三次B样条曲线
一类双参数拟均匀三次B样条曲线

4 实例
本 文构 造 的双 参 数 曲线具 有 三次 均 匀 样 条 曲线 的 很 多优 点 , 且 有其 自身 的优 点 , 数取 值 越大 越 而 参
5 9
B2 3
,
B3 3
,
( ( 争 4 丁—) 1}告 } +卜( 2 Tt 2 抖 一 ) 一 = + ¨ 十 一A - . T (= 一 ( ( } 争 ) )争 一
2 带双 参 数 的三 次 均 匀 样 条 基 函数 的 性质
①归 一性 ∑B,)1 it . = (
现 对 曲 线 形 状 进 行 更 大 限 度 的 灵
A # 0为点 线 ; - = 为 划 线 : =- - Ai I r A : . 实 线 ‘ 1 5为 取不 同值 时 对 图 形 的 影 响 图 1 两参数相等 。
A= , . 点线 ; 15, 一1 5为 仁1 A: . 仁一l为 划线 ;
靠 近控 制 多边 形 , A ≥1时 , 当 比三 次 均 匀 B样 条 曲线 更 靠 近 控 制 多 边 形 . 外 , 时 , 另 A≠ 曲线 可往 两 端
控制 点 方 向移 动 :
A 时, 图形 往 第
一
个 控 制 点 方 向
偏 移 ; 时 , A 往 最 后 一 个 控 制 点 方 向偏 移 . 以 实 可
收稿 日期 :0 1 0 — 9 2 1- 3 2
基 金项 目 : 西 _ 学 院硕 士基 金 项 目(0 5 1 资 助 . 广 - 1 2 506 )
作 者 简 介 : 泉 华 , 教 。 士 , 究 方 向 : 法 分 析 与 设 计 , 形 图像 处 理 。— i: eq a h aio i 6 .o . 韦 助 硕 研 算 图 E ma w iun uxad@13cr l n
三次样条曲线推导过程

三次样条曲线推导过程三次样条曲线是一种常用的曲线插值方法,可以通过一系列已知控制点来生成平滑的曲线。
下面是推导三次样条曲线的基本过程:1.整理控制点:给定一组已知控制点P0, P1, P2, ..., Pn,其中每个点Pi的坐标为(xi, yi)。
我们的目标是找到一个曲线函数C(t),其中t的范围在[0, 1]之间。
2.定义曲线段:将整个插值范围[0, 1]划分为一系列曲线段,每个曲线段由相邻的两个控制点构成。
我们有n个控制点,则会有n个曲线段。
3.插值求解:对于每个曲线段,我们希望找到一条插值曲线,使得该曲线通过两个相邻控制点,并且在相邻曲线段的连接处保持平滑。
4.建立方程:为了推导每个曲线段的曲线方程,我们需要定义一些参数。
引入参数t,其中t的范围为[0, 1]。
假设我们有一个曲线段的控制点Pi和Pi+1。
我们需要定义两个参数h和u,其中h = xi+1 - xi,u = (t - xi) / h。
5.插值方程:通过插值方法,我们可以得到曲线段的插值方程。
一个典型的三次样条曲线方程为: C(t) = (1 - u)^3 * P_i+ 3 * (1 - u)^2 * u * P_i+1 + 3 * (1 - u) * u^2 * P_i+2 + u^3 *P_i+3这个方程表示了在t范围内从Pi到Pi+3的曲线。
对每个相邻的控制点对应的曲线段都应用相同的方法,然后将它们拼接在一起,就可以得到整个三次样条曲线。
请注意,以上是三次样条曲线的简化推导过程,实际的推导可能会涉及更多的数学推导和符号表示。
基于三次B样条曲线拟合的主车轨迹预测算法的研究

基于三次B样条曲线拟合的主车轨迹预测算法的研究作者:邓琬云曲延羽杨子钰林智桂廖尉华来源:《汽车与驾驶维修(维修版)》2021年第11期中图分类号:U463.6 文献标识码:A0引言自适应巡航控制功能(Adaptive Cruise Control,简称ACC)是利用摄像头、雷达等传感器识别周围环境,从前方众多目标中选择一个有效目标,作为本车需要跟随的目标。
然后系统通过控制驱动和制动系统调整车速,使本车和有效目标之间保持一定的安全距离,从而达到提升车辆主动安全能力和舒适性的目的。
ACC功能的系统框架如图l所示,其中,选择有效目标模块、速度控制模块及距离控制模块皆由选择有效目标模块决定。
当选择有效目标模块检测到前方探测范围内不存在有效目标时,则按照驾驶员设定的巡航速度进行定速控制;当选择有效目标模块检测到前方存在有效目标时,则按照驾驶员设定的安全距离进行跟随控制。
通常选择有效目标的策略是预测主车行驶轨迹,在预测轨迹上选择较近目标作为前方有效目标。
所以,主车轨迹预测算法是ACC功能中识别前方有效目标的重要环节。
1主车轨迹预测算法介绍当前常用的主车轨迹预测算法包括定曲率识别算法、基于前方目标拟合车道线算法和基于前方目标和主车轨迹分两段预测主车行驶轨迹算法等。
定曲率识别算法计算简单,它将当前车头所指方向作为主车预期行驶轨迹,此方法导致主车行驶在弯道时会存在严重的误差。
基于前方目标拟合车道线算法是将前方不同目标的运动轨迹进行融合得到主车预期行驶轨迹,但在交叉路口、车辆换道等复杂工况下,不能体现出很好的适应性。
用两段回旋線预测主车行驶轨迹的算法是将主车预期轨迹分为两段,近端由主车行驶轨迹的历史状态拟合得出,远端由前方车辆行驶轨迹的历史状态拟合得出,该方法的预测准确性较高,但由于要充分保证分段点处的曲率一致性,分段点较难选取。
上述算法普遍使用主车行驶轨迹和目标轨迹对主车预期行驶轨迹进行拟合,但忽略了在行驶过程中车道信息对预期轨迹的影响。
三次B样条曲线
P(1/2)=1/2[P1+1/2(P1P0+P2)]
P(0)=2(P1-P0) P(1/2)
P'(1/2)
P(1)=2(P2-P1)
n
P(t) Pi Bi,n (t) i0
(0 ≤ t ≤ 1)
式中:Pi:为各顶点的位置向量 Bi,n(t):为伯恩斯坦基函数
伯恩斯坦基函数的表达式为:
Bi,n (t )
n! i!(n
ti i)!
