卸船机电气系统计算
卸船机电控解决方案
卸船机电控解决方案一、背景介绍卸船机是港口装卸作业中的重要设备,用于将货物从船舶上卸下。
传统的卸船机通常由机械和电气两部份组成,机械部份负责货物的卸载和运输,而电气部份则控制机械部份的运行。
为了提高卸船机的效率和安全性,需要一个先进的电控系统来实现对卸船机的精确控制。
本文将介绍一种卸船机电控解决方案,旨在提高卸船机的自动化程度和工作效率。
二、解决方案概述本解决方案采用先进的电气控制技术和自动化系统,以实现对卸船机的精确控制和监测。
主要包括以下几个方面:1. 电气控制系统设计根据卸船机的工作特点和需求,设计一个完善的电气控制系统。
该系统包括主控制柜、分控制柜、电气元件、传感器等。
主控制柜负责整个卸船机的控制和监测,分控制柜则负责各个部份的局部控制。
电气元件包括接触器、继电器、变频器等,用于实现对机电和其他设备的控制。
传感器用于监测卸船机的运行状态和环境参数。
2. 自动化系统集成将电气控制系统与自动化系统集成,实现对卸船机的自动化控制。
通过编写合适的控制程序和算法,实现对卸船机的自动启停、速度调节、位置控制等功能。
自动化系统可以根据实时数据和预设参数,自动调整卸船机的工作状态,提高工作效率和安全性。
3. 远程监控与管理通过网络连接,实现对卸船机的远程监控和管理。
可以通过电脑、手机等终端设备,实时查看卸船机的运行状态、故障报警等信息。
远程监控系统还可以对卸船机进行远程诊断和维护,提高设备的可靠性和可用性。
4. 数据分析与优化通过对卸船机运行数据的采集和分析,对其运行状态和工作效率进行评估和优化。
可以根据数据分析结果,调整卸船机的工作参数和策略,提高卸船机的运行效率和能耗管理。
三、解决方案的优势本解决方案相比传统的卸船机电控系统具有以下优势:1. 自动化程度高:通过自动化系统的集成,实现对卸船机的自动化控制,减少人工干预,提高工作效率和安全性。
2. 远程监控与管理:通过远程监控系统,可以实时监测卸船机的运行状态,及时发现和处理故障,提高设备的可靠性和可用性。
基于抓斗卸船机电气系统
基于抓斗卸船机电气系统研究摘要:本文主要论述了抓斗卸船机电气安全保护系统的各种配置,并对它们的特点进行了说明;就它的一些欠缺和容易忽视的情况提出了机构安全保护装置的设置原则,强调了保护装置的有效性问题。
供同行参考借鉴。
关键词:抓斗卸船机;电气保护;安全;前言抓斗卸船机电气安全保护系统应实时有效、长期可靠,并在实践中不断完善,以确保人民生命和国家财产的安全。
近几年,国家按照科学发展观的要求,站在以人为本的角度,将企业安全生产工作提到前所未有的高度,制定了一系列严格的安全生产法律法规。
一、卸船机电气安全保护系统的配置研究1、电气继电保护装置的设置分析中压进线柜:应设电流速断、反时限过电流、零序、欠电压保护,采用具有电压、电流、功率因数、歧变率、均衡度的数字式综合显示器。
中压变压器:应设电流速断、反时限过电流、温度、零序、欠电压、过电压保护,应采用全数字式综合显示保护器。
交流变频电动机:应设短路、过流、热保护、堵转、缺相和单相接地、欠电压保护。
变频调速传动装置:应设过压、欠压、接地、超速、过热、温度、电磁兼容保护。
动力电源电路:应设短路、过压、欠压、隔离、相序保护,并优先采用 tn- c- s 配电方式。
检修电源电路:应设短路、过流、单相接地、漏电保护。
照明电源电路:应设短路、过流、单相接地保护。
控制电源电路:应设短路、过压、欠压、零电压、急断隔离保护。
整机配电系统:应设接地、防雷保护。
2、主要机构安全保护装置分析开闭机构:应设双向预备机械式限位、双向终端机械式限位、双向终端过卷机械式限位、离心式高速端超速装置、离心式低速端超速装置、排绳保护装置、荷重式传感器超载限制器保护、限制过开过闭辅助保护、启动及事故信号装置。
并对控制器和调速器程序软件的上述功能作重复软保护。
起升机构:应设双向预备机械式限位、双向终端机械式限位、双向终端过卷机械式限位、离心式高速端超速装置、离心式低速端超速装置、排绳保护装置、荷重式传感器超载限制器保护、启动及事故信号装置。
连续卸船机电气系统设计
统的故障信息能进入可编程序控制器并通过其 向监 控系统报告。 所有通讯路径上的连接部件均有路径冗
余 , 证当连 续卸船机 某一 连接 部分发 生故 障 时其 以保 余通讯 路径可保 持畅通 。
2 . 主要 机构控 制方案 .2 2
电气传动系统采用交流变频传动系统 ,采用有
运 行 可靠 、拆 装方 便 的脉 冲编码 器 的矢量控 制 或直
通过 变频 器对 链 斗提升 机 、 臂架旋 转 、 给料器 的 速度、 转矩 、 载荷和 位置 实行控 制。
大 车行走传 动系 统为交流变频 调速系 统 , 统速 系 度在 10 围 内可 调 。 0%范 具有过 流、 过压 、 欠压 、 限流及
转 矩限幅等 保护功 能 。 大 车行 走机构具有 以下联锁 限位 : ( 夹轨器 与行走联锁 , 1 ) 正常作业 时 , 夹轨 器未 打 开, 大车不 允许工作 。
控 制系统等组成 。除紧急保 护功 能外 , 所有 控制 与联 锁 功 能都 由可编程 序 控 制器 完成 , 同时 , 可编程 序 控
地面中控系统通讯通 常采用硬线和光纤通讯方式。 电气系统采用全套西门子控制系统,其中 P C系统 L
制器与电气传动系统具有通讯功能, 程序控制器能够
监控 系统提供其 要求 的所有信息 。 整个控 制系 统具有
2 控制系 统 . 2
2 连 续卸 船 机 电气系 统
连续卸船机供 电系统通常为高压上机 ( 高压 经 ,
滑环 、 高压 进线柜 、 线柜和变 压器 向整机 供 电)与 馈 ,
连 续卸 船机 的控 制 系 统 由可 编程 序 控 制 器 、 O U
系统 、 工业控制计算机 、 司机室操作系统及现场操作
卸船机电控解决方案

卸船机电控解决方案一、引言随着全球物流业的快速发展,港口卸船设备的性能和效率对整个物流链的运转至关重要。
电控系统作为卸船设备的中枢神经系统,直接影响到设备的作业效率和稳定性。
本文将围绕卸船机电控解决方案进行深入探讨,旨在提供一套高效、稳定、可靠的电控系统设计方案。
二、系统架构硬件配置:卸船机电控系统主要由工控机、PLC控制器、传感器、执行器等组成。
工控机作为主控单元,负责整体系统控制;PLC控制器实现逻辑控制;传感器负责检测设备状态,如位置、速度等;执行器则根据控制指令执行相应的动作。
软件设计:软件部分包括实时操作系统、控制算法、通讯协议等。
实时操作系统保证系统稳定运行;控制算法对传感器数据进行处理,生成控制指令;通讯协议则确保各模块间数据传输的可靠性和高效性。
三、控制策略速度控制:通过PID算法实现对电机转速的精确控制,保证卸船机在作业过程中的稳定性和效率。
