基于蒙特卡罗法的卷板机误差分析_董梅
基于蒙特卡罗方法的圆度测量不确定度评定

国计量出版社,2004(4). [6]苏金明,阮沈勇.M丑tlab实用教程[M].北京:电子工业出
一0.0即 145
O.0鹧 拗 一0.9卯 筋 一0.166
由以上测量数据得,距离圆心的最远和最近的
点分别为第13个点和第23个点。代入式(1)得圆
度误差为
,=6.099l舯
4.3不确定度估计
(1)应用式(2)评定圆度测量不确定度
根据以上数据和3.1部分公式得各点的不确定
度和传递系数,然后代入式(2)得 uf=O.2478舯
个概率分布,判断其分布类型,求出其方差,即为所 要求的圆度误差测量的标准不确定度。
4实例分析
在Tal舢d 365型圆度仪上对某工件的圆截面
进行测量和评定。 4.1不确定度来源分析 圆度仪有工作台旋转型和轴旋转型两种类型,
本次试验采用的啊yrond 365型圆度仪是工作台旋 转型的,该仪器处于良好的工作状态,温度和湿度恒 定,忽略环境对其的影响。其测量不确定度来源[5]
组数据的期望和方差值,即为圆度测量的圆度误差和 标准不确定度。求得厂=6.09呻咖,nf-0.24黜肌。
图l圆度误差的概率分布 (3)结果比较
传统方法 蒙特书罗方法
圆度误差 6.099l 6.0990
圆度测量的不确定度
O.2478
O.獬
由上表可知,蒙特卡罗方法可用于不确定度评 定,并且完全满足精度要求。
5结语
本文提出的蒙特卡罗方法来计算圆度误差的不 确定度,其结果和传统方法评定的结果相同,符合要 求。这种方法使用起来计算简便,借助于计算机软件 很容易实现,简化了传统方法的不确定度评定,可以 推广到形位误差的不确定度评定上,具有实用价值。
清华大学电力系统不确定性分析-----05蒙特卡罗模拟法_108801540

例题——利用变换方法生成标准 正态分布的随机变量
设对随机数 U1,U2 做下列变换:
N1 2 ln U 1 cos 2U 2 N 2 2 ln U 1 sin 2U 2
证明 N1, N2 为相互独立的服从 N(0, 1)分布的随机变量。
u1 1 2 n1 exp n12 n2 n1 2 u2 1 n 2 2 2 n1 2 n1 n2
舍选抽样方法
根据满足一定的检验条件进行舍选,以得到所需随机 变量的抽样值
设随机变量 η的密度函数 f x 可以表示 为 f x L
h x
g x, y dy
产生随机数(x,y)
其中 g x, y 是随机变量 X , Y 的联合密 度函数, h x 在 Y 的定义域上取常值,L 为一常量。则随机变量η的抽样过程为:
9
蒙特卡洛法的一般性原理
确定性问题
y
1
在正方形 0 x 1 , 0 y 1 中随机地均匀地 投掷一点(ξ,η),试求该点落在曲线 y f ( x) 下的
y=f(x)
概率 p。用 S 表示曲线 y f ( x) 下的区域;设ξ和η
S
相互独立,在[0,1]上满足均匀分布。于是有
dx 1
成立,其中α为置信度,1-α为置信水平。于是,可以根据问题的要求确定出 置信水平,按照正态分布表确定 cα,从而得到估计 GN 与真值 G 之间的误差
GN G
15
c N
蒙特卡洛模拟法计算指标的收敛过程示例
失稳概率 0.06 0.05 0.04 0.03 0.02 0.01 0 0
求出π值
蒙特卡洛法评定测量不确定度及其应用
蒙特卡洛法评定测量不确定度及其结果的应用铁科院标准计量研究所王彦春2013年7月18日测量不确定度的来源❖与误差的来源相同,共5个主要方面⏹测量设备(标准器;2.配套设备)⏹测量方法⏹被测量⏹影响量⏹人员(操作、读数、数据修约等)产生不确定度的原因❖被测量的定义不完整;(被测对象、方法、影响量)❖复现被测量的测量方法不理想;(方法)❖测量方法和测量程序中的近似和假设;(方法)❖取样的代表性不够,即被测样本不能代表所定义的被测量;(被测对象)❖测量仪器的计量性能(如最大允许误差、灵敏度、鉴别力、分辨力、死区及稳定性等)的局限性导的不确定度,即仪器的不确定度;(设备)❖测量标准或标准物质提供的量值的不确定度;(设备)❖对测量过程受环境影响的认识不恰如其分或对环境的测量与控制不完善;(影响量)❖引用的数据或其他参量的不确定度;(影响量)❖对模拟式仪器的读数存在人为偏移;(人员)❖在相同条件下重复观测中测得的量值的变化。
(重复性)测量不确定度的来源必须根据实际测量情况进行具体分析。
测量不确定度的来源❖区分两大类来源⏹随机因素:使测量结果呈现分散性,即分散性(分散区间,宽度取决于随机因素的影响程度)⏹系统因素:使测量结果呈现未知性,即不可知性(区间移动,区间偏离参考值的远近取决于系统因素的影响程度)以上两者共同导致测量结果的不确定度性,共同构成最终不确定度的区间测量不确定度的评定方法❖基于误差传播的评定方法(JJF 1059.1-2012,GUM法)不适用范围:⏹输入量概率分布不对称;⏹不能假设输出量的概率分布近似为正态分布或t分布;⏹测量模型不能用线性模型近似或求灵敏系数很困难;⏹被测量估计值与其标准不确定度大小相当时。
❖基于模拟试验的评定方法(JJF 1059.2-2012,MCM法,即蒙特卡洛法):属万能型方法❖GUM方法的评定结果的合理性可用MCM法进行验证。
测量不确定度评定过程(MCM法)❖测量模型❖确定来源⏹应注意的问题:熟悉被评定项目,灵活运用;针对主要因素合理评定,不遗漏(输入量和重要影响量)、不重复。
基于蒙特卡罗法的镜头结构公差分析
械研究所。本人保证离所后,发表基于研究生工作的论文或使用本论文工作成果
时必须征得产权单位的同意,同意后发表的学术论文署名单位仍然为中科院西安
光学精密机械研究所。产权单位有权保留送交论文的复印件,允许论文被查阅和
借阅;产权单位可以公布论文的全部或部分内容,可以采用影印、缩印或其它复
制手段保存论文。
(保密的论文在解密后应遵守此规定)
中国科学院西安光学精密机槭研究所2013年5月researchonmontecarlotoleranceanalysisforlensoptomechanicaldesignbylinqinhongadissertationsubmittedtograduateuniversityofchineseacademyofsciencesinpartialfulfillmentoftherequirementforthedegreeofmasterofengineeringxiinstituteofopticsandprecisionmechanicschineseacademyofsciences52013科研道德声明秉承研究所严谨的学风与优良的科学道德本人声明所呈交的论文是我个人在导师指导下进行的研究工作及取得的研究成果
密级:
硕士学位论文
基于蒙特卡罗法的镜头结构公差分析
作者姓名 指导教师: 学位类别: 学科专业: 研究所:
林钦鸿 达争尚 研究员
工学硕士 光学工程 中国科学院西安光学精密机械研究所
2013 年 5 月
Research on Monte Carlo tolerance analysis for lens opto-mechanical design
Master of Engineering
应用MECLOR对严重事故实验Phebus FPT3的模拟分析
蒙特卡洛方法在坦克火控系统误差分析中的应用
