FANUC变量修改
Fanuc机器人零点标定简易步骤

Fanuc机器人零点标定简易步骤
图一1.进入系统目录——变量
图二
2.(找到338行或者401行)MASTER ENB 后面的数字改写成1
3.点开F1。
找到系统零点标定/校准,如下图
图三
4.点一下F3 RES-PCA 用于暂时活动零点丢失的轴组
5.点一下FCTN 找到重新启动设备,冷启动。
6.待设备启动后,哪一个轴组有问题,就单独调至到关节运动,活动下该轴组,调整对准机械外零点刻度标尺位置。
图四
7接着示教器面板右上角调至你要标定的轴组,关节模式。
按照如上的步骤进入系统零点标定/校准这一画面。
8. 例如,G2轴组有问题,我们直接在第一排J1处第三个(SEL ),输入1(修改需要按住动作可能输入1) 然后再按一下F5执行。
7
8
图五
图六9
9.再点一下该图第七项7.跟新零点标定结果。
10.完成上续步骤就是简单标定的了一个G2组。
11.再次进入标定页面,点一下FCTN 找到重新启动设备,对设备进行一次冷启动。
注意!
如果在标定中出现以下黄色提示标签,(见图七)
无法执行零点标定!
由于重力补偿已启用,必须立即
所有需要零点标定的机器人轴
进行零点标定。
此时退出2全轴零点位置标定,选择进入4 简易零点标定(单轴)(见图八)
图七
图八。
FANUC机器人修改设置的内容

FANUC机器人修改设置的内容一、介绍FANUC机器人是一款广泛应用于制造业的自动化设备,其高效、精确和可靠的特点深受广大用户的喜爱。
然而,为了使机器人在实际应用中更好地适应各种不同的工作环境和任务,我们有时需要对机器人的设置进行修改。
本文将详细介绍在FANUC机器人上修改设置的内容以及相关的步骤。
二、修改设置前的准备工作在进行任何设置修改之前,用户应首先确保自己具备足够的机器人知识和相关的安全操作经验。
还应注意以下几点:1、备份原始设置:在修改设置之前,建议先备份机器人的原始设置,以防止误操作导致的问题。
2、了解机器人的工作原理:在进行设置修改之前,建议用户深入了解机器人的工作原理和结构,以避免因不合适的设置导致的潜在问题。
3、遵循操作指南:在进行任何设置修改时,应始终遵循FANUC提供的操作指南和安全规范。
三、修改设置的步骤1、进入设置界面:通过控制面板或远程连接方式进入机器人的设置界面。
2、选择修改项:在设置界面中,根据需要选择要修改的项。
例如,如果需要修改机器人的运动模式,则需要在设置菜单中找到“运动模式”选项。
3、修改设置:选择要修改的设置项后,根据界面的提示进行操作。
例如,在修改运动模式时,可能需要选择新的模式并确认修改。
4、保存设置:完成修改后,务必记得保存所做的更改。
5、验证修改:为了确保修改的设置已生效,建议在安全的环境下进行测试验证。
四、常见设置项及修改建议1、运动模式:根据应用场景的不同,用户可能需要调整机器人的运动模式。
例如,对于需要高精度定位的应用,可以选择“精密模式”以提高定位精度。
2、速度与加速度:为了提高生产效率,用户可能需要增加机器人的移动速度或加速度。
然而,过快的移动速度可能导致机器人出现震动或不稳定现象。
因此,在修改这些设置时,建议先进行速度和加速度的逐步增加,并观察机器人的反应以确保稳定性。
3、传感器设置:对于依赖传感器进行定位或避障的机器人应用,用户可能需要调整传感器的设置。
Fanuc OI TD OI MD 参数更改说明
1更改参数1815
首先在MDI模式下将APC下各轴对应码设为1, 然后再JOG模式下将各轴旋转一段,然后将APZ都改成1,如果不能改,则需关机后重启再改
2 更改参数1002(D1)
从右边起为D0~D7, 将D0和D1位都改成1
各轴可执行回参考点操作
3 更改参数1005(D1)改成1
拷机床参数
1 MDI下, SYSTEM-参数-操作-F输出即可
考入参数
参数--pmc维护--i/o, 进入后选存储卡读取, 移到文件号,操作-列表
然后再选
铣床更改参数
1002
1005
1815
1405 D2 PCL CHANGE TO 1
8133 SSC CHANGGE TO 1
1326 -1 1327 +1
1320 -1 1321 +1
控制器需要备份的数据包括:参数、梯形图、SRAM(包括参数,但电脑打不开)
