EPSON机械手LS系列安装及接线指导书
EPSON LS系列机械手机械原点校准

13
结束
谢谢
14
LS3-401S
LS3-401C
LS6-601S
LS6-602C
6
一、LS系列机械原点调整
1.5 第四轴原点位置,将第二轴前端三角与Z轴平面中心对齐
7
二、原点校准
2.1 先将机械手按照上一节所叙将各轴移动到机械原点处,使机械手呈现如下 姿态,并保持此姿态不变
8
二、原点校准
2.2 打开EPSON软件,连接控制器,先在“工具” “机器人管理器” “控制面板”里将 Motor Off。然后在“工具” “命令窗口” 或单击工具图标“ ”进入命令输入状态。然后在命令窗口输入如下指令 后按回车,复位编码器脉冲值 Encreset 1,2,3,4
Hofs Hofs (1), Hofs (2) + (Ppls(P1,2) + Ppls(P2,2)) /2, Hofs(3), Hofs(4) 4.3 执行完精确校准后,将机械手以右手姿势保存当前点到P2并保存,然后手动将机械 手姿势切换到左手姿势(如果机械手运动范围内可以自动切换姿势可以不用手动切换 姿势,如果有障碍时一定要切换姿势,否则切换姿势时可能会撞到其他设备),然后 再执行以下指令以左手姿势移动到P2点,看机械手末端是否与十字叉重合,如果重 合说明左右手校准成功,如果不重合说明校准有问题重新示教P1、P2点再次校准。 Jump P2 /L
10
三、单独一个轴原点校准
2.5 校准完成后,先将机械手第1轴移动一个位置,然后输入如下指令看第1轴 能否回到原点位置,如不能回到原点位置请重新校准第1轴 Pulse 0,ppls(here,2),ppls(here,3),ppls(here,4) 同理2、3、4轴可以按照以上方法校准 (2、3、4轴可以同时校准,校准过程 要注意将机械手移动到一个第1、2关节可以打直的位置,否则有撞机风险)
EPSON爱普生工业机器人导入及安全培训V2.0

爱普生中国 FA 营业本部 2017年4月
1
目录 一、关于机械手安全使用 二、机械手基础知识和硬件概要 三、EPSON RC+ 用户界面 四、示教 五、SPEL+语言 六、动作指令 七、I/O 八、Pallet 九、!...! 并列处理 十、多任务处理
2
相关法规
法规中工业机器人定义:具有有操作器及记忆装置,基 于记忆 装置的信息,操作器能够伸缩,上下移动,左 右移动或者旋转动作的或者能够自动进行这些动作的组 合起来复合动作的机械。
2.2 Jump 指令
功能:通过“门形动作”使手臂手臂从当前位置移动至目标坐标。 格式:Jump 目标坐标 示例: 图1 1. Jump P1 ´机械手以“门形动作”动作到P1点 2. Jump P1 LimZ -10 ´以限定第三轴目标坐标Z=-10的门形动作移动到P1点,如图1示 3. Jump P1:Z(-10)LimZ -10 ´以限定第三轴目标坐标Z=-10的门形动作移动到P1点位置Z坐标值为-10 的位置 NOTE: Go与Jump的区别Jump与Go都是使机械手手臂用PTP动作移动的命令。但是Jump有Go没有的一个功能。 Jump将机械手的手部先抬起至LimZ 值,然后使手臂水平移动,快要到目标坐标上空的时候使其下降移动。此 动作的标准是可以更准确地避开障碍物这一点,更重要的是通过吸附、配置动作,提高作业的周期时间。 31
28
五、SPEL+语言
3. 变量 SPEL+中有3种不同的变量。 • Local : 局部变量(用在同一Function内使用的变 量) • Module : 模块变量(在同一程序内使用的变量) • Global : 全局变量(在同一项目内使用的变量) (Global Preserve可定义全局掉电保持变量) 4. 变量的数据类型 变量有多种数据类型,使用前先说明类型。 格式:数据类型 变量名。如:Integer i
LS6 EPSON机械手手册

标签
控制器
软件
RC90
EPSON RC+ 7.0
LS3-401* EPSON RC+ 7.0
7.0.1版或更早版本 7.0.2版或更新版本
RC90控制器固件 7.0.2.0版或更新版本
!!! OK
OK: 可连接 可使用EPSON RC+ 7.0与控制器具备的所有功能。
!!!: 可连接 虽然可连接,但推荐使用EPSON RC+ 7.0版本7.0.2或更新版本。
Epson Deutschland GmbH Factory Automation Division Otto-Hahn-Str.4 D-40670 Meerbusch Germany TEL : +49-(0)-2159-538-1391 FAX : +49-(0)-2159-538-3170 E-MAIL : s@epson.de
1.2.1 滚珠丝杠花键的强度 ....................................................................... 5 1.3 操作注意事项.............................................................................................. 6 1.4 紧急停止 ..................................................................................................... 8
1.1 关于正文中的符号 ...................................................................................... 3 1.2 设计与安装注意事项................................................................................... 4
EPSON机械手驱动单元的连接以及语法培训
2. 程序结构
一个SPEL+程序包括有函数,变量和宏指令, 一个项目至少包含有一个程序和一个main函数。 函数以Function开始,Fend结束
程序示例:
Function GetTestSts GetTestSts = G_Test_Sts
Fend '设置取放状态 Function SetGetOrPut(ByVal PutOrGet$ As String)
机械手系的统手构臂成姿势
IO输入
IO输出
执行机构
程序
逻辑控制
机械手 位置
交互 数据
点位 数据
数据
机械手 伺服马达
PART 3
EPSON RC+ 使用与点位示教
通过讲解,能够了解EPSON软件的使用,以及如何连接 控制器进行编程与点位示教等。
三、EPSON RC+ 用户界面
程序列表
机器人控制器 三维模拟器
2.1 SCARA机械手的手臂姿势图
机械手的手臂姿势
2.2.1 垂直6轴型机械手在其动作范围内的点上,可以不同的手臂姿势 使其动作,如下图示:
机械机手械的手手坐臂标姿系势
1.2 垂直6轴型机械手的机械手坐标系
XYZ-UVW U/V/W分别绕Base坐标Z/Y/X旋转.
