2-3 脉冲响应及离散系统
第五章 时域离散系统的基本网络结构
本章的主要内容就是描述数字滤波器的基 本网络结构。(IIR、FIR)
引言
时域离散系统或网络可以用差分方程、单 位脉冲响应以及系统函数进行描述。
M
N
y(n) bi x(n i) ai y(n i)
i0
i 1
系统函数H(z)为
M
H (z)
(2) 流图环路中必须存在延时支路;
(3) 节点和支路的数目是有限的。
信号流图表达的系统含义
每个节点连接的有输入支路和输出支路,节点变 量等于所有输入支路的输出之和.
根据信号流图可以求出系统函数(节点法、梅逊 公式法)。
1(n) 2 (n 1) 2 (n) 2 (n 1) 2 (n) x(n) a12 (n) a21n y(n) b21(n) b12 (n) b02(n)
画出H(z)的直接型结构和级联型结构。
级联型
解: 将H(z)进行因式分解,得到: H(z)=(0.6+0.5z-1)(1.6+2z-1+3z-2)
其直接型结构和级联型结构如图所示。
x(n)
0.6
z- 1 0.5
1.6 z- 1
2 z- 1
3
y(n) x(n)
z- 1
z- 1
z- 1
0.96 2
2.8 1.5 y(n)
0 j
y(n)
1 j
z- 1 1j
1 j
z- 11 j
(a)
2 j
z-
1
2
j
(b)
一阶和二阶直接型网络结构 (a)直接型一阶网络结构;(b)直接型二阶网络结构
IIR的级联型例题
《现代控制理论》(刘豹_唐万生)
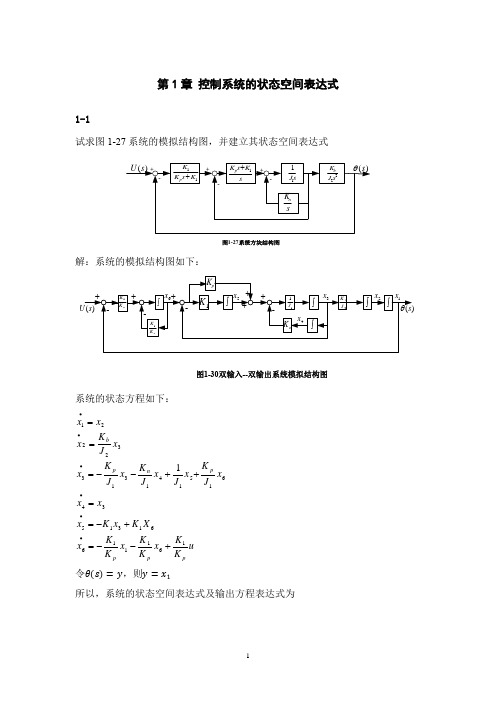
第1章 控制系统的状态空间表达式1-1试求图1-27系统的模拟结构图,并建立其状态空间表达式图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===••••••令θ(s)=y ,则y =x 1所以,系统的状态空间表达式及输出方程表达式为[ x 1•x 2•x 3•x 4•x 5•x 6•]=[ 01000000K b J 200000−K p J 1−K n J 11J K p J 100100000−K 100K 1−K 1p−K 1p ][ x 1x 2x 3x4x 5x 6]+[ 00000K 1K p ]uy =[100000][ x 1x 2x 3x 4x 5x 6]1-2有电路如图1-28所示。
以电压u(t)为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻R 2上的电压作为输出量的输出方程。
L1L2U图1-28 电路图解:由图,令i 1=x 1,i 2=x 2,u c =x 3,输出量y =R 2x 2 有电路原理可知:R 1x 1+L 1x 1•+x 3=uL 2x •2+R 2x 2=x 3x 1=x 2+Cx 3•既得 x 1•=−R1L 1x 1−1L 1x 3+1L 1ux •2=−R 2L 2x 2+1L 2x 3 x 3•=−1C x 1+1C x 2y =R 2x 2写成矢量矩阵形式为:[ x 1。
x 2。
x 3。
] =[−R 1L 10−1L 10−R 2L 21L 21C−1C 0][x 1x 2x 3]+[1L 100]u y =[0R 20][x 1x 2x 3] 1-3有机械系统如图1.29所示,M1和M2分别受外力f1和f2的作用.求以M1和M2的运动速度为输出的状态空间表达式.