第6章 简单的超静定问题
材料力学 简单的超静定问题

FN 3 l 3 E 3 A3
FN1
FN3
a a A
A1 FN2
l3
FN 3l3 E 3 A3
(3)
(4)补充方程:由几何方程和物理方程得:
F N 1l1 E1 A1
2
cos a
(5)联解(1)、(2)、(3)式,得:
FN 1 FN 2 E1 A1 F cos a 2 E1 A1 cos a E 3 A3
第六章
简单的超静定问题
1
第六章
§6-1
§6-2
简单的超静定问题
超静定问题及其解法
拉压超静定问题
§6-3 §6-4
扭转超静定问题 简单超静定梁
2
§6-1
超静定问题及其解法
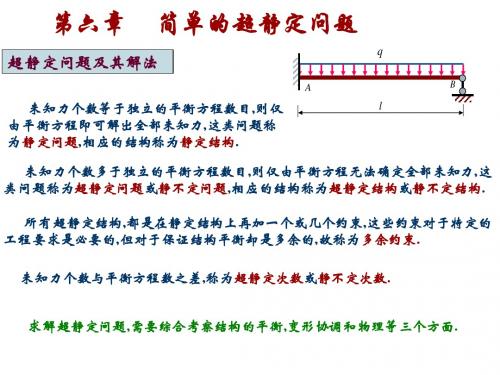
1.单纯依靠静力平衡方程能够确定全部未知力(支反 力、内力)的问题,称为静定问题。 相应的结构称为静定结构。
2.单纯依靠静力平衡方程不能确定全部未知力(支反 力、内力)的问题,称为超静定问题。 相应的结构称为超静定结构。
3
F N3 A3 9F 14 A [ ]
F
[F ]
14 9
14 9
[ ] A
[ ] A
11
[例6-2-4]木制短柱的四角用四个40404的等边角钢 加固,角钢和木材的许用应力分别为[]1=160MPa和 []2=12MPa,弹性模量分别为E1=200GPa 和 E2 =10GPa;求许可载荷P。 解:(1)以压头为研究对象, 设每 个角钢受力为FN1,木柱受力为FN2.
14
B
1
D
C
3 2
(2) 几何方程
l1 ( l 3 ) cos a
材料力学第6章简单超静定问题习题解

第六章 简单超静定问题 习题解[习题6-1] 试作图示等直杆的轴力图解:把B 支座去掉,代之以约束反力B R (↓)。
设2F 作用点为C ,F 作用点为D ,则:B BD R N =F R N B CD +=F R N B AC 3+=变形谐调条件为:0=∆l02=⋅+⋅+⋅EA aNEA a N EA a N BD CD AC02=++BD CD AC N N N03)(2=++++F R F R R B B B45FR B -=(实际方向与假设方向相反,即:↑)故:45FN BD -=445FF FN CD -=+-=47345FF F N AC =+-=轴力图如图所示。
[习题6-2] 图示支架承受荷载kN F 10=,1,2,3各杆由同一种材料制成,其横截面面积分别为21100mm A =,22150mm A =,23200mm A =。
试求各杆的轴力。
解:以节点A 为研究对象,其受力图如图所示。
∑=0X030cos 30cos 01032=-+-N N N0332132=-+-N N N0332132=+-N N N (1)∑=0Y030sin 30sin 0103=-+F N N2013=+N N (2)变形谐调条件:设A 节点的水平位移为x δ,竖向位移为y δ,则由变形协调图(b )可知:00130cos 30sin x y l δδ+=∆x l δ=∆200330cos 30sin x y l δδ-=∆03130cos 2x l l δ=∆-∆2313l l l ∆=∆-∆设l l l ==31,则l l 232= 223311233EA l N EA l N EA l N ⋅⋅=- 22331123A N A N A N =-15023200100231⨯=-N N N 23122N N N =-21322N N N -= (3)(1)、(2)、(3)联立解得:kN N 45.81=;kN N 68.22=;kN N 54.111=(方向如图所示,为压力,故应写作:kN N 54.111-=)。
6-简单超静定问题
FN 1l FN 3l cos EA cos EA FN 1 FN 3 cos 2
5、求解方程组得
FN 1 FN 2
F cos 2 1 2 cos 3
