Real time 3D display of hydrographic data for QA and QC. Abstract
测绘科学与技术基本知识
Ⅹ。数字地面模型及其应用
1数字地面模型的概念
2数字地面模型的种类
3 DEM 数据点采集方法
4数字地形模型软件
5数字地形模型的应用
二.航空摄影测量
1.航空摄影
2.外业控制测量与调绘
3.解析空中三角测量
4.数据采集―测图
5原图编辑
6原图清绘
7业补测、补调
三.数字摄影测量基本概念
工程测量中的平面控制测量,一般应与高等级国家三角点联测。平面控制网可采用三角测量,导线测量或三边测量,网的等级分为Ⅱ、Ⅲ、Ⅳ等以及一、二级小三角、小三边。
4.高程控制测量Vertical control survey
高程控制测量,可采用水准测量和电磁波测距三角高程测量。高程控制测量的等级,划分为Ⅱ、Ⅲ、Ⅳ、Ⅴ等。
1.地面摄影测量的特点Characteristics of ground photogrammetry
a.使用地面摄影测量专用的摄影机;
b.在地面上对目标进行摄影,摄取立体像对;
c.实地测定摄影站点和控制点的地面坐标,即地面摄影像对的外方位元素皆是已知的;
d.使用摄影测量方法立体测绘地物地貌.有专门的地面摄影立体测图仪,某些航空摄影测量的全能型精密型立体测图仪以及解析测图仪,也可以作地面摄影测绘.
1.地面摄影测量的特点
2.地面摄影测量的应用范围
Ⅶ.全球定位系统
1.卫星定位的基本原理
2. GPS卫星定位的分类
3.GPS的用途
4.GPS的精度
Ⅷ.遥感
1.传感器的类型
2.常用的卫星图象
3.遥感图象处理
4.遥感的主要应用领域
Ⅸ.地理信息系统
1.基本概念
all of above
1. A chain bridle is preferable to a wire rope towing bridle on a long ocean tow because chain ___D___.A.is more flexible and has the ability to absorb shock because of its weightB.is less subject to wear and damage from abrasionC.requires little maintenanceD.All of the above2.How could lashing gear used aboard Ro-Ro vessels be stowed when not in use ___D____.A.Drape along bracketsB.Hang vertically in a sheltered areaC.Stow in bins at hatch coming sideD.All of the above3.Before starting to hoist provisions,which should be checked ____D____.A.Hoist rope is not kinkedB.Multiple part lines are not twisted around each otherC.The hook is centrally located over the loadD.All of the above4.A pilot vessel on pilotage duty shall show identity lights ___D___.A.At any time while underway B.While at anchorC.While alongside a vessel D.All of the above5.Before letting the anchor go,you should check that the ___D___.A.Chain is clear B.Anchor is clear of obstructionsC.Wildcat is disengaged D.All of the above1. A vessel may enter a traffic separation zone __D____.A.in an emergency B.to engage in fishing within the zoneC.to cross the traffic separation scheme D.Any of the above1.The rule regarding look-outs applies ___D___.A.in restricted visibility B.between dusk and dawn C.in heavy traffic D.All of the above1. A vessel towing astern in an operation which severely restricts the towing vesseland her tow in their ability to change course shall,when making way,exhibit __D____.A.the masthead lights for a towing vessel B.the lights for a vessel restricted in its ability to maneuver C.sidelights,sternlight and towing light D.All of the above1.In complying with the Rules,of what must the mariner take due regard ___D_____.A.Limited backing power of his vessel B.Radar information about nearby vessels C.The occupation of the other vessel,if known D.All of the above1.Which of the following are data layer categories to be displayed on ECDIS _____D___.A.ECDIS warnings and messages B.Hydrographic Office dataC.Notice to Mariners information D.All of the above1.The set of the ocean current is caused by __ D____.A.density differences of the water B.rotation of the earthC.direction of primary circulation of air D.All of the above1.To determine if risk of collision exists,a vessel which is fitted with radar mustuse ___D___.A.Radar scanning B.Radar plotting C.Compass bearings D.All of the above1.Automatic identification systems(AIS)are required to __D____.A.provide safety-related information automatically to shore stations,other vessels and aircraftB.receive safety-related information automatically from similarly equipped vessels C.exchange safety-related information with shore-based facilitiesD.All of the above1.The operation of which aids to navigation may be suspended during war or national emergency ___D_____.A.Navigational satellites B.Loran C.Omega D.Any of the above1.With respect to automatic identification systems(AIS),which information is expected to be broadcast every 1 to 10 seconds ___D_____.A.Rate of turn B.Latitude and longitude C.Navigational status D.All of theabove1.Pedestal cranes have limit switches to restrict movement of which function(s)___D_____.A.Hoist upper & lower limits B.Luff travel limits C.Rider block hoist upper & lower limits D.All of the aboveWhat does “evel-luffing” a ccomplish during crane operations ____D____.A.It prevents the load from swinging when the boom level is adjustedB.Less power is needed when topping the boom with a load on the hookC.It maintains the height of the load above the deckD.All of the above1.What is/are the advantage(s)of cranes over conventional cargo booms___D_____.A.Cranes are able to pick up and drop loads over a greater spotting areaB.Increased safety because the deck is clear of running and standing riggingC.Simplicity of operation of the crane by its operatorD.All of the above1.Which of the following statement(s)is/are TRUE regarding a twin pedestal craneset ____D____.A.The cranes may be operated independentlyB.The cranes may be interconnected for twin operationC.When twinned,the crane rotation on the foundation assembly is unlimitedD.All of the above2.Which statement(s)is/are TRUE concerning crane cargo operations __D______.A.Do not exceed rated load capacity of crane and container spreader or slingsB.During any cargo handling operation,the safety of personnel is paramountC.Cargo handlers must be outfitted with adequate protection from personal injuryD.All the above1.Which wire rope purchases may be used with a 30-ton pedestal crane____D____.A.Hoist B.Luff C.Rider block D.All of the above1.If you came into contact with nitrobenzene while disconnecting the cargo hose,you should be aware that it is ___D___.A.highly toxic when absorbed through the skin B.a blood poison C.a nerve poisonD.all of the above1.Weather information is available from ___D___.A.Commercial radio broadcastsB.The Coast Guard on scheduled marine information broadcastsC.VHF-FM continuous marine weather broadcasts provided by the National Weather ServiceD.All of the aboveA sign of thunderstorm development is a cumulus cloud ___D___.A.Darkening,growing in size and forming an anvil topB.That shows extensive vertical developmentC.Creating cold downdrafts that are felt on the groundD.All of the above1. A vessel entering the eye of a hurricane should expect __D____.A.Moderating winds and heavy confused seas to strike his vessel from all directionsB.The winds to increase to hurricane force and strike from a different direction as the eye passes C.The barometer to reach the lowest pointD.All of the above2.Customs,upon boarding a vessel desiring entry into PRC port,would inspectwhich document ____D____.A.Cargo Manifest B.Certified Crew List C.Stores List D.All of the above1.In the Northern Hemisphere,the right half of the storm is known as the dangeroussemicircle because ___D___.A.the wind speed is greater here since the wind is traveling in the same general direction as the storm's trackB.the direction of the wind and seas might carry a vessel into the path of the stormC.the seas are higher because of greater wind speedD.All of the above1.When your vessel is on or near the path of an approaching tropical storm the__D___.A.wind direction remains steady B.wind speed increases C.barometer falls D.All of the above The anchors should be dropped well out from the pier while at a Mediterranean moorto ___C___.A.Eliminate navigational hazards by allowing the chain to lie along the harbor bottom B.Increase the anchor's reliability by providing a large catenary in the chain C.Permit the ship to maneuver in the stream while weighing anchorsD.Prevent damage to the stern caused by swinging against the pier in the approach1.When securing a hook to the end of a wire rope you should use __D___.A.A bowline knot B.A long spliceC.An overhand knot with a wire rope clipD.Wire rope clips with a thimble eye1.What could be a result of insufficient lubrication of lifeboat winches and davits ___D_____.A.Moisture accumulation in winch motor damaging the electrical wiring B.Freezing of gears in cold weatherC.Corroding of sheaves on the davits so they will not rotateD.All of the above1.What are the vessel equipment and personnel requirements for GMDSS ___D_____.A.Two licensed GMDSS radio operatorsB.Equipment carriage requirementsC.Distress alerting and responseD.All of the above2.Which action should be taken on receipt of a GMDSS distress alert __D______.A.Read the display screen and/or printoutB.Silence the alarmC.Listen for any follow up voice/telex transmission on the appropriate frequency D.All of the aboveWhich message categories cannot be disabled by the GMDSS radio operator ____D____.A.Navigational Warnings B.Meteorological WarningsC.Search and Rescue Information D.All of the aboveWhich statement is generally correct regarding the maintenance requirements for ships under GMDSS ___D_____.A.Redundancy of functions of certain equipment will partially meet this requirement B.On-board maintenance provided by a person holding a GMDSS maintainer's license will partially meet the requirementsC.Shoreside maintenance and scheduled tests and inspections will partially meet this requirementD.All of the above1.Y ou are making a telephone call ship-to-shore using the VHF-FM service.Y ou can tell that the working channel is busy if you hear ___D___.A.Speech B.Signaling tones C.A busy signal D.All of the above。
GMDSS常用缩语

NAVTEX Navigational Telex 航警电传
NCC Network Coordination Center 网络协调中心
NCS Network Coordination Station 网络协调站
ASF Additional Secondary Factor 附加二次相速
ASM At-sea Maintenance 海上维修
ASGD Alarm Signal Generating Device 报警信号发生装置
MERSAR Merchant Ship Search and Rescue Manual 商船救助手册
MES Mobile Earth Station 移动地球站
MF Medium Frequency 中频
MHz Mega Hertz 兆赫
MRSC Maritime Rescue Sub-Center 海上救助分中心
MSC Maritime Safety Committee 海上安全委员会
MSI Maritime Safety Information 海上安全信息
ID Identity 识别
IF Intermediate Frequency 中频
IHO International Hydrographic Organization 国际水道测量组织
IME Internally Mounted Equioment 舱内安装设备
IOR Indian Ocean Region 印度洋区
IPSS International Packet Switched System 国际分组交换系统
origin菜单栏的中文解释
目录File文件 (1)Edit 编辑 (2)View 视图 (2)Plot 绘图 (3)Column 列 (3)Worksheet 工作表 (4)Analysis 分析 (4)Statistics 统计分析 (5)Image 图像 (6)Tools 工具 (9)Format 格式 (9)Windows 窗口 (10)Help 帮助 (10)File文件New 新建 (18)Project项目 (18)Worksheet 工作簿 (19)Matrix 矩阵 (20)Graph 图形 (21)Prom Template 从模板创建 (21)Excel (22)Layout 布局页 (22)Notes 记事本 (23)Function Plot 函数绘图 (24)Open 打开 (27)Open Excel 打开Excel文件 (27)Open Sample OPJ 打开示例项目 (28)Append 追加 (28)Close 关闭 (28)Save Project 保存项目 (28)Save Project As 项目另存为 (28)Save Window As 窗口另存为 (29)Save Template As 模板另存为 (29)Save Workbook as Analysis Template 工作簿另存为分析模板 (30)Save Project as Analysis Template项目另存为分析模板 (30)Import 导入 (30)Import Wizard 导入向导 (31)Customize 定制............................................................................................................. .. (31)Export 导出 (33)Batch Processing 批处理 (34)Database Import数据库导入 (35)Edit 编辑Copy (full precision) 精确复制 (37)Copy (including label rows) 带标识符行复制 (37)Paste Transpose 转置粘贴 (37)Paste Link 粘贴链接 (38)Paste Link Transpose粘贴链接转置 (38)Paste Special 特殊粘贴 (38)Merge (Embedded) Graphs 合并(嵌入)图形 (39)Button Edit Mode 按钮编辑模式 (39)View 视图Toolbars 工具栏 (41)Status Bar 状态栏 (41)Command Window 命令窗口 (42)Code Builder 代码创建器 (42)Quick Help 快速帮助 (43)Project Explorer 项目浏览器 (43)View Windows 视窗 (43)Results Log 结果记录 (44)View Mode (45)Messages Log 信息记录 (46)Actively Update Plots 即时更新图形 (46)Page Break Preview Lines 分页预览线 (46)Print View打印视图 (47)Page 页面视图 (47)Window 窗口视图 (47)Zoom In 放大 (48)Zoom Out 缩小 (49)Whole Page 满页 (49)Show 显示 (49)Show Data Information 显示数据信息 (51)Data Mode 数据模式 (52)Show Column/Row 显示列/行 (52)Show X/Y 显示X/Y (53)Image Mode 图像模式 (53)Show Image Thumbnails 显示缩略图 (53)Plot 绘图Line 线条 (54)Symbol 符号 (55)Line + Symbol 线条+符号 (56)Column/Bar/Pie 柱/条/饼 (56)Multi-Curve 多曲线 (57)3D XYY 三维XYY图 (59)3D XYZ 三维XYZ图 (60)3D Surface 三维曲面图 (60)3D Wire/Bar/Symbol 三维线/柱/符号 (61)Statistics 统计 (62)Area 面积 (65)Contour 等高线图 (65)Specialized 专业图 (66)Stock 股票 (68)Template Library 模板库 (70)Column 列Set as X 设为X (72)Set as Label 设为标记符号 (72)Disregard Column 忽略此列 (73)Set as Y Error 设为Y的误差 (73)Set as Categorical 设为分类数据 (73)Setting Column Values 设定列数值 (74)Fill Column with 填充列 (74)Add New Columns 添加新列 (75)Set Sampling Interval 设置采样间隔 (76)Move Columns 移动列 (76)Show X Column 显示X列 (77)Slide Show of Dependent Graphs 幻灯放映 (77)Add Sparklines 添加拆线图 (79)Worksheet 工作表Sort Range 排序范围 (80)Sort Columns列排序 (81)Sort Worksheet 工作表排序 (81)Clear Worksheet 清除工作表 (81)Worksheet Script 工作表脚本 (81)Worksheet Query 工作表查询 (82)Reset Column Short Names 重置列短名 (83)Split Worksheet 拆分工作表 (84)Split Workbooks 拆分工作簿 (84)Pivot Table 数据透视表 (84)Stack Column 堆列 (85)Unstack Column 拆堆列 (87)Remove Duplicated rows 删除重复行 (87)Reduce Rows 减少行 (88)Transpose 转置 (89)Convert to XYZ 转换为XYZ (90)Convert to Matrix转换为矩阵 (93)Analysis 分析Mathematics 数学运算 (97)Interpolate/Extrapolate Y from X 由X内插/外推求Y (98)Trace Interpolate 迹线外推 (98)Interpolate/Extrapolate 内插/外推 (99)3D Interpolation 三维内插 (100)XYZ Trace Interpolation XYZ 迹线内插 (101)XYZ Surface Area XYZ表面积 (102)Set Column Values 设置列值 (102)Normalize Column. 归一化列 (102)Simple Math 简单数学运算 (103)Differetiate 微分 (104)Integrate 积分 (105)Polygon Area 多边形面积 (105)Average Multiple Curves 多曲线平均 (106)Data Manipulation 数据处理 (106)Subtract Reference Data 与参考值相减 (107)Reduce Duplicate X data 归纳重复的X数据 (108)Reduce by Group 按组归纳 (108)Reduce to Evenly Spaced X 归纳为均匀间隔的X (110)Linear Fit 线性拟合 (112)Fit Linear with X Error 带X误差的线性拟合 (114)Polynomial Fit 多项式拟合 (115)Multiple Linear Regression所谓多元线性回归 (115)Nonlinear Curve Fit 非线性曲线拟合 (117)Nonlinear Surface Fit 非线性表面拟合 (118)Simulate Curve 模拟曲线 (118)Simulate Surface 模拟表面 (119)Exponential Fit 指数拟合 (121)Sigmoidal Fit 反曲拟合 (122)Compare Datasets 比较数据集 (122)Compare Models 比较模型 (123)Signal Processing 信号处理 (125)Smooth 平滑 (125)FFT Filters FFT滤波 (126)FFT (127)Wavelet 小波分析 (129)Convolution 卷积 (132)Deconvolution 反卷积 (133)Coherence 相干性 (134)Correlation 相关性 (135)Hibert Transform希尔伯特变换 (135)Envelope 包络线 (136)Decimation 抽取 (136)Peaks and Baseline 峰和基线 (137)Multiple Peak Fit 多重峰拟合 (138)Single Peak Fit 单峰拟合 (141)Peak Analyzer 峰分析器 (141)Batch Peak Analysis Using Theme 使用主题批量分析 (147)Statistics 统计分析Descriptive Statistics 描述统计 (149)Correlations Coefficient 相关系数 (149)Statistics on Columns 列统计 (151)Statistics on Rows 和统计 (152)Discrete Frequency 离散频率 (154)Frequency Counts 频率计数 (155)Normality Test 正态性检验 (157)2D Frequency Counts/Binning 二维频率计数/分区 (159)Hypothesis Testing 假设检验 (160)One-Sample t-Test 单样本t-检验 (161)Pair-Sample t-Test 配对样本t-检验 (162)Two-Sample t-Test 双样本t-检验 (164)One-Sample Test for Variances 单样本方差检验 (167)Two-Sample Test for Variances 双样本方差检验 (169)ANOV A 方差分析 (170)One-Way ANOV A 单因素方差分析 (170)Two-Way ANOV A 双因素方差分析 (172)One-Way Repeated Measures ANOVA 单因素重复测量方差分析 (174)Two-Way Repeated Measures ANOV A 双因素重复测量方差分析 (176)NonParametric Tests 非参数检验 (178)One-Sample Wilcoxon Signed Rank Test单样本Wilcoxon符号秩检验 (179)Paired Sample Sign Test 配对样本符号检验 (180)Paired Sample Wilcoxon Signed Rank Test配对样本Wilcoxon符号秩检验 (181)Two-Sample Kolmogorov-Smirnov Test 双样本KS检验 (183)Mann-Whitney Test Mann-Whitney检验 (185)Kruskal-Wallis ANOV AKruskal-Wallis方差分析 (187)Moods Median Test 中位数检验 (188)Friedman ANOV A Friedman方差分析 (189)(NPH) K independent Samples K个独立样本 (191)(NPH) Paired Samples 配对样本 (193)(NPH) Two Independent Samples 两个独立样本 (195)Survival Analysis 生存分析 (197)Kaplan-Meier Estimator卡普兰-迈耶估计量 (198)Cox Model Estimator比例风险模型 (199)Weilbull fit Weibull拟合 (201)Multivariate Analysis 多元分析 (203)Principal Component Analysis 主成分分析 (203)K-Means Cluster Analysis K-均值聚类分析 (204)Hierarchical Cluster Analysis 层次聚类分析 (206)Discriminant Analysis 判别分析 (208)Power and Sample Size 功效和样本大小分析 (212)(PSS) One-Sample t-test 单样本t-检验 (212)(PSS) Two-Sample t-test 双样本t-检验 (213)(PSS)Paired t-test 配对样本t-检验 (214)(PSS)One-Way ANOV A 单因素方差分析 (215)ROC Curve受试者工作特征曲线 (216)Image 图像Image adjustments 图像调整 (220)Brightness 亮度 (221)Contrast 对比度 (221)Gamma伽玛值 (221)Hue 色调 (222)Invert 图像色彩翻转 (222)Saturation 饱和度 (223)Histcontrast 直方图对比度 (223)Histequalize 直方图均衡 (223)Auto Level 自动色阶 (224)Color Level 色阶调整 (224)Function LUT 函数搜寻表 (225)Leveling 层次调整 (226)Balance 色彩平衡 (227)Color Replace 颜色替换 (228)Arithmetic transformation 算术变换 (228)Alpha Blend 透明混合 (229)Simple Math 简单数学运算 (230)Math Function 数学函数 (232)Pixel Logic 像素逻辑 (233)Subtract Background 减背景 (234)Extract to XYZ 图像转数据 (235)Morphological Filter 形态学过滤 (236)Replace Background 背景替换 (238)Subtract Interpolated Background 内插背景减影 (238)Conversion 转换 (239)Convert to Data 转成数值 (239)Color to Gray 转换成灰度图....................................................................................... 240 Convert to Image 转换成图像. (241)Binary 转换成二值图 (242)Dynamic Binary 转换成动态二值图 (243)Threshold 阈值 (244)RGB Merge 三原色合并 (245)RGB Splist 三原色拆分 (246)Image Scale 图像比例尺 (247)Geometric Transforms 几何变换 (248)Flip 翻转 (248)Rotate 旋转 (248)Shear 修剪 (249)Resize 调整尺寸 (251)AutoTrim 自动修整 (251)Offset 图像偏移 (252)Spatial Filtering 空间过滤 (254)Average 平均过滤 (255)Gaussian 高斯过滤 (255)Median 中值过滤 (256)Noise 噪音 (257)Edge 边缘.................................................................................................................... 258 Sharpen 锐化................................................................................................................ 258 Unsharpen Mask USM 锐化. (259)User Filter 用户滤镜 (260)Graph 图形 (262)Layer Contents 图层内容 (262)Plot Setup 绘图设置 (263)Add Plot to Layer 层中加图 (263)Add Error Bars 添加误差条 (264)Add Function Graph 添加函数曲线 (265)Rescale to Show All 重置坐标显示全部 (266)Layer Management 图层管理 (266)Add Axis Scrollbar 添加坐标滚动条 (266)New Layer (Axes) 新图层(坐标) (267)Extract to Graphs 提取图层 (268)Apply Palette to Color Map 应用调色板 (270)Merge Graph Windows (271)Speed Mode (271)Update Legend 更新图例 (272)New Legend 新图例 (273)New Enhanced Legend (273)New Table (274)New Color Scale (274)New XY Scaler 新XY比例尺............................................................................................ 275 Set Active Layer By Layer Icon Only ................................................................................... 275 Fit Layer to Graph 图层适合图形....................................................................................... 276 Fit Page to Layers 页面适合图层. (276)Exchange X-Y Axes 交换X-Y坐标 (277)Offset Grouped Data in Layer 偏移图层中的分组数据 (277)Convert to Standard Font Size (277)Data 数据 (278)Set Display Range 设置显示范围 (278)Reset to Full Range 显示全部数据 (280)Mark Data Range 标记数据范围 (280)Clear Data Markers 清除数据标记 (280)Analysis Marker 分析标记 (281)Lock Position 锁定位置 (282)Mask Data Point 给数据点加蒙板 (282)Move Data Point 移动数据点 (283)Remove Bad Data Points 清除坏数据 (285)Gadget 小工具 (285)Quick Fit 快速拟合 (285)Quick Sigmoidal Fit 快速反曲拟合 (287)Quick Peaks 快速峰拟合 (288)Rise Time 上升时间 (289)Cluster 聚类 (289)Statistics (291)Differentiate 微分 (292)Integrate 积分 (293)Interpolate 内插 (293)Intersect 交叉点 (294)FFT 快速傅立叶变换 (295)Vertical Cursor 垂直光标 (295)Layout 布局 (296)Add Graph 添加图形 (297)Add Worksheet 添加工作 (298)Set Picture Holder 开启图像定位 (298)Clear Picture Holder 清除图像定位 (299)New Table 新表格 (299)Global Speed Control 全局速度控制 (300)Tools 工具Options 选项 (301)System Variables 系统变量 (302)Protection 保护 (303)Fitting Function Builder 拟合函数创建器 (304)Fitting Function Organizer 拟合函数管理器 (305)Template Library 模板库 (306)Theme Organizer 主题管理 (306)Import Filters Manager 滤镜导入管理器 (307)Package Manager 包管理器 (308)Customer Menu Organizer 用户菜单管理器 (308)x-Function Builder x-函数创建器 (309)x-Function Script Samples x-函数脚本样本 (309)Copy Origin Sub-VI to LabVIEW User.lib (310)Set Group Folder Location 设置组文件夹位置 (310)Group Folder Manager 组文件夹管理器 (311)Transfer User Files 传递用户文件 (311)Pallet Editor 调色板编辑器 (312)Digitizer 数字转换器 (312)MATLAB Console MATLAB控制台 (313)Mathematica Link 连接Mathematica (314)Format 格式Menu 菜单 (315)Worksheet 工作表 (315)Column 列 (316)Cell 单元格 (317)Snap to Grid 对齐栅格 (317)Programming Control 编程管理 (318)Object Properties 对象属性 (319)Page Properties 页面属性 (320)Layer Properties 图层属性 (320)Plot Properties 图形属性 (321)Snap Layer to Grid 图层对齐栅格 (321)Snap Objects to Grid 对象对齐栅格 (321)Axes 坐标 (321)Axis Tick Labels 坐标刻度 (323)Axis Titles 坐标名称 (323)Windows 窗口Cascade 层叠窗口 (324)Tile Horizontally 水平显示 (324)Tile Vertically 垂直显示 (325)Arrange Ions 排列图标 (325)Refresh 刷新 (325)Duplicate副本 (326)Split 分割 (326)Properties 属性 (327)Command Window 命令窗口 (327)Script Window 脚本窗口 (328)Help 帮助Origin Toolbars 工具栏 (329)Standard 标准 (329)Edit 编辑 (330)Graph 图形 (330)2D Graph 二维图形 (331)3D and Contour Graph 三维图和等高线图 (333)3D Rotation 三维旋转 (334)Worksheet Data 工作表数据 (334)Column 列 (335)Layout 布局 (335)Mask 蒙板 (336)Tools 工具 (336)Object Edit 对象编辑 (337)Arrow 箭头 (338)Style 样式 (338)Format 格式 (339)Auto Update 自动更新 (339)Database 数据库 (340)Markers & Locks 标记和锁定 (340)。
测绘工程专业英语Unit 1

