主机遥控系统实例精品
2-09 遥控系统实例
湖南工业职业技术学院电气工程系
7
第2章 CRT电视技术 章 电视技术
3.红外遥控接收电路 3.红外遥控接收电路
红外光信号由CX20106A①脚外接的红外光电二极管接收后变为电信号, 由集成电路内部前置放大、限幅、带通滤波、检波得到遥控编码脉冲,经整 形后从集成块⑦脚输出,直接送微处理器M50436-560SP M50436M50436 560SP⑤脚遥控信号接收端。
湖南工业职业技术学院电气工程系
11
第2章 CRT电视技术 章 电视技术
6. 模拟量控制
②脚:音量控制 调cpu ①脚对地电阻 V913相当于可变电阻 ③脚:色饱和度控制 调cpu ⑦脚电压 ④脚:亮度控制 调cpu ④ 脚电压 以64级脉冲宽度调 级脉冲宽度调 制(PWM)信号,经 )信号, 外接的低通滤波器电路, 外接的低通滤波器电路 变成直流控制电压去控 制
湖南工业职业技术学院电气工程系
12
第2章 CRT电视技术 章 电视技术 为反相放大器; (1)亮度控制④:反向控制, V914为反相放大器; 亮度控制④ 反向控制, V914为反相放大器
按“+”→4脚电压↓→VT914通少→输出电压↑→TA7698脚4电压↑→亮度 ↑
相当于一只可变电阻; (2)音量控制②:正向控制, VT913相当于一只可变电阻; 音量控制② 正向控制, VT913相当于一只可变电阻
湖南工业职业技术学院电气工程系
15
第2章 CRT电视技术 章 电视技术
调谐电压输出( (2)调谐电压输出(①脚)
14bit的调谐电压数据经CPU内部D/A 14bit的调谐电压数据经CPU内部D/A 转换器转换 的调谐电压数据经CPU内部 成脉宽调制(PWM)信号后从① 脚输出, V912倒相 成脉宽调制(PWM)信号后从① 脚输出,经V912倒相 放大及三级低通滤波,变换成高频调谐器所需要的0 放大及三级低通滤波,变换成高频调谐器所需要的0~ 30V直流调谐电压。 30V直流调谐电压。 直流调谐电压 向上选台(或自动搜索选台) 向上选台(或自动搜索选台)→1脚电压 ↓→VT912导通少→输出电压( VT912导通少 30V)↑→高频头 ↓→VT912导通少→输出电压(0~30V)↑→高频头 内变容二极管容量↓→振荡频率↑→ ↓→振荡频率↑→低频道向高频 内变容二极管容量↓→振荡频率↑→低频道向高频职业技术学院电气工程系
AUTOCHIEF+C20主机遥控系统
AUTOCHIEF C20主机遥控系统用于MAN B&W MC主机、定距桨船舶1 引言2 功能叙述2.1 遥控系统功能叙述Kongsberg 公司的C20船舶自动控制系统包含了AutoChief C20 推进控制系统。
模块化的设计使得按照单独的需求组态成系统十分便利,覆盖了从标准的推进系统结构到先进的双主机或四台主机系统的整个范围,并允许高速、中速和低速主机与减速机构、换向齿轮或可变螺旋桨相连。
AutoChief C20系统可以是由其它子系统组成的综合船舶控制系统的一个部分,这些子系统包括:• 报警和监视系统;• 辅助控制系统;• 电力管理系统;• 压载水自动控制系统• HVAC (空调)系统• 管理支持系统系统基于Kongsberg 公司的船用标准自动化概念:用标准模块组成系统,并采用CAN总线和局域网实现通信。
C20系统对于所有类型的船舶都是可以组态的。
AutoChief C20主机遥控系统通过在桥楼的组合式车钟和操纵杆进行控制。
通过移动操纵杆,系统将能自动地起动、换向、停车和转速设定。
AutoChief C20推进控制系统的主要组成部件包括:• 控制屏• 遥控系统• 车钟系统• 主机安全系统• 数字调速器系统• 操纵记录仪• 分布式处理单元系统在硬件和软件方面都集中了当前的最新技术。
2.2 AutoChief Control Panel (ACP)控制屏ACP的设计便于操作,简单地使用多功能控制器,可以提供进入所有系统的途径。
仅在需要的时候才提供所需要的信息,从而保持操作的简单性。
彩色显示器用图形方式提供重要信息以便于理解。
用户设计的MIMIC图可以适用于各种机型。
所有主要的变量,诸如转速、起动空气和扫气压力、主机状态等总能得到显示。
功能Wrong Way 车向错误Bump-Less Control Transfer 无扰动转换Canceling of shut down/slow down 取消shut down/slow downAlarm ackn/sound off 报警应答/消声Changing of parameter 参数的修改指示转速和设定转速;起动空气压力主机的当前状态起动阻塞Shut Down/Slow Down控制位置通用报警指示车向错误报警2.2.1 显示ACP显示器用来作为操作者和系统之间的主要接口。
武汉理工大学轮机自动化船舶主机遥控系统PPT课件

凸轮
精密调压阀
图9-3-2 气动遥控车钟原理
第三节 车钟系统及操纵部位的转换
二、主车钟发讯原理 1、气动遥控车钟
两位三通阀
精密调压阀
两位三通阀
图9-3-2 气动遥控车钟原理及 逻辑符号图
第三节 车钟系统及操纵部位的转换
2、电动遥控车钟
(a)
(b)
图9-3-3 指令发送器结构原理和输出特性曲线
第三节 车钟系统及操纵部位的转换
二、车钟系统组成及操纵部位的转换
Joystick
INC AH S T O P
INC AS
Port Wing
Engine telegraph System
Remote Control System
Bridge Room
Joystick
INC AH S T O P
INC AS
1)停油条件
控制主机停油有以下几种情况: 车令与凸轮轴位置不一致,换向停油YRL; 车令与主机转向不一致,制动停油YBL; 停车指令,包括正常停车、应急停车和故障停车,IST; 模拟试验时的停油指令,ST。
所以,停油逻辑表达式可以写成:?
