三维截图
一款简单实用的三维建模软件:Moi3D
技术与应用tougao1@108中国信息技术教育一款简单实用的三维建模软件:Moi3D盘俊春 广西南宁市第八中学实用教学软件兵器谱立体几何是学生比较害怕的知识,主要是内容太抽象,教师也不太好讲解。
像三视图这个知识点,几乎每年高考都会考到,很多学生明知高考必考,也在考前练了很多题,可是高考还是拿不到分。
如果教师在教学中能够利用计算机模拟制作出三维立体图给学生观察,学生就能很轻松地掌握这部分知识了。
三维作图常用软件有3DMax等,但这些软件功能复杂,用户主要是一些专业的CAD 设计人员,而教师只是要求制作一些简单的几何体就可以了,所以并不需要用这些复杂的三维制作软件。
那么有哪些软件比较简单易用呢?前面曾介绍过的Cabr i 3D就很不错,这里再介绍另一款比较好用的三维建模软件:Moi3D。
● Moi3D的主要功能及特点Moi3D是一款来自国外的三维建模类软件,该软件采用多元化的操作方式,支持多个功能视图界面,可以实现常见物体的三维建模以及编辑修改。
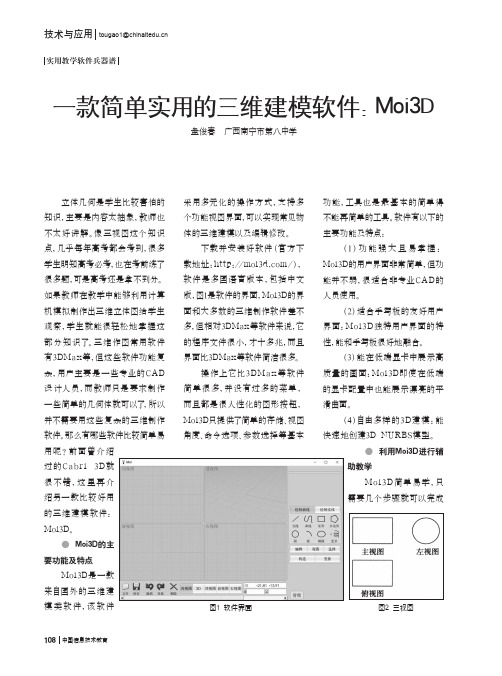
下载并安装好软件(官方下载地址:/),软件是多国语言版本,包括中文版,图1是软件的界面,Moi3D的界面和大多数的三维制作软件差不多,但相对3DMax等软件来说,它的程序文件很小,才十多兆,而且界面比3DMax等软件简洁很多。
操作上它比3DM a x等软件简单很多,并没有过多的菜单,而且都是很人性化的图形按钮,Moi3D只提供了简单的存储、视图角度、命令选项、参数选择等基本功能,工具也是最基本的简单得不能再简单的工具。
软件有以下的主要功能及特点:(1)功能强大且易掌握:Moi3D的用户界面非常简单,但功能并不弱,很适合非专业CAD的人员使用。
(2)适合手写板的友好用户界面:Moi3D独特用户界面的特性,能和手写板很好地融合。
(3)能在低端显卡中展示高质量的画面:Moi3D即使在低端的显卡配置中也能展示漂亮的平滑曲面。
(4)自由多样的3D建模:能快速地创建3D NURBS模型。
三维数据生产的几个级别介绍
圆明园 | 伟景行@2010
超精细模型
圆明园 | 伟景行@2010
超精细模型
圆明园 | 伟景行@2010
注意:超精细模型的使用范围主要是 名胜古迹、文物、博物复原等工作, 价格一般在10万每平方公里以上,不 推荐大量制作。
LOD4
精细模型
精细模型 精细模型 精细模型 精细模型 精细模型
数据
LOD 1(即体块模型)
ቤተ መጻሕፍቲ ባይዱ据
LOD 2(即简单粗模)
数据
实景照片
LOD 3(即标准模型)
三维建模
3DGIS平台
数据整合
数据整合
以下都是正常公路三维 数据生产建库截图参考
数据
LOD 4(即超精细模型)
超精细模型
三维数据的生产的四个级别
数据
模型类型 地形模型
建筑模型 交通设施模型 管线模型 植被模型 其他模型
CJJ/T 157-210国标
LOD2
DEM+DOM
基础模型 道路面 管线体 基础模型 基础模型
LOD1
DEM
体块模型 道路中心线 管线中心线 通用符号 通用符号
LOD3
高精度 DEM+高精度 DOM 标准模型 道路面+附属设施 管线体+附属设施 标准模型 标准模型
ps3d效果图制作教程
ps3d效果图制作教程3D效果图制作教程3D效果图是目前非常流行的一种制作方式,可以将平面图形以三维形式展现出来。
在现代设计领域和建筑行业中,3D效果图被广泛应用于建筑设计、室内装饰、景观规划等方面。
下面是一份关于如何制作3D效果图的简要教程,帮助初学者掌握基本的操作技巧。