蒙特卡洛方法在坦克火控系统误差分析中的应用王东;陈晚如;杜宏;马骁【摘要】影响坦克火控系统总体精度的误差源众多,且各误差源误差值随着时间的推移呈现随机分布.为了找出各误差源的误差值与系统总误差的关系,及所谓的误差传递关系,应用蒙特卡洛法建立了火控系统的误差分析数学模型.应用该模型模拟仿真实际射击,得到了火控系统输入量误差与输出量误差之间的传递关系,结果表明输入量误差对高低分量的影响大于水平分量,从而找到影响射击精度的主要误差源.【期刊名称】《车辆与动力技术》【年(卷),期】2017(000)003【总页数】4页(P36-39)【关键词】火控系统;误差分析;蒙特卡洛法;圆概率偏差【作者】王东;陈晚如;杜宏;马骁【作者单位】中国人民解放军驻201所军代室,北京100072;中国北方车辆研究所,北京100072;中国北方车辆研究所,北京100072;中国北方车辆研究所,北京100072【正文语种】中文【中图分类】TJ81+0.376;TJ81+0.1Abstract:There are many sources of input error affecting t he tanker′s fire control system′s total precision, and the input errors present random distribution over time. In order to find out the relationship between inputerrors and the total system error, which is called error transfer relation,the total fire control system error analysis mathematical model is established by using the Carlo method. It can simulate actual shooting to obtain the error transfer relation between inputs and outputs. The result shows that the vertical input error affects more than the horizontal input error and can be rergarded as the primary error source which influences the shooting precision.Key words: fire control system; error analysis; Monte Carlo method; circle probable error误差分析是对火控系统的精度进行合理分配的前提, 其主要工作就是全面、合理地分析整个系统的误差源, 并找出各误差源与系统总误差的关系, 即所谓的误差传递关系.然后,对偏离目标产生的原因、后果及发生的阶段进行分析,找出主要的误差源,把误差减少到最低限度.由于坦克火控系统包含的分系统、部件或元器件很多, 所以影响火控系统总体精度的误差源很多, 且各误差源误差值随着时间的推移是随机的,服从一定的概率统计分布.因此, 火控系统的误差分析是一个繁杂的、反复的过程.蒙特卡洛方法[1]又称“统计试验法”,是一种解算数学和物理问题的近似计算方法.该方法能够直接地反映被研究系统的随机性.徐卫良等作者利用蒙特卡洛技术模拟具有任意概率分布的原始误差,抽样计算机器人手部位姿误差数模[2];赵永涛等作者根据导航机器人的误差数学模型,利用蒙特卡洛方法对导航机器人的位姿精度进行了分析[3]. 本研究以某型坦克火控系统作为研究对象,应用蒙特卡洛方法计算火控系统输出量标称值、输入量和输出量的抽样值,通过N次模拟得到瞄准点方位分量误差和高低分量误差的N个抽样值,最终得到平面坐标系中的圆概率偏差,从而找到影响射击精度的主要误差源.蒙特卡洛法(Monte Carlo Method)是一种通过随机变量的统计实验、求解工程技术问题近似解的数值方法.下面应用蒙特卡洛方法对影响火控系统的射击精度进行分析,并建立火控系统误差计算数学模型.火控系统误差的计算在二维平面内进行.设在平面坐标系统中瞄准点的方位或高低量为y;火控系统的n维输入参数向量为x1,x2,…,xn,它们之间的函数关系可以表示为若综合火控系统输入参数不存在误差,那么根据系统输入量的标称值,可计算得到系统输出量的标称值y0=f(x10,x20,…,xn0),其中,x10,x20,…,xn0为综合火控系统n维输入参数向量的标称值.在实际综合火控系统中,输入量是由各个有关的传感器提供的.由于各种随机因素的影响,n维输入向量X带有误差,而误差分析的目的就是分析计算各个输入量误差对综合火控系统输出的影响,即求解在存在输入误差的条件下,系统输出的误差.一般输入量可用公式(2)来描述.式中:xi0为第i个输入量的标称值;△xi为第i个输入量的随机误差;i=1,2,…,n.根据中心极限定理,工程上可将随机误差△xi处理为正态随机变量,即式中:μi为第i个输入量随机误差的均值;σi为第i个输入量随机误差的均方差. 因此,当综合火控系统输入参数存在误差时,系统的第k次模拟产生的实际输出为式中:k=1,2,…,n.Xk=(x1k,x2k,…,xnk)表示第k次模拟产生的输入随机向量;ΔXk=(△x1k,△x2k,…,△xnk)为第k次模拟产生的输入随机误差向量.系统第k次模拟产生的输出误差为:式中:y0为系统输出量的标称值;yk为考虑所有误差源后系统的第k次模拟输出量.这样,通过n次模拟,就可以得到系统输出误差的n个抽样值:按照上述方法,通过n次模拟,可以得到瞄准点方位分量误差和高低分量误差的n 个抽样值:式中:ΔFWk为第k次模拟产生的瞄准点方位分量误差;ΔGDk为第k次模拟产生的瞄准点高低分量误差;k=1,2,…,n.根据数理统计和概率论知识,可得到瞄准点方位分量误差的均值E(ΔFW)和高低分量误差的均方差E(ΔGD).则瞄准点方位分量误差的均方差(Root-Mean-Square,简称RMS) RMS(ΔFW)和高低分量误差的均方差RMS(ΔGD)为:综合火控系统的精度指标之一圆概率偏差,其定义为:在平面坐标系内,以瞄准点方位和高低分量的标称值(或平均瞄准点)为中心、以R为半径的一个圆.如果瞄准点二维随机变量出现在该圆中的概率为50%,则称此圆的半径R为概率偏差,记作RCEP.瞄准点脱靶量是标称瞄准点与实际瞄准点之间的距离.第k次模拟产生的瞄准点脱靶量计算模型为:通过n次模拟,可以得到瞄准点脱靶量的n个抽样值:{Δ1,Δ2,…,Δk}(k=1,2,…,n).首先将瞄准点脱靶量按从小到大排列所有的仿真结果,得到瞄准点脱靶序列:则当n为偶数时,当n为奇数时,式中:i为按脱靶量Δi增加顺序排列时的脱靶量编号.坦克火控系统射击过程依次为瞄准、跟踪、解算、调炮、击发和验靶.其组成包括目标观瞄子系统、火控计算机子系统和火炮控制子系统[2].坦克火控系统的各误差源误差值随着时间的推移是随机的,服从一定的概率统计分布,图1是在MATLAB/Simulink中搭建的火控系统误差仿真模型.该模型包含火控系统的所有输入源及引入误差环节,能够反映出误差对精度的传递关系.由图1可见火控系统的误差源包括以下三部分:1)目标观瞄子系统中的误差源主要有:测量目标距离、高低角和方位角的3个传感器;目标跟踪误差,目标状态预测误差,瞄准线稳定和漂移误差,机动目标模型误差,等等.2)火控计算机子系统中的误差源主要有:由于横风风速对弹丸的飞行影响很大,所以横风传感器是弹道解算阶段的主要误差源.另外,药温偏差、炮膛磨损、弹重、装药量,还有环境因素包括气温、气压、横风和地形,射弹散布,弹道解算模型及修正误差,等等.3)炮控子系统中的误差源主要有:火炮零位测量误差、火炮位置测量误差、火炮稳定误差、火炮身管变形.设定仿真条件如下:目标距离为1 800 m,药温为21 ℃,气温为15 ℃,气压为一个标准大气压.取仿真次数为3 000次.分别考虑如下两种情况:1)火控计算机子系统输入误差分析,即只考虑火控计算机子系统输入量引入的误差;2)坦克火控系统总输入量误差的分析,即目标观瞄子系统、火控计算机子系统和炮控子系统所有误差源对瞄准点精度的影响.在MATLAB/Simulink中分别就以上两种情况进行仿真计算,得到瞄准点位置.瞄准点位置的分布图如图2和图3所示.同时得到瞄准点方位分类误差E(ΔFW)、瞄准点高低分量误差E(ΔGD)、瞄准点脱靶量最小值和最大值、以及瞄准点方位分量和高低分量的均方差RMS、最后得到瞄准点分布的圆概率偏差RCEP.各项数据见表1.