一备份
1 参数的备份
编辑—系统-参数-选择-文件输出
灌回:编辑--系统—参数—选择—文件输出。
FANUC系统进入系统参数修改的步骤
FANUC系统进入系统参数修改的步骤黑龙江省水利学校张立忠2018年06月19日写在前面有缘的百度朋友们,为着共同爱好的同行们,大家好!这个FANUC系统简单的系统参数修改步骤虽然简单,但是对于很多的初学者,特别是自学的初学者,要是进行熟练的操作也需要费很多周折,因为本人经历过,可能个人比较笨。
为了有同感的朋友们使用方便,特将详细的操作步骤整理出来,供需要者参考使用。
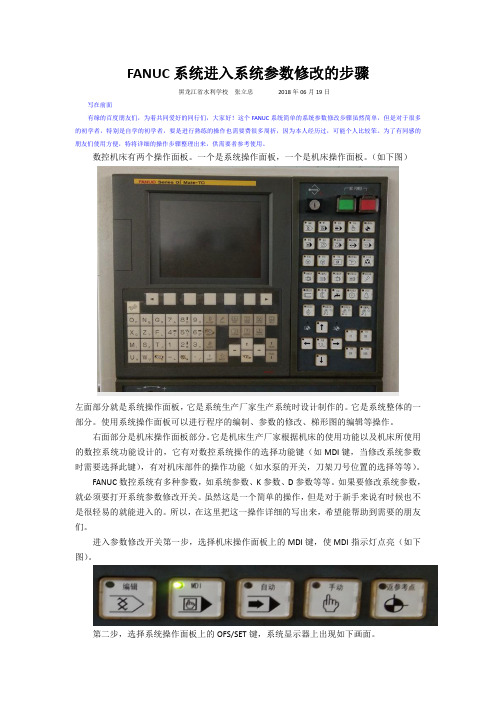
数控机床有两个操作面板。
一个是系统操作面板,一个是机床操作面板。
(如下图)左面部分就是系统操作面板,它是系统生产厂家生产系统时设计制作的。
它是系统整体的一部分。
使用系统操作面板可以进行程序的编制、参数的修改、梯形图的编辑等操作。
右面部分是机床操作面板部分。
它是机床生产厂家根据机床的使用功能以及机床所使用的数控系统功能设计的,它有对数控系统操作的选择功能键(如MDI键,当修改系统参数时需要选择此键),有对机床部件的操作功能(如水泵的开关,刀架刀号位置的选择等等)。
FANUC数控系统有多种参数,如系统参数、K参数、D参数等等。
如果要修改系统参数,就必须要打开系统参数修改开关。
虽然这是一个简单的操作,但是对于新手来说有时候也不是很轻易的就能进入的。
所以,在这里把这一操作详细的写出来,希望能帮助到需要的朋友们。
进入参数修改开关第一步,选择机床操作面板上的MDI键,使MDI指示灯点亮(如下图)。
第二步,选择系统操作面板上的OFS/SET键,系统显示器上出现如下画面。
按右下角箭头软键数次,出现如下画面,如下图。
然后,按[设定]下方正对应的软键,就会出现参数修改开关界面,如下图。
按系统操作面板上的数字键“1”,再按系统造作面板上的INPUT键(如下图),就会出现如下画面(如图),参数写入变成1了,这是修改系统参数的必须条件。
接着在报警选项下会出现100号报警(如下图),经过这些步骤,就可以对FANUC系统的系统参数进行修改了。
FANUC机器人指令手册:编程操作指南
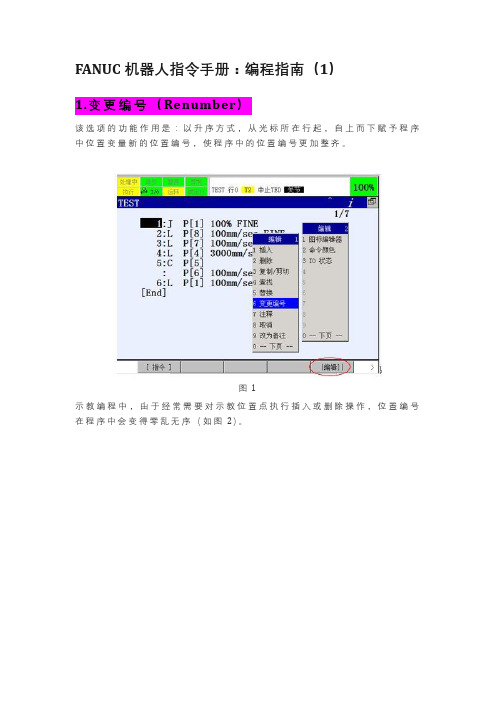
FANUC机器人指令手册:编程指南(1)1.变更编号(Renumber)该选项的功能作用是:以升序方式,从光标所在行起,自上而下赋予程序中位置变量新的位置编号,使程序中的位置编号更加整齐。
图1示教编程中,由于经常需要对示教位置点执行插入或删除操作,位置编号在程序中会变得零乱无序(如图2)。
图2通过变更编号功能,可使位置编号在程序中依序排列(如图3)。
图3注意:1、变更编号功能仅对编号顺序进行调整,不改变原程序轨迹。
2、变更编号功能只对位置变量P[i]有效,对位置寄存器PR[i]无效。
具体操作步骤:将光标移至程序首行后①选择F5编辑命令;②选择“变更编号”选项;③选择F4“是”(如图4、图5所示)。
图4备注:由于行1与行6中位置变量相同,都为P[1]。
所以,变更编号后两者编号保持一致。
图52.取消(Undo)该选项的功能作用是:可以撤销指令的更改、行插入、行删除等程序编辑操作。
注意:该功能只能撤销上一步操作,不能撤销多次操作。
下文以行删除为例对该功能进行说明。
原程序如图6所示:图6在原程序中删除1-3行后,程序如图7所示:图7通过使用取消(Undo)功能,能够撤销删除操作,恢复已删除行。
具体操作步骤:①选择F5编辑命令;②选择“取消”;③选择F4“是”(如图8、图9所示)。
图8图9取消后,程序如图10所示。
图103.改为备注(Remark)该选项的功能作用是:通过将程序中的单行或多行指令改为备注,可以在程序运行中不执行该指令。
原程序如图11,图11该程序对应机器人轨迹如图12,图12将原程序2-4行改为备注后,在行的开头会显示“//”。
改为备注的指令在程序运行中相当于被屏蔽,不会被执行。
将2-4行改为备注后,程序如图13,图13改为备注后的程序执行效果如图14,行2至行4指令内容保留,但不被执行。
