A55(比较类指令循环指令)
PLC可编程控制器,总结(机电期末测验试题)
第五章 S7-200的功能指令(功能指令的作用及使用方法)一、程序控制类指令 1、系统控制类指令 1) 结束指令结束指令有两条:END 和MEND 。
两条指令在梯形图中以线圈形式编程。
END ,条件结束指令。
使能输入有效时,终止用户主程序。
MEND 无条件结束指令。
无条件终止用户程序的执行,返回主程序的第一条指令。
指令格式:END (无操作数)2) 停止指令STOP ,暂停指令。
使能输入有效时,该指令使主机CPU 的工作方式由RUN 切换到STOP 方式,从而立即终止用户程序的执行。
STOP 指令在梯形图中以线圈形式编程。
指令不含操作数。
指令格式:STOP (无操作数)3)看门狗复位指令WDR ,看门狗复位指令。
当使能输入有效时,执行WDR 指令,每执行一次,看门狗定时器就被复位一次。
用本指令可用以延长扫描周期,从而可以有效避免看门狗超时错误。
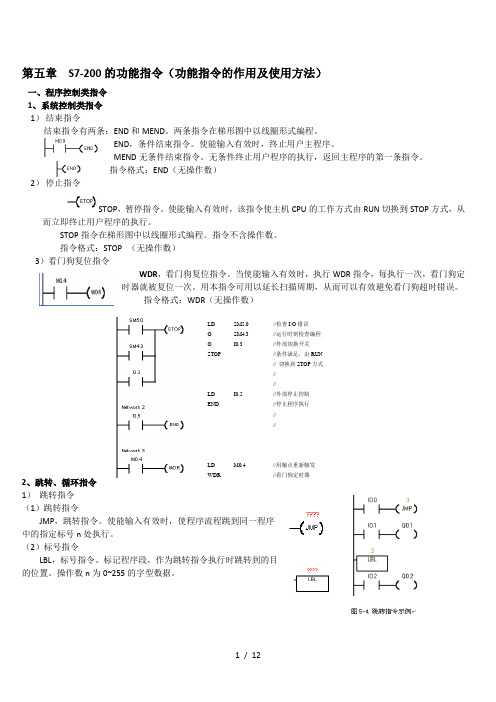
指令格式:WDR (无操作数)2、跳转、循环指令1) 跳转指令 (1)跳转指令JMP ,跳转指令。
使能输入有效时,使程序流程跳到同一程序中的指定标号n 处执行。
(2)标号指令LBL ,标号指令。
标记程序段,作为跳转指令执行时跳转到的目的位置。
操作数n 为0~255的字型数据。
2)循环指令由FOR和NEXT指令构成程序的循环体。
FOR指令标记循环的开始,NEXT指令为循环体的结束指令。
工作原理:使能输入EN有效,循环体开始执行,执行到NEXT指令时返回,每执行一次循环体,当前值计数器INDX增1,达到终止值FINAL时,循环结束。
使能输入无效时,循环体程序不执行。
每次使能输入有效,指令自动将各参数复位。
3、子程序调用指令1)建立子程序(1)从“编辑”菜单,选择插入→子程序;(2)从“指令树”,用鼠标右键单击“程序块”图标,并从弹出菜单选择插入→子程序;(3)从“程序编辑器”窗口,用鼠标右键单击,并从弹出菜单选择插入→子程序。
2)子程序调用(1)子程序调用和返回指令子程序调用SBR子程序条件返回CRET3. 带参数的子程序调用(1)子程序参数(2)局部变量的类型(3)数据类型(4)建立带参数子程序的局部变量表(5)带参数子程序调用指令4、顺序控制指令1. 功能流程图2、顺序控制指令(1)顺序步开始指令(LSCR)(2)顺序步结束指令(SCRE)二、顺序步转移指令(SCRT)二、中断指令概念:中段就是终止当前正在运行的程序,去执行为立即响应的信号而编制的中断服务程序,执行完毕再返回原先终止的程序并继续执行。
DGUS屏指令大全

向液晶发送切换界面命令A5 5A 04 80 03 0000 (0x03图片寄存器,后四位为界面地址,高字节在前,低字节在后)读屏的版本号: A5 5A 03 81 00 01亮度控制A5 5A 03 80 01 20 (0x01寄存器0x00~0x40表示最暗到最亮,共为65级)蜂鸣器声音A5 5A 03 80 02 0A (0x02寄存器0x00~0xff 表示声音长短,共有255级)使能触控A5 5A 03 80 0B 00 (0x0B 寄存器 0x00失能触控,其它使能 )向液晶指定地址写数(u16)A5 5A 05 82 xxxx 0000 uint 向液晶指定地址写数(u32)A5 5A 07 82 xxxx 0000 0000 ulong向液晶写ASCII 码 V1.02A A5 5A 0B 8221.34℃ A5 5A 0C 82 1000 32312E3334A1E600FF 02:54A5 5A 0A 82 1000 30323A3534 00FF改变字体颜色: A5 5A 05 82 2003 FF30 (描述指针+偏移量3) (颜色代码)隐藏汉字或ASCLL :A5 5A 05 82 2008 0002(描述指针+偏移量8)(需显示的字符长度,2个字符为1个汉字) 改变ASCII 码字体大小A5 5A 05 82 200A 3060(描述指针+偏移量A )(X,Y 点阵数,Y=2X ,针对0号字库)画曲线 00通道 A5 5A 16 84调整曲线横轴间隔: A5 5A 05 82 5009 0010 (描述指针+偏移量9)(间隔为10)调整曲线纵轴放大倍数(X/256): A5 5A 05 82 5008 0023(描述指针+偏移量8) (放大倍数为23)调整曲线颜色: A5 5A 05 82 5007 F800 (描述指针+偏移量7)(F800为红色代码)清除曲线数据: A5 5A 03 80 EB 55(0xEB 为清除命令)(0x55清除0~7 8个通道的缓冲数据,0x56~0x5D 对应CH0~CH7)读时间前7位数据 A5 5A 03 81 20 07(0x20为读RTC 寄存器)(前7位数据)收到的7位数据 A5 5A 0A 81 20 07 16 04 05 02 19 22 00 (年月日周时分秒)调整文本颜色 A5 5A 05 82 2003 0030 (描述指针+偏移量3)(颜色代码)↑ GB 码:A1 FC 查表↓ GB 码:A1 FD基本图形:连一条线: A5 5A 13 82 基本图形:连三条线: A5 5A 1B 82 0200 0002 0003 F800显示“总胆红素(TBIL)反应曲线”A5 5A 17 82剪切两个图片粘贴到当前图片的两个位置A5 5A 25 82 0300 0006 0002取消图片拷贝A5 5A 05 82。
LGplc应用指令手册
第五章应用指令5.1 数据传送指令5-15.1.1 MOV, MOVP, DMOV, DMOVP ..................................................... 5-15.1.2 CMOV, CMOVP, DCMOV, DCMOVP .......................................... 5-35.1.3 GMOV, GMOVP .................................................................................. 5-65.1.4 FMOV, FMOVP ................................................................................... 5-85.1.5 BMOV, BMOVP ................................................................................ 5-10 5.2 转换指令5-125.1.1 BCD, BCDP, DBCD, DBCDP ......................................................... 5-125.2.2 BIN, BINP, DBIN, DBINP .............................................................. 5-15 5.3 比拟指令5-185.3.1 CMP, CMPP, DCMP, DCMPP ...................................................... 5-185.3.2 TCMP, TCMPP, DTCMP, DTCMPP .............................................. 5-225.3.3 LD ( =, >, <, >=, <=, <> ) ..................................................... 5-245.3.4 AND ( =, >, <, >=, <=, <>) ................................................... 5-255.3.5 OR ( =, >, <, >=, <=, <>) ...................................................... 5-27 5.4 增加/减少运算5-295.4.1 INC, INCP, DINC, DINCP ............................................................. 5-295.4.2 DEC, DECP, DDEC, DDECP .......................................................... 5-31 5.5 回转指令5-345.5.1 ROL, ROLP, DROL, DROLP .......................................................... 5-345.5.2 ROR, RORP, DROR, DRORP ....................................................... 5-375.5.3 RCL, RCLP, DRCL, DRCLP ............................................................ 5-395.5.4 RCR, RCRP, DRCR, DRCRP .......................................................... 5-425.6 移位指令5-445.6.1 BSFT, BSFTP ...................................................................................... 5-445.6.2 WSFT, WSFTP ................................................................................... 5-465.6.3 SR.......................................................................................................... 5-48 5.7 交换指令5-515.7.1 XCHG, XCHGP, DXCHG, DXCHGP ............................................ 5-51 5.8 BIN 算术指令5-535.8.1 ADD, ADDP, DADD, DADDP ...................................................... 5-535.8.2 SUB, SUBP, DSUB, DSUBP .......................................................... 5-555.8.3 MUL, MULP, DMUL, DMULP ..................................................... 5-575.8.4 MULS, MULSP, DMULS, DMULSP ............................................ 5-605.8.5 DIV, DIVP, DDIV, DDIVP ............................................................... 5-635.8.6 DIVS, DIVSP, DDIVS, DDIVSP .................................................... 5-65 5.9 BCD算术指令5-685.9.1 ADDB, ADDBP, DADDB, DADDBP ........................................... 5-685.9.2 SUBB, SUBBP, DSUBB, DSUBBP ................................................ 5-705.9.3 MULB, MULBP, DMULB, DMULBP ........................................... 5-745.9.4 DIVB, DIVBP, DDIVB, DDIVBP ................................................... 5-76 5.10 逻辑算术指令5-795.10.1 WAND, WANDP, DWAND, DWANDP ..................................... 5-795.10.2 WOR, WORP, DWOR, DWORP ................................................. 5-825.10.3 WXOR, WXORP, DWXOR, DWXORP ....................................... 5-845.10.4 WXNR, WXNRP, DWXNR, DWXNRP ...................................... 5-86 5.11 数据处理指令5-885.11.1 SEG, SEGP ......................................................................................... 5-895.11.2 ASC, ASCP ......................................................................................... 5-925.11.3 BSUM, BSUMP, DBSUM, DBSUMP .......................................... 