Unit 1What Is Geomatics?Geomatics DefinedWhere does the word Geomatics come from? GEODESY + GEOINFORMATICS =GEOMATICS or GEO-for earth and -MATICS for mathematical or GEO-for Geoscience and -MATICS for informatics.It has been said that geomatics is many things to many people. The term geomatics emerged first in Canada and as an academic discipline; it has been introduced worldwide in a number of institutes of higher education during the past few years, mostly by renaming what was previously called " geodesy"or"surveying", and by adding a number of computer science--and/ or GIS-oriented courses. Now the term includes the traditional surveying definition along with surveying steadily increased importance with the development of new technologies and the growing demand for a variety of spatially related types of information, particularly in measuring and monitoring our environment. Increasingly critical are areas of expanding populations, appreciating land values, dwindling natural resources, and the continuing stressing of the quality of our land, water and air from human activities. As such, geomatics bridges wide arcs from the geosciences through various engineering sciences and computer sciences to spatial planning, land development and the environmental sciences. Now the word geomatics has been adopted by several international bodies including the International Standards Organization (ISO), so it is here to stay.The term "surveyor" is traditionally used to collectively describe those engaged in the above activities. More explicit job descriptions such as Land Surveyor, Engineering Surveyor or Hydrographic Surveyor for example, are commonly used by practitioners to more clearly describe and market their specialized expertise.The term geomatics is a recent creation to convey the true collective and scientific nature of these related activities and has the flexibility to allow for the incorporation of future technological developments in these fields. Adoption of the term also allows a coherent marketing of the profession to industry and schools on a worldwide basis."As a result,both course and award titles in the traditional Land Surveying sector at many of the world's leading universities are being changed to. "Degree in Geomatics". This does not suggest the demise of the term " surveyor" and graduates will still practice as land surveyors or photogrammetrists,etc. as appropriate to their specialization.In the last decade, there has been dramatic development and growth in the use of hardware and software solutions to both measure and process geo-spatial data. This has created and will continue to create new areas of application, with associated job opportunities for suitably qualified graduates. As a result, the role of the " surveyor" is expanding beyond traditional areas of practice, as described above, into new areas of opportunity. In addition, recent advances in the technology of data collection and processing have blurred the boundaries of practice and activity between what were previously regarded as related but separate areas. Such developments are forecast to continue and will create new career paths for graduates whose education and training is broadly based and of a high academic standard.To enable graduates to take full advantage of these developments, significant changes in education and training are required. Academic and professional oinstitutions are also responding, in part, by adopting the term geomatics both as a course and as an award title. A working definition of geomatics, which reflects current thinking and predicted change, is:The science and technology of acquiring, storing, processing, managing ,canalyzing and presenting geographically referenced information (geo-spatial data).This broad term applies both to science and technology, and integrates the following more specific disciplines and technologies including surveyingand oimapping, geodesy,m satellite o positioning,photogrammetry, remote sensing, geographic information systems (GIS) , land management, computer systems, environmental visualization and computer graphics.Several terms such as "geomatics,""geomatic engineering," and"geoinformatics" are now in common use pertaining to activities generally concerned with geographic information. These terms have been adopted primarily to represent the general approach that geographic information is collected, managed,and applied. Along with land surveying,photogammetry,remote sensing,and cartography,GIS is an important component of geomatics.Branches of GeomaticsData acquisition techniques include field surveying, global positioning system (GPS)satellite positioning, and remotely sensed imagery obtained through aerial photography and satellite imagery. It also includes the acquisition of database material scanned from older maps and plans and data collected by related agencies.Data management and process are handled through the use of computer programs for engineering design, digital photogrammetry,image analysis, relational data base management, and geographic information systems (GIS). Data plotting ( presentation)is handled through the use of mapping and other illustrative computer programs; the presentations are displayed on computer screens ( where interactive editing can occur) and are output on paper from digital plotting devices.Once the positions and attributes of geographic entities have been digitized and stored in computer memory,they are available for use by a wide variety of users. Through the use of modem information technology (IT), geomatics brings together professionals in the following disciplines: surveying, mapping, remote sensing, land registration, civil and marine engineering, forestry,agriculture, planning and development, geology,geographical sciences,infrastructure management, navigation, environmental and natural resources monitoring, and computer science.Other Definitions of GeomaticsAs defined by the Canadian Institute of Geomatics in their quarterly journal Geomatica:Geomatics is a field of activities which, using a systemic approach, integrates all the means used to acquire and manage spatial data required as part of scientific,administrative, legal and technical operations involved in the process of the production and management of spatial information.The definition of Geomatics is evolving. A working definition might be "the art, science and technologies related to the management of geographically-referenced information.Geomatics includes a wide range of activities, from the acquisition and analysis of site specific spatial data in engineering and development surveys to the application of GIS and remote sensing technologies in environmental management. It includes cadastral surveying, hydrographic surveying, and ocean mapping, and it plays an important role in land administration and land use management.Geomatics is the modern scientific term referring to the integrated approach of measurement, analysis, management, storage and display of the descriptions and location of Earth-based data, often termed spatial data. These data come from many sources, including earth orbiting satellites, air and sea-borne sensors and ground based instruments. It is processed and manipulated with state-of-the-art information technology using computer software and hardware. It has applications in all disciplines which depend on spatial data, including environmental studies,planning, engineering,navigation,geology (and geophysics, oceanography, land development and land ownership and tourism. It is thus fundamental to all the geoscience disciplines which use spatially related data.[ from the School of Geomatic Engineering, Univ. of New South Wales]Geomatics is concerned with the measurement, representation, analysis,management,retrieval and display of spatial data concerning both the Earths physical features and the built environment. The principal disciplines embraced by Geomatics include the mapping sciences, land management, geographic information systems,i1environmental visualisation, geodesy, photogrammetry, remote sensing and surveying.[ from the Dept. of Geomatics at Univ. of Melbourne]Geomatics comprises the science, engineering, and art involved in collecting andmanaging geographically-referenced information. Geographical information plays animportant role in activities such as environmental monitoring, management of land andmarine resources, and real estate transactions.[ from the Dept. of Geodesy and Geomatics Engineering at UNB]The science of Geomatics is concerned with the measurement, representation , analysis management, retrieval and display of spatial information describing both the Earth'g physical features and the built environment. Geomatics includes disciplines such as:Surveying, Geodesy,Remote Sensing & Photogrammetry, Cartography, Geographic Information Systems, Global Positioning Systems.[ from the Dept. of Surveying and Spatial Information Science at the Univ. of Tasmania]□ Notes:①测绘学(Geomatics)这个术语最初作为一门学科专业出现于加拿大,在过去几年里已被世界各地众多的高等教育机构所采纳,大多数是由以前的“大地测量学”或“测量学”并引入许多计算机科学和地理信息系统方向的课程后重新命名的。
Unity 3D 海水的实现2 折射与反射 离屏相机的渲染
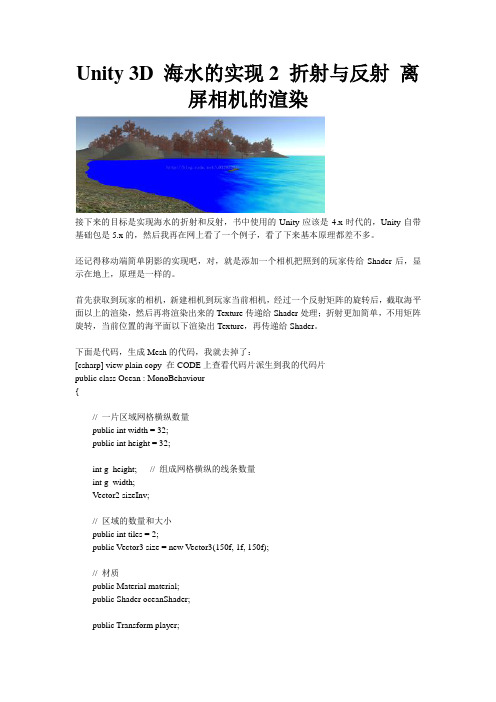
Unity 3D 海水的实现2 折射与反射离屏相机的渲染接下来的目标是实现海水的折射和反射,书中使用的Unity应该是4.x时代的,Unity自带基础包是5.x的,然后我再在网上看了一个例子,看了下来基本原理都差不多。
还记得移动端简单阴影的实现吧,对,就是添加一个相机把照到的玩家传给Shader后,显示在地上,原理是一样的。
首先获取到玩家的相机,新建相机到玩家当前相机,经过一个反射矩阵的旋转后,截取海平面以上的渲染,然后再将渲染出来的Texture传递给Shader处理;折射更加简单,不用矩阵旋转,当前位置的海平面以下渲染出Texture,再传递给Shader。
下面是代码,生成Mesh的代码,我就去掉了:[csharp] view plain copy 在CODE上查看代码片派生到我的代码片public class Ocean : MonoBehaviour{// 一片区域网格横纵数量public int width = 32;public int height = 32;int g_height; // 组成网格横纵的线条数量int g_width;V ector2 sizeInv;// 区域的数量和大小public int tiles = 2;public Vector3 size = new Vector3(150f, 1f, 150f);// 材质public Material material;public Shader oceanShader;public Transform player;public Transform sun;public Vector4 SunDir;// 网格相关V ector3[] vertices; //顶点V ector3[] normals; //法线V ector4[] tangents; //三角Mesh baseMesh;// LOD,越在靠后List的Mesh,网格越少int maxLOD = 4;List<List<Mesh>> tiles_LOD;// 折射反射相关public bool renderReflection = true; //是否启用反射折射public int renderTexWidth = 128;public int renderTexHeight = 128;RenderTexture reflectionTexture = null;RenderTexture refractionTexture = null;Camera offscreenCam = null;bool reflectionRefractionEnabled = false; //是否初始化完成// Use this for initializationvoid Start(){// 折射反射sizeInv = new Vector2(1f / size.x, 1f / size.z);SetupOffscreenRendering(); // 添加离屏相机if (!renderReflection)EnableReflection(false);elseEnableReflection(true);// 计算线条数量g_height = height + 1;g_width = width + 1;// LOD,Mesh所在的List的LOD List编号越小,Mesh的网格越多tiles_LOD = new List<List<Mesh>>();for (int LOD = 0; LOD < maxLOD; LOD++){tiles_LOD.Add(new List<Mesh>());}for (int y = 0; y < tiles; ++y){for (int x = 0; x < tiles; ++x){Debug.Log("创建了一片水");float cy = y - Mathf.Floor(tiles * 0.5f);float cx = x - Mathf.Floor(tiles * 0.5f);// 创建一片水GameObject tile = new GameObject("WaterTile");// 坐标以当前节点为中心tile.transform.parent = transform;tile.transform.localPosition = new Vector3(cx * size.x, 0f, cy * size.z);// 添加Mesh渲染组件tile.AddComponent<MeshFilter>();tile.AddComponent<MeshRenderer>().material = material;yer = ToLayer("Water");tiles_LOD[0].Add(tile.GetComponent<MeshFilter>().mesh);}}GenerateHeightmap();}// 设置折射反射void SetupOffscreenRendering(){// 创建折射反射图RecalculateRenderTextures();// 创建Camera实现离屏渲染GameObject cam = new GameObject(); = "DeepWaterOffscreenCam";cam.transform.parent = transform;offscreenCam = cam.AddComponent<Camera>();offscreenCam.clearFlags = CameraClearFlags.Color;offscreenCam.depth = -1;offscreenCam.enabled = false;}// 当设置reflection和refraction被禁用的时候,设置lod为1void EnableReflection(bool isActive){renderReflection = isActive;if (!isActive) // 关闭反射折射,使用波光粼粼的图片替代{material.SetTexture("_Reflection", null);material.SetTexture("_Refraction", null);oceanShader.maximumLOD = 1;}else // 启用反射折射{OnDisable();oceanShader.maximumLOD = 2;RecalculateRenderTextures();}}// 重新生成反射折射的缓存图片void RecalculateRenderTextures(){if (renderReflection){reflectionTexture = new RenderTexture(renderTexWidth, renderTexHeight, 0);refractionTexture = new RenderTexture(renderTexWidth, renderTexHeight, 0);reflectionTexture.wrapMode = TextureWrapMode.Clamp;refractionTexture.wrapMode = TextureWrapMode.Clamp;reflectionTexture.isPowerOfTwo = true;refractionTexture.isPowerOfTwo = true;material.SetTexture("_Reflection", reflectionTexture);material.SetTexture("_Refraction", refractionTexture);material.SetVector("_Size", new Vector4(size.x, size.y, size.z, 0f));}}// 删除反射折射使用的缓存图片void OnDisable(){if (reflectionTexture != null){DestroyImmediate(reflectionTexture);}if (refractionTexture != null){DestroyImmediate(refractionTexture);}reflectionTexture = null;refractionTexture = null;}// 折射反射渲染物体void RenderObject(){if (Camera.current == offscreenCam)return;if (reflectionTexture == null || refractionTexture == null)return;if (renderReflection)RenderReflectionAndRefraction();}public LayerMask renderLayers = -1;// 具体的渲染,使用第二个相机拷贝当前相机的设置void RenderReflectionAndRefraction(){// 获取当前角色身上的主相机Camera renderCamera = Camera.main;Matrix4x4 originalWorldToCam = renderCamera.worldToCameraMatrix; // 获取世界到相机的矩阵,如果改变了相机的矩阵就不会再根据原Transform渲染,除非调用ResetWorldToCameraMatrixint cullingMask = ~(1 << 4) & renderLayers.value; //剪裁Mask,忽略水本身// 计算反射矩阵float d = -transform.position.y;Matrix4x4 lection = Matrix4x4.zero;CameraHelper.CalculateReflectionMatrix(ref reflection, new Vector4(0f, 1f, 0f, d)); //这里不明白,总是弄出了反射矩阵// 根据反射矩阵计算离屏相机位置和矩阵offscreenCam.backgroundColor = RenderSettings.fogColor;offscreenCam.transform.position = reflection.MultiplyPoint(renderCamera.transform.position); //当前相机置换到反射矩阵中offscreenCam.transform.rotation = renderCamera.transform.rotation;offscreenCam.worldToCameraMatrix = originalWorldToCam * reflection;offscreenCam.cullingMask = cullingMask; //设置剪裁maskoffscreenCam.targetTexture = reflectionTexture; //将反射缓存图片添加到离屏相机里,跟之前阴影是一个原理// 因为反射截取到的图片是翻转的,所以需要设置翻转GL.SetRevertBackfacing(true);// 获取剪裁平面,transform.position.y是当前海水的高度,最后两个值的正负表示剪裁的方向Vector4 cameraSpaceClipPlane = CameraHelper.CameraSpacePlane(offscreenCam, new Vector3(0.0f, transform.position.y, 0.0f), Vector3.up, 1.0f);Matrix4x4 projection = renderCamera.projectionMatrix; //获得渲染相机的投影矩阵Matrix4x4 obliqueProjection = projection;offscreenCam.fieldOfView = renderCamera.fieldOfView; //设置FOVoffscreenCam.aspect = renderCamera.aspect; //设置宽高比CameraHelper.CalculateObliqueMatrix(ref obliqueProjection, cameraSpaceClipPlane);// 开始真正的渲染offscreenCam.projectionMatrix = obliqueProjection;if (!renderReflection)offscreenCam.cullingMask = 0;offscreenCam.Render();GL.SetRevertBackfacing(false);// 折射渲染offscreenCam.cullingMask = cullingMask;offscreenCam.targetTexture = refractionTexture;obliqueProjection = projection;// 将渲染相机的各个参数设置给离屏相机offscreenCam.transform.position = renderCamera.transform.position;offscreenCam.transform.rotation = renderCamera.transform.rotation;offscreenCam.worldToCameraMatrix = originalWorldToCam;// 获取剪裁平面,计算投影矩阵cameraSpaceClipPlane = CameraHelper.CameraSpacePlane(offscreenCam, new Vector3(0.0f, transform.position.y, 0.0f), Vector3.up, -1.0f);CameraHelper.CalculateObliqueMatrix(ref obliqueProjection, cameraSpaceClipPlane);offscreenCam.projectionMatrix = obliqueProjection;offscreenCam.Render();offscreenCam.projectionMatrix = projection;offscreenCam.targetTexture = null;}// 初始化Mesh信息,请参考上一节void GenerateHeightmap(){}// 这边应该是Update的,但写在Update中会报GUI Window tries to begin rendering while something else has not ished rendering的错误void OnGUI(){// 设置玩家、太阳角度,并更新反射折射,折射反射是根据玩家视角来计算的if (player == null)player = GameObject.FindGameObjectWithTag("Player").GetComponent<Transform>();if (sun != null){SunDir = sun.transform.forward;material.SetVector("_SunDir", SunDir);}if (renderReflection)RenderObject();}}然后是CameraHelper的脚本:[csharp] view plain copy 在CODE上查看代码片派生到我的代码片public class CameraHelper{private static float sgn(float a){if (a > 0.0f)return 1.0f;if (a < 0.0f)return -1.0f;return 0.0f;}public static void CalculateObliqueMatrix(ref Matrix4x4 projection, Vector4 clipPlane){Vector4 q = projection.inverse * new Vector4(sgn(clipPlane.x), sgn(clipPlane.y), 1.0f, 1.0f);Vector4 c = clipPlane * (2.0F / (Vector4.Dot(clipPlane, q)));projection[2] = c.x - projection[3];projection[6] = c.y - projection[7];projection[10] = c.z - projection[11];projection[14] = c.w - projection[15];}public static Vector4 CameraSpacePlane(Camera cam, Vector3 pos, Vector3 normal, float sideSign){Vector3 offsetPos = pos + normal * 0.02f;Matrix4x4 m = cam.worldToCameraMatrix;Vector3 cpos = m.MultiplyPoint(offsetPos);Vector3 cnormal = m.MultiplyVector(normal).normalized * sideSign;return new Vector4(cnormal.x, cnormal.y, cnormal.z, -Vector3.Dot(cpos, cnormal));}public static void CalculateReflectionMatrix(ref Matrix4x4 reflectionMat, Vector4 plane) {reflectionMat.m00 = (1F - 2F * plane[0] * plane[0]);reflectionMat.m01 = (-2F * plane[0] * plane[1]);reflectionMat.m02 = (-2F * plane[0] * plane[2]);reflectionMat.m03 = (-2F * plane[0] * plane[3]);reflectionMat.m10 = (-2F * plane[1] * plane[0]);reflectionMat.m11 = (1F - 2F * plane[1] * plane[1]);reflectionMat.m12 = (-2F * plane[1] * plane[2]);reflectionMat.m13 = (-2F * plane[1] * plane[3]);reflectionMat.m20 = (-2F * plane[2] * plane[0]);reflectionMat.m21 = (-2F * plane[2] * plane[1]);reflectionMat.m22 = (1F - 2F * plane[2] * plane[2]);reflectionMat.m23 = (-2F * plane[2] * plane[3]);reflectionMat.m30 = 0F;reflectionMat.m31 = 0F;reflectionMat.m32 = 0F;reflectionMat.m33 = 1F;}}花了三天时间终于整理出来了比较精简的代码,不过渲染部分的矩阵,我还是没有太理解。
测深仪使用说明书hydrotrac
Figure 1.1strike damage and smoothing the flow of water over the face of the transducer.PaperGuidesCaptiveFastenersSupply Take-upThermalPrintheadFigure 2.6Paper Supply & Take-up RollsFigure 2.72.4.1 PAPER LOADINGStep 1: In order to gain access to the paper supply and re-wind areas, open the chart panel by unscrewing the two black captive fasteners at the extreme left of the front panel (Figure 2.7). Open the panel by pulling the handle at the left side of the front panel until the support arm engages a stop.Step 2: If paper has been previously installed in the unit, place the power switch in the STBY position and press the CHART FEED switch (upper right) until sufficient paper has been advanced to clear any previously recorded data. Cut the paper at a convenient point past the recorded data and remove the old chart.Step 3: Swing the panels completely open to the last stop point on the support arm (Figure 2.8). This will allow access to the paper supply and take-up assemblies located at the rear of the panel.Step 4: Locate the printhead release lever located below the printhead on the front side of the panel (Figure 2.9). Push the lever all the way to the left in order to raise the printhead away from the paper and roller.Figure 2.8 Front Panel ExtendedreleaseFigure 2.9Figure 3.1Figure 3.2 Parameter Setting↓Units RangeBlanking (set at 4.5)Note: Alarm activatedwhen depth isless than“Blanking”Figure 3.3Figure 3.5 Bar Check CalibrationF ixL in eW a te r D e p thT im eD a teE v e n tN u m b e r Entering a value for GAUGE results in a line offset from the bottom return by the value entered, being printed on the sounder’s chart. This feature is intended to produce evidence of the collection of GAUGE data during thechange either the displayed depth or the digital output of the HYDROTRAC. The GAUGE line is often used as a tracking confirmation indicator, since the line is continuouslyFigure 3.7The above image is of a sunken barge lying on the bottom of the Mississippi River in about 16 meters of water. The other objects visible in the record, above and to the left of the barge, are “sand waves”.Page 45 of 45。
Geometric Modeling

Geometric ModelingGeometric modeling is a fundamental concept in computer graphics and design, playing a crucial role in creating virtual representations of real-world objects.It involves the use of mathematical equations and algorithms to define and represent shapes, surfaces, and volumes in a digital space. This process allows designers, engineers, and artists to create realistic and accurate 3D models that can be used for various purposes, such as simulation, visualization, and manufacturing. One perspective on geometric modeling is its importance in thefield of architecture and engineering. Architects and engineers rely heavily on geometric modeling to create detailed and precise designs of buildings, structures, and mechanical components. By using geometric modeling software, they can manipulate and visualize complex shapes and structures, ensuring that theirdesigns meet the necessary specifications and requirements. This not only saves time and resources but also allows for better communication and collaboration among team members. Another perspective on geometric modeling is its applicationin the entertainment industry, particularly in the creation of video games and animated films. Game developers and animators use geometric modeling to design characters, environments, and special effects that bring their virtual worlds to life. By accurately representing shapes and surfaces in a 3D space, they cancreate immersive and visually stunning experiences for audiences. This process requires a high level of creativity and technical skill, as artists must balance aesthetics with functionality to achieve the desired result. Geometric modeling also plays a crucial role in the field of manufacturing and prototyping. By using Computer-Aided Design (CAD) software, engineers and designers can create digital models of products and parts, which can then be used to guide the manufacturing process. This allows for greater precision and efficiency in production, as wellas the ability to quickly iterate and refine designs before they are physically produced. Geometric modeling is essential for ensuring that products meet quality standards and functional requirements. In addition to its practical applications, geometric modeling also has a significant impact on the field of scientific research. Scientists and researchers use geometric modeling to analyze andvisualize complex data sets, such as medical imaging, geological formations, andmolecular structures. By representing these data in a 3D space, researchers can gain new insights and discoveries that may not be apparent in traditional 2D representations. This allows for a deeper understanding of the natural world and can lead to breakthroughs in various fields of study. Overall, geometric modeling is a versatile and powerful tool that has a wide range of applications across various industries. Its ability to accurately represent shapes and surfaces in a digital space makes it indispensable for designers, engineers, artists, and researchers alike. Whether creating architectural designs, developing video games, manufacturing products, or conducting scientific research, geometric modeling plays a vital role in shaping the world around us. Its continued innovation and advancement will only further expand its potential and impact in the future.。