图14具体操作步骤:①将光标移至需要改为备注的行号位置;②选择F5编辑命令;③选择“改为备注”选项(如图15);④根据提示,下移光标选中目标对象;⑤选择F4“改为备注”(如图16)。
fanuc机器人有关动作速度倍率的相关系统变量-解释说明
知识专题:探索未知的世界标题:解密fanuc机器人动作速度倍率相关系统变量一、fanuc机器人简介fanuc机器人是世界知名的工业机器人品牌,其在制造业领域有着广泛的应用。
作为自动化生产线的关键组成部分,fanuc机器人的动作速度倍率相关系统变量是其工作效率和精度的重要保障。
二、动作速度倍率的核心含义fanuc机器人的动作速度倍率相关系统变量是指控制机器人动作速度的参数。
人们可以通过修改这些参数来实现对机器人速度的调节,从而适应不同的生产需求。
这些参数包括加速度、减速度和最大速度等,通过合理设置这些参数,可以实现机器人动作的快速、平稳、精准执行。
三、fanuc机器人动作速度倍率相关系统变量的作用1. 提高生产效率通过合理设置动作速度倍率相关系统变量,fanuc机器人可以在不同的生产环境下灵活调整速度,从而实现生产效率的最大化。
在需要加快生产节奏的情况下,可以将速度倍率提高到最大,以快速完成任务;在需要高精度操作的情况下,可以调整速度倍率以降低速度,保证操作的精准性。
2. 保证产品质量fanuc机器人在执行装配、喷涂、焊接等任务时,需要保证产品的高质量。
通过设置动作速度倍率相关系统变量,可以在高速运动和精准操作之间找到平衡点,保证产品质量的同时提高生产效率。
3. 增强设备安全性合理设置动作速度倍率相关系统变量可以避免机器人在高速运动过程中产生过大的惯性力,从而提高设备操作的安全性。
通过减小加速度和减速度,可以降低机器人在运动过程中的冲击力,保护设备和操作人员的安全。
四、我的个人观点和理解在fanuc机器人的应用过程中,动作速度倍率相关系统变量的合理设置是十分重要的。
我认为,在使用fanuc机器人时,操作人员应该根据具体的生产需求,合理设置这些参数,以实现生产效率和产品质量的最佳平衡。
也要注重设备的安全性,避免因速度过快导致的意外损坏。
总结:fanuc机器人动作速度倍率相关系统变量的合理设置,可以有效提高生产效率、保证产品质量并增强设备安全性。
fanuc常用系统变量标准
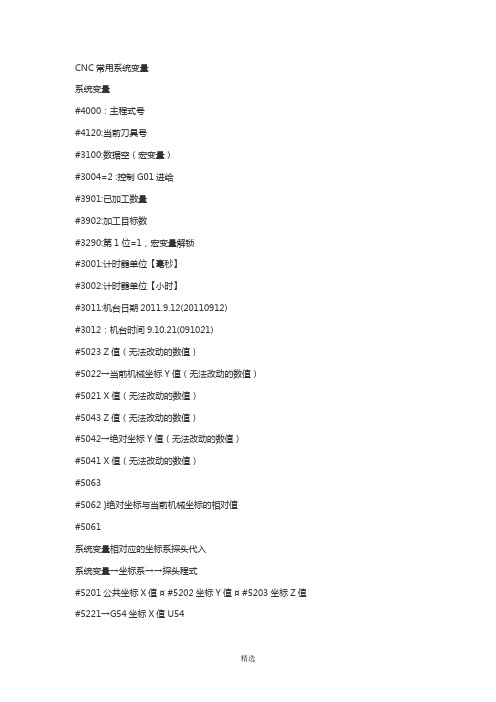
CNC常用系统变量系统变量#4000:主程式号#4120:当前刀具号#3100:数据空(宏变量)#3004=2 :控制G01进给#3901:已加工数量#3902:加工目标数#3290:第1位=1,宏变量解锁#3001:计时器单位【毫秒】#3002:计时器单位【小时】#3011:机台日期2011.9.12(20110912)#3012:机台时间9.10.21(091021)#5023 Z值(无法改动的数值)#5022→当前机械坐标Y值(无法改动的数值)#5021 X值(无法改动的数值)#5043 Z值(无法改动的数值)#5042→绝对坐标Y值(无法改动的数值)#5041 X值(无法改动的数值)#5063#5062 }绝对坐标与当前机械坐标的相对值#5061系统变量相对应的坐标系探头代入系统变量→坐标系→→探头程式#5201公共坐标X值¤ #5202坐标Y值¤ #5203坐标Z值#5221→G54坐标X值 U54#5241→G55坐标X值 U55#5261→G56坐标X值 U56#5281→G57坐标X值 U57#5301→G58坐标X值 U58#5321→G59坐标X值 U59(说明:凡是系统变量坐标系尾数是“1”表示X值,“2”表示Y值,“3”表示Z值。
)#7001→G54.1P1X值 U1001#7021→G54.1P2X值 U1002#7041→G54.1P3X值 U1003#7061→G54.1P4X值 U1004#7081→G54.1P5X值 U1005#7101→G54.1P6X值 U1006#7121→G54.1P7X值 U1007(说明:凡是坐标系尾数是“1”表示X值,“2”表示Y值,“3”表示Z值。