感应器
机械手 编码器 视觉 通讯
(3) 属性网格
显示机器人和布 局对象的设置。
(6) 记录/回放
记录和复制模拟产品。
PART 4
SPEL+语言简介
SPEL+是EPSON ROBOT专用程序语言。风格类似VB,支持 多任务,动作控制和I/O控制。
四、SPEL+语言概述
爱普生机器人-机械手初级教学

38
CVMove 用Curve 命令执行定义的自由曲线CP 动作。CVMove 执行设定控制器硬盘上
指定直线动作速度和加/减速度,使用Speeds指令和Accels指令。
3.1 Move 指令
功能:以直线轨迹将机械手从当前位置移动到指定目标位置。全关节同时启动,同时停
止。 格式:Move 目标坐标 示例:Move P1 ´机械手以直线轨迹动作到P1点
NOTE:
Move与Go的区别到达目标点时的手臂的姿势重要的时候使用Go命令,但是比控制动作
图标后,进入如下图示画
31
1. 概述
SPEL+是在RC170/180、RC90控制器上运行的与BASIC相近的程序语言。它支持多任务,动作控 制和I/O控制。程序以ASCII文本形式创建,被编辑在可以执行的对象文件中。
2. 程序结构
一个SPEL+程序包括有函数,变量和宏指令,每一个程序以.PRG的扩展名保持到对应的项目里 (Project)。一个项目至少包含有一个程序和一个main函数。函数以Function开始,Fend结 束,函数名可以使用最多32个字符的半角英文数字和下划线,不区分大小写,但是不可以使 用以数字和下划线开始的名称或SPEL+关键字。
17
3. 示教画面
打开Jog&Teach页面: Tools →Robot Manager →Jog&Teach或单击工具栏
图标后,选择Jog&Teach页面。如下图示
LS6 EPSON机械手手册
iv
LS Rev.8
韩国 东南亚 印度 日本
Epson Korea Co., Ltd. Marketing Team (Robot Business) 27F DaeSung D-Polis A, 606 Seobusaet-gil, Geumcheon-gu, Seoul, 153-803 Korea TEL : +82-(0)-2-3420-6692 FAX : +82-(0)-2-558-4271
1.2.1 滚珠丝杠花键的强度 ....................................................................... 5 1.3 操作注意事项.............................................................................................. 6 1.4 紧急停止 ..................................................................................................... 8
LS Rev.8
v
对于欧盟客户
产品上的打叉带轮垃圾桶标签表示不得通过正常的生活垃圾流处理该产品及内置蓄 电池。为防止危害环境或人类健康,请将该产品及其蓄电池与其他废弃物流分开处 理,确保以环保方式对其回收利用。有关可用收集设施的更多信息,请联系当地政 府机构或购买本产品的零售商。使用化学符号Pb、Cd或Hg表示蓄电池中是否使用了 这些金属。 根据2006年9月6日发布的有关蓄电池和蓄能器及废弃蓄电池和蓄能器的欧洲议会和 理事会2006/66/EC号指令以及撤销指令91/157/EEC和将其纳入各国法律系统的法律, 此信息仅适用于欧盟客户。 对于其他国家,请联系当地政府调查回收该产品的可能性。 蓄电池拆卸∕更换程序见以下手册:
EPSON机械手LS系列安装及接线指导书
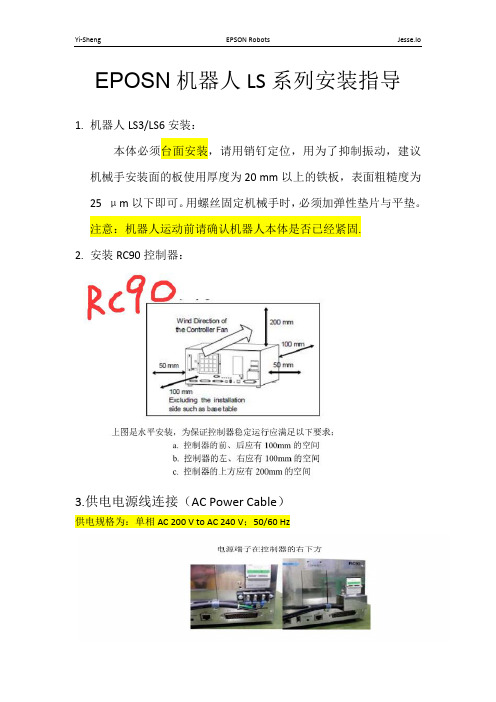
EPOSN机器人LS系列安装指导1.机器人LS3/LS6安装:本体必须台面安装,请用销钉定位,用为了抑制振动,建议机械手安装面的板使用厚度为20 mm以上的铁板,表面粗糙度为25 μm以下即可。
用螺丝固定机械手时,必须加弹性垫片与平垫。
注意:机器人运动前请确认机器人本体是否已经紧固.2.安装RC90控制器:3.供电电源线连接(AC Power Cable)供电规格为:单相AC 200 V to AC 240 V;50/60 Hz4.连接机器人马达电缆(M/C Power Cable)5.连接编码器电缆(M/C Signal cable)6.紧急开关及安全门端子排连接a. 紧急功能接头(25pin)图片:b.急停25pin信号分布表c.急停接线图(如果急停线接错有可能导致主板烧坏):d.常用急停25pin接线图参考:{根据急停接线图,(安全门短接,采用内部24V与0V(pin22~25))}7.I/O(输入输出)接线:a. I/O接头(50pin)图片b.50pin信号配置(共24个输入,16个输出):采用I/O远程控制时,为方便调试,必须有的信号为:输入信号:Pin2:输入No.0 (Start);用于启动机械手运动Pin6:输入No.4 (Stop);用于停止机械手运动Pin7:输入No.5 (Pause) ;用于暂停机械手运动Pin8:输入No.6 (Continue) ;用于继续机械手运动;Pin9:输入No.7 (Reset) ;用于复位机械手的急停,机械手的错误报警信号。
输出信号:Pin10:输出No.0 (Ready) ;用于监控控制器是否上电并启动OKPin11:输出No.1 (Running) ;用于监控机械手程序是否运行Pin12:输出No.2 (Paused) ;用于监控机械手是否暂停Pin13:输出No.3 (Error) ;用于监控机械手是否发生异常报警Pin14:输出No.4 (EstopOn) ;用于监控急停是否被按下或急停故障报错c.输入信号接线:RC90控制器输入电路使用双向光电耦合器,所以可以采用NPN与PNP两种接线方式,输入电流要求: 10 mA TYP/+ 24 V输入时,因此可进行下述2种配线。
EPSON RC+ 7.0 LS系列机器人系统安全与安装说明书
Robot Controller RC90Programming Software EPSON RC+ 7.0Manipulator LS series(LS3 / LS6 / LS20)Robot System Safety and Installation (RC90 / EPSON RC+ 7.0) Rev.13Robot System Safety and Installation(RC90 / EPSON RC+ 7.0)Rev.13Copyright 2013-2020 SEIKO EPSON CORPORATION. All rights reserved Safety and Installation (RC90 / EPSON RC+ 7.0) Rev.13 iFOREWORDThank you for purchasing our robot products.This manual contains the information necessary for the correct use of the robotsystem.Please carefully read this manual and other related manuals