5-945.11.4 ENCO, ENCOP .................................................................................. 5-975.11.5 DECO, DECOP ................................................................................ 5-1005.11.6 FILR, FILRP, DFILR, DFILRP ....................................................... 5-1025.11.7 FILW, FILWP, DFILW, DFILWP .................................................. 5-1055.11.8 DIS, DISP ......................................................................................... 5-1075.11.9 UNI, UNIP ........................................................................................ 5-1105.11.10 IORF, IORFP .................................................................................... 5-112 5.12 系统指令5-1145.12.1 FALS ................................................................................................... 5-1145.12.2 DUTY ................................................................................................. 5-1155.12.3 WDT, WDTP .................................................................................... 5-1185.12.4 OUTOFF ............................................................................................ 5-1205.12.5 STOP .................................................................................................. 5-121 5.13 跳转指令5-1225.13.1 JMP, JME .......................................................................................... 5-1225.13.2 CALL, CALLP, SBRT, RET ............................................................ 5-124 5.14 循环指令5-1265.14.1 FOR, NEXT ...................................................................................... 5-1275.14.2 BREAK ............................................................................................... 5-128 5.15 标志指令5-1295.15.1 STC, CLC ........................................................................................... 5-1295.15.2 CLE ..................................................................................................... 5-131 5.16 特殊模块指令5-1325.16.1 GET, GETP ........................................................................................ 5-1335.16.2 PUT, PUTP ....................................................................................... 5-135 5.17 数据连接指令5-1375.17.1 READ ................................................................................................. 5-1385.17.2 WRITE ................................................................................................ 5-1415.17.3 RGET .................................................................................................. 5-1435.17.4 RPUT .................................................................................................. 5-1475.17.5 STATUS .............................................................................................. 5-150 5.18 中断指令5-1525.18.1 EI, DI .................................................................................................. 5-1525.18.2 TDINT, IRET ..................................................................................... 5-1535.18.3 INT, IRET .......................................................................................... 5-1555.19 符号反转指令5-1565.19.1 NEG, NEGP, DNEG, DNEGP...................................................... 5-156 5.20 位接触指令5-1595.20.1 BLD, BLDN ....................................................................................... 5-1595.20.2 BAND, BANDN .............................................................................. 5-1605.20.3 BOR, BORN ..................................................................................... 5-1615.20.4 BOUT ................................................................................................. 5-1635.20.5 BSET, BRST ...................................................................................... 5-164 5.21 计算机连接模块指令5-1655.21.1 SND .................................................................................................... 5-1655.21.2 RCV .................................................................................................... 5-166 5.22 高速计数器指令5-1675.22.1 HST ..................................................................................................... 5-1675.22.2 HSC .................................................................................................... 5-170 5.23 RS-485 通讯指令5-1715.23.1 RECV .................................................................................................. 5-1725.23.2 SEND ................................................................................................. 5-1735应用指令5.1.1MOV, MOVP, DMOV, DMOVP1)功能-MOV(P) : 传送在[ S ]中的16位数据至指定的设备[ D ].16 位- DMOV(P) : 传送在指定设备[ S+1, S ]中的32位数据到指定的设备[ D+1, D ].-2) 编程举例在P020检测到一个上升沿,‘h70F3’被传送到P04。
包材指令
欧洲议会和欧洲联盟理事会关于包装物和废弃包装物的94 62 EC指令欧洲议会和欧洲联盟理事会考虑到建立欧洲经济共同体的条约,特别是该条约的第100a条;考虑到欧洲联盟委员会提交的议案;考虑到经济及社会委员会的意见;按照《欧洲共同体条约》第189b条的程序采取行动;鉴于一方面为了防止包装物和废弃包装物对环境造成任何影响,或减小这种影响,从而提供高环境保护水平,另一方面为了确保内部市场的运行,避免在欧洲共同体内部产生贸易壁垒、不正当竞争使和竞争受到限制,应对各国有关包装物和废弃包装物的管理所采取的不同措施予以协调;鉴于防止产生废弃包装物的最佳手段是减少包装物的总量;鉴于就本指令的目标而言,遵守总的原则,即一个成员国为保护环境而采取的措施不应对其他成员国实现本指令的目标的能力产生不良的影响是重要的;鉴于减少废弃物是《欧洲联盟条约》中明确要求的可持续发展的基础;鉴于本指令应该包括投放市场的所有种类的包装物和所有废弃包装物;鉴于因此欧洲联盟理事会1985年6月27日关于人类消费用液体容器的85/339/EEC指令应予以废除;鉴于包装物具有重要的社会和经济功能,因而实施本指令中规定的措施不应损害对包装物或包装商品的质量和运输产生影响的其他相关立法要求;鉴于根据欧洲联盟理事会1990年5月7日关于废弃物政策的决议和欧洲联盟理事会1975年7月15日关于废弃物的75/422/EEC指令中提出的欧洲共同体废弃物管理方针,包装物和废弃包装物的管理首先应该包括防止产生废弃包装物,以及作为附加的基本原则,还应包括包装物的再使用,废弃包装物的再循环及其他回收形式,并由此而减少这类废弃物的最终处理量;鉴于在回收工艺方面的科学和技术取得进步之前,从环境影响上讲,应将再使用和再循环作为首选;鉴于这就要求各成员国建立各种体系保证对用过的包装物和/或废弃包装物进行回收;鉴于应尽快完成寿命周期评定,以便证明对可再使用、再循环和回收的包装物建立一个明确的等级体系是正确的;鉴于应该通过适当措施来防止产生废弃包装物,包括在各成员国内按照本指令的目标采取的行动;鉴于各成员国可根据《欧洲共同体条约》鼓励建立能以环境安全的方式再使用的包装物再使用系统,以利用这些系统对环境保护做出贡献;鉴于从环境角度考虑,再循环应被视为回收的一个重要组成部分,其目的特别在于减少能量和基本原材料的消耗,以及废料的最终处理量;鉴于能量回收是废弃包装物回收的一个有效手段;鉴于各成员国对废弃包装物回收和再循环所确定的目标应该限制在某些范围内,以便考虑各成员国的不同情况,同时避免产生贸易壁垒和不正当竞争;鉴于为了达到中期目标并且为经营者、消费者和公共机构展现必要的长期前景,应该对实现上述目标规定一个中期期限并对最终阶段要确定的目标规定一个长期期限,从而大大提升这些目标;鉴于欧洲议会和欧洲联盟理事会应在欧洲联盟委员会提供的报告基础上对各成员国在努力实现上述目标的工作中获得的实际经验、科研成果和生态平衡这样的评估技术进行考查;鉴于应该允许已经制定了或将要制定超出上述目标范围计划的成员国推行这些目标,以便在这种措施不干扰内部市场和不妨碍其他成员国履行本指令的条件下实现高水平的环境保护;鉴于欧洲联盟委员会应该在进行适当验证之后确认这种措施。
汇编语言指令大全.