解:以弹簧的伸长度y 1,y 2 质量块M 1, M 2的速率c 1,c 2作为状态变量 即 x 1=y 1,x 2=y 2,x 3=c 1,x 4=c 2根据牛顿定律,对M 1有:M 1dc1dt =f 1-k 1(y 1-y 2)-B 1(c 1-c 2) 对M 2有:M 2dc2dt =f 2+k 1(y 1-y 2)+B 1(c 1-c 2)-k 2y 2-B 2c 2将x 1,x 2,x 3,x 4代入上面两个式子,得 M 1ẋ3=f 1-k 1(x 1-x 2)-B 1(x 3-x 4) M 2ẋ4=f 2+k 1(x 1-x 2)+B 1(x 3-x 4)-k 2x 2-B 2x 4B 1\y 2 c 2 y 1 c 1f 2(t)M 2M 1f 1(t) B 2 K 2K 1整理得 ẋ1=x 3ẋ2=x 4ẋ3=1M 1f 1-k 1M 1x 1+k 1M 1x 2-B 1M 1x 3+B1M 1x 4ẋ4=1M 2f 2+k1M 2x 1-k 1+k 2M 2x 2+B1M 2x 3-B 1+B 2M 2x 4输出状态空间表达式为 y 1=c 1=x 3 y 2=c 2=x 4 1-4两输入u 1,u 2,两输出y 1,y 2的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
自动控制原理复习提纲

第一章绪论1、基本概念(1)自动控制:在没有人直接参与的情况下,利用控制器使被控对象(或过程)的某些物理量(被控量)自动地按预先给定的规律去运行。
(2)自动控制系统:能够实现自动控制任务的系统,由控制装置与被控对象组成。
(3)被控对象:指被控设备或过程。
(4)输出量,也称被控量:指被控制的量。
它表征被控对象或过程的状态和性能,它又常常被称为系统对输入的响应。
(5)输入量:是人为给定的系统预期输出的希望值。
(6)偏差信号:参考输入与实际输出的差称为偏差信号,偏差信号一般作为控制器的输入信号。
(7)负反馈控制:把被控量反送到系统的输入端与给定量进行比较,利用偏差引起控制器产生控制量,以减小或消除偏差。
2、自动控制方式(1)开环控制开环控制系统指系统的输出量对系统的控制作用没有影响的系统。
它分为按给定控制和按扰动控制两种形式。
按给定控制:信号由给定输入到输出单向传递。
按扰动控制(顺馈控制):根据测得的扰动信号来补偿扰动对输出的影响。
(2)闭环控制(反馈控制)闭环控制系统指系统的输出量与输入端存在反馈回路,即输出量对控制作用有直接影响的系统。
系统根据实际输出来修正控制作用,实现对被控对象进行控制的任务,这种控制原理称为反馈控制原理。
3、自动控制系统的分类(1)按给定信号的特征分类①恒值控制系统:希望系统的输出维持在给定值上不变或变化很小。
②随动控制系统:给定信号的变化规律是事先不确定的随机信号。
③程序控制系统:系统的给定输入不是随机的,而是确定的、按预先的规律变化。
(2)按系统的数学模型分类⎧⎧⎧⎪⎪⎪⎪⎪⎪−−−→⎨⎪⎪⎪⎪⎪⎨⎪⎪⎩⎪⎪⎪⎧⎪⎪−−−→⎨⎨⎪⎩⎩⎪⎪⎧−−−→⎪⎪⎪⎧⎪⎨⎪⎪−−−→⎨⎪⎪⎪⎪⎪⎩⎩⎩分析法分析法分析法分析法时域法根轨迹法线性定常系统频域法线性系统状态空间法时域法线性时变系统状态空间法非本质非线性线性化法描述函数法非线性系统本质非线性相平面法状态空间法 (3)按信号传递的连续性划分①连续系统:系统中的所有元件的输入输出信号均为时间的连续函数,所以又常称为模拟系统。
计算机控制系统复习资料(精简版 列出重点知识点)
第一章概论,讲述计算机控制系统的发展过程;计算机控制系统在日常生活和科学研究中的意义;计算机控制系统的组成及工作原理;计算机控制的特点、优点和问题;与模拟控制系统的不同之处;计算机控制系统的设计与实现问题以及计算机控制系统的性能指标。
1.计算机控制系统与连续模拟系统类似,主要的差别是用计算机系统取代了模拟控制器。
2.计算机系统主要包括:.A/D转换器,将连续模拟信号转换为断续的数字二进制信号,送入计算机;.D/A转换器,将计算机产生的数字指令信号转换为连续模拟信号(直流电压)并送给直流电机的放大部件;.数字计算机(包括硬件及相应软件),实现信号的转换处理以及工作状态的逻辑管理,按给定的算法程序产生相应的控制指令。
