现代控制理论 第2章传递函数矩阵的MFD-文档资料
现代控制理论-02

3. 状态转移矩阵是可逆的,且 Φ −1 (t ) = Φ(−t )
根据 Φ (t + s ) = Φ (t )Φ ( s )
x2 = e A(t2 −t1 ) x1 = Φ(t2 − t1 ) x1
x x(t0) x(t1) x(t2)
x1 = e A(t1−t0 ) x0 = Φ(t1 − t0 ) x0
2. 对任意的t和s,Φ (t + s ) = Φ (t )Φ ( s )
Φ(t )Φ(s) = e At e As 1 2 2 1 A t + L)(I + As + A2 s 2 + L) 2! 2! 1 ⎞ 1 1 1 ⎞ ⎛1 ⎛1 = I + A(t + s) + A2 ⎜ t 2 + ts + s 2 ⎟ + A3 ⎜ t 3 + t 2 s + ts 2 + s 3 ⎟ + L 2! ⎠ 2! 2! 3! ⎠ ⎝ 3! ⎝ 2! 1 2 1 3 2 = I + A(t + s) + A (t + s) + A (t + s) 3 + L 2! 3! = e A(t + s) = Φ(t + s) = ( I + At +
故
e
At
1 −1 1 (T DT ) 2 t 2 + L + (T −1 DT ) n t n + L 2! n! 1 −1 2 2 1 −1 n n −1 −1 = T IT + T DTt + T D Tt + L + T D Tt + L n! 2! 1 1 ⎛ ⎞ = T −1 ⎜ I + Dt + D 2t 2 + L + D nt n + L⎟T n! 2! ⎝ ⎠ =e
现代控制理论

现代控制理论第⼆章线性系统的状态空间描述1.线性系统状态空间表达式连续系统离散系统2.已知系统状态⽅程,画出系统结构图3.已知系统结构图,求系统状态⽅程4.由系统的微分⽅程建⽴状态空间表达式(状态变量转换,转换后矩阵A为友矩阵)已知系统结构图可改写成传递函数表达式,再进⾏变换5.由传递函数建⽴状态空间表达式(N(S)/D(S))①串联分解U(s)=D(s)*Z(s) Y(s)=N(s)*Z(s)②只含单实极点求解特征值,B阵全是1,C阵特征值相应系数③重实极点6.线性系统状态空间表达式的线性变换及其标准型①转换成标准型求特征值及其对应特征向量若A为友矩阵,则P为范德蒙矩阵②转换成约当标准型具有重实特征值,且只有⼀个独⽴实特征向量,⾃定义⼴义实特征向量满⾜P*λ(约当)=A*P ③转换成约当标准型A为友矩阵,P阵的取法不同④转换成约当标准型A具有重实特征值...第三章线性系统的运动分析1.齐次⽅程求解(幂级数、拉⽒变换)2.⾮齐次状态⽅程求解(⽅程多个Bu项)记住额外的积分项3.状态转移矩阵e At 的计算直接幂级数法、拉⽒变换、对⾓化矩阵、待定系数法(系数⽅程组,e At表达式)4.离散系统状态⽅程的解Z变换5.线性定长连续系统动态⽅程的离散化①先求e At ⽤T替代t ,求G(T)H(T)6.离散状态⽅程求解①递推②Z变换记住Z变换的⼏个常⽤的转换第四章线性系统的可控性和可观性1.可控性判别①判别矩阵②对⾓标准型,特征值不同B阵不存在全零⾏③具有重特征值,每⼀个重特征值只对应⼀个独⽴特征向量变换后的约当阵的每个约当⼩块最后⼀⾏所对应的B阵的各⾏元素不全为0.2.离散系统的可控性从⾮零初始状态经过有限步转移到零状态即是可控的或者采⽤判别矩阵判断3.将可控系统的状态⽅程化为可控标准型P逆阵的第⼀⾏取的QC逆的最后⼀⾏P阵的构造4.输出可控存在输⼊u(t)在有限时间内使初始输出转移到指定的任意输出判别矩阵Qyc=[CB CAB CA2B ```CA n-1B D]5.线性定常连续系统的可观测性①判别矩阵②对⾓标准型C阵不含全为0的列③具有重特征值转换成约当阵后约当块⾸列对应的C阵的列的元素不全为06.离散系统的可观测性判别矩阵可观性的物理解释:⽤y(k)在第n步确定每个x(k)7.采样周期对离散化系统可控性和可观测性的影响8.线性系统可控性和可观测性的对偶关系由相应对偶系统的可控性判别矩阵求出可观测标准型9可控性、可观测性与传递函数矩阵的关系G(s)=C(sI-A)B-1+D两种情况:SISO和MIMO10.最⼩实现充要条件:可控可观测如何实现:已知传递函数输⼊维数⼤时(列),选可观测,再⽤判别矩阵检验是否可控输出维数⼤时(⾏),选可控,再⽤判别矩阵检验是否可观测11.SISO可控可观测:不存在零极点对消可控:(sI-A)-1b不存在零极点对消可观测:c(sI-A)-1 不存在零极点对消MIMO可控:(sI-A)-1B的n⾏线性⽆关可观测:C(sI-A)-1 n列线性⽆关12.