位置控制:采用闭环控制策略,通过编码器反馈实现精确定位,减少设备误差,提高作业精度。
故障诊断与预防:集成故障诊断功能,实时监测设备运行状态,预测潜在故障,降低维修成本。
四、人机界面监控功能:人机界面可实时显示设备运行状态、报警信息等,方便操作人员监控设备状态。
参数设置:通过界面可对系统参数进行设定,满足不同作业需求。
操作便捷:采用友好的人机交互界面,降低操作难度,提高工作效率。
五、能效管理节能控制:根据实际作业需求,自动调整电机转速和功率,降低能耗。
能源监测:实时监测设备能耗数据,为能效管理提供数据支持。
数据分析与优化:通过对历史数据进行分析,优化控制策略,提高能效比。
六、安全防护急停功能:在紧急情况下,可通过急停按钮迅速停止设备运行,保障人员安全。
安全防护:设置多重安全防护机制,防止误操作和意外事故的发生。
冗余设计:关键部位采用冗余设计,提高系统可靠性,确保设备稳定运行。
七、结语本文从系统架构、控制策略、人机界面、能效管理及安全防护等方面对卸船机电控解决方案进行了全面阐述。
船舶电气设备及系统 作业计算题参考答案
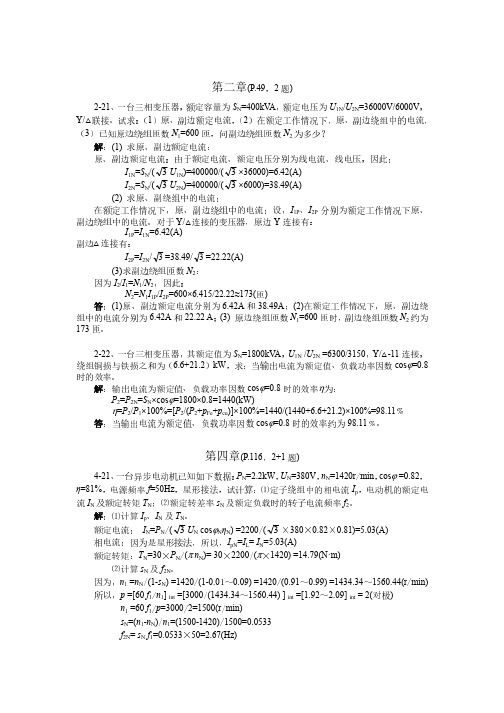
第二章(P.49,2题)2-21、一台三相变压器,额定容量为S N=400kV A,额定电压为U1N/U2N=36000V/6000V,Y/△联接。
试求:(1)原、副边额定电流,(2)在额定工作情况下,原、副边绕组中的电流,(3)已知原边绕组匝数N1=600匝,问副边绕组匝数N2为多少?解:(1) 求原、副边额定电流:原、副边额定电流:由于额定电流、额定电压分别为线电流、线电压,因此:I1N=S N/(3U1N)=400000/(3×36000)=6.42(A)I2N=S N/(3U2N)=400000/(3×6000)=38.49(A)(2) 求原、副绕组中的电流:在额定工作情况下,原、副边绕组中的电流:设,I1P、I2P分别为额定工作情况下原、副边绕组中的电流。
对于Y/△连接的变压器,原边Y连接有:I1P=I1N=6.42(A)副边△连接有:I2P=I2N/3=38.49/3=22.22(A)(3)求副边绕组匝数N2:因为I2/I1=N1/N2,因此:N2=N1I1P/I2P=600×6.415/22.22≈173(匝)答:(1)原、副边额定电流分别为6.42A和38.49A;(2)在额定工作情况下,原、副边绕组中的电流分别为6.42A和22.22 A;(3) 原边绕组匝数N1=600匝时,副边绕组匝数N2约为173匝。
2-22、一台三相变压器,其额定值为S N=1800kV A,U1N /U2N =6300/3150,Y/△-11连接,绕组铜损与铁损之和为(6.6+21.2)kW,求:当输出电流为额定值、负载功率因数cosϕ=0.8时的效率。
解:输出电流为额定值、负载功率因数cosϕ=0.8时的效率η为:P2=P2N=S N×cosϕ=1800×0.8=1440(kW)η=P2/P1×100%=[P2/(P2+p Fe+p cu)]×100%=1440/(1440+6.6+21.2)×100%=98.11﹪答:当输出电流为额定值、负载功率因数cosϕ=0.8时的效率约为98.11﹪。
卸船机电控解决方案
卸船机电控解决方案引言概述:卸船机电控解决方案是指通过电气控制技术来实现卸船机的自动化操作和监控管理。
该解决方案利用先进的电子设备和控制系统,提高卸船机的工作效率和安全性。
本文将从五个大点来详细阐述卸船机电控解决方案的相关内容。
正文内容:1. 卸船机电控解决方案的基本原理1.1 电气控制系统的作用1.2 传感器技术在卸船机中的应用1.3 控制器的功能和特点1.4 通信技术在电控系统中的应用1.5 安全保护装置的设计和实施2. 卸船机电控解决方案的关键技术2.1 电机控制技术2.2 PLC(可编程逻辑控制器)技术2.3 人机界面技术2.4 数据采集和处理技术2.5 远程监控和控制技术3. 卸船机电控解决方案的应用案例3.1 卸船机的自动化控制3.2 卸船机的智能化管理3.3 卸船机的故障诊断和维护3.4 卸船机的能耗监测和优化3.5 卸船机与其他设备的协同作业4. 卸船机电控解决方案的优势和挑战4.1 提高工作效率和减少人力成本4.2 提高卸船机的安全性和可靠性4.3 降低能源消耗和环境污染4.4 技术更新换代的挑战4.5 维护和管理的复杂性5. 卸船机电控解决方案的发展趋势5.1 进一步提升自动化水平5.2 引入人工智能和大数据技术5.3 发展智能化维护和管理系统5.4 推动标准化和规范化建设5.5 加强安全保护和风险管理总结:卸船机电控解决方案通过电气控制技术的应用,实现了卸船机的自动化操作和监控管理。
该解决方案的基本原理包括电气控制系统、传感器技术、控制器、通信技术和安全保护装置。
关键技术主要包括电机控制技术、PLC技术、人机界面技术、数据采集和处理技术以及远程监控和控制技术。
应用案例涵盖了卸船机的自动化控制、智能化管理、故障诊断和维护、能耗监测和优化以及与其他设备的协同作业。
该解决方案的优势包括提高工作效率和安全性,降低能源消耗和环境污染,但也面临技术更新换代和维护管理复杂性的挑战。
未来的发展趋势包括进一步提升自动化水平、引入人工智能和大数据技术、发展智能化维护和管理系统、推动标准化和规范化建设以及加强安全保护和风险管理。
卸船机电控解决方案

卸船机电控解决方案一、引言卸船机是港口装卸设备中的重要组成部份,用于将货物从船舶上卸下。
卸船机的电控系统起着关键作用,能够实现卸船机的自动化操作和精确控制。
本文将介绍一种卸船机电控解决方案,旨在提高卸船机的工作效率和安全性。
二、系统概述该卸船机电控解决方案采用先进的电气控制技术和自动化设备,能够实现对卸船机各个部件的精确控制和协调运行。
主要包括以下几个方面的内容:1. 控制系统设计卸船机电控系统采用PLC(可编程逻辑控制器)作为核心控制设备,通过编写逻辑程序实现对卸船机的自动化控制。
同时,配备人机界面(HMI)系统,方便操作人员进行监控和操作。
2. 传感器和执行器通过安装各种传感器,如位移传感器、压力传感器等,实时监测卸船机各个部件的状态和工作参数。
根据传感器的反馈信号,控制系统可以实时调整卸船机的运行状态。
同时,采用先进的执行器,如变频器、伺服机电等,提高卸船机的运动精度和响应速度。
3. 通信网络卸船机电控解决方案还包括建立稳定可靠的通信网络,实现各个部件之间的数据传输和信息共享。
通过网络,可以实现对卸船机的远程监控和操作,提高工作效率和便利性。
三、功能特点该卸船机电控解决方案具有以下几个功能特点:1. 自动化控制通过编写逻辑程序,实现对卸船机各个部件的自动化控制。
可以根据货物的种类和分量,自动调整卸船机的工作参数,提高装卸效率。