3.计算机控制系统的控制过程可以归结为:.实时数据采集,即A/D变换器对反馈信号及指令信号的瞬时值进行检测和输入;.实时决策,即计算机按给定算法,依采集的信息进行控制行为的决策,生成控制指令;.实时控制,即D/A变换器根据决策结果,适时地向被控对象输出控制信号。
4.计算机控制系统就是利用计算机来实现生产过程自动控制的系统。
5.自动控制,是在没有人直接参与的情况下,通过控制器使生产过程自动地按照预定的规律运行。
6.计算机控制系统的特性系统规模有大有小系统类型多种多样系统造价有高有低计算机控制系统不断推陈出新7.按功能分类1)数据处理系统2)直接数字控制(DDC)3)监督控制(SCC)4)分散型控制5)现场总线控制系统按控制规律分类1)程序和顺序控制2)比例积分微分控制(PID)3)有限拍控制4)复杂控制5)智能控制按控制方式分类1)开环控制2)闭环控制9.计算机控制系统的结构和组成控制算法软件网络硬件11.硬件平台运算处理与存储部分:CPU,存储器(RAM,ROM,EPROM,FLASH-ROM,EEPROM以及磁盘等),时钟,中断,译码,总线驱动等。
输入输出接口部分:各种信号(模拟量,开关量,脉冲量等)的锁存、转换、滤波,调理和接线,以及串行通讯等。
信号与系统考试试题及答案

长沙理工大学拟题纸课程编号1 拟题教研室〔或老师〕签名 教研室主任签名符号说明:sgn 〔f 〕为符号函数,仇,〕为单位冲击信号,/幻为单位脉冲序列,仪,〕为单位阶跃信号,式k 〕为 单位阶跃序列.一、填空〔共30分,每题3分〕1,f ⑴=〔尸+4〕4f 〕,求/"〔,〕=.*0〕 + 45⑺2,/'〔%〕 = {12-2,1},〃〔攵〕={3,424},求/〔攵〕*/#〕 = /〔攵〕*/?〔%〕 = {3,10,4,38-6,4} 3 .信号通过系统不失真的条件为系统函数""&〕= ------------ ° HljcoH't江 4江「/、/〔-〕Oax= ------- =—— 4 .假设/⑺最高角频率为那么对 4取样的最大间隔是 -------------- . 练ax /5 .信号/〔,〕= 4cos20加+ 2COS 30R 的平均功率为6 .一系统的输入输出关系为〕C 〕= /'〔3/〕,试判断该系统是否为线性时不变系统 --------- O 故系统为线性时变系统.F 〔5〕=--——! --7 .信号的拉式变换为 .一+1〕〔5-1〕,求该信号的傅立叶变换/〔/8〕= ----------- .故傅立叶变换/O&〕不存在.H ⑵= -- ----- \ ----- r8 .一离散时间系统的系统函数 2 + z7-z--,判断该系统是否稳定 -------------- .故系统不稳定.「〔/+2f 〕6〔T + lk 〃 =9 . J -x--------- 0 310 .一信号频谱可写为/〔jMnA^y 乂iQA^y 〕是一实偶函数,试问/⑺有何种对称性 ------------------- .关于仁3的偶对称的实信号.二、计算题〔共50分,每题10分〕1 .连续时间系统的单位冲激响应〃“〕与鼓励信号/«〕的波形如图A-1所示,试由时域求解该系 统的零状态响应〕'0〕,画出〕'〔/〕的波形.图A-12 .系统的零状态响应〕"〕= /«〕*〃0〕,其波形如图A-7所示.X P= Z|K 「= 22 +22 +l + l = 10 J?-w3.在图A-2所示的系统中,〕〔%〕 = 66-2〕,〃2〔幻=〔0・5〕匕〔%〕,求该系统的单位脉冲响应M2〕.图A-22 h(k)=6攵)+ 4(k) * h<k) = 5(k) + b(k - 2)* (0.5)匕网=3(k) + (0.5)k^2£(k - 2)4.周期信号/«〕的双边频谱如图A-3所示,写出/⑺的三阶函数表示式° 〕< 2 〔.M -1 »~ =2 |0 2 3 n图A-35.