FN 3
F 1 2 cos 3
目 录
二、装配应力
构件的加工误差是难以避免的。对静定结构,加工误 差只是引起结构几何形状的微小变化,而不会在构件内引 起应力。但对静不定结构,加工误差就要在构件内引起应 力。这种由于装配而引起的应力称为装配应力。 装配应力是结构构件在载荷作用之前已具有的应力, 因而是一种初应力。
超静定结构中才有温度应力。
目 录
解题思路: 平衡方程:RA = RB 变形几何关系: 物理关系:
(t 时)
lT lF
lT l t
RB L
RB l lF EA
EA Lt
补充方程:
联立求解: RA RB EAt
EAt t Et A
目 录
一静定问题及超静定问题三基本静定系或相当系统是一个静定结构该结构上作用有荷载和多余约束力61超静定问题及其解法61超静定问题及其解法二多余约束及多余约束力在静定结构的基础上增加的约束
第六章
简单的超静定问题
§6–1 概述
§6–2 §6–3 §6–4 拉压超静定问题 扭转超静定问题 简单超静定梁
目的与要求:
M
max
WZ
32 M
d
max 3
76.4MPa
目 录
例题
结构如图示,设梁AB和CD的弯曲刚度EIz相同. 拉杆BC的拉压刚度EA为已知,求拉杆BC的轴力.
a
C
将杆CB移除,则AB,CD均为静定结构, 杆CB的未知轴力FN作用在AB,CD梁上。为1 D 次超静定。
第六章简单的超静定问题

第六章简单的超静定问题知识要点1.超静定问题的概念(1)静定问题结构或结构的约束反力或内力均能通过静力学平衡方程求解的问题。
(2)超静定问题结构或构件的约束反力或内力不能仅凭静力学平衡方程全部求解的问题。
(3)超静定次数未知力(约束反力或内力)数超过独立的静力平衡方程书的数目。
(4)多余约束力超静定问题中,多余维持静力平衡所必需的约束(支座或杆件)。
(5)多余未知力与多余(支座或杆件)相应的支座反力或内力。
(6)基本静定系在求解静定结构时,解除多余约束,并代之以多余未知力,从而得到一个作用有荷载和多余未知力的静定结构,称之为原超静定结构的基本体静定系。
2.静不定问题的解题步骤(1) 静力平衡条件——利用静力学平衡条件,列出平衡方程。
(2) 变形相容条件——根据结构或杆间变形后应保持连续的变形相容条件,作出位移图,由位移图的几何关系列出变形间的关系方程。
(3) 物理关系——应用胡克定律列出力与变形间的关系方程。
(4) 将物理关系代入变形相容条件,得补充方程 。
补充方程和静力平衡方程,二者方程数之和正好等于未知数的个数,联立平衡方程和补充方程,求解全部未知数。
习题详解6-1 试作题6-1图(a )所示等直杆的轴力图。
解 解除题6-1图(a )所示等直杆的约束,代之以约束反力,作受力图,如题6-1图(b )所示。
由静力学平衡条件,03,0=-+=∑F F F FB A Y和变形协调条件0=∆+∆+∆DB CD AC 并将()EAa F EA a F F EA a F B DB A CD A AC -=∆-=∆=∆,22,代入式②,可得 联立式①,③,解得45,47F F F F B A == 轴力如图6-1图(c )所示6-2 题6-2图(a )所示支架承受荷载F=10 kN,1,2,3各杆由同一材料制成,其横截面面积分别为232221200,150,100mm A mm A mm A ===。
试求各杆的轴力。
第六章简单的超静定问题

2 . 1 F 2 8 F 1 2 4 0 1 . 5 1 2 . 5 4 6 . 2 1 2 N 0
L1
F138.52kN
F 2 1.1 2k9 6N
计算1,2杆的正应力
L2
1
F1 A1
33188.0.550M 2m01mP023Na
1 F1
F
2m
列静力平衡方程 MA0
F12F2F
变形协调方程2 m F F L1 1 24 mm F 2 L24m
2m A
L2 2L1
4m
F2
1m 2
L1
F1L1 E1A!