一、准备工作在开始制作3D效果图之前,我们需要准备好以下的工具和素材:1. 一台电脑:3D效果图制作通常需要使用专业的图像处理软件,如3ds Max、Maya等,因此需要一台配置良好的电脑。
2. 3D建模软件:在进行3D效果图制作之前,我们需要使用3D建模软件来创建模型。
3ds Max是一款非常流行的3D建模软件,它提供了丰富的建模工具和功能。
3. 素材:为了制作3D效果图,我们需要收集一些相关的素材,如建筑图纸、材质贴图、灯光效果等。
这些素材将有助于我们更加真实地呈现出3D效果。
二、建模在制作3D效果图之前,我们首先需要进行建模操作,将平面图形转换为三维模型。
下面是一些基本的建模技巧:1. 导入平面图形:在3D建模软件中,导入平面图形,并根据其尺寸进行缩放和调整。
2. 创建基本几何体:使用3D建模软件提供的基本几何体工具,如盒子、柱体、球体等,创建三维模型的基本形状。
3. 细节建模:在创建基本形状之后,我们可以使用细分、拉伸、堆积等工具,进一步细化模型的细节。
4. 材质贴图:根据实际需求,为模型添加合适的材质贴图,以增加真实感。
三、布光和渲染完成模型建立后,我们需要进行布光和渲染操作,以增加3D效果图的逼真程度。
1. 创建灯光:使用3D建模软件中提供的灯光工具,在场景中添加适当数量和类型的灯光,如点光源、聚光灯等,以实现适当的光照效果。
2. 设置材质:根据实际需求,为每个模型添加适当的材质,并调整材质的属性,如光滑度、反射率等。
3. 调整相机:选择合适的视角,并调整相机参数,如焦距、光圈等,以获得理想的透视效果。
4. 渲染:在完成布光和设置材质后,我们可以开始渲染3D效果图。
第3章设计与制作三维创意作品3.4构建三维动画模型 -《信息技术人工-三维设计与创意》(教案)

通过本节课的学习,希望大家能够掌握多边形建模的基本技巧,并能够灵活运用这些技巧来解决实际建模问题。
基本原理:
空间中两个点确定一条直线。
三个不共线点确定一个三角面。
点、线、面组成三维空间,形成模型。
建模过程:
刻画大体轮廓:
类似于绘制人物素描,先绘制基本轮廓。
添加细节:
在轮廓基础上加点和线,逐步构建模型细节。
案例:
从立方体开始,构建鳐鱼模型。
优点与局限:
高效、细节丰富、形体闭合。
无法完全精确,近似效果,处理大量多边形可能影响性能。
网络资源:提供在线资源的链接,如教学论坛、视频教程和官方文档,以便学生在课后能够自主学习和深入研究。
交互式教学工具:使用交互式白板或教学应用程序,促进课堂互动,例如实时答疑、学生作品展示等。
打印材料:准备一些打印的参考材料,包括建模指导书、案例分析等,供学生在课后复习和参考。
教学过程
教学环节
教师活动设计
学生互动与参与:
课堂上,我鼓励学生提问并主动解答,增强了学生的参与感。
我还设置了小组讨论环节,让学生分组讨论多边形建模的技术细节,这促进了学生之间的互动和深入理解。
教学方法与效果:
通过结合传统板书和现代数字工具,我能够更有效地传达复杂的三维建模概念。
使用实际的软件操作演示,使学生能够看到即时的结果,加深了他们对操作流程的记忆。
总体来说,本次课程达到了预期的教学目标,学生对多边形建模有了清晰的理解,并能够初步应用这一技术。我将继续改进教学方法,增加实操环节,帮助学生更好地掌握三维建模技能。
100幅_三维立体画(PDF版)
收藏了一些三维图片,与同趣者分享(共76)
一个六角星
一个人在游泳
戒指
(从图片外侧看,田螺)
一朵红花
一箭穿心,是个粉色的大心
一张中国地图
海豚穿圈
比较简单没什么只是把图立体了
美人鱼