从表1中各项数据可知,当只考虑火控计算机子系统输入量误差时,瞄准点方位分量误差和高低分量误差均较小.而考虑整个火控系统输入误差时,瞄准点高低分量误差增大了3.29倍,水平分量误差增大了1.3倍.同时当只考虑火控计算机子系统误差输入时,瞄准点以50%的概率分布在半径为0.084的圆内;考虑坦克火控系统整体误差输入时,圆的半径增大为0.241,圆概率偏差RCEP增大了2.87倍.由此可以得出,目标观瞄子系统和炮控子系统的误差输入量对高低分量的影响要大于水平分量,应该把减小目标观瞄子系统和炮控子系统高低分量误差作为提高火控系统精度的一个重点研究方向.某次实弹动对动射击试验,车速保持在20 km/h左右,一共发射了9发弹,图4为弹着点分布图.此时影响射击精度的误差源增加了很多,包括车体的振动、炮口的振动等因素.经计算得到圆概率偏差RCEP为0.861 0,方位向的偏差均方差为0.590 1,高低向的偏差均方差为0.938 2,显然弹着点在高低方向的偏差要大于方位向的偏差,所以要将减小高低分量误差作为提高火控系统精度的一个重点研究方向.这与上面的仿真结果一致.以某型坦克火控系统作为研究对象,应用蒙特卡洛方法计算了火控系统输出标称值、输入量和输出量的抽样值,通过N次模拟得到了瞄准点方位分量误差和高低分量误差的N个抽样值,最终得到了平面坐标系中的圆概率偏差,从而可以方便地找到影响射击精度的主要误差源.通过研究得到以下结论:1)采用“蒙特卡洛”随机模拟法,模拟实际的坦克火力控制系统的各个误差源及其传递的关系,提供了一种利用计算机仿真来分析各误差源对火控系统精度影响敏感程度的方法.2)得出的部分误差源的仿真结果与实际测试结果一致,其变化趋势对于改进误差源是很有参考意义的,甚至可以对单个传感器的误差进行评价,得到其贡献值,从而指导传感器的改进,达到效果和成本的最佳.3)利用蒙特卡洛方法,得到各误差源对系统总误差的权系数,再应用最优或专家系统的方法就可以得到火控系统的精度分析方案,可以很好地指导实际工作.通过这样的仿真试验,可以得到各个子系统对精度的贡献值,指导系统指标分配.【相关文献】[1] 裴鹿成,王仲奇.蒙特卡洛方法及其应用[M]. 北京:海洋出版社:1993-1997.[2] 徐卫良,张启先. 机器人误差分析的蒙特卡洛方法[J]. 机器人,1988,(4):3-8.[3] 赵永涛,王田苗,孙磊. 基于蒙特卡洛方法的导航机器人的误差分析[J]. 航空制造技术,2004,(3):52-54.。
基于模糊_PID复合控制算法的电机转速控制

能进行在线调整等缺点, 对于模型不精确、结构非线 性的对象, 很难取得满意的控制效果。 2. 2 模糊控制算法
模糊控制是模仿人的一种控制方法。它的特点 是: 无需建立被控对象的数学模型, 对被控对象的时 滞、非线性和时变 性具有较强的 适应能力 [ 3 ] , 与常 规控制器不同, 模糊控制本质上是一种非线性控制, 对控制对象的参数变化或非线性特性具有较好的适 应能力, 对干扰或噪声具有更强的抑制功能。模糊 控制的不足之处在于其本身消除系统稳态误差的性 能比较差, 难以达到较高的控制精度。将模糊控制 策略直接用于电机的速度控制往往得不到好的控制 效果 [ 4] 。 2. 3 模糊 - P ID复合控制算法
正中 ( PM ) 和正大 ( PB ) 。速度误差 E、误差变化量
EC 及控制量变化 U 的模糊子集均为 {N B, NM, N S,
ZE, PS, PM, PB}, 语言变量论域上的模糊子集由三
角形隶属度函数描述。
所用的控制策略为: 当速度误差 E 为正大 ( PB) 时, 如果误差变化 EC 也为正大 ( PB) , 表明误差正在 不断增大, 为迅速使误差 减小, 应尽 快减少控制量 ( NB ); 如果误差变化为负小 ( NS) , 即误差已在慢慢 减小, 因此, 应适当减小控制量 ( NM )。如果此时误 差正在快速减小, 即误差变化为负大 ( NB ) 。为防止 超调, 控制量暂时不需变化, 故 U 应为零 ( ZE ) 。当 系统接近于稳态, 误差是 PS、ZE 或 NS时, 除了要消
系统控制量 U 的比例因子
Ku =
uH - uL 2n
( 4)
设输出控制量 在离散 论域 上的整 数值为 y
[ - n, n], 则控制量在连续论域上的值为
期权定价的Monte Carlo模拟精度改进技术及其R软件实现
期权定价的Monte Carlo模拟精度改进技术及其R软件实现作者:熊炳忠来源:《电脑知识与技术》2017年第04期摘要:提高模拟精度是蒙特卡洛模拟应用于解决实际问题的关键。
在介绍对偶变量法、控制变量法、重要抽样技术以及分层抽样法的基本原理基础上,将这四种精度提高技术应用于标准欧式期权的模拟定价,基于R软件平台给出它们的实现程序,对比这些方法与普通蒙特卡洛模拟方法所给出期权定价的精度提高效果,结果表明它们都有较好的提高精度效果,尤其是分层抽样法,精度可以达到一般蒙特卡洛模拟精度的5倍之多。
关键词:期权定价;Monte Carlo模拟;精度改进;R软件中图分类号:TP311 文献标识码:A 文章编号:1009-3044(2017)04-0244-03Precision Improvement Techniques of Monte Carlo Simulation and Implementation by R in Options PricingXIONG Bing-zhong(College of Nanhu, Jiaxing University, Jiaxing 314001,China)Abstract: The key point to applying Monte Carlo simulation to solve practical problems is to improve the simulation accuracy. Based on the rational of dual variable method, control variable method, importance sampling technique and stratified sampling method, we apply the 4 techniques to the standard pricing of European options with their implementations programmed by the R. The results show that these techniques can all improve the accuracy in option pricing compared with the general Monte Carlo simulation. Especially the simulation of stratified sampling whose precision is 5 times as much as the general Monte Carlo’s.Key words: Option Pricing; Monte Carlo Simulation; Precision Improvement; R Software1 概述由于期权既是高效的风险对冲工具又是高效的投资工具,在现代金融市场中其越来越受到广大投资者的青睐。
基于MATLAB_GUI的自动控制原理仿真实验平台设计
