外骨骼助力机器人结构设计及动力学仿真
下肢外骨骼康复机器人动力学仿真与

2022年第46卷第12期Journal of Mechanical Transmission下肢外骨骼康复机器人动力学仿真与分析马晓君1刘玉阳1贾秋生2刘德胜3刘训报1袁铭润3(1佳木斯大学机械工程学院,黑龙江佳木斯154007)(2哈尔滨轴承集团公司,黑龙江哈尔滨150002)(3佳木斯大学信息电子技术学院,黑龙江佳木斯154007)摘要下肢外骨骼康复机器人可以有效提高下肢运动功能受损患者的康复效率,减轻康复医师的工作量。
设计了一款气动肌肉驱动的下肢外骨骼康复机器人。
为探究外骨骼机器人运动状态和各关节运动机理之间的关系,采用拉格朗日方程对下肢外骨骼进行动力学建模,将建立好的虚拟样机模型导入Adams中进行动力学仿真,得到下肢外骨骼康复机器人在不同运动状态下各关节在运动过程中转矩的变化情况,对仿真数据进行分析,验证了数据的正确性,为下一步实物样机制作及驱动器的选择提供了理论依据。
关键词外骨骼机器人拉格朗日方程动力学仿真虚拟样机Simulation and Analysis of Dynamics of Lower Limb Exoskeleton Rehabilitation Robots Ma Xiaojun1Liu Yuyang1Jia Qiusheng2Liu Desheng3Liu Xunbao1Yuan Mingrun3(1School of Mechanical Engineering,Jiamusi University,Jiamusi154007,China)(2Harbin Bearing Group Corporation,Harbin150002,China)(3School of Information and Electronic Technology,Jiamusi University,Jiamusi154007,China)Abstract A lower limb exoskeleton rehabilitation robot can effectively improve the rehabilitation efficien⁃cy of patients with impaired lower limb motor function and reduce the workload of rehabilitation physicians. Therefore,a lower limb exoskeleton rehabilitation robot is designed,the relationship between the motion state of the exoskeleton robot and the motion mechanism of each joint is explored,the Lagrange equation to model the dynamics of the lower limb exoskeleton is used and the established virtual prototype model into Adams for dy⁃namic simulation is imported.Further,the torque changes of each joint of the lower limb exoskeleton rehabilita⁃tion robot in different motion states are obtained.The data are analyzed to verify the correctness of the data, which provides a theoretical basis for the next step of the physical prototype fabrication and the selection of the actuator.Key words Exoskeleton robot Lagrangian equation Dynamics simulation Virtual prototype0引言现如今,由于脑卒中、车祸或其他原因引起身体运动功能受损的人口数量在不断增加,从事有关康复训练的专业人员严重不足,因此,开发一种能够代替康复医师工作的机器人成为当下一个研究热点[1]。
基于外骨骼的可穿戴式下肢康复机器人结构设计与仿真

二、文献综述
传感器设计是下肢康复机器人的关键部分,它可以实时监测患者的运动状态 和机器人与患者之间的交互力。例如,一些传感器设计采用了力传感器,以监测 机器人与患者之间的相互作用力;还有一些传感器设计采用了运动传感器,以监 测患者的运动状态。
二、文献综述
然而,现有的下肢康复机器人在机构设计、控制系统和传感器设计等方面仍 存在一些问题和挑战。例如,一些机构的机械结构复杂,使得机器人的重量和体 积较大;一些控制系统的智能化程度较低,无法实现个性化的康复治疗;一些传 感器的准确性和稳定性有待提高。因此,本次演示将对外骨骼的可穿戴式下肢康 复机器人的结构设计进行探讨,并利用仿真技术对其进行优化和完善。
基于外骨骼的可穿戴式下肢康 复机器人结构设计与仿真
01 一、引言
目录
02 二、文献综述
03 三、研究设计
04 四、实证研究
05 五、案例分析
06 六、结论
一、引言
一、引言
随着现代医疗技术的不断发展,康复机器人作为一种新型的康复治疗手段, 逐渐在康复医学领域得到广泛应用。其中,基于外骨骼的可穿戴式下肢康复机器 人因其能帮助下肢运动功能障碍患者进行科学有效的康复治疗而受到特别。本次 演示将对外骨骼的可穿戴式下肢康复机器人的结构设计进行探讨,并利用仿真技 术对其进行优化和完善。
五、案例分析
五、案例分析
以一个实际案例为例,我们介绍如何利用外骨骼的可穿戴式下肢康复机器人 进行治疗,并对其效果进行评估和分析。该案例中,患者是一位因为脑卒中导致 下肢运动功能障碍的老年人。在使用外骨骼式下肢康复机器人进行为期三个月的 康复治疗后,患者的下肢运动功能得到了显著改善。通过机器人的辅助训练,患 者的步行速度和耐力都有了明显的提高。同时,患者在治疗过程中并未出现不适 或者皮肤损伤的情况,表明该机器人的安全性较高。
一种新型助力携行下肢外骨骼设计及仿真

2018年8月第46卷第15期机床与液压MACHINETOOL&HYDRAULICSAug 2018Vol 46No 15DOI:10.3969/j issn 1001-3881 2018 15 003收稿日期:2017-03-23基金项目:国家自然科学基金青年基金资助项目(51505263);山东省科技发展计划资助项目(2014GGX103007);山东省高等学校科技计划项目(J15LB08)作者简介:吴俊杰(1992 ),男,硕士研究生,研究方向为外骨骼机器人建模㊁仿真与优化㊂E-mail:961451673@qq com㊂通信作者:赵彦峻,E-mail:zyj6270110@163 com㊂一种新型助力携行下肢外骨骼设计及仿真吴俊杰1,赵彦峻1,张忠东1,乔学昱1,张健2(1.山东理工大学机械工程学院,山东淄博255049;2.