第四节 主机遥控系统的逻辑控制
一、换向控制逻辑
换向控制的逻辑包括:换向鉴别逻辑和换向控制条件
起动 停车
正车换 向
倒车换 向
传令指
操纵系统阀箱
电磁阀/电开 关
气动阀件 液压元件
液压 调速器
主机手动遥控系统结构图
燃油泵齿 条机构 主起动阀 停油装置 换向装置
应急手柄
3.驾驶台遥控:自动遥控
驾驶员操车,操纵人员只需操动一次车钟手柄,自动化设备就会根据主 机当时的运行状态,自动依照主机的操纵规律,实现主机工况的自动控 制与变换,直到主机运行状态同车钟指令完全一致为止。
第四章 主机遥控系统实例第一节 气动主机遥控系统
第四章主机遥控系统实例在主机遥控系统中,驾驶台遥控主机必须是全自动的;集中控制室遥控主机可以是全自动的,也允许是半自动的。
根据发送遥控主机信号的不同性质,遥控系统大致分三类:第一类是气动遥控系统。
驾驶台发送的遥控信号是气动的,并经全自动的气动逻辑回路输出控制信号来操纵主机,集中控制室发送的气动遥控信号,可以与驾驶台共用一套气动逻辑回路,对主机进行全自动遥控。
而有些遥控系统,为简化集中控制室的遥控线路,取消了驾驶台遥控的某些功能,通过扳动操车手柄来实现,如重复起动、程序负荷等。
第二类是电一气结合的主机遥控系统。
其中,集中控制室均采用半自动气动遥控系统,而驾驶台是采用电动遥控系统,驾驶台发送的是电的遥控信号,经电动逻辑回路处理后,再经电/气转换器转换成气压信号并由集中控制室的气动逻辑回路来操纵主机。
驾驶台电动遥控系统有两种形式:一种是电动逻辑回路由继电器组成,称为电动有触点遥控系统;另一种是电动逻辑回路由电子器件,如逻辑门电路和运算放大器组成,称为电动无触点遥控系统。
它们与集中控制室气动逻辑回路合在一起,分别称为有触点电一气结合遥控系统和无触点电一气结合遥控系统。
第三类是用微型计算机组成的遥控系统。
集中控制室仍采用半自动气动遥控系统,驾驶台发送的也是电动遥控信号。
其实它也属于电一气结合的遥控形式,所不同的是,其逻辑回路不是由硬件电路组成的,而是由计算机软件程序实现的。
近年来,采用变距桨作为推进装置的船舶有所增加,特别是对于负荷变化较大的工作船及某些滚装船较多采用变距桨。
主机驱动定距桨和驱动变距桨的工作方式是完全不同的,因此,主机遥控系统的功能和组成差异较大。
第三章所介绍的各种逻辑回路,主要是对驱动定距桨主机而言的,有些是不适合于变距桨的。
限于篇幅,这里将不再介绍驱动变距桨的主机遥控系统。
在实际应用中,主机遥控系统的形式是多种多样的。
尽管它们的基本逻辑功能是相同的,但各种逻辑回路的组成方式、回路之间的连接方式,以及某些逻辑回路的实现方法等都各不相同,不可能以一概全。
AUTOCHIEF-Ⅳ型主机遥控系统
2. 在AUTOCHIEF-Ⅳ型主机遥控系统中,主机在运行时当驾驶室车钟从正车推到倒车位置,则遥控系统进行的逻辑控制程序为()。
DA.换向→停油→强制制动→倒车起动 B.强制制动→停油→换向→倒车起动 C.换向→能耗制动→强制制动→倒车起动 D.停油→换向→强制制动→倒车起动 3. 在AUTOCHIEF -Ⅳ型主机遥控系统中,驾驶室AC-4控制单元操作面板的组成包括()。
DA.备车指示灯 B.完车指示灯C.应急停车按钮 D.主机给定转速和实际转速显示器 4. 在AUTOCHIEF-Ⅳ型主机遥控系统中,在主机停车时进行模拟试验的条件是()。
B A.关闭主起动阀,用集控室车钟发送车令 B.关闭主起动阀,用驾驶室车钟发送车令 C.开启主起动阀,用集控室车钟发送车令D.开启主起动阀,用驾驶室车钟发送车令 5. 在AUTOCHIEF-Ⅳ型主机遥控系统中,主机在运行时把车钟从正车拉到倒车位置,主机仍在原转向运转,故障部位可能是()。
D A.正车电磁阀线圈烧断 B.倒车电磁阀线圈烧断 C.起动电磁阀线圈烧断 D.停车电磁阀线圈烧断6. DGS8800e数字调速系统可接受的转速设定输入信号包括()。
B A.4~20mV电压 B.4~20mA电流 C.0~10mA电流 D.4~10mV电压7. 在AUTOCHIEF-Ⅳ型主机遥控系统中,控制停车电磁阀、正车电磁阀、倒车电磁阀和起动电磁阀的输出接口采用()。