航海英语单词表

Chapter 1 Standard Orders on Board V esselWords and Phrasesrepeat [❒♓☐♓♦] n. & v. 重复,复诵helm[♒♏●❍]n. 舵helmsman n.舵工ensure[♓⏹☞◆☜] v. 保证,确保immediately[♓❍♓♎☜♦●♓] adv. 立即,直接地correctly[ ☜❒♏♦●♓] adv. 正确地, 恰当地carry out 实施,进行hold[♒☜◆●♎] v. 拿着, 保持countermand[ ♋◆⏹♦☜❍⏹♎] v. 取消, 撤消concern[ ☜⏹♦☜⏹] n. 关心, 关注inattentive[ ♓⏹☜♦♏⏹♦♓] adj. 疏忽respond[❒♓♦☐⏹♎] v. 回答, 响应response[❒♓♦☐⏹♦] n. 回答, 响应degree[♎✋♈❒♓] n. 度(数)reminder[❒♓❍♋♓⏹♎☜] n. 暗示,提醒rudder[ ❒✈♎☜] n. 舵ease[♓] v. 减轻, 放松amount[☜❍♋◆⏹♦] n. 数量reduce[❒♓♎◆♦] v. 减少, 简化compass heading 罗经船首向indicate[ ♓⏹♎♓♏♓♦] v. 指出, 显示receive[❒♓♦♓] v. 收到receipt[❒♓♦♓♦] n. 收条, 收据, 收到beacon[ ♌♓☜⏹] n. 立标require[❒♓♦♋♓☜] v. 需要, 要求numeral[ ⏹◆❍☜❒☜●] n. 数字separately[ ♦♏☐☜❒☜♦●♓] adv. 个别地,分别地include[♓⏹ ●◆♎] v. 包括, 包含acknowledge[☜⏹●♓♎✞] v. 告知收到,承认desire[♎♓♋♓☜] v. 期望, 希望,select[♦♓●♏♦] v. 选择, 挑选manoeuvre[❍☜⏹◆☜] n. & v. 操纵telegraph[ ♦♏●♓♈❒♐] n. 车钟,电报revolution[ ❒♏☜●◆☞☜⏹] n. 转(数),革命, propulsion[☐❒☜☐✈●☞☜⏹] n. 推进(力)dead[♎♏♎] adv. 完全地emergency[♓❍☜♎✞⏹♦♓] n. 紧急(情况) personnel[ ☐☜♦☜⏹♏●] n. 人员relay[ ❒♓●♏♓] n. & v. 传递propeller[☐❒☜☐♏●☜] n. 螺旋桨,推进器affect[☜♐♏♦] v. 影响shaft[☞♐♦] n. 轴, 杆状物appropriate[☜☐❒☜◆☐❒♓♓♦] adj. 适当的independently[♓⏹♎♓☐♏⏹♎☜⏹♦●♓] adv. 独立地thruster[ ❒✈♦♦☜] n. 推进器thrust[ ❒✈♦♦] n. 推进器specify[ ♦☐♏♦♓♐♋♓] v. 指定, 详细说明power[ ☐♋◆☜] n. 能力, 力量variable[ ☪☜❒♓☜♌●] adj. 可变的, 不定的pitch[☐♓♦☞] n.程度,螺距,倾斜variable pitch propeller 可变螺距螺旋桨combination[ ❍♌♓⏹♏♓☞☜⏹] n. 结合, 合并,化合物moor[❍◆☜]n. & v. 停泊, 固定, 系住heave[♒♓] v. 绞(进),举起avast[☜✌♦♦] v. 停(止)shackle[ ☞✌l] n. 卸扣,(锚链)节hawse[♒] n. 锚链孔hawser[ ♒☜] n. 大缆, 系船索fender[ ♐♏⏹♎☜] n. 碰垫,挡泥板ladder[ ●✌♎☜] n. 梯子, 阶梯swing[♦♦♓☠] v. & n.回转, 旋转,摆动anchorage[ ✌☠☜❒♓♎✞] n. 锚地make sure 确保,保证tight[♦♋♓t] adj. 紧的,严厉的towline[ ♦☜◆●♋♓⏹] n. 拖绳, 拖缆towing line 拖缆, 拖绳headline[ ♒♏♎●♋♓⏹] n. 首缆breastline[♌❒♏♦♦●♋♓⏹] n. 横缆spring[♦☐❒♓☠] n. 春天,倒缆,大潮,弹簧slip rope 回头缆heaving line 撇缆(绳)dolphin[ ♎●♐♓⏹]n. (码头上)系缆桩,海豚progressive[☐❒☜♈❒♏♦♓] adj. 前进的, 进步的substitution[ ♦✈♌♦♦♓♦◆☞☜⏹] n. 代替, 置换drill[♎❒♓●] n. & v. 训练, 钻孔statement[ ♦♦♏♓♦❍☜⏹♦] n. 陈述prompt[☐❒❍☐♦] n. 提示cable[ ♏♓♌●] n. 电缆, 锚链,电报pay out 松出haul in 拉进slack off 松出cast off 解掉Chapter 2 Phrases Used on Deck WatchWords and Phrasescertificate [♦☜♦♓♐♓] n. 证书document [ ♎◆❍☜⏹♦] n. 文件,单据related to …关于,与……有关registration[ ❒♏♎✞♓♦♦❒♏♓☞☜⏹]n. 登记port of registry 船籍港signal letter 信号字母breadth [♌❒♏♎] n. 宽度gross tonnage 总吨net tonnage 净吨propeller [☐❒☜☐♏●☜] n. 螺旋桨residence [ ❒♏♓♎☜⏹♦] n. 居住地,住处name & residence of owner 船东名称和住址same as above 同上ownership [ ☜◆⏹☜☞♓☐] n. (船舶)所有权,拥有valid [ ✌●♓♎] adj. 有效的valid date up to …有效期至……construction [ ☜⏹♦♦❒✈☞☜⏹] n. 构造,结构survey [♦☜♏♓] n. 检验satisfactory[ ♦✌♦♓♦♐✌♦☜❒♓]adj. 令人满意的comply [ ☜❍☐●♋♓] v. (comply with…) 遵守,符合relevant [ ❒♏●♓☜⏹♦] adj. 相关的convention [ ☜⏹♏⏹☞☜⏹] n. 公约,条约fire safety system 安全防火系统appliance [☜☐●♋♓☜⏹♦] n. 设备,应用life-saving appliance 救生设备line-throwing appliance 抛绳设备fire control plan 防火控制图rescue [ ❒♏♦◆] n.& v 救助rescue boat 救助艇accordance [☜♎☜⏹♦] n. 符合in accordance with …符合,与……一致installation[ ♓⏹♦♦☜●♏♓☞☜⏹]n. 装置,设备shipborne [♊☞✋☐♌⏹] adj. 船用的embarkation[ ♏❍♌♏♓☞☜⏹]n. 登轮,上船means of embarkation for pilot 引水员登轮方法disembarkation[ ♎♓♦♏❍♌♏♓☞☜⏹]n 离船,下船publication[ ☐✈♌●♓♏♓☞☜⏹]n. 出版物sound signal 声号distress [☯♎♓♦♦❒♏♦] n. 遇险distress signal 遇险信号aspect [ ✌♦☐♏♦] n. 方面in all other aspect 在其它各个方面functioning [ ♐✈☠☞☜⏹♓☠] n. 功能,作用minimum [ ❍♓⏹♓❍☜❍] adj.& n. 最低值,最低的man [❍✌⏹] v. 为……配备人员certify [ ♦☜♦♓♐♋♓] v. 证明provided that 以……为条件,假如personnel [ ☐☜♦☜⏹♏●] n. (全体)人员personnel department 人事部exceed [☯♓♦♓♎] v. 超过limitation [ ●♓❍♓♦♏♓☞☜⏹] n. 限定DIA.:diameter [♎♋♓✌❍♓♦☜] n. 直径extinguisher [♓♦♦♓☠♈♦♓☞] n 灭火器extinguishant [✋♦♦✋☠♈♦✋☞☜☎❒] n. 灭火剂fire detection 防火探测fire alarm system 火警系统accommodate [☜❍☜♎♏♓♦] v. 容纳,供给buoyant [ ♌♓☜⏹♦] adj. 有浮力的apparatus [ ✌☐☜❒♏♓♦☜♦] n. 设备,装置dimension [♎♓❍♏⏹☞☜⏹] n. 尺寸freeboard [ ♐❒♓♌♎] n. 干舷assign [☜♦♋♓⏹] v. 指定load line 载重线sanitary [ ♦✌⏹♓♦☜❒♓] adj. 卫生的sanitary condition 卫生情况hereby [ ♒♓☜♌♋♓] adv. 特此,以此as a result of ……作为……的结果grant [♈❒⏹♦] v. 同意,准予derat[♎✋♊❒♏✋] v. 灭鼠deratting certificate 除鼠证书exemption [♓♈♏❍☐☞☜⏹] n. 免除deratting exemption certificate 免予除鼠证书lade [●♏♓♎] n. (laden p.p) 装(货),装(船)in the case of 至于,就……来说in case of 万一,假如recommendation[ ❒♏☜❍♏⏹♎♏♓☞☜⏹]n. 推荐,介绍a letter of recommendation 推荐信rodent [ ❒☜◆♎☜⏹♦] n. (鼠)咬plague [☐●♏♓♈] n. 瘟疫,鼠疫vector [ ♏♦☜] n. 传病媒介it is free of rodents and the plague vector 无鼠咬和瘟疫传病媒介lifting appliances 起重设备injury [ ♓⏹♎✞☜❒♓] n. 损伤,受伤permanent [ ☐☜❍☜⏹☜⏹♦] adj. 永久的,持久的deformation[ ♎♓♐❍♏♓☞☜⏹]n. 变形column [ ●☜❍] n. (表格的)栏attachment [☜♦✌♦☞❍☜⏹♦] n. 附件mast [❍♦♦] n. 桅杆accessory [✌♦♏♦☜❒♓] n. 附件servicing certificate 检修证书inflatable [♓⏹♐●♏♓♦☜♌●] adj. 气胀的inflatable liferaft 气胀式救生筏cylinder [ ♦♓●♓⏹♎☜] n. 汽缸,缸瓶accessible [☜♦♏♦☜♌●] adj. 易接近的, 可到达的, compartment [ ☜❍☐♦❍☜⏹♦] n. (分隔)舱,室combustible [ ☜❍♌✈♦♦☜♌●] adj. 可燃烧的free from combustible gas 无可燃气体the above-mentioned 上述(提及)的compulsory [ ☜❍☐✈●♦☜❒♓] adj. 强制性的IOPP: International Oil Pollution Prevention Certificate国际防止油污证书minimum safe manning cert. 最低安全配员证书competency [ ❍☐✋♦☎☜✆⏹♦✋] n. 胜任,能力cert.of competency 适任证书composition [ ❍☐☜♓☞☜⏹] n. 职务accommodation [☜❍☜♎♏♓☞☜⏹]n. 住处, 膳宿,生活区parasite [ ☐✌❒☜♦♋♓♦] n. 寄生物drainage [ ♎❒♏♓⏹♓♎✞] n. 排水设备galley [ ♈✌●♓] n. 厨房handling room 操作间provision [☐❒☜♓✞☜⏹] n. 伙食,食品,provision list 食品清单provision room 食品库ventilation [ ♏⏹♦♓●♏♓☞☜⏹] n. 通风muster [ ❍✈♦♦☜] v.& n. 召集,集合Muster List 应急布署表escape [♓♦♏♓☐] n.& v 逃跑means of escape 逃生方法cracking [ ❒✌♓☠] n. 弄裂,撞毁gyro compass 电罗经magnetic compass 磁罗经signal lamp 信号灯echo sounder 回声测深仪log [●♈] n. 计程仪rudder angle indicator 舵角指示器revolution counter 记数器revolution indicator 转数指示器rate-of-turn indicator 速率指示器side scuttle 舷窗scupper [ ♦✈☐☜] n. 排水孔inlet [ ♓⏹●♏♦] n. 入口inventory [ ♓⏹☜⏹♦❒♓] n. 存货清单rigid liferaft 刚性救生艇survival craft 救生艇筏flare [♐●☪☜] n. 火焰immersion [i5mE:FEn] n. 浸没immersion suit 救生服,防水服thermal [ ☜❍☜●] adj. 热的thermal protective aids 保温装置portable [ ☐♦☜♌●] adj. 手提的,便携式的radiotelegraph installation 无线电报装置EPIRBs: Emergency Position indicating Radio Beacons应急无线电示位标maintenance [ ❍♏♓⏹♦♓⏹☜⏹♦] n. 维修保养1inert gas system 惰性气体系统fixed fire extinguishing installation 固定灭火装置damper [ ♎✌❍☐☜] n. 挡板fire damper 防火板auxiliary machines 辅机bilge pumping arrangement 污水泵配置KHz: kilo hertz 千赫兹(频率单位)MF: medium frequency 中频HF: high frequency 高频INMARSAT: International Maritime Satellite Organization国际海事卫星组织disposal [♎♓♦☐☜◆☜●] n. 处置,回收category [ ✌♦♓♈☜❒♓] n. 种类,范畴garbage [ ♈♌♓♎✞] n. 垃圾dunnage [ ♎✈⏹♓♎✞] n. 垫舱物料rag [❒✌♈] n. 碎布,布条crockery [ ❒☜❒♓] n. 陶瓷(总称)incinerator [♓⏹♦♓⏹☜❒♏♓♦☜] n. (垃圾等的)焚烧炉ash [✌☞] n. 灰渣declaration[ ♎♏●☜❒♏♓☞☜⏹]n. 申报description [♎♓♦❒♓☐☞☜⏹] n 说明,货名1attended with …伴有glandular [ ♈●✌⏹♎◆●☜] adj. 腺(状)的, swelling [ ♦♦♏●♓☠] n. 肿胀,增大diarrhoea [ ♎♋♓☜❒♓☜] n. 腹泻sympton n. 症状collapse [ ☜●✌☐♦] n. 虚脱jaundice [ ♎✞⏹♎♓♦] n. 黄疸acute [☜◆♦] adj. 急性的skin rash 皮疹skin eruption 皮疹apart from…除……外possess [☐☜♏♦] v. 拥有,具有dutiable [ ♎◆♦☜♌●] adj. 应付税的dutiable effects 纳税商品effects which are subject to prohibitions or restrictions禁止物品或受限制物品rank or rating 职务或等级professional training 专业培训assessment [☜♦♏♦❍☜⏹♦] n. 评估particular [☐☜♦♓◆●☜] n. 细节,详情L.O.A.: length overall 总长breath mounded 型宽depth mounded 型深Max. height from keel 从龙骨起最大高度licence [ ●♋♓♦☜⏹♦] n. 执照vaccination[ ✌♦♓⏹♏♓☞☜⏹] n. 种痘,接种vaccination certificate 预防接种证书smallpox [ ♦❍●☐♦] n. 天花yellow fever 黄热病cholera [ ●☜❒☜] n. 霍乱free pratique 无疫通行证freight list 载货清单manifest [ ❍✌⏹♓♐♏♦♦] n. 舱单a copy of the crew list 一份船员名单I.D.: identity card 身份证holder of I.D. 身份证持有者issue landing permit 签发登陆证application form 申请表be valid for ten days 有效期为本10天expire [♓♦☐♋♓☜ ♏♦] v. 到期break the rules 违反规则observe the rules 遵守规则saloon [♦☜●◆⏹] n. 大会客室, 大台. laydays [ ●♏♓♎♏♓] 装卸货日期. ETD: estimated time of departure 预计抵港时间collect the shore passes 收集登陆证extend [♓♦♦♏⏹♎] v. 延长quarantine anchorage 检疫锚地original [☜❒♓♎✞☜⏹☜●] port 始发港inoculate[♓⏹◆●♏♓♦]v. 给……注射预防针epidemic [ ♏☐♓♎♏❍♓] n. 流行性,传染病disease [♎♓♓] n. 疾病infectious disease 传染病get rid of …摆脱forbid [♐☜♌♓♎] v. (forbidden. p.p.) 禁止rat poison 老鼠药rat traps 老鼠夹rat guards 老鼠挡fumigation n. 熏舱pantry [ ☐✌⏹♦❒♓] n. 食品间mandatory [ ❍✌⏹♎☜♦☜❒♓] adj. 强制性的mount [❍♋◆⏹♦] v. 安装,安放last port clearance 上一港结关证(出关)entrance permit 进港许可证the crew personal effect list 船员个人物品清单remainder [❒♓❍♏♓⏹♎☜] n. 剩余部分,其余consumption [ ☜⏹♦✈❍☐☞☜⏹] n. 消耗,消费seal [♦♓●] n. 封存unseal [ ✈⏹♦♓●] v. 启封bonded store 封关仓库alcohol [ ✌●☜♒●] n. 酒类photography[♐☜♦♈❒☜♐♓]n. 照相possession [☐☜♏☞☜⏹] n. 拥有物,所有smuggle [ ♦❍✈♈●] v. 走私smuggled goods 走私物品confiscate [ ⏹♐♓♦♏♓♦] v. 没收pay a fine 付罚金be regarded as…被认为是……sex film 色情电影pornographic[ ☐⏹☜♈❒✌♐♓]adj. 色情的pornographic video tapes 黄色录相带firearms n. 武器ammunition [ ✌❍◆⏹♓☞☜⏹] n. 弹药rifle [ ❒♋♓♐●] n. 来复枪, 步枪,naked light requirement 明火作业要求liquefied Co2 gas 液体二氧化碳气体surface meter 液面计recharge the bottle 给钢瓶充气fire hose 消防水龙precaution [☐❒♓☞☜⏹] n. 预防措施effectively [✋♐♏♦✋●✋] adv. 有效的to run the main engine 动车radio direction finder 无线电侧向仪deviation curve 自差曲线a new edition copy of Guide to Port 一本新版进港指南the latest issue of Notices to Mariners 最新一期航海通告a copy of stowage plan 一份配载图go through the formalities 办理手续a set of import manifest 一套进口舱单stevedoring company 装卸(大队)公司apprentice [☜☐❒♏⏹♦♓♦]n. 学徒,实习生apprentice officer 实习驾驶员port charges 港务费in advance 提前vacant [ ♏♓☜⏹♦] adj. 空的, 空白的, congested [ ☜⏹♎✞♏♦♦✋♎] adj. 拥挤的within port limits 在港界内harbour authorities 港务局draw cash advance from …从.…..预支现金the rate of exchange 兑换率sea protest 海事声明harbour master 港长submit [♦☜♌❍♓♦] vt. 提交, 递交violent [ ♋♓☜●☜⏹♦] adj. 猛烈的, 激烈的, violent storm 暴风strait [♦♦❒♏♓♦] n. 海峡Malacca Strait 马六甲海峡Penetrate [ ☐♏⏹♓♦❒♏♓♦] vt. 穿透cargo surveyor 验船师ambulance [ ✌❍♌◆●☜⏹♦] n. 救护车effect crew replacement 更换船员sign off 解雇sign on 雇佣join the ship 上船repatriation [ ❒♓☐✌♦❒✋♊♏✋☞☜⏹☐♏✋] n. 遣送回国, 归国to obtain emergency visas 取得紧急签证per gang hour 每小时/工班union purchase 双吊concentrate [ ⏹♦♏⏹♦❒♏♓♦] v. 集中to concentrate one’s effort on …把精力集中在……simultaneously [♦✋❍☜●♦♏✋⏹✋☜♦●⍓ ☎✍✆ ♦♋✋❍] adv.同时地insist on …坚持to make a claim for …对……提出索赔charter party 租船合同ascertain [ ✌♦☜♦♏♓⏹] vt. 确定, 探知damaged cargo list 货物损坏清单memo [ ❍♏❍☜◆] n. 备忘录short land memo 短卸记录improper dunnaging 垫舱不当poor maintenance 不良维护constantly [ ⏹♦♦☜⏹♦●✋] adv. 不变地, 经常地,to survey on the spot 现场检验conform to 与……相符distinction [♎♓♦♦♓☠☞☜⏹] n. 区别, 差别discrepancy [♎♓♦❒♏☐☜⏹♦♓] n. 相差, 差异, 矛盾dispute [♎♓♦☐◆♦] n. 争论, 辩论short in dispute 短缺待查tally sheet 理货单consignment [ ☜⏹♦♋♓⏹❍☜⏹♦] n. (货物的)交托, 交货shipping paper 装货单remark [❒♓❍] n. 备注,批注quote [ ♦☜◆♦] vt. 引用, 引证signed under disagreement 在异议下签字athwartships [☜♊♦♦☞✋☐♦] adv. [船]横向地moisture [ ❍♓♦♦☞☜] n. 潮湿, 湿气crisscross [ ❒♓♦❒♦] adj. & adv. 十字行的steel construction 金属结构to protect cargo from sweat and chafage 防止汗损和摩擦circulation [ ♦☜◆●♏♓☞☜⏹] n. 循环, 流通, 发行额air circulation 空气流通broken space 亏舱guarantee [ ♈✌❒☜⏹♦♓:] n. 保证, 保证书,Chapter 4 V essel’s Structure and EquipmentWords and Phrasesframe [♐❒♏♓❍] n. 结构, 框架, 肋骨watertight compartment 水密舱bulkhead [ ♌✈●♒♏♎] n. 舱壁vertical [ ☜♦♓☜●] adj. 垂直的fore peak tank 艏尖舱after peak tank 艉尖舱perpendicular [ ☐☜☐☜⏹♎♓◆●☜] n 垂线length between perpendiculars 两柱间长superstructure [ ♦◆☐☜♦♦❒✈♦☞☜] n. 上部构造, 上层建筑.forecastle [ ♐☜◆♦●] n. 船楼permanent [ ☐☜❍☜⏹☜⏹♦] adj. 永久的, 固定的pattern [ ☐✌♦☜⏹] n. 模式,结构draught [♎❒♐♦] n. 吃水clearance [ ●♓☜❒☜⏹♦] n. 出清,(船只的)出(入)港证jack staff [♊♎✞✌♦♦♐] n. 舰(或船)首旗杆ensign [ ♏⏹♦♋♓⏹ ♏⏹♦⏹]n. 军舰旗, 军旗ensign staff (船艉)旗杆pitching [ ☐♓♦☞♓☠] n. 纵摇rolling [ ❒☜◆●♓☠] n. 横摇heaving [ ♒♓♓☠] n. 船上下起浮trough [ ♦❒♐] n. 波谷,凹部surging [ ♦☜♎✞♓☠] n. 浪涌, 冲击,纵荡swaying n. 摇动,横荡yawing n. 盘旋,偏荡afloat [☜♐●☜◆♦] adj. adv . 飘浮的, 在海上的underway [ ✈⏹♎☜♦♏♓] adj. 在航的,进行中的making headway 向前making sternway 后退making leeway 偏航overhaul [ ☜◆☜♒●] v. 追赶,超越fall astern 落后to heave to 顶风停船to be adrift 漂流aground [☜♈❒♋◆⏹♎] adv. 搁浅地, 地面上bear away 避开风而改变航向moving broadside on 向航侧移动spurling pipe 锚链管cock [ ] n. 龙头compressor [ ☜❍☐❒♏♦☜] n. 压缩机claw [ ●] n. 爪, 脚爪devil’s claw 锚链制house pipes 锚链筒engage [♓⏹♈♏♓♎✞] vt. 咬合,接合be free to engage 齿轮合上release [❒♓●♓♦] n. 松开,释放release the brake 松开刹车canvas [ ✌⏹☜♦] n. 帆布snotter [ ♦⏹♦☜] n. 单套绳hide [haid] n. 兽皮, 皮革log [●♈] n. 圆木iron rail 铁钉steel plate 钢板drum [♎❒✈❍] n. 圆桶barrel [ ♌✌❒☜●] n. 桶,琵琶桶explosive [♓♦☐●☜◆♦♓] n. 爆炸物small package 小件物品lorry [ ●❒♓] n. 卡车locomotive [ ●☜◆☜❍☜◆♦♓] n. 机车, 火车头bulwark [ ♌◆●♦☜☎✆] n. 舷墙break of forecastle 首楼端gyro [ ♎✞♋♓☜❒☜◆] 陀螺仪gyro compass 电罗经magnetic [❍✌♈⏹♏♦♓] adj. 磁的,magnetic compass 磁罗经GPS : Global Positioning System 全球卫星定位系统DGPS : Differential Global Positioning System 全球差分定位系统GMDSS : Global Maritime Distress and Safely System全球海上遇险和安全系统reflect [❒♓♐●♏♦] v. 反射,pulse [☐✈●♦] n. 脉搏, 脉冲outline [ ☜◆♦●♋♓⏹] n. 外型,轮廓sonar [ ♦☜◆⏹] n. 声纳, 声波定位仪beam [bi:m] n. 光束rotating 旋转的scanner [ ♦✌⏹☜] n. 扫描仪convert [ ☜⏹☜♦] n. 转换in relation to…与……有关trail [♦❒♏♓●] n. 踪迹, 痕迹, interpretation [♓⏹♦☜☐❒♓♦♏♓☞☜⏹] n. 解释, 阐明RDF : Radio Direction Finder 无线电侧向仪hyperbolic [ ♒♋♓☐☜♌●♓] adj. 双曲线的synchronize [ ♦✋☠❒☜⏹♋✋] v. 同步establish [♓♦♦✌♌●♓☞] vt. 建立, 设立,phase [feiz] n. 相位dial [ ♎♋♓☜●] n. 刻度盘,accuracy [ ✌◆❒☜♦♓] n. 精确性, 正确度federation [ ♐♏♎☜❒♏♓☞☜⏹] n. 同盟, 联邦civilian [♦♓♓●☜⏹] n. 平民, 公务员currently [ ✈❒☜⏹♦●✋] adv. 普遍地, 通常地,当前apply…to 专注于……,把……用于transit [ ♦❒✌⏹♦♓♦] v. 经过, 通行,传送terrestrial [♦♓❒♏♦♦❒♓☜●] adj. 陆地的terrestrial monitoring stations 陆地监视站via [ ♋♓☜ ♓☜] prep. 经, 通过, 经由radio links 无线电链SOLAS : International Convention for the Safety of Life at Sea国际海上人命安全公约comprise [ ☜❍☐❒♋✋] v. 包含supplement [ ♦✈☐●♓❍☜⏹♦] n. 补遗, 补充gyro repeater 电罗经复示器steering mode selector switch 操舵模式选择开关subsequently [ ♦✈♌♦✋♦☜⏹♦●✋] adv. 后来, 随后latitude [ ●✌♦♓♦◆♎] n. 纬度longitude [ ●⏹♎✞♓♦◆♎] n. 经度excessive [♓♦♏♦♓] adj. 过多的, 过分的azimuth [ ✌♓❍☜] n. 方位, 方位角stipulate [ ♦♦♓☐◆●♏♓♦] v. 规定, 保证SAR : Search And Rescue 搜索和救助DSC : Digital Selective Calling 数字选择性呼叫transmitter [♦❒✌⏹❍♓♦☜] n. 发报机acknowledged [☜⏹●♓♎✞♓♎] adj. 公认的,承认的relaying distress alerts 转发遇险警报address [☜♎❒♏♦] vt 对付,向……讲话transponder [♦❒✌⏹♦☐⏹♎☜☎❒✆] n. 发射机应答器SART : Search And Rescue Transponder 搜救发射机应答器ignite [♓♈⏹♋♓♦] v. 点火, 点燃activate [ ✌♦♓♏♓♦] vt. 刺激, 使活动exposure [♓♦☐☜◆✞☜] n. 暴露inherently [✋⏹♒✋☜❒☜⏹♦●✋] adv. 天性地, 固有地,内在地sustain [♦☜♦♦♏♓⏹] vt. 支撑, 撑住, 维持withstand [♦♓❆♦♦✌⏹♎] vt. 抵挡, 经受住envelop [♓⏹♏●☜☐] vt. 包封, 遮盖impair [♓❍☐☪☜] v. 削弱,减少attached components 辅助部件component [ ☜❍☐☜◆⏹☜⏹♦] n. 成分grabline n. 把手索equidistant [ ♓♦♓♎♓♦♦☜⏹♦] adj. 距离相等的, 等距的loop [●◆☐] n. 环, 线(绳)圈circumference [♦☜✈❍♐☜❒☜⏹♦] n. 圆周, 周围hemisphere [ ♒♏❍♓♦♐♓☜] n. 半球luminous [ ●◆❍♓⏹☜♦] adj. 发光的, 明亮的luminous intensity 光强度energy [ ♏⏹☜♎✞♓] n. 能源emit [♓❍♓♦] vt. 发出, 放射,uniform [ ◆⏹♓♐❍] n. & adj. 制服,均匀的emission [♓❍♓☞☜⏹] n 发射.射出flame [♐●♏♓❍] n. 火焰swamp [♦♦❍☐] vt 淹没unfamiliar [ ✈⏹♐☜❍♓●☜] adj. 新奇的, 不熟悉的guidance [ ♈♋♓♎☜⏹♦] n. 指导, 领导demonstration [ ♎♏❍☜⏹♦♦❒♏♓☞☜⏹] n. 示范, 演示as far as is practicable 尽可能的dislodge [♎♓♦●♎✞] v. 移位,驱逐submersion [♦✈♌❍☜☞☜⏹] n. 淹没automatically [ ♦☜❍✌♦✋●✋] adv. 自动地, 机械地segment [ ♦♏♈❍☜⏹♦] n. 段, 节, 片断waterproof [5♦♦☜☐❒◆♐] adj. 防水的, 不透水的conjunction [ ☜⏹♎✞✈☠☞☜⏹] n. 联合, 关联in conjunction with 与……一起,连同associated adj. 联合的, 关联的be associated with 与……相联系abandonment [☜♌✌⏹♎☜⏹❍☜⏹♦] n. 放弃evacuation [♓✌◆♏♓☞☜⏹] n. 撤退, 走开with the exception of …除外administration [☜♎❍♓⏹♓♦♦❒♏♓☞☜⏹] n. 管理, 经营diagram [ ♎♋♓☜♈❒✌❍] n. 图表illustrating [ ♓●☜♦♦❒♏♓☞☜⏹] n. 说明, 图解discomfort [♎♓♦✈❍♐☜♦] adj. 不舒服的, 不便的manufacturer [ ❍✌⏹◆♐✌♦☞☜❒☜] n. 制造业者, 厂商altitude [ ✌●♦♓♦◆♎] n. (尤指海拔)高度a rate of descent 降落速度parachute [ ☐✌❒☜☞◆♦] n. 降落伞endanger [♓⏹♎♏♓⏹♎✞☜] vt. 危及glowing [ ♈●☜◆♓☠] adj. 炽热的,发光的repeated jumps 连续的跳跃canopy [ ✌⏹☜☐♓] n. 天篷, 遮篷complement [ ❍☐●♓❍☜⏹♦] n. 定员,乘员chamber [ ♦☞♏♓❍♌☜] n. 室, 房间main buoyancy chamber 主浮力舱nonreturn [ ⏹⏹❒♓♦☜⏹] 不返回的, 止回的nonreturn inflation valve 止回充气阀in the event of 万一intact [♓⏹♦✌♦] adj. 完整无缺的periphery [☐☜❒♓♐☜❒♓] n. 外围positive [ ☐☜♦♓] adj. 肯定的,正的toxic [ ♦♦♓] adj. 有毒的non-toxic gas 无毒气体relief valve 安全阀painter [ ☐♏♓⏹♦☜] n. 系船索proportion [☐❒☜☐☞☜⏹] n. 比例, 均衡ample [ ✌❍☐●] adj. 充足的, 丰富的stability [♦♦☜♌♓●♓♦♓] n. 稳定性upright [ ✈☐❒♋♓♦] adj. 垂直的, 竖式的hole [♒☜◆●] n. & v. 洞, 孔,钻孔,大洞assume [☜♦◆❍] vt. 假定, 设想endorse [♓⏹♎♦] v. 在(票据)背面签名endorsed by the administration 由主管机关认可retardant [❒♓♦♎☜⏹♦] n. 阻化剂,延缓fire-retardent 阻燃combustible [ ☜❍♌✈♦♦☜♌●] adj. 可燃物coxswain [ ♦♦♏♓⏹ ♦⏹] n. 艇长, accidentally adv. 偶然地, 意外地cork [ ]n. 软木塞, 软木projectile [☐❒☜♎✞♏♦♋✋● ☎✍✆ ♦●] n. 射弹,抛绳体specify [ ♦☐♏♦♓♐♋♓] vt. 指定, 详细说明, stateroom [ ♦♦♏✋♦❒◆❍] n. [船]特等客舱substitude [♦✈♌♦♦♓♦◆♎] n. 代替disabled [♎✋♦♏✋♌☎☜✆●♎] adj. 伤残的take into account 考虑in respect to 关于gravity [ ♈❒✌♓♦♓]n. 地心引力, 重力davit [ ♎✌♓♦] n. 吊艇柱, 吊柱cradle [ ❒♏♓♎●] n. 吊艇架, 发源地gripe [♈❒♋♓☐] n. 柄, 把手tricing 吊起pennant [ ☐♏⏹☜⏹♦] n. 短绳tricing pennant 吊艇绳muster list 应变部署表emergency instructions 应变须知general emergency alarm 通用紧急警报side scuttle 船舷小窗porthole [ ☐♦♒☜◆●] n. 舷窗passage way 通道clad [ ●✌♎] adj. 穿衣的(clothe的过去式和过去分词) blanket [ ♌●✌☠♓♦] n. 毯子necessitate [⏹♓♦♏♦♓♦♏♓♦] v. 必要revise [❒♓♋♓] vt. 修订, 校订format [ ♐❍✌♦ ❍♦] n. 版式, 形式, 格式status [ ♦♦♏♓♦☜♦] n. 情况,身份, 地位hydrant [ ♒♋♓♎❒☜⏹♦] n. 消防栓, 消防龙头nozzle [ ⏹●] n. 管口, 喷嘴sprinkler [ ♦☐❒♓☠●☜] n. 洒水车, 洒水装置helmet [ ♒♏●❍♓♦] n. 头盔, 钢盔smoke helmet 防毒面具in command of 指挥cancellation [ ✌⏹♦☜●♏♓☞☜⏹] n. 取消Chapter 5 Cargo Handling PhrasesWords and Phrasescapacity [ ☜☐✌♦♓♦♓] n. 容量, 生产量deadweight n. 自重, 载重量bunker [ ♌✈☠☜] v. 加燃料(油)maximum [ ❍✌♦♓❍☜❍] n. 最大量, 最大限度traverse [ ♦❒✌☜☎✆♦] n. 横贯, 移动起重机tandem [ ♦✌⏹♎☜❍] adv. 一前一后,串联stiffener [ ♦♦♓♐⏹☜] n. 加固物UTC: Coordinated Universal Time 协调世界时notice of readiness to load/unload 装/卸准备就绪通知书calculation [ ✌●◆●♏♓☞☜⏹] n. 计算, 考虑sufficient [♦☜♐♓☞☜⏹♦] adj. 充分的, 足够的straighten [ ♦♦❒♏♓♦⏹] v. (使)弄直, 伸直lubricate [ ●◆♌❒♓♏♓♦] vt. 加润滑油crushed boxes 压坏的盒子renailed cartons 重新钉好的纸箱crate [ ❒♏♓♦] n. 板条箱, 柳条箱overstow [ ☜☺☜♊♦♦☜☺✋♎✞] n. 过载reefer hold 冷藏舱interlock [ ♓⏹♦☜●] v. 联锁,互锁stowpiece 装载件flammable [ ♐●✌❍☜♌●] adj. 易燃的, 可燃性的oxidizing 容易氧化的poisonous [ ☐♓⏹☜♦] adj. 有毒的in contact with …与…相接触spontaneous [♦☐⏹♦♏♓⏹☜♦ ⏹♓☜♦] adj. 自发的, 自然产生的combustion [ ☜❍♌✈♦♦☞☜⏹] n. 燃烧spontaneous heating and combustion 自热和自燃compatibility [ ☜❍☐✌♦♓♌♓●♓♦♓] n. [计]兼容性substance [ ♦✈♌♦♦☜⏹♦] n. 物质, 实质IMDG Code : International Maritime Dangerous Cargo Code国际海上危险货物运输规则segregation [ ♦♏♈❒♓♈♏♓☞☜⏹] n. 隔离label [ ●♏♓♌●] n. 标签, 签条placard [ ☐●✌:d] n. 布告,标牌calibrate [ ✌●♓♌❒♏♓♦] v. 校准re-ignite [ ❒♓♓♈⏹♋♓♦] v. 再点火, 再点燃, nausea [ ⏹♦☜ n. 反胃, 晕船acid [ ✌♦✋♎] n. [化]酸evaporate [♓✌☐☜❒♏♓♦] v. (使)蒸发, 消失synthetic [♦♓⏹♏♦♓♍] adj. 合成的, 人造的, 综合的scoop [♦◆☐] n. 铲子,挖泥斗absorbent [☜♌♦♌☜⏹♦] adj. 易吸收的contaminated [ ☜⏹♦✌❍♓⏹♏♓♦♓♎] v. 被污染的casualty [ ✌✞◆☜●♦♓] n 人员伤亡first aid 急救COW : Crude Oil Washing 原油洗舱系统spillage [ ♦☐♓●♓♎✞] n. 溢出, 溢出量cleaning up spillage 清除泄露overflow [ ☜◆☜♐●☜◆] n. 溢出, 超值manifold [ ❍✌⏹♓♐☜◆●♎] n. 歧管manifold connection 分流接头suction [ ♦✈☞☜⏹] n. 吸入, 吸力sea suction valve 海底阀stripping [ ♦♦❒♓☐♓☠] 抽锭, 脱模stripping of ballast tanks 洗压载水舱slop [♦●☐] v. 溢出, 溅溢pump slops on slop tank 将污水入污水舱sludge [♦●✈♎✞] n. 软泥, 淤泥sludge tank 垃圾舱fold [♐☜◆●♎] n. 折ramp [❒✌❍☐] n. 斜坡, 坡道bow ramp 首门wagon [ ♦✌♈☜⏹] n. 四轮马车, 货车seaworthiness [ ♦♓♦☜❆♓⏹♓♦] n. 适航行humidity [♒◆❍♓♎♓♦♓] n. 湿气, 潮湿, 湿度humidity recorder 湿度记录仪reefer plugs 冷藏插头clip-on units 夹钳con-airs 空调器be pre-cooled 预冷却damp [♎✌❍☐] n. 湿气mouldy [ ❍☜◆●♎♓] adj. 发霉的, 腐朽的illegible [♓●♏♎✞☜♌●] adj. 难辨认的false [♐●♦] adj. 错误的, 虚伪的deformed [♎✋♐❍♎] adj. 不成形的infect [♓⏹♐♏♦] vt. [医] 传染, 感染vermin [ ☜❍♓⏹] n. 害虫, 寄生虫celsius [ ♦♏●♦☜♦] adj. 摄氏的Chapter 6 Bridge Deck LogbookWords and Phrasesevidence [ ♏♓♎☜⏹♦] n. 证据,明显, 显著inquiry [♓⏹♦♋♓☜❒♓] n. 质询, 调查tract [♦❒✌♦] n. 航迹,轨迹,足迹 fundamental [ ♐✈⏹♎☜❍♏⏹♦●] adj. 基础的, 基本的behavior [♌♓♒♏♓☜] n. 举止, 行为state [steit] vt. 声明, 陈述, 规定contract [ ⏹♦❒✌t] n. 合同, 契约COLREG: International Regulations for Preventing Collisions at Sea国际海上避碰规则disappearance [ ♎♓♦☜☐♓☜❒☜⏹♦] n. 不见, 消失comment [ ❍♏⏹♦] n. 评论, 意见estimate [ ♏♦♦♓❍♏♓♦] v 估计, 估价, 评估current [ ✈❒☜⏹♦] n. 涌流趋势, 电流, 水流, 气流involve [♓⏹●] vt. 包括, 潜心于, 使陷于deem[♎♓❍] v. 认为, 相信disaster [♎♓♦♦☜] n. 灾难, 天灾, 灾祸contradiction [ ⏹♦❒☜♎♓☞☜⏹] n .反驳, 矛盾stoppage [ ♦♦☐♓♎✞] n. 中断, 填塞investigation [♓⏹♏♦♦♓♈♏♓☞☜⏹] n.. 调查, 研究signature [ ♦♓♈⏹♓♦☞☜] n. 签名, 署名, 信号erasure [♓❒♏♓✞☜] n. 擦除, 抹掉historically 在历史上, 从历史观点上说shipmaster [♊☞✋☐❍♦♦☜☎❒✆ ❍✌♦-] n. 船长incriminate [♓⏹❒♓❍♓⏹♏♓♦] vt. 控告...有罪, 使负罪, 控告for fear of incriminating 担心被控告有罪litigation [ ●♓♦♓♈♏♓☞☜⏹] n. 诉讼, 起诉vindicate [ ♓⏹♎♓♏♓t] vt. 维护, 辩护, 表白liability [ ●♋♓☜♌♓●♓♦♓] n. 责任, 债务, 与assets相对prudent [ ☐❒◆♎☜⏹♦] adj. 谨慎的suspect [♦☜♦☐♏♦] v. 怀疑, 猜想, 对...有所觉察pose [☐☜◆] v. 形成, 引起, 造成dispute [♎♓♦☐◆♦] n. 争论, 辩论, 争吵execution [ ♏♦♓◆☞☜⏹] n. 实行, 完成, 执行insurance [♓⏹☞◆☜❒☜⏹♦] n. 保险, 保险单, 保险业, 保险费court [ ♦] n. 法院, 庭院,consignee [☯☜⏹♦♋♓⏹♓] n. 收货人,受托者, 收件人leeway n. [航海]风压差, 偏航, 风压角summarization n. 摘要, 概要district [ ♎♓♦♦❒♓♦] n. 区域, 管区, 行政区occasion [☜♏♓✞☜⏹] n. 场合, 时机, 机会complain [ ☜❍☐●♏♓⏹] v. 抱怨, 控诉confine [ ⏹♐♋♓⏹] vt. 限制, 禁闭notation n[☜◆♦♏♓☞☜⏹] n. 协会, 联合IALA: International Association of Lighthouse Authorities国际航标协会employ[ ♓❍☐●♓] vt. 雇用, 用, 使用batten [ ♌✌♦⏹] v. & n. 用板条钉住,板条, 木条whistle [☎♒✆♦♓♦●] n. 汽笛, 汽笛声observation [ ☜♌☜♏♓☞☜⏹] n. 观察, 观测auto-pilot 自动舵maneuver [❍☜⏹◆☜] v. 操纵,机动modify [ ❍♎♓♐♋♓] vt. 更改, 修改squall ☯♦♦●] n. 暴风, 暴风雪diminish [♎♓❍♓⏹♓☞] v. 使)减少, (使)变小seize [si:z] v. 抓住, 逮住, 夺取dismiss [♎♓♦❍♓♦] vt. 解散, 下课, 开除sling [♦●♓☠] n. 钩悬带, 吊索platform [ ☐●✌♦♐❍] n. 平台,(车站)月台, 讲台cease [si:s] v. 停止, 终了breeze [bri:z] n. 微风,resume [ri5zju:m] vt. 恢复,再继续, 重新开始,idle [ ♋♓♎●] adj. 空闲的, 懒惰的, 停顿的rush-repair 抢修recondition n[ ❒♓☜⏹♎♓☞☜⏹] vt. 使复原, 使正常overcast[ ☜◆☜♦♦] adj. 阴天的, 愁闷的patrol [☐☜♦❒☜◆●] n. 巡逻clearance formality 出(入)港手续disembark [ ♎♓♦♓❍♌] v. (使)起岸, (使)登陆untie [ ✈⏹♦♋♓] vt. 解开, 松开cape [keip] n. 海角, 岬messroom [♊❍♏♦❒✞❍] n. (军舰或海军基地的)食堂thick [ ♓] adj. 厚的, 粗的, 稠的, 浓的drizzly [ ♎❒♓●♓] adj. 下毛毛雨的N/R: no responsible for 对…..不负责任insufficiency [ ♓⏹♦☜♐♓☞☜⏹♦♓] n. 不足punctually adv. 按时地, 如期地tarring [ ♦❒♓☠] 焦油化, 涂焦油patch [☐✌♦☞] n. 片, 碎片, 斑纹, 斑点gooseneck [♊♈✞♦⏹♏] n. 鹅颈头,鹅颈管gin [♎✞♓⏹] n. 起重装置, 轧棉机sundry [ ♦✈⏹♎❒♓] n. 杂货funnel [ ♐✈⏹☜●] n. 