2. 精确定位采用高精度的传感器和执行器,实现对卸船机的精确定位。
可以根据需要,将货物准确地卸放到指定位置,避免损坏货物或者造成安全事故。
3. 故障诊断与报警卸船机电控解决方案配备故障诊断系统,能够实时监测卸船机的工作状态,并及时发出警报。
一旦发现故障或者异常情况,系统会自动停机,并提示操作人员进行检修。
4. 远程监控与操作通过建立通信网络,可以实现对卸船机的远程监控和操作。
操作人员可以通过计算机或者挪移设备,随时随地监控卸船机的工作状态,并进行远程操作和调整。
四、应用案例该卸船机电控解决方案已成功应用于某港口的卸船机改造项目。
电气差动卸船机电气控制系统同步功能的研究
Abs r c :T e p p ri t d c s t e d sg ft e c n r ls se fr a s i n o d r w t h lc r a i ee t l ta t h a e n r u e h e in o h o t y tm o h p u la e i t e e e ti ld f r n i o o h c a
护方便 。
1 常 规 的机 械 差 动 卸 船 机
机械 四卷 筒结 构 是 法 国 C ia al r l d公 司开 发 的技 术 , 结 构形 式为 : 升 电机 、 其 起 闭合 电机 与 小 车行 走 电机 通过 2台特 殊 设 计 的 行 星 减 速器 组 合 装 配 ,
S u fS nc O i a i n O e t i a f, e ta nt o t dy 0 v hr n z tO fEl c rc lDiI r n i lCo r l e
f r B rdg o i e— t pe G r b Sh p Unl a e y a i o d r
( 1个 卷 筒 只 驱 动 1根 钢 丝 绳 , 换 钢 丝 绳 快 6) 更
用来 驱 动 4个 卷 筒 。 同侧 的 2个卷 筒分 别绕 出 2根
钢 丝绳 , 然后 分别 绕 过 桥 架 头 部 和 尾 部 的改 向滑 轮 绕 向抓 斗小 车 , 通 过 抓 斗 小 车 上 的 改 向滑 轮 固定 再
港 口装 卸
21 0 0年 第 1 ( 第 19期 ) 期 总 8
电气 差 动 卸 船 机 电气 控 制 系 统 同步 功 能 的研 究
周 梁 李 光 平 任 世 永 刘 清 1 中 国 华 电 工程 ( 团 ) 限公 司 2 武 汉 理 工 大 学 自动 化 学 院 集 有
卸船机电气室换热系统研究
V oI . 23 NO.1
Ma r 2O1 4
I ) Ol : 1 0 . 3 9 6 9 / j . i s s n . 1 6 7 2 — 6 6 8 5 . 2 0 1 4 . 0 1 . 0 0 3
卸 船 机 电气 室 换 热 系统 研 究
张 涛 , 于祥 春 , 田 秀德
t h e h i g h — p o we r a i r c o n d i t i o n e r a n d p r o v i d e h e a t s o u r c e s .Th i s t e c h n i c a l i n n o v a t i o n a c h i e v e s h e a t —
2 7 5 0 t / h桥 式抓 斗卸 船 机 , 每 年完 成 矿 石装 卸 量 约 占港 口吞 吐量 的 1 / 5 , 刘 日照 港吞 吐量 贡献 率 极 高 , 是 目前 为止 日照港价 值 最高 、 能力 最大 、 自动化程 度 最高 的主力装 卸生 产设 备 。 6台矿 石 卸 船 机 同 时 也 是 日照 港 利 用 率 最 高 卸船 机 电气 室容 积 为 1 2 0 m。 , 配 有 大 型装 机 装 柜 型西 门 子变 频驱 动 柜 , 卸 船 机作 业 时 变频 器 等 电
t e c h n i c a l b o t t l e n e c k t h a t r e s t r i c t s t h e d e v e l o p me n t o f c i r c u l a r e c o n o my,a n d i t c a n h e l p t o r e d u c e
1 0匹 、 2台 5匹) , 不间 断地进 行强 制 制冷 散热 。 如何 将 电气 室 电气 元件 散热 的热 风在 不用 大功
卸船机教学模型电气控制程序设计

关键词:港口;电气设备;卸船机;PLC;教学模型一、控制系统硬件部分为贴合卸船机本身电控系统结构,模型采用与卸船机电控系统相同的主控PLC型号及配套输入输出模块、通信功能。
使用ABB公司AC800M系列主控PLC,利用以太网端口进行编程操作。
通过Profibus通信方式实现与各分站模块CI801以及输入输出模块DI801、DO802等功能硬件的通信功能。
动力部分采用24VDC电机,配合直流调速器进行机构驱动功能。
并采用干簧管开关、接近开关、微动开关等各类限位开关实现保护和位置检测功能。
二、主要机构功能卸船机控制分为起升、开闭、小车、大车等机构运行控制。
手动指令由左右机构操作手柄发出,驱动不同电机进行机构动作。
控制程序首要解决的问题是驱动电机的同时判断机构运行的位置和状态。
由于驱动电机尺寸和成本考虑,结合模型机构运动所需的控制精度,控制程序采用计时器加限位来实现机构状态的判断功能。
即对关键位置设置限位进行状态修正,其他情况通过电机速度和运行时间来计算设备状态。
以抓斗高度S为例:S=k1*(t1-t3)+k2*(t2-t4)+bt1=上升速度1运行时间t2=上升速度2运行时间。
t3=下降速度1运行时间t4=下降速度2运行时间。
k1、k2、b为调整合适的比例值及常数。
其他机构计算方式与上述计算方式相同或更为简单(只有一种速度):对于抓斗的限位设置,主要使用干簧管开关配合抓斗上安装的磁铁,进行关键位置的状态重置,如抓斗起始位,船舱上方,抓斗前极限。
同时结合抓斗起升、开闭电机的运行时间,对抓斗起升上限、起升下限、开斗极限、闭斗极限等抓斗极限状态进行限制,防止出现抓斗绳过松或者抓斗冲顶、触底事故。
对于大车的限位设置,主要是轨道两侧极限位置的接近开关,通过检测大车两侧行走轮进行安全限制,防止设备出轨。
同时结合大车走行电机的运行时间,对大车位置进行计算,根据仓口位置,选择合适的大车停车、作业位置。
其他的辅助机构,如司机室走行、接料板起放等,均使用微动开关进行安全保护和位置确认。
桥式抓斗卸船机机器电气房设计
