使用自组织映射网络识别城市道路主要结构
智能网联技术题库--判断题

考试内容(题库)x V三、判断题1、智能汽车是在一般汽车上增加雷达和摄像头等先进传感器、控制器、执行器等装置。
(V)2、网联汽车是指基于通信互联建立车与车之间的连接,车与网络中心和智能交通系统等服务中心的连接。
(V )3、自动驾驶汽车是指汽车至少在某些具有关键安全性的控制功能方面(如转向、油门或制动)无须驾驶员直接操作即可自动完成控制动作的车辆。
(V )4、无人驾驶汽车是通过车载环境感知系统感知道路环境,自动规划和识别行车路线并控制车辆到达预定目标的智能汽车。
(V )5、智能网联汽车发展的终极目标是无人驾驶汽车。
( V )6、自动驾驶汽车至少包括自适应巡航控制系统、车道保持辅助系统、自动制动辅助系统、自动泊车辅助系统,比较高级的车型还应该配备交通拥堵辅助系统。
( V )7、我国把智能网联汽车智能化划分为4个等级,1级为驾驶辅助(DA), 2级为部分自动驾驶(PA),3级为有条件自动驾驶(CA),4级为高度自动驾驶(HA).(X )8、我国把智能网联汽车网联化划分为3个等级,1级为网联辅助信息交互;2级为网联协同感知,3级为网联协同决策与控制。
( V )9、对应美国SAE分级标准,无人驾驶专指L4 、L5阶段,汽车能够在限定环境乃至全部环境下完成全部的驾驶任务。
(V )10、智能汽车范围最广,具有L1〜L5以及其他应用于L0的智能辅助驾驶系统技术的汽车,都属于智能汽车。
(X )11、自动驾驶汽车是指具有L1〜L5,包括预警提示、短暂干预的辅助驾驶系统等技术的汽车。
(X )12、智能网联汽车是智能汽车与车联网交集的产品,是未来智能交通系统下车联网环境中发挥着重要作用的智能终端,最终实现车辆“安全、高效、舒适、节能”行驶的新一代多车辆系统。
(V )13、驾驶员对车辆控制权分为驾驶员拥有车辆全部控制权、驾驶员拥有车辆部分控制权、驾驶员不拥有车辆控制权3种形式。
(V )14、智能网联汽车“三横两纵”技术结构,三横包括基础支撑技术、信息交互关键技术和车辆/设施关键技术;两纵是指车载平台和基础设施。
浅谈城市道路交通监控系统的构成
浅谈城市道路交通监控系统的构成城市道路交通监控系统是一个由多个组件构成的综合系统,用于监控和管理城市道路上的交通状况。
其主要构成包括摄像头、视频监控设备、智能交通信号控制系统、数据处理与分析系统等多个部分。
摄像头是城市道路交通监控系统的基础组件。
摄像头可以通过安装在交通路口、隧道、桥梁等位置来实时监控道路上的交通情况。
摄像头可以拍摄到车辆的数量、类型、速度、行驶轨迹等信息,并将图像或视频传输至视频监控设备。
视频监控设备是对摄像头拍摄到的图像或视频进行监控和存储的设备。
视频监控设备通常由视频传输设备、视频存储设备和显示设备组成。
视频传输设备用于接收和传输来自摄像头的图像或视频信号,视频存储设备用于存储图像或视频数据,而显示设备则用于实时显示监控的图像或视频。
智能交通信号控制系统是城市道路交通监控系统中的重要组成部分。
通过交通信号控制系统,可以实现对交通信号灯的控制和调度,以提高交通效率和道路通行能力。
智能交通信号控制系统可以根据道路交通流量、车辆密度和行驶速度等信息,自动调节交通信号灯的时序和时长,以优化交通信号的配时。
数据处理与分析系统是对监控系统采集到的交通数据进行统计、分析和处理的关键环节。
该系统可以利用机器学习、图像识别、数据挖掘等技术对交通数据进行分析和预测,以评估道路交通状况、分析交通事故原因,并提供交通管制建议。
数据处理与分析系统还可以通过实时监控和数据分析,帮助交通管理部门调整交通策略和规划城市交通。
城市道路交通监控系统还可以包括云计算平台、移动应用程序和数据共享平台等其他组件。
云计算平台可以提供存储和计算资源,用于处理大量的交通数据。
移动应用程序可以让交通管理人员随时随地监控交通状况,并及时做出决策。
数据共享平台可以将交通数据和监控结果与其他相关部门共享,以提供更全面的交通信息和服务。
城市道路自动提取
高空间分辨率影像城市道路信息自动提取为了更好的对城市规划和各个探测领域提供更准确的道路信息,城市道路信息的提取成为显而易见的问题,怎么样才能提高城市道路信息提取的效率呢,这里主要研究采用半自动和自动化的高空间分辨率影像城市道路信息提取。
高空间分辨率遥感影像以其丰富的纹理等细节信息, 降低了目视解译难度的同时, 却提高了计算机处理的复杂性高空间分辫率遥感影像道路信息的提取, 尤其是城市道路信息的自动提取, 存在着许多困难本文通过面向对象的影像分割、道路信息与背景信息的闺值分离、道路骨架提取、霍夫变换提纯并矢量化等技术, 实现了高空间分辫率遥感影像城市道路信息的自动提取与识别。
城市道路包括市区各类道路, 包括全市性干道、高速公路、工业区道路和居住区道路, 而不包括广场和停车场用地以及街坊小区内部道路道路的位置、宽度等信息, 是城市地理信息系统中的重要信息, 而通过目视判读和手工勾绘方式费时费力, 因此采用人工智能方式利用计算机自动提取道路信息成为一个主要的发展方向。
随着遥感技术的发展, 特别是高分辨率遥感影像的出现, 遥感卫星影像作为数据源在测图和空间数据库更新中得到了越来越广泛的应用高空间分辨率遥感影像以其丰富的纹理等细节信息, 降低了目视解译难度的同时, 却提高了计算机处理的复杂性高空间分辨率遥感影像道路信息的提取, 尤其是城市道路信息的自动提取, 存在着许多困难现阶段, 高分辨率遥感影像城市道路提取方法尚不成熟, 本文针对这一问题进行了有益的探索。
道路特征自动提取, 包括道路特征的自动识别和几何特征的自动定位, 已发展出各种各样的提取方法, 其基本思路大致是将影像道路的提取分解成四个步骤道路影像的特征增强道路种子点的确定将种子点扩展成线段将线段确认并连接成道路网目前已经能够做到把道路影像从其他地物影像中分割出来甚至能区分道路类型已有的道路提取算法大多都针对不同的影像类别, 即航空影像或卫星遥感影像, 不同的比例尺影像分辨率, 不同区域的影像如城区、乡村或郊区和不同的道路类型, 如乡村路、街道、高速公路、高等级公路等。
交通网络布局及形式 城市路网结构分析 PPT

▪ 容易将过多的交通引入市中心,而外围路网容量得不 到充分
▪ 方向性差,不利于建筑物布置 ▪ 机动性较差
❖改进方法?
自由式道路网
❖ 自由式路网没有固定的形式,多呈不规则状 ❖ 代表城市:重庆、青岛
自由式道路网
自由式道路网
❖ 特点
▪ 常结合自然地形,呈现出不规则状、路网形式多变 ▪ 节省工程费用 ▪ 如果能有机的结合城市布局、建筑布置及城市园林绿
❖ 代表城市:北京、西安等城市的老城区
方格网状路网
方格网状路网
❖ 优点
▪ 布局严整、简洁,方向性,有利于建筑布置 ▪ 交通分布均匀 ▪ 交叉口组织较容易 ▪ 重新分配车流方面具有较大的灵活性
❖缺点
▪ 交叉口较多,对车流运行的连贯有影响 ▪ 非直线系数较大,对角线方向交通联系不便 ▪ 主次干道之间功能不易明确 ▪ 不利于过境交通分流,对城市扩展不利
城市道路功能结构
❖ 功能分级 ▪ 第一级(快速路、主干路)
承担出入境、过境和组团间的长距离、通过性极强、 机动化出行为 主;道路两侧严禁开口的道路
▪ 第二级(次干路)
通过性交通和集散性交通并重,道路两侧可少量开口,既达到一定程 度上的“通”,又满足一定程度上的“达”。
▪ 第三级(支路)
主要以到达和出入为服务目的,允许在道路两侧开口,短距离、集散 性极强的道路,同时满足非机动车形式需要。
化等因素,能取得很好的经济效果、交通效果、景观 效果
❖缺点
▪ 方向性差 ▪ 非直线系数大
混合式路网-方格环形放射式
❖ 混合式路网是根据地区的地形和交通需求将城市 不同区域的道路系统有机结合起来,是城市不同 分阶段发展的体现
混合式路网-方格环形放射式
智能交通系统中的车辆自组织网络技术
智能交通系统中的车辆自组织网络技术随着交通工具和城市规模的不断扩大,交通瓶颈也日益加剧,给交通系统带来了巨大的挑战。
为解决这一问题,智能交通系统应运而生。
智能交通系统是将先进的信息通信技术、计算机技术、控制技术等有机结合起来的综合性的交通运输管理系统,它可以提高交通系统的安全、效率和便捷性。
车辆自组织网络技术(VANET)是智能交通系统中的一项重要技术,可以支持车辆及其周围设备之间的通信,实现信息共享和智能路况预测,以减少交通堵塞和提高行车安全。
本文将阐述VANET技术的优点、应用、特点和挑战,并对VANET技术未来的发展做出了展望。
一、VANET技术的优点1. 提高交通安全性车辆之间可以共享交通信息,例如车速、位置和方向等,让车辆可以做出更明智的决策,从而避免事故的发生。
2. 缓解交通拥堵通过车辆之间的通信,可以在实时中自动调整车辆的速度、路线和距离,从而避免或减轻交通拥堵情况。
3. 提高驾驶效率VANET技术的应用可以为驾驶人员提供更全面、更准确的路况信息,让驾驶人员可以根据实时路况做出最佳的驾驶决策,提高驾驶的效率。
4. 降低车辆碳排放通过优化路况信息,让车辆的行驶支出更少的能量和时间,从而减少车辆排放。
车辆自组织网络技术对于车辆的准确定位和减少行驶热点地区的车流量都有很好的帮助。
二、VANET技术的应用1. 交通安全交通安全是VANET技术的主要应用领域之一。
将车辆之间的通信结合到交通安全系统中,可以在道路中设立警告灯、传输交通流量等信息,提醒驾驶员或机器在道路上进行注意和警惕,避免交通事故的发生。
2. 智能路况预测通过对道路信息、交通流量、天气状况等进行数据分析,实现智能路况预测。
展开预测模式,在出现交通拥堵或交通事故等情况时通过调整车辆速度,路线,或提醒驾驶员进行安全驾驶等方式缓解或避免道路拥堵。
3. 汽车智能连接通过车辆自组织网络技术,可以将交通系统与车辆连接起来,从而实现智能汽车连接。
城市道路网表示的最佳方法选取

城市道路网表示的最佳方法选取刘一臻(福建师范大学地理科学学院福建福州350007)摘要:城市道路是社会经济活动和人们生活的基础设施,对于城市道路网的表示也是城市快速建模中的重要环节。
本文对城市道路网进行分解,归纳出路网中的几类基本的道路类型,根据拓扑学下的图论理论,对归纳出的不同道路类型进行拓扑表示,最后根据时间复杂度和空间复杂度进行不同方法表示的优化对比,得出邻接表可以较高效的进行城市道路网的表示。
关键词:图论、城市道路网、算法复杂度城市道路网络是社会经济活动和人民生活的基础设施,也是支持交通运输的底层网络。
许多实证研究发现城市道网是复杂系统,展现了无标度、分形结构、自组织等性质[1]。
城市道路体系随时间的推演不断发展变化,很多城镇最初发展并没有完善的城市规划,而是随着经济发展和人口增加逐步扩大,城市的地理空间结构因此呈现复杂多样的形态特征[2]。
1 城市道路分析1.2 城市道路网类型城市路网结构具备一定的规律性,可以把错综复杂的现象归结为基本单元的组合[3]。
道路系统只有在内部相互联系的各要素间形成合理的稳定的组合形态(如总体形态、等级配置、排列方式、衔接方式等),才能有效发挥道路系统的整体性能。
目前现有的道路网系统型式可归纳为四种主要类型:方格网式道路网、环形放射式道路网、自由式道路网、混合式道路网[4]。
1.2.1方格网式道路网方格网式道路网又称棋盘式,是最常见的一种道路网类型,它适应于地形平坦的城市。
用方格网道路划分的街坊形状整齐。
有的城市在方格网的基础上增加了若干条放射干线,以利于对角线方向的交通,但因此又将形成三角形街坊和复杂的多路交叉口。
方格网式道路网具有很好的规则性,相互道路相交垂直,可以将道路相交形式抽象成图1a中的形式。
在城区中,为了近距离出行的方便,在不同的街区间会出现交通小道,这些交通小道可以是沿对角线方向,也可以是沿道路中间穿过街区方向,可以抽象为图1b中的情况。
(a)(b)图1 方格网道路类型方格式道路网中复杂的道路网可以看作由简单的道路组合单元组成,(图2),方格式道路网中道路之间相互垂直,各个组成单元多由正方形道路网或长方形道路网组成,其中,为了不同街区间的方便,会在有的街区(即道路网中的方格组成单元)中穿插少许道路,而将方格单元切分成不同的单元。