烟囱tent [tent] n. 天蓬,帐篷attendant [ ♦♏⏹♎☜⏹♦] n. 服务员,出席者veer [ ♓☜] vi. 转向, (风向)顺(时针)转tension [ ♦♏⏹☞☜⏹] n. 压力, 张力, 牵力barometer [♌☜❒❍♓♦☜] n. 气压计keenly adv. 敏锐地parallel [ ☐✌❒☜●♏●] adj. 平行的, 相同的, gyroscope [ ♈♋♓☜❒☜♦☜◆☐] n. 陀螺仪, 回旋装置simultaneously [s✋❍☜●♦♏✋⏹✋☜♦●♓] adv. 同时地violently adv. 猛烈地, 激烈地, 极端地subside [♦☜♌♦♋♓♎] v. 减退, 衰减abate [☜♌♏♓♦] vt. (数量、程度等)减少, 减轻cowl [kaul] n. (烟囱顶上的)通风帽junk [♎✞✈☠] n. 舢板athwart [☜♦♦] adv. 横跨着, 斜穿过starry [ ♦♦❒♓] adj. 布满星星的eyebrow [ ♋♓♌❒♋◆] n. 眉毛horizon [♒☜❒♋♓⏹] n. 地平线radiance [♊❒♏✋♎✋☜⏹♦] n. 光辉, 闪烁Chapter 7 Weather ReportWords and Phraseshumidity [♒◆❍♓♎♓♦♓]n. 湿气,湿度absolute humidity绝对湿度related humidity相对湿度condensation [ ⏹♎♏⏹♦♏♓☞☜⏹] n.浓缩,冷凝transition [♦❒✌⏹♓✞☜⏹ ♦♓☞☜⏹] n.转变,过渡moist [❍♓♦♦] n. & adj.潮湿(的)dew [♎◆] n.露(水)dew point 露点saturate [ ♦✌♦☞☜❒♏♓♦] v.使饱和haze [♒♏♓] n.薄雾,霾intensity [♓⏹♦♏⏹♦♓♦♓] n.强度specify [ ♦☐♏♦♓♐♋♓] v.指定,详细说明veer [ ♓☜] vi. (风)顺(时针)转back [♌✌] vi. (风)逆(时针)转hemisphere [ ♒♏❍♓♦♐♓☜] n.半球depression [♎♓☐❒♏☞☜⏹] n.低气压,沮丧isobar [ ♋♓♦☜◆♌] n. (气)等压线circulate [ ♦☜◆●♏♓♦] v. (使)循环,(使)流通trough [ ♦❒♐] n. (低压)槽projection [☐❒☜♎✞♏☞☜⏹] n.凸出物,发射occlusion [☜●◆✞☜⏹ ] n.锢囚(锋) occlude [ ●◆♎] v.使锢囚occluded front锢囚锋abrupt [☜♌❒✈☐♦] adj.突然的,陡峭的cyclone [ ♦♋♓●☜◆⏹] n.气旋anticyclone [ ✌⏹♦♓♦♋♓●☜◆⏹] n. 反气旋,高气压anemometer [ ✌⏹♓❍❍♓♦☜] n. 风速计barometer [♌☜❒❍♓♦☜] n.气压计mercurial [❍☜◆☜❒♓☜●] adj. & n.水银(的) mercurial barometer水银气压计barograph [ ♌✌❒☜◆♈❒♐] n.自动气压计thermometer [ ☜❍❍♓♦☜☎❒✆] n.温度计thermograph [ ☜❍☜♈❒♐] n.温度记录仪hygrometer [♒♋♓♈❒❍♓♦☜] n.湿度计temporary [ ♦♏❍☐☜❒☜❒♓] adj.暂时的observatory [☜♌☜☜♦☜❒♓] n. 天文台,气象台descriptive [♎♓♦❒♓☐♦♓] adj.描述的velocity [ ♓●♦♓♦♓] n.速度,速率ripple [ ❒♓☐●] n.波纹,细浪slight [♦●♋♓♦] adj.轻微的moderate [ ❍♎☜❒♓♦] adj. 中等的rough [❒✈♐] adj.粗暴的phenomenal [♐♓⏹❍♓⏹●] adj.显著的imminent [ ♓❍♓⏹☜⏹♦] adj.即将来临的content [ ☜⏹♦♏⏹♦] n.内容,目录reliability [❒♓●♋♓☜♌♓●♓♦♓] n.可靠性radius [ ❒♏♓♎☜♦] n.半径,范围tropical [ ♦❒☐♓●] adj.热带的tropical depression 热带低压severe [♦♓♓☜] adj.严厉的,剧烈的ridge [❒♓♎✞] n.脊scatter [ ♦✌♦☜] v. 分散scattered showers零星阵雨shower [ ☞♋◆☜] n. 阵雨,(一)阵drizzle [ ♎❒♓●] n. 细雨patch [☐✌♦☞] n.片,小块(地)rain patches小片地区有雨occasional [☜♏♓✞⏹☜●] adj.偶然的occasional showers偶尔阵雨variable [ ☪☜❒♓☜♌●] adj.易变的,不定的Celsius [ ♦♏●♦☜♦] adj.摄氏的bulletin [ ♌◆●♓♦♓⏹] n.公告,报告decelerate [♎♓♦♏●☜❒♏♓♦] v. (使)减弱stationary [ ♦♦♏♓☞☎☜✆⏹☜❒♓] adj.固定的stationary front静止锋quasi-stationary front准静止锋instability [ ♓⏹♦♦☜♌♓●♓♦♓] n.不稳定(性)instability line不稳定线shear [☞♓☜] v. (修)剪shear line切变线convergence [ ☜⏹♊☜♎✞☜⏹♦] n.集中convergence line辐合线intertropical [ ♓⏹♦☜☎✆♦❒☐♓●] adj.热带(地方之间)的intertropical convergence zone热带辐合区axis [ ✌♦♓♦] n.轴axis of trough低压槽axis of ridge 高压脊millibar [ ❍♓●♓♌] n.毫巴hectopascal [ ♒♏♦☜☐✌♦☜●] n.百帕Chapter 8 Regulations for Preventing Collisions at Sea, 1972Words and Phrasesamendment [☜❍♏⏹♎❍☜⏹♦] n.修正(案)adopt [☜♎☐♦] v. 采用reference [ ❒♏♐❒☜⏹♦] n. 参考(书目)with/in reference to 关于refer [❒♓♐☜] v. 提交, 查阅,refer to 查阅considerably [ ☜⏹♦♓♎☜❒☜♌☜●♓] adv.相当地title [ ♦♋♓♦●] n. 名称, 标题annex [☜⏹♏♦] n.附录conduct [ ⏹♎✈♦ ♎☜♦] n. 行为, 操行restrict [❒♓♦♦❒♓♦] v. 限制, 约束, 限定technical [ ♦♏⏹♓☜●] adj. 技术的additional [☜♎♓☞☜⏹●] adj. 另外的, 额外的application [ ✌☐●♓♏♓☞☜⏹] n. 应用, 运用exemption [♓♈♏❍☐☞☜⏹] n.免除,解除proximity [☐❒♦♓❍♓♦♓] n. 最近,接近apply [☜☐●♋♓] v. 申请,应用apply to (将 )应用于therewith [❆☪☜♦♓♦♓❆] adv.以此,此外interfere [ ♓⏹♦☜♐♓☜] v.干涉interfere with干涉,妨碍convoy [ ⏹♓] v. & n.护送,护卫。
物理学专业英语
华中师范大学物理学院物理学专业英语仅供内部学习参考!2014一、课程的任务和教学目的通过学习《物理学专业英语》,学生将掌握物理学领域使用频率较高的专业词汇和表达方法,进而具备基本的阅读理解物理学专业文献的能力。
通过分析《物理学专业英语》课程教材中的范文,学生还将从英语角度理解物理学中个学科的研究内容和主要思想,提高学生的专业英语能力和了解物理学研究前沿的能力。
培养专业英语阅读能力,了解科技英语的特点,提高专业外语的阅读质量和阅读速度;掌握一定量的本专业英文词汇,基本达到能够独立完成一般性本专业外文资料的阅读;达到一定的笔译水平。
要求译文通顺、准确和专业化。
要求译文通顺、准确和专业化。
二、课程内容课程内容包括以下章节:物理学、经典力学、热力学、电磁学、光学、原子物理、统计力学、量子力学和狭义相对论三、基本要求1.充分利用课内时间保证充足的阅读量(约1200~1500词/学时),要求正确理解原文。
2.泛读适量课外相关英文读物,要求基本理解原文主要内容。
3.掌握基本专业词汇(不少于200词)。
4.应具有流利阅读、翻译及赏析专业英语文献,并能简单地进行写作的能力。
四、参考书目录1 Physics 物理学 (1)Introduction to physics (1)Classical and modern physics (2)Research fields (4)V ocabulary (7)2 Classical mechanics 经典力学 (10)Introduction (10)Description of classical mechanics (10)Momentum and collisions (14)Angular momentum (15)V ocabulary (16)3 Thermodynamics 热力学 (18)Introduction (18)Laws of thermodynamics (21)System models (22)Thermodynamic processes (27)Scope of thermodynamics (29)V ocabulary (30)4 Electromagnetism 电磁学 (33)Introduction (33)Electrostatics (33)Magnetostatics (35)Electromagnetic induction (40)V ocabulary (43)5 Optics 光学 (45)Introduction (45)Geometrical optics (45)Physical optics (47)Polarization (50)V ocabulary (51)6 Atomic physics 原子物理 (52)Introduction (52)Electronic configuration (52)Excitation and ionization (56)V ocabulary (59)7 Statistical mechanics 统计力学 (60)Overview (60)Fundamentals (60)Statistical ensembles (63)V ocabulary (65)8 Quantum mechanics 量子力学 (67)Introduction (67)Mathematical formulations (68)Quantization (71)Wave-particle duality (72)Quantum entanglement (75)V ocabulary (77)9 Special relativity 狭义相对论 (79)Introduction (79)Relativity of simultaneity (80)Lorentz transformations (80)Time dilation and length contraction (81)Mass-energy equivalence (82)Relativistic energy-momentum relation (86)V ocabulary (89)正文标记说明:蓝色Arial字体(例如energy):已知的专业词汇蓝色Arial字体加下划线(例如electromagnetism):新学的专业词汇黑色Times New Roman字体加下划线(例如postulate):新学的普通词汇1 Physics 物理学1 Physics 物理学Introduction to physicsPhysics is a part of natural philosophy and a natural science that involves the study of matter and its motion through space and time, along with related concepts such as energy and force. More broadly, it is the general analysis of nature, conducted in order to understand how the universe behaves.Physics is one of the oldest academic disciplines, perhaps the oldest through its inclusion of astronomy. Over the last two millennia, physics was a part of natural philosophy along with chemistry, certain branches of mathematics, and biology, but during the Scientific Revolution in the 17th century, the natural sciences emerged as unique research programs in their own right. Physics intersects with many interdisciplinary areas of research, such as biophysics and quantum chemistry,and the boundaries of physics are not rigidly defined. New ideas in physics often explain the fundamental mechanisms of other sciences, while opening new avenues of research in areas such as mathematics and philosophy.Physics also makes significant contributions through advances in new technologies that arise from theoretical breakthroughs. For example, advances in the understanding of electromagnetism or nuclear physics led directly to the development of new products which have dramatically transformed modern-day society, such as television, computers, domestic appliances, and nuclear weapons; advances in thermodynamics led to the development of industrialization; and advances in mechanics inspired the development of calculus.Core theoriesThough physics deals with a wide variety of systems, certain theories are used by all physicists. Each of these theories were experimentally tested numerous times and found correct as an approximation of nature (within a certain domain of validity).For instance, the theory of classical mechanics accurately describes the motion of objects, provided they are much larger than atoms and moving at much less than the speed of light. These theories continue to be areas of active research, and a remarkable aspect of classical mechanics known as chaos was discovered in the 20th century, three centuries after the original formulation of classical mechanics by Isaac Newton (1642–1727) 【艾萨克·牛顿】.University PhysicsThese central theories are important tools for research into more specialized topics, and any physicist, regardless of his or her specialization, is expected to be literate in them. These include classical mechanics, quantum mechanics, thermodynamics and statistical mechanics, electromagnetism, and special relativity.Classical and modern physicsClassical mechanicsClassical physics includes the traditional branches and topics that were recognized and well-developed before the beginning of the 20th century—classical mechanics, acoustics, optics, thermodynamics, and electromagnetism.Classical mechanics is concerned with bodies acted on by forces and bodies in motion and may be divided into statics (study of the forces on a body or bodies at rest), kinematics (study of motion without regard to its causes), and dynamics (study of motion and the forces that affect it); mechanics may also be divided into solid mechanics and fluid mechanics (known together as continuum mechanics), the latter including such branches as hydrostatics, hydrodynamics, aerodynamics, and pneumatics.Acoustics is the study of how sound is produced, controlled, transmitted and received. Important modern branches of acoustics include ultrasonics, the study of sound waves of very high frequency beyond the range of human hearing; bioacoustics the physics of animal calls and hearing, and electroacoustics, the manipulation of audible sound waves using electronics.Optics, the study of light, is concerned not only with visible light but also with infrared and ultraviolet radiation, which exhibit all of the phenomena of visible light except visibility, e.g., reflection, refraction, interference, diffraction, dispersion, and polarization of light.Heat is a form of energy, the internal energy possessed by the particles of which a substance is composed; thermodynamics deals with the relationships between heat and other forms of energy.Electricity and magnetism have been studied as a single branch of physics since the intimate connection between them was discovered in the early 19th century; an electric current gives rise to a magnetic field and a changing magnetic field induces an electric current. Electrostatics deals with electric charges at rest, electrodynamics with moving charges, and magnetostatics with magnetic poles at rest.Modern PhysicsClassical physics is generally concerned with matter and energy on the normal scale of1 Physics 物理学observation, while much of modern physics is concerned with the behavior of matter and energy under extreme conditions or on the very large or very small scale.For example, atomic and nuclear physics studies matter on the smallest scale at which chemical elements can be identified.The physics of elementary particles is on an even smaller scale, as it is concerned with the most basic units of matter; this branch of physics is also known as high-energy physics because of the extremely high energies necessary to produce many types of particles in large particle accelerators. On this scale, ordinary, commonsense notions of space, time, matter, and energy are no longer valid.The two chief theories of modern physics present a different picture of the concepts of space, time, and matter from that presented by classical physics.Quantum theory is concerned with the discrete, rather than continuous, nature of many phenomena at the atomic and subatomic level, and with the complementary aspects of particles and waves in the description of such phenomena.The theory of relativity is concerned with the description of phenomena that take place in a frame of reference that is in motion with respect to an observer; the special theory of relativity is concerned with relative uniform motion in a straight line and the general theory of relativity with accelerated motion and its connection with gravitation.Both quantum theory and the theory of relativity find applications in all areas of modern physics.Difference between classical and modern physicsWhile physics aims to discover universal laws, its theories lie in explicit domains of applicability. Loosely speaking, the laws of classical physics accurately describe systems whose important length scales are greater than the atomic scale and whose motions are much slower than the speed of light. Outside of this domain, observations do not match their predictions.Albert Einstein【阿尔伯特·爱因斯坦】contributed the framework of special relativity, which replaced notions of absolute time and space with space-time and allowed an accurate description of systems whose components have speeds approaching the speed of light.Max Planck【普朗克】, Erwin Schrödinger【薛定谔】, and others introduced quantum mechanics, a probabilistic notion of particles and interactions that allowed an accurate description of atomic and subatomic scales.Later, quantum field theory unified quantum mechanics and special relativity.General relativity allowed for a dynamical, curved space-time, with which highly massiveUniversity Physicssystems and the large-scale structure of the universe can be well-described. General relativity has not yet been unified with the other fundamental descriptions; several candidate theories of quantum gravity are being developed.Research fieldsContemporary research in physics can be broadly divided into condensed matter physics; atomic, molecular, and optical physics; particle physics; astrophysics; geophysics and biophysics. Some physics departments also support research in Physics education.Since the 20th century, the individual fields of physics have become increasingly specialized, and today most physicists work in a single field for their entire careers. "Universalists" such as Albert Einstein (1879–1955) and Lev Landau (1908–1968)【列夫·朗道】, who worked in multiple fields of physics, are now very rare.Condensed matter physicsCondensed matter physics is the field of physics that deals with the macroscopic physical properties of matter. In particular, it is concerned with the "condensed" phases that appear whenever the number of particles in a system is extremely large and the interactions between them are strong.The most familiar examples of condensed phases are solids and liquids, which arise from the bonding by way of the electromagnetic force between atoms. More exotic condensed phases include the super-fluid and the Bose–Einstein condensate found in certain atomic systems at very low temperature, the superconducting phase exhibited by conduction electrons in certain materials,and the ferromagnetic and antiferromagnetic phases of spins on atomic lattices.Condensed matter physics is by far the largest field of contemporary physics.Historically, condensed matter physics grew out of solid-state physics, which is now considered one of its main subfields. The term condensed matter physics was apparently coined by Philip Anderson when he renamed his research group—previously solid-state theory—in 1967. In 1978, the Division of Solid State Physics of the American Physical Society was renamed as the Division of Condensed Matter Physics.Condensed matter physics has a large overlap with chemistry, materials science, nanotechnology and engineering.Atomic, molecular and optical physicsAtomic, molecular, and optical physics (AMO) is the study of matter–matter and light–matter interactions on the scale of single atoms and molecules.1 Physics 物理学The three areas are grouped together because of their interrelationships, the similarity of methods used, and the commonality of the energy scales that are relevant. All three areas include both classical, semi-classical and quantum treatments; they can treat their subject from a microscopic view (in contrast to a macroscopic view).Atomic physics studies the electron shells of atoms. Current research focuses on activities in quantum control, cooling and trapping of atoms and ions, low-temperature collision dynamics and the effects of electron correlation on structure and dynamics. Atomic physics is influenced by the nucleus (see, e.g., hyperfine splitting), but intra-nuclear phenomena such as fission and fusion are considered part of high-energy physics.Molecular physics focuses on multi-atomic structures and their internal and external interactions with matter and light.Optical physics is distinct from optics in that it tends to focus not on the control of classical light fields by macroscopic objects, but on the fundamental properties of optical fields and their interactions with matter in the microscopic realm.High-energy physics (particle physics) and nuclear physicsParticle physics is the study of the elementary constituents of matter and energy, and the interactions between them.In addition, particle physicists design and develop the high energy accelerators,detectors, and computer programs necessary for this research. The field is also called "high-energy physics" because many elementary particles do not occur naturally, but are created only during high-energy collisions of other particles.Currently, the interactions of elementary particles and fields are described by the Standard Model.●The model accounts for the 12 known particles of matter (quarks and leptons) thatinteract via the strong, weak, and electromagnetic fundamental forces.●Dynamics are described in terms of matter particles exchanging gauge bosons (gluons,W and Z bosons, and photons, respectively).●The Standard Model also predicts a particle known as the Higgs boson. In July 2012CERN, the European laboratory for particle physics, announced the detection of a particle consistent with the Higgs boson.Nuclear Physics is the field of physics that studies the constituents and interactions of atomic nuclei. The most commonly known applications of nuclear physics are nuclear power generation and nuclear weapons technology, but the research has provided application in many fields, including those in nuclear medicine and magnetic resonance imaging, ion implantation in materials engineering, and radiocarbon dating in geology and archaeology.University PhysicsAstrophysics and Physical CosmologyAstrophysics and astronomy are the application of the theories and methods of physics to the study of stellar structure, stellar evolution, the origin of the solar system, and related problems of cosmology. Because astrophysics is a broad subject, astrophysicists typically apply many disciplines of physics, including mechanics, electromagnetism, statistical mechanics, thermodynamics, quantum mechanics, relativity, nuclear and particle physics, and atomic and molecular physics.The discovery by Karl Jansky in 1931 that radio signals were emitted by celestial bodies initiated the science of radio astronomy. Most recently, the frontiers of astronomy have been expanded by space exploration. Perturbations and interference from the earth's atmosphere make space-based observations necessary for infrared, ultraviolet, gamma-ray, and X-ray astronomy.Physical cosmology is the study of the formation and evolution of the universe on its largest scales. Albert Einstein's theory of relativity plays a central role in all modern cosmological theories. In the early 20th century, Hubble's discovery that the universe was expanding, as shown by the Hubble diagram, prompted rival explanations known as the steady state universe and the Big Bang.The Big Bang was confirmed by the success of Big Bang nucleo-synthesis and the discovery of the cosmic microwave background in 1964. The Big Bang model rests on two theoretical pillars: Albert Einstein's general relativity and the cosmological principle (On a sufficiently large scale, the properties of the Universe are the same for all observers). Cosmologists have recently established the ΛCDM model (the standard model of Big Bang cosmology) of the evolution of the universe, which includes cosmic inflation, dark energy and dark matter.Current research frontiersIn condensed matter physics, an important unsolved theoretical problem is that of high-temperature superconductivity. Many condensed matter experiments are aiming to fabricate workable spintronics and quantum computers.In particle physics, the first pieces of experimental evidence for physics beyond the Standard Model have begun to appear. Foremost among these are indications that neutrinos have non-zero mass. These experimental results appear to have solved the long-standing solar neutrino problem, and the physics of massive neutrinos remains an area of active theoretical and experimental research. Particle accelerators have begun probing energy scales in the TeV range, in which experimentalists are hoping to find evidence for the super-symmetric particles, after discovery of the Higgs boson.Theoretical attempts to unify quantum mechanics and general relativity into a single theory1 Physics 物理学of quantum gravity, a program ongoing for over half a century, have not yet been decisively resolved. The current leading candidates are M-theory, superstring theory and loop quantum gravity.Many astronomical and cosmological phenomena have yet to be satisfactorily explained, including the existence of ultra-high energy cosmic rays, the baryon asymmetry, the acceleration of the universe and the anomalous rotation rates of galaxies.Although much progress has been made in high-energy, quantum, and astronomical physics, many everyday phenomena involving complexity, chaos, or turbulence are still poorly understood. Complex problems that seem like they could be solved by a clever application of dynamics and mechanics remain unsolved; examples include the formation of sand-piles, nodes in trickling water, the shape of water droplets, mechanisms of surface tension catastrophes, and self-sorting in shaken heterogeneous collections.These complex phenomena have received growing attention since the 1970s for several reasons, including the availability of modern mathematical methods and computers, which enabled complex systems to be modeled in new ways. Complex physics has become part of increasingly interdisciplinary research, as exemplified by the study