苏州纽威阀门股份有限公司,江苏苏州215000)摘要:设计了一种非拟人型下肢外骨骼,主要是由座椅㊁髋关节㊁大腿部结构㊁膝关节㊁小腿部结构㊁踝关节和鞋子依次串联而成,采用电机驱动㊂对下肢外骨骼进行了自由度分配与结构分析,根据坐标变换,运用D⁃H法建立下肢外骨骼的运动学模型㊂建立了下肢外骨骼虚拟样机模型,利用多体动力学仿真软件ADAMS进行运动学仿真㊂仿真结果验证了理论模型的合理性,为后期进一步研究外骨骼提供了依据㊂关键词:下肢外骨骼;运动学分析;D⁃H法;仿真中图分类号:TP242㊀㊀文献标志码:A㊀㊀文章编号:1001-3881(2018)15-012-4DesignandSimulationofaNewTypeofPowerAssistedPortableExoskeletonforLowerLimbsWUJunjie1,ZHAOYanjun1,ZHANGZhongdong1,QIAOXueyu1,ZHANGJian2(1.SchoolofMechanicalEngineering,ShandongUniversityofTechnology,ZiboShandong255049,China;2.NewayValve(Suzhou)Co.,Ltd.,SuzhouJiangsu215000,China)Abstract:Anon⁃anthropomorphicexoskeletonrobotdesignedismainlysuccessivelywiredinseriesbyaseat,ahipjoint,athigh,akneejoint,aleg,anankleandashoe,whichisdrivenbyanelectricmotor.Thestructureofthelowerlimbexoskeletonwasanalyzedanditsdegreesoffreedomweredistributed.Accordingtothecoordinatetransformation,theD⁃Hmethodwasusedtoestablishthekinematicsmodelofthelowerlimbexoskeleton.Thevirtualprototypemodeloflowerlimbexoskeletonwasestablished,andtheki⁃nematicssimulationwascarriedoutbyusingmulti⁃bodydynamicssimulationsoftwareADAMS.Thesimulationresultsverifytheration⁃alityofthetheoreticalmodel,whichlaidthefoundationforthelaterstudyoftheexoskeleton.Keywords:Lowerlimbexoskeleton;Kinematicanalysis;D⁃Hmethod;Simulation0㊀前言下肢残疾及老龄化人口的数量急增,给社会㊁家庭和个人生活带来巨大困难,康复训练与老龄人行走问题成了社会需要解决的一大难题㊂下肢外骨骼能够帮助人类解决这个问题,它可以辅助老年人行走,给他们的日常生活带来极大的方便[1]㊂人体下肢外骨骼能够将机器强大的机械能量与人类智能结合起来[2]㊂目前,下肢外骨骼主要运用于军事,例如BLEEX系列[3],也有应用于医疗,例如HAL系列[4]㊂针对辅助人体行走等问题,设计了一种下肢外骨骼,如图1所示,采用了非拟人型结构设计,与人体无直接绑缚连接,髋关节采用电机驱动,膝关节和踝关节为阻尼装置驱动㊂它可以帮助分担人体质量,有效增强人体的机能,不仅可以用于帮助中老年人行走㊁辅助残疾人行走,还可以应用于某些需要长时间站立㊁行走的工作,以缓解疲劳,提高工作效率㊂图1㊀下肢外骨骼1㊀结构设计1 1㊀自由度分配在研究人体下肢系统的基础上,设置下肢外骨骼双腿具有12个自由度㊂即每条腿的髋关节保留了屈/伸和外展/内收2个自由度,膝关节仅保留了屈/伸1个自由度,而踝关节保留了屈/伸㊁背屈和跖屈3个自由度㊂鞋子可以弯曲㊂1 2㊀机械结构设计在设计外骨骼时考虑了身材的兼容性,外骨骼的机械结构可调节其长度,因此其大腿杆㊁小腿杆应预留一定的调整范围[5]㊂根据GB10000⁃1988‘中国成年人人体尺寸“中测量数据进行设定,采用身高1700mm,体重60kg为标准,大腿杆的平均长度为465mm,小腿杆的平均长度369mm,以此数据设计外骨骼结构㊂1 2 1㊀踝关节设计人体踝关节是小腿和脚的连接处,有3个转动自由度,是一处比较关键和灵活的关节也是承受身体质量最多的关节㊂为了使外骨骼更加符合人体工程学,踝关节采用球铰链接,保留了全部自由度,既可以承受较大负荷,也可以实现3维转动㊂同时,考虑到人体脚踝的脆弱性和踝关节转动角度范围,对其进行保护限位,当球铰上部绕球心转动到一定角度时会与鞋子上的安装孔发生干涉,从而起到角度限位作用㊂为了保证踝关节的柔性连接,增加了圆柱压缩弹簧,可以起到储存能量㊁自动回位及缓冲的作用,如图2所示㊂图2㊀踝关节结构1 2 2㊀髋关节设计髋关节保留了两个转动自由度㊂由于外骨骼穿戴图3㊀行星齿轮传动简图时置于两腿之间,在该位置,无法直接设计出实际的外骨骼髋关节㊂因此,采用如图3所示的行星轮传动机构,将电机安装在大腿板上,通过半偏轴与小齿轮配合,从而带动小齿轮转动,使得电机㊁大腿机构也绕大齿轮中心转动,如图4所示㊂图4㊀髋关节结构座椅连接板与大齿轮采用螺栓连接,螺母紧固,大齿轮留有一定的活动空间,便于旋转转动,从而实现髋关节的外展/内收运动㊂2㊀外骨骼运动学分析2 1㊀坐标系建立在运动时,空间中末端操作器的位姿与一系列关节变化角度之间的关系是机器人运动学的主要研究内容[6]㊂控制下肢外骨骼的过程中,为了能够实时地了解人体所处的运动状态,需要迅速地获得踝关节位姿与各个关节之间的距离㊂而运动学正向求解就是通过关节变量值求出末端控制器在空间笛卡尔坐标系下的位姿;反之,通过机器人末端的位置和姿态,求出所需的关节变量值即为求运动学逆解㊂外骨骼是一系列由关节连接起来的连杆所组成[7],对于串联机器人一般运用D⁃H法来建立运动学模型[8]㊂由于外骨骼两侧的机械结构为左右对称,而人体的步态周期具有周期性,因此仅对单腿结构进行研究,如图5所示,采用D⁃H法对外骨骼机器人右腿建立运动学坐标系[9],基坐标系O0在右腿髋关节处,站立姿态为初始零位㊂获得外骨骼的D⁃H参数表,见表1㊂表中,θi为连杆转角;ai为连杆长度;αi为连杆扭角㊂图5㊀外骨骼运动学模型㊃31㊃第15期吴俊杰等:一种新型助力携行下肢外骨骼设计及仿真㊀㊀㊀表1㊀外骨骼D⁃H参数表连杆iθiaiαi1θ1a10ʎ2θ2090ʎ3θ3a30ʎ4θ4a40ʎ2 2㊀正运动学求解在外骨骼所建立的坐标系的基础上,利用齐次变换矩阵将各个坐标系相互联系起来㊂根据表1给出的D⁃H参数,计算外骨骼相邻两杆的齐次变换矩阵i-1iT:01T=Trans(x1,a1)100a1010000100001éëêêêêêùûúúúúú12T=Rot(z1,θ2)㊃Rot(x2,α2)cosθ20sinθ20sinθ20-cosθ2001000001éëêêêêêùûúúúúú23T=Rot(z2,θ3)㊃Trans(x3,a3)cosθ3-sinθ30a3cosθ3sinθ3cosθ30a3sinθ300100001éëêêêêêùûúúúúú34T=Rot(z3,θ4)㊃Trans(x4,a4)cosθ4-sinθ40a4cosθ4sinθ4cosθ40a4sinθ400100001éëêêêêêùûúúúúú将上述齐次坐标变换矩阵依次相乘可以得到外骨骼的坐标变换矩阵04T=01T㊃12T㊃23T㊃34T:04T=c2c34-c2s34s2a4c2c34+a3c2c3+a1s2c34-s2s34-c2a4s2c34+a3s2c3s34c340a4s34+a3s30001éëêêêêêùûúúúúú(1)其中c1代表sinθ1,c1代表cosθ1,s12代表sin(θ1+θ2),其他类似㊂若令θ1=0,θ2=90ʎ,θ3=145ʎ,θ4=75ʎ,并将有关常量代入到式(1),得到:04T=001a1-0 7660 6430-0 766a4-0 819a3-0 643-0 7660-0 643a4+0 574a30001éëêêêêêùûúúúúú这与人体站立时的位姿一致,证明了外骨骼的D⁃H坐标系与运动学正解是正确的㊂由式(1)可以得到外骨骼踝关节的运动方程为:px=a4c2c34+a3c2c3+a1py=a4s2c34+a3s2c3pz=a4s34+a3s3ìîíïïïï式中:px㊁py㊁pz分别为踝关节在x㊁y㊁z方向上的位移㊂2 