字扩展指令 CWD(Convert Word to Double Word)
格式: CWD
功能: 将字扩展为双字长,即把AX寄存器的符号位扩展到DX中.
说明:
1. 两个字或字节相除时,先用本指令形成一个双字长的的被除数.
2. 本指令不影响标志位.
3. 示例: 在B1、B2、B3字节类型变量中,分别存有8们带符号数a、b、c,实现(a*b+c)/a运算。
2. AAA的调整操作
若(AL) and 0FH>9 或 AF=1,则调整如下:
(AL)<--(AL)+6,(AH)<--(AH)+1,AF=1,CF<--AF,(AL)<--(AL) and 0FH
AAD
未组合十进制数除法调整指令 AAD(ASCII Adjust for Division)
格式: AAD
在除法指令前对ax合十进制数进行调整以便能用div指令实现两个未组合的十进制数的除法运算其结果为未组合的十进制数商在al中和余数在ahaad指令是在执行除法div之前使用的以便得到二进制结果存于al然后除以oprd得到的商在al中余数在ah示例
AAA
未组合的十进制加法调整指令 AAA(ASCII Adgust for Addition)
3. 加法指令运算的结果对CF、SF、OF、PF、ZF、AF都会有影响.以上标志也称为结果标志.
4. 该指令对标志位的影响同ADD指令.
ADD
加法指令 ADD(Addition)
格式: ADD OPRD1,OPRD2
功能: 两数相加
说明:
1. OPRD1为任一通用寄存器或存储器操作数,可以是任意一个通用寄存器,而且还可以是任意一个存储器操作数.
西门子 s7-300 s7-400编程语句表(stl)参考手册

美国(约翰森城) 技术支持和授权 当地时间:星 期一到星 期五 08:00:00 - 17:00 电话:+1 (0) 770 740 3505 传真:+1 (0) 770 740 3699 E-Mail:isd-callcenter@sea. GMT: -5:00
亚洲/ 澳大利亚(北京) 技术支持和授权 当 地 时 间:星期一到星期五 8:30 - 17:30 电话:+86 10 64 75 75 75 传真:+86 10 64 74 74 74 E-Mail: @ GMT: +8:00
SIMAT IC 热线和授权服务和技术支持 除了纸文件资料以外,我们在网上还提供有在线资料: /automation/service&support (英文网站) /service (中文网站) 在网上你可以找到: • • • • • 北 大 上 广 成 新闻列表可以向你提供不断更新的最新产品信息。 通过网上服务和技术支持部分的搜索功能,可以找到所需文件。 在论坛部分,全世界的用户和专家都可交流其经验。 通过我们在网上的代表处数据库, 你可以找到当地的自动化与驱动集团代表 处。 有关现场服务、修理、备件等更多信息,可参见“服务”。 京:(010) 6471 9990 连:(0411) 369 9760 - 40 海:(021) 5879 5255 州:(020) 8732 3967 都:(028) 6820 0939
vii
前言
viii
目录
前言…………………………………………………………………………………………………...iii 目录…………………………………………………………………………………………………..ix 1 位逻辑指令…………………………………………………………………………………….1-1 1.1 位逻辑指令概述 ...................................................................................... 1-1 1.2 A “ 与”................................................................................................. 1-3 1.3 AN “ 与非” ........................................................................................... 1-4 1.4 O “ 或”................................................................................................. 1-5 1.5 ON “ 或非”........................................................................................... 1-6 1.6 X “异或” ........................................................................................... 1-7 1.7 XN “ 异或非” ........................................................................................ 1-8 1.8 O 先“ 与” 后“ 或”................................................................................... 1-9 1.9 A( “ 与” 操作嵌套开始.......................................................................... 1-10 1.10 AN( “ 与非” 操作嵌套开始 .................................................................... 1-11 1.11 O( “ 或” 操作嵌套开始 ............................................................................ 1-11 1.12 ON( “ 或非” 操作嵌套开始.................................................................... 1-12 1.13 X( “异或”操作嵌套开始...................................................................... 1-12 1.14 XN( “ 异或非” 操作嵌套开始 ................................................................. 1-13 1.15 ) 嵌套闭合 .......................................................................................... 1-14 1.16 = 赋值 ............................................................................................... 1-15 1.17 R 复位 ............................................................................................... 1-16 1.18 S 置位 ................................................................................................. 1-17 1.19 NOT RLO 取反 ................................................................................. 1-18 1.20 SET RLO 置位(=1 ) ........................................................................ 1-18 1.21 CLR RLO 清零(=0 )....................................................................... 1-19 1.22 SAVE 把 RLO 存入 BR 寄存器........................................................... 1-20 1.23 FN 下降沿 .......................................................................................... 1-21 1.24 FP 上升沿 .......................................................................................... 1-23 比较指令……………………………………………………………………………………….2-1 2.1 比较指令概述..........................................................................................2-1 2.2 ? I 比较两个整数(16 位).....................................................................2-2 2.3 ? D 比较两个双整数(32 位) ...............................................................2-3 2.4 ? R 比较两个浮点数(32 位)................................................................2-4 转换指令………………………………………………………………………………………3-1 3.1 转换指令概述..........................................................................................3-1 3.2 BTI BCD 转成整数(16 位) .................................................................3-2 3.3 ITB 整数(16 位)转成 BCD.................................................................3-3 3.4 BTD BCD 转成整数(32 位)..............................................................3-4
西门子 S7-300 指令列表 说明书
CPU技术数 CPU 312C - 314C-2 DP/PtP
该指令表的订货号为: 6ES7 398-8AA10-8BN0
2001年10月版
A5E00105517-01
西门子公司版权所有©2001。保留所有权利 未经明确的书面授权,禁止复制、传递或使用本手册或其中的内容。 违者必究。保留所有权利包括专利权、实用新型或外观设计专有权。 西门子股份有限公司 自动化与驱动集团 工业自动化系统部 邮政信箱4848,纽伦堡D- 90327
西门子股份有限公司
郑重声明 我们已核对过,本手册的内容与所述硬件和软件相符。但错误在所难 免,不能保证完全的一致。本手册中的内容将定期审查,并在下一版 中进行修正。欢迎提出改进意见。
®Siemens AG 2001 若有改动,恕不另行通知。
6ES7398-8AA10-8BN0
目录
指令表的有效范围 .............................................................................................................................................. 1 地址标识符和参数范围....................................................................................................................................... 1 缩写词和助记符..........................................................................................