浅谈城市道路交通监控系统的构成
浅谈城市道路交通监控系统的构成城市道路交通监控系统是一种利用现代信息技术和通信技术,对城市道路交通进行实时监控和管理的系统。
它通过摄像头、传感器、监测设备等,对交通流量、交通事故、交通信号和交通态势等进行全方位监测和数据采集,并通过通信网络将数据传输到监控中心,实现对交通情况的实时监控和预警,从而提高城市道路交通的安全性和效率。
城市道路交通监控系统通常由以下几个主要组成部分构成:1. 监控中心:监控中心是整个系统的核心部分,负责数据采集、数据处理和数据展示等工作。
监控中心一般设在交通管理部门或公安交警部门,通过监控中心可以看到各个监控点的实时视频画面,对交通情况进行调度和管理。
2. 摄像头:摄像头是监控系统中最常见的设备之一,负责对交通路段进行实时视频监控。
摄像头通常安装在交通繁忙的路口、路段及交通枢纽等重要位置,可以实时记录交通流量、交通违法行为和交通事故等情况。
3. 传感器:传感器是用来检测交通状态和环境参数的设备,常用的有车辆检测器、地磁检测器、气象检测器等。
传感器可以实时感知交通流量、车辆速度、道路状况和天气情况等,并将数据传输到监控中心进行分析和处理。
4. 交通信号设备:交通信号设备包括红绿灯、标志牌、标线等,用于指导车辆和行人的交通行为。
交通信号设备通常与监控系统连接,可以通过监控中心对信号进行控制和调度,以提高交通流量的运行效率和道路的通行能力。
5. 数据传输网络:数据传输网络是连接各个监控点和监控中心的通信网络,用于传输监控数据和指令。
常见的数据传输网络包括有线网络和无线网络,如光纤、电缆、无线局域网等。
6. 数据存储与处理系统:数据存储与处理系统用于存储和管理监控系统采集的海量数据。
它通常由服务器、数据库和数据分析软件等组成,可以对数据进行有效存储、管理和分析,提供综合性的数据支持和决策参考。
7. 应急联动系统:应急联动系统是用于处理紧急情况和应急事件的系统。
它可以根据监控系统采集到的数据和监控中心的指令,及时发布预警信息、调度警车和救援车辆,指挥交通疏导和路面清理等应急工作。
基于自组织特性的城市交通网络优化

基于自组织特性的城市交通网络优化第一章:引言随着城市化进程的不断加速和人口数量的增加,城市交通问题日益凸显。
城市交通网络是城市运行的重要组成部分,发挥着极其重要的作用。
如何优化城市交通网络成为亟待解决的问题。
目前,针对城市交通网络优化的研究已经取得了一定的成果,但在大城市的实际情况下,仍然存在许多挑战和难题。
本文将探讨基于自组织特性的城市交通网络优化的相关研究。
第二章:城市交通网络的基本构成及问题城市交通网络由道路、公交、地铁等构成。
其中,道路网络是最为基础的交通网络,其合理性直接关系到城市交通的畅通与否。
然而,在城市交通网络中,道路的规划与建设面临着种种问题。
一方面,城市人口的持续增长导致交通需求不断增加,现有道路无法满足需求,因此需要扩建道路;另一方面,道路扩建也面临着种种限制,如土地资源有限、环境保护要求等。
这些问题使得城市交通网络优化变得非常复杂。
第三章:基于自组织特性的城市交通网络优化方法自组织特性是指系统中的个体在无中心控制下,通过相互作用和适应过程形成的稳定有序结构。
在城市交通网络中,个体可以指路段、车辆、行人等。
自组织特性可以帮助优化城市交通网络,降低交通拥堵和耗时。
1. 路网自适应优化模型在城市交通网络中,路段之间存在着复杂的交互关系。
路段之间的拥堵、通行速度等都会影响到道路的状态。
因此,构建路网自适应优化模型可以帮助优化城市交通网络。
2. 基于智能化技术的交通管理随着技术的不断发展和普及,智能化技术的应用范围不断扩大。
在城市交通网络中,智能化技术可以帮助实现对交通流量、交通状态的实时监测和控制,从而调整交通流量和优化交通效率。
3. 公交自组织调度算法公交作为城市交通网络中的重要组成部分,其运营效率和管理水平直接关系到城市交通的畅通。
而公交的调度问题也一直是城市交通中的难点之一。
基于自组织特性的公交自组织调度算法可以帮助优化公交的运行效率和管理水平。
第四章:实践案例分析北京市近年来进行了一系列的城市交通网络优化措施,如地铁网络的不断扩建、公交系统的智能化管理等。
交通网络布局及形式 城市路网结构分析 PPT
城市路网
1
城市路网的布局结构
2
城市路网等级结构
3
城市路网功能结构
城市路网布局结构
❖常见的城市道路网形态大体可以分为以 下几种:
▪ 棋盘式(方格网式) ▪ 环形放射式 ▪ 方格环形放射式 ▪ 自由式 ▪ 混合式 ▪ 线性或带形道路网 ▪ 手指状道路网
方格网状路网
❖ 方格网式又称棋盘式,是最常见的一种道路网类型,它适用于地形平 坦的城市。
城市路网等级结构
城市道路等级结构
❖ 根据规范,200万人口以上的大城市道路网 络级配大致为1:2:3:8;人口在50-200万 的城市网络级配大致为 1:3:3.5:10。
❖ 要结合城市的地形、城市形态及交通特性等 因素综合考虑
城市道路功能结构
❖ 区分道路功能的因素
▪ 道路在城市交通的地位 ▪ 承担交通量的出行距离 ▪ 交通量的通过性或集散性特性 ▪ 交通量的生存性或生活性特性
❖ 代表城市:北京、西安等城市的老城区
方格网状路网
方格网状路网
❖ 优点
▪ 布局严整、简洁,方向性,有利于建筑布置 ▪ 交通分布均匀 ▪ 交叉口组织较容易 ▪ 重新分配车流方面具有较大的灵活性
❖缺点
▪ 交叉口较多,对车流运行的连贯有影响 ▪ 非直线系数较大,对角线方向交通联系不便 ▪ 主次干道之间功能不易明确 ▪ 不利于过境交通分流,对城市扩展不利
谢谢您的聆听!
带形道路网
❖ 通常以一条干道为轴,沿线两侧布置工业和居住 建筑,从干道分出一些主路联系每侧的建筑群。
❖ 代表城市:兰州、济南
带形道路网
带形道路网
❖ 拉萨路网布局图
带形道路网
❖优点 ▪ 对城市地形条件适应性好 ❖缺点 ▪ 纵向延伸大,易导致公共设施分散 ▪ 缺少强有力的中心,不利于城市的凝聚 ▪ 易导致交通轴向的聚集和中心起向四周的若干条放射线和以 城市中心为圆心的几条环行线组成。
城市道路网络有哪些结构形式[精品文档首发]
![城市道路网络有哪些结构形式[精品文档首发]](https://img.taocdn.com/s3/m/eba532502e3f5727a5e962aa.png)
城市道路网络有哪些结构形式[精品文档首发]城市道路网络有哪些结构形式道路网络是城市网络物化的重要形态之一,它是城市空间生长的骨架,支撑着城市内部各种功能空间性分布,同时也反映着城市与外界区域的联系及城市空间整体的开放程度。
我国城市根据当地自然条件、城市运输需要以及城市总体布局的要求,经过改建和建设形成多种不同的道路网结构形式,主要有以下4种:1、方格式每隔一定距离设置纵向的和横向的接近平行的道路,但由于地形和历史等原因,方格式道路网不一定是严格垂直和平行的,这是我国城市道路网最普遍的一种布局形式,如西安、洛阳等一些平原城市。
这种结构的优点是:(1)布局整齐,有利于建筑布置和方向识别;(2)交叉口形式简单,便于交通组织和控制。
缺点是:道路非直线系数较大,交叉口过多,影响行驶速度。
2、环形放射式环形放射式的道路网有若干条环线和起自城市中心或环线上的某一点的射线组成,如天津市就是通过建设内环、中环和外环及14条放射干道构成了环形放射式道路网络。
这种结构的优点是:(1)有利于城市中心与其他分区、郊区的交通联系;(2)网络非直线稀疏较小。
缺点是:街道形状不够规则,存在一些复杂的交叉口,交通组织存在一定困难。
3、自由式城市道路根据地形特点,或依地势高低建筑而成,道路网无一定的几何形状。
主要形成在山丘地带或沿海沿河的城市。
如山城重庆位于嘉陵江与长江汇合处,道路主要沿等高线开辟,形成了不同高程的道路网,并以几条干道(包括隧道)将其相连。
这种结构的优点是:(1)能充分结合自然地形;(2)节省道路工程费用。
缺点是:道路线路不规则,造成建筑用地分散,交通组织困难。
4、混合式因地制宜,将上述两种或三种道路网络形式混合在一起,混合式如果使用得当可以尽得各种形式的优点,扬长避短。
目前较多采用的是方格式与环形放射式的混合,它是我国众多方格式道路网向现代城市交通体系发展的主要途径之一,北京、成都的道路网便属此类型。
结语:任何一个人,都要必须养成自学的习惯,即使是今天在学校的学生,也要养成自学的习惯,因为迟早总要离开学校的!自学,就是一种独立学习,独立思考的能力。
城市道路网结构划分与等级划分

城市道路网结构划分与等级划分城市道路网结构划分与等级划分报告人:栾学晨武汉大学测绘遥感信息工程国家重点实验室内容提要研究背景道路网等级选取方法实验与分析结论与展望1234武汉大学测绘遥感信息工程国家重点实验室2研究背景武汉大学测绘遥感信息工程国家重点实验室3研究背景武汉大学测绘遥感信息工程国家重点实验室4研究背景武汉大学测绘遥感信息工程国家重点实验室5研究背景武汉大学测绘遥感信息工程国家重点实验室6研究背景如何正确地将道路分级? ? 如何显示地图的内容?武汉大学测绘遥感信息工程国家重点实验室7研究背景现有城市道路网分级方法–属性信息高速公路、城市高速路、国道、主要地方道、一般县道、市镇街道、其他道路? 车道数、道路宽度? 分级简单快捷,但属性信息常常缺失,并且属性信息难以正确反映城市道路网的结构特征与实际交通流情况– GPS交通流数据分析GPS浮动车数据→道路使用强度、载负量? 分级结果符合实际情况,但需要大量观测数据–几何结构路段链长度、中介中心性、度中心性、接近中心性武汉大学测绘遥感信息工程国家重点实验室8道路网等级选取方法基于城市结构形态的道路分级方法–生成道路网路段链–构建道路网对偶图–计算结构化指标–指标集成与分级武汉大学测绘遥感信息工程国家重点实验室9道路网等级选取方法基于城市结构形态的道路分级方法–生成道路网路段链–构建道路网对偶图–计算结构化指标–指标集成与分级武汉大学测绘遥感信息工程国家重点实验室10道路网等级选取方法基于城市结构形态的道路分级方法–生成道路网路段链–构建道路网对偶图1 Degree –计算结构化指标 centrality maximum –指标集成与分级2 6 5 7 8 Between-ness centrality maximum9104 Closeness centrality maximum3武汉大学测绘遥感信息工程国家重点实验室11道路网等级选取方法基于城市结构形态的道路分级方法–生成道路网路段链–构建道路网对偶图–计算结构化指标–指标集成与分级武汉大学测绘遥感信息工程国家重点实验室12道路网等级选取方法现有方法的不足–当处理城市中表达较为详细的复杂道路网数据时,该方法连接的路段链将产生双行道分离以及环岛处截断等错误。
城市交通网络拓扑结构的地理分析

城市交通网络拓扑结构的地理分析一、引言随着城市人口的不断增长和交通问题的日益突出,研究城市交通网络拓扑结构的地理分析变得越来越重要。
城市交通网络拓扑结构的地理特征对交通规划、交通流量管理以及城市可持续发展等方面具有重要意义。
本文将通过对城市交通网络拓扑结构的地理分析,探讨其对城市发展的影响。
二、城市交通网络拓扑结构城市交通网络拓扑结构是指城市中各交通节点和道路之间相互连接关系的总和。
这一拓扑结构对于交通的流动和分布起着至关重要的作用。
一种常见的拓扑结构是中心化结构,即以市中心为中心,辐射状地向外延展,形成辐射状的交通网络。
这种结构在早期城市中比较常见,但随着城市规模的扩大和交通需求的增加,中心化结构的缺点逐渐显现。
另外一种常见的结构是分散化结构,即多个节点之间具有相对独立的交通网络,各节点之间相互连接,形成一个复杂的网络体系。
这种结构能够更好地适应城市的发展需求,但也存在一些挑战,例如节点之间的交通流量分配不均等等。
三、影响城市交通网络拓扑结构的地理因素1. 土地利用:城市交通网络的结构与城市的土地利用紧密相关。