3㊀逆运动学求解在工程应用中,逆运动学对于外骨骼的轨迹控制与步态规划更为重要[9]㊂假定已知外骨骼末端位姿矩阵,分别求各关节角度㊂04T=nxoxaxpxnyoyaypynzozazpz0001éëêêêêêùûúúúúú=10T12T23T34T将方程两端同时左乘12T-10㊀1T-1即12T-10㊀1T-10㊀4T=23T23T联立方程组,可得:c3c4-s3s4=c2nx+s2ny=ozs3c4+c3s4=nz=-c2ox-s2oya4c34+a3c3=c2px+s2py-a1c2a4s34+a3s3=pys2px-c2py-a1s2=0ìîíïïïïïï可求得:θ2=Atanpypx-a1θ4=Acosc22(p2x+a21+2a1px)-2s2c2(pxpy+a1py)-a24-a232a3a4θ3=Atannzozæèçöø÷-θ4求解反三角函数往往造成机器人运动学逆解具有多个,为此必须结合实际情况与机械结构特点做出判断,以选择合适的解㊂3 下肢外骨骼仿真利用SOLIDWORKS完成对外骨骼机械结构的几何建模,并导入ADAMS进行设定,建立虚拟样机,模拟下肢外骨骼在虚拟环境中的运动过程,直观地分析外骨骼运动学[10-11]㊂由于文中仅研究外骨骼应用于直线助力辅助行走,所以仅保留人体矢状面内的关节运动,其余平面的关节设置为固定约束㊂依据外骨骼运动特性,以前述公式为基础设置驱动数据[12],通过仿真获得了踝关节在运动时Y㊁Z方向的位移曲线和髋关节与膝关节的输出角度变化曲线,如图6㊁图7所示㊂㊃41㊃机床与液压第46卷㊀图6㊀踝关节Y㊁Z方向㊀㊀㊀㊀图7㊀髋关节与膝关节输的仿真位移曲线出角度变化曲线由图6获得踝关节在运动过程中的位姿变化曲线,踝关节在Y㊁Z方向做往复运动,在Z方向位移变化最大,为前进方向㊂对比踝关节位移的图6仿真曲线与图8理论曲线,如表2所示,可知两种结果中位移变化存在一定的误差,但总体相差不大,在误差允许范围之内,理论曲线更加连续平缓㊂外骨骼髋关节与膝关节的输出角度变化曲线符合人体正常运动的步态,证明可以实现携带人体行走㊂图8㊀踝关节Y㊁Z方向的理论位移曲线表2㊀踝关节位移值时间/s00 51 01 52 0踝关节仿真Y位移/mm0-36003217踝关节理论Y位移/mm2-365-32326-8髋关节仿真Y位移/mm01350653髋关节理论Y位移/mm-7124135774㊀总结介绍了下肢外骨骼的基本结构设计,对自由度进行分配,并以此为基础,利用坐标变换与D⁃H法建立运动学模型,求出机器人正㊁逆运动学解,建立脚踝部与各关节角度之间的关系㊂最后,根据现实应用环境,对外骨骼运用仿真软件ADAMS进行运动学仿真㊂仿真结果证明了外骨骼结构的合理性,行走步态与人的步态相同,为后续工作提供了理论基础与数据参考㊂参考文献:[1]沈凌,孟青云,喻洪流.基于虚拟样机技术的下肢假肢结构设计与仿真[J].工程设计学报,2011,18(1):34-37.SHENL,MENGQY,YUHL.DesignandSimulationofLegProsthesisStructureBasedonVirtualPrototypeTechnology[J].JournalofEngineeringDesign,2011,18(1):34-37.[2]YANGCJ,NIUB,CHENY.AdaptiveNeuro⁃fuzzyControlBasedDevelopmentofaWearableExoskeletonLegforHu⁃manWalkingPowerAugmentation[C]//IEEE/ASMEIn⁃ternationalConferenceonAdvancedIntelligentMechatron⁃ics.Monterey.California,2005:467-472.[3]ZOSSA,KAZEROONIH,CHUA.OntheMechanicalDe⁃signoftheBerkeleyLowerExtremityExoskeleton(BLE⁃EX)[C]//IEEE/RSJInternationalConferenceonIntell⁃gentRobotsandSystems.Edmonton,2005:3132-3139.[4]王伟.可穿戴机器人的研究现状和面临的挑战[J].机器人技术与应用,2013(4):12-16.[5]赵彦峻,葛文庆,刘小龙,等.外骨骼机器人设计及其机械结构的有限元分析[J].机床与液压,2016,44(3):10-13.ZHAOYJ,GEWQ,LIUXL,etal.DesignofExoskeletonRobotandFiniteElementAnalysisofMechanicalStructure[J].MachineTool&Hydraulics,2016,44(3):10-13.[6]崔谨想.下肢外骨骼机器人系统建模与仿真实验研究[D].哈尔滨:哈尔滨工业大学,2014.[7]理查德㊃摩雷,李泽湘,夏恩卡.萨思特里.机器人操作的数学导论’M].北京:机械工业出版社,1998:45-49.[8]许路航,王钰,王志乐.上肢外骨骼运动的逆向求解仿真[J].科学技术与工程,2011,11(14):3331-3335.XULH,WANGY,WANGZL.ReserveSolvingandSimu⁃lationontheMotionofUpper⁃limbExoskeleton[J].ScienceTechnologyandEngineering,2011,11(14):3331-3335.[9]SANTISAD,SICILIANOB.InverseKinematicsofRobotManipulatorswithMultipleMovingControlPoints[M]//LENARC㊅IC㊅J,WENGERP.AdvancesinRobotKinematics:AnalysisandDesign.Berlin:SpringerNetherlands,2008:429-438.[10]易嘉伟,程文明,濮德璋.携行式外骨骼下肢运动学分析与仿真[J].机械设计制造,2014(2):171-174.YIJW,CHENGWM,PUDZ.TheKinematicsAnalysisandSimulationofLowerExtremityPortableExoskeleton[J].MachineryDesign&Manufacture,2014(2):171-174.[11]梁青,宋宪玺,周烽,等.基于ADAMS的双足机器人建模与仿真[J].计算机仿真,2010,27(5):162-165.LIANGQ,SONGXX,ZHOUF,etal.ModelingandSimu⁃lationofBipedRobotBasedonADAMS[J].ComputerSimulation,2010,27(5):162-165.[12]刘小龙,赵彦峻,葛文庆,等.医疗助力下肢外骨骼设计及动力学仿真分析[J].工程设计学报,2016,23(4):327-332.LIUXL,ZHAOYJ,GEWQ,etal.DesignandDynamicsSimulationAnalysisofMedicalDisabledLowerLimbExo⁃skeleton[J].ChineseJournalofEngineeringDesign,2016,23(4):327-332.(责任编辑:卢文辉)㊃51㊃第15期吴俊杰等:一种新型助力携行下肢外骨骼设计及仿真㊀㊀㊀。
下肢康复外骨骼机器人动力学分析及仿真
下肢康复外骨骼机器人动力学分析及仿真一、本文概述随着医疗科技的快速发展,下肢康复外骨骼机器人作为一种新型康复设备,正日益受到研究者和医疗工作者的关注。
本文旨在对下肢康复外骨骼机器人的动力学特性进行深入分析,并通过仿真实验验证其理论分析的准确性。
文章首先介绍了下肢康复外骨骼机器人的研究背景和应用意义,阐述了其动力学分析的重要性。
随后,本文详细阐述了下肢康复外骨骼机器人的动力学建模过程,包括机器人的运动学模型、动力学模型以及控制模型的建立。
在建模过程中,考虑了机器人的结构特点、运动规律以及人机交互等因素,确保了模型的准确性和实用性。
在完成动力学建模后,本文利用仿真软件对下肢康复外骨骼机器人的动力学特性进行了仿真实验。
仿真实验包括了机器人在不同运动状态下的动力学响应、人机交互过程中的力传递特性以及控制策略的有效性等方面。
通过仿真实验,本文验证了动力学模型的正确性,并为后续的实物实验提供了理论支持。
本文总结了下肢康复外骨骼机器人动力学分析及仿真的主要研究成果,并指出了未来研究方向。