)参数 7851;换刀刀盘旋转速度7810:当前刀具号,(必须与当前刀具号一致)3201:传程式时断开,将从左数2位“0”改成“1”3202:解除“8”“9”字开头的程式保护6031:设定宏变量号保护起始6032:设定宏变量号保护末尾1321:控制机台行程LE: 小于或等于≤【Less then or Equal 】LT: 小于<【Less Then 】GE: 大于或等于≥【Great then or Equal】GT: 大于>【Great Than 】EQ: 等于=【Equal】NE: 不等于≠【Not Equal】WH: 循环【WHILE 】END: 结束IF: 如果GOTO: 跳跃THEN:那么OR: 和AND: 或者ABS: 绝对值G90 G10 L2 P0(公共坐标) X0 Y0 Z0程式里写G90 G10 L2 P0后面带的坐标值会自动输入相应的坐标系里去,例如:G90 G10 L2 P1 (G54)X50 Y10 Z0:程式后面的X50 Y10 Z0,CNC读到这句话后,G54坐标将会是X50 Y10 Z0: G90 G10 L2 P0(公共坐标) X0 Y0 Z0;含义:(P:坐标号 L2 )G90 G10 L2 P2 (G55)X0 Y0 Z0;含义:(P:坐标号 L2 )G90 G10 L2 P2 (G55)X0 Y0 Z0;含义:(P:坐标号 L2 )G90 G10 L2 P3 (G56)X0 Y0 Z0;含义:(P:坐标号 L2 )G90 G10 L2 P4 (G57)X0 Y0 Z0;含义:(P:坐标号 L2 )G90 G10 L2 P5 (G58)X0 Y0 Z0;含义:(P:坐标号 L2 )G90 G10 L2 P6 (G59)X0 Y0 Z0;含义:(P:坐标号 L2 )G90 G10 L20 P1(G54.1P1)X0 Y0 Z0;含义:(P:坐标号 L2 )G90 G10 L20 P2(G54.1P2)X0 Y0 Z0;含义:(P:坐标号 L2 )G90 G10 L20 P3(G54.1P3)X0 Y0 Z0;含义:(P:坐标号 L2 )G90 G10 L20 P4(G54.1P4)X0 Y0 Z0;含义:(P:坐标号 L2 )G90 G10 L20 P5(G54.1P5)X0 Y0 Z0;含义:(P:坐标号 L2 )G90 G10 L20 P6(G54.1P6)X0 Y0 Z0;含义:(P:坐标号 L2 )G90 G10 L20 P7(G54.1P7)X0 Y0 Z0;含义:(P:坐标号 L2 )G90 G10 L20 P8(G54.1P8)X0 Y0 Z0;含义:(P:坐标号 L2 )G90 G10 L10 P1 R95. ;含义:#11001等于95.(P:刀具号 R:数值 L10 )G90 G10 L11 P2 R95. ;含义:#10002等于95.(P:刀具号 R:数值 L11 )G90 G10 L12 P3 R95. ;含义:#13003等于95.(P:刀具号 R:数值 L12 )G90 G10 L13 P4 R95. ;含义:#12004等于95.(P:刀具号 R:数值 L13 )G10 L52; N3202 R01010001 (开参数)G10 L52; N6031 R650 (开参数)G11; (关参数)刀具长度补偿【H】几何补偿#11001,#11002……#11400磨损补偿#10001,#10002……#10400【补偿号1……400】刀具半径补偿【D】几何补偿 #13001,#13002……#13400磨损补偿 #12001,#12002……#12400探针RENISHAW 雷尼绍 & MARPOSS 马波斯的使用方法。
1 FANUC_0i系统参数的修改
2、一台数控机床的轴显示分别为A轴和B轴, 不显示X轴和Z轴,无法有X和Z字母进行编程。
3、一台数控机床,当运行伺服电机正向行走时, 发现伺服电机反向行走,当运行伺服电机反向 行走时,发现伺服电机正向行走。 2022是111时正常,而2022是-111时则会反向。
4、在采用G00快速定位时,发现坐标轴移动速 度非常慢,请问如何排除;
请分别指出下面参数 的类型? 如下参数的类型: 参数0000 0000 1010 参数0012 X 0000 0001 Z 0000 0000 参数0103 11 参数1020 X 88 Y 89 Z 90 参数1320 X 30000 Z 30000
位型 位轴型 字节型
字节轴型
双字轴型