(1 t ) ni
假如规定:0=1,0!=1,则 t=0: i=0 ,Bi,n(t)=1
法国的 Bezier 为此提出了一种新的 参数曲线表示方法,因此称为Bezier 曲线。后来又经过 Gordon、Forrest 和 Riesenfeld等人的拓广、发展, 提出了B样条曲线。
这两种曲线都因能较好地适用于 外形设计的特殊要求而获得了广泛的 应用。
一、Bezier曲线
Bezier曲线的形状是通过一组多边折
(均出现 0 的非 0 次幂)
t=0
P' (0) P' (t 0) n(P1 P0 )
同理可得,当 t=1 时
P ' (1) n(Pn Pn1 ) 这两个式子说明:Bezier曲线在两端 点处的切矢方向与特征多边形的第一 条边和最后一条边相一致。
2.二次和三次Bezier曲线
(而在外形设计中,局部修改是随时要进行的)
为了克服 Bezier 曲线存在的问题, Gordon 等人拓展了 Bezier曲线,就 外形设计的需求出发,希望新的曲线 要: 易于进行局部修改;
三次周期B样条曲线的算法
(2)的矩阵的形式:p0 = pN, pN+1 = p1.
4 1 1 4 1 1 4 1 1 4 1 … 1 1 p1 p2 . . . pN-1 pN Q1 Q2 . . . QN-1 QN
=6
1 4 1 1 4
(3)的矩阵的形式:p0 = p1, pN+1 = pN.
6 -6 1 4 1 1 4 1 1 4 1 … 1 4 1 6 -6 p0 p1 p2 . . . pN pN+1 0 Q1 Q2 . . . QN-1 QN 0
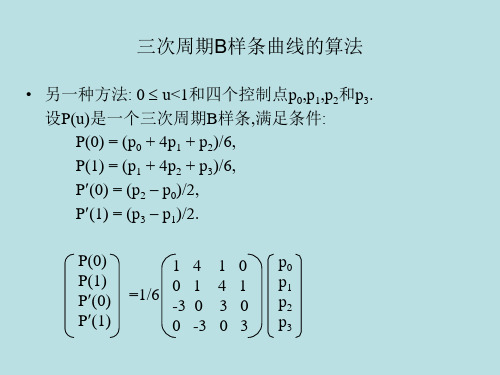
P′(u) = 1/6(3u2 2u 1)
-1 3 -3 1 = ½ (u2 u 1) 2 -4 2 0 -1 0 1 0
P′′(u) = (u 1) -1 3 -3 1 1 -2 1 0
p0 p1 p2 p3
三次B样条的性质
• C2连续性 记 Pk(u)为对应于控制点pk, pk+1,pk+2 和pk+3. Pk(1) = (pk + 4pk+1 + pk+2)/6 = Pk+1(0),这是连续性 Pk′(1) = ½ (pk+3 – pk+1) = Pk+1′(0),这是C1连续性 Pk′′(1) = pk+1 -2pk+2 +pk+3 = Pk+1′′(0),这是C2连续性
基于三次B样条曲线拟合的智能车轨迹跟踪算法
D O I:10.11772/j .issn.1001-9081.2017102563
基于三次B 样条曲线拟合的智能车轨迹跟踪算法
张永华、杜 煜 2' 潘 峰 2, 魏 岳 3 ( 1 .北京联合大学智慧城市学院,北 京 100101; 2 . 北京联合大学机器人学院,北 京 100101;
3 . 保定学院物理与电子工程系,河 北 保 定 071000) ( * 通信作者电子邮箱duyu@ buu. edu. cn)
关键词 :智能车;轨迹跟踪算法; 三 次 B 样条曲线拟合;切向角
中图分类号:TP301.6 文献标志码:A
Intelligent vehicle path tracking algorithm based on cubic B-spline curve fltting
ZHANG Yonghua1, DU Yu2% PAN Feng2, WEI Yue3
摘 要 :针对传统几何轨迹跟踪算法切向角获取依赖高精度惯导设备的问题,提 出 了 基 于 三 次 B 样条曲线拟合
的轨迹跟踪算法。首 先 ,通过对先验地图中的离散轨迹点进行拟合生成平滑轨迹线;然 后 ,根据轨迹方程通过插值法
重新生成离散路点,并计算各个路点处的切向角,从 而 实 现 了 对 多 传 感 器 融 合 轨 迹 的 优 化 与 跟 踪 。在真实的智能车 实验平台上,用所提算法对20 k m /h 低 速 绕 圈 和 60 k m /h 较高速度直道两种典型场景进行了在真实道路下的跟踪测 试 。在低速大曲率和较高速度直道两种典型场景下,所提算法轨迹跟踪的最大横向误差均保持在0.3 m 以内。 实验 结 果 表 明 ,该 算 法 有 效 解 决 了 传 统 几 何 轨 迹 跟 踪 算 法 对 惯 导 设 备 依 赖 的 问 题 ,同 时 保 持 了 较 好 的 跟 踪 性 能 。
三次B--样条曲线局部形状调整问题的研究的开题报告

三次B--样条曲线局部形状调整问题的研究的开题报告1.研究背景B样条曲线是计算机图形学中最常用的曲线表示方法之一,具有插值平滑、局部控制和弹性变形等优点,应用于许多领域。
然而,B样条曲线同样存在一些问题,如过拟合、局部形状不满足特定要求等。
因此,局部形状调整成为了B样条曲线研究的一个重要方面。
2.研究问题本课题旨在研究三次B样条曲线局部形状调整问题,具体包括:(1)了解三次B样条曲线的基本原理与相关算法;(2)分析三次B样条曲线局部形状调整的方法和策略;(3)设计并实现一种基于控制多项式的三次B样条曲线局部形状调整算法,并与其他算法进行对比分析;(4)应用实例验证算法的有效性和实用性。