通过本文的研究,不仅有助于深入理解下肢康复外骨骼机器人的动力学特性,还为优化机器人设计、提高康复效果以及推动医疗康复领域的发展提供了有益的参考。
二、下肢康复外骨骼机器人概述下肢康复外骨骼机器人是一种辅助人体下肢运动,帮助进行康复训练的先进医疗设备。
这种机器人通过精密的机械结构和智能控制系统,能够实时地感知并适应穿戴者的运动意图,提供必要的助力或阻力,以达到改善运动功能、增强肌肉力量、促进神经恢复等康复目标。
下肢康复外骨骼机器人通常由支架、传感器、执行器、控制系统等部分组成。
支架负责支撑和保护穿戴者的下肢,同时提供运动的轨迹和范围。
传感器则负责实时感知穿戴者的运动状态、肌肉力量、姿态等信息,为控制系统提供决策依据。
执行器则根据控制系统的指令,驱动机械结构产生相应的动作,提供助力或阻力。
在动力学分析方面,下肢康复外骨骼机器人需要考虑穿戴者的运动学特性和动力学特性,以及机器人自身的机械特性、控制特性等因素。
外骨骼机器人结构设计与动力学仿真
骨骼 机 器人髋 关节 、 膝关 节 的动力学 参数 , 分析 了仿 真结果 的正 确性 , 为外 骨骼 机器人 的结 构设计 提供 了可 靠 的依 据 。 关 键词 : 外 骨骼 机器人 ; 结 构设计 ; 动力 学仿 真
0 引 言
外骨骼机器人 是一种可穿戴在人体外 部的机械装 置 , 可用 于帮助下肢瘫痪患者进 行康 复训 练或帮助其实现正 常行走 , 也
耋 量 坌 堑 ! s n e j i v u F e n × 外 骨骼 机 器 人 结构 设 计 与 动 力学 仿 真
张 楠Байду номын сангаас易 子凯
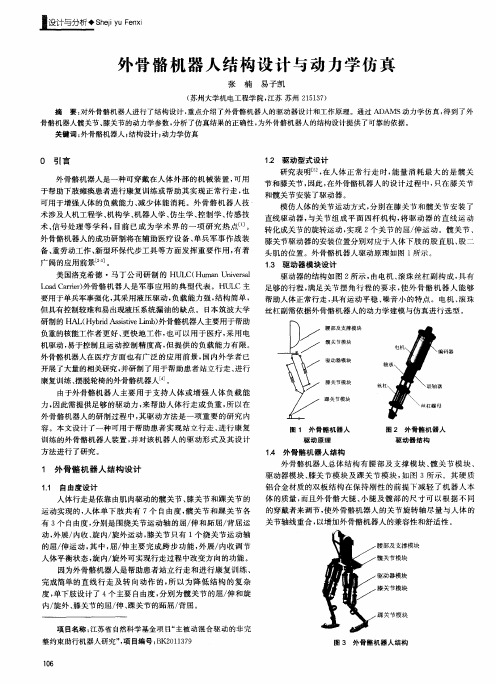
( 苏 州大 学机 电工程 学 院 , 江苏 苏州 2 1 5 1 3 7 ) 摘 要: 对 外骨 骼机器 人进 行 了结构设 计 , 重点介 绍 了外骨骼 机器 人 的驱动器 设计 和工 作原理 。通 过 AD AMS动力 学 仿真 , 得 到 了外
1 _ 2 驱 动型 式 设 计
研 究 表 明[ 5 ] , 在人体 正常行 走 时, 能 量 消 耗 最 大 的 是 髋 关 节 和膝 关 节 , 因此 , 在 外 骨 骼机 器 人 的 设 计 过 程 中 , 只在 膝 关 节
和髋关节安装 了驱动器 。 模仿人体 的关节运动方式 , 分别在膝关节 和髋关节 安装 了
关节轴线 重合 , 以增加外骨骼机器人 的兼容性 和舒适性 。
腰部及支撑模块 髋关 节模块
因为外 骨骼机器人是帮助患者站立行走 和进行康 复训 练 、 完成简单的直线 行走 及转 向动作 的 , 所 以为降 低结 构 的复杂
腰部及支撑模块 靛关节模块
美 国洛克希德 ・ 马 丁公 司研制 的 HU L C ( H u ma n U n i v e r s a l L o a d C a r r i e r )  ̄ b 骨骼机器人 是军事应用 的典型代表 。HUL C主 要用于单兵军事强化 , 其采用液压驱动 , 负载能力 强, 结构简单 , 但具有控制较难和易出现液压 系统漏油 的缺 点。 E l 本筑波大学 研制 的 HA L ( Hy b r i d As s i s t i v e L i mb )  ̄ , 骨骼机器人主要用于帮助
穿戴式下肢负重外骨骼机械人机构设计与动力学仿真_杨凯
图2
外骨骼自由度设计实体模型
3 步行质心轨迹生成
3.1 可变 ZMP 的三维倒立摆模型
利用 D-H(Denavit-Harenberg)建模方法及 4×4 齐次变换矩阵来描述外骨骼下肢各连杆 坐标和相对空间的几何关系[5]。为合理规划下肢外骨骼的步行关节轨迹,可以将其简化为一 个图 3 所示的三维倒立摆模型, 并且让 ZMP 点在脚底着地的稳定区域内按照某种规律合理地 ,则脚的踝关节到脚的边缘的 变化。其中,取踝关节所在的位置为基准坐标系 P0=(x0, y0, z0) 距离分别为 La、 Lb、 Lc、 Ld 。 质心的位置为 Pcog=[xcog , ycog , zcog]T, 零力矩点的位置为 Pzmp=[xzmp , yzmp , 0]T。下肢外骨骼机械人在步行周期内,假设其质心的高度位置始终为 Hc;质心在竖直
()
式中,k 为 ZMP 的可变系数,且满足 0 k 1 ,当 k =0 时,ZMP 的可变范围最小,固定在 脚底的中点位置;当 k =1 时,ZMP 的可变范围最大,可以在整个脚底范围内变化。由公式(1)、 (2)经积分得到单脚支撑期的质心运动轨迹公式为:
xc xc cos t t0 t t0 cTs sin x x zmp Ts Ts
X0
图 3 三维倒立摆模型
3.2 按照余弦规律变化的 ZMP 运动轨迹
以 C.Zhu 等人提出的 ZMP 倒立摆模型生成步行轨迹方法[6]。在此研究成果基础上提出按 照余弦规律变化的可变 ZMP 方法。定义可变 ZMP 的时间函数为:
L a Lb L Lb t k cos( ) a Ts 2 2 Lc Ld Lc Ld t y zmp ( t ) k cos( ) Ts 2 2 x zmp ( t )
外骨骼机器人的控制算法与运动仿真

外骨骼机器人的控制算法与运动仿真现代科技的迅速发展,带来了许多令人惊叹的科技产品,其中外骨骼机器人便是其中之一。
外骨骼机器人是一种可穿戴设备,可以帮助人们在行走、跑步、爬楼梯等活动中增强肢体的力量和稳定性,并能够在医疗、工业、军事等领域发挥重要作用。
但是,外骨骼机器人的实现并不简单,需要先进的控制算法和运动仿真技术来保证机器人的行走和稳定性。
本文将会详细介绍外骨骼机器人的控制算法和运动仿真技术。
一、外骨骼机器人的控制算法1.1 外骨骼机器人的运动学模型为了设计外骨骼机器人的控制算法,首先需要建立机器人的运动学模型。
运动学模型是描述机器人姿态、关节角度和运动规律的数学模型。
外骨骼机器人的运动学模型一般采用欧拉角或四元数来描述机器人的姿态,同时通过关节角度来描述机器人的运动。
另外,机器人的连杆长度和连接方式也需要考虑到,这些参数对机器人的控制和稳定性有很大的影响。
1.2 外骨骼机器人的运动控制外骨骼机器人的控制算法一般包括运动控制和力控制两个部分。
运动控制是指控制机器人的关节角度和运动轨迹,使机器人达到预定的运动目标。
外骨骼机器人一般采用PID控制算法或者模型预测控制算法来进行运动控制。
PID控制算法是一种经典的控制方法,通过比较机器人实际位置和预定位置的误差,来调整机器人的关节角度和运动轨迹。
模型预测控制算法则是通过对机器人运动过程的建模,来预测机器人的运动轨迹和关节角度,并进行控制。
1.3 外骨骼机器人的力控制力控制是指对机器人所施加的力进行控制,使机器人可以承受外部扰动和重力,并保持稳定。
外骨骼机器人的力控制算法一般采用阻抗控制算法或者力矩控制算法来实现。
阻抗控制算法是一种在工业机器人中广泛使用的控制算法,其通过控制机器人与环境之间的力交换,来实现对机器人的稳定控制。
力矩控制算法则是直接对机器人的关节力矩进行控制,以达到稳定机器人的目的。
二、外骨骼机器人的运动仿真为了验证外骨骼机器人的控制算法和稳定性,需要进行运动仿真实验。
下肢外骨骼助力装置结构与动力学分析
下肢外骨骼助力装置结构与动力学分析随着科学技术的进步和人们对于增强自身能力的渴望,下肢外骨骼助力机器人已成为国内外“人机一体化”的一个重要研究方向。
文章介绍了下肢外骨骼助力装置的研究意义,具体阐述了下肢外骨骼助力机器人整体结构的设计、及动力学分析等。
通过实验仿真验证驱动电机选型的可靠性。
全面阐述了下肢外骨骼助力机器人的结构设计方案。
标签:下肢外骨骼机器人;结构设计;动力学;仿真引言现在的交通越来越发达,人们可以用各种各样的交通工具来运载重物以及帮助人们到达目的地,但是在自然界中许多崎岖不平甚至很陡峭的地方交通工具也很难到达;随着时代的发展,老龄化问题也越来越严重,越来越多的老年人需要被照料;再者,残疾人士(更多的是下肢瘫痪或者行走困难的人)也需要借助一些工具来适应这个世界,因此开发出一些操作简单、价格合理的智能机械装置用于帮助人们运载重物、辅助老年人以及残疾人,帮助他们照料自己或者进行康复训练无疑是解决目前老龄化问题的一个有效措施。