配电自动化通信协议扩展技术解读之104规约

104规约归纳整理目录1 总体介绍 (4)1.1 适用范围 (4)1.2 总体规则 (4)2 基本格式 (4)2.1 基本报文格式 (4)2.2 报文格式分类 (5)2.3 不同报文格式的控制域 (5)2.3.1 I格式报文控制域 (5)2.3.2 S格式报文控制域 (6)2.3.3 U格式报文控制域 (6)3 报文实例 (6)3.1 约定 (6)3.2 初始化 (7)3.2.1 初始化流程 (7)3.2.2 初始化结束指令 (7)3.3 总召唤命令 (7)3.3.1 总召唤流程 (7)3.3.2 总召唤指令格式 (7)3.4 时间同步命令 (8)3.4.1 时钟同步流程 (8)3.4.2 时钟同步指令格式 (8)3.5 时间读取命令 (8)3.5.1 时间读取流程 (8)3.5.2 时间读取指令格式 (9)3.6 复位进程命令 (9)3.6.1 复位进程流程 (9)3.6.2 复位进程指令格式 (9)3.7 遥信数据上报 (9)3.7.1 遥信数据上报流程 (9)3.7.2 遥信数据上报指令格式1(SQ=0) (10)3.7.3 遥信数据上报指令格式2(SQ=1) (10)3.8 遥测数据上报 (11)3.8.1 遥测数据上报流程 (11)3.8.2 遥测数据上报指令格式1(SQ=0) (11)3.8.3 遥测数据上报指令格式2(SQ=1) (12)3.9 遥控命令 (12)3.9.1 遥控操作流程 (12)3.9.2 遥控操作指令格式 (13)3.10 故障事件(新增) (13)3.10.1 故障事件上报操作流程 (13)3.10.2 故障事件上报指令格式 (13)3.11 参数设置 (14)3.11.1 参数设置操作流程 (14)3.11.2 参数设置指令格式1(单个) (14)3.11.3 参数设置指令格式2(多个) (14)3.12 参数读取 (15)3.12.1 参数读取操作流程 (15)3.12.2 参数读取指令格式1(单个) (15)3.12.3 参数读取指令格式2(多个) (16)3.13 文件传输 (16)3.13.1 文件传输-召唤目录操作流程 (16)3.13.2 文件传输-传输段操作流程 (16)3.13.3 文件传输-传输节操作流程 (17)3.13.4 文件传输指令格式 (17)1 总体介绍1.1 适用范围规定了配电网自动化主站系统和配电自动化终端之间进行数据传输的帧格式、数据编码及传输规则。
微机原理及接口技术习题答案
微机原理及接⼝技术习题答案第⼀章习题及答案1. 微处理器内部包含哪三⼤部分?解:运算器、控制器和寄存器组。
2. 完成下列数制的转换①解:②0.11B=()D 解:0.11B=0.75D 。
③211.25=( )B =( )H 解:④10111.0101B=( )H=( )BCD解:10111.0101B=17.5H=23.3125D=(0010 0011.0011 0001 0010 0101)BCD3. 已知X=+1011010B ,Y =–0011011B ,设机器数为8位,分别写出X 、Y 的原码、反码和补码。
解:4. 已知X 的真值为32,Y 的真值为–19,求[]?Y X =+补解:[]00001101B X Y +=补5. 已知X=51,Y=–86,⽤补码完成下列运算,并判断是否产⽣溢出(设字长为8位)。
① X +Y ② X -Y ③ –X +Y ④ –X -Y 解:67C C 0⊕=,所以未产⽣溢出。
676. 若使与门的输出端输出⾼电平,则各输⼊端的状态是什么?解:各输⼊端为⾼电平。
7. 若使与⾮门的输出端输出低电平,则各输⼊端的状态是什么?解:各输⼊端为⾼电平。
8. 如果74LS138译码器的Y 4端输出低电平,则C 、B 、A 三个输⼊端的状态分别是什么?解:C 、B 、A 三个输⼊端的状态分别是‘1’,‘0’,‘0’。
第⼆章习题及答案1. 8086/8088CPU 由哪两⼤功能部分所组成?简述它们的主要功能? 解:8086/8088CPU 由EU 和BIU 两⼤功能部分组成。
执⾏单元EU主要完成指令的译码和执⾏。
执⾏单元通过EU控制电路从BIU中取出指令,经过指令译码形成各种定时控制信号,向EU内各功能部件发出相应的控制命令,以完成指令所规定的操作。
总线接⼝单元BIU是8086/8088同外部联系的接⼝。
它负责所有涉及外部总线的操作,包括取指令、读操作数、写操作数、地址转换和总线控制等。
A55使用说明书2.doc
使用之前(重要)警告小部件应存放在儿童和婴儿触及不到的地方。
如果不小心吞食,请立即就医。
警告本装置不具备防水性。
为防止火灾或触电事故,请勿将任何装有液体的窗口安放在本装置附近,或将其暴露于滴水、飞溅、雨或湿气之中。
关于电源适配器注意事项❖从电源插座上拔下电源适配器时,请握紧适配器。
如果您拉拽电源线,可能造成损坏,导致火灾或触电。
❖请将电源适配器保存在婴幼儿接触范围之外。
❖请勿用湿手挺拔电源适配器。
可能造成触电。
❖如果将电源适配器插上电源插座后依然松垮不牢,则请勿使用该插座.否则可能引起发热,导致火灾。
关于设备❖在下列情况下,请不要使用本设备:设备发出异常气味、设备变热、设备的颜色或形状改变、使用期间发生其它异常情况时。
❖不要将本设备置于高温、高湿处,因为这样可能会使设备过热或短路导致损坏。
关于防水请遵循以下与设备的抗水性相关的防护措施:❖不要将本装置放入水中或将水泼溅在本装置上。
❖确保将本装置安置在平稳的表面上。
不要以上端朝下或倾斜的方式使用本装置.❖当本装置已接触到水,请彻底擦干本装置主体上可能已进水的所有缺口.❖接近水时,请不要使用电源适配器。
※即使发生在保修期之内,由于使用不当遭受水损而导致的故障不在产品保修涵盖范围内。
注意一、感谢您选择泊声出品的背景音乐产品,在使用产品之前,请认真阅读本说明书,以了解本机的正确操作方法.阅读完毕后,请妥善保存说明书,以备日后参考。
二、本说明书所涉及的内容改变时,恕不另行通知,以产品实物为准.如有需要,可到泊声网站()查询。
目录2。
1. 产品特点及功能ﻩ错误!未定义书签。
2.2。
主机功能键介绍ﻩ错误!未定义书签。
2.2.1.主机系统功能设置说明ﻩ错误!未定义书签。
2。
3. 纯触摸控制面板使用说明ﻩ错误!未定义书签。
2.3.1.产品特点ﻩ错误!未定义书签。
2。
4.标准控制面板使用说明ﻩ错误!未定义书签。
3.系统安装说明ﻩ错误!未定义书签。
3.1. 喇叭选型及安装............................................................................ 错误!未定义书签。
51单片机汇编指令总结

51单片机汇编指令总结数据传输指令一.片内RAM数据传输指令1.以累加器A为目的操作数的指令:MOV A , RnMOV A , directMOV A , @RiMOV A , #data2.以寄存器Rn为目的操作数的指令:MOV Rn , AMOV Rn ,directMOV Rn ,data3.以直接地址为目的操作数的指令:MOV direct ,AMOV direct ,RnMOV direct1 ,derect2MOV direct ,@RiMOV direct ,#data4.间接地址为目的操作数的指令:MOV @Ri ,AMOV @Ri ,directMOV @Ri ,#data5.十六位数据传送指令:MOV DPTR , #data16二.累加器A与片外RAM数据传送指令:MOVX A ,@RiMOVX A , @DPTRMOVX @Ri ,AMOVX @DPTR ,A三.查表寻址:MOVC A ,@A+DPTR (先PC←(PC)+1,后A←((A)+(DPTR)))+MOVC A ,@A+PC (先PC←(PC)+1,后A←((A)+(PC)))四.交换指令:1.字节交换指令:XCH A ,RnXCH A ,directXCH A ,@Ri2.半字节交换指令:XCHD A ,@Ri3.累加器半字节交换指令:SWAP A五.栈操作指令:1.PUSH(入栈指令)PUSH direct2.POP(出栈指令)POP direct算术运算指令:一.加法减法指令:1.加法指令:ADD A ,RnADD A ,directADD A ,@RiADD A ,#data2.