gTL1
F2L2 E2A2
L2tTEFL222LA222(EFt11LA1T! L2gTL1)
B 变形协调方程
a
aF
FN1
FN 2
A
B
C L1
L2
a
aF
2L1L2
2 FN1L FN2L E1A1 E2A2
FN1
2F
14E2A2
E1A1
FN2
4F 4E1A1 E2A2
L
1.8L LDB
2.拉压超静定问题 图示刚性梁AB受均布载荷作用,梁在A端铰支,在B点和C
例题
6.2
作折杆的剪力和弯矩图
14.14
14.14
A
1
14.14
2
14.14
14.14kN
14.14kN
F
14.14
F s ( kN )
M ( kNm )
例题
求图示简单钢架自由端C的水平位移和垂直位移,设EI为 常数
材料力学(I)第六章
(2) 几何方程
L2
( L3 ) cos L1
材料力学(Ⅰ)电子教案
简单的超静定问题
15
(3)、物理方程及补充方程:
FN 1L1 FN 3 L3 ( ) cos E1 A1 E3 A3
(4) 、解平衡方程和补充方程,得:
FN1 FN 2
E1 A1 cos2 L3 1 2 cos3 E1 A1 / E3 A3
FN 1L FN 3 L 得: cos E1 A1 cos E3 A3
5)联立①、④求解:
FN ! F
④
E 3 A3 2 co s E1 A1 co s2
FN 3
F E1 A1 1 2 co s3 E A
材料力学(Ⅰ)电子教案
简单的超静定问题
[例2-19]刚性梁AD由1、2、3杆悬挂,已知三杆材料 相同,许用应力为[σ ],材料的弹性模量为 E,杆长 均为l,横截面面积均为A,试求各杆内力。
5
1.比较变形法 把超静定问题转化为静定问题解,但 必须满足原结构的变形约束条件。
[例2-16] 杆上段为铜,下段为钢杆,
E1 A1
A
1
上段长 1 , 截面积A1 , 弹性模量E1 下段长 2 , 截面积A2 , 弹性模量E2
杆的两端为固支,求两段的轴力。
C
E 2 A2
F
FB
B
2
(1)选取基本静定结构(静定基如图),B 解: 端解除多余约束,代之以约束反力RB
2E1 A1 cos3 FN 3 3 L3 1 2 cos E1 A1 / E3 A3
例2-22
材料力学(Ⅰ)电子教案
材料力学

5 Pa RD a RD a 6 EI 3EI 3EI
如何得到?
A D
P
B
自行完成
C D
RD
例题 6
图示结构AB梁的抗弯刚度为EI,CD杆的抗拉刚度为EA,
已知P、L、a。求CD杆所受的拉力。
D
a
A
C
L
2
L
B
2
P
解:变形协调条件为 wC lCD
D
a
C
FC
A
( P FC ) L wC 48EI FC L lCD EA
温度应力:
FB E t A
6 1 12 . 5 10 碳素钢线胀系数为 C0
温度应力:超静定结构中,由于温度变化,使构
件膨胀或收缩而产生的附加应力。
不容忽视!!!
路、桥、建筑物中的伸缩缝 高温管道间隔一定距离弯一个伸缩节
例题 11
图示阶梯形杆上端固定,下端与支座距离=1mm, 材料的弹性模量E=210GPa,上下两段杆的横截 面面积分别为600平方毫米和300平方毫米。试 作杆的轴力图。
C
A
FA
B
L2
FC
FA FB FC qL 0
L2
M
A
0
FB
变形协调方程
L qL2 FC FB L 0 2 2
3 FB qL 16
FA 3 qL 16
C q C FC 0
7.5kNm
5qL4 FC L3 5 0 FC qL 8 384 EI Z 48EI Z
由于超静定结构能有效降低结构的内力及变形,在 工程上(如桥梁等)应用非常广泛。
●超静定问题的解法:
第六章简单超静定问题

yc = 0
去掉多余约束而成为形式上 去掉多余约束而成为形式上 基本静定基。 的静定结构 — 基本静定基。
q A
l 2
q
C
l 2
B
AA
L/2
C
Rc
B
L/2
静力、几何、物理条件) 解超静定的步骤 —— (静力、几何、物理条件) 用多余约束反力代替多余约束( 静定基,原则:便于计算) 1、用多余约束反力代替多余约束(取静定基,原则:便于计算) 2、在多余约束处根据变形协调条件列出变形的几何方程 3、把物理条件代入几何方程列出力的补充方程求出多余反力 分析—— ω