三、FANUC0i系统通用参数
四、通用系统参数的修改
Байду номын сангаас
(一)打开参数写保护开关 (二)根据参数号查找参数 (三)修改参数值
(一)打开参数写保护开关
(一)打开参数写保护开关
(二)根据参数号查找参数
(二)根据参数号查找参数
(三)修改参数值
五、常用参数的作用
1、一台数控机床,按照公制尺寸的图纸加工, 结果加工出的零件尺寸均不符合要求,零件尺 寸不是公制,全部是英制,请问如何解决这个 问题;
1、有关SETTING参数号0000~0023。 2、与各轴的控制和设定单位相关的参数号1001~ 1023。这一类参数主要用于设定各轴的移动单位、各 轴的控制方式、伺服轴的设定、各轴的运动方式等等。 3、与机床坐标系的设定、参考点、原点等相关的参 数号1201~1280。这一类参数主要用于设定机床的 坐标系的设定,原点的偏移、工件坐标系的扩展等等。 4、与存储行程检查相关的参数号:1300~1327。这 一类参数的设定主要是用于各轴保护区域的设定等等。
手把手教你修改FANUC系统参数

手把手教你修改FANUC系统参数学过宏的应该知道,诸如#1,#2,#1420,#3000等变量,#1000以后为系统变量,关于系统变量的设置,可以通过程序设置,(推荐大家看看我写的宏程序自学教程,来学这方面的类容)也可以在机床系统参数界面里面设置,只要你通透理解变量的含义。
今天分享在机床参数界面里面更改数据。
提前声明:修改系统参数,最好拍照记录好修改前的数据,毕竟这些参数是厂家设置好的。
没有弄明白之前,千万不要动。
好了直接上干货,这篇文章14年在网络上分享过,今天在分享一下这篇老文章。
直接看图:第三行选项,输入单位,其实就是0 让你选择公制单位(毫米),1就是英制单位(英寸)在上图的参数写入界面,直接按面板的翻页键,大概翻2页左右,就会出现这个界面,如何修改设备的时间,和日期等等东西,其实就是在这个界面上修改(光标移动到具体数字上修改就行),大家可以试试(上面的内容都是中文,相信大家都能看懂)如果通过程序修改时间,时间变量对应的系统参数是:#3012系统变量。
参数界面的1420#参数,这个参数应该是比较实用的,就是设备各轴的快速移动速度,即GOO在100%倍率下得移动速度。
例如现在图片内XYZ各轴的移动速度就是X轴24米,Y轴24米,Z轴18米,一般线轨的设备打这么快没问题,如果是矩形导轨还是不要开那么快。
这几个参数我曾经改过,因为当时一台加工中心设备的X轴移动时有异响,然后检查发现X轴丝杆轴承需要更换,而日本的NSK轴承仓库没有库存,X轴移动时空跑得负载都在50%多,所以就把参数减半,降低了X轴移动速度,降低X轴轴承的磨损速度,后来轴承买到后又改回来了。
1421#就是设备各轴在0%倍率下的快速移动速度,这个其实一般不需要调整什么。
1422#就是最大切削进给速度(各轴通用的),就是我们F值能设定的最大值。
其实这个值就是一个上限值。
1241#参数,这个参数十分实用,就是机床第二原点设定,一般设备的第二原点就是它的换刀原点,很多设备加工中为提高效率,节省时间,X坐标值和Y坐标值是不设定的(某种特殊情况下要设定,以后会讲到,牵涉到后面的参数,后期再讲),即可在任意位置换刀,但是Z值是一定要设定的,这个位置关系到刀臂卡口和刀具卡紧的位置,图中红色圆圈内的数字-7800就是设备第二原点Z值坐标,该设备换刀时它的Z轴机械坐标一定是与该参数数据相对应的(如下图红色圆圈内所示),大家可以在自己设备换刀的时候,翻看下,了解下。
FANUC机器人修改设置的内容

FANUC修改设置的内容FANUC修改设置的内容:1:系统设置1.1 IP地址设置- 进入设置页面- 在网络设置中修改IP地址- 保存并重新启动系统1.2 语言设置- 进入系统设置页面- 在语言选项中选择所需的语言- 保存并重新启动系统2:运动设置2.1 关节运动范围设置- 进入关节设置页面- 根据的运动范围调整关节限制- 保存并重新启动系统2.2 笛卡尔运动范围设置- 进入姿态设置页面- 根据的工作空间调整姿态限制- 保存并重新启动系统2.3 速度和加速度设置- 进入速度设置页面- 根据需求调整的最大速度和加速度 - 保存并重新启动系统3: IO设置3.1 数字输入设置- 