城市中的商业区、居住区、工业区等不同的功能区域会对交通网络的分布和密度产生影响。
例如,商业区和居住区的交通需求相对较高,会形成相对密集的交通网络,而工业区的交通需求相对较低,可能形成较为稀疏的交通网络。
2. 地形地势:地形地势对城市交通网络的形成和分布也具有重要影响。
山区或湖泊等自然障碍会对交通网络的连通性和布局造成一定的限制。
而河流、湖泊等水系的存在,则会为城市交通网络提供了一些优势,水上交通也成为一个重要的选择。
3. 城市规划:城市规划对于城市交通网络的拓扑结构也起着重要作用。
恰当的城市规划可以避免交通网络过于密集或过于稀疏,使得交通流量更加合理地被分配。
此外,城市规划还可以考虑多种交通方式的协调发展,提高整体的交通效率。
四、城市交通网络拓扑结构的影响城市交通网络拓扑结构的地理特征对城市发展具有重要影响。
利用轨迹大数据进行城市道路交叉口识别及结构提取

利用轨迹大数据进行城市道路交叉口识别及结构提取唐炉亮;牛乐;杨雪;张霞;李清泉;萧世伦【摘要】Intersection is an important part of the generation and renewal of urban traffic network.In this paper, a new method was proposed to detect urban intersections automatically from the spatiotemporal big trace data.Firstly, the turning point pairs were based on tracking the trace data collected by vehicles.Secondly, different types of turning point pairs were clustered by using spatial growing clustering method based on angle and distance differences, and the clustering methods of local connectivity was used to recognize the intersection.Finally, the intersection structure of multi-level road network was constructed with the range of the intersection and turning point pairs.Taking the taxi trajectory data in Wuhan city as an example, the experimental results showed that the method proposed in this paper can automatically detect and recognize the road intersection and its structure.%交叉口是城市交通路网生成、更新的重要组成部分.本文基于车辆时空轨迹大数据,提出了一种城市交叉口自动识别方法.该方法首先通过轨迹跟踪识别轨迹数据中包含的车辆转向点对;然后基于距离和角度的生长聚类方法进行转向点对的空间聚类,并采用基于局部点连通性的聚类方法识别交叉口;最后利用交叉口范围圆和转向点对提取城市各级别路网下的交叉口结构.以武汉市出租车轨迹大数据为例,对武汉市城区内189个交叉口进行了探测.试验结果表明,本文所提方法可以准确地从轨迹大数据中识别出城市交叉口及其结构.【期刊名称】《测绘学报》【年(卷),期】2017(046)006【总页数】10页(P770-779)【关键词】城市交通路网;交叉口自动识别;交叉口结构;相似度聚类;轨迹大数据【作者】唐炉亮;牛乐;杨雪;张霞;李清泉;萧世伦【作者单位】武汉大学测绘遥感信息工程国家重点实验室,湖北武汉 430079;武汉大学测绘遥感信息工程国家重点实验室,湖北武汉 430079;武汉大学测绘遥感信息工程国家重点实验室,湖北武汉 430079;深圳大学土木工程学院空间信息智能感知与服务深圳市重点实验室,广东深圳 518060;武汉大学测绘遥感信息工程国家重点实验室,湖北武汉 430079;深圳大学土木工程学院空间信息智能感知与服务深圳市重点实验室,广东深圳 518060;武汉大学测绘遥感信息工程国家重点实验室,湖北武汉 430079;田纳西大学地理系,美国田纳西州诺克斯维尔市 37996-0925【正文语种】中文【中图分类】P208城市交叉口的空间位置、范围及详细的转向信息是构成城市各级交通路网数据的关键[1]。
一种城市路网多层次复合网格模式识别方法
㊀㊀第52卷㊀第11期测㊀绘㊀学㊀报V o l.52,N o.11㊀2023年11月A c t aG e o d a e t i c ae tC a r t o g r a p h i c aS i n i c a N o v e m b e r,2023引文格式:王安东,武芳,巩现勇,等.一种城市路网多层次复合网格模式识别方法[J].测绘学报,2023,52(11):1994G2006.D O I:10.11947/j.A G C S.2023.20220528.WA N G A n d o n g,WUF a n g,G O N GX i a n y o n g,e t a l.Ar e c o g n i t i o n a p p r o a c h f o r c o m p o u n d g r i d p a t t e r no f u r b a n r o a d n e t w o r k s [J].A c t aG e o d a e t i c a e tC a r t o g r a p h i c aS i n i c a,2023,52(11):1994G2006.D O I:10.11947/j.A G C S.2023.20220528.一种城市路网多层次复合网格模式识别方法王安东,武㊀芳,巩现勇,翟仁健,刘呈熠,邱㊀越,张寒雪信息工程大学地理空间信息学院,河南郑州450001A r e c o g n i t i o na p p r o a c h f o r c o m p o u n d g r i d p a t t e r no f u r b a n r o a dn e t w o r k s W A N G A n d o n g,W U F a n g,G O N G X i a n y o n g,Z H A IR e n j i a n,L I U C h e n g y i,Q I U Y u e,Z H A N GH a n x u eI n s t i t u t eo fG e o s p a t i a l I n f o r m a t i o n,I n f o r m a t i o nE n g i n e e r i n g U n i v e r s i t y,Z h e n g z h o u450001,C h i n aA b s t r a c t:A s t h es k e l e t o no fu r b a nc i t i e s,t h es p a t i a l p a t t e r nr e c o g n i t i o no f r o a dn e t w o r k s i so f g r e a t s i g n i f i c a n c ef o r m a p g e n e r a l i z a t i o n,s p a t i a ld a t a m i n i n g,a n d m u l t iGs c a l er e p r e s e n t a t i o n.T h i s p a p e r p r e s e n t sa na p p r o a c h t o r e c o g n i z i n g t h ec o m p o u n d g r i d p a t t e r no f r o a dn e t w o r k sw i t h l o c a l h e t e r o g e n e i t y b a s e do n r o a dm e s h e s.F i r s t l y,t h em u l t i l e v e l c o g n i t i v e c h a r a c t e r i s t i c s o f t h e l i n e a r a n d g r i d p a t t e r n o f r o a d m e s h e sa r ea n a l y z e d,a n dt h e m u l t i l e v e lc o g n i t i v eo r d e r,w h i c hf r o m b a s i c m e s h,c o m p o u n d m e s ht o r e g u l a r p a t t e r n,i s p r o p o s e d.S e c o n d l y,t h e r e c o g n i t i o n m e t h o d s o fi n c l u s i o n r e l a t i o n s h i p,p a r a l l e l r e l a t i o n s h i p,a n dl i n e a r p a t t e r n b e t w e e nr o a d m e s h e s a r e d e s i g n e d c o n s i d e r i n g t h e c o m p o s a b i l i t y, l i n e a r i t y,a n de x t e n s i b i l i t y o fc o m p o u n dl i n e a r p a t t e r n.F i n a l l y,t h el i n e a r p a t t e r n sa r ec o m b i n e d a n d d e c o m p o s e d t oe x t r a c t t h ec o m p o u n d g r i d p a t t e r no f r o a d m e s h e s.E x p e r i m e n t ss h o wt h a t t h e p r o p o s e d m e t h o d i s e f f e c t i v e f o r c o m p o u n d g r i d p a t t e r n r e c o g n i t i o nw i t h t h ea g r e e m e n t so f h u m a n s p a t i a l c o g n i t i v e c h a r a c t e r i s t i c s.K e y w o r d s:c a r t o g r a p h i c g e n e r a l i z a t i o n;r o a d n e t w o r k;r o a d m e s h e s;p a t t e r nr e c o g n i t i o n;m u l t i l e v e l c o g n i t i o n;g r i d p a t t e r n摘㊀要:道路网作为城市骨架,其模式识别对于地图综合㊁空间数据挖掘与多尺度表达具有重要意义.针对大比例尺数据中局部异质性明显的道路网格模式识别问题,提出基于网眼的城市道路多层次复合网格模式识别方法.