A
l 2
1)研究对象,AB梁 研究对象 B 解:1)研究对象,AB梁, 受力分析: 受力分析:R A , RB , RC , ql
∑ Y = 0, R A + RB + RC − ql = 0
∑ M A = 0, RB l + 0.5RC l − 0.5ql 2 = 0
q A
RC
B
2)选用静定基,去C支座 选用静定基, 静定基 3)变形协调方程
C 2 δ
1
3 α
α
A
由温度引起杆变形而产生的应力( 1)温度应力:由温度引起杆变形而产生的应力(热应力)。 温度应力 由温度引起杆变形而产生的应力 热应力)。 温度引起的变形量 —
∆L = α∆tL
1、静定问题无温度应力。 静定问题无温度应力。 超静定问题存在温度应力。 2、超静定问题存在温度应力。
F
B 1
D 3 α α A 2
C
超静定结构的特征:内力按照刚度分配
∆l3
∆l2
A2
∆l1
A3
第六章超静定问题PPT课件

1 2
EA
,
E3 A3
FN3
eE3 A3 l
1
1 E3 A3
2EA
所得结果为正,说明原先假定杆1,2的装配内力为拉力和杆3的装配内力为 压力是正确的。
5. 各杆横截面上的装配应力如下:
1
2
FN1 A
74.53 MP a
(拉应力)
3
FN3 A3
19.51MP a
(压应力)
第26页/共59页
钢管横截面上任意点的切应力为
b
Tb
I pb
GbM e
Ga Ipa Gb Ipb
cos3
E3 A3
解答表明,各杆的轴力与其刚度有关。
第11页/共59页
例6-2 求图示杆的支反力。
RA
解: 平衡方程:
A
A
RA RB P 0
(1)
变形协调条件:
lAB lAC lBC 0 (2)
物理关系:
LAB
RAa EA
RB b EA
(3)
a l
b
C
P
P
B
B
RB
联解得:
RA
b l
M A
M eb l
C
TAC a GIp
Meab
lGIp
第36页/共59页
例题6-6 由半径为a的铜杆和外半径为b的钢管经紧配合而成的组合杆,受 扭转力偶矩Me作用,如图a。试求铜杆和钢管横截面上的扭矩Ta和Tb,并绘 出它们横截面上切应力沿半径的变化情况。
(a)
第37页/共59页
Tb Ta
(b)
第9页/共59页
Bx
Bx FB
§6-2 拉压超静定问题
第六章简单超静定问题共68页

Δ1lΔ2lF EN 1A l11 1E1A F1N cl1oαs
l3
FN3l E3 A3
3
2
1
A
Δ1lΔ2lF EN 1A l11 1E1A F1N cl1oαs
l1 l3
A2 A1
由变形协调方程和物理方程,可得到补充方程。
FN1l FN3l cos E1A1cos E3A3
FN3
FN1
E3A3
超静定次数 ——未知力个数与独立平衡方程数 之差 多余约束 —— 保持结构静定多余的约束
B
D
A
F
B
BC
D
A
D
F
A F
二、求解超静定问题的基本方法
方法1:寻找补充方程法(适用于求解拉压超
静定) 因为未知力个数超过了独立的平衡方程数,必须寻 找补充方程。 寻找补充方程的途径: 利用结构的变形条件
结构受力后变形不是任意的,必须满足以下条件:
例题
两端固支的直杆AB,长度为l ,抗拉刚度为EA, 热膨胀系数为α l。
求:温度升高 t 后0c杆内的应力。
A
B
l
解:
本问题为一次超静定 A
静平衡方程
l
Fx 0 FRAFRB
变形协调方程
l lT lF0
FRA A
物理方程
lT l lt
lF
FRAl EA
联解,得: F RA F RB EA l t
FAFBF
变形条件:
FA
BFBF B0A
A
A
A
物理条件:
a
B
F
Fa EA
F
F
F
B FB
FBl EA
[工学]第六章简单的超静定问题
![[工学]第六章简单的超静定问题](https://img.taocdn.com/s3/m/0639a72708a1284ac95043cb.png)