of turbulence in aerodynamics and the observation of pattern formation in biological systems.Vocabulary★natural science 自然科学academic disciplines 学科astronomy 天文学in their own right 凭他们本身的实力intersects相交,交叉interdisciplinary交叉学科的,跨学科的★quantum 量子的theoretical breakthroughs 理论突破★electromagnetism 电磁学dramatically显著地★thermodynamics热力学★calculus微积分validity★classical mechanics 经典力学chaos 混沌literate 学者★quantum mechanics量子力学★thermodynamics and statistical mechanics热力学与统计物理★special relativity狭义相对论is concerned with 关注,讨论,考虑acoustics 声学★optics 光学statics静力学at rest 静息kinematics运动学★dynamics动力学ultrasonics超声学manipulation 操作,处理,使用University Physicsinfrared红外ultraviolet紫外radiation辐射reflection 反射refraction 折射★interference 干涉★diffraction 衍射dispersion散射★polarization 极化,偏振internal energy 内能Electricity电性Magnetism 磁性intimate 亲密的induces 诱导,感应scale尺度★elementary particles基本粒子★high-energy physics 高能物理particle accelerators 粒子加速器valid 有效的,正当的★discrete离散的continuous 连续的complementary 互补的★frame of reference 参照系★the special theory of relativity 狭义相对论★general theory of relativity 广义相对论gravitation 重力,万有引力explicit 详细的,清楚的★quantum field theory 量子场论★condensed matter physics凝聚态物理astrophysics天体物理geophysics地球物理Universalist博学多才者★Macroscopic宏观Exotic奇异的★Superconducting 超导Ferromagnetic铁磁质Antiferromagnetic 反铁磁质★Spin自旋Lattice 晶格,点阵,网格★Society社会,学会★microscopic微观的hyperfine splitting超精细分裂fission分裂,裂变fusion熔合,聚变constituents成分,组分accelerators加速器detectors 检测器★quarks夸克lepton 轻子gauge bosons规范玻色子gluons胶子★Higgs boson希格斯玻色子CERN欧洲核子研究中心★Magnetic Resonance Imaging磁共振成像,核磁共振ion implantation 离子注入radiocarbon dating放射性碳年代测定法geology地质学archaeology考古学stellar 恒星cosmology宇宙论celestial bodies 天体Hubble diagram 哈勃图Rival竞争的★Big Bang大爆炸nucleo-synthesis核聚合,核合成pillar支柱cosmological principle宇宙学原理ΛCDM modelΛ-冷暗物质模型cosmic inflation宇宙膨胀1 Physics 物理学fabricate制造,建造spintronics自旋电子元件,自旋电子学★neutrinos 中微子superstring 超弦baryon重子turbulence湍流,扰动,骚动catastrophes突变,灾变,灾难heterogeneous collections异质性集合pattern formation模式形成University Physics2 Classical mechanics 经典力学IntroductionIn physics, classical mechanics is one of the two major sub-fields of mechanics, which is concerned with the set of physical laws describing the motion of bodies under the action of a system of forces. The study of the motion of bodies is an ancient one, making classical mechanics one of the oldest and largest subjects in science, engineering and technology.Classical mechanics describes the motion of macroscopic objects, from projectiles to parts of machinery, as well as astronomical objects, such as spacecraft, planets, stars, and galaxies. Besides this, many specializations within the subject deal with gases, liquids, solids, and other specific sub-topics.Classical mechanics provides extremely accurate results as long as the domain of study is restricted to large objects and the speeds involved do not approach the speed of light. When the objects being dealt with become sufficiently small, it becomes necessary to introduce the other major sub-field of mechanics, quantum mechanics, which reconciles the macroscopic laws of physics with the atomic nature of matter and handles the wave–particle duality of atoms and molecules. In the case of high velocity objects approaching the speed of light, classical mechanics is enhanced by special relativity. General relativity unifies special relativity with Newton's law of universal gravitation, allowing physicists to handle gravitation at a deeper level.The initial stage in the development of classical mechanics is often referred to as Newtonian mechanics, and is associated with the physical concepts employed by and the mathematical methods invented by Newton himself, in parallel with Leibniz【莱布尼兹】, and others.Later, more abstract and general methods were developed, leading to reformulations of classical mechanics known as Lagrangian mechanics and Hamiltonian mechanics. These advances were largely made in the 18th and 19th centuries, and they extend substantially beyond Newton's work, particularly through their use of analytical mechanics. Ultimately, the mathematics developed for these were central to the creation of quantum mechanics.Description of classical mechanicsThe following introduces the basic concepts of classical mechanics. For simplicity, it often2 Classical mechanics 经典力学models real-world objects as point particles, objects with negligible size. The motion of a point particle is characterized by a small number of parameters: its position, mass, and the forces applied to it.In reality, the kind of objects that classical mechanics can describe always have a non-zero size. (The physics of very small particles, such as the electron, is more accurately described by quantum mechanics). Objects with non-zero size have more complicated behavior than hypothetical point particles, because of the additional degrees of freedom—for example, a baseball can spin while it is moving. However, the results for point particles can be used to study such objects by treating them as composite objects, made up of a large number of interacting point particles. The center of mass of a composite object behaves like a point particle.Classical mechanics uses common-sense notions of how matter and forces exist and interact. It assumes that matter and energy have definite, knowable attributes such as where an object is in space and its speed. It also assumes that objects may be directly influenced only by their immediate surroundings, known as the principle of locality.In quantum mechanics objects may have unknowable position or velocity, or instantaneously interact with other objects at a distance.Position and its derivativesThe position of a point particle is defined with respect to an arbitrary fixed reference point, O, in space, usually accompanied by a coordinate system, with the reference point located at the origin of the coordinate system. It is defined as the vector r from O to the particle.In general, the point particle need not be stationary relative to O, so r is a function of t, the time elapsed since an arbitrary initial time.In pre-Einstein relativity (known as Galilean relativity), time is considered an absolute, i.e., the time interval between any given pair of events is the same for all observers. In addition to relying on absolute time, classical mechanics assumes Euclidean geometry for the structure of space.Velocity and speedThe velocity, or the rate of change of position with time, is defined as the derivative of the position with respect to time. In classical mechanics, velocities are directly additive and subtractive as vector quantities; they must be dealt with using vector analysis.When both objects are moving in the same direction, the difference can be given in terms of speed only by ignoring direction.University PhysicsAccelerationThe acceleration , or rate of change of velocity, is the derivative of the velocity with respect to time (the second derivative of the position with respect to time).Acceleration can arise from a change with time of the magnitude of the velocity or of the direction of the velocity or both . If only the magnitude v of the velocity decreases, this is sometimes referred to as deceleration , but generally any change in the velocity with time, including deceleration, is simply referred to as acceleration.Inertial frames of referenceWhile the position and velocity and acceleration of a particle can be referred to any observer in any state of motion, classical mechanics assumes the existence of a special family of reference frames in terms of which the mechanical laws of nature take a comparatively simple form. These special reference frames are called inertial frames .An inertial frame is such that when an object without any force interactions (an idealized situation) is viewed from it, it appears either to be at rest or in a state of uniform motion in a straight line. This is the fundamental definition of an inertial frame. They are characterized by the requirement that all forces entering the observer's physical laws originate in identifiable sources (charges, gravitational bodies, and so forth).A non-inertial reference frame is one accelerating with respect to an inertial one, and in such a non-inertial frame a particle is subject to acceleration by fictitious forces that enter the equations of motion solely as a result of its accelerated motion, and do not originate in identifiable sources. These fictitious forces are in addition to the real forces recognized in an inertial frame.A key concept of inertial frames is the method for identifying them. For practical purposes, reference frames that are un-accelerated with respect to the distant stars are regarded as good approximations to inertial frames.Forces; Newton's second lawNewton was the first to mathematically express the relationship between force and momentum . Some physicists interpret Newton's second law of motion as a definition of force and mass, while others consider it a fundamental postulate, a law of nature. Either interpretation has the same mathematical consequences, historically known as "Newton's Second Law":a m t v m t p F ===d )(d d dThe quantity m v is called the (canonical ) momentum . The net force on a particle is thus equal to rate of change of momentum of the particle with time.So long as the force acting on a particle is known, Newton's second law is sufficient to。
RealFlow翻译教程08——海洋波浪

波波是出生在海里的,他不是鱼,也不是海藻,更不是贝壳。
她是个小波浪,她是小女生哦。
她的样子不固定,一会温柔平静的像小绵羊,一会疯狂怒吼的像大老虎。
虽然她会变成不同的样子,可她还是叫波波。
我们知道波波虽然没有脚,但她可厉害了,能到很远很远的地方,甚至还能从南极到北极呢。
波波其实不喜欢自己凶的像大老虎,这样看起来一点不淑女,是没人喜欢的。
波波很喜欢天上的云弟弟,因为云弟弟经常在天上变成各种好玩的样子,有一回云弟弟,还把自己变成狼外婆,然后把帽子当鞋子穿,走路一扭一扭的,可好玩了。
波波总会被云弟弟滑稽的样子逗的咯咯笑。
不过波波还是最喜欢云弟弟变成小雨点下来看她,一滴一滴落在波波的身上,然后波波就会变出一圈圈好看的波纹。
小雨点落在波波身上时,是会奏出好听的曲子的,波波还能根据曲子的节奏听出云弟弟今天有没有不高兴,有时候还会听出明天云弟弟要讲什么故事呢。
这个小秘密波波一直没告诉过云弟弟。
波波有个愿望,就是能飞到天上去亲亲云弟弟。
但一直没能实现。
(有人能帮助我们可爱的波波吗?看了下面教程说不定你能哦)波峰浪花这种典型的浪花形成需要适当天气和环境条件。
汹涌的或细碎的波浪,在暴风雨时很常见,海岸附近也有。
汹涌或细碎可看成是波浪的缩放,造成的差异。
本质上是一样的。
特别是RealFlow 4用户会在这一课获益,因为默认模拟波浪。
用RealFlow5或RealFlow2012有点不同,这些高版本支持被称为“Tessendorff波”的统计频谱波浪(statistical spectrum wave)的模拟。
这高度逼真的模型提供了一个函数来创建和调整波浪,与或多或少尖锐的波峰。
这些频率波(spectrum wave)会使结果更逼真,想快速完成波浪制作用这方法不错另一种方法是在自由Python脚本帮助下从其它资源导入置换贴图,但这个方法有两个很不好的缺点:1.你需要用外部资源来创建波浪的外形(capable)2.在大部分情况下RealFlow插入波浪,会再一次导致成波浪尖端是圆形示例视频是尖锐的波浪和其它形态的组合。
国外船用罗经

NAVIGATION > COMPASS - GYRO OR FIBRE OPTIC GYRO(1)OCTANSOCTANS, with Ethernet output, is an IMO certified survey gradegyrocompass and complete motion sensor. It is based on IXSEA\'s FOGtechnology, which outputs true heading, roll, pitch, surge, sway, heave,speed, acceleration and rate of turn.APPLICATIONS • Multibeam hydrographic survey• AUV• DP vessels•Dredging• Emergency gyro for submarines• Main AHRS for navigationand dynamic monitoringFEATURES BENEFITS• Complete gyrocompass and motion sensor• High-performance real-time outputs of true heading, roll, pitch Safe Heave™, surge, sway as well as acceleration and rate of turn• Fiber Optic Gyroscope (FOG), unique strap-down technology• No spinning element hence maintenance free• Ethernet, Bluetoo th, Wi-Fi• Wireless network ready• IMO Certification• Pre-approved international quality and safety standard• Small, portable plug and play system• Saves valuable time(2)Sperry marine Navigat X Gyro CompassThe first digital marine gyro compass of its type to be designed as a single unit and of unparalleled compactness in a polyurethane hard foam housing,the Navigat X Mk1 digital gyro compass has a low weight.this allows the gyrocompass to be installed on any bridge, from large yachts to the most capacious merchant vessels.Ship's cables are connected directly to the terminals within the gyrocompass housing which facilitates installation(3)Tokimec Gyro Compass Type TG-8000Meets IMO regulations A-424(X1) ISO 8728 Compact units.Fast follow-up rate.Alternative model type TG-8500 for high speed vessels. Fast serial data output IEC61162-2.Start-up timer function.(4)Sperry Navigat 2100 GyrocompassThe navigat 2100 is the first solid state, fully electronic digitalgyrocompass system for marine application in strapdowntechnology designed for integrated bridges and advanced highspeed vessels.The fibre optic gyro compass is a complete solid state designwith no rotating or other moving parts.It has very high reliability and no maintenance requirementsduring its service life.The Navigat fibre optic gyrocompass and attitude heading reference system is comprised of a sensor unit, a control and display unit, and an interface and power supply unit.(5)SG BROWN MERIDIAN GYRO COMPASSHighly accurate performanceLow cost of ownershipSystem flexibilityCan be installed as a stand alone unit or with any of the SGBrown range of repeaters and ancillariesVersatile and flexible clearly demonstrated with the remotecontrol optionFreedom to install the main unit in the most convenientlocation whilst installing the remote control unit where it can be seen and regularly used经销商地址:(1)DalianSperry Marine ShanghaiContact Sperry Marine Shanghai(2)GuangzhouSperry Marine ShanghaiContact Sperry Marine Shanghai(3)ShanghaiNorthrop Grumman Sperry Marine Trading (Shanghai) Co., ltd. Sperry Marine Trading (Shanghai) Co., ltd.Unit 802Zhongrong Hengrui International TowerNo. 620 Zhangyang RoadShanghai 200122CHINATel: (86)(21)5835 5885Fax: (86)(21)5835 5866Service: service.china@Sales: sandy.qi@(4)Hong Kong Sheung WanSperry Marine69 Jervois StreetSheung Wan,HONG KONGTel: (852)2581 9122Fax: (852)2851 9967edison.triguero@Features & Benefits:∙IMO, HSC and Wheelmark certified∙Fast initial settle time∙Small, lightweight and versatile∙Dynamic heading accuracy of 0.6°∙Static heading accuracy of 0.1°∙Multiple analogue and digital outputs∙Low cost of ownership∙MTBF >30,000 hours∙High turn rate of 200° per secondA range of repeaters and ancillary products isalso available.Click to download a Product Data SheetProduct range: Meridian Subsea RP, MAHRS, Orion INS Features & Benefits:∙Master heading reference unit∙Incorporates state-of-the-art either DTG or RLG gyros ∙Fast settle time∙Heading accuracy to 0.1°∙Roll and pitch accuracy to 0.01°∙Dynamic turn rate 200-1000° per second∙Fast and simple installationA range of repeaters and ancillary products is also available.Click to download a Product Data Sheet : Orion INS; MAHRS; Meridian Subsea Gyrocompasses.∙IMO and Wheelmark certified∙State-of-the-art digital electronics∙Maintenance-free DTG element∙Dynamic heading accuracy of ±0.2°∙Static heading accuracy of 0.05°∙40 minute settle time∙MTBF >30,000 hours∙High turn rate of 200° per second∙User-friendly digital set-up and self-testA range of repeaters and ancillary products is also available.Click to download a Product Data Sheet。
maya流体特效
玛雅流体特效欢迎来看MAYA流体特效,应用流体动力学观点技术去模拟2D和3D大气特效,燃烧特效,胶带流体特效,这些特效是以体积方式渲染的,物体间互户移动,接触互相影响的,流体特效也同样包括海洋的模拟.在这个MAYA的译文中你能建立一个跟随类型的流体特效点击图像,观看动画.真实2D和3D大气特效如云,薄雾,雾,风,烟,火,和爆炸.胶粘流体.如熔化,熔岩.开放空间,大洋,水.注意:MAYA只解释单一流体.意思是你不能让两个或更多的流体相互作用的特效(例如:传布水,那里有水和空气两个流体)通过对帮助的学习,你很快就会找到一条建立你自己的特效的途境,MAYA提供范例文件包括(流体,建模,材质,灯光,环境去建立完整的特效),范例文件能快速的输入到你的场景中,不更改即播放和渲染,或者玩改,它们来自定义特效,MAYA也可以先定义初始是流体模拟的开始点(例如,一朵云)和事先为细节或缓存特效定义和设置属性,访问MAYA公开主页,下载新的流体范例文件是初始形状.1. 建立流体特效流体特效有三个基本类型动力学流体特效,它是尊循自然规律的流体动力学流体你所对它们贴图,使它们几何以碰撞,去移动几何,去变换几何体.非力学流体特殊,若运动,是动态,纹理.因为这种流体是不需解算的所以渲染这种类型的流体要比动力学流体快得多.开放水流体特效,通过把海洋材质赋给一个平面而建立.通过虚拟体附在波浪波峰上,你能控制几何体的(例如:小船)随波浪的浮沉,详细方法请看建立海洋特效理解流体特效.开始前,有一些基本概念可以更有效的理解,流体特效建立动力学流体或非动力力学流体时,你先建立一个container溶器,详细资料看创立海洋特效.一个流体溶器一个一个2D,3D的矩形边界框,0它定义流体的生存空间,没有这个边界,一个动力学流体能真实地在无边界空间中变形(可以想象成被吹散的气体),你的场景将永不停息的渲染.2D流体溶器3D流体溶器你可以通过将流体的任何或所有的属性掷入溶器来定义真实的流体外观和动作.流体特性,描述密度,密度是流体的可见特性.温度,反高爆可影响一个流体反应,因为流体会生高或起反应,速度,速度是流体的特性,是移动,密度,温度,燃料,颜色定义,速度是动力学流体必需模拟,你可以通过用速度的力量去推动溶器内所有的物体.燃料是密度定义的可发生反应的区域,燃料属性描述反应的情况,温度能点燃燃料为爆炸物效.你可以用这些属性(一个边框梯度)或栅格定义这些属性栅格流体属性定义一个流体属性象一个栅格,放置不用的属值在每个栅格单位叫做体积像素.2d fluid3d fluid这个有利条件栅格你可以精确的控制每个属性在溶器中,你能指定流体动力解算器为动力学流体模拟,至少当这流体属性被定义为流体栅格,这属性值被解算.图为这属性在每个体积像中改度.你可以放置精细属性,通过放设在栅格的位置,或者应用一个预先定义的初始隐藏区域对静态栅格只能放置属性,不能应用流体动力解算.通过增加体积像素的数目,可以组成一个动静态或动态栅格流体,从而增大了流体图像的渲染品质(但是也增加了它的渲染时间)预先设定梯度属性值定义一个属性为预先确定梯度设置属性值,这属性在整个时间段是恒量,它们不变化你可以为流体定义的边框梯度指定贴图,流体运动中具有生动的贴图属性,因为流体没有动力学解算,所以它的渲染要比流体动力学快得多.建立流体特效的基本流程.1调入一个范例特效它类似你想建立的产品,如果不跳过第四步如果范例特效不附合你的要求看下一步请看调入范例特效2建立一个流体溶器,请参看建立流体溶器调入流体范例流体特效范例文件包括流体,几何体,材质,灯光,隐藏文件,和环境,可以建立完整的特效,你可以很快的将它们调入场景,不必更改就可以插放和渲染.修改这些文件,建立自定义特效,通过对工具的学习可以理解怎样建立自己的特效或随意的简单正确的应用它们调入一个流体特效范例,1选择Fluid Effects >Get Fluid Exam ple,这个Vlsor面板将打开到Fluid Effects(流体范例)项目下2单击鼠标中键不放,拖动预制的大洋(从Vlsor中)到场景中MAYA 调入这个范例场景到你的场景中,从网格上获取流体范例一个增加的流体范例可以在流体范例中用到,一个成长的碰撞可用的范例可以从Alias 1wavefront 的主网获取从网站上获取流体范例1. 选择Fluid Effects>Get Exam ples on the wed 你默认游览器将自动打开到Alias Wa Vefrtnt流体特效连接主页下2. 在主页中预览和下载文件到Visor中建立一个非动力学流体特效非动力学流体特效不能用动力学流体解算器建立流体运动.这个属性值是一个恒量(在整个时间)你可以用非动力学流体建立运动并为包括定一个生动的纹理属性(详参看纹理)在整个时间内定义一个恒量属性值,在MAYAK 中你可以预先确定一个边恒梯度,属性或者静态栅格,定义一个静状弹性栅格你可以控制体积像素内的种属性,你可以通过发射,描绘或指定一个放置精细属性的栅格,这样就预先在容器中确定了一个存储器(请参阅”添加属性到液体容器,你把这个值放进一个静态栅格恒量中在整个时间段内.建立动力学流体特效流体特效是应用流体动力学规律去摸拟流体运动动力学流体模拟可以建立真实的流体运动,让流体表现动感,用粒子是难以实现如果你想表现流体的动力学属性(例如,密度)就必需定义一个动力学栅格速度必须为速度定义流体容器(它不能被设置成关闭)当你运行这个模拟时MAYA指定一个流体动力学解算器,给这个模拟所属性在容器,在每一个时间段中计算新的值来代替旧值在栅格中.在一个动力学珊格中,你可以放置精细属性值在一个栅格中通过发射,描绘,或者指定一个预定存储器在容器中(请参阅添加属性到容器)当梯度属性值在为动力学模拟计算中被应用,这个属性值作为一个模拟计算结果不能被改变.例如:你能用一个动力学栅格定义密度,但是只添加了单方向上的恒定速度去影响动动的密度,在这个模拟方法中大量的方向上的速度将保持不变,但是密度的值却发生了变化.为动力学流体指定力你可以通过指定力给流体建立动力学流体,你可以使用内力或外力,你能增加重力和磨擦在流体节点内部(在动力学模拟部分的属性编辑器)应力流体内力应用力到流体内部是直接而有效的使流体移动的途径,密度必须被设置动力学栅格,而速度不能被设置成关闭.1外力也能影响流体的表观应用流体的速度充当力速度(包括动荡)能被用作移动周围物体在动力学栅格中的力量,速度的漩涡属性流体内力属性独特有效为建立小栅格洲涡运动应用外力场/(fields)动力学场(在Fields菜单)也能影响流体运动,应用Graewi ty和Tarbulenle建立流体在应用外力更直接,但是用外力你可以控制整个目标连接部场到流体1选择流体连接器2选择Fields>Fieldnam e3点击向前播放按钮观看模拟建立流体容器一个流体容器是一个2D或3D直角矩形界它定义流体的生存空间,,没有这些边界一个动力学流体能够真实的变形在无限的空间中(可以想像成被区散的气)你的场景将永不停息的渲染下去.因为必须有特别的数据定义它们所以3D流体本质很大,动力学流体解算是很慢的,有很多案例中,你想要的特效可以被使用简单,办存也强大的2流体作到一个2D流体容器实际上是一个3D容器上方向的缩减,通过上轴的尺寸决定容器,当它变厚,它也变得不透明,通过制用上轴尺过你能”假造”3D特效(一个物体移动接触流体,而不需要额外的渲染时间,它将超进真实的3D流体.2D3D流体容器被放置其内建立一个流体容器:1建立一个流体容器:3D空间流体,选择Fluid Effeds>Create 2D Conlainer上打开2D容器选项对话框2修改选项定义大小和决定这流体容器,如果需要,点击Appy 和close通过默认Maya建立的容器,密度和速度在每个体积像素上的动力学栅格值都为0,温度和燃料是关闭.如果你播放模拟,什么也不会变化你必须放置流体属性到容器中去看流体或模拟流体表观,详细的如何做请看添加属性到容器建立容器选项X ,Y ,Z .Resolution定义决定流体的在体积像素中(立方体虚构的流体基础体积像素)高的resolution有好的细节和品质,但增加3. 渲染时间减慢了,,高互模拟.默认resotulion:3D容器里10,10,10默认resotulion:2D容器里40,40X,Y,Z, Size用MAYA的工作单位定义流体容器的物理尺寸默认尺寸3D流体容器10,10,10,默认尺寸2D 流体容器10,10,0,10,信息制造一个容器resolution关闭proportion尺寸,例如,如果尺寸里,10.0,5.0,2.0 那么valid resolution后可能里10,20,8,设置resolution均衡值,即使你不用任何栅格(你应用所有梯度值定义属性,栅格仍然被应用决定接触体积尺寸,如果resolution没有正确设置均衡尺寸那么高品质将在某一轴向极速下降注意即使你没有使用栅格,增大resolution将会增高品质设置(体积元素化分更细)变化可视流体容器边界Dcsplay部分在流体的Attribwte Editor,改变边界添加所属到容器有两种方法在流体的容器中定义流体的密度,速度,温度,燃料和颜色属性(你可以应用任何组合,用这个方法去建立流体特效)(请参看定义梯度属性)添加属性到动力学或者动力学栅格,如下:用一个流体发射器,在流体容器中发射流体属性,请看发射流体属性到栅格中.在流体容器中描绘流体属性,详细请看在栅格中描绘流体属性用一个流体边框放置预先定义属性(初态存储器)在将其放置流体容器中,(增加确定初态到流体容器,从物体发射流体属性,(从物体发射流体定义预先确定梯度属性:在流体溶器中定义流体的梯度属性(这个值永远不变).因为梯度是MAYA内部定义的在渲染时间内不计算一通过生动的贴图指定梯度技术,你可以得到非常美丽的效果,它要比动力学栅格特效省好多时间.在这个属性值在流体容器中能被定义梯度是不改变的.因为这属性值不需要计算,流体梯度属性比流体动力学栅格属性渲染快得多,你可以做出一些有趣的,美丽的特效.,产品通过指定贴图到梯度得到生动的贴图.详细请看纹里贴图流体梯度类型的流体的一通及溶器不变值(无梯度)或者它可以有一个ram p(渐变)值0……1,X向梯度,Y 向-Z向内外到溶器中心,你可以放缩这些值,但你们不能改变添加梯度容量到容器,1,建立流体容器建立3D空间流体选择Fluid Effects>Create 3D Container “”打开3D流体选项窗建2维流体,选择Fluid Effects>Create 2D Container””打开2D流体选项窗2.修改定义流体溶器和resotution尺寸以改变容器容量.个性完毕可选Apply或close详细请看建立容器选项.3.选择流体容器.选择Fluid Effects>Add/Editcontents>Gadients””开户流体梯度选项窗4.开启选项窗后,想描绘那个梯度就选那个梯度,然后击Apply或Close你能从Flucdshapen (注意)Attribute Editor从容器中添加,容量梯度方法,改变产品梯度,然后改变产品梯度到想要的梯度类型发射流体属性到栅格你可以用一个流体发射器添加流体属性(Density Heat,Fuel和color)到流体容器中,移动流体发射属性体积像素的静态或动力学栅格容器,用这个值可以得到生的模拟表观.发射器必需在流体容器范围内发射.你可以在一个流体容器内进行多重发射.你也可以用一个流体发射器的负发射属性值将流体的Densi ty,Heat 和Fuel从流体容器中移除.发射流体容器属性到容器1建立一个流体容器详细请看建立流体容器2选择容器,选择FLUID Effeits>Add Edit Contents>Em itterD 打开发射器选项窗技巧通过第一二步你可以在同一时间建立流体发射器和将它发射器连接.对3D流体,选择Flaid Effects>Create 3D Containerand Em atter上对2D流体选择Fluid Effects>Create 2D Containerand Em itter上3修改发射器的基本属性后点击Apply 和Close详细请看发射器选项.Maya建立一个体积流体发射器和连接,它在流体容器中2D3D4在例带范围,点击play按钮在视图中观看流体模拟如果你是wlre fram e(线框显示,模式;流体默认显示为粒子.流体将要渲染时观看模拟,切换到Shaded模式到流体container的Attribnte Editor, 改变到Display As Rendered5.移动发射器(保持它在容器内), 适当地修改流体容器和流体发射器属性来完成,你想要的特效,详细在修改流体容器(flucdshapen)属性,请看修改流体属性.详细在修改流体发射器(flucdshapen) 属性.请看修改流体发射器属性发射器选项Emittef nam e :为发射器命名Bocsic Em itter Attributes (发射器基本参数)Emitter Type (发射器类型)Om ni:设置发射器类型为全方向的点发射器,流体发射属性在所有方向发射.Volum e(体积类型)流体发射属性是一个封闭体积,请查看体积形态项Density Rate(密度等级)设置一个平均等级在那个密度值被发射进栅格每秒负数值从栅格中移除密度Heat Rate设置每秒被发射到栅格中心平均温度速度Fuel Rate设置每秒中发射多少燃料到栅格Fluid Dropoff设置衰减值,对体积发射器的衰减是定义多体积轴向外衰减多少对点,线如面发射器的衰减是基于发射点和从Min Dis Tance 到Max Distance 辐射Cycle Em ission在每隔几帧后周期发射随机数字流,详细请看周期间隔属性设置周期发射器来就改变随机流,不能通过MEL和Shnders或其它来改变帧选项也是至多每帧1 次,而结束标本不影响重设置Cycle Enterval定义每间隔多少帧重复随机数据流,请参Cycle Em ission如果周期发射没有设置,它没有效果.Distance Attributes (距离属性)Max Distancc 是在那里,新的粒子或者密度被发射器建立(此最大距离) 不能用在体积发射器. Min Distance:定义新粒子被发射建立的最小距离,不能用在体积发射器.Volum e Shape设置发射器的体积形态,它仅影响发射器类型义.V olum e,Volum e Offser X,Y,X,这是从属性定义发射器的发射点在发射器体积中心偏移距离Volum e Sweep是弧形体积发射用于Spnere 球Cone 锥Cyluneler和 TorusSectoon Radius仅指定给torus体积类型,定义torus扫描范围.在栅格中描绘流体属性你可以用Paint Fluid Tool 在流体栅格中精确的描绘流体的细节属性和用每种brush slroke(笔刷)通过放缩,光滑更替和添加去编辑现有属性.Paint Fluid Tool是工匠笔刷工具.因此作用很像其它工匠工具详细请看工匠笔刷工具部分,在Maya中以Painting对faintfluid属性值.容器模式必需定义成静态.栅格或者动力学栅格在2D容器中描绘在2D容器中描绘属性值就是在帆布上描绘一样,在容器的表观平面上移动笔刷,就拖动属性设置到栅格中.Q描绘描流体属性到2D流体容器中1选择一个流体容器2选择Fluid Effects>Painl Fluids Tool上,开启描绘工具设置窗3在工具设置窗的描绘属性菜单部分,在可描绘属性旁,选择你想要描绘的流体属性如果选择的属性没有设置动力学或静态栅格,你将被提示设置它.4选择笔刷轮廓,进行描绘,详细请看应用工匠描绘工具在Maya的paintingu章中5修改笔刷属性设置,请看Paint Fluids Fool设置,6拖动交叉的流体区域在3D容器中描绘在3D容器中描绘,你实际上是在容器中进行一个二维切片中描绘,你描绘区域是一个X,Y或Z的平面,一个邻近的切片聚集在一起就是3D流体当你选择流体描绘工具时一个切片就显示在目标流体容器中,这是切片是用虑线表示的一个平面,流体操作器在一个角落,当你在切片指示器上移动移动指视器改变笔刷就可以描绘了切片轴向,相对于你的关查或者是轴向颜色改变轴向可惯作法能够描绘不同角度的属性值你可以控制切片的位置和厚度,你能用流体的操作器表现在一个角落,详细请看,在3D容器中显示次体积在3D流体容器中描绘流体属性1. 选择流体容器2. 选择Fluid Effects>Paint Fluids Tool””开启流体描绘工具选择3. 在工具设置窗口的描绘属性菜单中,在描绘属性旁,选择你想要的描绘的流体属性.如果选择的流体属性设有设置动力学或静态栅格,你将被提示设置.4. 选择笔刷轮廓,描绘,详细请看应用工匠描绘工具在MAYA 的Painting章5. 个性描绘属性设置,详细请看流体描绘工具设置6. 在你要描绘的平面显示切7. 换8. 在你要描绘的切9. 换和和上领着特定的轴拖动,移动,在帮助行精确的显示,选择的切10. 换,例如:Fluid Slice Location:4.000(这个数字与流体切换各轴纵深对应,开始数字是0,如果容器纵深是10,10,10, 那么切换数字是0-9)11. 拖动笔刷交叉切12. 换描绘通过多重切换1. 进行上面的第1步到第6步2. 点击目标3. .图标4. ,拖动放缩盒子,增大或减小切5. 换数目来影响笔刷描绘6. 在你想描绘的切7. 片的特定轴向上拖动,移动箭头8. 在描绘流体设置编辑中的Stroke部分,增大Stam p Depth(3D)值,到足够所选切9. 片,笔刷准备10. 反馈标11. 志被显示.12. 如果你设置的笔刷厚度在suh-volune(次体积)的深吸有Suhvolum e将被描绘Flooding,溢出淹没一个容器就像由一个大的刷子指定所有的体积像素.当你溢一个流体容器,体积像素值将作为可描绘属性改变,根据变化值为淹没工具运算.淹没整个容器1选择流体容器2选择你想淹没的容器,可描绘属性3选择这个要求描绘的运算和值4用目标操作器在它的默认位置,点击Ftood淹没淹没次体积1选择流体容器2选择你想淹没的容器的可描绘属性3选择想要描绘的操作运算和值4点击目标操作器一下,定义次体积拖动尺寸手柄定义次体尺寸拖动箭头手柄移动次体积尺寸到希望大小5点击Ftood(淹没)淹没选择切片下面是描绘流体属性在2D流体容器中,注意代替描绘中的步骤下点击Flood(按钮)热键Alt对光滑值之间的过渡选择光滑的描绘操作和淹没容器,次体积或选择切片描绘间的例带当你想得到一个动力学感觉而进行倒带时你可以描绘一个流体,例如:你让密度和手表运动来描绘它的速度注意:你不能存储定义区域,当你在倒带间开始描绘,任何在倒带间描绘的事物都会消失.贴图属性你可以为积体像素指定贴图属性值。