D O I :10.3969/j.i s s n .1001-5337.2024.2.125 收稿日期:2022-11-27基金项目:国家自然科学基金(51705286);山东省研究生教育教学改革研究(S D Y J G 21031);曲阜师范大学校级教改实验项目(S J G 202220).通信作者:陈梅,女,1975-,硕士,讲师;研究方向:控制系统仿真,图像处理;E -m a i l :c h e n m e i w j@126.c o m.基于M A T L A B G U I 的自动控制原理仿真实验平台设计陈 梅, 费玉环(曲阜师范大学工学院,276826,山东省日照市) 摘要:为满足自动控制原理课程线上线下混合式教学的需要,通过MA T L A B G U I 编程设计了自动控制原理实验仿真平台.该仿真平台包括了6个基础实验和4个综合实验,从时域㊁频域㊁根轨迹及状态空间对系统进行分析,并对系统进行了P I D 整定㊁根轨迹及频域法校正,可获得系统的时域㊁频域及根轨迹性能参数及图形.控制系统参数的自动获取及直观的图形显示,使学生更好理解控制系统的原理,有助于提高学生的控制系统设计及应用能力.关键词:MA T A L B G U I;自动控制原理;仿真实验平台;性能参数中图分类号:T P 391.9 文献标识码:A 文章编号:1001-5337(2024)02-0125-040 引 言自动控制原理 是自动化专业的核心课程,自动控制原理包括对控制系统的时域㊁频域㊁根轨迹分析及设计.随着软件开发在教学中的使用,自动控制原理相关仿真系统开发软件越来越多,比如控制系统的二阶R L C 振荡电路的仿真系统[1,2],P I D 控制系统仿真[3,4],系统稳定性分析的仿真软件[5].由于MA T L A B 具有强大的数据处理及图形可视化功能,其在课程仿真中的应用越来越多.为满足自动控制原理课程线上线下混合式教学的需要,通过MA T L A B G U I 编程实现了仿真实验演示平台.该实验平台包含了10个仿真实验,其直观的图形显示,以及便捷的数据处理,可使学生更好理解自动控制原理的内容.1 实验平台设计思路根据自动控制原理实验的内容[6],该实验仿真平台设计了10个实验项目,其中包括6个基本实验:控制系统典型环节的表示及分析㊁控制系统的时域分析㊁频域分析㊁根轨迹分析㊁P I D 控制分析及线性系统的状态空间分析,4个综合实验:控制系统的P I D 参数整定㊁频域法校正㊁根轨迹法校正及倒立摆系统的分析与设计.仿真平台的功能框图如图1所示.图1 仿真实验平台功能框图第50卷 第2期2024年4月 曲阜师范大学学报J o u r n a l o f Q u f u N o r m a l U n i v e r s i t yV o l .50 N o .2A p r .2024(1)控制系统典型环节表示与分析.典型环节主要包括比例环节㊁积分环节㊁一阶惯性环节㊁实际微分环节㊁二阶振荡环节及延迟环节6种.该实验实现了典型控制系统的数学模型表示,并绘制了各系统的单位阶跃响应曲线,同时对系统性能进行了分析.(2)控制系统的时域分析.该实验让学生了解不同输入信号下的系统响应曲线,并掌握单位阶跃响应的动态性能指标.输入信号包括单位阶跃㊁单位脉冲㊁单位斜坡㊁单位加速度㊁及正弦信号,动态性能指标包括上升时间t r㊁峰值时间t p㊁超调量σ㊁调节时间t s及稳态误差e s s.(3)控制系统的频域分析.该实验主要包括系统频域图形绘制及频域参数求解.频域图形包括B o d e 图㊁N y q u i s t图及N i c h o l s曲线,系统频域参数包括增益裕量G m㊁相角裕量P m㊁穿越频率ωc g及剪切频率ωc p.(4)控制系统的根轨迹分析.该实验包括系统根轨迹绘制,以及求解系统的临界开环增益K及稳定增益范围.(5)P I D控制系统分析.该实验可以设置不同P I D参数,通过单位阶跃响应曲线及动态性能指标,使学生掌握P㊁P I㊁P I D等不同控制及参数,对系统性能的影响.(6)线性系统的状态空间分析.该实验可以对线性系统可观可控分析;确定系统极点配置的状态反馈矩阵及反馈系统;确定状态观测器反馈矩阵及状态观测器设计.(7)控制系统的P I D参数整定.该实验让学生掌握临界比例度法及4ʒ1衰减曲线法2种常用的P I D参数整定方法,以及P㊁P I及P I D控制参数的求解.(8)控制系统的频域法校正.频域法校正包括超前㊁滞后㊁滞后超前3种校正方法.通过设置需要校正的参数静态误差系数K v㊁相角裕度γ及剪切频率ωc,来确定校正器的参数,并通过校正前㊁后的时域及频域参数来验证校正后系统性能的改善.(9)控制系统的根轨迹法校正.根轨迹校正包括超前㊁滞后㊁超前滞后3种校正方式.通过设置时域参数超调量σ及调节时t s;或频域参数阻尼比ζ及角频率ωn,来确定校正系统的参数,并通过校正前后的时域参数对比来验证校正后系统性能是否满足要求.(10)倒立摆系统的分析与设计.该实验让学生了解倒立摆系统的工作原理,以及对倒立摆的控制.通过设置倒立摆参数,可以确定状态方程及输出方程,并通过极点配置及P I D参数整定对系统进行控制.该仿真实验平台的界面的设计及功能编程是通过MA T L A B G U I设计实现的.界面的设计通过G U I D E图形用户接口开发环境实现[7].在MA T-L A B2018的命令窗口中键入 g u i d e 打开G U I D E,通过添加控件分别设计各界面,界面设计的文件名扩展名为.f i g;然后编辑对应的M文件,通过各界面控件的C a l l b a c k函数实现控件的功能.2实验平台的功能实现2.1仿真系统界面设计该仿真系统包括1个主界面和10个子界面,主界面中主要包括10个按钮,用来显示各实验子界面.下面以 控制系统根轨迹校正 实验为例说明各子界面的设计过程.根轨迹校正实验子界面中主要包括系统参数设置㊁校正参数设置㊁校正系统获取㊁系统性能参数的求解㊁校正前后根轨迹及单位阶跃响应曲线的绘制5个模块.仿真界面通过MA T L A B G U I设计,通过添加各控件实现,界面设计如图2所示.图2根轨迹法校正界面2.2实验平台功能实现2.2.1系统参数设置控制系统参数设置形式为传递函数形式,通过在编辑框中输入分子n u m㊁分母d e n参数实现.使用g e t函数获取编辑框中的字符串,并通过s t r2n u m函数将字符串转换为数值,最后通过t f函数得到系统传递函数.621曲阜师范大学学报(自然科学版)2024年2.2.2校正参数设置根据根轨迹法校正设计要求[8],系统校正的参数设置包括静态误差系数K v㊁时域参数超调量σ和调节时间t s㊁频域参数阻尼比ζ和角频率ωn.设置时域参数或频率参数的选择通过单选按钮实现,两种形式的参数可以相互转换,主要实现代码如下.i f(g e t(h a n d l e s.r a d i o t i m e,'V a l u e'))%时域参数z e t e=((l o g(1/s i g m a))^2/((p i)^2+(l o g(1/ s i g m a))^2))^(1/2)%ζw n=3.5/(z e t e*t s)%ωne l s e%频域参数s i g m a=e x p(-p i*z e t e/s q r t(1-z e t e*z e t e)) *100t s=3.5/(z e t e*w n)2.2.3校正器参数根轨迹法校正包括超前㊁滞后㊁超前滞后3种校正方式,通过按钮实现选择,超前校正实现代码如下. k c=k v/n u m*d e n(l e n-1);g=p o l y v a l(n u m,s1)/p o l y v a l(d e n,s1);t h e t a_G=a n g l e(g);t h e t a_s=a n g l e(s1);MG=a b s(g);M s=a b s(s1);T z=(s i n(t h e t a_s)-k c*MG*s i n(t h e t a_G-t h e t a_s))/(k c*MG*M s*s i n(t h e t a_G))T p=-(k c*MG*s i n(t h e t a_s)+s i n(t h e t a_G +t h e t a_s))/(M s*s i n(t h e t a_G))G c1=t f([T z,1],[T p,1])%超前2.2.4校正系统动态性能参数校正后的系统开环传递函数是由原系统的开环传递函数G0(s)与校正器的传递函数G c(s)串联组成[9].为了验证校正系统是否满足要求,需要确定校正前后系统的性能参数,包括超调量σ㊁上升时间t r㊁调节时间t s,主要实现代码如下.