带进位加法指令:ADDC A ,Rn A←(A)+(Rn)+CYADDC A ,direct A←(A)+(direct)+CYADDC A ,@Ri A←(A)+((Ri))+CYADDC A ,#data A←(A)+(data)+CY3.带借位减法指令:SUBB A ,Rn A←(A)-CY-(Rn)SUBB A ,direct A←(A)-CY-(direct)SUBB A ,@Ri A←(A)-CY-((Ri))SUBB A ,#data A←(A)-CY-#data二.乘法除法指令:1.乘法指令:MUL AB BA←(A) ×(B)高字节放在B中,低字节放在A中2.除法指令:DIV AB A←(A) ÷(B)的商,(B) ←(A) ÷(B)的余数三.加1减1指令:1.加1指令:INC A A←(A)+1INC Rn Rn←(Rn)+1INC direct direct←(direct)+1INC @Ri (Ri) ←((Ri))+1INC DPTR DPTR←(DPTR)+12.减1指令:DEC ADEC RnDEC directDEC @Ri四.十进制调制指令:DA A 调整累加器A的内容为BCD码逻辑操作指令:一.逻辑与、或、异或指令:1.逻辑与指令:ANL A ,RnANL A ,directANL A ,@RiANL A ,#data2.逻辑或这令:ORL A ,RnORL A ,directORL A ,@RiORL A ,#dataORL direct ,AORL direct ,#data3.逻辑异或指令:XRL A ,RnXRL A ,directXRL A ,@RiXRL A ,#dataXRL direct ,AXRL direct ,#data二.清零、取反指令:1.累加器A清零指令:CRL A2.累加器A取反指令:CPL A三.循环位移指令:1.累加器A循环左移指令:RL A2.累加器A循环右移指令:RR A3.累加器A连同进位位循环左移指令:RLC A4. 累加器A连同进位位循环右移指令:RRC A控制转移指令:一.无条件转移指令:1.绝对转移指令:AJMP addr11 (先PC+2,然后将addr11的低十位传给PC,PC的高六位不变)2.长转移指令:LJMP addr16 (用addr16的值替换PC的值)3.相对转移(短转移)指令:SJMP rel(带符号的偏移字节数)(PC+2,再加rel赋值给PC)4.间接转移指令:JMP @A+DPTR (A)+(DPTR) →(PC)二.条件转移指令:1.累加器判零转移指令:JZ rel 先PC+2;后判断,A为0时转移,PC+rel赋值给PC;否则顺序执行JNZ rel 先PC+2,后判断,A不为0时转移,PC+rel赋值给PC;否则顺序执行2.比较转移指令:CJNE 目的操作数,源操作数,relCJNE A,direct,rel 先PC+3传回PC,再比较目的操作数和原操作数CJNE A,#data,rel 目>源时,程序转移,PC+rel传回PC且CY=0CJNE Rn,#data,rel 目=源时,程序顺序执行CJNE @Ri,#data,rel 目<源时,程序转移,PC+rel传回PC且CY=13.减一非0指令:DJNZ Rn,rel 先PC\+2,Rn-1,当Rn为0时程序顺序执行,否则PC+rel传回PCDJNZ direct,rel 先PC+3,direct-1,direct为0时程序顺序执行,否则PC+rel 传回PC二.子程序调用、返回指令:1.绝对调用指令ACALL:ACALL addr11 先PC+2,SP+1将PC的低八位存入SP;SP+1,将PC的高八位存入SP。
51单片机教材(免费完整版)

单片机教程原作:进墨者目录单片机教程第一课:单片机概述 (2)单片机教程第二课:单片机的内部、外部结构(一) (2)单片机教程第三课:几个基本概念 (5)单片机教程第四课:第一个小程序 (8)单片机教程第五课:延时程序分析 (10)单片机教程第六课:单片机的内外部结构分析(四) (12)单片机教程第七课:单片机内部结构分析(五) (15)单片机教程第八课(寻址方式与指令系统) (19)单片机教程第九课:数据传递指令 (22)单片机教程第十课数据传递类指令指令 (25)单片机教程第十一课:算术运算类指令 (28)单片机教程第十二课:逻辑运算类指令: (32)单片机教程第十三课:逻辑与指令 (34)单片机教程第十四课:条件转移指令 (38)单片机教程第十五课:位及位操作指令 (41)单片机教程第十六课:计数器与定时器 (44)单片机教程第十七课:定时/计数器的方式控制字 (46)单片机教程第十八课:中断系统 (49)单片机教程第十九课:定时、中断练习一 (52)单片机教程第二十课:定时/计数器实验2 (57)单片机教程第二十一课:串行接口 (60)单片机教程第二十二课:串行口应用编程实例 (65)单片机教程第二十三课:LED数码显示器的连接与编程 (68)单片机教程第二十四课:动态扫描显示接口 (72)单片机教程第二十五课:键盘接口与编程 (78)单片机教程第二十六课:矩阵式键盘接口技术及编程 (83)单片机教程第二十七课:初学单片机几个不易掌握的概念 (87)单片机教程第二十八课:单片机音乐程序的设计与实验 (90)单片机教程第一课:单片机概述1、何谓单片机一台能够工作的计算机要有这样几个部份构成:CPU(进行运算、控制)、RAM(数据存储)、ROM(程序存储)、输入/输出设备(例如:串行口、并行输出口等)。
在个人计算机上这些部份被分成若干块芯片,安装一个称之为主板的印刷线路板上。
而在单片机中,这些部份,全部被做到一块集成电路芯片中了,所以就称为单片(单芯片)机,而且有一些单片机中除了上述部份外,还集成了其它部份如A/D,D/A等。
指令大全

/give [ID] [物品ID] [数量]
给予某个玩家多少个物品
我的世界op怎么改称号:
/nick [称号]
给自己换称号。如果你换成sunly,就会显示你的名字是“~sunly”,但是你的ID还是原来的ID。
我的世界我的世界op怎么刷钱?op怎么改称号?这两个小问题相信大家应该很容易就记住了,下次可以去游戏中试试。
突击(raid) → 如同普通模式,但宠物不会攻击玩家和其他宠物
别名:/pb/petb
颜色代码:
&4
&c
&6
&e
&2
&a
&b
&3
&1
&9
&d
&5
&f
&7
&8
&0
给予自己生存/创造到某个玩家的身边
/tphere [ID]
--------------------------------------------------------------------------------
/petinventory
打开宠物物品栏。
别名:/pi /peti
--------------------------------------------------------------------------------
查看某人最后退出的时间
/weather [storm/sun]
改变天气
/rain off
停雨,这个更简单
51单片机汇编指令集(附记忆方法)