3.研究内容和方法(1)三次B样条曲线基本原理和算法介绍三次B样条曲线的定义、性质及其计算公式,并进行代码实现,通过实例演示其插值平滑和局部控制特点。
(2)局部形状调整方法和策略探讨三次B样条曲线局部形状调整的方法和策略,包括节点权重法、多项式基函数法、节点移动法等,分析各方法的优缺点。
(3)基于控制多项式的局部形状调整算法基于控制多项式的方法提出一种三次B样条曲线局部形状调整算法,设计算法流程和具体计算方式,并编写程序实现。
(4)性能及实用性分析通过与其他局部形状调整算法的对比试验,评估新算法的优越性与实用性,并通过实例应用验证其有效性。
4.研究意义和预期结果(1)本研究将深入探讨三次B样条曲线局部形状调整问题,提出一种基于控制多项式的新方法,为三次B样条曲线的优化和应用提供参考。
(2)预期结果为一种高效、实用的三次B样条曲线局部形状调整算法,并通过应用实例验证其有效性和实用性,可为三次B样条曲线相关领域的研究和应用提供一定参考价值。
三次b样条插值曲线的节点矢量
三次b样条插值曲线的节点矢量B样条曲线是一种用于插值和逼近的数学工具,其优点在于能够产生光滑的曲线,并且对原始数据的变化具有较好的适应性。
节点矢量是B样条插值曲线中的一个重要概念,本文将介绍三次B样条插值曲线的节点矢量,并对其原理和应用进行详细讲解。
首先,我们先来了解一下什么是B样条曲线。
B样条曲线是一种参数曲线,它是由一些称为控制点的点来定义的。
通过调整控制点的位置和权重,我们可以改变曲线的形状和特性。
其中,节点矢量是B样条曲线中的一个关键概念,它确定了控制多项式的分段区间。
在三次B样条插值曲线中,我们通常将曲线分成一些小的片段,每个片段由四个控制点来定义。
节点矢量可以看作是一个有序的数列,其中的元素决定了每个片段的长度。
具体而言,节点矢量中的每个元素代表一个节点值,节点值决定了一个控制多项式的作用范围。
节点值的个数通常比控制点的个数多一个,这是为了保证曲线的连续性和光滑性。
节点矢量的构造方法有多种,其中一种常用的方法是等间距节点矢量。
在等间距节点矢量中,节点值之间的间隔是均匀的,即每个节点值的差值相等。
例如,如果有n个控制点,则等间距节点矢量可以表示为:[t0, t1, t2, ..., tn] = [0, 1, 2, ..., n]另一种常用的节点矢量是端点重复节点矢量。
在端点重复节点矢量中,首尾的节点值重复出现,而中间的节点值则是等间距分布的。
这种节点矢量的好处是可以保证曲线在端点处的光滑性。
例如,如果有n个控制点,则端点重复节点矢量可以表示为:[t0, t1, t2, ..., tn] = [0, 0, 1, 2, ..., n-1, n, n]除了等间距节点矢量和端点重复节点矢量之外,还有一些其他的节点矢量构造方法,如强度矢量和均匀紧急矢量等。
这些方法基本上都是为了满足不同的曲线需求和控制点配置。
在实际应用中,节点矢量的选择对于曲线的形状和特性有着重要的影响。
较小的节点间隔可以产生更精细的曲线,但是也会增加计算量;较大的节点间隔可以提高计算效率,但是会导致曲线的精度下降。
过控制的三次B样条曲线概要

过控制的三次B样条曲线
不久由前于工作的须要,要进行三次B样条曲线的编写。
在网上找了很多的资料,但是这个资源少的可怜,没有现成的代码和例子程序。
只有一些数学实现方式的文章,在这里对这些文章的作者表示十分的感谢。
下面就把我的程序拿出来和VC知识库的朋友们讨论一下。
程序的行为很简单只是通过鼠标的交互操作来完成一条三次B样条曲线的绘制过程。
在这里用鼠标左鍵的点击完成曲线的绘制。
用右键完成新控制点的加入和对已有控制点的移动。
传统的B样条曲线是不过控制点,在这里把鼠标点击的点作为控制点来看。
要想让曲线经过我们的鼠标点,就要找出一组新的控制来完成曲线的绘制,并经过我们的鼠标点。
这是一个反求过程。
通过一组鼠标点反求出一组控制点来。
这个任务由一个线性方程组来完成。
这里我用sdk编写的程序。
因为我是用Qt写程序的,VC知道的不多啊!羡慕用VC的朋友啊。
程序中还有很多不足的地方。
比如方程组的求解过程应是可以增量进行的。
希望大家多提意见。
参考资料:
林意, 熊汉伟, 骆少明, 张湘伟的<<过控制顶点的B样条曲线>> 在程序包里我也给出了他们的文章。
( 非常感谢他们!希望我还没有侵权,呵呵~~)
我的邮箱:Error_110@。
基于三次b样条曲线轨迹优化代码
基于三次B样条曲线轨迹优化代码一、引言本文将讨论基于三次B样条曲线的轨迹优化代码。
首先,我们将介绍三次B样条曲线的基本原理和特点。
然后,我们将探讨如何使用三次B样条曲线来进行轨迹优化。
最后,我们将介绍一些实际案例,展示三次B样条曲线轨迹优化的应用。
二、三次B样条曲线的基本原理和特点2.1 三次B样条曲线的定义三次B样条曲线是一种参数化曲线,它由一系列的控制点和节点向量定义。
节点向量是一个非递减的序列,控制点则决定了曲线的形状。
2.2 三次B样条曲线的特点三次B样条曲线具有以下特点: - 局部控制性: 三次B样条曲线的形状仅由其局部的控制点决定,不受其他点的影响。