进入IO设置页面- 配置数字输入模块的端口和功能 - 保存并重新启动系统3.2 数字输出设置- 进入IO设置页面- 配置数字输出模块的端口和功能 - 保存并重新启动系统3.3 模拟输入输出设置- 进入IO设置页面- 配置模拟输入输出模块的端口和功能 - 保存并重新启动系统4:安全设置4.1 防护门设置- 进入安全设置页面- 配置防护门的打开和关闭动作- 保存并重新启动系统4.2 安全区域设置- 进入安全设置页面- 根据需要设置安全区域范围- 保存并重新启动系统4.3 急停设置- 进入安全设置页面- 配置急停按钮的功能和位置- 保存并重新启动系统附件:本文档不涉及附件。
法律名词及注释:- IP地址:Internet Protocol Address(互联网协议地址),是分配给网络上设备的唯一地址,用于进行网络通信。
- 关节运动范围:关节的可行动区域,在此范围内可以运动。
- 笛卡尔运动范围:末端执行器的可行动区域,在此范围内可以实现各种姿态。
- IO设置:输入输出设置,用于配置与外部设备的数字或模拟输入输出。
- 急停设置:配置的急停按钮,用于紧急情况下立即停止运动。
FANUC数控宏程序知识详解
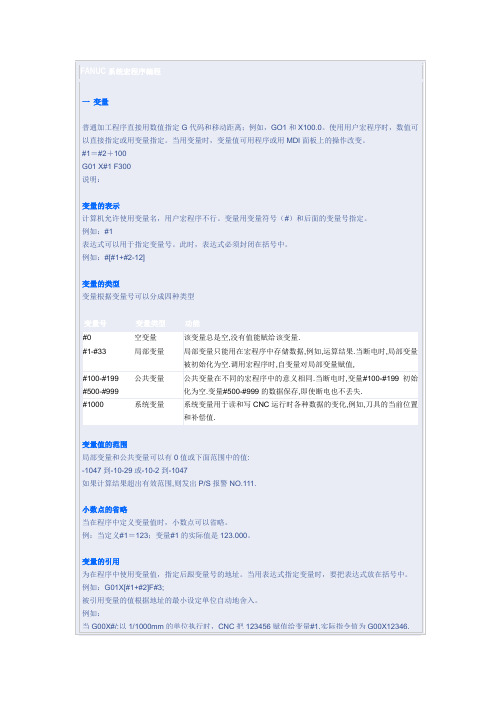
一变量普通加工程序直接用数值指定G代码和移动距离;例如,GO1和X100.0。
使用用户宏程序时,数值可以直接指定或用变量指定。
当用变量时,变量值可用程序或用MDI面板上的操作改变。
#1=#2+100G01 X#1 F300说明:变量的表示计算机允许使用变量名,用户宏程序不行。
变量用变量符号(#)和后面的变量号指定。
例如:#1表达式可以用于指定变量号。
此时,表达式必须封闭在括号中。
例如:#[#1+#2-12]变量的类型变量根据变量号可以分成四种类型#0 空变量该变量总是空,没有值能赋给该变量.#1-#33 局部变量局部变量只能用在宏程序中存储数据,例如,运算结果.当断电时,局部变量被初始化为空.调用宏程序时,自变量对局部变量赋值,#100-#199 #500-#999 公共变量公共变量在不同的宏程序中的意义相同.当断电时,变量#100-#199初始化为空.变量#500-#999的数据保存,即使断电也不丢失.#1000 系统变量系统变量用于读和写CNC运行时各种数据的变化,例如,刀具的当前位置和补偿值.变量值的范围局部变量和公共变量可以有0值或下面范围中的值:-1047到-10-29或-10-2到-1047如果计算结果超出有效范围,则发出P/S报警NO.111.小数点的省略当在程序中定义变量值时,小数点可以省略。
例:当定义#1=123;变量#1的实际值是123.000。
变量的引用为在程序中使用变量值,指定后跟变量号的地址。
当用表达式指定变量时,要把表达式放在括号中。
例如:G01X[#1+#2]F#3;被引用变量的值根据地址的最小设定单位自动地舍入。
例如:当G00X#/;以1/1000mm的单位执行时,CNC把123456赋值给变量#1,实际指令值为G00X12346.改变引用变量的值的符号,要把负号(-)放在#的前面。
例如:G00X-#1当引用未定义的变量时,变量及地址都被忽略。
例如:当变量#1的值是0,并且变量#2的值是空时,G00X#1 Y#2的执行结果为G00X0。
FANUC0I常用参数

FANUC0I常用参数
1.参数5020(铣床程序显示页数):设置铣床程序显示的页数。
2.参数5041(宏变量定义):用于定义宏变量,可以在程序中使用。
3.参数5050(显示设置):设置控制面板的显示方式,例如颜色、
背光等。
4.参数5060(系统消息):控制系统消息的显示方式。
5.参数5102(刀具长度偏移值):设置刀具长度偏移的初始值。
6.参数5200(加工数据记忆区):设置加工数据的存储区域。
7.参数5300(坐标轴速度和进给率单位):设置坐标轴速度和进给
率的单位。
8.参数5400(轴名称显示):设置轴名称的显示方式。
9.参数5900(通用加工参数):设置通用的加工参数,例如进给速度、加工时间等。
10.参数6000(自动工具变更功能):设置自动工具变更的功能。
11.参数6400(切换时间设定):设置工具切换的时间。