一个帆船(样子像)
一朵菊花
一朵花
一条类似草绳打打结的样子
立体的雪松
三个吕字型的东西
两朵花
螺旋桨
一条鱼
两条鱼
数字:2003
数字:99还有澳门的标志还有
一朵花
感觉是抽象派的类似削苹果不断的苹果皮
两只恐龙
3个箭头
福倒
一片树叶
一个女人化口红
一朵花
电脑
一个锤子
一个纸飞机
一个骷髅头
春
一个各个面有洞的中空正方体
斧子劈柴
2个辣椒
2个突起的尖的
一只袋鼠。
三维全景照片拍摄与制作教程
三维全景拍摄与制作教程如果你想用一个特殊的照相机一次拍一张全景照片,那么这里的文章对你都没什么用。
因为用那种特殊的相机,你能很方便地得到它。
如果你没有一个特制的照相机,而又需要拍一系列照片,再把它串起来,如果你读了本文以后会觉得这真的很简单……全景拍摄步骤指南如果你是第一次接触全景摄影,可能会以为全景技术是一个很复杂的东西,其实不是的;相反很简单。
你是否专业摄影师或业余爱好者,还是只想玩玩,立刻打印这页,带上你的照相机跑出去,遵照这个指南,你很快就可以拥有你第一张全景照片拉!如何选择全景拍摄的装备你可以买任意一种相机来生来成全景照片。
你并不需要别的任何设备,但你可能很快发现如果你手持普通相机的话真的不能拍出高质量的全景照片来。
下面列出的规则有助于你更容易拍出更好的照片。
全景拍摄技巧在你开始拍照之前,确信你的位置正确,那你就可以把东西都安装好。
如果你有个全景头, 注意正确使用,下面我们来学习全景拍摄时注意的问题,包括摄影点的选择和三角架的使用技巧。
全景拍摄三难题在进行的实际拍摄后,我们需要经常面临的问题就是需要计算拍摄的照片张数?自动调焦还是手动调焦?光线条件有多困难。
处理好以上三个问题才能够获得最后的成功。
拼接的窍门大多数拼接软件都非常直观,不过要生成更好的全景照片还是有一些重要的小窍门的。
全景图象编辑如果你想给你做好的全景照片增加一些文字说明或其他文本、图象或logos ,你只要用个图象编辑器,但是用SkyPaint这样的软件更为容易。
全景照片润色完美的拼接是难的,所以,一个小小的图象编辑器可以去掉不好的地方,得到一张真正的好照片。
生成球型全景图球面全景照正越来越受VR摄影者的欢迎(无论业余的还是专业的),因为做这个更有挑战性。
IPIX可能让你相信有些特别的东西可以垂直上下地看,也要让你确信只有他们的技术可以做到这点。
其实不是这样的。
不过,要作成球面全景照片可供选择的还真是不多。
打印全景照片有些人可能想把全景照片打印出来,而不是只在屏幕上看看。
塔吊安装PPT(内附带三维模型安装截图)
节之间连接
节之间连接
小车安装放大
• 3、组合吊臂拉杆,用销轴连接后搁置在吊臂上弦杆上的拉杆护架上。
• 4、检查吊臂上的电路是否完善,并穿绕小车牵引钢丝绳。先不穿绕 起升钢丝绳。
• 5、将吊臂总成平稳吊起,将吊臂与上转台用销轴连接(吊装中必须保 持吊臂水平以利安装)。
• 6、吊臂连接完毕后,继续提升吊臂使吊臂头部稍微抬起。
连接位置放大
• 四、在地面上将塔顶与平衡臂拉杆的第一节用销轴连好
第一节平衡臂拉杆
• 然后吊起用4个Φ50销轴与上转台相连。(安装塔顶时要 注意塔顶的前后方向。)
塔顶与回转塔身连接
• 五 在地面上拼装好平衡臂,并将卷扬机构、配电箱等安 装在平衡臂上,接好各部分电线
• 六 然后将平衡臂吊起与上转台用销轴固定,再将平衡臂吊起一定角度装好平 衡拉杆,放平后吊车摘钩。
销轴重新插入上一个踏步
刚好有能装入一个 标准节的空间
全部伸出油缸
9.用人力把引入梁框架上的标准节引致塔身的正上方,对准 标准节连接牢固,螺栓的预紧力为2.5KN.m.