(4) 由静力平衡方程和补充 方程联立解 N1 和 N2
2N2+N1-P=0
N1
P 5
N
2
2P 5
1
a
2a
2
A
C
B
P
N1
N2
P
N
(5) 由强度条件求 Pmax 强度条件为
N1 P 5 [σ ] AA N 2 2P 5 [σ ] AA
由
N2 2P 5 [σ ] AA
求得 P=50KN
1
a
A1A2 装配后 3 杆的伸长 B1B2 装配后杆 1 的缩短 C1C2 装配后 2 杆的缩短
B
D
C
l
1
3
2
A
1
3
2
A
C2 C1
A1 B2
A2
B1
N1 N3 N2 A
N1,N2,N3 为各杆的装配内力
A1 A2
N3l EA
l
B1 B2
C1 C 2
N1 cos EA
1
3
2
B
D
C
l
1
3
2
l 2
B
lT
B
l N B
P2 B
补充方程是:
N l T l EA
温度内力为:
N EA T
温度应力为: σ N E T A
A
l
A
A
P1
B
lT
B
l N B
P2 B
例题:桁架由三根抗拉压刚度均为 EA 的杆在 A 点绞接, 试求由于温度升高 T 而引起的温度应力。材料的线膨胀系 数为。
2a
2
A
第6章简单超静定问题
M D 0, 1.5FN1 0.5FN2 0.5FN3 0
变形协调条件: 胡克定理:
2l2 l1 l3
2FN2 FN3 FN1
解法3:
l
1
2
3
a
a
=
a 2
A BD C
F
FN1
F 12
F FN2 3
FN3
7F 12
l
l
1
2
3
a
a
a 2
A BD C
F
+
1
2
3
a
a
a 2
A BD C
Fa/2
超静定结构(静不定结构): 仅凭静力 学平衡方程不能求解全部未知内力 B 或反力的结构。
超静定结构的未知力的数目多于独 立的平衡方程的数目;两者的差值 称为超静定的次数。
FB B
DC
A
B
D
C
1 32
y
aa
F N1
a
FaN3
F N2
FA A
F FC C
FB B
A F
A x
F
•习惯上把维持物体平衡并非必需的约束称为多余
Me =7 kN·m d1=0.6 m
2m
A
B
C
1m
1m
2m
d2
参考答案:
Me =7 kN·md1=0.6 m
2m
A
B
C
1m
1m
2m
d2
MC=FN·d1 (1) l = FNl / EA (2)
T 1 / GIP FNd1 2 / GIP (T M e ) (3)
则变形协调关系为:
l
孙训方《材料力学》(第6版)笔记和课后习题(含考研真题)详解-简单的超静定问题(圣才出品)
8 / 42
圣才电子书 十万种考研考证电子书、题库视频学习平台
Δl1=FN1l1/EA1=FN1l/(EA1cos30°) Δl2=FN2l2/EA2=FN2l/(EA2) Δl3=FN3l3/EA3=FN3l/(EA3cos30°) 代入式③可得补充方程: FN1l/(EA1sin30°·cos30°)=2FN2l/(EA2tan30°)+FN3l/(EA3sin30°·cos30°)④ (3)求解 联立式①②④,可得各杆轴力:FN1=8.45kN,FN2=2.68kN,FN3=11.55kN。
9 / 42
圣才电子书 十万种考研考证电子书、题库视频学习平台
MB = 0
FN2 Leabharlann 2 2a+
FN4
2 2
a
+
FN3
2a − F ( 2 a + e) = 0 2
②
根据结构的对称性可得 FN2=FN4③
(2)补充方程
如刚性板的位移图所示,根据几何关系可得:Δl1+Δl3=2Δl2④
由结构对称可知 Δl2=Δl4,其中,由胡克定律可得各杆伸长量:
Δl1=FN1l/EA,Δl2=FN2l/EA,Δl3=FN3l/EA
代入式④,整理可得补充方程:FN1+FN3=2FN2⑤
(3)求解
联立式①②③⑤,解得各杆轴力:
FN1
=
(1 4
−
e )F(压) 2a
FN2
=
FN4
=
F 4
06第六章 简单超静定问题(拉压)

补充内容:第六章简单超静定问题§6-1 超静定问题及其解法•一、静定和超静定问题静定问题:约束反力(轴力)可由静力平衡方程求得用平衡方程可求两杆轴力,为静定问题。