BA.串行输出接口8251 B.并行输出接口8255 C.A/D接口 D.D/A接口8. 在AUTOCHIEF-Ⅳ型主机遥控系统中,遥控系统的参数设定只能在()。
进行。
C A.驾驶台AC-4单元操作面板上 B.驾驶台车钟单元操作面板上 C.集控室AC-4单元操作面板上 D.集控室车钟单元操作面板上9. 在AUTOCHIEF-IV型主机遥控系统中,模拟试验面板的作用不是()。
D A. 显示系统工况 B. 检查系统功能及判断故障 C. 检查并调整系统参数 D. 整定调速器参数10. 在AUTOCHIEF-Ⅳ型主机遥控系统中,故障判断流程图的作用是()。
主机遥控系统实例共53页PPT

11、用道德的示范来造就一个人,显然比用法律来约束他更有价值。—— 希腊
12、法律是无私的,对谁都一视同仁。在每件事上,她都不徇私情。—— 托马斯
13、公正的法律限制不了好的自由,因为好人不会去做法律不允许的事 情。——弗劳德
14、法律是为了保护无辜而制定的。——爱略特 15、像房子一样,法律和法律都是相互依存的。——伯克
Байду номын сангаас
31、只有永远躺在泥坑里的人,才不会再掉进坑里。——黑格尔 32、希望的灯一旦熄灭,生活刹那间变成了一片黑暗。——普列姆昌德 33、希望是人生的乳母。——科策布 34、形成天才的决定因素应该是勤奋。——郭沫若 35、学到很多东西的诀窍,就是一下子不要学很多。——洛克
船舶柴油主机遥控系统图文

船舶柴油主机遥控系统图文1. 背景介绍在现代船舶上,主机是船舶最大的能源装备。
主机的良好运行是保证船舶顺利进行各种航行任务的重要保障。
电力系统需求的增加和电气化航运的发展,船舶的主机也越来越多的采用柴油机作为主要的能源装备。
对于大型的船舶,由于船舶本身和船员数量的增多,传统的手动操作方式已经不能满足现代化的要求,因此远程遥控系统变得越来越重要。
2. 整体构成船舶柴油主机遥控系统主要由控制器、遥控面板、柴油机和其他辅助设备组成。
控制器负责接收遥控信号,通过遥控面板进行控制柴油机的启停和调速。
当控制器接收对应的指令后,会自动向柴油机的燃油喷油系统以及空气控制系统进行输出指令,以满足相应的负载需要。
同时,系统还通过传感器实现对柴油机的各种数据进行检测,以根据需要实现自动化控制和报警。
3. 控制器控制器是整个船舶柴油主机遥控系统的核心部件,主要用于接收遥控信号和进行自动化控制。
控制器通常采用嵌入式处理器和可编程逻辑控制器等技术,具有多通道、高速度、高精度和可靠性的特点,具有良好的工作效率和稳定性。
4. 遥控面板遥控面板是船员操作遥控系统的主要界面,可将人的指令传递给主机的控制器。
通过遥控面板可以实现主机的启停、调速和故障报警等功能。
遥控面板通常采用模拟和数字式两种不同的信号形式,模拟式是通过旋转撬杆实现柴油机调速控制,数字式则是通过触摸屏实现。
5. 柴油机柴油机是船舶柴油主机遥控系统的关键部件,根据应用不同可以选择不同的型号和品牌。
柴油机的主要功用是将化学能转化成机械能,提供船舶的动力输出。
在船舶柴油主机遥控系统中,通常使用高功率输出的柴油机,以满足船舶各种工作状态下的运行要求。
6. 其他辅助设备除了控制器、遥控面板和柴油机外,船舶柴油主机遥控系统还需要其他辅助设备来配合工作,例如传感器、伺服电机、电控阀、运动控制器等。
传感器负责检测柴油机的各种参数,如转速、油压、水温等,以便控制器对柴油机的运行状态进行监测和控制。
船舶主机遥控系统

软件编程与调试
01
软件编程
02
编写各模块的驱动程序和控制算法。
设计友好的人机交互界面。
03
软件编程与调试
确保软件功能正确、性能 稳定。
在模拟环境和实际环境中 进行软件调试。
软件调试
01
03 02
系统集成与测试
系统集成
01
进行模块间的联调,确保各模块之间的通 信和协同工作正常。
03
02
将各模块集成在一起,形成一个完整的系统 。
设计原则与流程
详细设计
对每个模块进行详细设计,包括硬件电路、软件程序等。
测试与验证
对系统进行全面的测试和验证,确保满足设计要求。
硬件选型与配置
主控制器
选用高性能、稳定的主控制器,如工 业级PLC或专用控制模块。
通信模块
选用可靠、稳定的通信模块,支持多 种通信协议。
硬件选型与配置
• 传感器与执行器:根据系统需求,选择适当的传感器和执 行器。