before installing therobot system.Keep this manual handy for easy access at all times.WARRANTYThe robot system and its optional parts are shipped to our customers only after beingsubjected to the strictest quality controls, tests, and inspections to certify itscompliance with our high performance standards.Product malfunctions resulting from normal handling or operation will be repairedfree of charge during the normal warranty period. (Please contact the supplier ofyour region for warranty period information.)However, customers will be charged for repairs in the following cases (even if theyoccur during the warranty period):1. Damage or malfunction caused by improper use which is not described inthe manual, or careless use.2. Malfunctions caused by customers’ unauthorized disassembly.3. Damage due to improper adjustments or unauthorized repair attempts.4. Damage caused by natural disasters such as earthquake, flood, etc.Warnings, Cautions, Usage:1. If the robot system associated equipment is used outside of the usageconditions and product specifications described in the manuals, thiswarranty is void.2. If you do not follow the WARNINGS and CAUTIONS in this manual, wecannot be responsible for any malfunction or accident, even if the result isinjury or death.3. We cannot foresee all possible dangers and consequences. Therefore, thismanual cannot warn the user of all possible hazards.ii Safety and Installation (RC90 / EPSON RC+ 7.0) Rev.13TRADEMARKSMicrosoft, Windows, and Windows logo are either registered trademarks ortrademarks of Microsoft Corporation in the United States and/or other countries.Other brand and product names are trademarks or registered trademarks of therespective holders.TRADEMARK NOTATION IN THIS MANUALMicrosoft® Windows® 8 Operating systemMicrosoft® Windows® 10 Operating systemThroughout this manual, Windows 8, and Windows 10 refer to above respectiveoperating systems. In some cases, Windows refers generically to Windows 8, andWindows 10.NOTICENo part of this manual may be copied or reproduced without authorization.The contents of this manual are subject to change without notice.Please notify us if you should find any errors in this manual or if you have anycomments regarding its contents.MANUFACTURERSeiko Epson Corporation3-3-5 Owa, Suwa-shi, Nagano, 392-8502URL :/company/: http://www.epson.jp/prod/robots/Toyoshina PlantRobotics Solutions Operations Division6925 Toyoshina Tazawa,Azumino-shi, Nagano, 399-8285JapanTEL : +81-(0)263-72-1530FAX : +81-(0)263-72-1685Safety and Installation (RC90 / EPSON RC+ 7.0) Rev.13 iiiiv Safety and Installation (RC90 / EPSON RC+ 7.0) Rev.13SUPPLIERS (Country/Region) North & SouthAmericaEpson America, Inc. Factory Automation/Robotics 1650 Glenn Curtiss Street Carson, CA 90746 USATEL : +1-562-290-5910FAX : +1-562-290-5999E-MAIL :*****************.com EuropeEpson Deutschland GmbHRobotic Solutions Otto-Hahn-Str.4 D-40670 Meerbusch GermanyTEL : +49-(0)-2159-538-1800FAX : +49-(0)-2159-538-3170E-MAIL :****************URL: : www.epson.de/robots ChinaEpson (China) Co., Ltd.Factory Automation Division 4F, Tower 1, China Central Place, 81 Jianguo Road, Chaoyang District, Beijing, 100025, PRCTEL : +86-(0)-10-8522-1199FAX : +86-(0)-10-8522-1125TaiwanEpson Taiwan Technology & Trading Ltd.Factory Automation Division 15F., No.100, Song Ren Road., Xinyi Dist., Taipei City, 11073 TaiwanTEL : +886-(0)-2-8786-6688FAX : +886-(0)-2-8786-6600Korea Epson Korea Co., Ltd.Marketing Team (Robot Business)10F Posco Tower, Teheranro 134(Yeoksam-dong)Gangnam-gu, Seoul, 06235KoreaTEL : +82-(0)-2-3420-6632FAX : +82-(0)-2-558-4271Southeast Asia Epson Singapore Pte. Ltd.Factory Automation System1 HarbourFront Place, #03-02,HarbourFront Tower One,Singapore 098633TEL : +65-(0)-6586-5500FAX : +65-(0)-6271-2703India Epson India Pvt. Ltd.Sales & Marketing (Factory Automation)12th Floor, The Millenia, Tower A, No. 1,Murphy Road, Ulsoor, Bangalore,India 560008TEL : +91-80-4566-5000FAX : +91-80-4566-5005Japan Epson Sales Japan CorporationFactory Automation Systems Department29th floor, JR Shinjuku Miraina Tower, 4-1-6Shinjuku, Shinjuku-ku, Tokyo 160-8801JapanTEL :+81-(0)3-5919-5257FAX :+81-(0)3-5919-5402Safety and Installation (RC90 / EPSON RC+ 7.0) Rev.13 vRegarding battery disposalThe crossed out wheeled bin label that can be found on your product indicates that this product and incorporated batteries should not be disposed of via the normal household waste stream. To prevent possible harm to the environment or human health please separate this product and its batteries from other waste streams to ensure that it can be recycled in an environmentally sound manner. For more details on available collection facilities please contact your local government office or the retailer where you purchased this product. Use of the chemical symbols Pb, Cd or Hg indicates if these metals are used in the battery.This information only applies to customers in the European Union, according to DIRECTIVE 2006/66/EC OF THE EUROPEAN PARLIAMENT AND OF THE COUNCIL OF 6 September 2006 on batteries and accumulators and waste batteries and accumulators and repealing Directive 91/157/EEC and legislation transposing and implementing it into the various national legal systems.For other countries, please contact your local government to investigate the possibility of recycling your product.The battery removal/replacement procedure is described in the following manuals:Controller manual / Manipulator manual(Maintenance section)For California customers onlyThe lithium batteries in this product containPerchlorate Material - special handling may apply,See /hazardouswaste/perchlorate.vi Safety and Installation (RC90 / EPSON RC+ 7.0) Rev.13Safety and Installation (RC90 / EPSON RC+ 7.0) Rev.13 viiBefore Reading This ManualTP port of RC90 is for the Teach Pendant TP1 and TP2. Do not connect thefollowings to TP port of RC90. Connecting to the followings may result in malfunction of the device since the pin assignments are different.OPTIONAL DEVICE dummy plugOperation Pendant OP500Operator Pendant OP500RCJog Pad JP500Teaching Pendant TP-3** seriesOperator Panel OP1For RC90, be sure to install the EPSON RC+7.0 to the development PC first, then connect the development PC and RC90 with the USB cable. If RC90 and the development PC are connected without installing the EPSON RC+7.0 to the