首先分析了道路网眼直线和网格模式的多层次认知特点,提出了 基础网眼➝复合网眼➝规则模式 的多层次认知顺序;然后考虑复合直线模式的组合性㊁延伸性和直线性约束,设计了道路网眼直线模式㊁包含关系和并列关系的识别方法;最后通过对直线模式的组合分解,提取道路网眼的网格模式.试验表明本文方法能有效识别路网数据中的复合网格模式,识别结果符合人类认知特点.关键词:制图综合;道路网;网眼;模式识别;多层次认知;网格模式中图分类号:P208㊀㊀㊀㊀文献标识码:A㊀㊀㊀㊀文章编号:1001G1595(2023)11G1994G13㊀㊀城市道路网是城市范围内不同功能㊁等级㊁区位的道路,以一定密度和适当形式组成的网络结构[1].作为城市的基础骨架,其结构模式体现了城市的主要结构和空间格局,反映出城市的地形地貌特点㊁功能结构和规划治理情况,蕴含着大量城市形成和发展的内在机制[2].对其结构模式的挖掘和识别是地图综合㊁城市形成㊁更新和扩张㊁交通规划设计等领域的研究热点和难点[3G5].相关研究从不同研究重点出发,将道路网分为不同结构模式,如网格模式㊁环型模式㊁放射型模式㊁复杂道路交叉口等显式模式[6G11],以及城市中心㊁热点区域㊁城市建成区等隐式模式[12].网格模式作为城市道路网的典型结构模式,在城市布局中十分常见,在长达几千年的城市发展史上,都得到广泛的采用[13].道路网格模式的识别对城市空间特征挖掘㊁交通规划及地图自动综合具第11期王安东,等:一种城市路网多层次复合网格模式识别方法有重要意义.根据识别的基本模式单元,现有道路网格模式的识别方法可大体分为两类.(1)基于路段的识别方法.此类方法多将道路网抽象为图结构,以图中顶点作为基本处理单元,从顶点的几何㊁上下文关系特征中抽象出与路网结构相关的特征项,借助图论㊁统计学或机器学习方法进行处理或学习,实现网格模式识别.例如,基于道路结点和改进的霍夫变换策略来实现规则格网的识别[14];通过构建道路网对偶图,采用交㊁并㊁联合等图运算来提取基础格网模式[15];基于道路结点的几何㊁拓扑特征,利用多项式评定模型识别道路网中的典型结构模式[16];基于道路网的线性单元剖分,提出5种特征参量,采用支持向量机分类来提取网格模式[17G18];在构建道路网原始图的基础上,利用图卷积神经网络模型,通过学习人工标注样本,实现网格模式的识别[19]等. (2)基于网眼的识别方法.此类方法将道路网中路段围成的闭合区域转化为面,即道路网眼,通过计算网眼与邻近网眼的形状㊁方向㊁尺寸相似性及排列特征,采用邻近搜索㊁任务分类㊁隶属度计算或自组织映射聚类等方法完成网格模式的识别.例如,通过计算网眼的几何特征相似性,采用区域生长算法识别网格模式[20G21];基于网眼的形状和关系描述参量,采用机器学习算法识别网格模式,以减少参数阈值设置的人工干预[22G25],等.然而,当前研究中至少存在如下问题有待解决:①根据定义,道路网格模式的基本特征是由两组几乎平行的道路垂直相交构成,网眼形状大多为近似矩形或平行四边形.然而,基于路段的识别方法大多以道路网结构中的 正交性 原则为依据,设计网格模式的特征因子,忽略了网格模式中相邻网格间的尺寸㊁形状相似性和分布的延伸性.从结构模式的定义来看,这些研究的部分识别结果更接近于道路网的 正交模式 或 方格模式 ,而非 网格模式 .②基于网眼的已有识别方法均以单个网眼面要素及相邻网眼间 一对一 的邻近关系作为研究对象,对于整体规则㊁局部破碎的网眼群组,无法将其作为一个整体参与模式构建.为了解决具有局部异质性的道路网格模式识别问题,本文基于道路网眼,顾及视觉认知的层次性,提出一种城市道路网多层次复合网格模式的识别方法,主要解决两个问题:①道路网眼分布模式的多层次认知特征和定义;②网眼复合直线模式和复合网格模式的识别.1㊀道路网眼分布模式的多层次认知特点道路网眼是指道路网中路段围成的闭合区域.与其他面状地图要素相似,道路网眼群组具有丰富的分布模式,直线模式和网格模式是两种典型的分布模式.直线模式中道路网眼有规律地呈直线分布,网眼间具有相似的几何特征,如方向㊁尺寸等;网格模式由若干组近似平行的直线模式与另外若干组近似平行的直线模式,以近似正交的方式相交构成.作为道路对空间划分的结果,其分布模式与道路结构模式有着密切联系.道路网眼的直线和网格模式是道路网格模式的两种表现形式,图1中模式1㊁2分别为网眼的直线和网格模式,两组模式均表现为道路网的网格模式.因此,本文以道路网眼为基本模式单元,通过提取其直线和网格模式,实现道路网格模式的识别.图1㊀道路网结构模式与网眼分布模式F i g.1㊀T h es t r u c t u r a l p a t t e r no f r o a dn e t w o r k sa n dt h ed i s t r i b u t i o n p a t te r no fm e s h依据格式塔认知准则[26]和 大范围优先 的视知觉认知理论[27G28],人类更倾向于以 主体ң细节 的顺序来认知事物.道路网眼群组具有丰富复杂的几何㊁拓扑特征,人类的认知过程也必然遵循一定的顺序,从而形成了其空间关系的层次性.观察者观看地图时,首先关注道路网眼的整体特征,如图2(a)红色方框中网眼整体具有明显的网格模式特征;然后,才会注意到局部网眼间的细节特征,如图2(b)所示,蓝色网眼间的几何形态差异和复杂拓扑关系会被进一步感知.然而,当前相关研究仅考虑相邻单个网眼间的 一对一 关系,难以识别由多个不规则的网眼多边形拼接而成的网格网眼,对于大比例尺地图中局部异质性明显的道路网格模式,识别结果并不符合人类认知[29].5991N o v e m b e r 2023V o l .52N o .11A G C Sh t t p :ʊx b .c h i n a s m p .c om 图2㊀整体到局部的认知过程F i g .2㊀T h e c o gn i t i o n p r o c e s s f r o m w h o l e t o p a r t ㊀㊀为解决网格模式中局部网眼破碎的问题,本文引入 复合道路网眼 的概念.复合道路网眼的直线和网格模式具有多层次认知的特点:宏观尺度下,道路网眼整体呈直线或网格模式分布;中观尺度下,模式由几何特征相似㊁排列规律相近的简单或复合矩形网眼构成;微观尺度下,根据简单网眼的组合方式,复合矩形网眼进一步划分为包含关系和并列关系复合网眼.复合道路网眼直线和网格模式的多层次认知关系如图3所示.以图4(a)中道路网为例,各层次的具体含义如下.图3㊀道路网眼多层次认知关系F i g .3㊀T h e r e l a t i o n s h i p o fm u l t i l e v e l c o gn i t i on 图4㊀多层次认知过程F i g .4㊀T h em u l t i l e v e l c o gn i t i v e p r o c e s s ㊀㊀(1)整体层,包括直线模式和网格模式,其中直线模式的识别是网格模式识别的前提和保障.网眼直线模式具有以下的表现形式:①模式内部的各个网眼具有相似的形状㊁大小和方向特征;②模式内相邻网眼方向一致,且模式的全局方向与各网眼组件方向近似相同或正交;③模式内相邻网眼的公共边近似为两最小面积外界矩形的长边或短边,图4(b )中红色虚线分别表示呈直线模式分布的网眼.网格模式由多组直线模式近似垂直相交构成,处于更高的认知层次,如图4(b )中9组直线模式以近似正交的方式相交构成网格模式.(2)组件层,构成单元为近似矩形的道路网眼.根据矩形网眼所中的基础网眼数量,分为简单矩形网眼和复合矩形网眼,分别如图4(c )中网眼3㊁9和网眼1㊁2㊁4㊁5㊁6㊁7㊁8.其中,简单矩形网眼形状为近似矩形;复合矩形网眼包含多个任意形状的道路网眼,组合后形状为近似矩形.从矩形网眼与基础网眼的空间对应关系的角度来看,组件层中包含1ʒ1(简单网眼)和1ʒn (复合网眼)的空间对应关系.(3)原子层,构成单元为由道路网结点㊁路段直接围成的封闭区域多边形,即简单网眼.根据邻接关系,将组件层复合网眼中简单网眼间关系划分为包含关系和并列关系.包含关系复合网眼由一个主体网眼和若干次要网眼组成,如图4(d)中灰色网眼5㊁6,网眼8㊁9,网眼10㊁11和网眼17㊁18.主次网眼间空间邻近,整体轮廓互补.其中,主体网眼的面积相对较大,在视觉认知中占主导地位,反映该复合网眼的主要形状特征,如图4(d )中网眼6㊁8㊁10和18;次要网眼的面积相对较小,在视觉认知中占从属地位,如图4(d )中网眼5㊁9㊁11和17.并列关系复合网眼由若干简单网眼组成,网眼为任意形状多边形,组合后形状为近似矩形,并与相邻网眼构成直线模式.网眼间并列关系难以通过自底向上的组合方法进行探测,6991第11期王安东,等:一种城市路网多层次复合网格模式识别方法其关系的识别依赖于复合网眼邻域的模式特征.图4(d)中蓝色网眼1㊁2㊁3㊁4,网眼12㊁13和网眼14㊁15㊁16分别为具有并列关系的简单网眼.2㊀道路网多层次网格模式识别结合道路网眼的多层次认知特点,本文采用自底向上与自顶向下相结合的策略,提出一种多层次道路网眼直线和网格模式的识别方法,整体框架如图5所示,基本思想和关键步骤如下.(1)根据视知觉感知理论中完整性㊁规则性等心理倾向,采用自底向上的策略,合并具有包含关系的网眼,将整体规则㊁局部不规则的相邻网眼组合为视觉感知上更高级的复合网眼.(2)考虑相邻网眼间的尺寸㊁形状相似性和分布的直线性,构建直线模式结构化参数,以此为约束提取直线模式.(3)根据直线模式分布的延伸性,自顶向下构建直线模式连续匹配模板,搜索合并直线模式两端具有并列关系的道路网眼,实现复合直线模式的提取.(4)采用降维的思想,将直线模式网眼组以二维的线段表示,对其进行分解和组合,实现道路网眼网格模式的提取.图5㊀本文方法整体框架F i g.5㊀T h e f r a m e w o r ko f t h e p r o p o s e dm e t h o d道路网眼形状为近似矩形是其作为直线和网格模式的组成单元的必要条件[20G24].本文采用矩形度(R e c)和凹凸度(C o n v)[29]作为网眼矩形相似度的度量参数,具体含义与计算方法见表1.表1㊀网眼矩形相似度的度量参数T a b.1㊀T h em e t r i c s o f r o a dm e s h r e c t a n g l e s i m i l a r i t y参数参数含义计算方法矩形度R e c描述多边形呈矩形的程度网眼自身面积与其最小面积外接矩形面积的比值凹凸度C o n v描述道路网眼多边形的凹凸程度网眼面积与其凸包面积的比值2.1㊀简单直线模式识别简单直线模式由当前数据中的简单网眼构成,其正确识别是复合直线模式识别的基础.考虑直线模式中网眼的相似性㊁直线性和延伸性等结构特征,结合格式塔认知准则,从道路网眼的大小相似性㊁直线性和对齐程度3个方面引入识别道路网眼直线模式的结构化参数(表2).表2㊀网眼直线模式结构化参数T a b.2㊀T h e s t r u c t u r a l p a r a m e t e r s o f r o a dm e s h l i n e a r p a t t e r n参数参数含义计算方法面积比R a r e a描述两邻接道路网眼之间面积大小差异相邻网眼间较小网眼与较大网眼面积的比值方向差异D o r i e n t描述3个相邻道路网眼之间的直线性相邻3个网眼间质心连线的夹角公共边长度比R c e描述相邻道路网眼之间的对齐程度相邻网眼公共边与网眼最小外接矩形边长度比值的较小值㊀㊀根据直线模式的组织规律,同一模式内部要素间具有相似的几何形态结构.对于道路网眼,其几何形态结构主要表现为形状和大小.其中形状依靠上文中矩形相似度参数进行约束;大小相似度利用网眼面积比进行度量,面积比越大,网眼间大小相似程度越高.为保证模式中的网眼沿直线分布,以表2中方向差异参数作为约束,方向差异D o r i e n t越接近于180ʎ,模式的直线性越强.考虑到直线模式相邻网眼间具有相互对齐的特点,引入公共边长度比R c e对模式内相邻网眼间对齐程度进行约束.