TPO-30 Reading 3 阅读译文

The Invention of the Mechanical Clock机械中的发明In Europe, before the introduction of the mechanical clock, people told time by sun (using, for example, shadow sticks or sun dials) and water clocks. Sun clocks worked, of course, only on clear days; water clocks misbehaved when the temperature fell toward freezing, to say nothing of long-run drift as the result of sedimentation and clogging. Both these devices worked well in sunny climates; but in northern Europe the sun may be hidden by clouds for weeks at a time, while temperatures vary not only seasonally but from day to night.在欧洲,在机械表被引入以前,人们利用太阳(比如棍子的影子和日晷)和水来确定时间。
当然,太阳钟表只能用于晴天,而水钟表在水温下降到冻结的时候会出错,会出现没有任何长期漂浮的东西会出现漂浮或者堵塞。
这两种仪器在阳光充裕的气候都运行的很好,但在北欧,太阳可能会藏在云后长达一周,同时,温度不仅会在季节中变化,也会从早到晚的变化。
Medieval Europe gave new importance to reliable time. The Catholic Church had its seven daily prayers, one of which was at night, requiring an alarm arrangement to waken monks before dawn. And then the new cities and towns, squeezed by their walls, had to know and order time in order to organize collective activity and ration space. They set a time to go to sleep. All this was compatible with older devices so long as there was only one authoritative timekeeper; but with urban growth and the multiplication of time signals, discrepancy brought discord and strife. Society needed a more dependable instrument of time measurement and found it in the mechanical clock.中世纪欧洲使得可靠的时间变得更重要。
Philips 439P9H 32 10 SuperWide 曲面显示屏说明书

Philips Brilliance32:10 SuperWide curved LCD displayP Line43 (43.4" / 110.2 cm diag.)3840 x 1200439P9HWide open possibilitieswith two high-performance monitors in onePhilips 43” curved 32:10 SuperWide display is like two full-size high-performancemonitors in-one. Productivity enhancing features like USB-C and pop-up webcam with Windows Hello deliver performance and convenience you expect.Expand your horizons•32:10 SuperWide designed to replace multiscreen setups •MultiView enables simultaneous dual connection and view •1800r curved display for a more immersive experience •Effortlessly smooth action with Adaptive-Sync technology Optimal Connectivity•Built in USB-C docking station•Built-in KVM switch to easily switch between sources Designed for the way you work•Securely sign in with pop-up webcam with Windows Hello™•DisplayHDR 400 for more lifelike and outstanding visuals •Less eye fatigue with Flicker-free technology •LowBlue Mode for easy on-the-eyes productivity•Tilt, swivel and height-adjust for an ideal viewing positionHighlights32:10 SuperWide32:10 SuperWide 43" screen, with 3840 x 1200 resolution, is designed to replace multiscreen setups for massive wide view. It's like having two 16:10 displays side-by-side. SuperWide monitors offer screen area of dual monitors without the complicated setup.Adaptive-Sync technologyGaming shouldn't be a choice between choppy gameplay or broken frames. Get fluid, artifact-free performance at virtually any framerate with Adaptive-Sync technology, smooth quick refresh and ultra-fast response time.MultiView technologyWith the ultra-high resolution PhilipsMultiView display you can now experience a world of connectivity. MultiView enables active dual connect and view so that you can workwith multiple devices like a PC and notebook simultaneously, for complex multi-tasking.1800r Curved displayInnovative curved display offers less image distortion, a wider field of view, reduced glare, and more comfort for eyes.Built in USB-C docking stationThis Philips display features a built-in USB type-C docking station with power delivery. Its slim, reversible USB-C connector allows for easy, one-cable docking. Simplify by connecting all your peripherals like keyboard, mouse and your RJ-45 Ethernet cable to the monitor's docking station. Simply connect yournotebook and this monitor with a single USB-C cable to watch high-resolution video and transfer super-speed data, while powering up and re-charging your notebook at the same time.MultiClient Integrated KVMWith MultiClient Integrated KVM switch, you can control two separate PCs with onemonitor-keyboard-mouse set up. A convenient button allows you to quickly switch between sources. Handy with set-ups that require dualPC computing power or sharing one large monitor to show two different PCs.Windows Hello™ pop-up webcamPhilips' innovative and secure webcam pops up when you need it and securely tucks back into the monitor when you are not using it. The webcam is also equipped with advanced sensors for Windows Hello™ facialrecognition, which conveniently logs you into your Windows devices in less than 2 seconds, 3 times faster than a password.DisplayHDR 400VESA-certified DisplayHDR 400 delivers a significant step-up from normal SDR displays. Unlike, other 'HDR compatible' screens, true DisplayHDR 400 produces astonishingbrightness, contrast and colors. With global dimming and peak brightness up-to 400 nits, images come to life with notable highlights while featuring deeper, more nuanced blacks. It renders a fuller palette of rich new colors, delivering a visual experience that engagesyour senses.Issue date 2023-03-23 Version: 7.0.212 NC: 8670 001 60105 EAN: 87 12581 75956 8© 2023 Koninklijke Philips N.V.All Rights reserved.Specifications are subject to change without notice. Trademarks are the property of Koninklijke Philips N.V. or their respective owners.SpecificationsPicture/Display•LCD panel type: VA LCD•Adaptive sync•Backlight type: W-LED system•Panel Size: 43.4 inch / 110.2 cm•Display Screen Coating: Anti-Glare, 2H, Haze 25%•Effective viewing area: 1052.3 (H) x 328.8 (V) mm - at a 1800R curvature*•Aspect ratio: 32:10•Maximum resolution: 3840 x 1200 @ 100 Hz*•Pixel Density: 93 PPI•Response time (typical): 4 ms (Gray to Gray)*•Brightness: 450 cd/m²•Contrast ratio (typical): 3000:1•SmartContrast: 80,000,000:1•Pixel pitch: 0.274 x 0.274 mm•Viewing angle: 178º (H) / 178º (V), @ C/R > 10•Picture enhancement: SmartImage•Display colors: Color support 1.07 billion colors •Color gamut (min.): BT. 709 Coverage: 99%*, DCI-P3 Coverage: 95%*•Color gamut (typical): NTSC 105%*, sRGB 123%*, Adobe RGB 91%*•HDR: DisplayHDR 400 certified (DP / HDMI)•Scanning Frequency: 30 - 150 kHz (H) / 48 - 100 Hz (V)•SmartUniformity: 93 ~ 105%•Delta E: < 2 (sRGB)•sRGB•Flicker-free•LowBlue Mode•EasyReadConnectivity•Signal Input: DisplayPort 1.4* x 2; HDMI 2.0b x 1; USB-C 3.2 Gen 1 x 2 (upstream, power delivery up to 90W)•HDCP: HDCP 2.2 (HDMI / DP), HDCP 1.4 (USB-C)•USB:: USB-C 3.2 Gen 1 x 2 (upstream), USB 3.2 x 4 (downstream with 1 fast charge B.C 1.2)•Audio (In/Out): Headphone out•RJ45: Ethernet LAN up to 1G*•Sync Input: Separate SyncUSB•USB-C: Reversible plug connector•Super speed: Data and Video transfer•DP: Built-in Display Port Alt mode•Power delivery: USB PD version 3.0•USB-C max. power delivery: Up to 90W* (5V/3A; 7V/3A; 9V/3A; 10V/3A;12V/3A; 15V/3A; 20V/3.75A; 20V/4.5A)Convenience•Built-in Speakers: 5 W x 2•Built-in webcam: Pop-up 2.0 megapixel FHD camera with microphone and LED indictor (for Windows 10 Hello)•MultiView: PBP (2x devices)•User convenience: SmartImage, Input, User, Menu, Power On/Off•Control software: SmartControl•OSD Languages: Brazil Portuguese, Czech, Dutch,English, Finnish, French, German, Greek,Hungarian, Italian, Japanese, Korean, Polish,Portuguese, Russian, Simplified Chinese, Spanish,Swedish, Traditional Chinese, Turkish, Ukrainian•Other convenience: Kensington lock, VESA mount(100x100mm)•Plug & Play Compatibility: DDC/CI, Mac OS X,sRGB, Windows 10 / 8.1 / 8 / 7Stand•Height adjustment: 130 mm•Swivel:-/+20 degree•Tilt: -5~10 degreePower•ECO mode: 36.2 W (typ.)•On mode: 41.8 W (typ.) (EnergyStar 8.0 testmethod)•Standby mode: 0.4 W (typ.)•Off mode: Zero watts with Zero switch•Energy Label Class: G•Power LED indicator: Operation - White, Standbymode- White (blinking)•Power supply: Built-in, 100-240VAC, 50-60HzDimensions•Product with stand(max height): 1058 x 560 x303 mm•Product without stand (mm): 1058 x 361 x137 mm•Packaging in mm (WxHxD): 1150 x 525 x 350 mmWeight•Product with stand (kg): 14.37 kg•Product without stand (kg): 10.34 kg•Product with packaging (kg): 20.19 kgOperating conditions•Temperature range (operation): 0°C to 40 °C•Temperature range (storage): -20°C to 60 °C•Relative humidity: 20%-80 %•Altitude: Operation: +12,000ft (3,658m), Non-operation: +40,000ft (12,192m)•MTBF (demonstrated): 70,000 hrs (excludedbacklight)Sustainability•Environmental and energy: EnergyStar 8.0,EPEAT*, TCO Certified, RoHS, WEEE•Recyclable packaging material: 100 %•Post consumer recycled plastic: 35%•Specific Substances: PVC / BFR free housing,Mercury freeCompliance and standards•Regulatory Approvals: CE Mark, FCC Class B,UKRAINIAN, ICES-003, CU-EAC, TUV/GS, TUVErgoCabinet•Front bezel: Black•Rear cover: Black•Foot:Black•Finish: TextureWhat's in the box?•Monitor with stand•Cables:HDMI cable,DP cable, USB-C to C/A,Power cable•User Documentation*Radius of the arc of the display curvature in mm*The maximum resolution works for either USB-C, DP or HDMIinput.*Response time value equal to SmartResponse*BT. 709 / DCI-P3 Coverage based on CIE1976*NTSC Area based on CIE1976*sRGB Area based on CIE1931*Adobe RGB Coverage based on CIE1976*DisplayPort 1.4 version is for HDR*Activities such as screen sharing, on-line streaming video and audioover the Internet can impact your network performance. Yourhardware, network bandwidth and its performance will determineoverall audio and video quality.*For USB-C power and charging function, your Notebook/devicemust support USB-C standard Power Delivery specifications. Pleasecheck with your Notebook user manual or manufacturer for moredetails.*For Video transmission via USB-C, your Notebook/device mustsupport USB-C DP Alt mode*USB-C max. power delivery: 1st USB-C port can support to 75 Wand 2nd USB-C port can support to 15 W.*If your Ethernet connection seems slow, please enter OSD menuand select USB 3.0 or higher version which can support the LANspeed to 1G.*EPEAT rating is valid only where Philips registers the product. Pleasevisit https:/// for registration status in your country.*The monitor may look different from feature images.。
航海英语机密
HH1091ECDIS:Electronic Chart Display and Information System电子海图显示与信息系统MMSI:Maritime Mobile Service Identify 海上移动识别码AIS:Automatic Identification System 船舶自动识别系统VDR:Voyage Data Recorder 航次数据记录仪(黑匣子)GPS: Global Position System 全球定位系统INMARSAT: International Maritime Satellite国际海事卫星组织EmS:Emergency Procedures for Ships Carrying Dangerous Goods 船载危险品应急程序MFAG:Medical First Aid Guide 医疗急救指南IMDG:International Maritime Dangerous Goods国际海上危险货物运输规则(国际危规)IMO:International Meteorological/Maritime Organization国际气象/海事组织IHO:International Hydrographic Organization国际水道测量组织UKHO: United Kingdom Hydrographic Office英国海道测量局MSA: Measurement System Analysis 测量系统分析MSC: Maritime Safety Committee 海上安全委员会STCW: International Convention on Standards of Training, Certification and Watch keeping for Seafarers 海员培训、发证和值班标准国际公约SOLAS: International Convention on the Safety of Life at Sea 国际海上人命安全公约MARPOL: Maritime Agreement Regarding Oil Pollution .国际防油污公约GMDSS:Global Maritime Distress and Safety System 全球海上遇险与安全系统RADAR: Radio Detecting And Ranging 雷达ARPA: Automatic Radar Plotting AIDS自动雷达标绘仪IACS:International Association of Classification Societies 国际船级社协会PSC:Port State Control 港口国监督(检查)TSS:Traffic Separation Schemes 分道通航制DSC:Digital Selective Calling 数字选择性呼叫EGC: Enhanced Group Call 增强群呼VHF:Very High Frequency 甚高频货舱通风系统:Cargo Tank Ventilation System潮汐基准面:The Tides Datum分道通航制:Traffic Separation Schemes让路船:Give-way Vessel 直航船:Stand-on Vessel最概率船位:The probability of locality/The most probable rate ship position英版航海通告:Admiralty Notice to Mariners恒向线:Rhumb Line大圆航线:Great Circle Course紧急局面:An Emergency Situation气象预报与导航:Weather Forecast and Navigation气象报告与气象定线:Weather Reports and Weather Routing避让行动:Avoidance action避碰规则:Regulations for Preventing Collisions船舶行动规则:Ship action rules海上消防:Fire-fighting at Sea英版潮汐表:Admiralty Tide Table英版灯标雾号表:Admiralty List of Lights and Fog Signal锚泊与靠离泊作业1.、__A____is not a step for anchoring preparation.A.To take off the covers from the hawse pipes and clear the spurling pipesB.To make sure that the windlass is out of gear and the brakes are on C.To turn the windlass over slowlyD.To inform the engine room to ensure that deck power and water are off2、A “Mediterranean moor”should be used when ___B___. A.anchoring in the Mediterranean B.docking stern to a berth C.docking bow to a berth D.anchoring in a strong current3、A ____A__ is the intersection of the surface of a sphere球体的and a plane passing through the center of the sphere.A.great circle B.small circle C.large circle D.general circle4、A check line校对线is __C____.A.A safety line attached to a man working over the side B.Used to measure water depthC.Used to slow the headway of a barge D.Used to measure the overhead height of a bridge5、A Danforth lightweight anchor does NOT hold well in which type of bottom丹福思一个轻量级的锚不好好把握在哪种类型的底部___B_____.A.Mud B.Grass C.Sand D.Clay6、A mooring line is described as being 6x24,1-3/4 inch wire rope一个系泊浮线被描述为6 x24,1-3/4英寸钢丝绳.What do the above numbers refer to ___B_____.A.Strands,yarns,circumference B.Strands,wires,diameterC.Wires,yarns,diameter D.Strands,circumference,wires7、A pilot vessel on pilotage duty at night will show sidelights and a sternlight __C____.A.When at anchor B.Only when making wayC.At any time when underway D.Only when the identifying lights are not being shown8、A pilot vessel on pilotage duty shall show identity lights __D____.A.At any time while underway B.While at anchor C.While alongside a vessel D.All of the above9、A ship will always want to settle into a position where __B____.A.the pivot point and point of influence of wind in are not in alignmentB.the pivot point and point of influence of wind in are in alignmentC.the point of influence of wind moves depending on the profile of the ship presented to the windD.the ship steams slowly in rough seas10、A sufficient amount of chain must be veered when anchoring a vessel to ensure ___B___.A.The vessel has enough room to swing while at anchor B.The anchor flukes bite into the ocean bottomC.There is a sufficient scope of chain to keep the anchor on the bottomD.There is more chain out than there is in the chain locker11、A tug is to assist in docking an oceangoing vessel on a hawser.The greatest danger to the tug is __D____.A.From the ship's propeller when making up aft B.From being overrun if making up forward C.Hull damage while alongside passing a hawser D.Getting in a tripping绊跌position12、A vessel brought alongside should be fended off the towing挡住了拖曳vessel by ___C___.A.crew members using their arms B.crew members using the strong muscles of their legs C.fenders挡泥板(fender的复数);防撞垫D.no fending is necessary due to the rugged construction of most towing vessels.13、A vessel moored with two anchors,sometimes,at an exposed roadstead开淌的港外锚地to _D_____.A.Aid turning the ship B.Obtain a fine bearingC.Increase ship swings to wind or tide D.Lighten the stress of anchor chains减轻压力的锚链14、After casting off解缆moorings at a mooring buoy in calm weather,you should ______.A.Go full ahead on the engine(s) B.Back away a few lengths to clear the buoy and then go ahead on the enginesC.Go half ahead on the engines and put the rudder hard rightD.Go half ahead on the engines and pass upstream of the buoy15、All the following is true except that _B_____.A.in many places a counter current flows in opposition to the main current close to the bankB.current can vary with depth of water and large deep draught ships can experience different current effects at differing parts of the hull tend to turn to the wind电流可以随深度变化的水和大型深吃水船可以体验不同的电流效应在不同部位的船体往往会用风C.as speed is reduced,the increased proportion of the ship's vector which is attributable to current will set the ship close to obstructions D.when close to the berth in a head current,there is a danger that flow inshore of the ship becomes restricted and the ship is subject to interactive forces16、Before letting the anchor go,you should check that the __D____.A.Chain is clear B.Anchor is clear of obstructions C.Wildcat is disengaged D.All of the above1 17、Consideration should be given in planning for the mooring orientation in a new location so that in adverse weather a crane is available to off-load the supply vessel on what side of the unit ___B_____.A.Weather side B.Leeward side背风面C.Upwind side逆风侧D.Crosswind side18、Conventional anchors are least likely to hold in a bottom consisting of __C____.A.soft clay B.hard mud C.very soft mud D.sand19、Galvanizing would not be suitable for protecting wire rope镀锌不适合用于保护钢丝绳which is used for __A____.A.Cargo runners B.Mooring wires C.Shrouds D.Stays20、If a ship has sternway,with accommodation block aft,she may settle with the wind __D____.A.on her beam B.on her stern C.on her bow D.broad on the quarter沿海与大洋航行1、__D____ is not a type of IALA maritime buoyage system.A.special marks B.isolated danger marks C.cardinal marks D.fore and aft marks2___B___ is prohibited in this are a.A.Anchor B.Anchoring C.Anchored D.Being anchored3、A head on situation shall be deemed to exist at night when a power-driven vessel sees another power-driven vessel ahead and ___D___. A.One sidelight and the masthead light are visible B.The vessels will pass closer than half a mileC.Both vessels sound one prolonged blast D.Both sidelights and masthead light(s)are visible 4、A sailing vessel shall not impede the safe passage of a __D____. A.power-driven vessel following a traffic laneB.pilot vessel enroute to a pilot station C.law enforcement vessel D.All of the above5、A traffic separation zone is that part of a traffic separation scheme which ___D___.A.is between the scheme and the nearest land B.contains all the traffic moving in one direction C.is designated as an anchorage area D.separates traffic proceeding in one direction from traffic proceeding in the opposite direction6、A vessel may enter a traffic separation zone __D____.A.in an emergency B.to engage in fishing within the zone C.to cross the traffic separation scheme D.Any of the above7、A essel navigate in areas near the termination of traffic separation schemes shall do __D____ with particular caution. A.it B.that C.this D.so8、A vessel shall not ___D___. A.enter the traffic separation zone in an emergency B.cross a traffic laneC.engage in fishing in the separation zone D.proceed in an inappropriate traffic lane9、A vessel shall so far as practicable avoid _C_____ in a traffic separation scheme or in areas near itsterminations. A.sailing B.proceeding C.anchoring D.maneuvering10、A vessel using a traffic separation scheme shall normally join or leave a traffic lane at the __C____ of the lane. A.ended B.terminative C.termination结束,终止D.side.11、A vessel using a traffic separation scheme shall so far as practicable ___C___ a traffic separation line or separation zone.A.keep well clear B.keep very far C.keep clear of D.keep clear from12、A wedge of water building up between the bow and nearer bank which forces the bow out and away describes __A____.A.Bank cushion B.Bank suction C.Combined effect D.Bend effect13、If obliged to cross traffic lanes,a vessel shall do so on a heading as nearly as practicable __C____ to the general direction of traffic flow.A.at small angle B.at large angle C.at right angle成直角D.in same direction as14、In regions where ice conditions prevail in the winter,_B_____.A.the lantern panes of unattended lights may not become covered with ice or snowB.the lantern panes of unattended lights may become covered with ice or snow灯笼的窗格的无人值守灯光可能成为覆盖着冰雪C.ice or snow is likely caused colored D.the white lights are likely caused to appear colored 15、In the absence of a route leading from seaward,the conventional direction of buoyage generally follows ___B___.A.an anti-clockwise direction around land masses B.a clockwise direction around land masses C.an anticlockwise direction around sea masses D.a clockwise direction around sea masses16、Large vessel leaving.Keep clear __D____ approach channel.A.Off B.Reach C.From D.Of17、Mariners are reminded that they should proceed in the general direction indicated by the arrows or,if ______ a lane,they should do so as nearly as practicable at right angles to it.A.cross B.crossing C.crossed D.crosses18、Mariners proceeding across the main routes are __A____ to do so at as wide an angle as practicable.A.recommended B.reported C.applied D.complied19、One of the factors which affects the circulation of ocean currents is __B____.A.humidity B.varying densities of water C.vessel traffic D.the jet stream20、Preferred channel marks are aids to navigation which all following marks other than __C____.A.channel junctions B.bifurcations C.fishing traps D.wrecks or obstructions船舶结构与设备船体结构1、___D___ is not a longitudinal structural member.A.sideshell B.bottom shell plating C.inner bottom plating D.transverse bulkhead 2、___D___ is not a static loa d.A.Actual weight of the ship's structure,outfitting,equipment and machineryB.Ballast load(weight) C.Cargo load D.Slamming and sloshing load3、A block and tackle is rove to advantage.This means that the __C____.A.blocks have been overhauled B.hauling parts of two tackles are attached C.hauling part leads through the movable block D.hauling part leads through the standing block4、A carling is used aboard ship __B____.A.As a con necting strap between the butted ends of plating B.To stiffen areas under points of greatstress between beams C.To prevent the anchor from fouling when the brake is releasedD.To provide an extra heavy fitting in a heavy lift cargo rig5、A continuous watertight bulkhead is normally also a(n)_A_____.A.Structural bulkhead B.Exterior bulkhead C.Centerline bulkhead D.Joiner bulkhead6、A deck fitting,used to secure line or wire rope,consisting of a single body with two protruding horns is called a ___D___. A.Bitt B.Bollard C.Capstan D.Cleat7、A design modification of an anchor chain which prevents kinking is the __B____.A.Detachable link B.Stud link C.Kenter link D.Connecting link8、A set of interior steps on a ship leading up to a deck from below is known as __A____.A.A companion way B.Tween-decks C.Stairs D.Any of the above are acceptable9、A term applied to the bottom shell plating in a double-bottom ship is ___B___.A.bottom floor B.outer bottom C.shear plating D.tank top10、A vessel has sustained damage in a collision with another vessel.It is necessary to have a Seaworthy Certificate before the vessel sails.Who will issue this certificate ____B____.A.American Consul B.Classification Society C.Captain of the PortD.Officer in Charge,Marine Inspection11、Bilge keels are fitted on ships to _D_____.A.Assist in drydock alignment B.Improve the vessel's stabilityC.Protect the vessel from slamming against piers D.Reduce the rolling of the vessel12、Buckler plates are ___B___.A.Triangular-shaped plates connecting the bull chain to the topping liftB.Metal plates secured over the tops of the hawsepipes C.Faired shell plates with curvature in two directionsD.Sheets of dunnage used to prevent heavy cargo from buckling the deck plates13、Compared to internal structural plating,the exterior hull plating on a vessel is usually __A____.A.stronger B.thinner C.more corrosion resistant D.a lower grade steel15、Deck beams on a vessel are generally spaced at equal intervals and run __C____.A.longitudinally B.vertically C.transversely D.intermittently16、Deck beams perform ___C___ of the following functions in the hull structure of a vessel.