写出周期信号/⑷指数形式的傅立叶级数,利用欧拉公式即可求出其三阶函数表示式为8/«〕=2"."%=/2叩+2/3+2 + 2/卬 +/如=2 + 4cos/f +2cos24fK-006.信号f⑴=4/〕- - 1〕通过一线性时不变系统的响应〕«〕如图AK所示,试求单位阶跃信号£«〕通过该系统的响应并画出其波形.图A-4X0= /«〕+/〔1〕+…+/〔1〕+…=Z/〔i〕4.由于 5 故利用线性时不变特性可求出£«〕通过该7W〕} = W>〔D系统的响应为・. 波形如图A-8所示.进行拉斯反变换可得〃(,)=*+2_*)初*•J 1 4 完全响应为y(t) = y x (t) +e-2t -e-5\t>05.己知/⑺的频谱函数/C/3)= Sg 〃3+l )-Sg 〃3-l),试求/⑷,2, 同 < 1F(jco) = Sgn(co +1) - Sgn(a )-1) = < =2g 2(co)5.I 〞网>1 ,由于g2")0 2Sa (⑼,由对称性可得:254.)= 2咫2(-助=2甯2(助,因此,有2/(,) = — S 〃(f)丸三、综合计算题(共20分,每题10分)1. 一线性时不变因果连续时间系统的微分方程描述为),〞(/) + 7/(0 +1 Oy(t) = 2r ⑺ + 3/(r)")=f),y (吁1,y (°-)=1,由s 域求解:(1)零输入响应K"),零状态响应完全响应>'(');⑵系统函数"(S ),单位冲激响应并判断系统是否稳定: ⑶画出系统的直接型模拟框图.解:L (1)对微分方程两边做单边拉斯变换得S 2Y(S )-孙(.-)-y (0-) + 75/(5)_ 7y(0_) + 10Y(s) = (2s + 3)尸(s) 整理后可得y (s )=s ),(0-) + y (0-) + 7),(0-) + 2s+ 3 F"s 2 +75 + 10 s 2+ls + \O 零输入响应的s 域表达式为Z (s )=5 + 82-1— ---------------- - =------------ H ---------:s 〜+ 7s + 10 5 + 2 5 + 5进行拉斯反变换可得 y4)= 2c-2—零状态响应的S 域表达式为,(s) =25 + 3 1+7s + 10 /.)=25 + 3 (1 + 7s + 10)(s+ 1)1/4 1/3 12/7---- + ------- - -------- 5+1 5+2 S+5图A-8(2)根据系统函数的定义,可得“、乙⑸ 2s+ 3-1/3 7/3H(s)=-——=- ------------------ = ------- + ------F (5) S 2+7S + \0 S + 2 S + 5进行拉斯反变换即得i 7由于系统函数的极点为-2、-5,在左半s 平而,故系统稳定.2J +3s-2 l + 7s-10s-2由此可画出系统的直接型模拟框图,如图A-9所示y(k) + 3y(k -1) + 2y(k -2) = f(k)k>0f (k) = £(Z),y(—l) = -2, M —2) = 3,由 z 域求解:(1)零输入响应汽(幻,零状态响应力(幻,完全响应〉'伏); (2)系统函数“(Z ),单位脉冲响应做攵). (3)假设/(") = £(4)-£(攵-5),重求 ⑴、(2).2. (1)对差分方程两边进行z 变换得y (z) + 3{z-'y (z) + y(-l)} + 2{z-2y(Z) + r'y(-l) + y(-2)}=尸(z) 整理后可得 y (7} = -3y(-1)-2d)-2y(-2) =4z- = 44 ,' 1 + 3z-i + 2z"1 + 3Z "+2Z -2 \ + z7 1 + 2—进行z 变换可得系统零输入响应为工也)=[4(—/一4(一2)〞—(幻零状态响应的Z 域表示式为v/、 /⑵1 1 1/6 -1/2 4/3Y ( 7)= ____________ = __________________ _ _______ p _______ I ------------ fl + 3z~l +3z~2 \ + 3z'l +3z'2 1-Z -' (1-Z -1) (1 + Z-1) (l + 2z-1) 进行z 反变换可得系统零状态响应为1 ।