桥式抓斗卸船机机器电气房设计张金贵上海振华重工(集团)股份有限公司㊀㊀摘㊀要:为优化桥式抓斗卸船机机器电气房设计,从机器电气房的功能结构㊁热量计算㊁结构计算㊁底盘结构等方面,提出底盘结构设计要点和整体空间布置形式,可为类似产品的优化设计提供参考㊂㊀㊀关键词:机器电气房;桥式抓斗卸船机;设计Design of Machine Electrical Room for Bridge Grab Ship UnloaderZhang JinguiShanghai Zhenhua Heavy Industries Co.,Ltd.㊀㊀Abstract :To optimizing the design of machine electrical room of bridge grab ship unloader,considering the func-tional structure,heat calculation,structural calculation and chassis structure of machine electrical room,the design points and overall spatial layout of chassis structure are put forward,which can provide reference for the optimal design of similar products.㊀㊀Key words :machine electrical room;bridge grab ship unloader;design1㊀引言随着大型散货专用船舶的持续发展,大吨位卸船机发展迅速㊂随着机型高度变高,内部机构和电气柜尺寸变大,位于卸船机陆侧门腿结构顶部的电气房也越来越大,其迎风面积增大,结构重量增加,使得整机轮压增加,提高了码头基建和设备制造成本,并且降低了卸船机的安全使用系数㊂为此,有必要对机器电气房进行分析探讨㊂2㊀功能结构机器电气房作为一个整体部件安装在后大梁上方的陆侧肩梁上,主要由底盘㊁围棚㊁屋顶㊁门窗㊁通风扇㊁出绳罩等结构零部件组成㊂对外界半封闭隔断,满足隔热㊁防风㊁防雨㊁防火㊁防尘㊁抗腐蚀㊁抗台风等基本要求㊂屋顶设计坡度不小于1ʒ10,四周设置漏水槽,让雨水能及时排出㊂屋顶和侧面墙壁结构一般采用H 型钢做骨架,外表面采用厚度不小于1.4mm 的镀锌波形板或者3mm 的不锈钢平板做蒙皮,内层采用0.6~0.8mm 的彩钢扣板或铝板嵌压覆盖,中间层采用薄壁矩形管或者角钢做檩条,隔热保温填充物一般是泡沫塑料㊁玻璃棉或岩棉等,厚度在50~100mm㊂聚苯乙烯泡沫塑料(EPS)价格较低,安装方便但阻燃性较差,燃烧时会释放有毒烟雾㊂酚醛泡沫塑料的阻燃性优于EPS,但不及玻璃棉,价格较高㊂泡沫塑料隔热较好,但是吸音效果相对不佳㊂玻璃棉和岩棉是无机纤维类产品,价格适中,吸音效果好防火性能佳,是目前比较成熟可靠的吸音隔热材料㊂如果对噪声要求特别高,还可以采用穿孔板加吸音材料的组合办法来解决㊂通常机器房内噪声要求ɤ105dB(A),电气房内噪声要求ɤ75dB(A)㊂机器房内噪声源主要是起升开闭小车运行机构和俯仰机构的电机频繁正反转切换,高低速制动器频繁制动,以及减速箱和支承轴承等其他机械振动摩擦等㊂由于这些噪声源来自于卸船机的主要工作机构,降低其本身噪声的工作难度很大,所以应从加强机器房的隔音入手㊂3㊀热量计算机器房的热源分内外两个方面,外部主要是环境温度和太阳的热辐射,内部主要是减速箱油温散热㊁电机散热㊁轴承和机械部件的摩擦散热等㊂技术规格书通常要求机器房内的夏季作业室温要小于40ħ,房内保持微正压,散热降温的通风换气次数不小于30次/h㊂鉴于卸船机是处理散料的设备,工作环境粉尘多,机器房是一个半密闭的防尘空间,无法自然通风,所以一般都会采取机械强制通风的方42Port Operation㊀2022.No.2(Serial No.263)博看网 . All Rights Reserved.案㊂采用带有空气过滤器的进风扇和排风扇,进风扇的空气过滤器用无纺布材料制作,排风扇出风口采用不锈钢网作防鸟用途,通风扇尽量均布,通风扇罩壳下方净空高不小于2m㊂通风扇排气总量为:Q=qn(1)式中,q为单个通风扇排气量,m3/h;n为通风扇数量;换气次数为:M=Q/V(2)式中,V为机器房内部空间体积,m3㊂根据计算结果选择风扇型号与数量㊂电气房通常是内嵌在机器房内的一个相对密闭房间,电气房的四壁和顶部采用隔热㊁隔音㊁阻燃材料㊂室内安装冷热兼用的工业空调,以确保制冷后室内的温度不高于25ħ,制热后室内的温度不低于18ħ,且专门配备除湿机㊂电气房内的布局一般采用的是PLC室与控制柜室分开的模式,PLC室有CMS控制柜;控制柜室内有大车行走㊁俯仰机构㊁起升开闭小车运行机构的变频控制柜㊁低压控制柜㊁低压配电柜㊁照明控制柜等㊂高压开关控制柜和主副变压器布置在电气房外的机房内㊂电气房需要计算热量转换作为依据选择空调的功率参数㊂墙壁及屋顶的基本传热量为:Q j1=KF(t w-t n)a(3)式中,K为传热系数,W/m2ħ,取K=5.68/R;R为热阻值(英制),当隔热材料厚度为50mm时,R=7. 4;F为墙壁及屋顶的散热面积,m2;a为温差修正系数;t n为室内计算温度;t w为室外计算温度㊂地板夹层的基本传热量为:Q j2=KF(t w-t n)a(4)式中,K为地板夹层的传热系数,W/m2ħ;F为地板夹层的散热面积,m2㊂玻璃窗的基本传热量为:Q j3=KF(t w-t n)a(5)式中,K为玻璃窗的传热系数,W/m2ħ;F为玻璃窗的散热面积,m2㊂附加吸热量为:Q f=Q j(b f-b li)a(6)式中,b f为风力修正系数;b li为墙壁修正系数;电气房的基本传热量Q j=Q j1+Q j2+Q j3;电气房内电气设备的发热量Q2;电气室的总吸热量Q=Q j+Q f+Q2;根据总吸热量选择空调的制冷功率㊂4㊀结构计算机器电气房的骨架一般采用门式钢架结构,H 型钢架立柱与机器房底盘结构焊接在一起,底盘结构就是整个机器电气房的基础部分㊂门式钢架通常用于跨度9~36m㊁柱距6m㊁柱高4.5~9m的机器房,屋面坡度宜取1/8~1/20㊂钢架横梁连接钢架立柱组成门式钢架,此种结构的稳定性㊁空间结构比较好,钢材用量少,制造简单,安装方便㊂门式钢架结构设计主要计算永久荷载㊁可变荷载与偶然荷载的荷载组合㊂永久荷载包括外包压型板与保温层及覆盖扣板㊁檩条㊁墙架㊁钢架立柱㊁钢架横梁㊁维修行车轨道梁等部件的自重㊂可变荷载包括维修行车荷载㊁风荷载㊁雪荷载㊁屋面均布活荷载等㊂偶然荷载包括地震荷载和其他意外事故产生的荷载㊂在这些荷载中地震荷载一般对于地震多发震区才予以考虑,积雪荷载按FEM规范可以不予考虑,除非在特定地区用户有此要求[1],屋面均布荷载一般取0.5kPa㊂根据机器电气房的结构特性,钢结构计算通常只考虑强度和挠度计算,疲劳计算不予考虑㊂中级工作制桥式吊车受弯构件容许挠度不大于L/1000,其中L为受弯构件的跨度㊂钢架立柱顶部位移不大于H/400,其中H为钢架立柱高度㊂下面重点研究门式钢架的垂直风荷载计算㊂风力作用分为工作状态风和非工作状态风,假定风可以从任何方向以常速水平吹来,风载荷对机器房结构的作用是静态的㊂风的动压为:q=0.613Vs2(7)式中,Vs为设计风速,m/s㊂卸船机的工作状态风一般为20m/s,非工作状态风一般为55m/s,个别地区为75m/s㊂卸船机机器房的结构风载荷为:F=AqC f(8)式中,A为结构的有效迎风面积,m2;q为设计工况对应的风压,MPa;C f为结构部分沿着风向的风力系数,通常机器房的壳结构风力系数为1.10㊂钢架结构简图见图1,计算其仅受单侧风均布载荷下的内力[2]㊂图1 钢架结构形式简图52港口装卸㊀2022年第2期(总第263期)博看网 . All Rights Reserved.