在狭窄的航道或复杂的水域,主机遥控系 统可以帮助船舶实现精确的航向控制和速 度调节,保障航行安全。
海洋工程
军事应用
在海洋工程作业中,如海洋平台、风电安 装等,主机遥控系统能够提供稳定可靠的 动力输出,支持大型设备的运输和安装。
在军事领域,船舶主机遥控系统可用于特 种作战、情报收集等任务,提高作战能力 和隐蔽性。
可Hale Waihona Puke 性船舶主机遥控系统的可靠性对于船舶的安全和正常运行至关重要。未来发展将更加注重系统硬件和软件的可靠性 设计、冗余备份和容错处理等方面。
环境友好性与节能减排
环境友好性
随着全球环保意识的不断提高,船舶主机遥控系统将更加注重环境友好性,采用更加环保的材料和技 术,降低对环境的负面影响。
第五章柴油机主机遥控系统.
第五章柴油机主机遥控系统第一节主机遥控系统的基本概念船舶柴油机主机遥控是指离开机旁在驾驶台或集中控制室对主机进行远距离操纵的一种方式。
在这种操作方式中,不可能直接利用主机操纵机构本身的手柄或手轮来操纵主机,而必须在操纵部位(驾驶台或集中控制室)发出的操车信号,这就需要在操纵部位与主机的执行机构之间设置一套综合的逻辑控制回路。
该回路包括组合逻辑回路、时序逻辑回路、反馈控制回路,以及各种安全保护回路。
主机遥控系统是轮机自动化的重要组成部分,是现代化船舶实现无人机舱的必不可少的条件之一。
主机遥控不仅能改善轮机人员的工作条件,改善船舶的操纵性能,而且还能提高船舶航行的安全性,以及主机工作的可靠性和经济性。
通常情况下,驾驶台遥控的自动化程度比集中控制室的高,在驾驶台遥控主机时,驾驶员可按常规的车中操作方法来操纵主机。
这时,主机所需的操作步骤及操作要求均由遥控系统自动实现。
而在集中控制室遥控主机时,考虑到操纵主机的是轮机员,故某些操作可以按主机的操作步骤及要求进行,故遥控系统可省掉一些不必要的环节。
因此,为了降低造船成本和提高船舶的安全性和可靠性,往往把驾驶台遥控主机设计成全自动遥控系统,而把集中控制室设计成半自动遥控系统。
一、主机遥控系统的组成主机遥控系统组成如图5-1-1所示,由图可见,主机遥控系统是由遥控操纵台、遥控装置、测速装置、安全保护装置,以及包括遥控执行机构在内的主机操纵系统五大部分组成。
1.遥控操纵台遥控操纵台设置在驾驶室和集控室内,它的主要作用是提供人机对话的界面。
遥控操纵台上的主要部件是车钟手柄,人通过车钟手柄向遥控系统发出控制命令,如正车、倒车、停车和转速的设定。
显示屏向人们提供遥控系统执行命令的情况、各种参数和状态信号的显示、报警指示、车钟记录以及辅车钟信号的联系。
紧急操纵按钮用于发出应急运行、应急停车等命令。
操纵部位转换开关用于驾驶室与集控室间的遥控部位选择。
2.遥控装置遥控装置是整个遥控系统的控制中心,它根据遥控操纵台给出的指令,测速装置提供的主机转速的大小和方向,位置检测器提供的凸轮轴位置信号等,完成对主机的起动、换向、制动、停油等逻辑程序控制以及转速与负荷控制功能。
第四节 微机实现的主机遥控系统
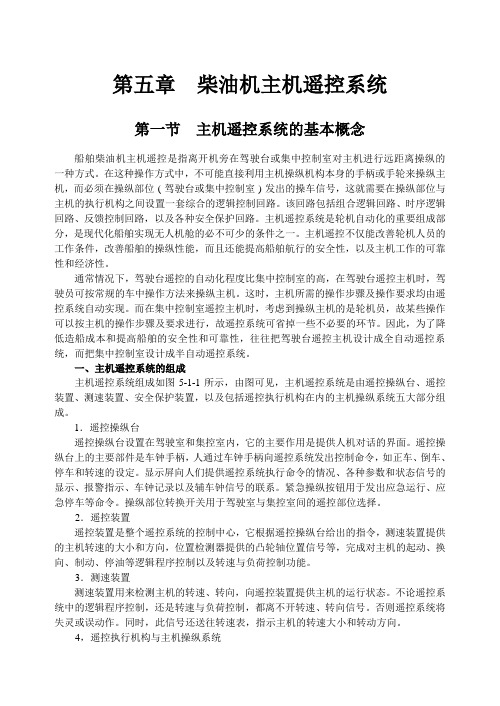
第四节微机实现的主机遥控系统用微机实现的主机遥控系统能完成常规主机遥控系统的所有功能。
在微机式主机遥控系统中,各种逻辑和控制功能不是用硬件电路实现的,而是由软件程序实现的。
这就大大简化了遥控系统的硬件电路,提高了其工作的可靠性。
同时,它还有体积小、重量轻、使用方便及自检功能比较强等优点,因此微机式主机遥控系统得到越来越广泛的应用。
目前,世界上各大船用控制系统生产厂商都已推出了各自的微机式主机遥控系统。
这里介绍的是SIMENS公司生产的DIFA-31型主机遥控系统。
系统的总体框图如图4-4-1所示。
驾驶台车钟、集中控制室车钟、各种相关的传感器及按钮所发出的信息,通过输入接口电路送入微机。
微机把车令与主机当前的运行状态相比较,经分析和判断后,由输出接口电路发出各种控制指令,以实现车钟所要求的操作。
主机的停油、换向、起动及安全保护等操作,其输出均是开关量,如控制电磁阀、指示灯和报警喇叭等,不同机型其动作的逻辑条件基本相同,但在控制方法上稍有不同。
转速控制方面,由于用户的要求不同而有所不同,有些是采用电子调速器,有些是采用PGA型液压调速器。