development PC, [Add New Hardware Wizard] appears. If this wizard appears, click the <Cancel> button.Concerning the security support for the network connection:The network connecting function (Ethernet) on our products assumes the use in the local network such as the factory LAN network. Do not connect to the external network such as Internet.In addition, please take security measure such as for the virus from the network connection by installing the antivirus software .Security support for the USB memory:Make sure the USB memory is not infected with virus when connecting to the Controller. ☞NOTE ☞ NOTE ☞ NOTE ☞NOTEviii Safety and Installation (RC90 / EPSON RC+ 7.0) Rev.13 Control System ConfigurationThis manual explains with the following combinations of Controllers and software.Robot Controller RC90 with the following label attached .Label ControllerSoftwareRC90 EPSON RC+ 7.0Manual PDF for this robot system is available from EPSON RC+ 7.0 Ver. 7.0.2This option is not available for Robot Controller RC90 (EPSON RC+ 5.0) without the label.☞ NOTE☞ NOTELS3-401* RC90 controller firmware Ver.7.0.2.0 or laterEPSON RC+ 7.0 Before Ver.7.0.1Ver.7.0.2 or later OKOK: Compatible All functions of the EPSON RC+ 7.0 and the Controller are available.: Compatible Connection is OK. We recommend using EPSON RC+7.0 Ver.7.0.2 or later.Manipulator serial No. : L6**00**** LS6-602* RC90 controller firmware Ver.7.0.2.0 or laterEPSON RC+ 7.0 Before Ver.7.0.1Ver.7.0.2 or later OKOK: Compatible All functions of the EPSON RC+ 7.0 and the Controller are available.: Compatible Connection is OK. We recommend using EPSON RC+7.0 Ver.7.0.2 or later.Manipulator serial No. : L6**01**** or later LS6-502*, LS6-602*, LS6-702* RC90 controller firmware Ver.7.1.6.* or laterEPSON RC+ 7.0 Before Ver.7.1.2Ver.7.1.3 or later OKOK: Compatible All functions of the EPSON RC+ 7.0 and the Controller are available.: Compatible Connection is OK. We recommend using EPSON RC+7.0 Ver.7.1.3 or later.LS20-804*, LS20-A04* RC90 controller firmware Ver.7.1.8.* or laterEPSON RC+ 7.0 Before Ver.7.1.3Ver.7.1.4 or later OKOK: Compatible All functions of the EPSON RC+ 7.0 and the Controller are available.: Compatible Connection is OK. We recommend using EPSON RC+7.0 Ver.7.1.4 or later.China RoHSThis sheet and environmental protection use period label are based on the regulationin China. These are not necessary to be concerned in other countries.产品中有害物质的名称及含量机器人型号名称LS3 LS6 LS20系列部件名称有害物质铅汞镉六价铬多溴联苯多溴二苯醚(Pb) (Hg) (Cd) (Cr(VI)) (PBB) (PBDE)机器人× ○○○○○电机(执行器单元、电机单元)× ○○○○○减速机单元× ○○○○○电磁制动器× ○○○○○同步皮带○○○○○○电池单元(电池、电池固定架、电池基板)× ○○○○○密封(密封填料、油封、密封脂、垫片、O型环)× ○○○○○润滑脂○○○○○○电缆(M/C电缆、连接电缆)× ○○○○○散热片○○○○○○LED指示灯○○○○○○电路板× ○○○○○外罩○○○○○○滚珠丝杠花键○○○○○○制动解除开关× ○○○○○伸缩罩○○○○○○扎带○○○○○○气管接头× ○○○○○选件相机安装板× ○○○○○本表格依据SJ/T 11364的规定编制。
爱普生RC90(LS3、LS6)培训

Function Func1 SPEL+中有3种不同的变量。 Integer I • Local : 局部变量(用在同一Function内使用的变量) ... • Module : 模块变量(在同一程序内使用的变量) Fend • Global : 全局变量(在同一项目内使用的变量)
35
五、SPEL+语言
11
RC90普通I/O时序图
4、安全门输入时序图
12
RC90普通I/O扩展板引脚定义
1、I/O扩展板输入输出定义及设置
13
RC90普通I/O扩展板引脚定义
2、1号I/O扩展引脚定义
14
RC90安全I/O定义
不外接急停时可以将安全I/O按如下方式接线:1,2,3,7,9,18,20短接 8,19,21,25短接 接 10,14,15,16短接
2
一、关于机械手的基础知识
1、机械手坐标系 1.1 SCARA机械手坐标系