刚架柱与刚架横梁的线性刚度系数k 为:k =I b /I C h /s (9)式中,I b 为刚架横梁的平均截面惯性矩,cm 4;I C 为刚架柱的平均截面惯性矩,mm 4;h 为刚架柱高度,m;s 为刚架横梁的长度,m㊂综合系数N 为:N =(kh +f )2+4k (h 2+hf +f 2)(10)式中,f 为刚架横梁坡高度,m㊂竖直支座反力为:V =-V A =V E =wh 2/2lk /(3k +1)(11)式中,V 为支座反力,kN;w 为均布水平风载荷,kPa㊂依据以上载荷分别计算A 点㊁E 点的水平支座反力和弯矩,B ㊁C ㊁D 点的弯矩㊂其他双坡门式刚接钢架受力情况简图和计算公式参见‘轻型钢结构设计指南“㊂采用塑性分析法确定内力时,对受弯构件的强度计算㊁稳定性计算按GB50017-2003‘钢结构设计规范“进行[3]㊂钢架结构载荷内力简图见图2㊂图2㊀载荷及内力简图对维修行车的轨道梁㊁屋顶檩条㊁侧面墙架等可以按照受弯构件来计算,传统的计算公式较繁琐,可采用有限元计算更为简便㊂5㊀底盘结构设计采用差动减速箱的卸船机通常拥有两大传动机构,分别是起升开闭小车运行机构和俯仰机构㊂底盘一般会设计成密闭的箱体结构,在满足结构强度和刚度的前提下还要考虑箱体内部电缆托架的布置和电缆的走向㊂俯仰机构和起升开闭运行机构的运行作用力最终会通过机构底座传递至底盘结构上,机构底座的对筋十分重要,鉴于局部区域筋板密集度较高㊁空间狭小,要考虑焊接空间问题,设计时要分析哪些部位采用短筋和长筋,哪些部位需要形成箱体结构,尤其需要采用合理的焊接顺序来规避应力集中的问题,必要时在施工图纸的技术要求中清晰注明㊂底盘上表面板尽可能的多设置电缆槽盖便于穿线,尽量不布置电缆走线槽,使表面平整以免影响工作人员行走㊂液压管路和润滑管路集中布置,在设计布局时要考虑留有足够的检修空间㊂底盘结构一般会设置一大一小2个吊装孔,大吊装孔的开孔尺寸要满足最大检修件的吊装,机器房中整体最大件通常是减速箱和卷筒,开孔位置应考虑维修件从机器房到码头面的起吊过程中避免与钢结构发生干涉的情况;小吊装孔布置在两大机构的中间,主要作用是更换安装在运行小车上的改向滑轮㊂底盘的整体布局见图3㊂电气房位于底盘的陆侧方向,电气房底盘高于机器房底盘上表面600~900mm,两大运行机构布置在底盘的中轴线上,电梯井布置在底盘一侧靠近边墙位置,另一侧靠近边墙位置布置主㊁副变压器,高压开关柜,采用护网栏杆封闭,以免发生危险㊂如果开关柜布置位置太靠近门口,此处应设置挡雨墙㊂1.PLC 房㊀2.润滑泵站㊀3.起升开闭机构㊀4.电气房㊀5.排风扇㊀6.大吊装孔㊀7.主变压器㊀8.挡雨墙㊀9.进风扇㊀10.俯仰机构㊀11.小吊装孔㊀12.液压泵站㊀13.电梯㊀14.防护栏㊀15.副变压器㊀16.高压开关柜图3㊀机器房布置图6㊀其他设计要点机器房内部上方安装起升重量为10t 或12.5t 的桥架式维修行车一部,行车轨道安装在两侧结构立柱的轨道梁上,在电气房顶部或者电梯井顶部留有通往维修行车的维护通道㊂在海侧墙壁或陆侧开孔处安装防跳绳托辊组或者高分子抗磨块,在墙壁开孔处外侧设防雨防尘罩㊂机器房内部设置钳作台㊁备品柜及系列维修工具,铝合金人字梯等㊂在北方极冷地区可以采用2层密闭门的形式,更好地阻止冷空气进入电气房内㊂机器房屋顶设置一圈维护62Port Operation㊀2022.No.2(Serial No.263)博看网 . All Rights Reserved.栏杆,卸船机的使用寿命一般为25~30年,外包波形板尤其是房顶每10年左右重新油漆维护一次,以免锈蚀漏雨㊂电气房内部需要配置工业吸尘器,经常除尘以便减少灰尘对电气元件的影响㊂电气房内部要配置烟雾感应器,或自动感应灭火系统㊂在机器房和电气房的便利处布置手提式或者小车式灭火装置㊂电气房地板采用防火板,上面覆盖厚度4~6mm 绝缘等级10kV 以上的橡胶绝缘地毯㊂在电气房的墙壁上根据情况设置玻璃窗以便观察机器房内部机构的运行情况㊂电气房内部留有足够的行走空间和电气柜开门空间㊂吸顶空调或者壁挂空调要设置冷凝水接水盘,通过管路导引到电气房外部㊂7㊀结语目前关于桥式抓斗卸船机的机器电气房设计的论述资料较少,通过对机器电气房的使用环境㊁结构功能的分析研究,在热量计算㊁结构计算㊁底盘结构设计等方面进行阐述,明确了机器电气房设计的每个环节,能够优化港机产品设计,同时也对码头的高效运行及安全生产起积极作用㊂参考文献[1]㊀潘钟林译.FEM 标准欧洲起重机械设计规范[M].上海:上海振华港口机械公司,1998.[2]㊀汪一骏,冯东,张志平.等.轻型钢结构设计指南(实例与图集)[M].北京:中国建筑工业出版社,2005.[3]㊀中华人民共和国建设部.钢结构设计规范[M].北京:中国计划出版社,2003.张金贵:200125,上海市浦东新区东方路3261号收稿日期:2021-07-25DOI:10.3963/j.issn.1000-8969.2022.02.009一种低姿态岸边集装箱起重机大梁平移精确控制方法王君毅㊀胡㊀石上海振华重工(集团)股份有限公司㊀㊀摘㊀要:介绍了一种新式低姿态岸边集装箱起重机的大梁平移精确控制方法㊂为克服大梁钢丝绳过于松弛对大梁平移的不良影响,在平移过程中使用编码器实时校准大梁位置,在大梁接近指定位置时及时减速,应用微动程序使大梁找到停止位置,并采用感应限位最终确认是否平移到位㊂经过多次反复试验,确认该方法能够使大梁准确快速地平移到指定位置㊂㊀㊀关键词:低姿态岸边集装箱起重机;大梁;平移;编码器;感应限位A Precise Control Method of Low-profile Quayside Container Crane Girder TranslationWang Junyi ㊀Hu ShiShanghai Zhenhua Heavy Industries Co.,Ltd.