[y,t]=s t e p(G G c);[m a x_y,k]=m a x(y);C=d c g a i n(G G c);m a x_o v e r s h o o t=(m a x_y-C)/C*100;s=l e n g t h(t);w h i l e y(s)>0.95*C&&y(s)<1.05*Ce n ds=s-1;t s=t(s)%调节时间2.2.5仿真曲线绘制为了更直观地比较系统校正前后的性能,绘制了其对应的单位阶跃响应曲线及根轨迹.使用s t e p 函数绘制单位阶跃响应曲线,使用r l o c u s函数绘制根轨迹曲线,坐标轴控件的设置通过a x e s函数实现. 3实验平台测试通过实例对实验平台的各项功能进行了测试.例控制系统的开环传递函数G(s)=8s2+0.4s,通过根轨迹校正,使系统满足静态误差系数为4,超调量为30%,调节时间为3.5s.根据校正要求,首先进行系统参数设置,输入分子n u m为8,分母d e n为[1,0.4,0].设置校正参数静态误差系数K v为4,选择时域参数单选按钮,并输入超调量σ为30,调节时间t s为3.5s.选择校正按钮后,系统开始校正,将求解的校正器参数及系统性能参数显示到对应的编辑框中.选择 超前校正 按钮,求得校正系统的传递函数为G C(s)=2.73s+10.51s+1,校正后的超调量为30%,上升时间为0.5s,调节时间为2.76s,满足设计要求.选择 滞后校正 按钮,求得校正系统的传递函数为G C(s)=0.215s+0.00215s+0.00215,校正后的超调量为60%,上升时间为0.94s,调节时间为13.4s,超调量及调节设计均不满足设计要求,不采用该校正方式.选择 超前滞后 校正按钮,求得校正系统的传递函数为G C(s)=0.49s+0.20.5s+1㊃0.66s+0.0066s+0.00656,校正后的超调量为21.8%,上升时间为0.69s,调节时间为2.3s,满足设计要求.超前滞后校正前后单位阶跃响应响应曲线如图3所示,根轨迹下页如图4所示.图3超前滞后校正前后单位阶跃响应曲线721第2期陈梅,等:基于MA T L A B G U I的自动控制原理仿真实验平台设计图4 超前滞后校正前后根轨迹4 结 论通过MA T L A B G U I 设计了自动控制原理实验仿真平台,实现了控制系统分析中的10个典型实验.该仿真系统数据获取方便,并且直观的图形显示有助于学生加深对控制系统的理解.教学实践表明,该实验平台操作方便,功能设计齐全,可用于自动控制原理课程的线下课堂演示教学和线上实验教学,使学生更牢固地掌握知识,同时有助于提高学生的编程设计能力和问题解决能力.参考文献:[1]马壮.基于M a t l a b 的典型二阶R L C 振荡电路实验教学仿真[J ].实验室研究与探索,2016,35(10):95-98.[2]王晨丰,赵鹏.基于M A T L A B L T I V i e w e r 工具箱的二阶系统阶跃响应分析[J ].电子测试,2020(8):57-59.[3]陈梅,王健.基于MA T L A B G U I 的P I D 控制仿真系统设计[J ].实验技术与管理,2020,28(2):140-143.[4]张婧,盖文东,徐文尚,等.基于M a t l a b 的P I D 控制器参数整定方法[J ].实验科学与技术,2016,14(4):37-40.[5]闫红梅,张鸣,李远征,等.基于M a t l a b 的系统稳定性分析实验设计[J ].实验技术与管理,2018,35(4):144-146.[6]胡寿松.自动控制原理[M ].6版.北京:科学出版社,2016.[7]张贤明.MA T L A B 语言及应用案例[M ].南京:东南大学出版社,2010.[8]王正林,王胜开,陈国顺,等.MA T L A B /S i m u l i n k 与控制系统仿真[M ].北京:电子工业出版社,2008.[9]张德丰.MA T L A B 控制系统设计与仿真[M ].北京:电子工业出版社,2009.D e s i g n o f a u t o m a t i c c o n t r o l p r i n c i p l e s i m u l a t i o n e x pe r i m e n t p l a tf o r m b a s e d o n M A T L A B G U IC H E N M e i , F E I Y u h u a n(C o l l e g e o f E n g i n e e r i n g ,Q u f u N o r m a l U n v e r s i t y ,276826,R i z h a o ,S h a n d o n g,P R C )A b s t r a c t :T o m e e t t h e n e e d s o f b l e n d e d o n l i n e a n d o f f l i n e t e a c h i n g o f a u t o m a t i c c o n t r o l p r i n c i pl e s ,t h e s i m u l a t i o n e x p e r i m e n t p l a t f o r m o f a u t o m a t i c c o n t r o l p r i n c i p l e i s d e s i g n e d t h r o u gh MA T L A B G U I p r o -g r a mm i n g .T h e s i m u l a t i o n p l a t f o r m i n c l u d e s 6b a s i c e x p e r i m e n t s a n d 4c o m p r e h e n s i v e e x p e r i m e n t s .I t a n -a l y z e s t h e s y s t e m f r o m t i m e d o m a i n ,f r e q u e n c y d o m a i n ,r o o t l o c u s a n d s t a t e s pa c e ,a n d c o n d u c t s P I D t u n -i n g ,r o o t l o c u s a n d f r e q u e n c y d o m a i n c o r r e c t i o n f o r t h e s y s t e m.T h e t i m e d o m a i n ,f r e q u e n c y do m a i n a n d r o o t l o c u s p e r f o r m a n c e p a r a m e t e r s a n d g r a p h s o f t h e s y s t e m c a n b e o b t a i n e d .T h e a u t o m a t i c a c q u i s i t i o n o f c o n t r o l s y s t e m p a r a m e t e r s a n d v i s u a l g r a p h i c d i s p l a y c o u l d h e l p s t u d e n t s t o b e t t e r u n d e r s t a n d t h e p r i n c i pl e o f t h e c o n t r o l s y s t e m ,e n h a n c e s t u d e n t s c o n t r o l s y s t e m d e s i g n a n d a p p l i c a t i o n a b i l i t y,a n d m e e t t h e r e -q u i r e m e n t s o f e x p e r i m e n t a l t e a c h i n g o b je c t i v e s .K e y wo r d s :MA T L A B G U I ;a u t o m a t i c c o n t r o l p r i n c i p l e ;s i m u l a t i o n e x p e r i m e n t p l a t f o r m ;p e r f o r m -a n c e p a r a m e t e r821 曲阜师范大学学报(自然科学版) 2024年。