把标准节引入
标准节对准
引进轮
螺栓连接牢靠 预紧力为2.5KN.m
10.卸下引进轮,缩回油缸 卸下引进轮
11.将下支座与塔身连接牢靠。(注意,缩油缸时卡板不能顶在 踏步上。)即完成一节标准节的加节工作。其余的加节工作, 重复以上的加节操作即可。
安装步骤
• 一 (1)先将三节标准节用16套M30高强螺栓连成一体
上下对准用螺栓连接 上下对准用螺栓连接
标准节螺栓连接处
• (2)然后吊装在固定基础上,并用8套M30高强 螺栓固定。(安装时要注意踏步的一面要垂直于 建筑物。)
标准节螺栓连接处
三维全景建模拍摄技巧

三维全景建模拍摄技巧三维全景建模是一种将三维场景转化为全景图像的技术,它可以提供更加真实、沉浸式的视觉体验。
在拍摄三维全景图像时,有一些技巧可以帮助我们获得更好的效果。
选择合适的设备是十分重要的。
一般来说,全景相机是拍摄三维全景图像的最佳选择。
全景相机具有特殊的镜头和传感器,可以捕捉到更多的细节和广阔的视野。
此外,还可以使用智能手机搭配全景拍摄的应用程序进行拍摄,但相比之下效果可能会稍差一些。
合理选择拍摄地点也是关键。
拍摄三维全景图像时,要选择宽阔、景色优美的地方。
比如海边、山顶、城市的高楼等地方都是不错的选择。
同时,要注意避免拍摄时出现杂乱的背景,这会影响观看者的体验。
拍摄角度也非常重要。
要尽量选择一个合适的角度,以展现整个场景的美感和独特之处。
可以尝试不同的角度和高度,找到最佳的拍摄角度。
此外,还可以尝试使用特殊的拍摄角度,比如鸟瞰视角或低角度拍摄,以增加场景的层次感和视觉冲击力。
在拍摄过程中,要注意保持相机的稳定性。
拍摄三维全景图像时,往往需要进行较长时间的曝光,因此相机的稳定性非常重要。
可以使用三脚架或稳定器来固定相机,以保证图像的清晰度和稳定性。
光线的控制也是十分关键的。
在拍摄三维全景图像时,要注意光线的亮度和方向。
可以选择在早晨或傍晚等光线柔和的时候进行拍摄,这样可以获得更加柔和的光线效果。
同时,还可以尝试使用反光板或灯光等辅助器材来调整光线的方向和强度,以获得更好的拍摄效果。
后期处理也是十分重要的一步。
在拍摄三维全景图像后,可以使用专业的图像处理软件进行后期修饰。
可以调整图像的饱和度、对比度和色彩平衡,以增强图像的视觉效果。
同时,还可以进行局部的修复和修剪,以去除不需要的元素和瑕疵。
总结起来,拍摄三维全景图像需要选择合适的设备,合理选择拍摄地点和角度,保持相机的稳定性,控制光线的亮度和方向,并进行后期处理。
通过掌握这些技巧,我们可以拍摄出更加真实、沉浸式的三维全景图像,为观看者带来更好的视觉体验。
三维城市建模
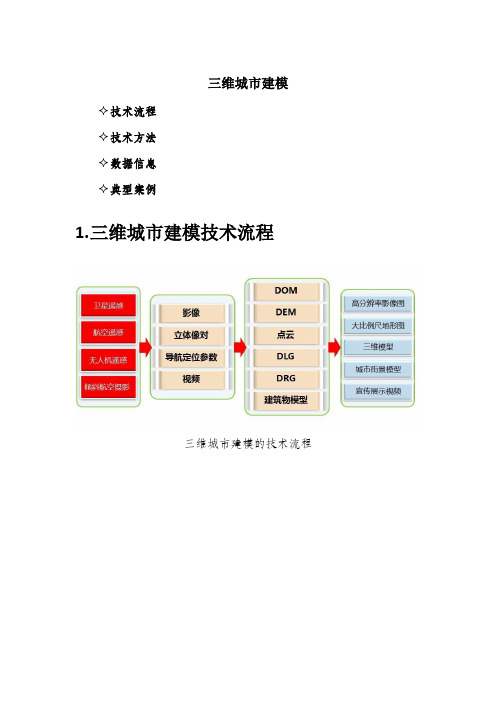
三维城市建模✧技术流程✧技术方法✧数据信息✧典型案例1.三维城市建模技术流程三维城市建模的技术流程2.三维城市模型的数据与信息三维城市模型的信息来源三维城市模型的数据与信息三维城市模型的4D产品三维城市信息编辑与管理三维场景地形点云与建筑物模型根据航拍影像自动提取建筑物模型航拍的城市像片自动或半自动提取的建筑物模型自动或半自动提取的建筑物模型自动或半自动提取的建筑物模型倾斜摄影测量方法建立的城市街景3.主要技术方法3.1 卫星遥感遥感技术是从人造卫星、飞机或其他飞行器上收集地物目标的电磁辐射信息,判认地球环境和资源的技术。
目前利用人造卫星每隔18天就可送回一套全球的图像资料。
利用遥感技术,可以高速度、高质量地测绘地图。
3.2 航空遥感航空遥感从19世纪末非动力飞行平台的航空摄影、经过20世纪30年代至80年代初的胶片航空摄影,发展到目前的基于POS系统(Positioning Orientation System)对地定位的光学/数字、激光手段,无论在飞行平台,还是在成像、导航、定位定向等传感器上都发生了巨大的变化,使航空遥感技术朝着高空间分辨率、高光谱分辨率、全谱段和多传感器集成应用方向发展,呈现出蓬勃的生机。
1. 胶片航空摄影航空摄影作为遥感信息获取的重要手段之一,由于具有机动灵活、高空间分辨率、成像机理简明、易于进行图象处理、信息提取、信息综合等特点,被广泛应用于农业、林业、交通、国防、城乡规划、制图等领域。
航空摄影技术的发展最早可追朔到1839年人类利用“摄影术”成功获取的第一张像片。
二十世纪初,由于航空航天技术的发展,航空摄影开始兴起。
早期的航摄仪以手持式为主。
二十世纪五十年代,带坐架和导航设备的航摄相机开始问世并投入生产作业,其典型的代表有:RMK、RC8、AφA等。
受技术所限,其像幅均为18×18cm,色差消除多限制在可见光范围内,物镜畸变差较大(大于10um)。
七、八十年代,推出了新一代航摄仪RC10、RC20、RMK A、MRB、LMK,像幅扩大到23×23cm,色差消除范围达400-900nm,物镜畸变差均小于7um,并具有影像位移补偿功能。
三维图像获取装置以及生成深度图像的方法

三维图像获取装置以及生成深度图像的方法传统的三维图像获取装置主要包括摄像机、激光雷达、深度摄像头等设备。
然而,随着科技的发展,人们对于三维空间的模拟和测量需求日益增加,对于三维图像获取技术也提出了更高的要求。
近年来,基于光学原理的三维图像获取装置以及生成深度图像的方法逐渐成为研究的热点。
本文将介绍一种新型的三维图像获取装置以及生成深度图像的方法,并对其优缺点进行分析和讨论。