线性系统的规范分解可控:构造RC可观测:构造RO (初始为逆阵)第五章线性定长系统的状态反馈和状态观测器设计1.状态反馈k为状态反馈矩阵(A-bk)为闭环系统矩阵过程:先写出可控标准型写出状态反馈系统的特征⽅程写出期望闭环极点对应的闭环系统期望特征⽅程对应特征值系数相等注意:系统不可控时(5.2.3)2.超调量相关公式3.状态反馈不影响可控性可能影响可观性,(配置的极点与原来的零点存在对消)4.镇定:闭环系统的极点具有负实部可控必然可镇定,可镇定不⼀定可控(5.3.1)再做⼀遍5.输出反馈(A-HC)配置极点问题同状态反馈H为列阵,k为⾏阵6.状态观测器(A-HC):全维状态观测器系统矩阵H:n*q维,n为受控系统的特征多项式最⾼次幂,q为输出维数闭环系统极点的配置为k值的配置全维状态观测器极点配置为H值配置第六章李雅普诺夫稳定性分析1.外部稳定系统对所有有界输⼊引起的零状态响应的输出是有界的判据:G(s)=C(sI-A)-1B 对应极点都在s的左半平⾯内2.内部稳定系统的特征值为负?内部稳定=外部稳定+可控可观测3.李雅普诺夫概念4.李雅普诺夫稳定性判别间接法:A的所有特征值均具有⾮正实部,且具有零实部的特征值为A的最⼩多项式的单根系统的唯⼀平衡状态Xe=0 是渐进稳定的充要条件:A的所有特征值均具有负实部直接法:存在正定矩阵V(x),其导数为负定的。
现代控制理论-2PPT课件

20世纪60年代以后发展起来,以 状态空间法为基础,研究多输入多输出、非线性、时变等复杂系 统的分析和设计问题。
现代控制理论的研究对象与特点
研究对象
现代控制理论以系统为研究对象,包括线性系统、非线性系统、离散系统、连 续系统等。
特点
现代控制理论注重系统的内部结构、状态和行为,强调对系统的整体性能和优 化指标的研究,采用状态空间法、最优控制、鲁棒控制等先进的分析和设计方 法。
现代控制理论-2ppt课件
contents
目录
• 引言 • 线性系统的状态空间描述 • 线性系统的能控性和能观性 • 线性定常系统的稳定性分析 • 线性定常系统的综合与校正 • 非线性系统分析基础
01 引言
控制理论的发展历程
经典控制理论
起源于20世纪初,主要研究单输 入-单输出线性定常系统的分析和 设计问题,采用传递函数、频率 响应等分析方法。
串联校正
在系统中串联一个校正装置,改 变系统的开环传递函数,从而实
现对系统性能的综合与校正。
并联校正
在系统中并联一个校正装置,产生 一个附加的控制作用,以改善系统 的性能。
复合校正
同时采用串联和并联校正方式,以 更灵活地改善系统的性能。
06 非线性系统分析基础
非线性系统的特点与分类
非线性特性
系统输出与输入之间呈现非线性 关系,不满足叠加原理。
本课程的目的和要求
目的
本课程旨在使学生掌握现代控制理论的基本概念和方法,培养学生分析和设计控 制系统的能力,为从事控制工程和相关领域的科学研究和技术开发打下基础。
要求
学生应掌握状态空间法的基本原理和数学工具,了解最优控制和鲁棒控制的基本 思想和方法,能够运用所学知识分析和设计简单的控制系统,并具备一定的实验 技能和创新能力。
现代控制理论(第二章)
幂项的系数应相等, 有:
在式(4)中,
令
,可得:
(6)
将以上结果代入 式(4),故得:
再用
代替
即在代替 的情
况下,同样可以
证明式2)
的正确性。
(7)
等式右边括号内的展开式是 矩阵,它 是一个矩阵指数函数,记为 ,即 于是式(6)可表示为:
也是
非奇异方阵,并满足如下的矩阵微分方程和初始条件:
证明 将解式(12)代入式(11),有
(13) (14)
即
又在解式(12)中令
,有:
即
这就证明了,满足式(13)、式(14)的 齐次微分方程(11)的解。
,按式(12)所求得的 是
2.4.3 状态转移矩阵
基本性质
与线性定常系统的转移矩阵类似,同样有:
都可用
线性表示。
(2)在 即
定义中,用上面的方法可以消去 A 的 n及 n以上的幂次项,
(11)
(3)
的计算公式
A的特征值互异时, 则
证明 根据A满足 其自身特征方程的定 理,可知特征值 和 A是
可以互换的,因此, 也必须满足式(11), 从而有: (12)
上式对 求解,即得式(12)。
A 的特征值均相同,为 则
其中 T 是使 A 变换为对角线矩阵的变换阵。由式(7),有:
3.利用拉氏反变换法求 (10)
证明 齐次微分方程
两边取拉氏变换
即 故
对上式两边取拉氏反变换,从而得到齐次微分方程的解:
4.应用凯莱—哈密顿定理求 (1)由凯莱—哈密顿定理,方阵A满足其自身的特征方程,即
第2章 现代控制理论1PPT课件
时不变系统状态转移矩阵Φ tt0或 Φ t是满足如下矩阵微分