这使得我们可以在不改变整体形状的情况下进行局部编辑。
- 光滑性: 三次B样条曲线在连接点处具有连续的一阶和二阶导数,因此曲线较为平滑。
- 灵活性: 通过调整控制点的位置,我们可以改变曲线的形状和弯曲程度。
这使得三次B样条曲线成为了一种强大的曲线表示方法。
三、使用三次B样条曲线进行轨迹优化3.1 轨迹优化的目标轨迹优化的目标是找到一个满足特定条件的最佳路径。
在机器人控制和动画制作中,轨迹优化通常用于生成平滑且效果良好的运动轨迹。
使用三次B样条曲线进行轨迹优化可以帮助我们实现这一目标。
3.2 轨迹优化算法轨迹优化算法的基本思路是通过调整控制点的位置来改变曲线的形状,以满足特定的优化目标。
常见的轨迹优化算法包括梯度下降、遗传算法等。
使用三次B样条曲线进行轨迹优化的步骤如下: 1. 定义问题:明确轨迹优化的目标和约束条件。
2. 初始化控制点:在给定的曲线上选择一些初始控制点。
3. 计算误差:根据优化目标和约束条件,计算出当前轨迹的误差。
4. 更新控制点:使用优化算法调整控制点的位置,以减小轨迹的误差。
5. 重复步骤3和4,直到达到预设的收敛条件。
3.3 轨迹优化的应用轨迹优化在许多领域都有广泛的应用,包括机器人控制、动画制作、计算机辅助设计等。
珩磨机运动控制卡的三次B样条曲线插补算法

珩磨机运动控制卡的三次B样条曲线插补算法张万军;胡赤兵;张峰;张国华;龚俊【摘要】Numerical control honing machine in machining of the complex curve and the curved surface, control system usually with TMS320F2812 chip as the core, the design of DSP motion control card timer interrupt control servo motor to complete interpolation. This paper introduces a method using DSP motion control card for three B spline curve interpolation methods, this method can not only shorten the interpolation time, also can be controlled by motion control card interrupt timer to adjust interpolation. The last example shows that, the interpolation algorithm not only meet the control requirements, but also meets the requirements of high speed and high precision interpolation.%数控珩磨机在加工复杂曲线曲面时,控制系统通常以TMS320F2812芯片为核心,设计DSP运动控制卡的定时器控制中断控制伺服电动机来完成插补.介绍了一种利用DSP运动控制卡进行三次B样条曲线的插补方法,该方法不仅可以缩短插补时间,也可以通过控制运动控制卡定时器中断来调整插补轨迹.最后实例表明,该插补算法不仅满足运动控制的要求,而且也满足了高速高精度插补的要求.【期刊名称】《制造技术与机床》【年(卷),期】2012(000)008【总页数】3页(P80-82)【关键词】运动控制;实时插补;三次B样条曲线;插补算法【作者】张万军;胡赤兵;张峰;张国华;龚俊【作者单位】兰州理工大学机电工程学院,甘肃兰州730050;兰州工业化设备有限公司,甘肃兰州730050;兰州理工大学数字制造技术与应用省部共建教育部重点实验室,甘肃兰州730050;兰州理工大学机电工程学院,甘肃兰州730050;兰州工业化设备有限公司,甘肃兰州730050;兰州理工大学机电工程学院,甘肃兰州730050;兰州工业化设备有限公司,甘肃兰州730050;兰州理工大学数字制造技术与应用省部共建教育部重点实验室,甘肃兰州730050【正文语种】中文【中图分类】TP391.44在数控珩磨机加工中,经常会遇到如飞机机翼、飞机叶轮等许多具有复杂外形轮廓的零件。
三次b样条曲线rrt算法详解

三次b样条曲线rrt算法详解三次B样条曲线是一种常用于曲线插值和平滑的数学方法。
而RRt 算法是一种基于树结构的路径规划算法。
本文将详细介绍三次B样条曲线和RRt算法的原理及应用。
我们先来了解一下三次B样条曲线。
B样条曲线是一种由多个控制点确定的曲线,它具有良好的局部性质和平滑性。
而三次B样条曲线是指B样条曲线中每个控制点的自由度为3,即可以确定一个点的位置和两个方向。
这使得三次B样条曲线更加灵活和精确。
三次B样条曲线的构造过程可以简单描述为以下几步:首先,根据给定的控制点,确定每个控制点的位置和方向。