①They transfer deck loads to the frames;②They help to maintain the shape of the hull.A.①only. B.②only.C.Both ①and ② D.Neither ①nor ②17、Floors aboard ship are ___B___.A.also called decks B.vertical transverse plates connecting the vertical keel with the margin platesC.large beams fitted in various parts of the vessel for additional strengthD.found in passenger and berthing spaces only18、Floors aboard ship are ___A___.A.frames to which the tank top and bottom shell are fastened on a double bottomed ship B.transverse members of the ships frame which support the decksC.longitudinal beams in the extreme bottom of a ship from which the ship's ribs startD.longitudinal angle bars fastened to a surface for strength19、For existing ships,__D____ is not an improvement to safety.A.the reinforcement of the aft transverse watertight bulkheadB.the double bottom structure in way of the foremost cargo holdC.the introduction of a more rigorous survey regime and greater attention to operating procedures D.introduction of new and improved designs20、Forecastle deck is located in the ship's __A____.A.Bow stem B.Stern C.Portside D.Starboard side船舶设备1、___D___ is not a proper instruction for handling hatch covers.A.not to obstruct clear fore-and-aft passageways B.not to obstruct coaming-to-bulwark passageways C.to be lashed or otherwise secured to prevent accidental dislodgement D.to be laid on their sides 2、__D____ is not a proper instruction for laying hatch beams.A.to be laid on their sides B.to be stood on edge close together C.be lashed D.be covered3、A deck beam does NOT ___B___. A.act as a beam to support vertical deck loadsB.lessen the longitudinal stiffness of the vessel C.act as a tie to keep the sides of the ship in place D.act as a web to prevent plate wrinkling due to twisting action on the vessel4、A fuel-air mixture below the lower explosive limit is too __B____.A.Rich to burn B.Lean to burn C.Cool to burn D.Dense to burn5、A person may operate an air compressor in which of the following areas on board a tank barge ___B_____.A.Pumproom B.Generator room C.A space adjacent to a cargo tank D.A space two meters froma cargo valve6、A safe fuel system must __C____.A.Prevent engine overheating B.Have proper air/gasoline fuel mixture ratioC.Be liquid- and vapor-tight D.Supply sufficient air to the intake manifold7、A towing vessel's capability is BEST measured by horsepower,bollard pull,maneuverability and __A____.A.displacement B.stability C.towrope pull D.propeller design8、A VLCC(100,000 DWT+)with a 30,000 Shaft Horsepower Steam Turbine is slow to respond to engine movements and has less stopping power than normal ships because it has a __B____.A.Bigger propeller B.Smaller power weight ratio C.Smaller propeller D.Larger power weight ratio9、A whipping is ___D___.A.a messengerB.a stopper for nylon line C.a U-bolt for securing a cargo whip to the winch drum D.turns of twine around a rope end10、A whipping on a fiber line _A_____.A.keeps the ends from fraying B.strengthens it C.protects your hands D.becomes part of a splice 11、All diesel engines are classified as ___B___.A.Four cycle B.Compression ignition C.Vacuum ignition D.External combustion12、All echo-sounders can measure the __B____. A.Actual depth of water B.Actual depth of water below keelC.Average depth from waterline to hard bottom D.Average depth of water to soft bottom13、All marine low-speed diesels are of what design ___B_____.A.Four-stroke B.Two-stroke C.Electronic ignition D.Forced exhaust14、All of the following steps are taken in starting a centrifugal pump,EXCEPT to _A_____.A.Set the relief valveB.Check the lubrication system C.Vent the pump casing D.Open the pump suction and discharge valves15、An anchor winch should be equipped with mechanical brakes capable of holding __B____.A.half the breaking strength of the mooring line B.the full breaking strength of the mooring line C.the maximum expected tension of the mooring line D.50% over the working tension of the mooring line16、An example of a messenger is a __B____.A.fairlead B.heaving line C.stay D.warp17、An example of a modern anchor which has a stock is a(n)__D____.A.Articulated anchor B.Flipper Delta anchor C.Baldt anchor D.Danforth anchor18、An LWT anchor often has difficulty tripping in __B____.A.Sand B.Soft soil C.Stiff clay D.Heterogeneous soil19、Anchor shackles should have a breaking strength that is __A____.A.equal to the chains they are connecting B.25% more than the chains they are connecting C.50% more than the chains they are connecting D.100% more than the chains they are connecting 20、Anchors are prevented from running out when secured by the __B____.A.Brake B.Devil's claw C.Pawls D.All of the above雷达及ARPA的使用1、____A__ is not a job of the radar antenn a.A.T o receive the high-frequency pulses from the transmitterB.To focus the pulses into a beam,and send them into space C.To pick up reflected pulses coming from objects that have been struck by the beam D.To reflect microwaves2、__D____ is not used in modern radar.A.EBL B.VRM C.CRT D.Grease pencil3、__D____ typically extends from close as 0.1 nautical miles out to 32 NM.A.EBL B.VRM C.CRT D.target tracking range4、Although manual plotting for CPA works well,the workload can become overwhelming when confronted with ___D___.A.one target B.two targets C.three targets D.a large number of targets5、I ___C___ shorebased radar assistance.A.Ask B.Look for C.Require D.In need of6、In fog you observe your radar and determine that risk of collision exists with a vessel which is 2 miles off your port bow.You should __D____. A.stop your engines B.sound the danger signal at two-minute intervalsC.hold course and speed until the other vessel is sighted D.take avoiding action as soon as possible 7、My radar is not working.I require shore based radar assistance.Is shore based radar assistance ___B_____?A.used B.available C.in use D.can be used8、PPI is __A____.A.a plan-position indicator system B.pulse-plan integration C.pulse-pulse inputD.power-plan input9、Radar makes it possible and much safer for us to sail ___A___.A.In dense fog B.In boisterous weather C.In the open sea D.In rivers10、Radar reflectors are required for ___D___.A.all fishing vessels over 39 feet in length B.sail-propelled fishing vesselsC.all fishing vessels of less than 200 GT D.wooden hull fishing vessels with a poor radar echo 11、SWEEP INT on radar panel is the abbreviation of __D____.A.sweep introduction B.sweep interest C.sweep intention D.sweep intensity12、The ___A___ has a built-in world map; most areas are displayed on a scale of 4000 nm from the top to the bottom of the screen,and can be zoomed in to 150nm.A.chartplotter B.C-MAP NT C.C-Cards D.PPI13、The 10-cm radar as compared to a 3-cm radar of similar specifications will __C____.A.Be more suitable for river and harbor navigation B.Provide better range performance on low lying targets during good weather and calm seas C.Have a wider horizontal beam width D.Have more sea return during rough sea conditions14The articulated light is superior to other types of buoys because ___D___.A.The radar reflectors reflect better signals B.Fog horn signals travel farther to sea C.It is equipped with strobe lights D.It has a reduced watch circle15、The closest point of approach(CPA)of a contact on a relative motion radar may be determined ___C___.A.Immediately when the contact is noted on radar B.Only if the radar scope is watched constantly C.After the contact has been marked at least twice D.By an occasional glance at the radar16、The correct method of switching off a marine radar is to turn power switch to __B___ position first,then to ______ position. A.Off/standby B.Standby/off C.Standby/close D.Close/standby 17、The development of ___B___ led to the fully automatic ARPA systems installed on commercial ships.A.SeaTalk B.powerful microprocessors and mega memory capacity C.chartplotter D.small-scale chart18、The radar control that reduces weak echoes out to a limited distance from the ship is the __A____.A.sensitivity time control(sea-clutter control)B.receiver gain control C.brilliance control D.fast time constant(differentiator)19、The radar control used to reduce sea return at close ranges is the __B____.A.Gain control B.Sensitivity time control C.Fast time constant D.Pulse length control 20、The radio waves used for radar are very short,only __A____ long.A.A few centimeters B.A few fathoms C.A few meters D.A few feet磁罗经与陀螺罗经的使用1、A ship under construction or major repair will acquire permanent magnetism due to ___A___ while sitting stationary in the earth's magnetic fiel d.A.hammering and jarring B.vibration and pounding C.varying magnetic fieldsD.stable or permanent magnetism of the ship2、A vessel is heading magnetic east and its magnetic compass indicates a heading of 086°.Which action should be taken to remove this error during compass adjustment ____A____.A.If the blue ends of the magnets are aft,and the fore-and-aft tray is at the top,you should add some magnetsB.If the blue ends of the magnets are aft you should lower the fore-and-aft trayC.If the blue ends of the magnets are aft,and the fore-and-aft tray is at the top,you should reverse the magnetsD.If the blue ends of the magnets are forward,and the fore-and-aft tray is at the bottom,you should add some magnets3、A vessel is heading magnetic northwest and its magnetic compass indicates a heading of 312°.What action should be taken to remove this error during compass adjustment ___A_____.A.If the quadrantal spheres are all the way out,replace them with smaller spheresB.If the quadrantal spheres are all the way in,replace them with larger spheresC.If the quadrantal spheres are all of the way out,move the spheres inD.If the quadrantal spheres are all the way out,replace them with larger spheres4、Any piece of metal on becoming magnetized will develop regions of concentrated magnetism called __B____.A.flux B.poles C.magnets D.azimuth5、By convention,the north seeking ends of a compass' magnets are colored ___C___.A.Black B.Blue C.Red D.White6、If a ship is proceeding towards the magnetic equator,the uncorrected deviation due to permanent magnetism __C____.A.Increases B.Remains the same C.Decreases D.Is unimportant and may be neglected 7、In more recent years,__A____ has been used by civilians in many new ways to determine positions,such as in automobile and boat navigation,hiking,emergency rescue,and precision agriculture and mining.A.GPS B.GMDSS C.AIS D.Navtex8、Indications of the master gyrocompass are sent to remote repeaters by the _B_____.A.Follow-up system B.Transmitter C.Phantom element D.Azimuth motor9、Lines on a chart which connect points of equal magnetic variation are called __D____.A.Magnetic latitudes B.Magnetic declinations C.Dip D.Isogonic lines10、Magnetic variation changes with a change in __D____.A.the vessel's heading B.sea conditions C.seasons D.the vessel's position11、The agonic line on an isomagnetic chart indicates the _C_____.A.Magnetic equator B.Magnetic longitude reference line C.Points where there is no variation D.Points where there is no annual change in variation12、The angular difference between the true meridian(great circle connecting the geographic poles)and the magnetic meridian(direction of the lines of magnetic flux)is called ___B___.A.deviation B.variation C.error D.difference13、The compass error of a magnetic compass that has no deviation is ___B___.A.Zero B.Equal to variation C.Eliminated by adjusting the compass D.Constant at any geographical location14、The difference between magnetic heading and compass heading is called ___B___.A.Variation B.Deviation C.Compass error D.Drift15、The error in a magnetic compass caused by the vessel's magnetism is called __B____.A.Variation B.Deviation C.Compass error D.Bearing error16、The Flinders bar and the quadrantal spheres should be tested for permanent magnetism at what interval ____C____.A.They are not subject to permanent magnetism; no check is necessary B.Semiannually C.Annually D.Every five years17、The Flinders bar on a magnetic compass compensates for the __A____.A.Induced magnetism in vertical soft iron B.Induced magnetism in horizontal soft iron C.Permanent magnetism in ship's steel D.Vessel's inclination from the vertical18、The gyrocompass error resulting from your vessel's movement in OTHER than an east-west direction is called __D____.A.Damping error B.Ballistic deflection C.Quadrantal error D.Speed error19、The line which connects the points of zero magnetic dip is ___B___.A.An agonic line B.The magnetic equator C.A magnetic meridian D.All of the above20、The magnetic compass magnets are acted on by the horizontal component of the Earth's total magnetic force.This magnetic force is GREATEST at the ____D__. A.north magnetic pole B.south magnetic poleC.magnetic prime vertical meridian D.magnetic equatorGPS – DF – LC的使用1、___B___ is a digitized“picture”of a chart.A.Vector chart format B.Raster chart data C.pixel D.Electronic Nautical Chart2、___A___ is not a factor which will affect the accuracy of GPS receiver.A.detective Availability B.local environmental conditions C.autonomous mode versus differential correction mode versus RTCM mode D.the averaging of recorded locations3、___C___ is not an alarm required by IMO standards to be available on the ECDIS. A.Deviating froma planned route B.Approach to waypoints and other critical points C.Light house detecting D.Larger scale chart available4、___D___ is on the panel of DF. A.RINGS INT B.SWEEP INT C.REPEATER D.GONIOMETER5、__A____ is on the panel of DF.A.ZERO CLEARING B.ANTI-CLUTTER-RAIN C.DIMMER D.CURSOR6、___D___is not a component of GPS. A.H e space component B.Control component C.User component D.Alarming component7、A compass card without north-seeking capability that is used for relative bearings is a(n)__B____.A.Bearing circle B.Pelorus C.Bearing bar D.Alidade8、A single vertical magnet placed underneath the compass in the binnacle is used to compensate for __B____.A.The horizontal component of the permanent magnetism B.Deviation caused by the vessel's inclination from the vertical C.Induced magnetism in the horizontal soft iron D.Induced magnetism in the vertical soft iron9、A system of reservoirs and connecting tubes in a gyro compass is called a ___B___.A.Spider element B.Mercury ballistic C.Gyrotron D.Rotor10、After abandoning a vessel,water that is consumed within the first 24 hours will ___A___.A.Pass through the body with little absorbed by the system B.Help to prevent fatigue C.Quench thirst for only 2 hours D.Help to prevent seasickness11、AMVER is a system which provides __A____.A.satellite communications B.navigational information C.weather information D.position reporting service12、At the master gyrocompass,the compass card is attached to the ___B___.A.Spider element B.Sensitive element C.Link arm D.Pickup transformer13、Automatic identification systems(AIS)are required to __D____.A.provide safety-related information automatically to shore stations,other vessels and aircraft B.receive safety-related information automatically from similarly equipped vessels。
测绘常用专业英语词汇

Absolute error绝对误差Absolute orientation 绝对定向Accident error随机误差,偶然误差Active remote sensing 主动式遥感Addition constant加常数Adverse 不利的,敌对的,相反的Aerial photography 航空摄影Aerial photogrammetry 航空摄影测量Aerial triangulation 空中三角解析Alidade 照准仪Alignments survey 定线测量Allowance容许误差Angle closing error of traverse导线角度闭合差Annexed leveling line附合水准路线Antenna 天线Apportion分配Attribute属性Atomic clock 原子钟As-built survey竣工测量Automatic level自动安平水准仪Average error 平均误差Azimuth方位,方位角Backsight(BS)后视Barometric leveling 气压水准测量Blunder粗差,失误BM(benchmark)水准点Bounce 使反跳Bridge survey桥梁测量Broadcast ephemeris广播星历Buffering 缓冲Building axis survey 建筑轴线测量Building engineering survey 建筑工程测量Cadastral surveying 地籍测量Cadastre 地籍Calibration 校准,标度,刻度Cartography 地图制图学Cartographyer 地图制作者Celestial 天上的Celestial sphere 天球Clockwise顺时针方向的Clock error 种差Closed leveling line闭合水准路线Closed loop traverse 闭合环导线Closed traverse 闭合导线Closing error in coordinate increment 坐标增量闭合差Closure / closing error 闭合差Compensator level 自动安平水准仪Computer graphics 计算机图形学Connecting traverse 附合导线Constant error 常查Construction control network 施工控制网Construction plan 施工平面图Construction survey施工测量Contours等高线Control network控制网Control Point控制点Control segment 控制部分Control survey 控制测量Control network for deformation observation变形观测控制网Counterclockwise 逆时针方向的Cross section 横断面Cross section survey横断面测量Curvature 曲率,弯曲Date recorder电子手薄Date transfer数据转换Datum基准面Demographic 人口统计学Departure 差异,相差,矛盾Depression Angle 俯角Detail survey碎部测量Deviation 偏差,偏移Diameter直径Differential leveling 微差水准测量Differential gps 差分gpsDifferential correction 差分改正Digitize 将资料数字化Digitizer 数字转化器Digital orthophoto map 数字正射影像图Dimensional 空间的Direct leveling 几何水准测量Discrete 离散的Discrepancy 差异Distance measurement 距离测量Distance measuring instrument 测距仪Distance-measuring error 测距误差Distinguish 区别EDM(electronic distance measurement)电子测距仪Electromagnetic 电磁的Electromagnetic distance measuring instrument 电磁波测距仪Electronic level电子水准仪Electronic theodolite 电子经纬仪Electro-optical distance measuring instrument 光电测距仪Electromagnetic spectrum 电磁波频谱Elevation Angle高度角Elevation difference高差Elevation of sight 视线高程Eliminate 消除,排除Ellipsoid 椭圆体Engineering survey 工程测量Engineering control network 工程控制网Entity 实体Ephemeris 星历表Equator 赤道线Error of closure闭合差Error of focusing 调焦误差Error propagation 误差传播Error test 误差检验Fieldwork野外工作Fixed error固定误差Flexibility 适应性,机动性Foresight(FS) 前视Forestry 林产,森林学,林学Forward intersection前方交会Free station 自由设站法Geodetic azimuth 大地方位角Geodetic surveying 大地测量学Geographical 地理学的Geoid大地水准面Geological survey 地质测量Geology 地质学,地质概况Geomatics测绘学Geophysics 地球物理学Geoscience 地球科学GPS receiver gps接收机GPS constellation gps星座Gravimetric leveling 重力水准测量Gravity 重力,地心引力Gravity field 重力场Grid bearing 坐标方位角Gross error 粗差Gross error detection 粗差检验Gyro azimuth 陀螺方位角Height of instrument(HI)仪器高Height of target(HT)目标高Horizontal Angle水平角Horizontal circle水平刻度盘Horizontal control network平面控制网Horizontal refraction error 水平折光误差Horizontal survey 水平测量Huanghai vertical datum of 1956 1956黄海高程系统Hydrographic 与水道测量有关的Hydrographic survey 海道测量,水道测量Hydrographic engineering survey 水利工程测量Imagery 肖像,雕刻影像Implementation 执行Index error of vertical circle 竖盘指标差Inertial 惯性的,不活泼的Infrared EDM instrument 红外测距仪Instrumental error 仪器误差Intersect 相交,交叉Internal orientation 内定向Interpret 解释Ionosphere电离层Ionosphere delay 电离层延迟Land management 土地管理Land survey 土地测量Laser distance measuring instrument 激光测距仪Laser level 激光水准仪Latitude 纬度,范围Law of probability 概率论Layout放样Level 水准仪Level rod水准尺Light-emitting diode displays(LEDs)发光二极管显示Limit error 极限误差Linear intersection 边交会法Linear-angular intersection 边角交会法Liquid crystal displays(LCDs)液晶显示Longitude经度Long-range EDM instrument 远程电子测距仪Magnetic azimuth 磁方位角Marine survey 海洋测量Master control station 主控站Meridian子午线,正午,顶点Method in all combinations 全组合测角法Method of direction observation 方向观测法Microwave distance measuring instrument 微波测距仪Mine survey 矿山测量Monumentation埋石Multiplication constant 乘常数Multiply 乘,增加Multipath effect 多路径效应National vertical datum of 1985 1985国家高程基准Nominal accuracy标称精度Observation error 观测误差Open traverse 支导线Optical leveling 光学水准仪Optical theodolite 光学经纬仪Orbit 轨道Orthometric正高的Orthophotograph 正射影像Overlay覆盖Passive remote sensing 被动式遥感Perpendicular 垂直的,正交的Personal error 人为误差Photogrammetry 摄影测量学Pipe survey 管道测量Pixel 像素Plane surveying 平面测量学Plotting 标图,测绘Plumb 铅垂,铅弹Plumb line 铅垂线Post processed differential correction 后处理差分改正Precise code 精码Precision 精度Precise ephemeris 精密星历Precise ranging 精密测量Prime meridian本初子午线Prism 棱镜Probable error 或然误差Profile diagram纵断面图Profile survey 纵断面测量Projection投影,投射Propagate 传播,宣传Propagation of error误差传播Property line survey 建筑红线测量Protractor 量角器Pseudorange 伪距Public engineering survey 市政工程测量Radius 半径,范围Random error 随机误差,偶然误差Raster 光栅Real time kinematic 实时动态定位Real time Differential correction 实时差分改正Receiver antenna 借手机天线Rectangular矩形的Reference datum参考基准面Reference receiver 基准接收机Refraction 折光,折射Refraction correction 折光差改正Registration 注册,报到,登记Relative error 相对误差Relative orientation 相对定向Remote sensor 遥测传感仪Resection 后方交会Resolution 分辨度Road engineering survey 道路工程测量Route survey 路线测量Roving receiver 流动接收机Satellite laser ranger 卫星激光测距仪Satellite positioning 卫星定位Selective availability 选择可用性Setting-out survey 施工放样Sexagesimal system 六十分制Side intersection 侧方交会Site map 工地平面图Sighting distance视距Space segment 空间部分Spheroid球状体Spirit leveling 几何水准测量Spur leveling line 支水准路线Stadia 视距Stadia addition constant 视距加常数Stadia hair 视距丝,视距线Stadia interval 视距间隔Stadia multiplication constant 视距乘常数Standard field of length 长度标准检定场Survey specifications测量规范Surveying and mapping 测绘Synchronized 同步的Systematic error 系统误差Tacheometry 视距测量Tangent 相切的,切线的Telescope望远镜Terrain 地形Theodolite 经纬仪Theory of error 误差理论Tolerance 限差Topographic 地势的,地形学上的Topographic survey地形测量Total length closing error of traverse 导线全长闭合差Total station 全站仪Traverse 导线,横贯,横断Traverse Angle 导线折角Traverse leg 导线边Traverse network 导线网Traverse Point 导线点Traversing导线测量Triangle三角形Triangulateration 边角测量Triangulateration network 边角网Triangulation 三角测量Triangulation network 三角网Trigonometric leveling 三角高程测量Trigonometry 三角法Trilateration 三边测量Trilateration network 三边网Troposphere 对流层Troposphere delay 对流层延迟True error 真误差True north真北Tunnel survey隧道测量Two-color laser ranger 双色激光测距仪US department of defense 美国国防部User segment 用户部分Vector 向量Vertical Angle 垂直角Vertical circle 垂直度盘Vertical control network高程控制网Vertical survey 高程测量Visualization 可视化Zenith 天顶,顶点,顶峰Zenith distance 天顶距。