方程和初始条件的解,这也是检验一个矩阵是不是状态转移
的条件。
Φ (tt0)AΦ (tt0)或 Φ (t)AΦ (t)
Φቤተ መጻሕፍቲ ባይዱ(0)I
Φ (0)I
(2.5)
1Φ t在 t0的值 lim ΦtI
t0
(2)Φt对t的导 Φ 数 tA Φ tΦ tA
故可求出其解为:
t
X ( t) ( t) X ( 0 ) o ( t ) B () U d ( 2 .2 b )
式中 (t) eAt 为系统的状态转移矩阵。
对于线性时变系统非齐次状态方程,
X ( t) A ( t) X ( t) B ( t) U ( t) ( 2 3 )
类似可求出其解为
x (0 )e a t tb(u )e a (t )d 0
同样,将方程(2.1)写为 X (t)A(X t)B(U t)
在上式两边左乘eAt ,可得:
e A [X t(t) A(t) X ]d[e AX t(t) ]e A B t (tU )
dt
3
将上式由 0 积分到 t ,得
X ( t) e A X t ( 0 ) te A (t )B () U d (2 .2 a ) o
的解,X(t)=Ф (t, t0)X(0) 。 下面不加证明地给出线性时变系统状态转移矩阵的几个
重要性质: 1、 (t,t)I
2 、 ( t 2 ,t 1 ) ( t 1 ,t 0 ) ( t 2 ,t 0 )
3 、 1 (t,t0) (t0 ,t) 4、当A给定后,(t,t0) 唯一
5、计算时变系统状态转移矩阵的公式
令 x (t) b 0 b 1 t b 2 t2 b iti b iti,t 0
第二章 现代控制理论基础
微分方程组可以改写为
di (t ) R uC (t ) u (t ) = i (t ) + dt L L L
duC (t ) 1 = i (t ) dt C
并且写成矩阵形式: 并且写成矩阵形式:
di (t ) R dt L du (t ) = 1 C dt C 1 i (t ) 1 L + L u (t ) 0 uC (t ) 0
0 0 an 1 an 2
则式(2.4)可以写成
x = Ax + Bu
输出方程可写成
y = x1
写成矩阵方程形式为
x1 x y = [1 0 0] 2 = Cx xn
例2.1 设某控制系统的动态特性可用下述微分方程描述
y + 5 + 6 y + 12 y = u y
系统闭环传递函数为
Y ( s) 1 1 = = 3 U ( s ) s( s + 2)( s + 3) + 1 s + 5s 2 + 6s + 1
通过拉普拉斯逆变换,可求得系统运动微分方程为
(2.4)
记
x1 0 x 0 2 x = , A = xn 1 0 xn an 1 0 0 1 0 x1 0 x 0 0 2 , x = , B = 1 xn 1 0 xn 1 a1
输出方程为: 输出方程为:
x1 y = [1 0] x2
[例2] 机械平移系统. 如图为一加速度仪的原理结构图。它可以指示出其 例 壳体相对于惯性空间(如地球)的加速度。
设: xi 为壳体相对于惯性空间的位移; x0 为质量m相对于惯性空间的位移; y= xi - x0 为质量m相对于壳体的位移. 根据牛顿第二定律,系统的运动方程为: xi x0
现代控制理论第2章
图2-14 典型一阶系统的结构图
其闭环传递函数为 (2-3-1) 其中, 称为系统的时间常数, 为系统的极点值。 凡是具有(2-3-1) 式形式传递函数的系统为一阶惯性系统, 它在S 平面上的极点分布为 。如图2-15 所示
图2-15 一阶惯性系统的极点分布
一阶系统的单位阶跃响应可由下式求出
一阶惯性环节的单位阶跃响应曲线如图2-16 所示:
系统输出为
(3)输入信号与干扰信号同时作用下的系统输出 系统结构如图2-1 所示。 系统在U(s) 和N(s) 同时作用下的总输出为
2. 闭环系统的误差传递函数 偏差: ,拉氏变换为 (1)输入信号U(s) 作用下的系统误差传递函数 此时N(s) = 0,结构如图2-4 所示:
。
图2-4 输入信号作用下的系统
方框中的代数式代表矩阵,每一方框代表的输入输出 关系规定为:Y (s) 为输出,U(s) 为输入,G(s) 为方块所示 传递函数,则
Y (s) = G(s)U(s). 系统方块图的绘制步骤如下: (1)分析系统的组成,并写出各个环节的运动方程, 要特别注意反馈的情形; (2)由运动方程,写出系统的传递函数; (3)由传递函数画出各个环节的方块图; (4)根据信号流向,用信号线及相加点将各个环节 连接起来。