如图6所示,对于相邻网眼M1㊁M2,定义其公共边长度比R(c e)1,2为公共边(P1P2)长度与公共边对应网眼最小外接矩形边(E M1㊁E M2)长度的比值的较小值,公共边长度比7991N o v e m b e r 2023V o l .52N o .11A G C Sh t t p :ʊx b .c h i n a s m p .c o m 越接近于1,网眼对齐程度越高.图6㊀公共边长度比F i g .6㊀T h e l e n g t h r a t i oo f c o mm o ne d ge 综上,本文识别网眼简单直线模式的步骤如下.步骤1:根据网眼间是否具有公共边,构建相邻网眼间邻近关系,同时提取网眼群中矩形度和凹凸度分别大于阈值δR e c 和δC o n v 的简单矩形网眼,加入列表L i s t S G M .步骤2:选取L i s t S G M 中任一网眼M i 及其邻接网眼M j ,计算M i 与M j 的面积比(R a r e a )i ,j 和公共边长度比(R c e )i ,j ,若(R a r e a )i ,j >δa r e a 且(R c e )i ,j >δc e (式中δa r e a 和δc e 分别为人工设定的面积比和公共边长度比参数阈值),则将网眼M i 与M j 的邻近边e i ,j 加入直线模式临时列表t L i s t L P ,否则,返回步骤2.步骤3:设当前直线模式一侧搜索方向为{i ,j },即S e a r c h L e f t ={i ,j },另一侧搜索方向为{j ,i },即S e a r c h R i gh t ={j ,i },以S e a r c h L e f t ={i ,j }为起始搜索方向,选取M j 的邻接网眼M k ,若M j 除M i 不存在其他邻近网眼,则此搜索方向终止,以S e a r c h R i gh t ={j ,i }方向继续搜索.步骤4:计算M j 与M k 的面积比(R a r e a )j ,k 和公共边长度比(R c e )j ,k ,若(R a r e a )j ,k >δa r e a 且(R c e )j ,k >δc e ,则执行步骤5,否则,返回步骤3.步骤5:计算M i ㊁M j ㊁M k 的方向差异D o r i e n t ,若D o r i e n t >δo r i e n t ,则将e j ,k 添加至当前直线模式列表t L i s t L P 中,并令j =k ,否则,返回步骤3.步骤6:若当前直线模式向两侧搜索均终止,则该组直线模式识别结束,将当前直线模式列表t L i s t L P 加入直线模式识别结果列表L i s t L P 中,返回步骤2.循环步骤2 6,直至L i s t S G M 中全部网眼均被遍历.以图7(a)中道路网数据为例,经上述步骤识别的网眼简单直线模式如图7(b )中红色线段所示.受道路网中较低等级道路影响,一些在大尺度上认知为整体的网眼被分割成若干小网眼,呈现出局部破碎的现象,如图7(b )中网眼1㊁2㊁3.由图7(c )中网眼邻近关系可以看出,简单直线模式的提取方法仅利用简单网眼间 一对一 的邻近关系(蓝色线段),难以反映道路网的整体结构模式,需要进一步利用复合直线模式识别方法,提取局部破碎㊁整体规则的直线模式.图7㊀道路网眼简单直线模式识别结果F i g .7㊀T h e r e c o g n i t i o n r e s u l t s o f s i m pl e l i n e a r p a t t e r n 2.2㊀复合网眼构建与复合直线模式识别复合直线模式的识别是解决网眼局部异质性,实现由低级基础网眼到高级认知模式过渡的关键,其难点在于组件层中复合矩形网眼的识别和构建.对于复合矩形网眼中的包含关系和并列关系,本文分别采用自底向上和自顶向下的策略对其进行识别.2.2.1㊀包含关系识别根据包含关系网眼间轮廓互补的特点,参考文献[30]中对相离面要素主次关系识别的方法,引入公共边长周长比(R l e n g t h )和约束面积比(R c a )两个参数,分别从一维和二维两个维度描述相邻网眼之间的包含程度.以图8中道路网眼为例,红色线段P 2P 3P 4表示相邻网眼M 1㊁M 2间公共边,虚线矩形为M 2最小面积外接矩形S M B R M 2,灰色多边形P 1P 2P 3P 4为S M B R M 2与M 1的公共区域多边形,参数含义及计算方法见表3.8991第11期王安东,等:一种城市路网多层次复合网格模式识别方法图8㊀包含关系参数F i g .8㊀T h e i n c l u s i o n r e l a t i o n s h i ppa r a m e t e r 表3㊀包含关系识别参数T a b .3㊀T h e r e c o g n i t i o n p a r a m e t e r s o f i n c l u s i o n r e l a t i o n s h i p参数参数含义计算方法公共边周长比R L 描述两相邻网眼边界的包含程度相邻网眼公共边长度与网眼周长的比值约束面积比R c a描述两相邻网眼区域的包含程度网眼与相邻网眼最小面积外接矩形交集面积与网眼面积的比值根据包含关系参数和网眼矩形相似度参数,识别包含关系复合矩形网眼的步骤如下.步骤1:计算网眼矩形度R e c 和凹凸度C o n v ,将R e c <δR e c 或C o n v <δC o n v 的网眼加入列表m L i s t 中.从中选取网眼M i ,计算其与邻近网眼M j 的公共边周长比(R l e n g t h )i ,j 和约束面积比(R c a )i ,j ,若(R l e n g t h )i ,j >δL 且(R c a )i ,j >δc a ,则将网眼M i 和M j 记为包含关系组,其中δl e n g t h 和δc a 分别为人工设定的公共边周长比和约束面积比参数阈值.步骤2:合并网眼M i 与M j ,记新网眼为M n ,若R e c n >δR e c 或C o n v n >C o n v i ,说明次要网眼对主要网眼的规则程度具有补充作用,将M n 加入列表m L i s t 中,并从中删除M i 和M j ,否则删除M n .步骤3:循环步骤1㊁2,直至列表m L i s t 中的元素数量不再减少为止,此时全部具有包含关系的复合矩形网眼均被识别.以图7中道路网眼为例,利用上述步骤识别㊁合并包含关系网眼的过程如图9所示.图9(a )为步骤1包含关系的识别结果,粉色线段表示网眼间的包含关系.图9(b )为步骤2包含关系第一次合并结果(深色网眼),粉色线段表示所产生的新的包含关系.经数轮迭代,具有包含关系网眼的最终合并结果如图9(c )所示,其中深色网眼为合并后的包含关系复合网眼.图9㊀包含关系复合网眼识别与合并过程F i g .9㊀T h e r e c o g n i t i o na n d c o m b i n a t i o n p r o c e s s o f c o m p o u n dm e s h e sw i t h i n c l u s i o n r e l a t i o n s h i p2.2.2㊀并列关系识别及复合直线模式提取从认知角度来看,并列关系复合网眼产生于邻域内直线模式的延伸,例如对于图9(c )中邻近关系相似的网眼对1㊁2和2㊁3,网眼1㊁2更容易被组合为复合网眼.因此,本文利用网眼邻域的模式特征,采用自顶向下的匹配策略,识别具有并列关系的复合网眼.基本思想为:首先根据直线模式两端网眼确定初始匹配模板的几何特征;然后结合直线模式延伸性构建连续匹配模板,向两端搜索㊁匹配待识别网眼;最后结合直线模式约束条件,判定待识别网眼组合后能否构成直线模式,实现复合直线模式的提取.结合图9(a)中道路网眼,说明并列关系及复合直线模式识别方法的具体步骤.步骤1:合并具有包含关系的矩形网眼(图9(c )),提取简单直线模式(图10(a)中红色线段),存入S L P L i s t 中.步骤2:选取任意一组直线模式S L P i (图10(a)中红色加粗线段),提取其首㊁末端网眼的最小面积外接矩形,以首㊁末端网眼与其邻接网眼几何中心的相对距离d ㊁方向o 为约束,沿直线模式两端延伸方向计算匹配模板的位置,匹配模板分别记为T l ㊁T r (图10(a)中蓝色矩形).步骤3:搜索与T l 和T r 存在面状交集的网9991N o v e m b e r 2023V o l .52N o .11A G C Sh t t p :ʊx b .c h i n a s m p .c o m 眼,记为M s ,如果其模板重叠度(R t o )s ,l >δt o 或(R t o )s ,r >δt o ,则将M s 存入并列关系候选列表M L i s t 中,执行步骤4,否则,则执行步骤2,式中δT C 为人为设定的模板重叠度参数阈值.步骤4:若M l i s t 中网眼数量大于1,合并M L i s t 中全部网眼,记为M n ,如图10(b )中蓝色网眼,若R e c (M n )>δR e c ,则根据2.1节中方法,判断其能否满足直线模式结构化参数约束,若满足,执行步骤5,否则终止该侧搜索.步骤5:当直线模式S L P i 向两侧搜索均终止时,将其存入复合直线模式列表M L P L i s t,并从S L P L i s t 中移除,执行步骤2.循环步骤1 5,直至S L P L i s t 为空时,结束循环.识别结果如图10(c)所示,其中红色线段表示网眼直线模式.图10㊀并列关系网眼与直线模式识别过程F i g .10㊀T h e r e c o gn i t i o n p r o c e s s o f p a r a l l e l r e l a t i o nm e s h e s a n d l i n e a r p a t t e r n 2.3㊀网格模式提取道路网眼的网格模式由近似正交的直线模式相交构成,处于更高的认知层次.由网格模式概念可知,组成网格模式的直线模式之间需满足以下3项条件:①各组直线模式近似平行或正交;②正交的直线模式间具有相交关系;③各直线模式构成闭合回路.对于条件①,由于在直线模式中,网眼为方向一致的近似矩形,网眼构成的直线模式方向基本确定,若任意两组直线模式包含同一网眼,则其关系为近似正交;若任意两组不相交直线模式间,存在其他直线模式同时包含以上两组直线模式中的网眼,则两组直线模式近似平行.故条件①可由条件②代替.另外,若多组直线模式构成闭合回路,则相互正交的直线模式间必然相交,故条件③为条件②的充分条件.综上,本文通过对直线模式网眼构成闭合回路进行识别,提取其中的网格模式.当前研究大多采用图论中算法识别多组直线模式中的闭合回路[31G32],算法实现较为复杂.本文从几何角度出发,通过对直线模式邻近图中由结点和线段形成的封闭多边形进行聚类,实现网格模式的提取.以图11(a )道路数据为例,说明算法具体步骤.步骤1:以各直线模式中网眼几何中心为结点,依次连接相邻网眼,构建直线模式关系图G l(图11(b)中红色线段).步骤2:提取G l 中封闭区域多边形P (图11(b )中晕线多边形P 1㊁P 2㊁P 3),将其存入列表T P L i s t.步骤3:遍历T P L i s t ,若两多边形P i ㊁P j 间存在公共边(图11(b )中多边形P 2㊁P 3),则将其聚类为一组,存入列表C l u s t e r L i s t 中.图11㊀网格模式提取过程F i g.11㊀T h e e x t r a c t i o n p r o c e s s o f g r i d p a t t e r n 0002第11期王安东,等:一种城市路网多层次复合网格模式识别方法㊀㊀步骤4:根据聚类结果,提取每组聚类内多边形顶点所对应的道路网眼,记为一组网格模式网眼G r i d m ,存入G r i d _l i s t 中,如图11(c )中蓝色和黄色线段对应网眼分别为两组网格模式.3㊀试验与讨论3.1㊀试㊀验本文基于P y t h o n 和Q G I S 编程实现以上算法.