§6-2 拉、压超静定问题超静定度(次)数:平面平行力系:2个平衡方程共线力系:1个平衡方程§6-2 拉、压超静定问题拉压超静定结构的求解方法:5、求解方程组得αα3221cos 21cos +==F F F N N α33cos 21+=F F N 1l ∆2l ∆3l ∆§6-2 拉、压超静定问题§6-2 拉、压超静定问题§6-2 拉、压超静定问题o30BC o 30D123§6-2 拉、压超静定问题o30BC o 30D123F§6-2 拉、压超静定问题o30BC o 30D123F拉压超静定问题例 图示刚性梁AB受均布载荷作用,梁在A端铰支,在B点和C点由两根钢杆BD和CE支承。
已知钢杆的横截面面积ADB=200mm2, 例题 6.2 A =400mm2,其许用应力[σ]=170MPa,试校核钢杆的强度。
CE 1)列静力平衡方程 2)变形协调方程1.8L∑MA=0FNCE = 135kN − 3FNBDFNBD × 1.8l 5 3× F × l FNCE= 3∆L− 30kN / m × 3m × 1.56 + FNBD= 3m = 0 NCE 2 ×1m m 2 = × ∆LDB CE NCE 200 × 10 −FNBD × E F400 × 10 −6 m × E mD630kN / mBFNBD = 32.2kNFNCE = 38.4kNALC1m2mEDFBD32.2 × 103 N FNBD = = 161MPa2p [σ ] σ BD = 200mm ADBσ CEB′ FBD1m 2m30kN / mF = NCE ACE38.4 × 103 N = = 96MPa p [σ ] 400mm 2ABCE∆LCE∆ LDB例题 6.3 图示结构中的三角形板可视为刚性板。
材料力学第五版课件 主编 刘鸿文 第六章 简单的超静定问题
例题: 试判断下图结构是静定的还是超静定的?若是超静定, 则为几次超静定?
B
DE
A
C
FP
(a)静定。 未知内力数:3 平衡方程数:3
B
D
A
C
F
P
(b)超静定。 未知力数:5 平衡方程数:3 静不定次数=2
(c)静不定。
未知内力数:3
平衡方程数:2
FP
静不定次数=1
静不定问题的解法: (1)建立静力平衡方程; (2)由变形协调条件建立变形协调方程; (3)应用物理关系,代入变形协调方程,得到补充方程;
基本静定基的选取:
(1)解除B支座的约束,以约束反力
代替,即选择一端固定一端自由
的悬臂梁作为基本静定基。
(2)解除A端阻止转动的约束,以 约束反力代替,即选择两端简支 的梁作为基本静定基。
基本静定基选取可遵循的原则:
(1) 基本静定基必须能维持静力平衡,且为几何不变系统; (2) 基本静定基要便于计算,即要有利于建立变形协调条
E3 A3
F FN3 = 1+ 2E1 A1 cos3 a
E3 A3
(拉力) (拉力)
温度应力和装配应力
一、温度应力
在超静定结构中,由于温度变化引起的变形受到约束的限制, 因此在杆内将产生内力和应力,称为温度应力和热应力。
杆件的变形 ——
由温度变化引起的变形 温度内力引起的弹性变形
例:阶梯钢杆的上下两端在T1=5℃时被固 定,上下两段的面积为
=-
[13EI
32(1+
24
I Al
2
)
]
M
M
A
C
B D
l
材料力学--简单的超静定问题
Mx 0, M A Me MB 0
2. 变形几何方程为:
AB 0
24
MA
MB
(a)
3. 根据位移相容条件利用物理关系得补充方程:
AB
M Bb GI p
(M B Me )a GI p
0
MB
Mea l
另一约束力偶矩MA可由平衡方程求得为
MA
A
A
2EA a
C
C
RA 解: 放 松B端,加支反力RA、RB
则,RA RB F 0 (1) 变形协调条件 : l总 0
F 2a
B EA
F
lAC
lCB
F RB a
2EA
RB 2a
EA
0
(2)
B
由(1)、(2)式得
RB
RB
F 5
,
RA
4F 5
14
B
D
C (2) 几何方程
1
3
aa
2
AA1 0
A
A0