失配误差的蒙特卡洛分析

失配误差的蒙特卡洛分析余清华;邱斌;高申翔;夏伟;丁风海;王琳娜【摘要】针对极限相位法评定失配误差引入的测量不确定度普遍偏大的问题,提出了采用蒙特卡洛法对其评定的新方法.以交替比较法校准功率座为实例,研究了蒙特卡洛法评定失配误差引入的测量不确定度的具体实现方法,并将其得到的结果与极限相位法进行比较.结果表明,蒙特卡洛法更适合用于失配误差引入的测量不确定度进行评定.【期刊名称】《计量学报》【年(卷),期】2015(036)001【总页数】5页(P92-96)【关键词】计量学;失配误差;极限相位法;蒙特卡洛法;不确定度【作者】余清华;邱斌;高申翔;夏伟;丁风海;王琳娜【作者单位】中国卫星海上测控部,江苏江阴214431;中国卫星海上测控部,江苏江阴214431;中国卫星海上测控部,江苏江阴214431;中国卫星海上测控部,江苏江阴214431;中国卫星海上测控部,江苏江阴214431;中国卫星海上测控部,江苏江阴214431【正文语种】中文【中图分类】TB973在高频和微波功率的测量和校准中,由于测量和校准系统的特性阻抗与被校功率座的输入特性阻抗不可能完全匹配,因此,失配误差无法避免,且失配误差通常是主要的误差来源[1]。
失配误差的表达式是复变量分式,计算非常复杂,常用的处理方法是忽略失配对测量结果的影响,只在测量结果不确定度评定时再将其引入,即通过极限相位关系估算其误差限(简称极限相位法),并默认其服从反正弦分布。
这样处理虽能严格满足不确定度评定的适用性,但无疑会使不确定度在一定程度上放大,从而导致仪器的测量能力得不到真正体现。
针对此问题,本文提出了采用蒙特卡洛法(MCM)对失配误差进行计算的新方法,将两种方法得到的失配误差进行比较,分析对测量结果不确定度的影响,并讨论采用蒙特卡洛法替代极限相位法的可行性。
本文将以交替比较法测量功率座校准因子过程中产生的失配误差为基础展开讨论分析。
交替比较法是利用高一级的标准功率座(已知校准因子)校准被校功率座,其原理框图如图1所示。
基于MEDA方法的维修差错分析范文
基于MEDA方法的维修差错分析范文第一篇:基于MEDA方法的维修差错分析范文基于MEDA方法的维修差错分析――民航飞行学院新津分院万军 611431摘要:本文介绍了美国波音公司开发的MEDA维修差错决断工具的理论、基本观点和分析方法,最后尝试用MEDA方法对某分院一起维修差错事件进行了分析。
关键词:MEDA维修差错航空安全事件调查引言MEDA(Maintenance Error Decision Aid)是由波音公司和FAA、美联航、大陆航等联合开发的一种致力于调查致错因素的维修差错决断方法。
同许多舶来品一样,MEDA方法在国内应用的不多,目前为止,仅有极少数国内的航空维修企业(如GAMECO、海南航空公司等)采用了MEDA。
在学院内部,尽管也有一些机务干部曾接受过这一方面的培训,但真正运用的不多;各维修单位对维修差错的调查和管理,仍然采用传统的经验和方法。
笔者撰写本文,希望能将MEDA方法进行一次较全面的介绍,为今后学院维修系统建立一套有效的规范的差错管理方法提供借鉴。
2 MEDA的三个基本原则采用MEDA方法对已发生的差错进行调查,对现行运行程序中可能导致差错的因素进行分析,目的是要在更大程度上预防和避免差错的发生。
其理论基础建立在以下三个原则之上:2.1 出现人为差错不是工作者的主观意愿。
维修人员都是专业人员,他们的职责是保证安全,主观上,他们不会故意制造差错,他们也不愿意发生差错。
事实上,绝大多数维修人员在出现差错之后都会十分后悔,甚至对自己当时所作的事情感到不可思议。
正因为人为差错是违背当事人的主观意愿而产生的,所以MEDA调查表中根本就不把产生差错的员工姓名作为一项调查内容,更不把责难和教训出错的员工作为一项改进措施。
MEDA认为直接工作的员工往往更清楚究竟问题出在哪里和如何改进,只有在不处罚员工的基础上,才能真正有效地调查出造成差错的原因和可行的改进措施。
2.2 人总是存在着一定的出错概率。
蒙特卡罗法分析GPS误差对火箭弹落点预测精度的影响
中国测试 CHINA MEASUREMENT & TEST
Vol.40 No.3 May,2014
doi院10.11857/j.issn.1674-5124.2014误差对火箭弹落点 预测精度的影响
田再克袁 杨锁昌袁 冯德龙袁 姚运志
(军械工程学院导弹工程系,河北 石家庄 050003)
摘 要院针对火箭弹在落点预测过程中 GPS 随机误差影响预测精度的情况,从理论和仿真实验上对该影响进行分析。
该文将 GPS 误差作为典型的随机过程,结合火箭弹动力学模型建立数学模型,并利用经典的统计试验法-蒙特卡罗分
两种情况进行弹道仿真实验,预测弹丸落点。仿真结果表明:在存在 GPS 误差的情况下弹道修正的精度大幅降低,因
此 GPS 误差是影响落点预测精度的重要因素。
关键词院蒙特卡罗法;落点预测;GPS 误差;火箭
中图分类号院P228.4曰TJ415曰YM930.115曰TP391.9
文献标志码院A
文章编号院1674-5124渊2014冤03-0117-04
Analysis on effect of GPS error on point prediction of rocket using Monte-Carlo method
收稿日期院2013-04-06曰收到修改稿日期院2013-06-08 作者简介:田再克(1987-),男,河北石家庄市人,硕士研究生, 专业方向为导航制导与测试。
中对这种随机误差建立一种数学模型,并将该数学 模型与弹丸动力学模型结合,采用蒙特卡罗方法进 行火箭弹落点预测模拟打靶试验,以弹丸落点模拟结 果的均值和方差反映实际射击过程中的预测特征, 以便分析 GPS 误差对火箭弹落点预测精度的影响。
基于蒙特卡洛法的并联机床误差分析

0 引言
[ ] 并联机床自 1 其较 传 统 机 9 9 4 年问世以来 1-3 ,
[ ] 煤矿机械 , ( ) : 法, 与有限元模态分析结果相互验证 , 得到更精确的 J . 2 0 0 7, 2 8 1 1 2 3-2 4. 固有频率 、 模态振型及系统阻尼系数 , 用于指导有限 元理论模型的修正 , 使计算模型更加完善 、 合理 。 参考文献 :
[ 1] 杨 献 辉 ,赵 俊 利 ,薛 雷 泽 ,等 .基 于 AN S Y S 的 ] 煤矿机械, S D L 1 6 4 5 1 圆周振动筛模态特性分析 [ J . - ( ) : 2 0 1 0, 3 1 6 7 4-7 6. [ ] 刘初升 . 超静定结构振动筛的设计与 动 态 特 性 2 闫俊霞 , 分析 [ ] 机械研究与应用 , ( ) : J . 2 0 1 1, 1 2 2-2 3. [ ] 3 2 Z K B振动筛的动态仿真及有限元分析[ D] . 张 浩. 邯郸 : 河北工程大学 , 2 0 1 1. [ ] 赵 爽. 4 HF Z S 1 6 4 0型 振 动 筛 强 度 的 优 化 设 计 方治华 , 《 机械与电子 》 ( ) 2 0 1 3 6 作者简介 : 王文云 ( , 男, 云 南 玉 溪 人, 硕 士 研 究 生, 1 9 8 8- )
·7 7·
经验交流
基于蒙特卡洛法的并联机床误差分析