51单片机汇编指令集一、数据传送类指令(7种助记符)MOV(英文为Move):对内部数据寄存器RAM和特殊功能寄存器SFR的数据进行传送;MOVC(Move Code)读取程序存储器数据表格的数据传送;MOVX (Move External RAM) 对外部RAM的数据传送;XCH (Exchange) 字节交换;XCHD (Exchange low-order Digit) 低半字节交换;PUSH (Push onto Stack) 入栈;POP (Pop from Stack) 出栈;二、算术运算类指令(8种助记符)ADD(Addition) 加法;ADDC(Add with Carry) 带进位加法;SUBB(Subtract with Borrow) 带借位减法;DA(Decimal Adjust) 十进制调整;INC(Increment) 加1;DEC(Decrement) 减1;MUL(Multiplication、Multiply) 乘法;DIV(Division、Divide) 除法;三、逻辑运算类指令(10种助记符)ANL(AND Logic) 逻辑与;ORL(OR Logic) 逻辑或;XRL(Exclusive-OR Logic) 逻辑异或;CLR(Clear) 清零;CPL(Complement) 取反;RL(Rotate left) 循环左移;RLC(Rotate Left throught the Carry flag) 带进位循环左移;RR(Rotate Right) 循环右移;RRC (Rotate Right throught the Carry flag) 带进位循环右移;SWAP (Swap) 低4位与高4位交换;四、控制转移类指令(17种助记符)ACALL(Absolute subroutine Call)子程序绝对调用;LCALL(Long subroutine Call)子程序长调用;RET(Return from subroutine)子程序返回;RETI(Return from Interruption)中断返回;SJMP(Short Jump)短转移;AJMP(Absolute Jump)绝对转移;LJMP(Long Jump)长转移;CJNE (Compare Jump if Not Equal)比较不相等则转移;DJNZ (Decrement Jump if Not Zero)减1后不为0则转移;JZ (Jump if Zero)结果为0则转移;JNZ (Jump if Not Zero) 结果不为0则转移;JC (Jump if the Carry flag is set)有进位则转移;JNC (Jump if Not Carry)无进位则转移;JB (Jump if the Bit is set)位为1则转移;JNB (Jump if the Bit is Not set) 位为0则转移;JBC(Jump if the Bit is set and Clear the bit) 位为1则转移,并清除该位;NOP (No Operation) 空操作;五、位操作指令(1种助记符)CLR 位清零;SETB(Set Bit) 位置1。
汇编语言指令速查表
汇编语言指令速查表指令集是计算机中执行指令的一组规范。
在汇编语言中,使用指令来编写具体的程序。
为了方便程序员查找和运用各种指令,制作一份汇编语言指令速查表是非常有必要的。
在本文中,我将提供一份完整的汇编语言指令速查表,帮助读者快速查找和了解汇编语言指令。
以下是一份汇编语言指令速查表,按照指令的功能进行分类。
1. 数据传送指令MOV:将数据从源操作数移动到目标操作数。
XCHG:交换两个操作数的值。
2. 运算指令ADD:将源操作数的值与目标操作数的值相加,并将结果存储到目标操作数中。
SUB:将目标操作数的值减去源操作数的值,并将结果存储到目标操作数中。
MUL:将源操作数的值与目标操作数的值相乘,并将结果存储到目标操作数中。
DIV:将目标操作数的值除以源操作数的值,并将商存储到目标操作数中。
3. 逻辑运算指令AND:对源操作数和目标操作数进行逻辑与运算,并将结果存储到目标操作数中。
OR:对源操作数和目标操作数进行逻辑或运算,并将结果存储到目标操作数中。
XOR:对源操作数和目标操作数进行逻辑异或运算,并将结果存储到目标操作数中。
NOT:对目标操作数进行逻辑非运算,并将结果存储到目标操作数中。
4. 分支指令JMP:无条件跳转到指定的地址。
JZ:如果零标志位为1,则跳转到指定的地址。
JNZ:如果零标志位为0,则跳转到指定的地址。
JE:如果相等标志位为1,则跳转到指定的地址。
JNE:如果相等标志位为0,则跳转到指定的地址。
5. 循环指令LOOP:根据计数器的值,循环执行指定的代码块。
LOPZ:如果零标志位为1,则循环执行指定的代码块。
LOPE:如果相等标志位为1,则循环执行指定的代码块。
6. 存储器访问指令MOV:将数据从寄存器移动到存储器中,或将数据从存储器移动到寄存器中。
PUSH:将数据压入堆栈。
POP:将数据从堆栈中弹出。
7. 程序调用指令CALL:调用指定地址处的子程序。
RET:从调用的子程序返回。
8. I/O指令IN:从外部设备读取数据。
单片机指令表汇总
51单片机指令表汇总51单片机是一种广泛应用的微控制器,其指令集是进行编程的基础。
下面将51单片机的指令表进行汇总,以帮助初学者更好地理解其指令集。
一、数据传输指令1、MOV指令:将源操作数的内容传送到目标操作数。
2、XCH指令:将两个操作数的内容互换。
3、MOVC指令:从外部存储器将数据传送到目标操作数。
4、MOVX指令:将外部存储器中的数据传送到目标操作数。
5、PUSH指令:将数据压入堆栈。
6、POP指令:从堆栈中弹出数据。
二、算术运算指令1、ADD指令:将两个操作数相加,并将结果存放在目标操作数中。
2、SUB指令:从目标操作数中减去源操作数,并将结果存放在目标操作数中。
3、MUL指令:将两个操作数相乘,并将结果存放在目标操作数中。
4、DIV指令:将目标操作数除以源操作数,并将结果存放在目标操作数中。
5、ANL指令:对目标操作数和源操作数进行按位与运算,并将结果存放在目标操作数中。
6、ORL指令:对目标操作数和源操作数进行按位或运算,并将结果存放在目标操作数中。
7、XRL指令:对目标操作数和源操作数进行按位异或运算,并将结果存放在目标操作数中。
8、CPL指令:对目标操作数进行按位取反运算,并将结果存放在目标操作数中。
9、INC指令:将目标操作数加1。
10、DEC指令:将目标操作数减1。
11、ASR指令:将目标操作数右移n位,最高位用符号位补齐。
12、LSR指令:将目标操作数右移n位,最低位用0补齐。
13、ROL指令:将目标操作数循环左移n位,最高位移入最低位。
14、ROR指令:将目标操作数循环右移n位,最低位移入最高位。
单片机汇编指令表一、概述在单片机的世界里,汇编语言扮演着举足轻重的角色。
它是一种低级语言,能够直接与硬件进行交互,提供高效的代码执行效率。
下面,我们将详细列出一些常见的单片机汇编指令,以及它们的功能。
二、指令表1、MOV指令:用于将数据从一个寄存器移动到另一个寄存器。
例如,MOV R1, R2将把 R2的内容移动到 R1中。
arm a55参数

arm a55参数
ARM A55是一种基于ARMv8-A架构的CPU核心,是ARM公司发布的一款中端处理器设计。
它被广泛应用于智能手机、平板电脑、智能家居、工业控制等领域,具有高性能、低功耗、灵活可扩展等优点。
ARM A55采用了全新的微架构和指令集,支持SIMD指令、虚拟化、安全扩展等特性。
相比于之前的A53,A55的指令执行效率提高了18%,能够更好地满足用户对于高性能和低功耗的需求。
同时,A55还支持heterogeneous compute(异构计算),通过与其他计算单元(例如GPU、DSP等)的协同工作,实现更高效的计算和能耗优化。
除了性能提升,A55还具有更好的安全性能。
它支持ARM TrustZone 技术,可以将系统分为安全和非安全两个区域,有效防止恶意软件和黑客攻击。
此外,A55还支持ARM Memory Tagging Extension (MTE)技术,可以在内存中添加额外的元数据,以防止内存越界和缓冲区溢出等安全风险。
A55的设计也注重了低功耗。
它采用了全新的7nm工艺制程,具有更小的能耗和更高的能效比。
同时,A55还采用了ARM DynamIQ技术,可以将不同类型的处理器核心灵活地组合在一起,以实现更好的性能和能耗平衡。
总体来说,ARM A55是一款高性能、低功耗、灵活可扩展的处理器设计,是ARM公司不断创新和进步的体现。
它在各种领域的应用,
为用户带来更加出色的使用体验。
随着技术的不断进步,相信A55的性能和安全性能会不断提升,为用户带来更多惊喜。
51单片机逻辑运算类指令

51单片机逻辑运算类指令
51单片机逻辑运算类指令
对累加器A 的逻辑操作:
CLR A ;将A 中的值清0,单周期单字节指令,与MOV A,#00H 效果相同。
CPL A ;将A 中的值按位取反
RL A ;将A 中的值逻辑左移
RLC A ;将A 中的值加上进位位进行逻辑左移
RR A ;将A 中的值进行逻辑右移
RRC A ;将A 中的值加上进位位进行逻辑右移