flow3d单词翻译
Vvect刚体初速度的矢量Delete source bitmap files--删除原位图文件Frame rate--帧速率A VI capture--动画捕捉A VI filename--动画文件名FLOW-3D (R) --FLOW-3D 简体中文版Interface version --接口版本Solver version--求解器版本Number of Processors--处理器数量Total Physical Memory (RAM) --物理内存总数(RAM) f3dtknux_license_file--授权许可文件Host Name--主机名F3D_VERSION --软件版本Operating System--操作系统Type--类型Porous--孔隙Porosity --孔隙率Lost foam--消失模Standard--标准Thermal conductivity--导热率Material name--材料名称Custom--自定义Surface area multiplier--面积倍增Unit system--系统单位Solid properties --固体属性Initial conditions--初始化条件Surface properties--表面属性Solids database--固体数据库Surface roughness--表面粗糙度Temperature--温度Temperature variables--温度变化Saturation temperature --饱和温度Units=CGS --单位=公制Solutal expansion coefficient --溶质膨胀系数Ratio of solute diffusion coefficient ---比溶质扩散系数Surface tension --表面张力Gas constant--气体常量Thermal conductivity --导热率Surface tension coeff--表面张力系数Critical solid fraction--关键凝固比率Solidus temperature--固相线温度Phase change--相变Material name --材料名称Thermal properties --热性质Custom --自定义Constant thinning rate--不断变薄率Units=SI -单位=国际单位制Partition coefficient--分隔系数Dielectric constant --介电常数Specific heat --比热Eutectic temperature --低共熔温度Coherent solid fraction --凝固Thermal expansion --热膨胀Unit System --系统单位Units=custom --单位=自定义Units=slugs --单位=斯勒格Reference temperature--起始温度Latent heat of vaporization--汽化潜热Reference solute concentration--参考溶质浓度Pure solvent melting temperature --熔点温度Liquidus temperature--液相温度Viscosity --黏度Solidification--凝固Vapor specific heat --蒸气比热Density--密度Temperature sensitivity--温度敏感性Saturation pressure --饱和压力Temperature shift --温度变化Compressibility --可压缩性Contact angle --接触角度Latent heat of fusion (fluid 1) --熔解潜热(流体1)New fluid database --新流体数据库Accommodation coefficient --调节系数Strain dependent thinning rate --应变黏度系数Constant thickening rate --不断增厚率added to materials database --添加到材料库cannot be added. --不能被添加Record already exists in materials database--在材料库已经存在该记录. New saved in materials database--新保存到材料库中.Could not find material DB--没有发现材料数据Add--添加Close--关闭Add Mesh Points --添加网点Direction --方向New Point --新的点Mesh Block --网格块2-D advanced options --2-D 高级选项Option--选项Add --添加Type--类型Component--组Cancel--取消Browse --浏览Source --来源File name--文件名Advanced --高级Numerics--数值运算Advanced options--高级选项sigma --表面张力系数Air entrainment --卷气Activate air entrainment model --激活卷气模型Surface tension coefficient --表面张力系数Dialog--对话框Remove mesh constrains--清除网格限制Size of all cells --全部单元尺寸Total Cells--单元总数Baffle options --隔板选项Baffle index --主隔板Baffle color--隔板颜色Hide selected baffles --隐藏选中的隔板Use contour color--使用轮廓颜色Selection method--择伐作业Boundary type --边界类型Specified pressure --规定压力Grid overlay --网格重叠Specified velocity --指定速度Electric potential--电位Stagnation pressure --滞止压力V olume flow rate --体积流量Z flow direction vector--Z 流向Y flow direction vector --Y 流向X flow direction vector--X 流向Electric charge--电荷Mesh Block--网格块Add to component --添加为元件Specific heat --比热Simulate--仿真Stop preprocessor--停止预处理Block distribution--块分配Porous--孔隙Component --组Scalars--标量Add to component --添加为元件Cell size --单元尺寸Render space dimensions --渲染面积Cell size is empty--单元尺寸为空Create mesh block (Cylindrical) --创建网格块(柱状) Total number of cells --单元数量Cylinder subcomponent --子气缸Add to component--添加为元件Radius --半径Setting the default workspace location is required. You can change the location at any time from the Preferences menu.--需要设置本地默认工作区位置.你可以随时通过菜单来改变位置。
电子海图课件 PPT
• 每一单元必须包含在物理独立、标识唯一的文件中; • 每一单元一般不超过5MB,也不能太小,避免单元过
多; • 同一航海用途的单元可能重叠,但单元内数据不能
重叠,即重叠区域内只有一个单元含数据。
Vector data: defining an area through a closed
非标准电子海图
标准电子海图
ARCS (UKHO)
RNC (NOAA)
CM93
TX97
DNC
(C-MAP) (TRANSAS) (NGA)
ENC
一、电子海图相关国际标准
Regulations in Chapter V of SOLAS
Three new main hydrographic elements may be identified in the new rules of SOLAS Chapter V:
IIMMOO
PPeerfroformrmaanncceeSStatannddaardrdssfofor rEECCDDISIS IMIMOOMMooddeel lCCoouursrsee11.2.277 SSOOLLAASSCCoonnvveenntitoionn SSTTCCWW
IHO
SS-5-522
但可以有用户加入信息的方式产生某些报警功能; 3)海图基准面和投影可能和ENC 不同; 4)海图上的特征不能被简化或移除,诸如雷达信息的叠
加;
5)不能随意选择海图显示比例; 6)RCDS的海图变向显示可能影响海图资料的读取; 7)不能设置安全等深线或等深点增亮显示; 8)不能通过查询方式获取海图物标的附加信息; 9)基于光栅扫描海图,不同的颜色可能用于显示
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Real time 3D display of hydrographic data for QA and QC.Roland ArsenaultCenter for Coastal and Ocean Mapping & Joint Hydrographic CenterUniversity of New Hampshireroland@Figure 1 – Data collected from a Simrad EM1002 in the Gulf of Mexico. The main window shows an overview of recent data collected, while the subwindow shows a close-up view of a diagram representing the ship and its attitude.AbstractA real time gridding system (RTG) is being developed to enable real time quality control during multibeam sonar surveys. RTG displays georeferenced, gridded data as it is collected from the multi-beam sonar. The system is capable of integrating historic data, such as charts, DTM's and sidescan sonar images, while building a surface that grows as the new data is being collected, all in a georeferenced 3D environment. Other data, such as position and attitude of the ship or towed vehicle can also be displayed in real time in order to give the user a full picture of the complete data acquisition process as it is happening. The real time display of geo-referenced sounding data is an invaluable tool for identifying both systematic artifacts and outliers. The technology thatenables RTG consists of a dynamically growing surface that is gridded on-the-fly and realtime display using variable resolution to maintain interactivity with the system. A number of display modes have been implemented, including displaying of all soundings, displaying the median surface or shoal-biased surface. Both the derived DTM and the underlying soundings can be displayed simultaneously revealing the relationship between the soundings and the DTM. IntroductionIn a complex system such as a multibeam sonar survey system, it is very difficult to eliminate all sources of errors. Some of these errors can be corrected if discovered early enough. It is therefore crucial to pinpoint and correct as many errors as possible, as early as possible to increase data quality, and reduce the amount of error correction necessary in post processing.This problem came to my attention on my first multibeam survey cruise, a multibeam survey of the Pinnacles area in the Gulf of Mexico [Gardner et al]. During that survey, valuable time was spent debugging the installation of the survey equipment. Time was also spent reprocessing data to correct errors discovered later in the survey. With my limited knowledge of multibeam survey systems, I developed a prototype system to visualize the geo-referenced data as it was collected, along with the position and attitude of ship, so I could better understand the problems encountered. It quickly became obvious that such a system could be very useful to multibeam survey operators.On a more recent survey of Portsmouth harbor, in New Hampshire by NOAA, it was observed that determining if the proper coverage was achieved sometimes took as much 24 hours as data from the day's survey was processed at night. Immediate feedback of area effectively covered was not available. It was possible to know which areas for which soundings were available, but without post processing, the quality of the data was not known, and the effective coverage could not be easily determined.To help in identifying possible errors, and help in coverage assessment, a real time gridding system is being developed. The real time grid allows a surface to grow as soundings are added. The system is also capable of displaying the ship's position and attitude. This is useful in finding configuration errors, such as incorrect pitch or roll correction, by matching attitude with artifacts in the soundings and resulting surface.The system can help in coverage assessment not only by determining what areas are covered by pings, but by immediately displaying a surface, low quality pings might be better identified, and areas of interest can also be identified and extra passes can be accomplished right away, if so desired.Various methods of integrating new soundings in the surface may be used. The system can use simple averaging or median filters, or could incorporate more sophisticated algorithms to produce a surface.The following sections will describe the technology developed to enable such a system.TechnologyToday's multibeam sonar collects more data that can be display in a 3d interactive manner. One method of showing a picture of dense hydrographic data is to bin the soundings, then using statistical techniques select a single value to represent that bin. With this collection of representative values, laid out in a regular grid, it is possible to display interactive 3d surfaces of the area covered by those soundings. The following method was developed to allow the data to be assigned to bins, and surfaces to be created in an interactive manner while the data is being collected.RequirementsThe collection of data and real time display of a surface introduces many requirements on a data structure to hold this data. The data structure must allow efficient access to a random bin in which to deposit the incoming geo-referenced data. The data structure must also allow orderly access to the bin values to construct the displayed surface. It is also important, to achieve acceptable rendering speed, to keep the bin values in memory, rather than swap to disk. Another useful feature is to have a structure that can grow without prior knowledge of the bounds of the incoming data. This eliminates the need to establish bounds before data is collected, and allows the flexibility to collect data in areas that might not have previously been defined to be within the bounds of the current survey.DesignA data structure has been designed with those requirements in mind. The structure is based on a quadtree, with a linked list connecting its node into rows and columns. A quadtree is a structure with two indices, one representing the x value of an x,y pair, and the second representing the y value. The top level of a quadtree represents the whole bounds of the tree. The 4 children of that node represent the northeast, southeast, southwest, and northwest quadrants of that node. Each child can have its own set of children down to the level where the nodes represent an area the size of a single bin. This structure allows for a bin to be found in just a few hops through the tree. The depth of the tree is log2n where n is the number of bins in one side of a square containing all the data positions.A quadtree is efficient to access bins in a random order, such as at insertion time, but to get efficient rendering, it is important that the values used for rendering are organized in a method that allows fast sequential access. Drilling down the tree to reach each bin is definitely not the most efficient way of getting to those values. The most efficient method would be to have all the values organized into a two-dimensional array. The problem with 2d arrays is that it must all be allocated at its creation time. This makes it hard for the area to expand, and it also uses memory that might not be needed if the area surveyed is not the exact dimension of the array. The next best solution to allow timely access to sequential bins is to have a link from each bin to its neighbors. This allows the quadtree to grow as needed, without the need for a fully allocated array. This also saves on memory requirements, as memory is only allocated for a bin if a sounding is added to that bin.ImplementationThe design was implemented as a hybrid quadtree/linked list. The quadtree is designed to grow from the leaf nodes, where the bins are located. The quadtree structure is initiated when the first sounding is added. A bin is created to hold the sounding, which becomes the quadtree. As more soundings are added, they either fall into an existing bin, or a new bin must be created. When a new bin needs to be created, it may fall within the bounds of the current quadtree, or outside the bounds of the quadtree. For the case where the new bin is to be created within the bounds of the current quadtree, we start from the top, and we go down the nodes until the leaf level is reached. When we encounter a node where the desired child node does not yet exist, that child is created. In the case of adding a node outside the current bounds of the quadtree, a level is added above the top level, which doubles the dimensions of the quad tree in both the x and y directions, effectively quadrupling the area covered by the quadtree. This is repeated until then new bin would fall within the bounds of the new expanded quadtree. We then add the bin using the same method for adding a bin within the bounds of the quadtree. (Figure 2)Figure 2 - Growing a quadtree as soundings are added. a) The first sounding is inserted,creating the first bin. b) A second sounding is added which falls in the same bin as the firstsounding, therefore it is added to the existing bin. c) A third sounding is added, but falls outsidethe existing bin. The quadtree grows by adding a level above the existing bin. d) A new bin iscreated for the third sounding. e) A fourth sounding is added, which falls within the bounds ofthe quadtree, but not in an existing bin. f) A bin is created for the fourth sounding.Integrated with the quadtree is a linked list. The linked list links each node with its neighbors. As a node is added to the quadtree, links are added to its neighbors, and the neighbors’ links are updated to reflect the added node. The linked list is useful not only for efficient rendering, but also to quickly find the neighbors necessary to calculate the normal vectors necessary for shaded rendering.Accessing the quadtree structure is done using a pointer to the top-level node. Reaching the linked list for a particular line is done using supporting linked lists. The first list determines which resolution we want the list to traverse. The length of this list is equal to the height of the quadtree. This list allows for the rendering to occur at lower resolutions for faster rendering. Each element of this list contains a list of all the lines running from west to east at the particular resolution. Rendering at a given resolution is done by going down the initial list to the desired resolution. The list contained at that level is then traversed, and each line is rendered from west to east.The quadtree/linked list structure was designed to support various methods for binning data. This was accomplished by storing an abstract data type at the leaf nodes. The abstract data type supports methods for adding a data item to the node, and to produce a value that reflects the data collected at that node. This value may be an average, a median or any other value implemented in a derived data type. This allows different data types to be used with different space requirements. If a relatively low amount of soundings is being collected, they may be stored using a data type that keeps all the soundings. In a case where more soundings than available memory are being collected, a data type that can compute a reasonable value without having to keep all the soundings can be used.Future workThe use of a linked list in the rendering of the surface is still a possible source of inefficiencies as the data for the next vertex is not stored contiguously in memory. A pointer must be dereferenced to find each vertex. To solve this problem, an array can be used where all the vertices follow each other in memory. The problems of using an array and the reasons to use a quadtree/linked list hybrid to contain the bins have been discussed. Another possible solution that would reduce some of the wasted space of an array, yet still have some of the benefits of efficient access to subsequent vertices in the rendering process, is to use tiles that are themselves small arrays. These tiles would allow groups of vertices to be contained in the same memory area, which should improve rendering efficiency. The tiles data structure is being implemented, and will be evaluated in comparison with the quadtree/linked list hybrid.The option to drape collected backscatter imagery or side scan imagery over the derived surface is also being considered. Effective means for storing the extra data and rendering the data efficiently will need to be developed. This could be useful in determining the validity of possible targets, thus determining the quality of the incoming data.Another enhancement being considered is adding a diagram of the survey vehicle, along with all its sensors, including transducers, motion sensors, GPS antennas, etc. The equipment would be displayed in their actual position on the vehicle, along with all the measured offsets used to calculate proper sounding positions. This might be helpful in finding errors with offsets used in the systemFigure 3- Over 40 million soundings from a Reson SeaBat 8101 collected by NOAA in Portsmouth, NH. The data has already been hand cleaned by the crew of the NOAA Ship Whiting.ConclusionA real time gridding system has been developed to help give a clear picture in real time of the data being collected, along with existing data. The system also displays the position and attitude of the vehicle collecting the data. The system has been tested by gridding over 40 million soundings in about half an hour in tests where data was fed to the system at higher rates than realtime. (Figure 3) These test were run on off the shelf PC's with added 3D video cards running Linux or Windows NT. The next step is to test the system in real working environments to find deficiencies in the system, and areas of possible enhancements.It must be noted that the system is a work in progress, and that many new features need to be evaluated, and added if deemed beneficial. More work is also needed to better display ship attitude data, and also the relationship between the soundings and the derived surface. (Figure 1) The addition of a surface confidence metric could also be useful.BibliographyGardner, J.V., Sulak, J.K., Dartnell, P., Hellequin, L., Calder, B., and Mayer, L.A., 2000, Cruise Report RV Ocean Surveyer Cruise O-1-00-GM, The bathymetry and acousticbackscater of the Pinnacles area, Northern Gulf of Mexico, US Geological Survey Open-File Rept. 00-350.。