAX_CITY_NUMBER];int City_Size;int Best_Cost;int Best_Cost_Path[MAX_CITY_NUMBER];typedef struct Node {int lcost;int cc;int rcost;int s;int x[MAX_CITY_NUMBER];struct Node* pNext;} Node;typedef struct MiniHeap {Node* pHead;} MiniHeap;void InitMiniHeap(MiniHeap* pMiniHeap) { pMiniHeap->pHead = new Node;pMiniHeap->pHead->pNext = NULL;}void put(MiniHeap* pMiniHeap,Node node) { Node* next;Node* pre;Node* pinnode = new Node;pinnode->cc = ;pinnode->lcost = node.lcost;pinnode->pNext = node.pNext;pinnode->rcost = node.rcost;pinnode->s = node.s;pinnode->pNext = NULL;for(int k=0; k<City_Size; k++) {pinnode->x[k] = node.x[k];}pre = pMiniHeap->pHead;next = pMiniHeap->pHead->pNext;if(next == NULL) {pMiniHeap->pHead->pNext = pinnode;} else {while(next != NULL) {if((next->lcost) > (pinnode->lcost)) {pinnode->pNext = pre->pNext;pre->pNext = pinnode;break;}pre = next;next = next->pNext;}pre->pNext = pinnode;}}Node* RemoveMiniHeap(MiniHeap* pMiniHeap) {Node* pnode = NULL;if(pMiniHeap->pHead->pNext != NULL) {pnode = pMiniHeap->pHead->pNext;pMiniHeap->pHead->pNext = pMiniHeap->pHead->pNext->pNext;}return pnode;}void Traveler() {int i,j;int temp_x[MAX_CITY_NUMBER];Node* pNode = NULL;int miniSum;int miniOut[MAX_CITY_NUMBER];MiniHeap* heap = new MiniHeap;InitMiniHeap(heap);miniSum = 0;for (i=0; i<City_Size; i++) {miniOut[i] = MAX_COST;for(j=0; j<City_Size; j++) {if (City_Graph[i][j]>0 && City_Graph[i][j]<miniOut[i]) { miniOut[i] = City_Graph[i][j];}}if (miniOut[i] == MAX_COST) {Best_Cost = -1;return ;}miniSum += miniOut[i];}for(i=0; i<City_Size; i++) {Best_Cost_Path[i] = i;}Best_Cost = MAX_COST;pNode = new Node;pNode->lcost = 0;pNode->cc = 0;pNode->rcost = miniSum;pNode->s = 0;pNode->pNext = NULL;for(int k=0; k<City_Size; k++) {pNode->x[k] = Best_Cost_Path[k];}put(heap,*pNode);while(pNode != NULL && (pNode->s) < City_Size-1) {for(int k=0; k<City_Size; k++) {Best_Cost_Path[k] = pNode->x[k] ;}if ((pNode->s) == City_Size-2) {int edge1 =City_Graph[(pNode->x)[City_Size-2]][(pNode->x)[City_Size-1]];int edge2 =City_Graph[(pNode->x)[City_Size-1]][(pNode->x)[0]];if(edge1 >= 0 && edge2 >= 0 && (pNode->cc+edge1+edge2) <Best_Cost) {Best_Cost = pNode->cc + edge1+edge2;pNode->cc = Best_Cost;pNode->lcost = Best_Cost;pNode->s++;}} else { for (i=pNode->s; i<City_Size; i++) { if(City_Graph[pNode->x[pNode->s]][pNode->x[i]] >= 0) {int temp_cc = pNode->cc+City_Graph[pNode->x[pNode->s]][pNode->x[i]];int temp_rcost = pNode->rcost-miniOut[pNode->x[pNode->s]];if (temp_cc+temp_rcost<Best_Cost) {for (j=0; j<City_Size; j++) {temp_x[j]=Best_Cost_Path[j];}temp_x[pNode->x[pNode->s+1]] =Best_Cost_Path[i];temp_x[i] = Best_Cost_Path[pNode->s+1];Node* pNextNode = new Node;pNextNode->cc = temp_cc;pNextNode->lcost = temp_cc+temp_rcost;pNextNode->rcost = temp_rcost;pNextNode->s = pNode->s+1;pNextNode->pNext = NULL;for(int k=0; k<City_Size; k++) {pNextNode->x[k] = temp_x[k];}put(heap,*pNextNode);delete pNextNode;}}}}pNode = RemoveMiniHeap(heap);}}int main() {double start,finish;start=clock();int i,j;printf("城市个数:");scanf("%d",&City_Size);for(i=0; i<City_Size; i++) {printf("请分别输入每个城市与其它城市的路程花费:");for(j=0; j<City_Size; j++) {scanf("%d",&City_Graph[i][j]);}}Traveler();printf("最少路费:""%d\n",Best_Cost);finish=clock();printf("所需时间: %f ms\n",(finish-start));return 1;}五.程序运行结果回溯法结果截图:分支界限法结果截图:六.实验结果分析回溯法算法的时间复杂度为O(n!),分支界限发算法的时间复杂度为O(2^n);从实验结果也可看出分支界限法所需时间少很多。