试验分为两组,数据分别采用不同空间结构模式的国内外道路网数据.试验中网眼矩形度和凹凸度阈值的设置影响简单矩形网眼以及包含关系㊁并列关系的识别,结合前人的研究成果[29,33],取δR e c =0.9㊁δC o n v =0.95.算法中所涉及其他阈值设置的指导思想为:面积比和公共边长度比的阈值越大,方向差异的阈值越小,模式的直线性越强.在识别包含关系矩形网眼时,公共边周长比和约束面积比的阈值越大,主要网眼对次要网眼的包含程度越强;在识别并列关系矩形网眼时,模板重合度的阈值越大,模式的同质性越强.试验区域1为国外某地区道路网,数据来自O p e n S t r e e t M a p.如图12所示,所选试验区域内道路分布密度较高,密度不均匀,没有全局平稳的特征,存在支离破碎的短小路段,但大部分呈垂直交错结构分布,视知觉上呈现出明显的网格模式特征.试验区域包含2469个道路简单网眼.经反复测试,试验参数设置见表4.图12(b )中灰色和蓝色网眼分别为识别出的具有包含和并列关系的复合网眼,提取的直线模式和网格模式分别如图12(c )㊁(d)所示.图12㊀试验1直线模式和网格模式识别结果F i g .12㊀T h e r e c o g n i t i o n r e s u l t s o f l i n e a r p a t t e r na n d g r i d p a t t e r no f e x pe r i m e n t 1表4㊀参数阈值设置T a b .4㊀A d v i s a b l e p a r a m e t e r s e t t i n g试验简单直线模式识别包含关系识别并列关系识别面积比阈值方向差阈值公共边长度比阈值公共边周长比阈值约束面积比阈值模板重合度阈值试验10.510ʎ0.90.40.50.8试验20.410ʎ0.80.40.50.71002。
智慧城市组成部分

智慧城市组成部分智慧城市是指利用信息技术和互联网技术,将城市各个部分进行智能化改造和互联互通,提高城市管理和服务的效率,提升城市居民的生活质量和幸福感。
智慧城市的建设离不开各种组成部分的支持和配套,下面将详细介绍智慧城市的组成部分。
1. 智能交通系统智慧城市的交通系统是其中一个重要组成部分。
通过应用先进的交通管理技术和智能化设备,实现交通流量的监测、调控和优化,提高交通运输的效率和安全性。
智能交通系统可以包括智能交通信号灯、智能公交站牌、智能停车场等设施,以及交通数据采集、处理和分析的相关技术。
例如,在智慧城市中,交通信号灯可以根据实时交通流量自动调整信号灯的时长,以减少交通拥堵。
智能公交站牌可以提供实时公交车到站信息,方便市民出行。
智能停车场可以通过感应器和导航系统,帮助司机快速找到空余停车位,减少寻找车位的时间和交通堵塞。
2. 智能能源管理系统智慧城市的能源管理系统是为了提高能源利用效率和降低能源消耗而设计的。
通过智能化的能源监测、控制和调度,实现能源的合理分配和利用,减少能源浪费和环境污染。
智能能源管理系统可以包括智能电网、智能家居、智能照明等设施,以及能源数据采集、分析和优化的相关技术。
例如,在智慧城市中,智能电网可以根据电力需求和供应情况进行动态调整,实现电力的高效分配和利用。
智能家居可以通过智能设备和传感器,实现家庭能源的智能控制和管理,如自动调节室内温度、光照等。
智能照明可以根据环境光线和人员活动情况,自动调节照明亮度和时间,节约能源。
3. 智慧环境监测系统智慧城市的环境监测系统是为了实时监测和评估城市环境状况,保护环境和居民健康而设计的。
通过各种传感器和监测设备,收集和分析环境数据,及时预警和处理环境污染和灾害。
智慧环境监测系统可以包括空气质量监测、水质监测、噪音监测等设施,以及环境数据采集、处理和分析的相关技术。
例如,在智慧城市中,空气质量监测系统可以实时监测和评估城市空气质量,提供空气污染指数和相关预警信息。
各个地方的路网知识点总结
各个地方的路网知识点总结导言路网作为城市交通的组成部分,在城市的发展和交通运输中起着非常重要的作用。
路网包括城市道路、高速公路、铁路、桥梁、隧道等各种交通设施。
不同的地方有着不同的路网结构和特点,了解路网的知识对于规划和管理城市交通具有重要意义。
本文将从城市道路、高速公路、铁路、桥梁、隧道等方面,对各个地方的路网知识点进行总结。
一、城市道路1. 城市道路分类城市道路可以按照不同的标准进行分类,主要有以下几种分类方法:(1)按用途分类:包括城市主干道、次干道、支路等。
(2)按道路等级分类:一般分为快速路、主干路、次干路和支路等。
(3)按道路结构分类:包括高架路、地下隧道、立交桥、普通道路等。
(4)按道路功能分类:分为机动车道、非机动车道、人行道等。
2. 城市道路规划城市道路规划是城市交通规划的重要组成部分,它涉及到道路的能力、布局、功能、规模等方面的问题。
城市道路规划需要考虑城市发展的总体规划,合理规划城市交通网络,解决交通拥堵等问题。
3. 城市道路设计城市道路的设计需要考虑到车辆的通行能力、安全性、舒适度等方面的问题。
设计时需要综合考虑交通流量、车速、交叉口、行人通道等因素。
4. 城市道路管理城市道路的管理包括道路的维护、保养、交通管理、交通安全等方面的问题。
这需要政府和相关部门进行统一管理,保障道路的正常使用。
二、高速公路1. 高速公路的作用高速公路作为城市交通的重要组成部分,它可以提高城市交通的通行能力,缓解交通拥堵,促进城市经济的发展。
2. 高速公路建设高速公路的建设需要考虑到地形、地质、生态环境、交通需求等因素。
在选择线路、设计、施工等方面都需要综合考虑这些因素。
3. 高速公路管理高速公路的管理包括道路的维护、保养、交通管理、交通安全等方面的问题。
这需要政府和相关部门进行统一管理,保障高速公路的正常使用。
4. 高速公路监控高速公路的监控是保障高速公路安全的重要措施,可以通过视频监控、交通监控系统等手段实现对高速公路的实时监测和管理。
城市道路网几何结构模式的自动识别方法

城市道路网几何结构模式的自动识别方法
杨必胜;栾学晨
【期刊名称】《中国图象图形学报》
【年(卷),期】2009(014)007
【摘要】在路网结构几何形状分析的基础上,提出了一种基于模式识别的方法对城市路网中的格网结构模式进行自动识别.该方法从方向一致性、形状相似性出发对路网数据中的格网结构进行识别,并在区域增长算子的基础上对识别出的相邻的格网进行聚合.实验结果表明,该方法能够有效地对城市路网中的格网结构进行自动识别,为路网数据的匹配、多尺度表达奠定基础.
【总页数】5页(P1251-1255)
【作者】杨必胜;栾学晨
【作者单位】武汉大学测绘遥感信息工程国家重点实验室,武汉,430079;武汉大学交通研究中心,武汉,430079;武汉大学测绘遥感信息工程国家重点实验室,武
汉,430079;武汉大学交通研究中心,武汉,430079
【正文语种】中文
【中图分类】P208
【相关文献】
1.快速网盒结构模式在城市道路网规划中的运用 [J], 陈明远
2.MapInfo中城市道路网络拓扑结构的自动生成 [J], 熊少非;赵丕锡;李军
3.统计和结构模式识别方法结合的多特征印鉴真伪鉴别方法 [J], 张黔;胡庆;杨静宇;
蒋韧
4.基于负压波结构模式识别方法的供水管网检漏与定位技术的研究 [J], 袁荣华;王毅;陈春刚
5.基于复杂网络理论的城市道路网络自动综合方法 [J], 夏永亮
因版权原因,仅展示原文概要,查看原文内容请购买。
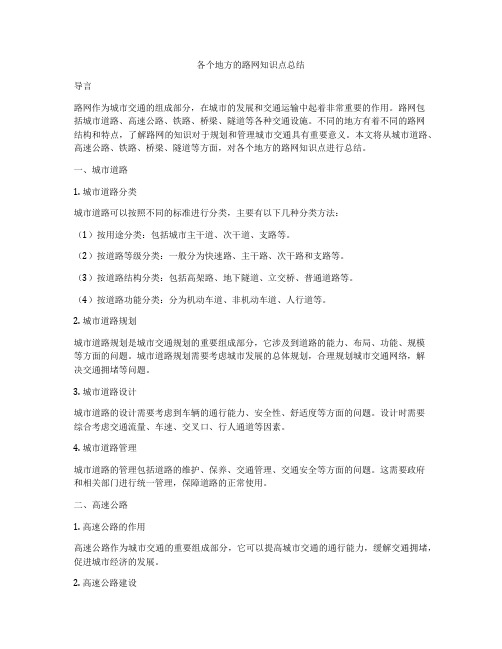
城市道路系统的基本类型(附学习图)
城市道路系统的基本类型(附学习图)城市道路系统是城市的骨架,它是城市结构布局的决定因素。
因此城市道路交通的各项设施要根据现代交通的需要,组成完善的道路交通系统。
而城市道路系统的形式是在一定的社会条件、城市建设条件及当地自然环境下,为满足城市交通以及其他各种要求而形成的。
没有共同的统一形式。
从已经形成的道路系统中,归纳为以下几种类型。
(一)放射环形道路系统是由一个中心经过长期逐渐发展形成的一种城市道路网形式。
放射线干道加上环形道路系统,由几条围绕中心不同距离的环路联通各条放射线干道。
使各区之间均有较通畅的联系。
但容易导致大量交通直接向中心地区集中。
例如俄罗斯莫斯科就是一个完整的放射环形的典型例子;国内以成都市在旧城的基础上从中心向四周较均衡的发展(图4-1)。
采用这种形式的道路系统,车流将集中于市中心,特别是大城市的中心,这样尽管环形道路起分散作用,但交通较复杂易造成拥挤现象。
放射形道路系统如长春市(图4-2)是在旧有基础上发展起来的,可以看出它是受理想城市模式和传统平面构图规划思想的影响。
其次有无锡市,它是历史悠久的古城,为大运河和沪宁铁路所贯穿,道路从中心地区自然向交通方便的地区和太湖风景区伸展。
(二)方格形道路系统也称为棋盘式,把城市用地分割成若干方正的地段,系统明确,便于建设,适用于地势平坦的平原地区,一般中小城市有较多的方格形道路网的形式,例如北京市、西安市、苏州市等一些古城均以这种形式为主(图4-3)。
(三)方格对角线道路系统方格形道路系统在规划上处理不好,易形成单向过境车辆多的现象,经过改进成为方格对角线式,解决了交通的直通,但对角线所产生的锐角对于布置建筑用地是不经济的,同时增加了交叉路口的复杂性。
(四)混合式道路系统混合式道路系统是前几类形式的混合,并结合各城市的具体条件进行合理规划,可以集中其优点,避其缺点。
例如在某大城市中,原以方格式为基础,可将放射环形同市中心所采取的方格式结合起来形成一种混合形式,发挥放射环形和方格式道路系统的共同优点,因此是比较适用的好形式。
智慧城市管理平台中的网络层包含哪几个基础网络

智慧城市管理平台中的网络层包含哪几个基础网络智慧城市是指将信息技术与城市管理相结合,通过数据的采集、分析和应用,提高城市的运行效率和居民的生活质量。
网络层是智慧城市管理平台中的重要组成部分,它负责连接各种硬件设备和传感器,将数据传输到数据处理层进行分析和应用。
在智慧城市管理平台中,网络层通常包含以下几个基础网络。
1. 传感器网络传感器网络是智慧城市管理平台中的核心网络,它由大量分布在城市各个区域的传感器节点组成。
这些传感器节点负责采集各种环境数据,如温度、湿度、噪音等。
传感器网络采用分布式自组织的方式,具有自动配置、自适应和自修复的能力。
通过传感器网络,智慧城市管理平台可以实时获取城市的环境信息,为城市管理者提供决策支持。
2. 无线通信网络无线通信网络是连接传感器节点和数据处理层的关键网络。
它提供了传感器节点之间以及传感器节点与数据处理层之间的通信手段。
无线通信网络可以采用各种通信技术,如Wi-Fi、蓝牙、LoRa等。
这些通信技术具有覆盖范围广、数据传输速率高等特点,能够满足智慧城市管理平台对数据传输的要求。
3. 云计算网络云计算网络是承载智慧城市管理平台的数据处理和应用服务的关键网络。
它将传感器网络采集到的大量数据传输到云端服务器进行存储、处理和分析。
云计算网络具有高速、高容量、高可靠性等特点,可以满足智慧城市管理平台对大数据处理的要求。
此外,云计算网络还能够提供云服务,例如人工智能算法库、数据可视化工具等,为城市管理者提供更多的决策支持。
4. 公共互联网公共互联网是连接智慧城市管理平台和城市居民的网络。
通过公共互联网,城市居民可以访问智慧城市管理平台提供的各种服务,如实时交通信息、公共设施查询等。
公共互联网的可用性、安全性和稳定性对于智慧城市管理平台的正常运行至关重要。
总结起来,智慧城市管理平台中的网络层包含传感器网络、无线通信网络、云计算网络和公共互联网。
这些基础网络相互连接,共同构成了智慧城市的信息传输和处理基础设施。
市政道路识图,必看必看必看!重要的事情说三遍!