通常这两种调速方式都要接信号转换器和伺服器。
一、系统主要设备及系统的基本操纵DIFA-31遥控系统的全部设备被分别设于驾驶室、集控室以及机舱,如图所示。
在驾驶室——遥控车钟及车钟指令发送器。
——按钮和指示灯面板(如表4-4-1所示),它可以给出以下信息:l辅车钟9:备车(自锁按钮、H9)。
13:备车毕(自锁按钮、H13)。
17:完车(自锁按钮、H17)。
l输入DIFA-31的参数、附有指示灯显示。
1:应急操纵(自锁按钮、H1)。
2:故障减速运行(H2)3:紧急停车(自锁按钮、H3)。
4:越控操纵(自锁按钮、H4)。
5:车钟故障(H5)。
6:凸轮轴正车位置(H6)。
7:自动控制系统故障(H7)。
8:启动失败(H8)。
10:凸轮轴倒车位置(H10)。
11:驾驶台遥控(H11)。
《船舶主机遥控系统》课件

系统各部分功能说明
遥控装置用于发送控制指令,控 制器处理指令并控制执行机构, 传感器监测船舶主机状态。
技术特点
通讯技术
船舶主机遥控系统采用先进的 无线通讯技术,确保指令的及 时传输和可靠性。
控制技术
系统采用高精度的控制技术, 能够实现精确的船舶主机控制。
感知技术
利用传感器技术,能够实时感 知船舶主机的状态,确保安全 和稳定的操作。
系统组成
船舶主机遥控系统由遥控装置、控制器、传感器、执行机构等部分组成。
系统优点
船舶主机遥控系统能够提高船舶主机的操作效率和安全性,减少人力成本和人为误操作的风 险。
系统结构和工作原理
系统结构图
船舶主机遥控系统的结构图展示 了各个部件之间的连接和关系。
工作原理简述
船舶主机遥控系统通过遥控装置 发送指令,控制器接收指令并处 理,然后传输给执行机构实现对 船舶主机的控制。
应用场景
1 船舶类型
船舶主机遥控系统适用于各种类型的船舶,包括货船、客船、油轮等。
2 操作场合
系统适用于需要频繁控制船舶主机的场合,如港口操作、航行中的调整等。
安全性及应急措施
1
应急措施
2
Байду номын сангаас
针对可能出现的故障或紧急情况,系统 提供了相应的应急措施,保证操作人员
的安全。
安全性考虑
系统考虑了安全性设计,采用多重措施 确保船舶主机遥控的安全性。
展望
随着船舶主机遥控系统的发展,我们可以期待更多的创新和应用。
发展前景
目前发展状况
发展趋势
未来发展方向
船舶主机遥控系统的应用正在逐 渐扩大,已取得一定的发展成果。
随着技术的不断进步,船舶主机 遥控系统将更加智能化和自动化。
第四章 主机遥控系统实例
起动信号送重复起动回路“1” “0”不可能起动
速放阀
事实上,只要低于发火转 速,无论转速与车令一致或 不一致,都应该起动主起动 阀,强制制动或起动。
M351/2、M351/4、M301/5 保证高于发火转速不能进行 强制制动 转速高于 低于发火 转速上位 发火转速 下位
低于发火转速 强制制动状态 转速车令不一致 或转向一致 可以进行起动 监测起动成 功,成功则 停止起动 低于发火 转速上位
24=0 35=0
1
在换向过程中,随着凸轮轴 的移动,拨动阀 M221 阀芯的反 馈凸轮也在转动,阀M331/2在凸 面作用下右位通,输出为 0 ,换 向到位时,阀M331/2复位左位通, 输出为1,为制动作好准备。
1 顶升机构 M215是换向检测阀。其中,已经停油时管35为0,低于换向转速时,阀A373/1通电 左位通输出为0信号,故或门阀A405/3 输出为0,经管24使阀M301/6下位通,阀M405/1 输出的1信号经阀M301/6下位输出使管46为1。该1信号送至顶升机构把进排气阀阀杆抬 起,同时管9为1信号使阀M347下位通。这时阀M215的连锁信号4x才经阀M347的下位 泄放,解除对阀M215 的连锁,方可进行换向操作。比如要进行正车换向,Z5为1,Y5为 0,阀M215上位通,正车换向油缸通气源,倒车换向油缸通大气,凸轮轴从倒车位置向 正车位置移动,在凸轮轴移动过程中,通过机械反馈机构把阀 M221的阀芯从右向左拨 动,换向到位时,阀芯正好被反馈到Ⅲ位,在此位置,倒车的0信号被截止,正车1信号 与接口6通使管62为1信号,标志换向已完成,即车令与凸轮轴位置一致。同时,接口3 和2均通大气,撤消阀M215控制端信号,管46为0信号,进排气阀顶杆落在正车凸轮片 上,管9为0信号,4x 通气源,又把阀M215 锁在中路通位置,换向操作结束。