XY方向坐标(前后左右)
Z方向坐标(上下)
U方向坐标(旋转)
3
一、关于机械手的基础知识
2. 机械手的手臂姿势
在使用机械手作业时,有必要使其用示教时的手臂姿势在指定的点上动作。如果不这样 做,根据手臂姿势的不同,会产生轻微的位臵偏移,或朝着意想不到的路径动作的结果,有 干涉周边设备的危险。为了避免这种情况,在点数据中必须事先指定使其在此点上动作时的 手臂姿势(如下图)。此信息也也可以从程序中变更(\L或者\R)。
39
六、动作指令
3.2 Arc和Arc3 指令
功能:Arc 在XY平面上以圆弧插补动作。 Arc3 在3D空间里以圆弧插补动作。
格式:Arc 经过坐标,目标坐标 说明:将机械手从当前位臵到目标坐标,通过经过坐标用圆弧插补动作活动时使用。从 所给的3点(当前坐标、经过坐标、目标坐标)自动演算圆弧插补轨道,并沿着此轨道 移动机械手直至目标坐标为止。 示例:Arc P2,P3
EPSON 指导教程

2009 -10 爱普生机器人正式在中国成立服务中心和营销总部,该 部门隶属于爱普生(中国)有限公司,全面负责中国大陆地区爱普生工业机器人 产品的市场推广、销售、技术支持和售后服务。 高速度 高稳定性 高精度 视觉系统配合机器人实现互动(---可与任意第三方视觉进行匹配)
4
二、EPSON机器人介绍
• • • • • • •
C4(六轴)
C4— A601 600mm
具体参数: 臂长:175/225 mm 负载:0.5Kg /1Kg(max) 型号 标准循环时间:0.29/0.30 s 重复定位精度:±0.005/±0.008mm( 第1+第2关节) 臂长 ±0.01°(第4关节) 功率:50W(全轴) 本体重:8Kg 负载 适用控制器:RC180、RC620
科先进技术于一体的现代制造业重要的自动化装备 ;广泛适用的能自主动作 ,且多轴联动的机械设备。
• 工业机器人是集机械、电子、控制、计算机、传感器、人工智能等多个学
为什么要使用机器人
替代人工:解决近几年人工成本的增长和招工难的问题 解决难题:“3K”行业—繁重(Kitsui)、肮脏(Kitanai)、危险(Kiken)的工作; 高精度工作;可靠性:稳定性 、机器人可工作24小时
运动范围
电 池 位 置
10
2.2 控制器 • RC700
(1)POWER开关 (2)AC电源 (3)LED (4)冷却风扇过滤器 (5)铭牌标签 (6)MT标签 (7)控制器序列 No.标签 (8)连接目标序列No.标签 (15)触发开关 (9)M/C POWER连接器 (16)LAN(以太网通信)端口 (10)M/C SIGNAL连接器 (17)I/O连接器 (11)EMERGENCY连接器 (18)标准RS-232C端口 (12)TP端口 (19)选配插槽 (13)开发用PC连接专用端口 (20)线夹 (14)存储器端口 (21)电池(安装在控制器内部)
爱普生机器人编程手册

9
EPSON机器人发展历史
开始于对手表的小型零部件的高精度、高效率组装
25年的销售业绩!业界行业最高的市场份额
手表组装生产线
10
EPSON机器人的最大特点
■精密机器人(单轴/4轴/6轴) • 高速度 • 高稳定性 • 高精度 ■视觉系统 • 视觉系统配合机器人实现互动
11
EPSON机器人的产品线
2.1 SCARA机械手的手臂姿势图
22
一、关于机械手的基础知识
2.2 垂直6轴型机械手的手臂姿势 2.2.1 垂直6轴型机械手在其动作范围内的点上,可以不同的手臂姿 势使其动作,如下图示:
23
一、关于机械手的基础知识
2.2.1 在EPSON RC+ 5.0软件中设定垂直6轴型机械手的手臂姿势,如下图示:
重复精度 ±0.005 (J1+J2) mm 工作臂长 循环时间* 最高速度 175~22 5mm
<0.3 second
3000 mm/s
0.37 second
4350 mm/s RC180/ RC620
0.35 second
7900 mm/s RC180/ RC620
0.38 second
11000 mm/s RC180/ RC620
3
为什么使用要机器人
• • • • • • • 替代人工,解决近几年人工成本的增长和招工难的问题 人不愿意做的工作,恶务环境下的工作,比如噪音大的环 境,污染的环境等等。 需要精度较高,人手难以实现的工作,比如中源的帖胶项 目很难用治具人工操作。 集成度高使用方便,减少设备开发周期。 稳定性 机器人可工作24小时 消费者对商品多样化的需求
Function Func1 SPEL+中有3种不同的变量。 Integer I • Local : 局部变量(用在同一Function内使用的变量) ... • Module : 模块变量(在同一程序内使用的变量) Fend • Global : 全局变量(在同一项目内使用的变量)
Ls系列基本手册

■ 清洁机械手时,请勿用酒精或苯等用力擦拭。否则可能会导致涂装面光泽度降低。
注意
LS Rev.4
23
基本篇 3. 环境与设置
3.2 台架
请客户自行制作用于固定机械手的台架。台架的形状与大小因机器人系统的用途 而异。作为台架设计时的参考,下面列出了机械手所要求的条件。
洁净度 :等级 ISO 4 (ISO14644-1)
排气 :排气口尺寸 :内径ø12mm / 外径ø16mm
适用排气管 :聚氨酯管
外径ø12mm(内径ø8mm)或内径ø16mm 建议排气量:1000cm3/s(标准状态)左右
*4:如下所示为测量时的条件。
机械手的动作条件 :额定负载、4关节同时动作、最大速度、最大加速度、占空比50%
通过高速动作以缩短节拍时间 通过重新评估最高速度,缩短长距离移动时的节拍时间(LS3) 通过“适合可搬运重量的最佳加减速度”与“精准定位停止技术”实现的灵巧动 作也缩短了节拍时间
10
LS Rev.4
基本篇 2. 规格
2.2 型号名称
LS3-40 1 S
环境
S :标准 C :洁净
第3关节行程
:150 mm :标准环境规格 1 :120 mm :洁净环境规格(带伸缩罩)
如果在温度与湿度变化较大的环境中使用,机械手内部可能会结露。
直接搬运食品时,需要确认机械手有无导致食品污损的可能性。请与销售商协商。
警告
不能在酸或碱等腐蚀性环境中使用。另外,在盐分等易生锈的环境中使用可能会 导致主体生锈。
■ 请务必在控制器的电源上使用漏电断路器。如果未使用漏电断路器,则可能会因漏 水而导致触电或故障。 漏电断路器的选型因控制器而异。详情请参阅控制器手册。
爱普生4轴机械手维修手册
爱普生4轴机械手维修手册(最新版)目录1.爱普生 4 轴机械手简介2.维修手册的作用和重要性3.机械手的故障排除流程4.常见故障及解决方法5.维护和保养建议6.结论正文一、爱普生 4 轴机械手简介爱普生 4 轴机械手是一款广泛应用于各种工业领域的自动化设备,以其出色的性能和稳定的运行而受到用户的青睐。
它主要由臂、手腕、手抓和控制系统组成,能够在多个轴向上进行灵活的运动,实现精确的定位和抓取。
二、维修手册的作用和重要性维修手册是机械手使用和维护过程中必不可少的参考资料,它包含了机械手的结构原理、操作方法、故障排除等重要信息。
正确地使用和维护手册,可以有效地提高机械手的运行效率和寿命,避免因故障造成的生产损失。
三、机械手的故障排除流程1.故障现象分析:根据机械手的异常表现,初步判断可能的故障原因。
2.故障部位定位:利用维修手册,针对性地进行检查,找出故障的具体部位。