2. 临界阻尼( = 1 ) 当 = 1 时,特征方程有两个相同的负实根,即 ,此时的 如图2-19(b)所示。 3. 过阻尼( > 1 ) 当 > 1 时,两个特征根为 是两个不同的负实根,如图2-19 (c)所示。 4. 无阻尼( = 0 ) 当 = 0 时,特征方程有一对共轭纯虚根: 如图2-19(d)所示,这是欠阻尼的特殊情况。
图2-16 一阶惯性环节的单位阶跃响应曲线
现代控制理论第二章
1 s 1 1 s
Y(s)
2.5 由系统方块图导出状态空间描述
方块图导出状态空间模型的步骤 (1)将系统方块图中的每一环节都分解为积分环节和 惯性环节的组合。 (2)以所有惯性环节和积分环节的输出作为状态变量 的拉氏变换。 (3)列出所有惯性环节和积分环节输入输出的拉氏变 换关系式。 (4)对所有(3)中的拉氏变换关系式求拉氏反变换 得到一阶微分方程组。 (5)把(4)中的一阶微分方程组化成向量矩阵表示 的状态方程与输出方程。
例2.7
2.5 由系统方块图导出状态空间描述
(一)方块图方法的思路 当系统的描述以方块图形式给出时,常常无须求 出系统的总传递函数和状态变量图,可以直接由方块 图导出其相应的状态空间模型. 方法:把系统中二阶以上的环节化为由惯性环节 和积分环节组成。
2.5 由系统方块图导出状态空间描述
(二)典型二阶系统状态空间描述
2.6
习题课
2.7 系统状态空间描述与传递函数
设线性连续定常系统的状态空间模型为
x Ax Bu y C x Du
对以上两式分别做拉氏变换,得
sX s AX s BU s
Y s CX s DU s
从以上两式中消去 X s , 则
s a1 s
n 1
k1 s s1
k2 s s2
kn s sn
k i lim W s s s i
例2.5
s si
2.3 系统的频域描述化为状态空间描述
(二)控制系统传递函数的极点为重根 (1) 传递函数的极点为一个重根
W s Y s U s k 11 k 12 k 1n s s1
现代控制理论基础第二章习题答案

现代控制理论基础第二章习题答案第二章状态空间表达式的解3-2-1 试求下列矩阵A 对应的状态转移矩阵φ(t )。
(1)-=2010A (2) ??-=0410A (3) --=2110A (4)-=452100010A (5)??=0000100001000010A (6)?=λλλλ000100010000A 【解】:(1)(2)(3)(4)特征值为:2,1321===λλλ。
由习题3-1-7(3)得将A 阵化成约当标准型的变换阵P 为=421211101P ,----=-1211321201P线性变换后的系统矩阵为:(5)为结构四重根的约旦标准型。
(6)虽然特征值相同,但对应着两个约当块。
或}0100010000{])[()(1111----??------=-=Φλλλλs s s s L A sI L t 3-2-2 已知系统的状态方程和初始条件(1)用laplace 法求状态转移矩阵;(2)用化标准型法求状态转移矩阵;(3)用化有限项法求状态转移矩阵;(4)求齐次状态方程的解。
【解】:(1)(2)特征方程为:特征值为:2,1321===λλλ。
由于112==n n ,所以1λ对应的广义特征向量的阶数为1。
求满足0)(11=-P A I λ的解1P ,得:0110000000312111=--P P P ,=0011P 再根据0)(22=-P A I λ,且保证1P 、2P 线性无关,解得:对于当23=λ的特征向量,由0)(33=-P A I λ容易求得:所以变换阵为:[]-==110010001321P P P P ,=-1100100011P 线性变换后的系统矩阵为:(3)特征值为:2,1321===λλλ。
即(4)3-2-3 试判断下列矩阵是否满足状态转移矩阵的条件,如果满足,试求对应的矩阵A 。
(1)-=Φt t t t t sin cos 0cos sin 0001)((2)-=Φ--tt e e t 220)1(5.01)( (3)+--+--=Φ--------t t ttt t tt e e e e e e e e t 22222222)((4)?++-+-+=Φ----t t tt t t t t e e e e e e e e t 33335.05.025.025.05.05.0)( 【解】:(1)∴不满足状态转移矩阵的条件。
现代控制理论+2-3+系统的传递函数矩阵 (1)

解:
(sΙ − A )
−1
-1
G (s ) = C(sI − A ) B + D
1 1 0 s = 0 1 0
s s −1 = = 0 s + 2 0
s (s + 2 ) 1 s+2
1 1 s (s + 2 ) 1 0 = s 1 0 1 0 s+2
求传递函数矩阵 的表达式