1. 引言随着计算机视觉技术的快速发展,三维图像获取装置和生成深度图像的方法成为了研究的热点之一。
传统的三维图像获取装置存在一些问题,如成本高、体积大、不易移动等。
因此,研究人员提出了一种基于光学原理的新型装置,旨在解决传统装置的缺点,并提高三维图像获取的效果。
2. 新型三维图像获取装置的原理新型三维图像获取装置主要基于光学原理,利用光的折射、反射和散射等特性进行测量和模拟。
该装置包括两个主要部分:发射部分和接收部分。
发射部分包括激光器和光纤,用于产生和传输光信号。
接收部分包括相机和传感器,用于接收并记录光信号。
3. 新型三维图像获取装置的优点相比传统的三维图像获取装置,新型装置具有以下几个优点:1) 成本更低:新型装置采用了光纤和相机等较为常见的设备,相比传统装置的昂贵和复杂的成本更低。
2) 体积更小:光纤和相机等设备体积较小,新型装置整体体积更小,便于携带和移动。
3) 精度更高:基于光学原理,新型装置具有更高的精度,能够获取更详细、更准确的三维图像。
4) 实时性更好:新型装置可以实时获取图像数据,并根据实际需求进行处理和分析。
4. 生成深度图像的方法除了三维图像的获取,生成深度图像也是三维图像处理的重要环节。
本文提出了一种基于新型装置生成深度图像的方法,具体步骤如下:1) 利用新型装置获取三维图像数据;2) 对获取的三维图像数据进行处理和分析,提取出目标物体的边界和轮廓信息;3) 根据相机和激光器的参数,计算出目标物体的深度值;4) 将深度值转换为灰度值,生成深度图像。
用Voxler做三维切片图

用Voxler做三维切片图
目前在地质工作中有时会涉及到三维切片图件的制作,Voxler 软
件操作简单快捷。
本人以制作不同深度电阻率的三维切片图为例,将其在这方面的简单应用分享给大家,希望得到大家的批评指正。
1、数据的准备
数据格式为四列(即X、Y、Z 和数据列),数据之间用特定分隔
符区分,也可用固定长度区分,可参照实例(sample.dat)。
2、打开Voxler 进行数据添加运行FLE——LOAD DATA,将1 中整理好的数据导入工作区
3、将数据进行插值
运行
Create——Computational——Gridder,在Network 工作
区添加Gridder 模型,并与刚刚导入的数据连接。
在Gridder 模型的属性窗口中选择合适的差之方法,调整
相应的参数后运行Begin Gridding。
此时网格化的数据已存储与Gridder 模型中。
4、三维切片成图
(1)在Network 工作区中添加三个Ortholmage 模型,并与
Gridder 模型相连,分别将Orientation 属性设置为XYPlane、
XZPlane、YZPlane。
(2)在ColorMap属性中设置适合的颜色等级。
添加BoundingBox 模型并与Gridder 模型相连。
通过调整切片属性(Slice Nunber),
即可显示不同位置的切片等值线图。
(3)根据个人需要进行简单调整修饰后进行保存和输出。
图形学读取立方体、兔子、八字三维模型代码及截图
#include <stdlib.h>#include <GL/glut.h>#include <stdio.h>#include <iostream>#include <string>#include <fstream>#include <sstream>#include<cmath>using namespace std;int v_num = 0; //记录点的数量int f_num = 0; //记录面的数量int vn_num = 0;//记录法向量的数量int vt_num = 0;GLfloat **vArr; //存放点的二维数组int **fvArr; //存放面顶点的二维数组int **fnArr;//存放面法向量的二维数组int **ftArr;GLfloat **vtArr;GLfloat **vnArr;//存放法向量的二维数组string s1, s2, s3, s4;GLfloat f2, f3, f4;void getLineNum(string addrstr) //获取点和面的数量{ifstream infile(addrstr.c_str()); //打开指定文件string sline;//每一行int i = 0, j = 0;while (getline(infile, sline)) //从指定文件逐行读取{if (sline[0] == 'v'){if (sline[1] == 'n'){vn_num++;}else if(sline[1] == 't'){vt_num++;}else{v_num++;}}if (sline[0] == 'f'){f_num++;}}}int readfile(string addrstr) //将文件内容读到数组中去{//getLineNum(addrstr);//new二维数组vArr = new GLfloat*[v_num];for (int i = 0; i<v_num; i++){vArr[i] = new GLfloat[3];}vnArr = new GLfloat*[vn_num]; for (int i = 0; i<vn_num; i++) {vnArr[i] = new GLfloat[3]; }vtArr = new GLfloat*[vt_num]; for (int i = 0; i<vt_num; i++) {vtArr[i] = new GLfloat[2];}fvArr = new int*[f_num];fnArr = new int*[f_num];ftArr = new int*[f_num];for (int i = 0; i<f_num; i++){fvArr[i] = new int[3];fnArr[i] = new int[3];ftArr[i] = new int[2];}ifstream infile(addrstr.c_str()); string sline;//每一行int ii = 0, jj = 0, kk = 0, mm = 0;while (getline(infile, sline)){if (sline[0] == 'v'){if (sline[1] == 'n')//vn{istringstream sin(sline);sin >> s1 >> f2 >> f3 >> f4;vnArr[ii][0] = f2;vnArr[ii][1] = f3;vnArr[ii][2] = f4;ii++;}else if (sline[1] == 't'){istringstream sin(sline);sin >> s1 >> f2 >> f3 ;cout << f2 << f3;vtArr[mm][0] = f2;vtArr[mm][1] = f3;// vtArr[mm][2] = f4;mm++;}else//v{istringstream sin(sline);sin >> s1 >> f2 >> f3 >> f4;vArr[jj][0] = f2;vArr[jj][1] = f3;vArr[jj][2] = f4;jj++;}}if (sline[0] == 'f') //存储面{istringstream in(sline);GLfloat a;in >> s1;//去掉fint i, k;for (i = 0; i < 3; i++){in >> s1;cout << s1 << endl;//取出第一个顶点和法线索引a = 0;//int len = sizeof(s1);int len = s1.length();cout << len;for (int m = 0; m <len; m++){if (s1[m] != '/'){a = a * 10 + (s1[m] - 48);fvArr[kk][i] = a;}else{m++;if (m <=3){if (s1[m] != '/'){a = a * 10 + (s1[m] - 48);ftArr[kk][i] = a;}else{m++;a = a * 10 + (s1[m] - 48);fnArr[kk][i] = a;}}else{// m++;a = a * 10 + (s1[m] - 48);fnArr[kk][i] = a;}}}//for (k = 0; s1[k] != '/'; k++)// {//a = a * 10 + (s1[k] - 48);// }// fvArr[kk][i] = a;// a = 0;//for (k = k + 2; s1[k]; k++)// {// a = a * 10 + (s1[k] - 48);// }// fnArr[kk][i] = a;}kk++;}}return 0;}void init(void){getLineNum("Eight.obj");readfile("Eight.obj");GLfloat mat_specular[] = { 1.0, 1.0, 1.0, 1.0 };GLfloat mat_shininess[] = { 50.0 };//材料的镜面指数,其值越大越精细GLfloat light_position[] = { 1.0, 1.0f, 1.0, 0.0 };GLfloat white_light[] = { 1.0, 1.0, 1.0, 1.0 };GLfloat lmodel_ambient[] = { 0.1, 0.1, 0.1, 1.0 };glClearColor(0.0, 0.0, 0.0, 0.0);glShadeModel(GL_SMOOTH);glMaterialfv(GL_FRONT, GL_SPECULAR, mat_specular);glMaterialfv(GL_FRONT, GL_SHININESS, mat_shininess);glLightfv(GL_LIGHT0, GL_POSITION, light_position);//光源位置glLightfv(GL_LIGHT0, GL_DIFFUSE, white_light);//漫反射光源glLightfv(GL_LIGHT0, GL_SPECULAR, white_light);//镜面反射光源glLightModelfv(GL_LIGHT_MODEL_AMBIENT,lmodel_ambient);//环境光源glEnable(GL_LIGHTING);//启动光照glEnable(GL_LIGHT0);//启用0度光源glEnable(GL_DEPTH_TEST);//启动深度测试/*glShadeModel(GL_SMOOTH); //Enable