l1 ( l3 ) cosa
(3) 物理方程及补充方程:
FN1l1 ( FN3l3 ) cosa
E1 A1
E3 A3
l3 A1
(4) 解平衡方程和补充方程,得:
FN1
FN2
l3
1
E1A1 cos2 a 2 cos3 a E1A1 /
(a)
26
Tb Ta
(b)
解: 1. 设铜杆和钢管的横截面上内力矩分别
第六章 简单的超静定问题
A
4m
F A
20kN m
ω1 =ω2 B B
A
M A
ω1 B
4m
B
F B ′ F 40kN B
L F 3q 5 P3 q 4 −FL =87 k L . 5N F B B ω1=2 8 − 4 = 8 B 8 IZ 3 IZ 3 E E 2 L L F 15 NP F F =q −F =7 .2 k L3 A FL B P2 2 L ω 2 = BL + + B q2 3 I 3 E E M = IZ −FE= 2 k2 IZ 2 L Z1 5 N m A B 2
EI1 P a A b
P3 a y= 1 3I E1
P P M A A y1 x y2
EI2 x y
(P ) ⋅a ab y = 2 E2 I
P2 a b a y=y +y = ( + ) 1 2 E 3 1 I2 I
(P ) 2 ab x= 2 I2 E
轴向拉压
对称弯曲
扭 转
内力分量 轴力F 轴力FN 应力分布规律 正应力均匀分布
A. 若取支反力 B为多余约束力,则变形协调条件是截面 的挠度 B=0; 若取支反力F 为多余约束力,则变形协调条件是截面B的挠度 的挠度ω B. 若取支承面 1对弹簧底面的作用力 c1为多余约束力,则变形协调条件为 若取支承面C 对弹簧底面的作用力F 为多余约束力, C1面的铅垂线位移 1=0; 面的铅垂线位移∆C C. 若取支承面 1对弹簧底面的作用力 c1为多余约束力,则变形协调条件为 若取支承面C 对弹簧底面的作用力F 为多余约束力, C1面的铅垂线位移 1等于弹簧的变形 面的铅垂线位移∆C 等于弹簧的变形; D. 若取弹簧与梁相互作用力为多余约束力,则变形协调条件为梁在 截面的挠 若取弹簧与梁相互作用力为多余约束力,则变形协调条件为梁在C截面的挠 等于弹簧的变形。 度ωc等于弹簧的变形。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
l2
A
B'
得出补充方程 FN1 2FN2 FN3 (4)联立求解得
F F 7F FN1 , FN 2 , FN 3 12 3 12
l3
B
C C'
超静定问题 单凭静力学平衡方程不能解出全部未知力的问题,称为 超静定问题。此时未知力个数多于平衡方程式个数,其差数 称为超静定次数。 一般超静定问题的解法为:
(1) 装配应力 在静定问题中,只会使结构的几何形 状略有改变,不会在杆中产生附加的 内力 .如1杆较设计尺寸过长,仅是A点
B D 3 C
的移动。 就将产生附加的内力.
在超静定问题中,由于有了多余约束,
2
1
a
A' A
a
A''
附加的内力称为装配内力 , 与之相应的
应力则称为装配应力 , 装配应力是杆在 荷载作用以前已经具有的应力,也称
在超静定杆系中,各杆轴力的大小和该杆的刚度与其它杆的 刚度的比值有关 增大或减少1、2两杆的刚度,则它们的轴力也将随之增大或 减少;杆系中任一杆的刚度的改变都将引起杆系各轴力的重 新分配。这些特点在静定杆系中是不存在的。
归纳起来,求解超静定问题的步骤是: (1).根据分离体的平衡条件,建立独立的平衡方程;
B C F A
B 0
F B
在相当系统中求 B 点的位移,按叠加原理,可得
A
A
B BF BB
(3) 胡克定理(物理关系) FB l Fa BB BF EA EA (4)得出补充方程
C F
B
B
FB
x x
Fa FB l 0 EA EA
Fa 得 FB l
第六章 简单的超静定问题
§6.1 超静定问题及其解法
§6.2 拉压超静定问题 §6.3 扭转超静定问题 §6.4 简单超静定梁
§6.1 超静定问题及其解法
B 1 a a A F 2
C
A
F
B