下肢外骨骼助力系统实质上是一种可穿戴的人机一体化系统,其以人为核心,由穿着者进行控制操作,所以机械结构的设计需要尽量的拟人化,这样才能更好的配合穿戴者完成任务。
1 结构设计1.1 结构设计原则根据下肢外骨骼机器人可穿戴性的特点,在对其机械结构进行设计时,应当充分考虑以下四个设计原则。
(1)安全可靠。
由于下肢外骨骼机器人的使用对象是人,所以机械结构应当保证机器人在正常使用的时候和出现故障时,都能较好地确保穿戴者的人身安全。
(2)拟人化设计。
机械结构应尽量模拟真实的人体下肢运动关节及大小腿骨;在自由度配置和各关节的设计上,尽力满足人体下肢关节活动范围要求。
(3)可伸缩性。
由于不同的人的身材不同,因而其下肢的几何尺寸也不相同。
因此,要求机械腿的长度在一定范围可调,提高下肢外骨骼机器人的通用性。
(4)坚固耐用、轻巧便携。
下肢外骨骼机器人在使用时,即要承受其自身重量又要承载穿戴者的重量,同时还需承受外界的刚性冲击[1]。
新型下肢外骨骼机器人动力学仿真

第6期2021年6月300机械设计与制造Machinery Design & Manufacture 新型下肢外骨骼机器人动力学仿真邓斌,赵英朋(西南交通大学先进驱动节能技术教育部工程研究中心,四川 成都610031)摘要:人体躯干能够根据负载重量而自适应调节前倾角度,有利于人体对下肢外骨骼的控制和人机系统行走稳定性。
当超出一定负重时,躯干前倾困难。
设计一种新型號背结构,利用负重重量增加躯干前倾角度。
首先分析人体步态,方 便仿真时施加约束和驱动等元素;然后将人体简化为七杆模型,用Kane 方法建立动力学方程,减少中间变量,提高计算效 率;最后通过Adams 进行动力学仿真验证。
仿真得到的结果表明:承载负重之后,髓背机构能使人体躯干前倾更加省力, 人机系统重心位置相比于之前接近稳定区域,并且系统重心比之前有所降低,进一步保证系统稳定。
关键词:外骨骼;步态分析;动力学;仿真;Kane 方法中图分类号:TH16 文献标识码:A 文章编号:1001-3997(2021)06-0300-05Dynamics Simulation of New Exoskeleton RobotDENG Bin, ZHAO Ying-peng(Ministry of Education Engineering Research Center for Advanced Driving and Energy-saving Technology , Southwest Ji ao Tong University, Sichuan Chengdu 610031, China)Abstract : The human torso adaptive control the forward angle according to the load weight, which is beneficial to the humanbody to control the lower limb exoskeleton and the walking stability of man-machine system. When the load exceeds a certain range , it is difficult f or the torso to lean f orward. In this paper, a new type of hip back structure is designed, which is used to in crease the angle of f orward tilt of t he trunk. Firstly, analyze the human gait, which makes it corwenient to apply constraints anddriving elements in simulation;And then simplify the human body into a seven-bar model, Using Kane method to establish dy namic equations 9 reduce intermediate variables and improve calculation efficiency; Finally, the dynamics simulation is carried out by Adams. The simulation results show thati After carrying load, the hip back mechanism can make the body lean f orwardand save more power, the center of g ravity of m an-machine system is closer to the stable region than before 9 a nd the center of g ravi ty of t he system is lower than before 9 w hich f urther ensures the stability of t he system.Key Words : Exoskeleton ; Gait Analysis ; Dynamics ; Simulation ; Kane Method1引言随着科学技术日新月异的发展,下肢外骨骼机器人技术也得到快速的更迭,针对不同场合具有更加良好的适应性。
一种多功能下肢外骨骼机器人的设计与仿真分析

一种多功能下肢外骨骼机器人的设计与仿真分析贾丙琪毕文龙魏笑徐国鑫赵彦峻孙一栋(山东理工大学机械工程学院,山东淄博255049)摘要针对老年人以及下肢运动障碍患者的康复训练和运动代步的需求,设计了一种多功能下肢外骨骼机器人,利用辅助起立机构和腿部外骨骼实现对使用者下肢的康复训练。
分别了建立外骨骼机器人单腿支撑阶段和双腿支撑阶段5杆模型,采用拉格朗日方法推导出动力学模型,计算各关节所需的理论力矩;建立虚拟样机模型进行动力学仿真,仿真数据与理论数据进行比较,验证了理论推导的准确性和外骨骼机器人设计的合理性,为后续电机选型提供了依据。
关键词下肢外骨骼结构设计动力学计算仿真分析Design and Simulation Analysis of Multi-purpose Lower Limb Exoskeleton Robot Jia Bingqi Bi Wenlong Wei Xiao Xu Guoxin Zhao Yanjun Sun Yidong(School of Mechanical Engineering,Shandong University of Technology,Zibo255049,China)Abstract Aiming at the needs of rehabilitation training and movement substitution for the elderly and pa⁃tients with lower limb movement disorders,a multi-purpose lower limb exoskeleton robot is designed,which utilizes auxiliary standing mechanism and exoskeleton to realize the rehabilitation training of lower limbs for us⁃ers.Five-bar models of the one-leg support stage and the two-leg support stage of the exoskeleton robot are es⁃tablished,and the dynamics model is deduced by Lagrange method to deduce the theoretical moments required for each joint.A virtual prototype model is established to carry out dynamics simulation,and the simulation data is compared with the theoretical data to verify the rationality of the design of the exoskeleton robot with the accu⁃racy of the theoretical deduction,which provides a theoretical basis for motor selection.Key words Lower limb exoskeleton Structure design Dynamics calculation Simulation analysis0引言我国老龄化进程持续加快,老年人脑血管疾病的术后康复问题引起更多人的关注。