床有着很大的优 越 性 。 但 是 , 并联机床的精度与高 精度的传统机床相比还有着一定的差距 。 目前工业 上对机床精度的要 求 越 来 越 高 , 所以降低并联机床 在 实 际 生 产 中 有 着 十 分 重 要 的 意 义。 的加工误 差 , 在众多误差影响因 素 中 , 铰链的间隙误差以及驱动 杆杆 长 的 测 量 误 差 , 是影响并联机构位姿精度的 2 个重要因 素 。 首 先 根 据 误 差 独 立 作 用 原 理 建 立 3 - 然后根据蒙特卡洛 法 就 T P T 并联机床的误差模型 , 连杆杆长误差以及铰链间隙误差对运动平台位置误 差的影响进行了模拟 , 并利用 M a t l a b 软件对结果进 行仿真 , 为误差补偿提供理论依据 。
汽车制造蒙特卡洛模拟及其在公差设计中的应用

(3)蒙特卡洛积分是利用随机数系列计算积分 的方法,积分维数越高,效率越高.定积分的计算是 蒙特卡洛方法被引入计算数学的开端,这里以定积分
蒙特卡洛模拟及其在公差设计中的应用
袁贵星,王 平
(天津科技大学机械工程学院,天津 300222)
摘 要:在研究了蒙特卡洛(Monte Carlo)模拟的概念、方法和基本步骤的基础上,讨论了蒙特卡洛模拟在计算机辅助
统计公差设计中的应用,提出了基于蒙特卡洛模拟的公差分析流程,并且运用 Microsoft Excel 软件进行了蒙特卡洛模
y = f (x1, x2 , , xn )
(1)
(2)随机数产生器.为了模拟生产中零件的各
个组成尺寸,必须模拟产生大量的服从(0,1)上均
匀分布的随机数.产生伪随机数的方法有平方取中
法、线性同余法等.Microsoft Excel、Matlab 等计算机
软件都有产生伪随机数的相应函数,使计算机模拟快
Abstract:The theory,method,and main course of Monte Carlo Simulation were studied. Its application in computer aided statistic tolerance was discussed. A tolerance analysis process based on Monte Carlo Simulation was put forward. And an applied prototype was illustrated with Monte Carlo Simulation in Microsoft Excel. Simulation results indicate that the result of tolerance analysis with Monte Carlo Method is close to the Probability Method and the calculation precision is improved as the simulation is increased. Monte Carlo Method,as a broad applicable tolerance design method,can solve dimensional chains with any form,including linear,nonlinear,plane,and three-dimensional chains. Keywords:Monte Carlo Simulation;statistical tolerance;tolerance design;tolerance analysis
基于蒙特卡洛模拟的发电厂设备重要度分析
渡
发电厂实施状态维修就是要根据不同设备的 可控性和可维修性 科学合理地选择不
重要性
同的维修方式 形成一套融故障维修 定期维修 状态维修和主动维修为一体的 优化的综合维修 方式 以提高设备可靠性 降低发电成本[1] 发电厂是 1 个由各种工作在不同环境条件下 的设备和子系统组成的高度复杂系统 因而其维 修方式的确定必须建立在设备的重要度( 优先级) 评 价基础之上 以减小维修的盲目性 提高发电厂 的可用性并降低运行 维修费用 因此 进行设 备重要度分析 可为发电企业维修决策提供科学 依据 并为最终实现状态维修奠定基础
基于蒙特卡洛模拟的发电厂设备重要度分析
董玉亮 顾煜炯 杨 昆
华北电力大学动力工程系 北京 102206
CRITICALITY ANALYSIS ON EQUIPMENT IN POWER PLANT BASED ON MONTE CARLO SIMULATION
DONG Yu-liang, GU Yu-jiong, YANG Kun (Department of Power Engineering North China Electric Power University, Beijing 102206, China)
表 7 停运时间评分标准 Tab. 7 Scores for evaluation of downtime
序号 1 2 3 4 工时/日 <2 2~10 10~30 >30 分数 10~20 20~60 60~85 85~100
其次 计算重要性排序 计算判断矩阵 D 的 最大特征根 λmax , 代入齐次线性方程组 即 ( u11 − λ ) w1 + u12 w2 + Λ + u1n wn = 0 u 21w1 + ( u22 − λ ) w2 + Λ + u2n wn = 0 Μ u w + u w + Λ + (u − λ ) w = 0 nn n n1 1 n2 2 解出 w1 , w2 ,Λ , wn 特征向量 W = ( w1 , w2 ,Λ , wn ) (3) 得到最大特征根 λmax
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
!
!"#
用蒙特卡罗法计算筒体半径误差
蒙特卡罗法
[*] 蒙特卡罗 ( !"#$% &’()") 法 是一类通过随机变量的统计试
(8)
(-) 上辊高度误差! 的影响。 对筒体半径误差! !" !+ 假定下辊间距没有误差, 仅考虑上辊高度误差 ! 的影响。 !" 满足以下公式 筒体半径误差! !+
( !, ( !, " 0 !")/ 2 ") !+ $ 2 ’ , !+ $ !+4 ’# ( ’ $ *.) 4$, ’ , (!+4 / !+4 ) !!+ $ ’ / , # 4$,
中国制造业信息化
第 *3 卷
第C期
% % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % % %
记为 . 均匀分布随机数两行, 每行不少于 *. 个, ( 。 -) ) ) $ ,, (-) 令
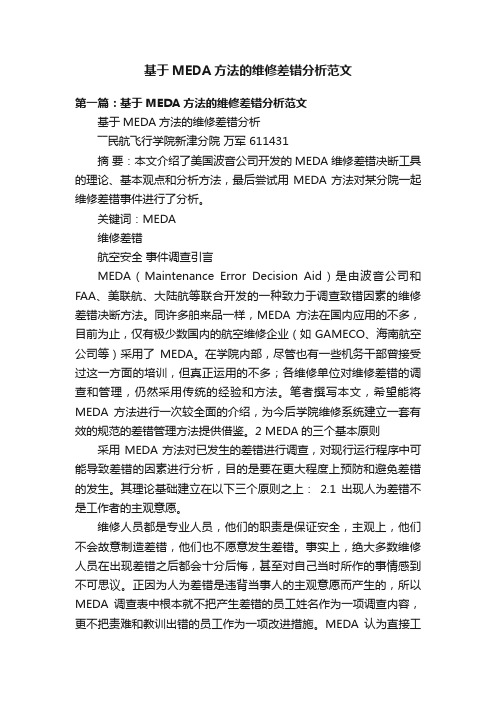
上辊高度间的函 # 筒体半径与下辊间距、 数关系
为了找到筒体半径 # 与下辊间距 ! 、 上辊高度 " 之间的误 差传递关系, 首先要建立三者的函数关系。 图 " 反映了水平下调 上辊高度 " 式三辊卷板机对称卷圆时筒体半径 # 与下辊间距 ! 、 之间的关系。 图( 下辊接触、 未加压时的状 " *)为板材送入与上、 态。 图( 为板材弯曲时的状态。 取两下辊中心连线为 $ 轴, 两 " +) 下辊中心连线的垂直平分线为 % 轴, 坐标原点 &’ (#, , 坐标系 #) 如图 ( 所示。 图中, " +) " 为上辊中心到两下辊中心连线的垂直间 距, ! 为两下辊中心之间的距离。
$ + 生成正态分布随机数 !! 和 !" 。 [3] (,) 利用 !/01/2 提供的 (’#4 () 函数, 产生在 [., 区间上 ,]
,-. ・中国制造业信息化・-..8 年 C 月
应用研究 ・ 董
梅
卢道华
张礼华
基于蒙特卡罗法的卷板机误差分析
学术前沿
! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! !