Smooth ShadingglClearColor(0.0f, 0.0f, 0.0f, 0.5f); // 黑色背景glClearDepth(1.0f); // 深度缓冲区设置glEnable(GL_DEPTH_TEST); // 允许深度测试glDepthFunc(GL_LEQUAL); // 定义深度测试类型glHint(GL_PERSPECTIVE_CORRECTION_HINT, GL_NICEST); // Really Nice Perspective Calculation*/}void display(void){glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);//gluLookAt(-2.0, -2.0, -2.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0); //设置观察的位置glTranslatef(1.0, -0.0, -8.0);glScalef(0.1, 0.1, 0.1);for (int i = 0; i<f_num; i++){glPolygonMode(GL_FRONT_AND_BACK, GL_FILL);glBegin(GL_TRIANGLES);if (vn_num == 0){//glNormal3f(vnArr[fnArr[i][0] - 1][0], vnArr[fnArr[i][0] - 1][1], vnArr[fnArr[i][0] - 1][2]);glVertex3f(vArr[fvArr[i][0] - 1][0], vArr[fvArr[i][0] - 1][1], vArr[fvArr[i][0] - 1][2]);//glNormal3f(vnArr[fnArr[i][1] - 1][0], vnArr[fnArr[i][1] - 1][1], vnArr[fnArr[i][1] - 1][2]);glVertex3f(vArr[fvArr[i][1] - 1][0], vArr[fvArr[i][1] - 1][1], vArr[fvArr[i][1] - 1][2]);//glNormal3f(vnArr[fnArr[i][2] - 1][0], vnArr[fnArr[i][2] - 1][1], vnArr[fnArr[i][2] - 1][2]);glVertex3f(vArr[fvArr[i][2] - 1][0], vArr[fvArr[i][2] - 1][1], vArr[fvArr[i][2] - 1][2]);}else{glTexCoord2f(vtArr[ftArr[i][0] - 1][0], vtArr[ftArr[i][0] - 1][1]);// glNormal3f(vnArr[fnArr[i][0] - 1][0], vnArr[fnArr[i][0] - 1][1], vnArr[fnArr[i][0] - 1][2]);glVertex3f(vArr[fvArr[i][0] - 1][0], vArr[fvArr[i][0] - 1][1], vArr[fvArr[i][0] - 1][2]);glTexCoord2f(vtArr[ftArr[i][1] - 1][0], vtArr[ftArr[i][1] - 1][1]);// glNormal3f(vnArr[fnArr[i][1] - 1][0], vnArr[fnArr[i][1] - 1][1], vnArr[fnArr[i][1] - 1][2]);glVertex3f(vArr[fvArr[i][1] - 1][0], vArr[fvArr[i][1] - 1][1], vArr[fvArr[i][1] - 1][2]);glTexCoord2f(vtArr[ftArr[i][2] - 1][0], vtArr[ftArr[i][2] - 1][1]);// glNormal3f(vnArr[fnArr[i][2] - 1][0], vnArr[fnArr[i][2] - 1][1], vnArr[fnArr[i][2] - 1][2]);glVertex3f(vArr[fvArr[i][2] - 1][0], vArr[fvArr[i][2] - 1][1], vArr[fvArr[i][2] - 1][2]);}glEnd();}glFlush();//强制绘图}void reshape(int w, int h){glViewport(0, 0, (GLsizei)w, (GLsizei)h); //视口设置glMatrixMode(GL_PROJECTION);glLoadIdentity();if (w <= h)//描绘了两种不同情况下的平行修剪空间glOrtho(-1.5, 1.5, -1.5 * (GLfloat)h / (GLfloat)w, 1.5 * (GLfloat)h / (GLfloat)w, -10.0, 10.0);elseglOrtho(-1.5*(GLfloat)w / (GLfloat)h, 1.5*(GLfloat)w / (GLfloat)h, -1.5, 1.5, -10.0, 