穿戴式下肢外骨骼机器人的结构设计与仿真_孙明艳
图 6 虚拟样机模型
表 1 髋、膝、踝关节输入输出角度 偏差函数的情况
关节
右髋关节 左髋关节 右膝关节 左膝关节 右踝关节 左踝关节
最大幅值 26.85 21.1 0.113 0.104 88.77 99.57
偏差函数 均值 -26.85 21.06 -0.031 -0.025 -88.77 -99.57
外骨骼机器人整体结构如图 1 所示,其中 腰带结构 1 用以模拟人体大腿与髋部的连接形 式,来满足人在运动过程中机械结构的自由度 要求;大腿杆 3 用以连接髋关节和膝关节;膝 关节 4 采用四杆机构替代传统的单自由度的转 动副结构;小腿杆 5 用以连接膝关节和踝关节。
其中膝关节设计采用四连杆结构,通过优 化可以使四杆机构的瞬心轨迹与人体膝关节瞬 心轨迹接近,从而达到外骨骼与人体协调性较 好的目的。许多文献都曾报道过四杆机构膝关 节的具体设计和优化,在此直接参考文献中的 具体尺寸,如图 2 所示,其中 LAB=58.1,LBC =49.5,LCD=50.2,LDA=32.6,α=25.52,θ4 =26[10]。
外骨骼机器人,是一种可供人体穿戴的人 机一体化的智能机械装置[1]。利用它不仅可以 增强士兵的负重能力、跑跳能力、肢体力量、 以及防护能力,从而全面提高士兵的野外作战 水平,还能使士兵在车辆不能到达的复杂地形 条件下完成长途跋涉和侦察工作,因而具有广
泛的军事应用前景[2]。近年来该领域的研究受 到了广泛的重视,许多国家着眼于未来战争的 需要,都在积极投入研制。目前,美国在这方 面的研究走在了世界前列。先后研制了针对单 兵使用的代号为 BLEEX、HULC、XOS、XOS2、 XOS3 等外骨骼机器人,其中 HULC 系统已经
状面内腿和脚的运动,其他不考虑。结果是: 髋关节,膝关节,踝关节各设置一个自由度, 可实现大腿、小腿和脚的屈伸。
外骨骼机器人的设计与优化

外骨骼机器人的设计与优化外骨骼机器人是一种基于人机交互的机器人,它将机器人的力量和技能与人体的动力学相结合,通过外骨骼机械的支持和增强来提高人体的移动和工作能力。
它可以广泛应用于医疗保健、军事、建筑、制造业等领域。
外骨骼机器人的设计与优化成为了外骨骼技术开发中最重要的方面之一。
一、外骨骼机器人的类型外骨骼机器人按照工作方式和形态可以分为多个类型。
例如,仅仅支撑和移动肢体的外骨骼称为外骨骼支撑系统;拥有关节并允许运动的外骨骼被称为外骨骼运动系统。
外骨骼的驱动方式可以分为电池、气动、液压、人力等多种方式。
二、外骨骼机器人的设计过程外骨骼机器人设计的基本过程包括:需求分析、机器人系统结构设计、外骨骼机械设计、控制系统设计等。
这些设计过程相互联系,必须进行综合考虑和协调,以保证外骨骼机器人的各项指标达到优化。
在需求分析阶段,需要确定外骨骼机器人的具体应用场景、用户需求和技术要求等。
在机器人系统结构设计阶段,需要确定外骨骼机器人的总体结构、传动连接方式、传感器系统及其布局和控制系统结构等。
在外骨骼机械设计阶段,需要考虑材料性能、刚度、力传递等因素,结合人体生理学原理来设计合适的外骨骼机械。
在控制系统设计阶段,需要确定机器人的控制策略、控制算法和系统实现方案等。
三、外骨骼机器人的优化设计外骨骼机器人的优化设计是针对设计过程中出现的问题,通常通过仿真分析、试验验证和优化算法等方法进行优化。
以下是几个涉及优化的方面:1. 动力学优化在选择驱动方式和机械结构的设计中,需要考虑力传递和关节的运动学和动力学特性,以最好地适应人体生理力学。
动力学的优化主要通过数学模型建立和仿真模拟等方法实现。
2. 性能优化外骨骼机器人的应用是提高人体运动能力和减少疲劳程度。
因此,性能优化是满足人体需求的一个关键方面。
例如,外骨骼穿戴时需要传感器和控制系统支持,以实现实时调整与人体的协同。
3. 结构优化机器人结构设计是外骨骼机器人工作稳定性和传递效率等重要因素。
下肢外骨骼机器人动力学分析及设计

下肢外骨骼机器人动力学分析及设计下肢外骨骼机器人是一种可穿戴的机器人装置,用于协助、增强下肢功能。
它可以帮助行动有困难的人恢复行走能力,并减少肌肉疲劳,预防康复训练中的二次损伤。
下肢外骨骼机器人的设计需要考虑动力学分析,以确保装置能够提供合适的力学支持和协助运动,本文将从动力学分析和设计两个方面进行详细介绍。
首先,动力学分析是下肢外骨骼机器人设计的重要一环。
在运动学分析的基础上,动力学分析主要包括对关节力矩、关节角加速度、节段质量和重心位置等参数的计算和优化。
通过动力学分析,可以确定下肢外骨骼机器人在不同动作状态下所需的力矩和力量,从而为后续的机械设计提供参数参考。
其次,下肢外骨骼机器人的设计需要考虑机械结构、驱动系统和传感器系统等方面。
机械结构设计需要根据人体运动学原理,确定骨骼装置的连接方式、关节设计和腿部外壳材料等,以确保其具备符合人体工学要求的功能和舒适度。
驱动系统设计中需要考虑驱动电机的选择和布局,以及驱动传动装置的设计,以确保机器人能够提供合适的力量和速度。
传感器系统设计中需要考虑使用压力传感器、角度传感器和力传感器等多种传感器,以获取人体运动状态和力矩变化,进一步改善驱动系统的性能。
此外,下肢外骨骼机器人的控制策略也是设计的重要一环。
控制策略应该根据动力学分析的结果,结合传感器获得的数据,实现合适的力量输出和动作控制,提供舒适的运动支持。
常见的控制策略包括基于位置、力矩和运动感知的控制方法,可以根据具体需求进行选择。
同时,控制系统还需要考虑实时性和稳定性,以提供适应性的支持。
总结起来,下肢外骨骼机器人的设计需要从动力学分析和设计两个方面综合考虑。
动力学分析可以提供关节力矩、关节角加速度、节段质量和重心位置等参数参考;设计方面需要考虑机械结构、驱动系统和传感器系统等要素,以提供合适的力学支持和动作控制。
通过综合考虑这些因素,可以设计出性能优异、舒适可靠的下肢外骨骼机器人,为行动不便的人群提供有效的康复支持。
主被动结合式全身外骨骼助力机器人

成本较高
目前全身外骨骼助力机器人的研 发和制造成本较高,限制了其广 泛应用和推广。
用户体验需要进一 步优化
虽然已经取得了一定的成果,但 还需要进一步优化用户体验,提 高用户的舒适度和满意度。
拓展应用领域
可以进一步拓展全身外骨骼助力 机器人在医疗、康复、助老助残 等领域的应用,提高其社会效益 和经济效益。
结果分析
通过对实验数据的分析,对比不同 设计参数、不同使用环境下的机器 人性能差异,找出优势与不足。
改进方向
根据实验结果的分析,提出针对性 的改进方向和建议,为后续的机器 人优化设计提供参考。
06
总结与展望
研究成果总结
高度集成
实现了全身外骨骼助力机器人的高度集成 ,提高了其便携性和可穿戴性。
适应性强
04
机器人软件设计
运动学建模与控制算法
运动学建模
通过建立准确的运动学模型,可以精确地描述机器人的位置、速度和加速度 等运动特性。
控制算法
采用先进的控制算法,如PID控制、模糊控制等,实现对机器人运动的精确控 制。
机器学习算法应用
特征提取
利用机器学习算法对机器人收集的数据进行特征提取,识别用户的意图和行为。
03
机器人硬件设计
机构设计
连杆机构