这些参数可以通过FANUC0I控制系统的参数编程界面进行设置和修改。
在使用FANUC0I控制系统进行加工时,根据具体的加工需求和机床类型,
对这些参数进行适当的设置和调整可以提高加工的效率和质量。
参数的具
体设置方法可以参考FANUC0I控制系统的用户手册和相关文档。
需要注意的是,FANUC0I控制系统有很多其他的参数可供设置,上述
只是一部分常用的参数。
在实际使用中,还要根据具体的机床和加工需求,灵活调整其他参数以实现更好的加工效果。
发那科系统变量详解

第二节变量普通的加工程序直接数字标注G代码和移动距离,例如G55和X55.0,用定制宏指令时,可以直接用数字或使用变量。
当使用变量号时可通过程序或MDI操作改变变量值,例如:变量的表示:当标注一个变量时在符号(#)的后面标注变量号,例如:#1表达式可以用来当变量号,但表达式必须放在括号里,例如:#[#33-2+#4]。
变量的类型:变量的取值范围:局部变量和公共变量可以取:0、-1047到-10-29和+10-29到+1047范围内的任意值如果计算无结果会P/S警报器报警。
小数点的使用:在程序中给变量进行赋值时,可以省略小数点。
例如:#1=100;意义就是;变量#1的实际值是100.000。
变量的使用:在程序中要使用一个变量值,在地址语句后面标注变量号即可,当用表达式标注变量时表达式要放在括号里,例如:G02 I[#1+#18]F#9;在1/1000mm的增量系统中被使用的变量值的小数点后面第四位会被四舍五入。
例如:#1=500.123678;那么当执行G00X#1时实际的命令会被翻译成G00X500.124;当使用了一个没有定义的变量时,该变量会被忽略。
例如#1=0;#2的是空,那么当运行G00X#1Y#2;时其结果是G00X0;未定义的变量:当没有给变量定义值时,该变量称为“空”变量。
变量#0永远是空变量。
它不能写,但能读。
比如:当使用了一个没有定义的变量时,该变量会被忽略。
除非用<空>代替否则<空>等于0。
当用在条件表达式时:只在EQ和NE时<空>才不等同于0变量不能不使用的情况:程序号、顺序号、选择快的跳跃不能使用变量。
例如:O#2;/#3G00Z300.0;N#9Y1000.0;这种情况都是不可以的使用变量的。
第三节系统变量可以用系统变量读和写CNC内部的数据,如当前的工件坐标系中的位置和刀具偏置数据。
有些系统变量只能读。
系统变量对编写自动化程序和通用程序十分重要。
fanuc各轴速度系统变量
fanuc各轴速度系统变量
Fanuc各轴速度系统变量是用于控制Fanuc机器人各个轴的速
度的参数。
这些变量可以被编程人员修改以调整机器人的运动速度。
以下是一些常用的Fanuc各轴速度系统变量:
1. V:整机速度系数,取值范围为0-100,表示整个机器人运
动速度的百分比。
2. TMAXJ:各个关节的最大运动速度,取值范围为0-100。
3. TMAXP:各个路径的最大运动速度,取值范围为0-100。
4. CMAXJ:各个关节的最大加速度,取值范围为0-100。
5. CMAXP:各个路径的最大加速度,取值范围为0-100。
6. TMAX#:各个轴的最大运动速度,取值范围为0-100。
7. CMAX#:各个轴的最大加速度,取值范围为0-100。
通过修改这些系统变量的值,编程人员可以调整机器人的运动速度,以满足不同的应用要求。
但需要注意的是,在修改这些变量之前,需要确保机器人运动过程中的安全性和准确性。
发那科(FANUC)数控系统使用小贴士54:如何通过修改程序属性来保护程序
发那科(FANUC)数控系统使用小贴士54:如何通过修改程
序属性来保护程序
发那科(FANUC)数控系统使用小贴士54:如何通过修改程序属性来保护程序
我们可以通过将加工程序的属性改为“编辑禁止”来保护加工程序,具体操作方法如下:1、通过“PROG”按键进入到程序列表画面,然后将光标调整到想要修改属性的程序上;2、点击“详细”软键;3、点击右侧扩展键;4、点击“属性改变”软键;5、点击“编辑禁止”软键。
这样程序属性就修改完成了。
这时候再打开程序,程序字体变成了绿色,状态也变成了“只读”状态,不能修改编辑,也无法删除程序。
如果想要恢复可编辑状态,操作方法雷同,就是最后一步,点击“编辑允许”就可以了。