A = [0 1; 0 -2]; B = [1 0; 0 1]; C= [1 0; 0 1]; D = 0; sys = ss(A,B,C,D) tf (sys)
返回
Transfer function from input 1 to output... 1 #1: s #2: 0 Transfer function from input 2 to output... 1 #1: --------s^2 + 2 s 1 ----s+2
1 0 1 x1 1 0 u1 x = + , x 2 0 − 2 x2 0 1 u2
1 s G (s ) = 0 1 s (s + 2 ) 1 s+2
y1 1 0 x1 y = 0 1 x 2 2
前页
一、定义及表达式
零初始条件下,输出向量的拉氏变换式与输入向量 的拉氏变换式之间的传递关系——传递函数矩阵。
(t ) = Ax(t ) + Bu(t ) ⇒ sX(s ) = AX(s ) + BU(s ) x y (t ) = Cx(t ) + Du(t ) ⇒ Y(s ) = CX(s ) + DU(s )
现代控制理论-2-控制系统状态空间描述-第2、3讲[1]
![现代控制理论-2-控制系统状态空间描述-第2、3讲[1]](https://img.taocdn.com/s3/m/3de4f844ff00bed5b9f31d98.png)
Page: 8
求系统的传递函数 G (s) 是输出。
Y(s) U(s)
,其中 U( s)是输入,Y( s)
解:根据求传递函数的公式 G (s)Y(s)C(sIA)1BD U(s)
s 00 0 1 0 s sIA 0s 0 0 0 1 0
00s 123 1
1 0 s 1 2 s3
d3y9d2y18 dy2y 72u 0 dt3 dt2 dt
Page: 14
(1) 选择状态变量
x1 y dy
x2 dt
(2) 对(1)中各式两边求导x ,3 并 代dd 2t入2y 微分方程,有
x1
dy dt
x2
d2y x2 dt2 x3
x3
27
y
18
dy dt
9
d2y dt2
20u
输出方程为 y x1 2 7 x1 1 8 x 2 9 x 3 2 0 u
为 (sI-A) 的 伴随矩阵
为 (sI-A) 的 行列式
系统状态空间表达式的特征方程: sIA 0
系统状态空间表达式的特征根或特征值: sIA 0 的根
Page: 4
y s C s A I 1 B D u s G s u s
其展开式为
mr
矩阵函数
y1s y2s
g11s g1rs
U2 (s)
G12 (s) G22 (s)
Y2 (s)
Page: 6
Y1(s)G 11(s)U1(s)G 12(s)U2(s) Y2(s)G21(s)U1(s)G22(s)U2(s)
用矩阵方程表示:
Y Y1 2((ss))G G1 21 1((ss))
G12(s)U1(s) G22(s)U2(s)
现代控制理论课后题答案(第二章-第六章)
1
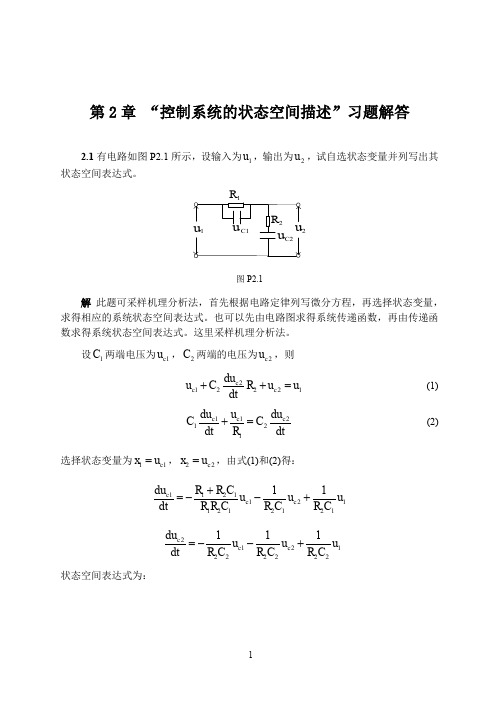
R R2C1 1 1 1 1 x1 x2 u1 x R1 R2C1 R2C1 R2C1 1 1 1 2 x1 x2 u1 x R2C2 R2C2 R2C2 y u2 u1 x1
即:
R1 R2C1 1 R1 R2C1 x x 2 1 R2C2
x2
u
R1
R3
y
R2
图 P2.8 RL 电网络
解 采用机理分析法求状态空间表达式。由电路原理可得到如下微分方程
2 x1 x2 R3 R2 x2 L2 x
1 x1 x2 R3 u x1 L1 x / R1
y x1 x2 R3
(2) 解 采用拉氏变换法求取状态空间表达式。对微分方程 (2)在零初试条件 下取拉氏变换得:
2s 3Y ( s ) 3sY ( s ) s 2U ( s ) U ( s ) 1 2 1 s Y (s) s 1 2 2 U ( s ) 2s 3 3s s 3 3 s 2
dy1 dy , x4 2 。 dt dt
3 Kx1 B1 M1 x
2
d ( x2 x1 ) dt
对 M 2 有:
4 f (t ) B M2x
经整理得:
1
d ( x2 x 1) dx B 2 dt dt
2
状态方程为:
1 x3 x x 2 x4 B B K 3 x1 1 x3 1 x4 x M1 M1 M1 B B B 1 4 1 x3 ( 1 2 ) x4 u x M2 M2 M2 M2
1 1 R2C1 x1 R2C1 u1 x2 1 1 R C R2C2 2 2
现代控制理论 第1-2章
x (t ), x2 t0 ,, xn (t0 ) 只要给定初始时刻 状态变量的最小性 t0 的任意初始状态变量 1 0