然后,通过插值或逼近的方法,计算出曲线上的所有点的坐标。
最后,根据需要,可以对曲线进行平滑处理或者进行局部调整。
三次B样条曲线的应用非常广泛。
在计算机图形学中,它常用于曲线的绘制和形状的变形。
在工程设计中,它常用于曲线的建模和路径规划。
在动画制作中,它常用于曲线的运动轨迹生成。
总之,三次B样条曲线是一种非常重要和实用的数学工具。
接下来,我们来介绍一下RRt算法。
RRt算法是一种基于树结构的路径规划算法,它通过不断扩展树结构来搜索最优路径。
RRt算法的基本思想是从起点开始,随机采样一个点,然后通过最近邻搜索找到树中离该点最近的节点。
然后,利用运动模型或者其他方法,将该点与最近节点连接起来,形成一条新的路径。
不断重复这个过程,直到找到终点或者达到搜索次数的限制。
RRt算法的优点是可以在高维空间中搜索最优路径,适用于复杂环境和非线性约束。
它也可以用于动态环境下的路径规划,通过不断更新树结构来适应环境的变化。
此外,RRt算法还具有较好的实时性能,可以在较短的时间内找到可行路径。
RRt算法的应用非常广泛。
在机器人领域,它常用于自主导航和路径规划。
在无人机领域,它常用于航迹规划和避障。
在虚拟现实和游戏开发中,它常用于角色行为的规划和控制。
总之,RRt算法是一种非常重要和实用的路径规划算法。
三次B样条曲线和RRt算法是两种不同领域的数学方法,分别用于曲线插值和路径规划。
三次B样条曲线的公式算法

The Spline curve in IDL of the import and export
Abstract: By introducing the Interactive Data language and spline curve, The rise in the language of the need for import and export, And the achievement of pay, Finally, in the process of the realization of the specific issues outlook.
样条曲线不仅通过各有序型值点
并且在各型值点处的一阶和二阶导数连续
也即该曲线具有连续的、曲率变化均匀的特点
非均匀有理 B 样条曲线(NURBS)
是一种用途广泛的样条曲线
它不仅能够用于描述自由曲线和曲面
而且还提供了包括能精确表达圆锥曲线曲面在内各种几何体的统一表达式
自1983年
SDRC公司成功地将NURBS模型应用在它的实体造型软件中
currobj->getproperty,data=temp
n=(size(temp))[2]
line.vertices=ptr_new(temp)
currobj->getproperty,polylines=temp
nt=n_elements(temp)
currobj->getproperty,color=cl
图1 样条曲线的导入效果图
3 IDL中样条曲线的导出
三次B样条曲线
0
1
PP32
t 0, 1
三次B样条曲线
➢ 性质1:端点位置
P0,3
(0)
1 6
( P0 4 P1 P2 )
1 3
P0
2
P2
2 3
P1 ,
P0,3
(1)
1 6
( P1 4 P2 P3 )
1 3
P1
2
P3
2 3
P2 ,
➢ 性质2:端点切矢及二阶导数
P
0,3(0)
其中,基函数 Gi,n (t) 定义为:
Gi,n (t)
1 n!
ni j 0
(1)
j
Cnj1 (t
n i
j)n
t [0,1], i 0数,字1,图.像..处,n理
B 样条曲线示例
二次B 样条曲线示例
数字图像处理
B 样条曲线示例
二次B 样条曲线示例
数字图像处理
B 样条曲线示例
三次B 样条曲线示例
样条基函数:
1 , Bi,1(t) 0 ,
ti t ti1 otherwise
Bi,k (t)
t ti tik 1 ti
Bi,k 1(t)
tik t tik ti1
Bi1,k 1(t)
t
数字图像处理
非均匀 B 样条曲线
➢ 设P1, P2 ,...Pn (n k)为给定空间的n个点,称下列参 数曲线
0)
S
(k
)
(
x i
1
0),
k 0,1,
2
2
(3)满足插值条件 yi S ( xi ), i 0,1,..., n.
数字图像处理
一种三次均匀B样条曲线的轨迹规划方法

一种三次均匀B样条曲线的轨迹规划方法
毛征宇;刘中坚
【期刊名称】《中国机械工程》
【年(卷),期】2010(021)021
【摘要】针对复杂曲线的数控加工,提出一种新的插补方法.首先采用一种三次B样条曲线的重叠拼接算法实时地对复杂曲线进行拟合,进而综合弓高误差、速度和加速度等因素,给出具有自适应调整能力的插补步长确定算法,该算法在提高轮廓加工精度的同时,可减小加工过程中的冲击.最后,对插补周期内节点的轨迹进行了规划,以确保运动轨迹满足速度、加速度以及加加速度的平滑约束条件.仿真实验结果表明,该方法在实时插补过程中,可以保证复杂曲线插补加工的高速与高精度,且具有很好的速度、加速度以及加加速度平滑性.