市政道路识图,必看必看必看!重要的事情说三遍!来源:市政设计如有侵权,请联系删除城市道路概论道路按其所处位置、交通性质及使⽤特点可分为公路、城市道路、乡村道路、林区道路、⼚矿道路五种。
⼀、作⽤交通运输、公共空间、城市规划⼆、组成1.车⾏道—机动、⾮机动2.⼈⾏道—⼈⾏地下通道,⼈⾏天桥3.平侧⽯—⼜称路缘⽯,便于排⽔、保护路缘4.附属设施—排⽔设施、交通设施、绿化景观等三、城市道路分级表1-11.快速路快速路应中央分隔、全部控制出⼊、控制出⼊⼝间距及形式,应实现交通连续通⾏,单向设置不应少于两条车道,并应设有配套的交通安全与管理设施。
快速路两侧不应设置吸引⼤量车流、⼈流的公共建筑物的出⼊⼝。
2.主⼲路主⼲路应连接城市各主要分区,应以交通功能为主。
主⼲路两侧不宜设置吸引⼤量车流、⼈流的公共建筑物的出⼊⼝。
3.次⼲路次⼲路应与主⼲路结合组成⼲路⽹,应以集散交通的功能为主,兼有服务功能。
4.⽀路⽀路为次⼲路与街坊路的连接线,解决局部地区交通,以服务功能为主,沿街以居住建筑为主。
四、城市道路⽹1、⽅格⽹式便于建筑物布置,交通组织简单,易于识别⽅向;对⾓线两点绕⾏路长。
2.放射环形式中⼼区与郊区联系短捷,道路分⼯明确,易适应⾃然地形;易把车流导向市中⼼。
3.⾃由式利⽤⾃然地形,节省投资,形式⾃然;影响建筑物布置,不易识别⽅向。
4.混合式综合以上三种的优点。
五、城市道路的基本要求1.保证汽车⾏驶稳定性:不翻车、不倒溜、不侧滑2.保证⾏车通畅:⾜够的通⾏宽度和⾼度,保证视距,减少交叉3.合理的路线平⾯、纵断⾯设计4.必要的绿化景观5.满⾜通⾏能⼒和交通量要求(1)视距为了保证⾏车安全,应使驾驶员能看到前⽅⼀定距离的道路路⾯,以便及时发现路⾯上有障碍物或对向来车,使汽车在⼀定的车速下能及时制动或避让,从⽽避免事故。
驾驶⼈从发现障碍物开始到决定采取某种措施的这段时间段内汽车沿路⾯所⾏驶的最短⾏车距离,称为视距。
可分为:停车视距,会车视距,超车视距。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第41卷第10期2018年10月测绘与空间地理信息GEOMATICS&SPATIALINFORMATIONTECHNOLOGYVol.41ꎬNo.10Oct.ꎬ2018收稿日期:2018-04-03基金项目:国家重点研发计划资助项目(2017YFB0503601㊁2017YFB0503502)ꎻ国家自然科学基金项目(41671448)资助作者简介:张㊀圆(1993-)ꎬ女ꎬ山西太原人ꎬ地图制图学与地理信息工程专业硕士研究生ꎬ主要研究方向为空间数据多尺度表达ꎮ使用自组织映射网络识别城市道路主要结构张㊀圆1ꎬ李精忠1ꎬ2ꎬ帅㊀赟3(1.武汉大学资源与环境科学学院ꎬ湖北武汉430079ꎻ2.地理信息系统教育部重点实验室(武汉大学)ꎬ湖北武汉430079ꎻ3.中国地质大学(武汉)网络与教育技术中心ꎬ湖北武汉430074)摘要:城市道路中主要结构的识别在路网综合㊁多尺度路网建模㊁导航等方面起着关键作用ꎮ本文提出一种使用自组织映射(SOM:theSelf-OrganizingMap)网络来同时识别城市道路中多行道和立交桥的方法ꎮ首先计算道路网眼的几何形态特征指标ꎬ然后利用SOM对道路网眼进行分类ꎬ根据得出的网眼和道路的空间关系来提取路网中的主要结构ꎮ实验结果表明ꎬ该方法能有效地识别出城市道路中的多行道和立交桥ꎮ关键词:模式识别ꎻ道路结构ꎻ网眼形态ꎻ自组织映射网络中图分类号:P285.2+7㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1672-5867(2018)10-0027-03IdentifyingMajorStructuresofUrbanRoadsUsingSelf-OrganizingMapNetworksZHANGYuan1ꎬLIJingzhong1ꎬ2ꎬSHUAIYun3(1.SchoolofResourceandEnvironmentalSciencesꎬWuhanUniversityꎬWuhan430079ꎬChinaꎻ2.KeyLaboratoryofGeographicInformationSystem(WuhanUniversity)ꎬMinistryofEducationꎬWuhanUniversityꎬWuhan430079ꎬChinaꎻ3.Network&EducationTechnologyCenterꎬChinaUniversityofGeosciencesꎬWuhan430074ꎬChina)Abstract:Theidentificationofmajorstructuresinurbanroadsplaysakeyroleinroadnetworkintegrationꎬmulti-scaleroadnetworkmodelingꎬandnavigation.ThispaperproposesamethodtousetheSelf-OrganizingMap(SOM)toidentifymultiplelanesandflyoversinurbanroadssimultaneously.FirstꎬcalculatetheshapedescriptorsofmeshsurroundedbyroadsꎬthenusetheSOMtoclassifytheroadmeshꎬandextractthemajorstructureoftheroadnetworkaccordingtothespatialrelationshipbetweenthemeshandtheroads.Theexperimentalresultsshowthatthismethodcaneffectivelyidentifythemultiplelanesandflyoversinurbanroads.Keywords:patternrecognitionꎻroadstructureꎻmeshshapeꎻself-organizingmaps0㊀引㊀言道路网是地图㊁地理信息中最基本的地理要素之一ꎬ为智能导航㊁位置服务等应用提供了重要信息[1-2]ꎮ多行道和立交桥是其主要组成部分ꎮ其中ꎬ多行道是城市交通干线的主要部分ꎬ立交桥是城市道路网络的连接枢纽ꎮ此类道路结构的识别对把握城市结构㊁路网综合及道路更新有着重要意义ꎮ然而城市道路网形态复杂多样ꎬ对于路网结构的识别较为困难ꎮ目前ꎬ已有学者展开了对道路局部特征结构识别方面的研究ꎮ对于立交桥等道路交叉口的识别一般有两种方法:一是通过对道路节点进行聚类来识别ꎬ如William等用空间聚类和图论来识别路网中的道路节点[3]ꎬ该方法简单易行ꎬ但难以识别复杂交叉口ꎮTouya[4]和Yang[5]分别通过识别不同种类道路节点作为基元再聚类和连接交叉口的stroke长度ꎬ提高了识别精度ꎬ但这两种方法在识别大型复杂交叉口时易产生错误ꎮ二是通过典型模板库进行识别ꎬ徐柱等建立典型道路交叉口结构模板库ꎬ基于有向属性关系图和图匹配技术识别交叉口[6]ꎬ王骁等构建典型立交桥的拓扑关系ꎬ结合道路分类方法识别立交桥[7]ꎬ但这些方法不能识别非典型复杂交叉口ꎮ主干道识别方面ꎬTouya[4]计算几何形态指标并限制其阈值以提取双行道ꎬ该方法易漏判形状特殊的双行道ꎮ张浩等通过网眼形态特征和构成网眼路段之间的语义相似度识别双行道[8]ꎬ但只能提取出含有路名等语义信息的双行道ꎮ本文通过对不同道路结构的网眼特征进行聚类来识别立交桥和多行道ꎮ该方法不依赖于模板库和属性信息ꎬ并且对两种路网结构的识别可同时进行ꎮ基本思路是:先计算道路网眼的几何形态指标ꎬ选取样本输入SOM进行学习ꎻ然后用训练好的网络提取多行道和立交桥网眼ꎻ最后针对提取网眼与道路的空间关系进一步处理ꎬ确定研究区域中的多行道和立交桥ꎮ1㊀理论基础1.1㊀SOM的原理及应用的关键SOM(theSelf-OrganizingMapꎬ自组织映射网络)是Kohonen于1982年提出的一种竞争学习型的无监督神经网络[9]ꎮ其结构如图1所示ꎬ其中每个输出层神经元都拥有一个权向量ꎬ网络在接收输入向量后ꎬ计算权向量和输入向量之间的距离ꎬ距离最近的神经元及其邻近神经元的权向量将被调整ꎬ以使得这些权向量与当前输入样本的距离缩小ꎬ这个过程不断迭代ꎬ直至收敛ꎮ图1㊀SOM结构Fig.1㊀NetworkstructureofSOM㊀㊀经过训练后的网络输出层各节点会对特定的输入模式类敏感ꎬ且邻近神经元具有相似的权值ꎬSOM输出节点的空间位置体现了输入样本的内在联系[10]ꎮ针对SOM的这一功能ꎬ将道路网眼特征概括为适用于SOM聚类的数量化几何形态指标ꎬ选取合适的样本作为输入对网络进行训练ꎬ经过训练的网络可将形状相似的道路网眼映射在相同或邻近的神经元中ꎮ1.2㊀道路网眼的几何形态道路网眼是道路网纵横交错形成的最小闭合区块[11]ꎮ通过观察发现ꎬ多行道为平行的道路组合ꎬ网眼较为细长ꎮ立交桥组成路段弯曲程度高ꎬ长度较短ꎬ网眼形态较多ꎮ本文使用紧实度㊁延展度㊁凸度㊁平行度4个几何形态指标来描述网眼特征ꎬ其定义如下:上述几何形态指标从不同角度描述了道路网眼的形状特征ꎬ但由于城市道路网眼形态多样ꎬ难以确定每个指标的阈值ꎬ需要自动综合多个指标对道路网眼进行识别[12]ꎮ本文使用自组织映射网络(SOM)来识别道路网眼的种类ꎮ首先人工选取K个具有代表性的道路网眼的几何形态指标构建向量集输入SOM开始训练ꎬ使相似的道路网眼映射到相同或相近的神经元中ꎬ得到SOM道路网眼识别模型ꎮ在此模型基础上进行道路网眼识别时ꎬ仅需输入道路网眼的几何形态指标到SOM中获取其在输出节点上的位置ꎬ与训练样本网眼所对应的输出节点位置进行比较ꎬ即可得到识别结果ꎮ表1㊀网眼几何形态特征描述指标定义Tab.1㊀Definitionofdescriptionindexofroadmesh指标定义说明紧实度(Compactness)compactness=4πAreaPerimeter2Area为网眼面积ꎬPerimeter为网眼周长延展度(Elongation)elongation=LWL为最小外接矩形长ꎬW为最小外接矩形宽凸度(Convexity)convexity=AreaHullAreaArea为网眼面积ꎬHullArea为凸包面积平行度(Parallelism)parallelism=mbrPerimeterPerimetermbrPerimeter为最小外接矩形周长ꎬPerimeter为网眼周长2㊀基于SOM的路网结构识别方法2.1㊀SOM网络的训练上述几何形态指标从不同角度描述了道路网眼的形状特征ꎬ但由于城市道路网眼形态多样ꎬ难以确定每个指标的阈值ꎬ需要自动综合多个指标对道路网眼进行识别[12]ꎮ本文使用自组织映射网络(SOM)来识别道路网眼的种类ꎮ首先人工选取K个具有代表性的道路网眼的几何形态指标构建向量集输入SOM开始训练ꎬ使相似的道路网眼映射到相同或相近的神经元中ꎬ得到SOM道路网眼识别模型ꎮ在此模型基础上进行道路网眼识别时ꎬ仅需输入道路网眼的几何形态指标到SOM中获取其在输出节点上的位置ꎬ与训练样本网眼所对应的输出节点位置进行比较ꎬ即可得到识别结果ꎮSOM的训练是调整网络各节点的权值以使不同节点对特定的输入模式敏感的过程ꎮ确定合适的网络结构㊁神经元权重初值等有利于提高SOM的训练速度和结果精度ꎮ2.1.1㊀网络结构的确定网络输出层神经元数量设定和训练集样本的类别数有关ꎮ神经元数不能小于类别数ꎬ否则会将相似的模式归为一类ꎬ无法识别出全部类别ꎻ神经元数目过多会产生训练过程中权值从未得到调整的 