SWAP A ;将A 中的值高、低4 位交换。
例:(A)=73H,则执行CPL A,这样进行:
73H 化为二进制为01110011,
逐位取反即为10001100,也就是8CH。
RL A 是将(A)中的值的第7 位送到第0 位,第0 位送1 位,依次类推。
例:A 中的值为68H,执行RL A。
68H 化为二进制为01101000,按上图进行移动。
01101000 化为11010000,即D0H。
RLC A,是将(A)中的值带上进位位(C)进行移位。
例:A 中的值为68H,C 中的值为1,则执行RLC A
1 01101000 后,结果是0 11010001,也就是C 进位位的值变成了0,而(A)则变成了D1H。
RR A 和RRC A 就不多谈了,请大家参考上面两个例子自行练习吧。
SWAP A,是将A 中的值的高、低4 位进行交换。
例:(A)=39H,则执行SWAP A 之后,A 中的值就是93H。
怎么正好是这么。
a55多核启动从核执行的代码

a55多核启动从核执行的代码a55多核启动从核执行的代码随着人工智能、物联网、大数据等应用的快速发展,嵌入式系统的需求也越来越高。
作为嵌入式系统中的关键技术之一,多核处理器的应用已成为一种趋势,而a55多核启动从核执行的代码,更是为此带来了极大的方便,下面将为大家介绍。
一、a55多核的基础架构a55多核是由ARM公司研发的一款芯片,并与专业的嵌入式开发平台结合提供给开发者使用。
作为一款支持多核处理器的芯片,a55多核具备优异的性能和高效的能力,可以支持多个核同时运行,而缺点也很明显,就是编程难度较高。
二、从核执行的代码从核作为多核处理器中的一个重要组成部分,可以看做是一个小型处理器。
在a55多核的应用中,往往需要通过从核进行一些任务的处理,此时需要编写相应的从核执行的代码,而这些代码的编写是一项非常重要的任务。
在编写从核执行的代码时,需要考虑不同从核之间的通信问题、数据同步问题、资源分配问题等,同时也需要注意从核的运行效率。
值得一提的是,a55多核提供了很多标准接口和API函数,可以大大简化从核执行的代码编写。
三、a55多核启动a55多核启动是指从核在启动时的执行流程,涉及到从核进程的创建、启动和结束等问题。
为了最大程度地发挥多核处理器的性能,需要对a55多核的启动进行优化。
在a55多核的启动过程中,需要获得从核的状态信息并进行合理的判断和处理,同时需要为每个从核分配合适的运行资源。
通过对a55多核启动的优化,可以大大提高系统的性能和稳定性。
四、代码示例为了帮助大家更好地理解a55多核启动从核执行的代码,下面给出一个简单的代码示例。
```int main(){// 初始化从核for (int i = 0; i < NR_CORES; ++i) {if (core_is_on(i) && core_started(i)) {init_core(i);}}// 启动从核for (int i = 0; i < NR_CORES; ++i) {if (core_is_on(i) && core_started(i)) { start_core(i);}}// 等待从核结束for (int i = 0; i < NR_CORES; ++i) {if (core_is_on(i) && core_started(i)) { wait_core_finish(i);}}// 释放从核资源for (int i = 0; i < NR_CORES; ++i) {if (core_is_on(i) && core_started(i)) { release_core(i);}}return 0;}```该排版严谨、注释详细,并且利用了a55多核的标准接口和API函数,可以正确地启动从核并等待其完成任务,是a55多核启动从核执行的代码的一个很好的样例。
a55芯片组

a55芯片组A55芯片组是一款由ARM(Advanced RISC Machines)公司设计的处理器架构,它主要用于嵌入式系统和移动设备上的应用。
A55芯片组采用了ARMv8-A架构,是后继版本的ARM Cortex-A53芯片组。
A55芯片组具有低功耗和高性能的特点,主要应用于智能手机、平板电脑、智能电视和可穿戴设备等移动设备中。
它使用了先进的7纳米或10纳米制程技术,使得芯片组可以提供更高的性能和更低的功耗。
A55芯片组采用了动态频率调节(DFR)和大.LITTLE架构。
DFR技术可以根据任务的需求动态调整处理器的频率和电压,以实现最佳的性能和功耗平衡。
大.LITTLE架构则结合了高性能处理器核心和低功耗处理器核心,使得芯片组可以在需要高性能时使用高性能核心,而在需要低功耗时使用低功耗核心。
A55芯片组还具有较高的多任务处理能力和良好的图形处理能力。
它支持多线程操作,并且拥有先进的浮点运算单元和SIMD(单指令多数据流)指令集,可以快速高效地进行图像处理和视频编解码等任务。
在网络连接方面,A55芯片组支持高速的4G和5G网络,可以实现高速的互联网访问和流畅的视频播放。
它还支持Wi-Fi和蓝牙等无线连接技术,可以与其他设备进行无线通信。
此外,A55芯片组还拥有丰富的外设接口,包括USB(通用串行总线)、HDMI(高清多媒体接口)和SD卡等接口,可以连接各种外部设备,如鼠标、键盘、打印机和存储设备等。
总的来说,A55芯片组是一款性能强大、功耗低、多功能的处理器架构。
它在移动设备领域有着广泛的应用,可以提供出色的性能和良好的功耗控制,满足用户的需求。
未来随着技术的发展,A55芯片组将继续不断演进,为移动设备带来更加先进的功能和体验。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
LOOPNZ(LOOPNE)循环控制指令
格式:LOOPNZ 标号(标号是短标号,范围(-128-127)) 执行操作 :CPU执行LOOPNZ 标号时,进行两步操作:
1) (CX)-1CX 2) 判断CX中的值,
(CX!=0且ZF=0(结果不为0)),则继续执行循环体; (CX==0||CX!=0且ZF=1(结果为0))则退出循环体, 顺序往下执行。 注意: 1. 要执行LOOPNZ循环指令,则必须把循环次数预先送入 CX中,LOOPNZ为循环体的最后一个语句
26
程序
MOV AX,2 MOV CX,3 L1: ADD AX,AX
LOOP L1 退出循环的条件是CX=0
MOV AH,4CH INT 21H
27
总结
MOV AX,2 MOV CX,3 L1: ADD AX,AX LOOP L1 MOV AH,4CH INT 21H
CX和LOOP指令相配合实现 循环功能的程序框架如下: MOV CX,循环次数 S:
19
测试单个标志的条件转移指令
1. 测试ZF--零标志 1) JE/JZ指令 JE (相等 时转移) JZ (等于0时转移)
这是当ZF=1时转移到目标地址的条件转移指令 的两种助记符。 这条指令既适用于判断无符号数的相等,又适 用于判断有符号数的相等。
20
测试单个标志的条件转移指令
1. 测试ZF--零标志 2) JNE/JNZ指令 JNE (不相等 时转移) JNZ (不等于0时转移)
条件转移指令会根据比较指令设置的状态标志程 序产生分支。
8
条件转移指令概述
功能: 条件转移指令都是以某些标志位的状态作为依 据:若满足指令所规定的条件,则程序转移;若 条件不满足,就不转移,顺序执行下条指令。
例如:CMP AX,100 JE L1:相等时(ZF=1)转L1标号处
条件转移指令的格式: 操作码 标号(NEAR属性:标号必须在同一个段内)
如果实现段间转移,用JMP或CALL指令来实现
9
条件转移指令概述
标号
所有条件转移指令的目标操作数都是短标号。即 转向的目标地址距转移指令的下一条指令的第一 个字节的相对位移量必须在-128到+127(一 个字节所能表示的)范围之内。若条件满足,则 将这个相对位移量加到指令指针寄存器IP上以实 现其转移。 所有条件转移指令对状态标志均无影响。
当满足OF=0时,转移到目标地址。
23
实例
1. 求出1-10之间的偶数 2. 在BUF为首地址的内在单元中,存放若干个8位
的 无符号数,统计数组中大于0的数的个数,并将结 果存入RESUlT字节单元中.