㊀㊀Abstract :A new precise control method of low-profile quayside container crane girder translation is introduced.Inorder to overcome the adverse effects of the loose rope on the translation of the girder,the encoder is used to calibrate the girder position during the translation.The girder decelerates in time when the girder approaches the designated position.Thedynamic program is applied to make the girder find the stop position,and the induction limit is used to finally confirm whether the translation is in place.After repeated tests,it is confirmed that this method can make the beam move to thespecified position accurately and quickly.㊀㊀Key words :low-profile shore container crane;girder;translation;encoder;induction limit72港口装卸㊀2022年第2期(总第263期)博看网 . All Rights Reserved.。
卸船机电控解决方案

卸船机电控解决方案一、引言卸船机是港口装卸作业中重要的设备之一,用于将货物从船舶上卸载到码头或储存区域。
卸船机的电控系统在实现高效、安全、可靠的卸货过程中起着至关重要的作用。
本文将介绍一种卸船机电控解决方案,旨在提供一种优化的控制系统,以满足卸船机高效运行的需求。
二、解决方案概述本解决方案采用先进的电控技术,结合卸船机的特点和需求,提供了一套完整的控制系统。
主要包括以下几个方面:1. 控制系统架构本方案采用分布式控制系统架构,将整个控制系统划分为多个子系统,通过网络进行通信和协调。
其中,包括主控制系统、传感器子系统、执行器子系统等。
通过分布式架构,可以实现系统的高可靠性和灵活性。
2. 控制算法本方案采用先进的控制算法,包括PID控制、模糊控制等。
通过对卸船机的运行状态进行实时监测和分析,采用合适的控制算法对电机、液压系统等进行精确控制,以实现卸船机的高效运行。
3. 人机界面本方案提供直观友好的人机界面,以便操作人员对卸船机进行监控和控制。
通过界面,操作人员可以实时获取卸船机的运行状态、故障信息等,进行相应的操作和调整。
4. 安全保护机制本方案考虑到卸船机作业的安全性,提供了多种安全保护机制。
例如,通过传感器监测卸船机的载荷、位置等参数,当超过设定的安全范围时,系统会自动停止运行,并发出警报。
5. 数据采集和分析本方案还提供数据采集和分析功能,可以对卸船机的运行数据进行实时采集和存储。
通过对数据的分析,可以了解卸船机的运行状况、故障原因等,为后续的维护和优化提供参考。
三、方案优势本卸船机电控解决方案具有以下几个优势:1. 高效性:通过先进的控制算法和优化的控制策略,实现卸船机的高效运行,提高装卸作业的效率。
2. 安全性:提供多种安全保护机制,确保卸船机作业过程中的安全性,减少事故发生的风险。
3. 可靠性:采用分布式控制系统架构,提高系统的可靠性,减少故障的发生和影响。
4. 灵活性:通过人机界面和数据采集分析功能,操作人员可以实时了解卸船机的运行状态,进行相应的调整和优化。
船舶交流电力系统的短路计算课件

t
2Ie Tdc
2
2
所以最大非对称短路电流
பைடு நூலகம்
I p 2Iac cost 2Iace tan 2(1 e tan )I
(8)
我们所关系的最大非对称短路电流是在t 时出现的短路全电流,它的值
是对称有效值的倍数n。亦称为冲击系数。 n
2(1 e tan )
(9)
冲击系数n与短路电路功率因子角?有关,其值在1.41~2.82间变化。
回路的时间常数 呈Td指数衰减,瞬时分量按激磁回路的时间常数指数衰
减。
14
1.交流同步发电机短路电流基本公式
取出一组来分析,设相电势
e 2I E sin(t )
同样,可根据电压平衡方程式,解微分方程式求得其全电流表达式
t
t
ig 2[(I g I g )e Td I g ]sin(t ) 2I g sin( )e Ta iacg idcg
2
且对称短路电流为最大时,即 t 或 t T 时,亦即在短路发生 2
后第一个半周期出现(当f=50Hz时,半个周期为 t T 0.01s )。
2
由于
t
it iac idc 2I sin(t ) 2Iac sin( )e Tdc
2I sin(t )
2I
s
in
(
t
)e Tdc
2I sin t
(1)
根据 e 2E sin(t ) ,先求得式(1)的通解,
再根据初始条件t=0时,i=0,求得i(t)的特解,即
I
i(t) 2I sin(t ) 2I sin( )e Tde iac idc (2)
式中 I E E
为短路电流交流分量有效值(A);
卸船机电控解决方案
卸船机电控解决方案1引言由于港口卸船机电控系统较为复杂,目前仍以全套引进为主。
本项目致力于卸船机自动化系统的技术开发,实现了国内自主知识产权的自动化港口卸船机电控系统。
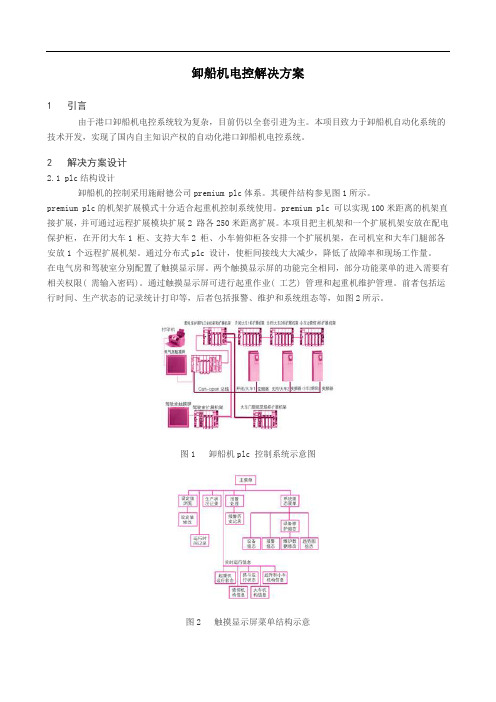
2解决方案设计2.1 plc结构设计卸船机的控制采用施耐德公司premium plc体系。
其硬件结构参见图1所示。
premium plc的机架扩展模式十分适合起重机控制系统使用。
premium plc 可以实现100米距离的机架直接扩展,并可通过远程扩展模块扩展2 路各250米距离扩展。
本项目把主机架和一个扩展机架安放在配电保护柜,在开闭大车1 柜、支持大车2 柜、小车俯仰柜各安排一个扩展机架,在司机室和大车门腿部各安放1 个远程扩展机架。
通过分布式plc 设计,使柜间接线大大减少,降低了故障率和现场工作量。
在电气房和驾驶室分别配置了触摸显示屏。
两个触摸显示屏的功能完全相同,部分功能菜单的进入需要有相关权限( 需输入密码)。
通过触摸显示屏可进行起重作业( 工艺) 管理和起重机维护管理。
前者包括运行时间、生产状态的记录统计打印等,后者包括报警、维护和系统组态等,如图2所示。
图1 卸船机plc 控制系统示意图图2 触摸显示屏菜单结构示意图3 plc 4 类任务执行方式示意2.2 软件任务设计premium的软件编程可分为4 类任务。