主机遥控系统实例资料
指示灯和按钮面板
应急操纵(按 钮、灯)
系统安全运行
(灯)
应急停车(按 钮、灯)
车钟故障 (灯)
备车 (按钮、 灯)
备车 完毕 (按钮、灯)
完车 (按 钮、灯)
凸轮轴在正车 位置(灯)
凸轮轴在倒车
位置(灯)
控制空气 (灯)
空
自动控制系统故
障(灯)
驾驶台控制 (灯)
空
机舱手动控
制(灯)
驾驶台请求遥控 (按钮、灯)
第四章 主机遥控系统实例
第一节 气动主机遥控系统 第二节 有触点电—气结合主机遥控系统 第三节 无触点电—气结合主机遥控系统 第四节 用微机控制的主机遥控系统
返回目录
第一节 气动主机遥控系统
一、气源装置及操作部位转换
1、气源装置
图4-1-1
2、操作部位转换 图4-1-2
二、停油与换向
1、停油 2、换向
图4-4-5 图4-4-3 图4-4-8
图4-4-6 图4-4-4 图4-4-9
图4-4-7 表4-4-2
五 模拟实验装置 图4-4-10 图4-4-11 图4-4-12
返回本章
安全保护系统
按钮灯板
模拟实验板 车钟打印机
集控室车钟
应急停车 应急运行
驾驶台车钟
处理车令 加速或减速 控制
故障灯和报警
实际转速
1 D6
11 ms
P
2
5ms
DB0 DB1 DB2
DB7
6 G1 3
+
PESP
+ S11 AB11
+
+
+
7
4
第四章主机遥控系统

三、重起动逻辑控制
重起动是指在应急起动等情况下,遥控系统自 动增加起动供油量或者自动提高发火转速的起动。 重起动逻辑回路功能: 遥控系统发出起动指令后,重起动逻辑回路要 能判别是否满足重起动逻辑条件,如果不满足,起 动逻辑回路发正常起动信号;若满足重起动逻辑条 件,则发重起动信号;如果起动成功,要撤消重起 动信号,以备下次起动时重新判别是否满足重起动 逻辑条件。
1、慢转起动逻辑条件
1)起动前,主机停车时间超过规定的时间,STd 2)没有应急取消慢转指令, ISC 3)主机没有达到规定的转数(1~2转)或规定的 慢转时间, 4)没有重起动信号, YST 4)满足起动逻辑条件,YS0 慢转起动逻辑表达式:
YSLD= STd · SC · I
· ST · SO· Y Y
2、慢转起动控制方案
(1)控制主起动阀开度
(2)采用主、辅起动阀
关
开
去汽缸起动阀
VB
VA
关 开
VSL )(
V’A V’B
慢转信号VSLO
VC
起动信号YSO
气源
五、制动控制
制动是指主机在运行中进行换向,当凸轮轴换 向完成后,为使主机更快地停下来,以便进行反向 起动所采取的“刹车”措施。 主机制动方式有两种:能耗制动和强制制动 能耗制动通常用在中速机的应急换向过程中。强制 制动适用于低速机的应急和正常换向过程中的制动, 同时也适用于中速机的正常换向过程中的制动,或 能耗制动后的制动。
b)手动的 c)气动的 e)电动的(电磁阀)
2、三位四通阀 主要用作换向阀
P
6 A B (a) (b) 7
5
1-阀体;2-左滑阀;3-弹簧;4-右滑阀;5-倒车信号;6-正车信号;7-连锁信号 A-正车换向口;B-倒车换向口;P-气源口
NABCO主机遥控系统
NABCO主机遥控系统
完善的主机遥控系统包括以下环节:逻辑程序控制,包括自动换向、自动起动、重复起动、重起动和制动的逻辑控制;转速与负荷控制,包括转速信号发送速率限制和负荷程序;安全保护与应急操作;系统功能模拟试验等。
主机遥控系统的设备包括驾驶台车令发讯器、电气控制箱、微型机主机遥控系统、驾驶台/集控室、操纵位、置选择、主
机安全保护电路、系统运行状态反馈信息、阀箱、微机操纵方式时、电-气转换部件、转向、转速、凸轮、滑油压力、冷却水、正车、倒车、门、起动、停车、调速等。
NABCO主机遥控系统结构图(80年代)包括301A倒车
电磁阀、阀箱、机旁执行机构、机旁操纵台、305A气动遥控
正车信号、301B正车电磁阀、正车信号、401手动、31、33、405B、405A、换向阀、305B气动遥控倒车信号、301C停油