3.故障原因分析:分析故障原因,可能是机械部件的损坏,也可能是操作或设置不当。
4.故障处理:根据故障原因,采取相应的处理措施,如更换损坏部件、调整操作参数等。
5.故障验证:处理完毕后,进行试验验证,确保故障已排除。
四、常见故障及解决方法1.机械手无法正常启动:检查电源线、插座和开关是否正常,如有问题则修复或更换。
2.运动轴无法正常运动:检查轴电机、驱动器和编码器是否正常,如有问题则修复或更换。
3.手抓无法正常抓取:检查手抓内部的吸盘或夹具是否损坏,如有问题则修复或更换。
4.控制系统故障:检查控制系统的硬件和软件是否正常,如有问题则修复或升级。
五、维护和保养建议1.定期检查:按照维修手册的建议,定期对机械手进行全面检查,发现问题及时处理。
2.保持清洁:保持机械手及其工作环境的清洁,防止灰尘和油污影响运行。
3.合理使用:遵循机械手的使用规范,避免超负荷运行,减少不必要的故障。
4.定期保养:按照维修手册的建议,定期对机械手进行保养,如润滑、更换易损件等。
EPSON 安装手册、指南
EPSON JavaPOS ADK手册 安装指南1.13版本 Dec. 2011注意(1) 严禁以任何方式复制本文档的任何部分。
(2) 本文档的内容如有变更,恕不另行通知。
(3) 敬请对本文档中的任何错误予以批评和指正。
(4) 本软件不可使用于其他的指定外设备。
(5) 爱普生公司对因使用本文档中的任何信息而导致的后果不承担任何责任。
商标Microsoft®,Windows®,Windows Server®和Windows Vista®是微软公司在美国及/或其它国家的商标或注册商标。
Linux是Linus Torvalds先生在美国及/或其它国家的商标或注册商标。
Red Hat是红帽公司的注册商标。
SUSE是SuSE Linux AG公司的注册商标,Novell公司的业务之一。
JBuilder是Borland软件公司在美国及其它国家的商标。
EPSON和ESC/POS是精工爱普生公司的注册商标。
Java和JavaPOS是太阳微系统公司在美国及其它国家的商标或注册商标。
此处所使用的其它产品和公司名称仅为区分之用,且可能是其各自公司的商标或注册商标。
爱普生公司在此声明上述商标的所有权利。
Copyright (c) 2005-2011 SEIKO EPSON CORPORATION目录第 1 章 简介 (1)第 2 章 安装 (2)2.1 安装Java (2)2.2 安装Java Advanced Imaging (JAI) (2)2.3 配置您的环境 (3)2.4 启动安装程序 (3)2.5 选择语言 (4)2.6 预安装检查 (4)2.7 简介 (5)2.8 许可协议 (6)2.9 选择一个Java虚拟机 (7)2.10 选择安装类型 (8)2.11 选择要安装的组件 (9)2.12 选择快捷文件夹 (10)2.13 选择用户Classpath (11)2.14 选择通讯方法 (12)2.15 jpos.xml的位置 (13)2.16 升级 (14)2.17 安装前摘要 (16)2.18 完成 (18)第 3 章 卸载 (19)3.1 更改已安装的项目并启动卸载 (19)3.2 确认卸载 (19)3.3 删除电子日志数据文件 (20)第 4 章 无提示安装/卸载 (21)4.1 静态安装的顺序 (21)4.2 设备注册信息的准备 (21)4.3 创建一个安装脚本 (22)4.4 运行安装和卸载 (24)第 5 章 强行卸载 (25)5.1 使用强行卸载选项 (25)iii第 6 章 Windows信息 (26)6.1 配置环境变量 (26)第 7 章 Linux信息 (27)7.1 安装Java (27)7.2 配置环境变量 (27)SuSE (27)Red Hat/CentOS (28)7.3 安装Java Advanced Imaging (JAI) (29)7.4 安装libusb (29)7.5 串行设置 (29)COM3或更高级设置 (29)用户组设置 (30)iv第 1 章简介当安装EPSON JavaPOS ADK程序时,以下的硬件和软件配置是必需的。
爱普生工业机器人EPSON LS系列机械手机械原点校准

5
一、LS系列机械原点调整
1.4 第三轴原点位置(如果已经移动上限位的限位圈或上限位圈被取下时时按 下图所示以第三轴末端与与第一臂底座距离调整第三轴位置。注意:移动第 三轴时可用点动移动,如果不能点动,则将三轴伺服释放然后按住第二轴上 的白色按钮移动Z轴到原点位置)
EPSON LS系列机械原点校准
深圳市长荣科机电设备有限公司
1
内容
一.机械原点位置 二.编码器脉冲复位
三.左右手精确校准
2
一、LS系列机械原点调整
1.1 原点位置
3
一、LS系列机械原点调整
1.2 第一轴原点位置
将键槽与底 座螺丝中心 对齐
1.3 第二轴原点位置
将此键与第 一轴上的小 槽对齐
4
一、LS系列机械原点调整
Hofs Hofs (1), Hofs (2) + (Ppls(P1,2) + Ppls(P2,2)) /2, Hofs(3), Hofs(4)
11
结束
谢谢
12
3.1 准备一个带针尖的夹具装到丝杆上,使针尖与丝杆中心同心,并在工作面 上画一个小十字叉,如下图所示: (对于有高精度矩阵或跟视觉配合做 高精度定位时,如果原点丢失进行校准时必须先按照第二章所叙做初略校准, 然后再进行左右手精确校准)
10
三左右手精确校准
3.2 移动机械手用左手姿势对正工作面上的十字叉,并将该点示教到P1点,然 后切换到右手姿势对正对正工作面上的十字叉,并将该点示教到P2点。然 后在“命令窗口”执行如下指令:
EPSON机器人通讯连接

深圳市长荣科机电设备有 通过USB连接控制器 1.2 通过以太网连接控制器
2
内容
3.11 编写一个RS232串口通讯程序(含串口设置, 数据分解赋值)
3.12 编写一个以太网通讯程序(含以太网设置,数 据分解赋值)
3
超时设为0,表示不 设置超时
设置与上位机保 持一致
10
3、程序操作
3)以太网通讯程序
11
3、程序操作
12
结束
谢谢
13
6
3、程序操作
3.11 编写一个RS232串口通讯程序(参看程序RS232_demo) 1)串口设置 单击“设置”,选择“系统配置”打开控制器设置画面。单击“RS232”,
选择“端口1”进下图所示串口设置画面,串口通讯参数设置与上位机保持一 致,设置好后单击“应用”,然后关闭设置画面
设置串口参数,与 上位机保持一致
7
3、程序操作
8
3、程序操作
3.12 编写一个以太网通讯程序(参看程序internet_demo) 1)控制器IP设置 单击“设置”,选择“系统配置”打开控制器设置画面。单击“配置”,
进入下图所示以太网设置画面,IP地址前3位与上位机保持一致,最后一位与 上位机不同。设置好后单击“应用”,然后关闭设置画面
设置控制器IP地址,IP地址前3位 与上位机保持一致,最后一位与 上位机不同。例如上位机IP为
192.168.1.1 控制器IP设为192.168.1.10
9
3、程序操作
2)以太网端口设置 单击“设置”,选择“系统配置”打开控制器设置画面。单击“TCP/IP”,
选择一个端口号,进入下图所示以太网端口设置画面,IP地址、端口,结束符 设置与上位机保持一致。设置好后单击“应用”,然后关闭设置画面
EPSON-LS系列手册(中文版)

EPSON-LS系列手册(中文版)这个手册旨在提供对EPSON-LS系列的总体描述和目的。