【总页数】5页(P2569-2572,2577)
【作者】毛征宇;刘中坚
【作者单位】湖南科技大学,湘潭,411201;湖南科技大学,湘潭,411201
【正文语种】中文
【中图分类】TG659;TP273
【相关文献】
1.两相邻三次非均匀B样条曲线近似合并的一种方法 [J], 梁清清
2.一种三次非均匀B样条曲线的细分算法 [J], 杨恢先;蔡晓雯;汤安平;蒋海军
3.一种三次均匀B样条曲线快速反算的方法 [J], 李道军;邬向伟
4.基于曲率单调变化的空间非均匀三次B样条曲线的构造方法 [J], 王爱增; 何川; 赵罡
5.基于三次非均匀B样条曲线的机器人轨迹规划算法研究 [J], 赖永林;林茂松;梁艳阳
因版权原因,仅展示原文概要,查看原文内容请购买。
三次b样条曲线rrt算法详解
三次b样条曲线rrt算法详解三次B样条曲线是一种重要的曲线表示方法,在计算机图形学等领域被广泛应用。
其中rrt算法是一种基于三次B样条曲线的曲线拟合算法。
下面将详细介绍rrt算法的原理和实现过程。
1. 三次B样条曲线三次B样条曲线是由一系列控制点构成的曲线,它是通过插值和逼近方法进行构造的。
三次B样条曲线的定义如下:$$C(t) = \sum_{i=0}^n P_iB_{i,3}(t)$$其中,$P_i$为控制点,$B_{i,3}(t)$为三次B样条曲线基函数。
三次B样条曲线基函数的定义如下:$$B_{i,3}(t) =\frac{1}{6}(\delta_{i,3}(t)+3\delta_{i,2}(t)+3\delta_{i,1}(t)+\delta_{i,0}(t))$$其中,$\delta_{i,j}(t)$为Kronecker delta函数,定义如下:$$\delta_{i,j}(t) = \begin{cases} 1, & \text{if } t = j \\ 0, & \text{otherwise} \end{cases}$$三次B样条曲线在$t\in[0,n-2]$的区间上是具有两个连续二阶导数的光顺曲线,可以拟合各种形状的曲线,包括圆弧、椭圆、三角形、四边形等。
2. RRT算法RRT(Rapidly-exploring Random Tree)算法是一种用于路径规划的随机采样算法。
该算法将搜索空间分为两个区域:障碍区域和自由区域。
通过随机采样的方式,将自由区域逐渐探索并建立一个尽可能大的树形结构。
RRT算法的基本步骤如下:- 初始化RRT树,将起点作为树的根节点。
- 随机采样一个点,判断是否在自由区域内。
- 查找树上距离最近的节点,将其连接到采样点。
- 重复步骤2和3,直到找到终点为止。
3. RRT算法在三次B样条曲线拟合中的应用在三次B样条曲线拟合的问题中,我们需要找到一条曲线,使得曲线能够穿过一系列给定的控制点,并且在这些控制点间具有平滑的连续性。
三次B样条曲线
所以,根据式:
P(t )
PB
i 0 i
n
i ,n
(t )
二次 Bezier 曲线的表达形式为:
P(t)=(1-t)2P0+2t(1-t)P1+t 2 P2 (0≤t ≤ 1)
根据 Bezier 曲线的总体性质,可讨 论二次 Bezier 曲线的性质: P(t)=(1-t)2P0+2t(1-t)P1+t2 P2 P’(t)=2(t-1)P0+2(1-2t)P1+2tP2 P(1/2)=1/2[P1+1/2(P0+P2)] P(0)=2(P1-P0) P(1)=2(P2-P1) P(1/2)=P2-P0
' '
同理可得,当 t=1 时
P (1) n( Pn明:Bezier曲线在两端 点处的切矢方向与特征多边形的第一 条边和最后一条边相一致。
2.二次和三次Bezier曲线 (1) 三个顶点:P0,P1,P2 可定义一条 二次(n=2) Bezier曲线: 其相应的混合函数为:
B (t ) n[Bi 1,n1 (t ) Bi,n1 (t )]
' i ,n
得:
P ' (t ) n P i [ Bi 1, n 1 (t ) Bi , n 1 (t )]
i 0 n 1
讨论:
(n 1)! Bi 1, n 1 (t ) t i 1 (1 t ) n 1i (i 1)! ( n i )! (n 1)! Bi , n 1 (t ) t i (1 t ) n 1i i!( n 1 i )!