死节点 ꎬ增加计算时间ꎬ并且容易分类过细影响结果精度ꎮ82㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀测绘与空间地理信息㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀2018年一般输出层神经元数目需要在满足SOM神经网络结构模型的原则基础上经过多次实验确定[13-15]ꎬ本文使用文献[16]的方法来确定输出层神经元数目:M=C+0.7N0+α(6)式中ꎬC为输入样本的类别数(聚类数)ꎻN0位初始邻域ꎬ取为与输入样本的类别数最接近的平方数ꎻα为修正系数ꎬ0<α<Cꎮ2.1.2㊀神经元初始权值的设计网络权值初值的设定会影响网络运行的效率和结果的精度ꎬ若权重初始值和样本相近ꎬ可减少网络训练的次数ꎬ减小训练过程中权值的震荡ꎮ传统方法将网络神经元权值初始化为小随机数ꎬ这样有可能会出现 死节点 ꎮ本文使用样本的中心向量加小随机数作为神经元初始权值ꎬ使权值的初始位置与输入样本的大概分布区域重合ꎮ计算如式(7)所示ꎮWi=1pðKk=1Xp+β(7)式中ꎬN为样本数ꎬXp为第p个样本的输入向量ꎬβ为一小随机数ꎮ2.2㊀道路网眼识别策略SOM识别出的道路网眼考虑了几何层面的形态特征ꎬ但未涉及拓扑层面的道路间的空间关系ꎬ提取出的网眼可以确定目标位置但不包含全部路段ꎬ需要补全ꎮ针对多行道道路ꎬ将多行道网眼的长边存为多行道道路并将其作为种子路段ꎬ搜索研究区道路网中和种子路段端点相接并且夹角大于150ʎ的路段ꎬ若搜索到的路段一定距离缓冲区内有其他路段长度80%以上存在ꎬ则该路段被标记为多行道道路并添加到种子路段中ꎬ继续进行搜寻ꎬ直到没有新的路段被搜索到为止ꎮ对于立交桥道路ꎬ因为立交桥网眼具有一定的面积ꎬ删去道路网眼中面积过大和过小的网眼ꎬ在删去错误识别网眼的同时又能保证立交桥的查全率ꎬ并以合适的缓冲距离建立缓冲区ꎬ缓冲区范围内的路段被标记为立交桥ꎮ3㊀实验与分析本文采用武汉市部分城市道路数据进行实验ꎮ该数据包含3318个路段ꎬ共28个立交桥ꎮ通过目视识别选择具有代表性的网眼作为样本ꎬ如图3所示ꎬ样本类别数为8ꎮ其中右侧上方3幅图中加粗部分为多行道网眼ꎬ中间3幅为立交桥结构网眼ꎬ下方两幅为排除参考网眼ꎮ图2㊀实验样本Fig.2㊀Experimentalsample不同网络节点数和初始权值的设置下实验结果见表2和表3ꎬ其中β1为(-0.05ꎬ0.05)的小随机数ꎬβ2为(-0.5ꎬ0.5)的小随机数ꎮ初始学习率为0.7ꎬ学习次数根据网络节点数的不同分别为2000㊁4500㊁8000㊁12500ꎮ表2㊀立交桥和多行道的正确率㊁查全率(%)Tab.2㊀Accuracyandrecalloftheidentificationof㊀㊀㊀㊀flyoversandmultiplelane(%)网络节点数初始权值1pðKk=1Xp+β1β11pðKk=1Xp+β2β21692.9/92.993.2/97.889.3/89.390.4/97.886.7/92.987.3/97.882.4/10087.3/97.83681.3/92.996.2/82.285.7/85.795.5/96.483.3/71.487.3/97.882.8/85.787.3/97.86490.0/64.392.9/92.290.5/67.990.4/93.988.5/82.190.4/93.995.5/75.095.5/78.110094.1/57.194.1/61.495.0/67.991.4/88.494.1/57.195.3/7393.8/53.691.8/93.3通过表2可以发现ꎬ当网络节点数为16时识别效果最好ꎬ与公式(6)计算结果相同ꎬ初始权值的设定采用中心向量加随机小数的形式ꎬ实验效果优于直接采用随机小数ꎬ随机小数的范围对实验结果影响较小ꎮ综合立交桥和多行道的识别结果ꎬ实验最终采用网络节点数16ꎬ初始权值设定为中心向量加(-0.05ꎬ0.05)的随机小数ꎬ实验结果如图4所示ꎬ其中黑色粗线圈出的部分是识别出的立交桥ꎬ线状加粗部分是识别出的多行道ꎮ错误的识别主要是由于在某些立交桥中ꎬ存在较为细长的网眼ꎬ和多行道网眼近似ꎬ在进行分类时可能会产生混淆ꎮ图3㊀实验结果Fig.3㊀Experimentalresult4㊀结束语本文计算道路网眼的形状描述指标ꎬ以此为输入通过SOM识别出城市道路网中的多行道和立交桥ꎬ该方法㊀㊀(下转第34页)92第10期张㊀圆等:使用自组织映射网络识别城市道路主要结构4㊀结束语地名是一种资源ꎬ而地名唯一标识码是地名资源的 身份证 ꎮ本文从地名的内在特征考虑ꎬ设计了一种地名唯一标识码编码方法ꎮ采用本文方法所生成的标识码ꎬ可实现以下目标:1)对海量地名数据资源进行统一编号ꎬ可规范地名的管理㊁更新及服务等工作ꎻ2)作为唯一关键字ꎬ可支撑开展地名建库工作ꎻ3)充当 桥梁 ꎬ可与地名对应的其他信息库关联ꎬ为用户决策汇集充足的信息ꎻ4)地名唯一标识码具有较好的稳定性ꎬ可以此为标识ꎬ为多源㊁异构环境下的地名数据整合及更新工作奠定基础ꎻ5)通过分析唯一标识码ꎬ可获取该地名丰富的信息供用户应用及决策ꎮ该方法的提出为海量地名数据资源的统一编号㊁规范管理提供了新思路ꎬ相关成果可用于海量㊁多源地名数据的建库㊁管理㊁整合㊁更新及服务等领域ꎮ参考文献:[1]㊀张红辉.多源网络地名数据动态整合方法研究[D].长沙:中南大学ꎬ2014.[2]㊀李金良ꎬ张雪英ꎬ樊晓春.汉语地名时空信息的一体化表达[J].地理与地理信息科学ꎬ2010ꎬ26(2):6-10. [3]㊀符浩军ꎬ刘静祯ꎬ向竹君.一种地名地理实体数据自动获取方法[J].地理信息世界ꎬ2016ꎬ23(6):73-76.[4]㊀刘东琴.地理实体数据库构建研究[D].济南:山东科技大学ꎬ2010.[5]㊀刘东琴.地名地理实体数据库的构建与应用[J].中国地名ꎬ2010(2):24-25.[6]㊀马德起ꎬ苏明跃ꎬ臧世阳.深度挖掘身份证号中隐藏的信息[J].电脑知识与技术ꎬ2007(17):1193-1194. [7]㊀杨东波ꎬ孙秀萍.数字资源唯一标识符发展述略[J].图书馆学研究ꎬ2014(4):45-48.[8]㊀朱少楠ꎬ张雪英ꎬ李明ꎬ等.基于行政隶属关系树状图的地名消歧方法[J].地理与地理信息科学ꎬ2013ꎬ29(3):39-42.[9]㊀民政部地名研究所.GB/T18521-2001ꎬ地名分类与类别代码编制规则[S].北京:中国标准出版社ꎬ2011. [10]㊀向隆刚ꎬ王德浩ꎬ龚健雅.大规模轨迹数据的Geohash编码组织及高效范围查询[J].武汉大学学报:信息科学版ꎬ2017ꎬ42(1):21-27.[11]㊀金安ꎬ陈承旗ꎬ宋树华ꎬ等.基于Geohash的面数据区域查询[J].地理与地理信息科学ꎬ2013ꎬ29(5):31-35. [12]㊀倪礼豪ꎬ刘延申ꎬ刘怡ꎬ等.一种轻量级高效的位置服务隐私保护模型[J].计算机应用研究ꎬ2016ꎬ33(8):2386-2390.[13]㊀张锦鹏ꎬ程明ꎬ王俊山.基于FPGA的18b20的CRC校验码的并行算法及实现[J].计算机与数字工程ꎬ2011ꎬ39(4):44-46.[编辑:任亚茹](上接第29页)可同时识别立交桥和多行道并且具有较高的正确率ꎮ因为输入是单个道路网眼而不是特殊结构的道路组合ꎬ所以可识别非典型的立交桥结构ꎮ但是由于城市道路网复杂ꎬ部分网眼不易被区分ꎬ可能会错误识别一些道路结构ꎮ进一步的研究针对SOM可高效聚类这一性质ꎬ对道路网进行其他抽象并使用SOM来提取道路网中的更多信息ꎮ参考文献:[1]㊀李德仁ꎬ李清泉ꎬ杨必胜ꎬ等.3S技术与智能交通[J].武汉大学学报:信息科学版ꎬ2008ꎬ33(4):332-336. [2]㊀李清泉ꎬ萧世伦ꎬ方志祥ꎬ等.交通地理信息系统技术与前沿发展[M].北京:科学出版社ꎬ2012. [3]㊀WilliamAMackanessꎬGordonAMackechnie.AutomatingtheDetectionandSimplificationofJunctionsinRoadNet ̄works[J].GeoInformaticaꎬ1999ꎬ3(2):185-200. [4]㊀GuilaumeTouya.ARoadNetworkSelectionProcessBasedonDataEnrichmentandStructureDetection[J].Transac ̄tionsinGISꎬ2010ꎬ14(5):595-614.[5]㊀BishengYangꎬXuechenLuanꎬQingquanLi.Generatinghierarchicalstrokesfromurbanstreetnetworksbasedonspatialpatternrecognition[J].InternationalJournalofGe ̄ographicalInformationScienceꎬ2011ꎬ25(12):2025-2049.[6]㊀徐柱ꎬ蒙燕姿ꎬ李志林ꎬ等.基于有向属性关系图的典型道路交叉口结构识别方法[J].测绘学报ꎬ2011ꎬ40(1):125-130.[7]㊀王骁ꎬ钱海忠ꎬ丁雅莉ꎬ等.采用拓扑关系与道路分类的立交桥整体识别方法[J].测绘科学技术学报ꎬ2013ꎬ30(3):324-328.[8]㊀张浩ꎬ武芳ꎬ张俊涛ꎬ等.顾及形态特征和语义信息的双线道路识别方法[J].测绘科学技术学报ꎬ2016ꎬ33(3):301-312.[9]㊀TKohonen.Theself-organizingmap[J].Neurocomputingꎬ1990ꎬ21(1-3):1-6.[10]㊀吴怡ꎬ杨琼ꎬ吴庆祥ꎬ等.基于自组织映射神经网络的VANET组网算法[J].通信学报ꎬ2011ꎬ32(12):136-144.[11]㊀胡云岗ꎬ陈军ꎬ李志林ꎬ等.基于网眼密度的道路选取方法[J].测绘学报ꎬ2007ꎬ36(3):351-357.[12]㊀栾学晨ꎬ范红超ꎬ杨必胜ꎬ等.城市道路网主干道提取的形态分析方法[J].武汉大学学报:信息科学版ꎬ2014ꎬ39(3):327-331.[13]㊀BinJiangꎬLarsHarrie.SelectionofStreetsfromaNetworkUsingSelf-OrganizingMaps[J].TransactionsinGISꎬ2010ꎬ8(3):335-350.[14]㊀程博艳.基于神经网络的地图建筑物要素智能综合研究[D].成都:电子科技大学ꎬ2009.[15]㊀刘艳ꎬ陈丽安.基于SOM的真空断路器机械故障诊断[J].电工技术学报ꎬ2017ꎬ32(5):49-52.[16]㊀梁斌梅.自组织特征映射神经网络的改进及应用研究[J].计算机工程与应用ꎬ2009ꎬ45(31):134-137.[编辑:任亚茹]43㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀测绘与空间地理信息㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀2018年。