电磁阀、305C气动遥控停车信号、控制气源0.7MPa、倒车信号、AH、凸轮轴换向、伺服油缸、AS、402、停油信号、
305E、301D、起动电磁阀、305D、301E紧急停车电磁阀、
405C、36、停油气缸RUNNINGSTOP、调油量杆、403、起动信号、气动遥控起动信号、27、28、气动遥控调速信号、气动遥控操纵时、临界转速回避、起动油量定、应急减速环节、电-气转换器304、DOWNFAST、37、406、主起动阀、起动控
制阀、去主机、起动空气气源3MPa、307B、404、机旁调速
阀遥控时有气0.7MPa32.
NABCO气动系统图包括正车电磁阀、电-气变换器、升
旁降、压通压、倒车电磁阀、停油电磁阀、启动电磁阀、+5V、RL、SMT、EPD、3、1、A、3、1、C、F、A、S、T、U、P、24V、D。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
9 驾驶台发车令亮 10 强制零位亮
车令值(参考值)
发送速率程序
用驾驶车钟发车令
123
7
驾驶台操纵 正车
9
12
14 整定最低稳定转速 加速
15 临界转速上限 16 临界转速下限
22
24 快速率 25 中速率 26 慢速率
正车 执行机构 32
56
5 集控室控制亮 6 调速器断开亮
4 S11 R1 8
用模拟电位 器发车令 TEST
M
M
5 07
07 0
PC PB
PA
V121 8255 FF34 H
RESET WR RD A0 A1 D7~D0 CS
M
8
7 0 7 0 7 0 54
PC
PB
PA
V115 8255 FF35 H
RESET WR RD A0 A1 D7~D0 CS
M
9
AB4 AB5 MEMR
D7~D0
返回最近
V116
图4-1-3(a) 图4-1-3(b)
返回本章
返回最近
返回最近
返回最近
返回最近
三、制动 1、能耗制动 2、强制制动
四、起动 1、正常起动 2、重复起动 3、起动油量设定 五、调速
返回本节
六、机旁操作 七、模拟实验 八、管理要点
返回本节
第二节 有触点式电—气结合主机遥控系统
一、集中控制室遥控
凸轮轴模拟 S10 位置开关
68 凸轮轴在倒车
69 正车换向 70 倒车换向 71 启动 72 慢转启动 73 取消增压
限制 74 停车
75 启动空 气分配器
76 达到预整 定启动转速
调速器停
消除蜂鸣器音响 S8 S3 7 年
8 打印
S2 S1
9 delta n ( 每隔 delta n 车钟打印机打印一次)
20
21
Vcc HOLD HLDA CLK RESET IN READY IO / M S1 RD WR
ALE S0 A15 A14 A13 A12 A11 A10
A9 A8
IO / M S1 S0
000
001
010
138
译
011
码
100
器
101
110
111
8085 CPU 片脚
(空) MEMW MEMR 取码
10 11
11 集控 室 发车令
1
13 倒车
17 最大正车转速
18 最大倒车转速 19 故障2限制 20 轮机长限制 21 启动转速
2
23 减速
27 应急操 28 纵
29 跟踪 30 转换点1 31 转换点2
3
33 倒车
4
7 车钟发车令亮
12 发正车车令亮
模拟电位器R发指令亮
13 发倒车车令亮
故障
用电位器模拟实际转速
5日 6月
七段数码显示管
正车 47
48 倒车
49 最小实际转速
50 切断空气转速1 51 切断空气转速2 52 换向转速 1 53 换向转速 2 54 高速 55 达到临界转速
59 应急操纵 S9 60 计算机工作 62 改变车令 63 第一次启动 64 第二、三次
启动
65 不能启动 66 油门在零位 67 凸轮轴在正车
(空)
IOW IOR 中断响应
返回最近
15V 1K R5=1K
R6=22
0V (a)
R23=100
0 ~ 0.22V R23=100
60V
R5=3.9K
R=150K R6=22 0V
(b)
R23
0.33V 0.07V R23
图4-4-4 模拟量开关量输入电路
返回最近
24 V
备车按钮 自动控制开关
自动停车 自动转速限制 测速发电机
计算机处理设备
转速限制