PS:同样的操作方法也可以修改文件夹的属性,借以保护文件夹下的全部程序。
FANUC系统宏程序变量在机械手程序中的应用
东风本田汽车零部件有限公司论文姓名:张智平工号:0942论文题目:FANUC系统宏程序在机械手程序中的应用部门:制造一部设备科发动机保全系曲轴班专业:机电一体化二O一五年十二月随着公司规模日益发展状大,公司对设备自动化生产的需求也越来越强,目前发动机曲轴的设备大部分已完成加装机械手,实现了自动化生产。
从而提高了生产效率,降低了生产成本,为公司今后的发展奠定了基础。
文中主要阐述了FANUC系统宏程序宏变量在机械手编程或与机加设备联机中的灵活应用,使用宏程序后程序量减少、结构简单易改,与机床联机可靠安全。
关键字:自动化机械手 FANUC 宏程序宏变量公司现有设备主要靠人工手动装夹零件,不仅存在很大安全隐患、劳动强度大,还严重影响生产效率,将非自动生产线实现自动化生产迫在眉睫。
现主要采用加装桁架机械手、辅助输料台的方式,将各工序链接,由机械手、机器人搬运零件实现上下料。
桁架机械手根据最快实际运行速度以及加工节拍的情况,一台桁架机械手可以给多台设备服务上下料。
单条生产线一般都生产多个机种零件,因零件尺寸的差异,造成机械手装夹各机种零件的位置也不同,如果要修改某一位置,在程序中查找很困难也易出错;机械手给同工序多台设备服务时,遇到其一台设备故障需屏蔽跳过,或其中一台设备已加工完需优先加工,一般程序编写很复杂难实现;与机床联机信号的交互,PMC若处理不好逻辑关系,容易造成机械手误上下料发生严重的撞机事故。
灵活应用FANUC宏程序编程,使程序编程简单易修改、方便品种切换;轻易实现设备优先加工、屏蔽故障设备;与设备联机运行安全可靠,提高了生产效率。
一.宏程序基本知识1.宏程序的概念宏程序就是相比普通程序可以使用变量进行算术运算,逻辑运算和函数的运算,此外宏程序还提供了循环语名、分支语名和子程序调用语句,利于编制各种复杂的零件加工程序,减少手工进行繁琐的数值计算,以及精减程序量,简化程序。
一般意义上所讲的数控指令其实是指ISO代码指令编程,即每个代码的功能是固定的,由系统生产厂家开发,使用者只需按照规定编程即可。
fanuc机床宏程序助手软件说明
使用帮助手册 版本080418Macrohelper宏程序助手宏程序助手目录欢迎使用宏程序助手 2Macrohelper介绍 3宏程序分析功能 4宏程序流线图编程 6制作FANUC宏程序格式菜单9FANUC程序密码破解13宏变量工具15)宏程序助手)欢迎使用Macrohelper(宏程序助手宏程序助手(Macrohelper)是针对FANUC用户宏程序系统而开发的软件。
你可以使用它来分析FANUC的用户宏程序,利用流线图进行编程或自己开发格式菜单,并且还可以破解FANUC的宏程序保护密码。
关于这本帮助手册在这本手册中,你将会了解到Macrohelper的基础知识。
我将向你显示最重要的屏幕对话框并演示应遵循的步骤,这些内容都有独立的结构,你可以从任意一章开始。
有关鼠标、窗口操作、下拉菜单等的预先经验是有用的,你最好熟悉FANUC系统的基本知识及FANUC宏程序的基本原理。
这本手册是以Macrohelper v0.8为基础来编写的,因此手册所展示的某些功能及窗口可能与你现有的其他版本的Macrohelper有所差别。
有关Macrohelper的其它信息如果你在使用了Macrohelper后,对软件有任何意见或疑问可以致信给软件作者:foxlovervip@。
或登入/macrohelper。
祝你好运!FoxloverMacrohlper介绍主要功能Macrohelper是FANUC宏程序编程的辅助工具,它包括多个功能模块。
你可以在软件的起始画面,对功能进行选择。
软件图标:软件启始画面。
启始画面的菜单选项。
Macrohelper v0.8一共包括四个主要功能:分析宏程序、宏程序流线图编程、FANUC格式菜单制作及破解宏程序密码。
一个辅助工具:宏变量工具。
关于注册Macrohelper基本是一个免费及自由的软件,只有宏程序密码破解功能需要注册后才能开放使用限制。
软件的注册功能会在Macrohelper v1.0中加入,此前版本的软件不具备注册功能。