24
循环控制指令P121
1. LOOP
2. LOOPZ(LOOPE) 3. LOOPNZ(LOOPNE)
31
程序
DATA SEGMENT D1 DB ’ABC_DE’ DATA ENDS
MOV CX,6 MOV SI,-1 MOV AL,20H LEA BX,D1 NEXT: INC SI CMP AL,[SI+BX] LOOPNZ NEXT MOV AH,4CH INT 21H
CX!=0且ZF=0 继续执行循环体
这是当ZF=0时转移到目标地址的条件转移指令 的两种助记符。 这条指令既适用于判断无符号数的相等,又适 用于判断有符号数的相等。
21
测试单个标志的条件转移指令
2. 测试CF--进位标志 JC/JNC指令 1) JC 当满足CF=1时,转移到目标地址。 2) JNC 当满足CF=0时,转移到目标地址。 3. 测试SF--符号标志 JS/JNS指令 1) JS 当满足SF=1时,转移到目标地址。 2) JNS 当满足SF=0时,转移到目标地址。
实例 JMP AX JMP SI JMP [BX] JMP WORD PTR [BP][DI]
39
段间直接转移
无条件转移指令的格式:
JMP FAR-LABEl ; OFFSETIP
标号是一个远标号,该标号在另一个代码段内
40
段间间接转移
无条件转移指令的格式:
JMP MEM32 ; (MEM32)IP ; (MEM32+2) CS
格” 字符,此时ZF=1, 则提前结束循环。 2. 如一直查找到字符 串结束还未找到“ 空 格”字符,此时 CX=0, 结束循环。
33
循环控制指令
1. LOOP
2. LOOPZ(LOOPE) 3. LOOPNZ(LOOPNE)
34
程序
MOV AX,0 JMP L1 ADD AX,1 L1: INC AX
32
DATA SEGMENT D1 DB ’ABC_DE’ DATA ENDS
MOV CX,6 MOV SI,-1 MOV AL,20H LEA BX,D1 NEXT: INC SI CMP AL,[SI+BX] LOOPNZ NEXT MOV AH,4CH INT 21H
程序执行过程,有两 种可能性: 1. 在查找中找到“空
10
条件转移指令P118
判断两个数大小的条件转移指令 测试单个标志的条件转移指令
11
判断两个数大小的条件转移指令
说明: 这类条件转移指令一般和比较指令CMP连用
在CMP 指令之后用测试比较两数后产生的状 态标志决定是否转移。 例如:8位数11111111比00000000大还是小 试两数大小时应特别注意:
SHORT-LABEl是一个短标号,相对位移量DISP的范围是 在-128-+127之间.该标号在本段内使用.
实例 JMP SHORT NEXT AND AL,7FH NEXT : XOR AL,7FH
38
段内间接转移
无条件转移指令的格式:
JMP REG16/MEM16 ; (IP)+DISP(16位)IP
中。
MOV AL,CL
6
CMP(比较指令)P92
格式: CMP OPR1 , OPR2
OPR1是目的操作数; OPR2是源操作数
执行操作: (OPR1-OPR2)
注意:
1.该指令与SUB指令一样执行减法操作,但有一 点
不同,该指令不保存结果(差),即指令执行
后,OPR1和OPR2上操作数的内容不会改变。
42
常用ቤተ መጻሕፍቲ ባይዱ几种系统功能调用
把 PlEASE INPUT NUMBER 字符串输出到显示器上 9号系统功能调用-显示字符串
MOV AH,09h
INT 21h 注意:
1. 把需要输出的串的地址送到DX寄存器。
2. 字符串必须以‘$’为结束符
例题
43
例题
把 PlEASE INPUT NUMBER 字符串输出到显示器上 D1 DB ‘PlEASE INPUT NUMBER $’
25
LOOP 循环控制指令
格式:LOOP 标号(标号是短标号,范围(-128-127)) 执行操作 : CPU执行 LOOP 标号时,进行两步操作:
1)(CX)-1CX 2) 判断CX中的值,不为0则继续执行循环体,若
为0,则退出循环体顺序往下执行。 注意: 1. 要执行LOOP循环指令,则必须把循环次数预先送 入 2. CX中,LOOP为循环体的最后一个语句。
2.执行这条指令的主要目的根据操作的结果设置
状态标志位。
7
比较指令(CMP)说明
目的操作数: 寄存器、存储器 源操作数: 寄存器、存储器、立即数
CMP指令可以对字节或字进行比较; 比较指令不能直接进行存储器与存储器操作数的
比较,这一类比较可以借助于寄存器。 CMP指令后,通常都会紧跟一条条件转移指令,
NEAR-LABEl是一个近标号,相对位移量DISP范
围在 -32768-+32767之间.该标号在本段内使用.
实例 JMP NEXT AND AL,7FH NEXT : XOR AL,7FH
37
段内直接短转移
无条件转移指令的格式: JMP SHORT-LABEl ; (IP)+DISP(8位)IP
循环体 LOOP S
28
LOOPZ(LOOPE)循环控制指令
格式:LOOPZ 标号(标号是短标号,范围(-128-127)) 执行操作 :CPU执行 LOOPZ 标号 时,进行两步操作:
1) (CX)-1CX 2) 判断CX中的值,
(CX!=0且ZF=1(结果为0)),则继续执行循环体; (CX==0||CX!=0且ZF=0(结果不为0))则退出循环体, 顺序往下执行。 注意: 1. 要执行LOOPZ循环指令,则必须把循环次数预先送入 CX中,LOOPZ为循环体的最后一个语句
则转移;(A<B),必有借位,则CF=1; A 等于B,则ZF=1;
15
判断无符号数大小的条件转移指令
JAE/JNB JAE指令 (高于/等于转移) JNB指令 (不低于转移)
JNAE/JB JNAE指令 (不高于等于转移) JB指令 (低于转移)
16
实例
1. 在BUF为首地址的内在单元中,存放两个数 据34,78,求出最大值,存放在RESUlE的内存 单元中.
逻辑运算类指令 AND 逻辑与指令 OR 逻辑或指令 XOR 逻辑异或指令 NOT 逻辑非指令 TEST 测试指令
5
程序
有两个数无符号
数23,45,比较
大小,大数放到
AL寄存器中, 小
数放到Ah寄存 器
MOV BL,23 MOV CL,45 CMP BL,CL JB NEXT XchG BL,CL NEXT: MOV Ah,BL
注意: 段间的间接转移指令的操作数不能是寄存器
41
处理器控制指令
这一类指令可以控制CPU中的状态标志,以及使CPU 暂停,等待等操作. 分为三类