(., ) !! , ! !! (., ) !" , ! !"
(*) 下辊间距误差! 和上辊高度误差! 对筒体半径误差 !! !" 的影响。 ! !+ 同时考虑下辊间距误差! 和上辊高度误差! 的影响。 筒 !! !" 满足以下公式: 体半径误差! !+
( ! 0 !! , ( !, " 0 !")/ 2 ") !+ $ 2 ’ 3 !+ $ , #!+)4 3’ # 4$, )$, ’ 3 , !!+ $ ( 3 / ,) # # ( !+)4 / !+)4 ) ( ’ / ,) 4$, )$,
收稿日期: !##( ’ #% ’ #$ 基金项目: 镇江市产学研基金资助项目 (!##!!!#) 作者简介: 董
由式 ($) 可知, 在上、 下辊直径 +", 钢板厚度 * 已知的情 +! , 况下, 筒体半径 # 是下辊间距 ! 和上辊高度 " 的函数。
"
误差传递数学模型
为了研究下辊间距误差和上辊高度误差对筒体加工半径的
的影响曲线, 如图 对筒体半径误差 ! ! 下辊间距误差! ! !! !" ( 和 ( $) 所示。 " #) 选取参数 #% $ &’()), #" $ "(()), % $ %()), ! $ ’(()), 图( 取 & $ "*’)), 图( 取 & $ "*+))。 " #) " $)
应用研究 ・ 董
梅
卢道华
张礼华
基于蒙特卡罗法的卷板机误差分析
学术前沿
! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! !
基于蒙特卡罗法的卷板机误差分析
董 梅, 卢道华, 张礼华 !"!##$) (江苏科技大学 机械与动力工程学院, 江苏 镇江
摘要: 分析了水平下调式三辊卷板机的工作原理, 指出了影响卷板机加工质量的主要因素, 在此基 础上建立了误差分析数学模型, 并利用蒙特卡罗法模拟了两下辊间距误差和上辊高度误差对卷板 加工精度的影响。 关键词: 卷板机; 数学模型; 误差分析; 蒙特卡罗法 中图分类号: !"#"; $%&&& 文献标识码: ’ 文章编号: (!##() "%&! ’ "%"% #) ’ #"") ’ #$
&&! ( # ) ! &! &’ ( ! &&’ ( " ,
在直角三角形 &&! &’ 中, 有
!
+! * ) ! ! (") +" * , ) # ! !
! !
&&! ( &! &’ ) && 可推导出
( ( !, # ( ")( + + * ! * ! ! ! ) )( " , " , ) ,( ! ) ) ! ! ! ! ! ($) ! * ) +" ) +! , ! "
验、 随机模拟, 求解数学物理、 工程技术问题近似解的数值方法, 它又被称作统计试验法或随机模拟法。其特点是用数学方法在 计算机上模拟实际概率过程, 然后加以统计处理。 $ + 基本原理。 假定函数 # $ ( …, , 其中变量 &,, …, % &, , &- , &’ ) &- , &’ 的 概率分布已知。 但在实际问题中, ( …, % &, , &- , &’ )往往是未知 的。 蒙特卡罗法利用一个随机数发生器通过直接或间接采样取 …, ( (, ) , …, , 然后 出每一组随机变量 ( &, , &- , &’ )的值 (- ) , (’) ) 按 # 对于 &,, …, &- , &’ 的关系式确定函数 # 的值 *) ,
卷板机是一种将金属板材弯成筒形、 弧形、 锥形或其他形状 制件的通用设备, 根据三点成圆的原理, 利用工作辊相对位置变 化和旋转运动使板材产生连续的塑性变形, 以获得预定形状的
["] 。该设备广泛应用于采油平台、 化工、 造船、 锅炉、 金属构 制件
件等制造业。各行业的迅速发展, 对各种形状、 规格板材制件的 精度要求越来越高, 也相应的对卷板机的性能提出了更高的要 求。 为了检验卷板机的制造质量, 提出对数控系统的精度要求, 需要对卷板机的加工进行误差分析。通过分析误差产生的原 因, 达到合理设计卷板机的目的, 保证在最经济的条件下得到理 想的结果。 我们知道, 在板材卷制过程中, 卷板机三轴辊的定位与运 动, 如下辊的间距与水平位移量、 上辊的下降量、 板材的厚度、 进 给速度及卷板速度等都会影响到筒体的卷制质量。根据定性分 析, 暂时忽略钢板的厚度、 进给速度及卷板速度等因素的影响, 主要研究下辊的间距误差和上辊高度误差对卷筒加工精度的影 响。事实上, 筒体的曲率半径也主要决定于上、 下轴辊中心间 距, 即两下辊之间的水平中心距 ! 和上、 下轴辊在垂直方向的中 心距 " 。 图" 筒体半径 # 与下辊间距 ! 、 上辊高度 " 之间的关系 根据图 " 所示的几何关系, 有
…, *) $ ( % (, ) , (- ) , (’) )
反复独立采样多次 ( ) $ ,, …, , 便可得到函数 # 的一 -, ’) 批采样数据 *,, …, 当模拟次数足够多时, 便可给出与实 *-, *’ , 际情况相近的函数 # 的概率分布及其数字特征。 % + 蒙特卡罗模拟法的基本步骤: (,) 统计确定有关的各基本变量的概型分布及其分布参数; 对所有基本变量按统计特征进行第一次随机采样, 进行 (-) 统计处理, 获得第一次模拟结果; (*) 重复多次独立采样结果, 统计处理模拟结果, 给出问题 的解和精度估计。
・ 中国制造业信息化 ・ "") !##( 年 ) 月
学术前沿 式中:! 和 " 的工作范围, 对于已定型的卷板机, 在使用说明书 中给出; 对于新研制的卷板机, 在技术规格书中给定。 蒙特卡罗法是一种数学仿真方法, 下辊间距误差和上辊高 度误差可以取多次现实, 以模拟实际的物理状况。这种方法在 工程研制中, 特别是在详细设计中广泛被采用。
!