和t≥t0 各时刻的任意输入变量组 u1 (t ), u 2 t ,, u p (t ) 那么系统的 任何一个内部变量在t≥t0各时刻的运动行为也就随之而完全确定
y ( n ) a n 1 y ( n 1) a 0 y b0 u
写成矩阵形式: x 0 1 1 选取n个状态变量 x1 y x 0 0 2 x2 y
xn 1 xn
例3
LD
diD RDiD Ke uD dt
iD
i f const
K diD R 1 D iD e uD dt LD LD LD
LD RD
M
uD
K miD f D J D
d dt
J D fD
f d K m iD D dt JD JD
RD D LD i K m J D Ke 1 LD iD LD u D f D 0 JD
0 F 0 V f m
m
x
x x
f
k
V
0 x1 x k 2 m
x 1 y x 0 k x m
0 0 x 1 1 0 x f 2 1 m m
2
1 p 3
p 0] 2
1 0 u u p 3 1
《现代控制理论》课后习题答案(完整版)
1-5
列写其相应的状态空间表达式,并画出相应的模拟结构图。解:令 ,则有
相应的模拟结构图如下:
1-6
解:
1-7
‘
(1)画出其模拟结构图
(2) 求系统的传递函数解:
(2)
1-8
(3)(3)
解:A的特征方程
解得: 令得
(或令 ,得)
当 时,
解得: 令 得
1-9
(2)
解:A的特征方程
第一章习题答案
1-1
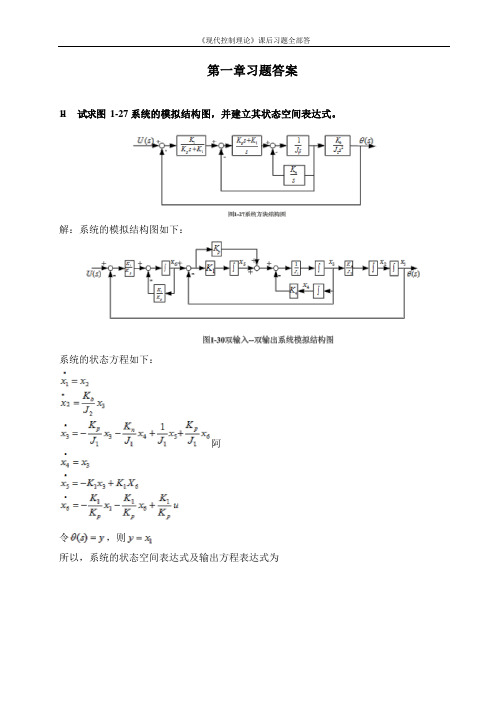
解:系统的模拟结构图如下:
系统的状态方程如下:
阿
令 ,则
所以,系统的状态空间表达式及输出方程表达式为
1-2
解:由图,令 ,输出量
有电路原理可知:既得
写成矢量矩阵形式为:
1-3
1-4 两输入 , ,两输出 , 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
1串联联结2并联联结1113版教材已知如图122所示的系统其中子系统的传递函数阵分别为求系统的闭环传递函数现代控制理论课后习题全部答111第版教材已知如图122所示的系统其中子系统的传递函数阵分别为求系统的闭环传递函数现代控制理论课后习题全部答112已知差分方程为试将其用离散状态空间表达式表示并使驱动函数u的系数b即控制列阵为所以现代控制理论课后习题全部答所以状态空间表达式为现代控制理论课后习题全部答第二章习题答案现代控制理论课后习题全部答现代控制理论课后习题全部答现代控制理论课后习题全部答24用三种方法计算以下矩阵指数函数第二种方法即拉氏反变换法
(1)
解法1:
解法2:
求T,使得得所以
当时,
当 时,
解之得令得
约旦标准型
现代控制理论 第2章传递函数矩阵的MFD 共35页
不唯一。 N (s ) N (s )W (s ),D (s ) D (s )W (s )
若定义
则
G (s) N (s)D 1 (s) N (s)D 1 (s)
d egd etD (s)d egd etD (s)
且
当W(s)为单模阵时(其行列式为一常数)
d egd etD (s)d egd etD (s)
则称R(s)是N(s)和D(s)的gcrd.
• gcld:
(1)Q(s)是B(s)和A(s)的一个左公因子;
(2)Q (s)是B(s)和A(s)的任一个其它左公因子R1(s)的右 倍式,即Q(s)=Q1(s)V(s)
则20称19/7/Q20 (s)是B(s)和A(s)的gcld.
5
Gcd 的性质
以gcrd为例
• M(s)为对角阵时,列既约等价于行既约。
2019/7/20
15
7 Smith形
Q ( s ) q p , rankQ ( s ) r ,0 r min( q , p ) U ( s)Q (s)V (s) (s)
1 ( s )
2 (s)
r (s)
2019/7/20 deM t (s)(deM t hc)skci 次数低于kc的 i 各项 13
多项式矩阵的行次表示式
s2 010 s 12 s 13 s
M (s)
s3 020 s 1 0
0 一般地M(s) Nhomakorabea Hr(s)Mhr Mlr(s) Hr(s) diag{skr1,skr2 ,,skrq} 当M(s)为方阵时 ,有
第2章 传递函数矩阵的矩阵分式描述
现代控制理论课件传递函数矩阵的实现完整版

ΣAi ,Bi ,Ci ,则Gs的实现为:
清华大学 现代控制理论 课件 (自动化系 石宗英)
31/54
11.3 传递函数矩阵的实现
A1 0
0
B1 0
0
A
0
A2
0
,
B
0
B2