它将提供针对该系列的详细信息,包括产品规格、设置指南和操作步骤等。
无论是新手还是有经验的用户,都可以通过本手册来了解如何正确使用EPSON-LS系列产品,并充分利用其功能和特点。
本手册的目标是以简洁、清晰的语言提供信息,帮助用户快速上手并解决常见问题。
通过本手册,用户将能够全面了解EPSON-LS系列产品,并正确设置和操作其功能。
我们建议用户在使用EPSON-LS系列产品之前仔细阅读本手册,以确保能够获得最佳的使用体验。
请注意,本手册中的所有内容均基于最新可确认的信息。
在引用任何内容之前,请确保其准确性和可靠性。
本手册主要介绍EPSON-LS系列的主要特点和功能。
高精度定位:EPSON-LS系列手册采用先进的定位技术,可以实现高精度的定位和控制,确保产品的准确性和稳定性。
多功能操作:EPSON-LS系列手册提供多种操作模式,包括自动模式、手动模式和远程控制模式,能够适应不同的使用需求。
强大的数据处理能力:EPSON-LS系列手册配备了先进的数据处理功能,可以实时处理大量的数据,提供精确的结果和分析。
灵活的配置选项:EPSON-LS系列手册支持多种配置选项,可以根据用户的需求进行灵活的配置和定制。
易于使用和维护:EPSON-LS系列手册拥有直观友好的用户界面和简单易懂的操作流程,方便用户使用和维护。
以上是EPSON-LS系列手册的主要特点和功能,希望能够帮助用户更好地了解和使用该产品。
本手册将为您提供EPSON-LS系列设备的详细使用指南,包括操作步骤和注意事项。
请按照以下指南使用设备:准备工作:确保设备的电源已连接并正常工作。
将设备与计算机或其他外部设备正确连接。
操作步骤:打开EPSON-LS系列手册中提供的软件或应用程序。
在菜单中选择所需的功能或操作。
根据提示或手册中的说明执行相应的操作步骤。
注意事项:请务必仔细阅读并理解手册中的操作说明,遵循正确的操作步骤。
爱普生机器人软件安装及使用教程

爱普生机器人软件安装及使用教程The document was finally revised on 2021爱普生机器人软件安装及使用教程一、EPSON RC+ 开发软件的安装打开EpsonRC50文件夹,双击开始安装。
出现上面显示的界面后,按按钮。
出现上面显示的界面后,再接着按按钮。
目标驱动器不必选择,直接按按钮。
上面可勾选部分为手册和模拟器实例,可以按默认安装,直接按按钮进行到安装的下一步。
按按钮选择继续安装。
会出现下面的安装进度界面,大约需要等待几分钟,整个EpsonRC50软件安装完成。
安装完成后,将弹出下面的窗口。
按按钮完成软件的安装。
此时,在用户的桌面上会出现下面两个图标前一个图标用于软件的开发和调试,后面的图标用于对工作流程的监视。
二、IP地址的设置用普通网线连接机器人和开发用电脑。
打开本地连接,弹出“本地连接属性”页面。
双击项,将打开Internet 协议(TCP/IP)属性页面,修改IP地址等项为下图的值。
按键。
完成IP的设定。
三、EPSON RC+ 软件使用双击图标,启动EPSON RC+ 软件。
1. 网络通讯的设置在EPSON RC+ 软件菜单中点击“设置”菜单项,单击选择项目。
将弹出下面“电脑与控制器通信”页面。
点击按钮。
选择选项,按键,完成添加网络通讯功能。
点击IP地址单元项,将里面机器人控制器对应的IP改为,单击按钮,完成软件中连接IP的设置。
设置完成后页面显示为下图。
检查网线连接是否正常,正常则单击新添加的Ethernet项,按按钮,弹出下面页面。
选项表示电脑只作为监视器使用,不能进行程序的编制、修改等操作,不能对机器人控制点进行示教,也不能对外部I/O进行控制。
不影响已经存在的网络连接。
选项将首先中断目前和控制器的网络连接,将软件切换到程序模式,在此模式下可以进行控制程序的编制、修改工作,机器人控制点的示教和对外部I/O进行实时控制。
为了进行控制程序的编写、修改和调试,我们需要选择项目并按键切换到程序模式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
EPOSN机器人LS系列安装指导
1.机器人LS3/LS6安装:
本体必须台面安装,请用销钉定位,用为了抑制振动,建议机械手安装面的板使用厚度为20 mm以上的铁板,表面粗糙度为
25 μm以下即可。
用螺丝固定机械手时,必须加弹性垫片与平垫。
注意:机器人运动前请确认机器人本体是否已经紧固.
2.安装RC90控制器:
3.供电电源线连接(AC Power Cable)
供电规格为:单相AC 200 V to AC 240 V;50/60 Hz
4.连接机器人马达电缆(M/C Power Cable)
5.连接编码器电缆(M/C Signal cable)
6.紧急开关及安全门端子排连接
a. 紧急功能接头(25pin)图片:
b.急停25pin信号分布表
c.急停接线图(如果急停线接错有可能导致主板烧坏):
d.常用急停25pin接线图参考:
{根据急停接线图,(安全门短接,采用内部24V与0V(pin22~25))}
7.I/O(输入输出)接线:
a. I/O接头(50pin)图片
b.50pin信号配置(共24个输入,16个输出):
采用I/O远程控制时,为方便调试,必须有的信号为:
输入信号:
Pin2:输入No.0 (Start);用于启动机械手运动
Pin6:输入No.4 (Stop);用于停止机械手运动
Pin7:输入No.5 (Pause) ;用于暂停机械手运动
Pin8:输入No.6 (Continue) ;用于继续机械手运动;
Pin9:输入No.7 (Reset) ;用于复位机械手的急停,机械手的错误报警信号。
输出信号:
Pin10:输出No.0 (Ready) ;用于监控控制器是否上电并启动OK
Pin11:输出No.1 (Running) ;用于监控机械手程序是否运行
Pin12:输出No.2 (Paused) ;用于监控机械手是否暂停
Pin13:输出No.3 (Error) ;用于监控机械手是否发生异常报警
Pin14:输出No.4 (EstopOn) ;用于监控急停是否被按下或急停故障报错
c.输入信号接线:
RC90控制器输入电路使用双向光电耦合器,所以可以采用NPN与PNP两种接线方式,输入电流要求: 10 mA TYP/+ 24 V输入时,因此可进行下述2种配线。
NPN配线(建议优先采用):
即:输入公共端接24V(pin1,pin18,pin34接+24v电源)。
图:NPN输入I/O接线图
PNP 配线:
即:输入公共端接0V(pin1,pin18,pin34接24伏电源的0V)。
图:PNP输入I/O接线图
d.输出信号接线: RC90控制器的输出电路在中国大陆销售的全为NPN 型,如需PNP 要单独申请;因此在配线时,只有一种接线NPN 接线方式。
如果配线时弄错输出类型,则会导致电路板上的部件损坏,机器人系统无法正常进行动作。
最大输出电流: TYP 100mA / 24V 电压输出。
NPN 的输出接线图(输出公共端pin17,pin33接0V):
图:NPN 的输出接线
为保证接线不出问题,我们建议全采用NPN 型接线
即(输入公共端pin1,pin18,
pin34接
+24 V ,输出公共端pin17,pin33接0V )
8.丝杆夹具固定设计参考:
其他详情问题请咨询:/ 夹具采用螺丝抱紧机械
手丝杆机构。
机械手法兰盘
夹具上的定位孔对
齐丝杆的定位孔。