B&W SULZER
集中监视报警 系统
报警
电压电流 电气 转换 转换
伺服执 行器
调速器
控制电 磁阀
B&W SULZER
开关量输入
电子调 速器
电压电流 电液执行
转换
机构
MAN FIAT
柴油主机
图 4-4-1 微机控制的主机遥控系统框图
数字转速 传感器
图4-2-1a 图4-2-1b
1、气源装置 2、停车操作 3、正车换向与起动 4、从正车向倒车换向 5、转速控制
返回本章
返回最近
返回最近
二、驾驶台遥控
1、停油操作
图4-2-2
2、正车换向起动操作
3、在运行中换向起动操作 4、重复起动控制回路
5、慢转起动操作回路 6、转速控制回路
图4-2-3 图4-2-4 图4-2-5
1 D6
11 ms
P
2
5ms
DB0 DB1 DB2
DB7
6 G1 3
+
PESP
+ S11 AB11
+
+
+
7
4
74LS373
AB1
P S1 M
AB0
6
6 11 5
P
D0
D0
3
图4-4-3 输入电M 路板电路图(2)7 2
P
+
返回最近
CC51
8255
PA FFEC H
PB FFED H
0 1 2 3 4567 0 1 2 3 45 67
6
5
4
3
2
1
通道号 0
地址 FEFC H
插头号 4z24 4b24
集控室应急操纵按钮 驾驶台应急操纵按钮
集控室应答按钮 驾驶台应答按钮
空 应急停车触点 应急减速触点
空
24 V
M
P6 P
89
K1
M
P5
K2
P
Tr M
D23 EN
A2 A1 A0
D21
A2 A1 A0
98
D3 D2 D1 D0 N15
K1
34 测速发电机故障
R2 45
转速实际值
35临速运转超时 36 硬件故障
34 测速发电机故障
37打印机故障
测量
TEST
38车钟发令故障
39 初次启动脉冲 传送 1 记数 测速发电机来
故障 40 三次启动失败 S4
S5
2秒 3分
的转速实际值
41自动停车故障 S6
4时
46
42 自动减速故障 消除上述故障灯 S7
15
返回最近
15
返回最近
图 4-4-6 CC15印刷电路板输入信号连接图
14
13
12
11
10
9
8
通道号
地址 FEFC H
插头号 4d24 4d26
空 凸轮轴正车位置开关 凸轮轴倒车位置开关
盘车机位置开关
接驾驶台发送转速电位器 接集控室发送转速电位器 来自测速发电机1实际
转速
轮机长燃油限制
60 V
7
CLR
P5
MD
STB 8212
4 DS1
D3
11 DS2 D2
MEMW
D1
D7~D0
D0
INT
00 01 02
P5 P5 P5
A3
A2
A1
DC 506
A0
D
0F
P5
V113
V112
SN74221 100μs
INit
D0
8701 CN
D7
D8 D9 BUSY
P5
MEMR
24
V124
M MD D0
D7
CLR 8212 STB FF01 H
K2
Tr
M
P Vref
M M
M
_ _
+
Vin
+
8701CN
启动A/D转换
21 D9 D8 D7 D6 D5
D0
图4-4-3 输入电路板电路图(1返)回最近
P H1
M
H2
PM 21 D9 D8
P
D7 D6
5 4 57 46 3
2
1 0
P
1 D32 1 11
3 D15
8 D9
17
D8 18
D33
1 D7 11
返回最近
指示灯和按钮面板
应急操纵(按 钮、灯)
系统安全运行
(灯)
应急停车(按 钮、灯)
车钟故障 (灯)
备车 (按钮、 灯)
备车 完毕 (按钮、灯)
完车 (按 钮、灯)
凸轮轴在正车 位置(灯)
凸轮轴在倒车
位置(灯)
控制空气 (灯)
空
自动控制系统故
障(灯)
驾驶台控制 (灯)
空
机舱手动控
制(灯)
驾驶台请求遥控 (按钮、灯)
返回本章
返回最近
返回最近
返回最近
返回最近
返回最近
返回最近
4、重复起动及起动故障连锁逻辑回路
图4-3-7
5、重起动逻辑回路 图4-3-8
三、转速与负荷控制回路
图4-3-9
1、加速速率限制回路 图3-4-9
2、程序负荷 图4-3-10 图4-3-11 3、转速限制回路 图4-3-12
返回本节
实调 际速 转器 速在 正工 常作
报 警 喇 叭
启
应 急 操 纵