0
0
0
Al
0
0
Bl
C C1 C2
Cl
该实现的维数为
l
n ri r l
i 1
例:p.291 例9.10.3
0
0
1
i
,
Bi
0 1
cimi 2 ci1
清华大学 现代控制理论 课件 (自动化系 石宗英)
21/54
11.2 标量传递函数的实现
则Gs的实现ΣA,B,C 为:
A1 0 0
B1
A
0
A2
0
,
B
B2
0 0 Ar
Br
C C1 C2 Cr
清华大学 现代控制理论 课件 (自动化系 石宗英)
A4
0
0
B3 B4
C
C1 0
0 C2
C3 0
0 C4
清华大学 现代控制理论 课件 (自动化系 石宗英)
26/54
11.3 传递函数矩阵的实现
对所求得的实现ΣA,B,C 进行可控性可观性 结构分解,可得到Gs的最小实现,即ΣA,B,C 的可控且可观部分ΣAco ,Bco ,Cco 。
清华大学 现代控制理论 课件 (自动化系 石宗英)
A~B~
A~ n1B~
清华大学 现代控制理论 课件 (自动化系 石宗英)
9/54
现代控制理论第2章2
∫ A(τ )dτ 满足矩阵乘法可交换条件。 1 ⎡ ⎤ ⎡ ⎢ 0 (τ + 1) ⎥ d τ = ⎢ 0 ∫ (τ = ( ) A τ d τ ∫ ∫ ⎢ ⎥ ⎢
A(t)与
t
t
t0
t
t
2
t0
t0
t0
⎣0
⎡ 0 ⎢ = ⎢ ⎣0
注意:
t
⎣0 1 1 ⎤ − + ( t + 1) ( t 0 + 1) ⎥ = ⎥ 0 ⎦ ⎦
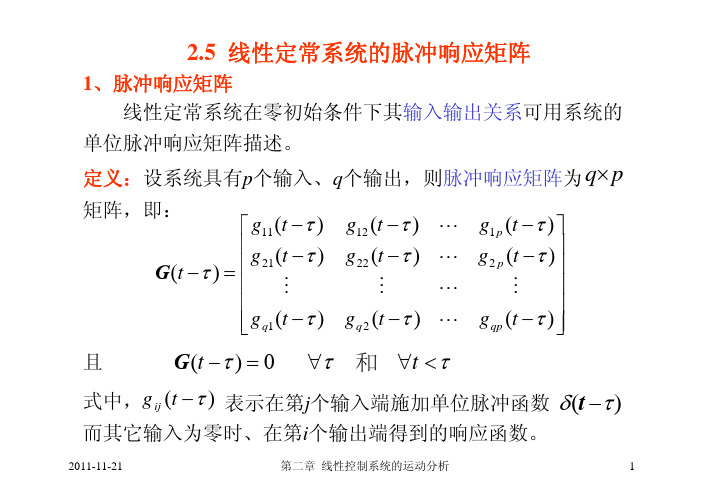
2.5 线性定常系统的脉冲响应矩阵
1、脉冲响应矩阵 线性定常系统在零初始条件下其输入输出关系可用系统的 单位脉冲响应矩阵描述。 定义:设系统具有p个输入、q个输出,则脉冲响应矩阵为 q× p 矩阵,即:
⎡ g11 (t − τ ) g12 (t − τ ) ⎢ g (t − τ ) g (t − τ ) 21 22 G (t − τ ) = ⎢ ⎢ M M ⎢ ⎢ ⎣ g q1 (t − τ ) g q 2 (t − τ )
[
]
[
]
对上式求导数,得:
d ∫tt0 A (τ )d τ 1 t t A ( t ) ∫t 0 A (τ )d τ + ∫t 0 A (τ )d τ A ( t ) + L [e ] = A (τ ) + dt 2! 1 t t k −1 + A ( t )[ ∫t 0 A (τ )d τ ] + L + [ ∫t 0 A (τ )d τ ] k −1 A ( t ) + L k!
& (t ) x = a (t ) x (t )
dx(τ ) t dτ = ∫t0 a(τ )dτ ∫ x(τ )
现代控制理论-第二章+状态空间描述2讲-561
为 (sI-A) 的 伴随矩阵
为 (sI-A) 的 行列式
系统状态空间表达式的特征方程: sI A 0
系统状态空间表达式的特征根或特征值: sI A 0 的根
Page: 3
ys CsI A 1 B D us Gsus
其展开式为
mr
传递函数矩阵
y1s
y2
s
g11s
g
21 s
一系统动态行为的描述。
Page: 29
2.6 系统状态方程的线性变换
状态向量
x x1, x2 , , xn T
非奇异变 换矩阵
x Ax bu y cx
xPx
x Ax b u
y
cx
新状态
向量
A P1AP b P1b c cP
x P1APx P1Bu
若含有D阵的话, 易知有:
0
0 b
0
1
C 0 , 1 n1
注意:A阵仍为友矩阵;
若状态方程中的A,b具有这种形式,则称为能控
标准型。
Page: 21
2)当
G(s)
bn
N(s) D(s)
即bn 0时
有A,b不变,只是
y Cx b u n
系统{A,b,C,D}称为G(s)的能控标准形 实现。
Page: 22
u
n1
Ts 1
s2 2 s 2
1 b1 a1b2
而b2 0, b1 T , b0 1
a11 2T
0 1 a0 2
Page: 24
y 2 y 2 y Tu u
GS
ys us
s2
Ts 1
2 s
2
x Ax bu y Cx
637-现代控制理论Modern Control Theory II共18页文档

李亚普诺夫方程求解
李亚普诺夫方程
验证:
是否
4.5.李亚普诺夫方法在非线性系统中的应用
克拉索夫斯基方法
且
例题
谢谢你的阅读
❖ 知识就是财富 ❖ 丰富你的人生
4.2.李亚普诺夫第一法
1.线性系统的稳定性判据
状态稳定性
输出稳定性
例 注意:
2.非线性系统的稳定性判据
2.非线性系统的稳定性判据 例
不稳定!
临界状态! 用李亚普诺夫第二方法判别!