这样的分类方式使编程十分简便,如图3所示。
(1) 事件任务:紧急故障中断等;(2) 快速任务:抓斗半自动控制;(3) 主任务:起重机的运行控制和管理;(4) 系统任务:显示、打印、工艺管理等。
2.3 停车事件处理根据不同类型的停车请求和不同故障引起的停车事件,程序将停车模式分为4 种:(1) at1:单一机构紧停(相关机构机械紧急抱闸) ;(2) at2:单一机构快停(相关机构以最快速度电气停车) ;(3) at3:正常停车(相关机构按预定的停车降速斜率电气停车)(4) atg:起重机紧停(全部机构机械紧急抱闸) ;不同的停车请求或故障事件引发不同的停车过程,且每种停车过程由于其引发原因的不同有多种不同的复位要求和可能。
船舶交流电力系统短路电流计算
船舶交流电力系统短路电流计算♢计算电力系统短路电流的意义♢短路电流计算方法♢船舶交流电力系统的短路电流计算计算电力系统短路电流的意义▣校核所选用的保护电器的短路接通能力Icm和短路分断能力Icu 详见《供配电系统设计-系统协调性分析》▣校核电缆、汇流排等电路元件的电动力稳定性和热稳定性校核电缆汇流排等电路元件的电动力稳定性和热稳定性较大的短路电流可在两段平行导体间产生强大的相互作用力短路电流会在各电路元件中产生热效应,公式为Q=I ²t短路电流会在各电路元件中产生热效应公式为Q=I²t▣为电力系统保护的设计和整定提供依据电力系统上下级选择性协调动作和保护电器的整定♢CCS 规范所要求的计算项计算电力系统短路电流的意义即Iac 和ip计算电力系统短路电流的意义♢短路电流值对断路器的要求:▣短路分断能力大于最大对称短路电流值(t=T/2=10ms)一般负载:Icu >Iac重要负载:Ics >Iac▣短路接通能力大于最大短路电流峰值(t=T/2=10ms)所有情况:Icm >ip▣短时耐受能力大于预期对称短路电流值(t=tsd=200~400ms)所有B类断路器:Icw >Iac▣短路功率因数校正短路时的实际功率因数与断路器的试验功率因数存在差异,船短功率功率在差舶电网实际短路功率因数要小于断路器试验功率因数,因此断路器的分断能力应校正。
(具体详见规范-第四分册-附录B)的分断能力应校正(具体详见规范短路电流计算方法有几种,每一种计算方法都属于近似计算,是属于预估计算值可指导设计和选型并不是实际值短路电流计算方法是属于预估计算值,可指导设计和选型,并不是实际值。
所有的短路电流计算可简单理解为I = U / Z ,我们要做的是求出回路总阻抗。
▣标幺制法是一种是种相对单位制,标幺值为电参数有名值与基准值之比。
对于高压大容量电力系统,因各参数数值大,采用有名值计算较为繁琐,故常采用标幺值进行计算。
卸船机电气系统安全保护设计上的浅析2
卸船机电气系统安全保护设计上的浅析2 卸船机电气系统安全保护设计的浅析上海海得控制系统股份有限公司起重事业部龚吉关键词:安全继电器 SAFTY RELAY安全模块 SAFTY MODULE 变频器 INVERTER 人机界面 HMI起重机监控系统 CRANE MESSAGE SYSTEM 停车类别CATGORY STOP安全等级 SAFTY CLASS1. 概述卸船机主要有连续卸船机和抓斗式卸船机两类,目前国内大部分散货码头还主要是采用抓斗式卸船机。
上世纪九十年代前,中国还只能设计制造小吨位卸船机,经过二十多年的发展,我国已经可以自行设计制造2500吨/小时卸煤量的大型卸船机。
以国民经济的高速稳定发展,我国对卸船的需求量也持序增长,目前卸船机的机械部分设计制造均能由我国公司独立完成,国内主要的设计生产厂家有:上海振华,上海港机厂,中国华电工程等等;但电气方面的设计和调试,上述机械制造厂均大部分外包给外国公司,国内卸船机的电气设计制造基本上被ABB, SIEMENS , KONE , ALSTOM 等垄断。
在此浅谈一下卸船机的电气设计和选型。
2. 电气系统的配置电气系统的最上层为实时检测显示系统,它由触摸屏HMI,起重机监控系统(CMS)工控机,打印机等组成,其通过PROFIBUS DP 或ethernet 等与Page 1 of 12PLC间的通讯获取整机实时信息,完成整机运行状态的图形显示,故障显示,报警,报表管理等。
中间层为PLC,是系统的控制核心,由CPU单元,开关量I/O,模拟量I/O,通讯模块,高速计数模块等组成。
最下层为主传动层,由各机构变频器组成,所有变频器可通过各自的通讯卡挂在总线网上控制,也可全部通过端子控制命令和模拟量给定控制。
接受PLC的统一控制。
3. 安全原理设计硬件回路设计时要对整机系统进行分析,划分各个电气设备故障对卸船机产生的故障程度,包括对人身和设备的损害。
对每一个不安全因素进行评分,制定卸船机不安全因素评估和相应对策表,尽量消除或减少不安全因素。
卸船机旧设备电控系统综合改造(全文)
卸船机旧设备电控系统综合改造(全文) Abstract: The ship unloading machine is an important equipment of coal fired power plant, its working state highly affects the economic stability and fuel management of the coal handling system, the core equipment of ship unloader is its electric control system. Two ship unloading machines in A company have been running for more than ten years, gradually have a series of problems in recent years, such as decline of operation stability, the lack of technical support and high maintenance cost. Therefore, the author takes A company as an example, and has carried iton the thorough research.Key words: ship unloader;the transformation of the old equipment; electric control system;comprehensive transformationAXX:1006-4311(2021)23-0041-020引言本文主要就卸船机的运行、维护现状进行了全面分析。