由刚性连杆组成,用于实现机 器人的运动模拟和助力。
关节设计
采用高精度舵机实现关节的精 确控制,同时保证机构的稳定
性。
轻量化设计
采用优化算法对机构进行轻量 化设计,减少机器人自重,提
高移动性能。
驱动器设计
电机驱动
采用无刷电机驱动,具有高效率、高转矩、高寿 命的特点。
意义
主被动结合式全身外骨骼助力机器人可以为老年人和残疾人 提供行走和负重的辅助,提高他们的自理能力和生活质量, 减轻社会负担。
下肢外骨骼助力系统设计及仿真优化分析开题报告

下肢外骨骼助力系统设计及仿真优化分析开题报告一、研究背景及意义随着人口老龄化的加剧和社会的发展,下肢外骨骼助力系统作为一种新型康复手段,逐渐受到了学术界和工业界的广泛关注。
下肢外骨骼助力系统可以为行动不便者提供助力,使他们能够更加自如地行动,提高生活质量。
同时,下肢外骨骼助力系统还可以为需要持续站立的工作人员提供支撑和助力,减轻劳动强度,提高工作效率。
目前,国内外已经出现了一些下肢外骨骼助力系统的设计和研究,但是仍然存在很多问题需要解决。
例如,现有的下肢外骨骼助力系统存在助力效果不稳定、使用不便等问题,需要进一步进行改进和优化。
因此,本研究旨在设计一种高效、稳定、易于使用的下肢外骨骼助力系统,并通过仿真优化分析,进一步提高系统的性能和稳定性。
二、研究内容和方法(一)研究内容1. 下肢外骨骼助力系统设计根据国内外现有的下肢外骨骼助力系统的优缺点,设计一种性能稳定、使用便捷、效率高的下肢外骨骼助力系统。
系统的主要部件包括:助力机构、传感器、控制器等。
2. 下肢外骨骼助力系统仿真优化分析通过建立下肢外骨骼助力系统的仿真模型,对助力、传感、控制等部件进行优化分析,提高系统的效率和稳定性。
具体包括:(1)建立下肢外骨骼助力系统的仿真模型,模拟系统的运动过程和助力过程。
(2)对仿真模型中涉及到的助力机构、传感器进行参数优化,提高系统的助力效果和稳定性。
(3)对仿真模型中的控制器进行设计和优化,提高系统的控制精度和响应速度。
(二)研究方法1. 文献资料法通过查阅相关文献、了解国内外下肢外骨骼助力系统的现状,以及各个部件的最新技术进展,为系统设计和优化提供依据。
2. 实验法对设计的下肢外骨骼助力系统进行实验测试,并通过实验数据对系统的性能进行评估和优化。
3. 数值仿真法利用MATLAB、ADAMS等仿真软件,建立系统的动力学模型,进行仿真优化分析,预测系统的性能。
三、研究计划阶段研究内容工作计划第一阶段:文献综述1. 国内外下肢外骨骼助力系统的发展和应用 6周2. 下肢外骨骼助力系统的助力机构、传感器和控制器的设计技术与方法 5周第二阶段:系统设计1. 下肢外骨骼助力系统的整体设计 6周2. 助力机构、传感器、控制器的设计与搭建 8周第三阶段:系统仿真与优化1. 下肢外骨骼助力系统的动力学模型建立 6周2. 基于仿真模型的系统优化分析与设计 8周第四阶段:系统实验与性能评估1. 下肢外骨骼助力系统的实验系统搭建 6周2. 实验评估系统的助力效果和稳定性 10周第五阶段:论文撰写与答辩1. 论文撰写 10周2. 答辩 2周四、预期研究成果通过本研究,预期实现以下成果:1. 设计一种高效、稳定、易于使用的下肢外骨骼助力系统;2. 建立下肢外骨骼助力系统的仿真模型,优化系统的各部件参数,提高系统的助力效果和稳定性;3. 进行实验评估,验证系统的助力效果和稳定性;4. 发表研究论文一篇,申请专利一项,为下肢外骨骼助力系统的设计和研究提供参考。
下肢外骨骼机器人结构设计和动力学仿真_杨宗林
下肢外骨骼机器人结构设计和动力学仿真杨宗林,曾亿山,王善杰(合肥工业大学机械与汽车工程学院,安徽合肥230009)来稿日期:2015-07-09作者简介:杨宗林,(1991-),女,安徽六安人,硕士研究生,主要研究方向:机器人。
1引言随着现代军事的发展和对单兵作战能力要求的提高,步兵正在按照机动力、防护力、进攻力和信息力分别提高的路径发展,单个士兵所携带的装置也日趋复杂、沉重[2]。
外骨骼机器人是一种并联在人体上机电一体化装置,随人体一起运动[3],能够提供助力,减少人体疲劳。
目前国内外的外骨骼机器人驱动方式主要有液压、气动、电动三中常用方式[4]。
液压驱动系统虽然体积小、推力大,但可靠性差、维护麻烦[5]。
气动驱动系统推力偏小,不能实现精确的中间位置调节[6]。
本设计将采用电缸驱动的方式,其主要优点有:精确度高,调速方便,噪音小等。
通过对下肢外骨骼机器人(EXO-P )结构的设计和动力学仿真,可以为电缸的选型以及控制提供依据。
为了做出一种能够快速响应的外骨骼机器人,EXO-P 选用伺服电缸的方式。
但是仿人步态规划建模和动力学仿真是个问题。
现国内外的外骨骼机器人(像美国加州大学伯克利分校的BLEEX 系统[7],中科院的外骨骼机器人)在结构设计阶段的动力学仿真所用的运动轨迹,是将机构简化计算出来的。
这种方法太过理论化,没有实际应用意义。
为此,EXO-P 采用了NDI 三维动态测量方法。
进行仿人步态规划建模,在此基础上,对规划的步态进行动力学仿真,并得到了结果,切实解决了伺服电缸选型的实际问题。
2结构设计2.1自由度的分配在人体骨骼系统研究的基础上,设计出可穿戴外骨骼机器人的自由度分配,如图1所示。
其中,髋关节和踝关节具有屈曲/伸展、转动和外展/内收三个自由度,膝关节具有屈/伸自由度,脚踝有屈曲/伸展,屈曲/伸展两自由度。
脚底为橡胶,可弯曲。
摘要:为增加单兵作战能力,以人为核心,同时具有机械的高负载能力、耐力、长时间运动能力,设计出一款结合人工智能与机械的助力机器人。
基于虚拟样机技术的外骨骼助力搬运机器人结构设计与仿真研究

基于虚拟样机技术的外骨骼助力搬运机器人结构设计与仿真研究高坤;刘会霞;陈树洋;王霄【摘要】Aiming at the problem of existing exoskeleton assisted handling robot structure complex,expensive the exoskeleton robot was stud-ied for the structural design,kinematics and control simulation of the robot's virtual prototype technology. A relatively simple structure was designed to help the human body by bending over and carrying heavy objects,and the elbow joint was designed for self-locking mechanism. The D-H coordinates were established through kinematics model of the exoskeleton. The direct and inverse kinematics analysis was carried out. Based on the virtual prototype technology,the experimental data collected during the human gait walk,the simulation analysis and co-simulate of the gait movement were carried out. The results indicate that the designing of the robot's gait simulation is consistent with the actu-al data of the human body,and proves the stability and reliability of the designed structure.%针对现有外骨骼助力搬运机器人结构复杂、价格昂贵的问题,对外骨骼助力搬运机器人虚拟样机技术的结构设计、运动学与控制仿真展开了研究.设计了一款结构相对简单,在人体弯腰搬运重物时对人体腰部提供助力,且肘关节设计为自锁机构的可穿戴全身外骨骼助力搬运机器人;通过对外骨骼下肢运动学模型建立了D-H坐标,进行了正逆运动学分析;利用虚拟样机技术,采用人体步态行走时所采集的实验数据,对外骨骼助力搬运机器人进行了步态运动的仿真分析与联合控制仿真.研究结果表明:所设计的外骨骼助力搬运机器人的步态仿真运动与人体的实际数据相符,验证了所设计结构的稳定性与可靠性.【期刊名称】《机电工程》【年(卷),期】2018(035)004【总页数】6页(P391-396)【关键词】搬运机器人;结构设计;运动学;步态仿真【作者】高坤;刘会霞;陈树洋;王霄【作者单位】江苏大学机械工程学院,江苏镇江212013;江苏大学机械工程学院,江苏镇江212013;江苏大学机械工程学院,江苏镇江212013;江苏大学机械工程学院,江苏镇江212013【正文语种】中文【中图分类】TH39;TP240 引言由于外骨骼搬运机器人可以穿戴在人体上[1],且对不同的工作环境具有较好的适应性,被认为是一种较好的辅助人体完成体力工作的器械。