4.3.李亚普诺夫第二法
直接法
能量观点
李亚普诺夫函数
要 素
充分条件,非充要条件!来自4.4.李亚普诺夫方法在线性系统中的应用
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.1 数学基础 2.2 矩阵分式描述 2.3 有理分式阵的互质分解 2.4 史密斯-麦克米伦形
2.1 数学基础
1 单模矩阵 方多项式矩阵Q(s),若detQ(s)是独立于s 的一个非零常数,则称其为单模矩阵。 性质: (1)Q(s)为单模阵Q(s)的逆也是多项式矩阵; (2)Q(s)为单模阵Q(s)非奇异; (3)单模矩阵的逆阵也是单模矩阵; (4)单模矩阵的乘积也是单模矩阵。
• gcld:
(1)Q(s)是B(s)和A(s)的一个左公因子; (2)Q (s)是B(s)和A(s)的任一个其它左公因子R1(s)的右 倍式,即Q(s)=Q1(s)V(s) 则称 Q(s)是B(s)和A(s)的gcld. 2019/2/20 5
Gcd 的性质
以gcrd为例
(1)gcrd不唯一. 若R(s)是D(s)和N(s)的gcrd,W(s)是单模矩阵, 则W(s)R(s)也是D(s)和N(s)的gcrd. Why:
2019/2/20 3
3 公因子和最大公因子
公因子的定义
• 相同列数的两个多项式矩阵间可以定义右公因子(是多项式 矩阵).假定N(s)和D(s)列数相同,若 N(s) N (s)R(s)
D(s) D(s)R(s)
则R(s)称为N(s)和D(s)的右公因子. • 相同行数的两个多项式矩阵间可以定义左公因子(是多项式 矩阵).假定B(s)和A(s)行数相同,若
N ( s 示为R(s)=X(s)D(s)+Y(s)N(s) (5)gcrd的多项式元的次数可以高于D(s),N(s)元多项 式的次数.
7
4 互质性
右互质和左互质 D(s)和N(s)列数相同,可以定义gcrd. 若gcrd为单模阵,则称D(s)和N(s)右互质. A(s)和B(s)行数相同,可以定义gcld. 若gcld为单模阵,则称A(s)和B(s)左互质.
1 1 (2 ) U ( s ) 非奇异 , 且 N ( s ) D ( s ) U (s) U (s) 22 22 21
(3 )D (s),N (s) 为右互质 ,当且仅当 deg det D (s) deg det U (s) 22
2019/2/20
10
5 列次数和行次数
•
多项式的次数:
D(s), N (s)非右互质 存在B(s) q p , A(s) qq , 使 B(s) D(s) A(s) N (s) B(s) 且 deg det A(s) deg det D(s) 类似两个多项式的互质 性 N ( s ) B( s ) 若N (s), D(s)为多项式 ,若 ,即 B(s) D(s) A(s) N (s) 0, D(s) A(s) 而 deg det A(s) deg det D(s),则N (s), D(s)必有公因子 , B( s ) 是约去公因子后的结果 . 2019/2/20 A(s)
2019/2/20 6
(2)D(s),N(s)的所有gcrd在非奇异性和单模性上相 同,即 若R1(s)是D(s),N(s)的一个gcrd R2(s)也是D(s),N(s)的一个gcrd 则R1(s)非奇异R2(s)非奇异 R1(s)单模R2(s)单模 D ( s ) (3) 列满秩时 ,其所有 gcrd 都是非奇异的 .
2019/2/20 2
2 初等变换:
(1)行(列)交换; (2)用一非零实或复数乘以某行或列; (3)用某行(列)乘以一个多项式加到另一行(列)上。 注意: (1)初等行(列)变换初变换的矩阵Q(s)左乘(右乘)初 等矩阵; (2)初等矩阵都是单模矩阵; (3)对Q(s)进行一系列初等变换,相当于Q(s)左乘和(或) 右乘单模矩阵; (4)单模矩阵可以分解成同维的初等矩阵的乘积,反之,初 等矩阵的乘积为同维的单模矩阵。
9
D(s) A(s) 0, N ( s)
Gcrd构造关系式的一个性质
U (s) U (s)D (s) (s) R (s) D 11 12 U (s) U ( s ) U ( s ) N ( s ) N ( s ) 0 21 22 设 D (s)非奇异 ,则成立 ( 1 ) U (s), U (s)左互质 ; 22 21
m m 1 d (s )d s d s d sd 0 m m 1 1 0,d m
则 s 的最高幂次为 m ,称为多项式的次数 .
• 多项式向量的次数:所有元多项式中,s的最高幂次。
右互质判据 • 判据1:贝佐特等式判据 D(s),N(s)右互质存在X(s),Y(s)多项式矩阵 使X(s)D(s)+Y(s)N(s)=I
2019/2/20 8
• 判据2:秩判据
D ( s ) D ( s ), N ( s ) 右互质 rank p , s C N ( s ) • 判据3:非右互质判据
B(s) Q(s)B(s) A(s) Q(s) A(s)
则 Q(s)称为B(s)和A(s)的左公因子. 2019/2/20
4
gcd(最大公因子)的定义 • gcrd:
(1)R(s)是N(s)和D(s)的一个右公因子; (2)R (s)是N(s)和D(s)的任一个其它右公因子R1(s)的左 倍式,即R(s)=W(s)R1(s) 则称R(s)是N(s)和D(s)的gcrd.
W ( s ) 0 ~ 构造 U ( s ) ,也是单模阵 0 I D ( s ) W ( s ) 0 R ( s ) W ( s ) R ( s ) ~ U ( s ) U ( s ) 0 N ( s ) 0 I 0