10.0);glMatrixMode(GL_MODELVIEW);glLoadIdentity();int main(int argc, char **argv){glutInit(&argc, argv);//对GLUT进行初始化glutInitDisplayMode(GLUT_SINGLE | GLUT_RGB | GLUT_DEPTH);//设置显示方式,单缓冲、RGB颜色glutInitWindowSize(500, 500);glutInitWindowPosition(100, 100);//glutCreateWindow(argv[0]);glutCreateWindow("Test");init();glutDisplayFunc(display);glutReshapeFunc(reshape);glutMainLoop();return 0;}◆cube.obj文件没有运用光照时输出的模型:①点:②边:③面:运用光照时输出的模型:①通过顶点法向量画出:②通过面的法向量画出:③画出面的法向量移动某个顶点:◆bunny.obj文件没有运用光照时输出的模型:①点:②边:③面:运用光照时输出的模型:①通过顶点法向量画出:②通过面的法向量画出:③画出面的法向量:◆Eight.obj文件没有运用光照时输出的模型:①点:②边:③面:运用光照时输出的模型:①通过顶点法向量画出:②通过面的法向量画出:③画出面的法向量:。
三维数组使用案例

三维数组使用案例三维数组是由多个二维数组组成的数据结构,它可以用来表示具有多个维度的数据。
在实际应用中,三维数组可以用来存储和处理各种类型的数据,例如图像处理、游戏开发、科学计算等领域。
下面列举了十个使用三维数组的案例。
1. 图像处理:三维数组可以用来存储图像的像素值,其中每个像素由红、绿、蓝三个分量组成。
通过对三维数组中的像素值进行操作,可以实现图像的旋转、缩放、滤波等处理。
2. 三维游戏地图:在游戏开发中,三维数组可以用来表示游戏地图,其中每个元素代表一个单元格的属性,比如地形、障碍物、道具等。
通过对三维数组进行遍历和修改,可以实现游戏地图的生成和编辑。
3. 天气模拟:三维数组可以用来存储气象数据,比如温度、湿度、风速等。
通过对三维数组进行计算和插值,可以模拟出不同地区的天气变化情况。
4. 分子动力学模拟:三维数组可以用来存储分子的坐标和速度信息。
通过对三维数组进行更新和计算,可以模拟分子在空间中的运动和相互作用。
5. 三维立体声音效:在音频处理中,三维数组可以用来存储立体声音频数据。
通过对三维数组中的音频数据进行处理,可以实现立体声音效的生成和播放。
6. 空间物体检测:在计算机视觉领域,三维数组可以用来存储空间中物体的位置和属性信息。
通过对三维数组进行分析和处理,可以实现物体的检测和识别。
7. 三维电影渲染:在电影制作中,三维数组可以用来存储场景的几何信息和材质属性。
通过对三维数组进行光线追踪和着色,可以生成逼真的三维电影效果。
8. 基因组分析:在生物信息学中,三维数组可以用来存储基因组的序列和结构信息。
通过对三维数组进行比对和分析,可以研究基因组的功能和演化。
9. 三维打印模型:在三维打印领域,三维数组可以用来表示打印模型的几何形状和材料属性。
通过对三维数组进行切片和转换,可以生成用于三维打印的模型文件。
10. 三维数据可视化:三维数组可以用来存储三维空间中的数据点和属性。
通过对三维数组进行可视化处理,可以展示数据的分布和关联关系。
智慧医疗绿色施工

公司名称北京市建筑设计研究院有限公司项目地址中国,北京应用软件Autodesk® Revit® ArchitectureAutodesk® Revit® StructureAutodesk® Revit® MEPAutodesk® Navisworks®AutoCAD® Civil 3D®Autodesk® InfraWorks®Autodesk® Simulation CFD首都医科大学附属北京天坛医院迁建工程设计周期仅仅1年时间,共计约36万平米的三级甲等医院,设计内容涵盖建筑、结构、设备、电气、室内设计、景观设计,在如此短的设计周期内,对BIM系统的充分利用,才能尽可能避免设计中的错误与冲突,BIM在本项目的充分应用对大型、超大型医疗建筑起着举足轻重的作用,流线复杂,管线设备众多以及更新换代频繁,只有通过BIM系统协调才能有效保证医疗建筑产品最终的质量,同时保证建设过程中的BIM系统有效的与施工方进行对接,不仅提高生产效率,还为医院使用方后期运营提供保障。
—张军徽BIM经理北京市建筑设计研究院有限公司图1-1 天坛医院西南鸟瞰效果图北京市建筑设计研究院有限公司(BIAD)成立于1949 年10 月,是与中华人民共和国同龄的大型国有民用建筑设计机构。
BIAD 自成立以来,在建筑设计及科研领域取得了突出的成绩,曾被北京市政府授予“首都建筑设计突出贡献设计研究单位称号”。
BIAD今共获得荣誉:詹天佑土木工程大奖 14项,国家级设计奖 61 项,建设部设计奖 281项,北京市设计奖 551 项,国家科技进步奖 28项,部级科技进步奖 84 项,北京科技进步奖147 项。
BIAD被北京市人民政府国有资产监督管理委员会定为北京市首批转企改制单位,2012 年6 月6 日,北京市建筑设计研究院正式更名为“北京市建筑设计研究院有限公司”。