外骨骼型下肢康复机器人结构设计与动力学分析_史小华

技术指标 20~100 –90~20 –20~60 100~150 0~110 50~1 000 0~100
, 德 国 的 LokoHelp
[7]
[5]
、美国的
Litegait 和 Robomedica 。 这类康复训练机器人一 般包括步行矫正器、体重支撑系统(悬挂装置)和步 行台,主要用于患者中期和后期的步态康复训练, 具有较好的医疗效果。但患者躯干被束缚悬挂,上 体活动受限,舒适性差,且价格昂贵。另一类是穿 戴式康复机器人。代表性的有日本筑波大学研制的 Robot Suit HAL 、美国 Berkeley Bionics 公司研制 [9] 的 eLEGS 、 新 西 兰 Rex Bionics 公 司 研 制 的 REX
Design and Dynamic Analysis of an Exoskeletal Lower Limbs Rehabilitation Robot
SHI Xiaohua1 WANG Hongbo1, 2 SUN Li 2 GAO Feng 3 XU Zhen 1
(1. Hebei Provincial Key Laboratory of Parallel Robot and Mechatronic System, Yanshan University, Qinhuangdao 066004; 2. Key Laboratory of Advanced Forging & Stamping Technology and Science of Ministry of Education, Yanshan University, Qinhuangdao 066004; 3. School of Mechanical Engineering, Shanghai Jiaotong University, Shanghai 200240)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
b a s i s , k i n e ma t i c s s i mu l a t i o n o f t h e me c h a n i c a l s t r u c t u r e wi l l b e c a r r i e d t h r o u g h f u r t h e r , t h r o u g h t h e a n a l y s i s o f j o i n t t o r q u e ,
i t wa s pr ov e d t h a t t he r at i o na l i t y of t he s t r uc t u r e d e s i gn a nd dr i v e de s i gn . Ke y wo r d s:e x os ke l e t o n, me c ha ni c a l f r a me wor k, dy na mi c s i m ul a t i o n
( S c h o o l o f Me c h a n i c a l En g i n e e r i n g, Be i j i n g I n s t i t u t e o f Te c h n o l o0 8 1 , Ch i n a )
t u r e an d hu ma n mo v e me nt me c ha ni s m . Co ns i d e r i ng o t h e r a s pe c t s l i ke e l e c t r i c c o nt r ol , d r i ve a nd we i ght r e d uc t i on a n d S O o n,
GA( )Yu h e 。 ZHANG Hu 。 S ONG Qi u z h i S t r u c t u r e De s i g n a nd Dy n a mi c S i mu l a t i o n o f t h e Lo we r Ex t r e mi t y Ex o s ke l e t o n
opt i mi z a t i o n de s i g n o f t he me c h an i c a l s t r uc t ur e wa s ma de, t he n t he t hr e e — di me ns i o na l m od e l of i t c ou l d be a c qu i r e d. On t hi s
随 着 现 代 军 事 装 备 的革 新 和 单 兵 作 战 能 力 要 求
设 计 计 算
试 验 研 究
外 骨 骼 助 力 机 器人 结构 设 计 及动 力 学仿 真
高羽罱 , 张 虎 , 宋道 志
( 北京理2 r _ 大 学 机械 与车辆学院, 北京 1 0 0 0 8 1 )
摘 要 : 采 用人 机 合 一 的 下肢 外 骨 骼 助 力 装 置 , 是 未 来单 兵提 高携 行 、 机 动 能 力的 先进 方 式 ; 而 智 能 化 的助 力机械 结构 设计 与合 理 的驱动 选择 布置 , 是 确 保 外 骨 骼 助 力 机 器 人 可 靠 工 作 的 关 键 。 本 文 通 过 对 人体 结 构与人 体行 走运 动机 理 的分析 , 进行 外 骨骼机 械 结构 的初 步设 计 , 并 从 电控 、 驱 动 及 结 构 减 重 等 方
面进 行考 虑 , 对 外 骨骼机械 结构进 行优 化设 计 , 并获得 三 维模 型 。在 此基 础 之 上 , 进 一 步就机 械 结 构 的运 动 学仿真 , 通过 对各 关 节的 力矩分 析 , 验 证 结构设 计及 驱动 布 置的合 理性 。
关键词 : 外 骨骼 ; 机械 结构 ; 运 动 仿 真 中图分 类号 : T J 8 1 9 文 献标 志码 : A
Ab s t r a c t :The l ow e r l i mb e x os ke l e t o n s upp or t i ng i n t e l l i g e nc e s ys t e ms c an be us e d t o e f f e c t i v e l y i m pr o ve t he c ar r yi ng an d mo vi n g a bi l i t y of t he s ol di e r s i n t he f ut ur e, i t i s t he k e y t e c h ni que s of t he s upp or t i ng i nt e l l i ge n c e me c h a ni s m de s i g n a nd i n t h i s p a pe r , t h e pr e l i mi n a r y de s i g n o f he l owe r e x t r e mi t y e x os k e l e t o n was c a r r i e d o n by a na l ys i s o f t he hu ma n b ody s t r uc —