两台卸船机上使用的电气系统设计方案在刚完成时,整套系统性能优良,运行稳定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
印尼(泗水)TELUKLAMON
2000T/H卸船机
电气报价文件
主要内容:一,电气设计计算说明书
编制赵国庆
审核
批准
南通润邦重机有限公司
2013年7月3日
一,电气设计计算说明书
我们参照IEC、FEM规范,按用户要求性,选用价比最好的电气系统;考虑本2000t/h卸船机机型的特点,采用变频调速方案;整流和逆变模块采用ABB产品,PLC采用西门子系列,变频器与PLC采用Profibus DP 通讯,并配置了监控装置系统、英文故障监测系统和CMS卸船机管理系统。
1,电源部分及负荷计算
1.1,供电方式:
本机采用6.6KV,50HZ,3相交流电。
供电方式是中压电缆卷筒,用户提供6.6KV,50HZ三相三线制电源,主变压器容量1600Kva,DYN11连接;副变压器容量250Kva,DYN11连接;6.6KV高压电缆(3*120+3*25,Φ70)连接于卸船机运行中心的地面中压接线盒,中压电缆经电缆张紧和导向装置到电缆卷筒上机,接入机上中压分线柜,再进入主、副中压开关柜;主、副中压开关柜自动控制主、副变压器的高压进线端,正常送电后,主、副变压器供电——经6.6/0.4KV/1600KV A主变压器输出端进入起重机总电源柜,向机上各机构提供动力电源;经6.6/0.4KV/400KV A副降压变压器输出端进入整机辅助电源柜,向机上各照明(维修、空调、加热)提供电源。
1.2,负荷计算
由上表可见,2000吨卸船机总装容量2004+130=2134KW
1.2.2,起升开闭机构总功率估算:
1).稳态起升功率P N(GB-T—3811-2008) : P2.1.1.1计算:
P N=Pq*Vq/1000η (P.1)
本机(满斗重量62000kg):
P N——电动机的稳态起升功率,单位为千瓦(KW);
Pq——额定起升载荷,单位为牛(N);对吊钩起重机应包括钢丝绳和吊具的重力,本机为62t(额定载荷) 3t(钢丝绳);
Vq——起升速度,单位为米每秒(m/s),本机满斗的最快速度为110m/min=1.83(m/s);
η——起升机构总效率,设本机起升开闭机构的总效率为95%。
根据本机情况:
P N=Pq*Vq/1000η=[(62t+3t)*980*1.83]/1000*0.95
=[65*980*1.83]/950
=1227KW
1.2.3,本机起升开闭电机是4个6极315KW的ABB电动机(额定电流567A),4*315=1260KW,由于电机可以过载,通过。
1.2.4,起升系统过载1.4倍时(FEM),处理为1227*1.4=1718KW,
1.2.5,总整流模块单元采用ABB ACS800-404-2100-3,重载使用功率为1392KW(2618A/400V),允许在40℃时以150%的电流在5分钟内连续运行1分钟:有,2618*1.5/1392=2813(KW),总整流模块通过。
1.3,主变压器选择:
1.3.1,最大工作电流计算:
单台机的额定电流按式(138)计算(GB-3811):
Iw=I N1+I N2+I N3+I AUXI (138)
式中:
Iw ——总进线电缆或滑线的额定工作电流,称作卸船机工作电流,单位为安培。
I N1——功率最大机构电动机的额定工作电流,710A(起升机构),单位为安培。
I N2,I N3——其它两个可能同时工作的机构电动机的额定工作电流710A(开闭机构)、500A(小车)。
I AUXI——辅助电气设备与控制所需的额定工作电流,80A。
所以Iw=I N1+I N2+I N3+I AUXI=710+710+500+80=2000(A)
根据上述计算,总断路器选ABB产品,额定电流为2000A,兼具欠压脱口跳闸、短路及过流、过载保护。
1.3.2,主中压变压器最大输出容量计算,
Pt2A=√3{I j xUn}=√3{I W x Un}=√3x2000x0.38=1316.32(Kva)
1.3.3,主中压变压器容量计算
Pt= Pt2/η=1316.32/0.98=1334.20 Kva
式中η为中压变压器的效率,故选本门机的中压降压变压器PtA的容量为1600 Kva.的标准产品。
3.4,主中压变压器的一次电流计算
It1a= PtA/√3(Ut1)=1600 Kva/√3cosФ6.6KV=1600/1.732*0.85*6.6=165A
1.4,副变压器选择:
1.4.1,由表
2.1可见,2000t/h抓斗卸船机辅助回路的配置容量为130kw,
1.4.2, 副中压变压器容量计算
Pt= Pt2/η=130/ 0.98=134Kva
式中η为中压变压器的效率,初选本门机的副中压降压变压器PtB的容量为160 Kva.,但考虑到万一动力系统故障,大车和臂架都要用副变压器电源驱动,故选副中压降压变压器PtB的容量为250 Kva.的标准产品。
1.4.3,副中压变压器的一次电流计算
It1b= PtB/√3(Ut1)=250 Kva/√3cosФ6.6KV=250/1.732*0.85*6.6=26A
1.5.1,为减少成本,选用一个中压电缆卷筒,
1.5.2,中压电缆卷筒的最大工作电流为:It1a + It1b=165+16=181(A)
根据上表数据,考虑机械强度,选用耐压等级为10KV,截面为3x95+3x50/3平方毫米的(TKD)高电压等级卷盘软电缆。
1.6,主、副变压器进线中压电缆选择:
1.6.1,主变压器进线中压电缆选耐压等级为10KV,截面为3x95+3x50/3平方毫米的((N)TSCGEWÖU
TKD,德国)高电压等级卷盘软电缆;
1.6.2,副变压器进线中压电缆选耐压等级为10KV,截面为3x25+3x25/3平方毫米的((N)TSCGEWÖU
TKD,德国)高电压等级软电缆。
1.7,低压总电源2000A,到主变压器、到整流柜,每相电源线用4根300(mm2)铜线拼,接地线也是4根300(mm2)铜线拼;
1.8,直流总母线到起升开闭控制柜的主线,每相用2根300(mm2 )铜线拼;到起升开闭电机的电缆每相用2根
185(mm2 )铜线拼接;到大车分线柜的总电源线每相用2根95(mm2 )铜线拼接;
1.9,直流总母线到小车控制柜的主线,每相用2根150(mm2 )铜线拼;到小车电机每相用2根120(mm2 )铜线拼
接;到前臂架电机每相用1根95(mm2 )铜线接;
1.10,大车电机用3*4+1*1.5电缆。
1.11,制动器和电机风机用3*
2.5+1*1电缆。
1.12,多芯控制线用1*(N*1.5)电缆和1*(N*
2.5),N=2,7,14,19,1.13,屏蔽线用1*4*0.75、1*6*0.75;
2.主要电缆汇总表:。