静定结构: 仅靠静力平衡方程就可以求出结构的约束反力或内力
B 1
D 3 2
C y
N2 FN1 a a F
FA FN3 A F A
e
1)解除“多余”约束,使超静定结构变为静定结构(此相应 静定结构称静定基),建立静力平衡方程。 2)根据“多余”约束性质,建立变形协调方程。 3)建立物理方程(如胡克定律,热膨胀规律等)。 4)联解静力平衡方程以及2)和3)所建立的补充方程,求 出未知力(约束力或内力)。
2、装配应力 · 温度应力
a a 23C源自D A BCY 0,
M D 0,
FN1 FN2 FN3 F 0
1.5FN1 0.5FN2 0.5FN3 0
F
(2) 变形分析—协调条件(求补充方程)
2(l1 l2 ) l1l3
l1
(3) 胡克定理
FN1l l1 , EA FN 2l l2 , EA FN3l l3 EA
F C
F C
FB B
a a
A F
x
B
D
C
超静定结构(静不定结构): 静力学平衡方程 不能求解
超静定结构的未知力的数目多于独立的平
衡方程的数目;两者的差值称为超静定的 次数
A
•习惯上把维持物体平衡并非必需的约束称为多余约束,相应 的约束反力称为多余未知力。 • 超静定的次数就等于多余约束或多余未知力的数目。 •NOTE:从提高结构的强度和刚度的角度来说,多余约束往
Fx 0, FN1 sin a FN 2 sin a 0
A FN3 a a F F F N2 N1
A
F y
Fy 0, FN3 FN1 cosa FN3 cosa F 0
x
B 1
D 3 2 a a A A'
C
(2)变形:变形协调条件(求补充方程)
l1 l3 cosa
(2).建立变形协调条件,求补充方程
(3).利用胡克定律,得到补充方程;
(4). 联立求解
例 一平行杆系,三杆的横截面面积、长度和弹性模量均
分别相同,用A、l、E 表示。设AC为一刚性横梁,试求在
荷载F 作用下各杆的轴力
解: (1)受力分析--平衡方程
FN1 A FN2 B D F FN3
l
1
a
2
BF
BB
FB为正,表明其方向与图中所设一致.
例 设l,2,3杆用铰连接如图,1、2两杆的长度、横截面面 积和材料均相同,即l1=l2=l,A1=A2 =A , E1= E2=E;3杆长度
为l3 ,横截面面积为A3,弹性模量为E3 。试求各杆的轴力
B
1
D
3 2
C
解:一次超静定问题 (1)力:由节点A的平衡条件列出平衡方程
往是必需的,并不是多余的
•超静定的求解:根据静力学平衡条件确定结构的超静定次数, 列出独立的平衡方程;然后根据几何、物理关系得出需要的
补充方程;则可求解超静定问题。
•补充方程:为求出超静定结构的全部未知力,除了利用平衡 方程以外,还必须寻找补充方程,且使补充方程的数目等于
多余未知力的数目。
•根据变形几何相容条件,建立变形几何相容方程,结合物理 关系(胡克定律),则可得出需要的补充方程。 •补充方程的获得,体现了超静定问题的求解技巧。本章节我 们将以轴向拉压、扭转、弯曲的超静定问题进行说明。
(3)胡克定理
F l l1 N1 EA
FN 3l cosa l3 E3 A3
(4)得出补充方程 EA FN1 FN3 cos2 a E3 A3
l
3
联立平衡方程、补充方程,求解得
FN1 FN 2
F E3 A3 2 cosa EAcos2 a
FN 3
F EA 1 2 cos3 a E3 A3
§6.2 拉压超静定问题
1、拉压超静定问题解法 例 两端固定的等直杆 AB,在 C 处承受轴向力F
F A
A
如图,杆的拉压刚度为 EA,求杆的支反力。
解:一次超静定问题 (1)力:由节点 A 的平衡条件列出 杆轴线方向的平衡方程
F
C
B
FA FB F 0
F B
b
l
a
(2)变形:变形协调条件(求补充方程) 可选取固定端 B 为多余约束,予以解除,在该处的 施加对应的约束反力FB,得到一个作用有原荷载和 多余未知力的静定结构 --称为原超静定结构的基本静定系或相当系统 注意原超静定结构的 B 端约束情况,相当系统要保持 和原结构相等,则相当系统在 B 点的位移为零。 即得变形协调条件