法国的 Bezier 为此提出了一种新的 参数曲线表示方法,因此称为Bezier 曲线。后来又经过 Gordon、Forrest 和 Riesenfeld等人的拓广、发展, 提出了B样条曲线。 这两种曲线都因能较好地适用于 外形设计的特殊要求而获得了广泛的 应用。
非均匀三次B样条曲线插值的Jacobi-PIA算法

非均匀三次B样条曲线插值的Jacobi-PIA算法1. 引言介绍什么是三次B样条曲线以及其在图形学中的应用,引出非均匀三次B样条曲线插值问题,并说明Jacobi-PIA算法是解决该问题的一种重要方式。
2. 非均匀三次B样条曲线的插值方法对非均匀三次B样条曲线插值方法进行介绍,包括插值节点选取、插值多项式构造、插值系数求解等内容。
3. Jacobi-PIA算法的原理分析Jacobi-PIA算法的基本原理,包括如何构造Jacobi矩阵、如何计算PIA基函数、如何求解插值系数等。
4. Jacobi-PIA算法实现与分析详细介绍Jacobi-PIA算法的实现过程,包括插值节点的选取、插值多项式的构造、Jacobi矩阵和PIA基函数的计算、插值系数的求解等。
同时,对Jacobi-PIA算法进行分析,包括精度、稳定性、计算效率等方面。
5. 实验结果与结论通过实验对Jacobi-PIA算法进行验证,对比其他方法进行分析,得出结论:Jacobi-PIA算法不仅具有较高的精度和稳定性,而且计算效率也相对较高,在非均匀三次B样条曲线插值问题中具有广泛的应用前景。
同时,提出了进一步完善该算法的思路和方法。
第1章节:引言在现代数学和计算机科学中,三次B样条曲线是一类重要的数学工具,其在图形学、CAD以及计算机动画等领域中得到广泛应用。
三次B样条曲线具有灵活性高、精度高以及计算效率高等优点,在图形学中被广泛地使用。
在B样条曲线中,节点序列与权值序列的选取对样条曲线的性质、控制点以及生成的曲线形状有重要影响。
然而,在实际应用中,很多情况下需要实现非均匀曲线的插值操作,这就需要在一定范围内任意选取插值节点,这可能会导致样条曲线的性质出现一些不可控的变化,这就需要一些特殊的插值方法来解决问题。
本文将介绍如何使用Jacobi矩阵和PIA基函数实现非均匀三次B样条曲线的插值算法,以及如何利用该算法构造出高精度和稳定性的非均匀三次B样条曲线。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数字图像处理
B 样条曲线示例
三次B 三次 样条曲线示例
数字图像处理
B 样条曲线示例
三次B 三次 样条曲线示例
数字图像处理
B 样条曲线示例
四次B 样条曲线示例 四次
数字图像处理
B 样条曲线示例
五次B 五次 样条曲线示例
数字图像处理
2.2 B 样条曲线基函数的性质
B样条函数基函数为:
1 n−i G i ,n (t ) = ( − 1 ) j C nj+ 1 ( t + n − i − j ) n ∑ n! j = 0 t ∈ [ 0 ,1 ], i = 0 ,1 ,..., n
如左图所示,六个 控制顶点控制的三 次B样条曲线由三 段B样条曲线段组 成。其中,每一条 曲线段由四个顶点 控制。
数字图像处理
B 样条曲线的性质
2.几何不变性
由于定义式所表示的B样条曲线是参数形式,因此,和 Bezier曲线一样,B样条曲线的形状和位置与坐标系选 择无关。
3. 连续性
当给定的m+n+1个控制顶点Pi (i=0,1,…,m+n)互不 相重,则所控制的整条B样条曲线具有n-1阶几何连续 (G n-1)。当给定的控制顶点相邻最大重顶点数为h(即h 个控制顶点重合在一起),则整条B样条曲线具有n-h1阶几何连续(G n-h-1)。
数字图像处理
B 样条曲线的性质
4. 对称性
根据B样条曲线的基函数的对称性可推导
Pk , n (1 − t ) = =
∑
n
n
i=0
Pi + k G i , n (1 − t ) Pi + k G n − i , n ( t ) ( t ∈ [ 0 ,1 ])
∑
i=0
它表明了B样条曲线段的起点和终点的几何性质完全 相同。
2.5 三次 样条曲线 三次B样条曲线
取n=3,则有三次B样条曲线的基函数如下:
G 0 , 3 G 1, 3 G 2 , 3 G 3,3 1 ( − t 3 + 3t 2 − 3t + 1), 6 1 (t ) = ( 3t 3 − 6t 2 + 4 ), 6 1 (t ) = ( − 3t 3 + 3t 2 + 3t + 1), 6 1 (t ) = t 3 , 6 (t ) =
y i = S ( xi ) i = 0 ,1 ...n
数字图像处理
,则称S(x)为插值样条函
1.2 三次样条函数
假设在区间〔a,b〕上给定一个分割 ∆: a=x0<x1<…<xn-1<xn=b, 在〔a,b〕上的一个函数S(x)称为插值三次样条函数, 如果满足下列条件: (1)在每一小区间〔xi-1,xi〕(i=1,2,…,n)内S(x)分别 是三次多项式函数; (2)在节点xi(i=1,2,…,n-1)处成立 :
t ∈ [0, 1]
三次B样条曲线 三次 样条曲线
性质1:端点位置
1 1 P + P2 2 P0 , 3 ( 0) = ( P0 + 4 P1 + P2 ) = 0 + P, 2 3 1 6 3 P0 , 3 (1) = 1 ( P1 + 4 P2 + P3 ) = 1 P1 + P3 + 2 P2 , 6 3 2 3
数字图像处理
2.1 B 样条曲线的定义
给定m+n+1个平面或空间顶点 Pi (i=0,1,…,m+n), 称n次参数曲线段 :
Pk ,n (t ) = ∑ Pi + k Gi ,n (t ),
i =0 n
t ∈ [0,1]
为第k段n次B样条曲线段 (k=0,1,…,m),这些曲线段 的全体称为n次B样条曲线,其顶点Pi(i=0,1,…,n+m) 所组成的多边形称为B样条曲线的特征多边形。 其中,基函数 G i , n ( t ) 定义为:
数字图像处理
二次B 二次 样条曲线
3. 当P0,P1,P2三顶点共线时,P0,2(t)(t∈〔0,1〕) 即蜕化为一段直线。 4. 当给定一组顶点P0,P1,…,Pm(m>2),若存在 Pi=Pi+1(0<i≤m-2),则二次B样条曲线经过顶点Pi, 且在此处是尖点。
三点共线的情况
尖点的情况
数字图像处理
曲线和曲面
1. 样条函数的概念
1.1: 一般样条函数的定义 1.2: 三次样条函数 1.3: 二次样条函数
2. B 样条曲线
2.1: B样条曲线的定义 2.2: B样条曲线基函数性 质 2.3: B样条曲线的性质 2.4: 二次B样条曲线
数字图像处理
2.5: 三次B样条曲线 2.6: 二、三次B样条曲线的 应用 2.7: 非均匀B样条曲线
1. 样条函数概念
样条函数的概念是美国数学家I.J.Schoenberg在 1946年首先提出的,他定义了一种B样条函数。尽管有 10年的时间未受到重视,但从60年代开始,随着电子 计算机技术的飞速发展和数据拟合以及函数逼近在生产 实验中的广泛应用,样条函数的理论和应用已迅速发展 成了一门成熟的学科。由于样条(Spline)函数发展的开始, 就具有广泛而又深刻的实用背景,因此,样条函数及其 参数表示形式的曲线和曲面方法是自由曲线与曲面设计 的基础。
数字图像处理
B 样条曲线的性质
5.递推性
n次B样条曲线段的递推曲线表示形式: l=0 Pi + k i Pk ,l (t ) = λ i ,l (t ) Pki,l −1 ( t ) + µ i ,l ( t ) Pki,+1 1 ( t ), l = 1, 2 ,..., n , l−
它具有如下性质: 1. 端点位置:
t ∈ [0,1]
1 P0, 2 (0) = ( P0 + P1 ), 2
2. 端点切矢:
1 P0, 2 (1) = ( P2 + P ) 1 2
数字图像处理
二次B 二次 样条曲线
如左图所示,六个控制 顶点控制的二次B。曲线段的起点 和终点同控制顶点的连 接边相切于连接边的终 点位置。
B 样条曲线的性质
6. 保凸性
B样条曲线和Bezier曲线一样,也具有保凸性。即 当所有的控制顶点形成一个平面凸的闭多边形时, Pk,n(t) 是一条平面凸曲线。
数字图像处理
B 样条曲线的性质
7. 凸包性
当t∈〔0,1〕时,有0≤Gi,n(t)≤1 (i=0,1,…,n) 和
∑G
i =0
n
i ,n
1 n−i G i ,n (t ) = ( − 1 ) j C nj+ 1 ( t + n − i − j ) n ∑ n! j = 0 t ∈ [ 0 ,1 ], i = 0 ,1,..., n
数字图像处理
B 样条曲线示例
二次B 二次 样条曲线示例
数字图像处理
B 样条曲线示例
二次B 样条曲线示例 二次
具有如下性质: 1)有界正性:当 t ∈ [0,1] 时, ≤ Gi,n (t ) ≤ 1, 0 2)权性: 即
(i = 0,1,...,n)
(i = 0,1,...,n)
∑G
i =0
n
i ,n
(t ) ≡ 1,
t ∈[0,1]
3)对称性:当 t ∈ [0,1] 时, i,n (t) = Gn−i,n (1− t), G
B 样条曲线的基函数
三次B 样条曲线的基函数 三次
四次B 四次 样条曲线的基函数
数字图像处理
2.3 B 样条曲线的性质
1. 局部性 局部性
根据定义式可知,第 k 段n次B样条曲线只与 n+1 个 顶点Pi(i=0,1,…,n)有关,因此,当改动其中一个 控制顶点时,只会对相邻的n+1段产生影响,不会对 整条曲线(当 m>> n)产生影响。这就为设计曲线时修 改某一局部的形状带来了很大的方便。
二次B样条曲线段 P0 , 2 (t ) = ∑ Pi G i , 2 (t ) 是一段抛物线。
i=0 2
数字图像处理
二次B 二次 样条曲线
二次B样条曲线的矩阵表示为:
1 1 0 P0 1 P0 , 2 (t ) = [1 t t 2 ] − 2 2 0 P 1 2 1 − 2 1 P2
(t ) ≡ 1 ,因此,根据凸包定义可知,对任何
t∈〔0,1〕,Pk,n(t) 必定在控制顶点构成的凸包之中。
如左图所示,六个控制 顶点控制的三次B样条 曲线由三段B样条曲线 段组成。其中,每一条 曲线段由四个顶点控制 且包含在四个顶点构成 的凸包之中。
数字图像处理
B 样条曲线的性质
8.变差缩减性
S ( k ) ( x i − 0) = S ( k ) ( x i + 0), k = 0,1, 2,
即小区间上的三次多项式函数,在拼接点处xi 具有二阶 连续拼接。 (3)满足插值条件yi =S(xi),i=0,1,…,n.
数字图像处理
1.3 二次样条函数
设定区间〔a,b〕上一个分割Δ: a=x0<x1<…<xn-1<xn=b, 在〔a,b〕上的一个函数S(x)称为插值二次样条函数,如 果满足下列条件:
(1)在每个小区间 x 1 , x 1 i− 2 i+ 2
(i = 0,1,..., n )内,S(x)是二次
多项式函数,这里, xi −1 + xi x 1 = (i = 1,2,..., n), x 1 = x 0 , x 1 = x n ,称为半节点; i− − n+ 2 2 2 2 (2)在半节点 x