3,伙】=[厂7(-1)〜:(一2力£(公6 2 4系统的完全响应为7 X 1y(k) = y x + y f (k) = [-(-1)A --(-2)k +&上(k)(2)根据系统函数的定义,可得"(s) =⑶将系统函数改写为2. 一线性时不变因果离散时间系统的差分方程描述为y f(z)i"l + 3^+2^2一1 2T+7r+T+27r进行z反变换即得万(攵)=[—(—iy+2(—2 门£(幻(3)假设八外二以幻一式卜-5),那么系统的零输入响应外(幻、单位脉冲响应Mk)和系统函数〞(乃均不变, 根据时不变特性,可得系统零状态响应为T{£(幻一£(攵- 5)}=力(幻一y f (k - 5)1 1 Q 1 1 Q6 2 4 6 2 4完全响应为y(k) = y x(k) + T[£(k)-£(k-5)}] 7 8 1 1 3o 2 3 o 2 4长沙理工大学拟题纸课程编号 2 拟题教研室(或老师)签名教研室主任签名符号说明:sgn(f)为符号函数,5(E)为单位冲击信号,演幻为单位脉冲序列,£«)为单位阶跃信号,£(*)为单位阶跃序列.一、填空(共30分,每题3分)y(t) = !-4-2X(0)1.某系统的输入输出关系为力(其中X(0)为系统初始状态,/⑺为外部激励),试判断该系统是(线性、非线性) -------------- (时变、非时变) ------------ 系统.线性时变广(2r2+3r)J(lr-2)Jr = _______________2. J 2 0 04 j:s(2t - 2)5(4 - 2t}dt =J:s(2t- 2)e(4 - 2f)力=J:dt = 1K-04.Z(k) = 2k{s(k)~ 式k -3)) J; (k) = {2, S ,3},计算于仆)*f式k) =力(%)*力(幻={21,21,26,12}5.假设信号/⑷通过某线性时不变系统的零状态响应为力⑴=监.—0),(<,0为常数)那么该系统的频率特性〞(13)= ------------- 单位冲激响应〃(/)= ------------ J 系统的频率特性"(W) = K .*,单位冲激响应/") = K /一°).6 .假设/“)的最高角频率为九(%),那么对信号y(,)= /«)/(2f)进行时域取样,其频谱不混迭的最大取样T丁 心=钙一= TT (s )间隔,max- -------------- ,maK 为 max inF'(s)=—;——! ----7 .信号的拉式变换为("+1).-1),求该信号的傅立叶变换尸(/.)= --------------- ,不存在8 .一离散时间系统的系统函数 2 + Z-I-Z--,判断该系统是否稳定 ------------ o 不稳定「(/+21)6(-/ + 1卜〃=9 . J-K10.一信号频谱可写为尸(,⑼二人侬州一衣)(⑼是一实偶函数,试问/«)有何种对称性 ,因此信号是关于1=3的偶对称的实信号.二、计算题(共50分,每题10分)1 .一连续时间系统的单位冲激响应乃 ,愉入信号/(')= 3 +.32人一8〈'〈8时,试求该系统的稳态响应.二、解:1 .系统的频响特性为 H .&) = FT[h(t)] = ; ge (°)=利用余弦信号作用在系统上,其零状态响应的特点,即T {cos^r + 0)] = \H(ja^ )| cosQj + 认例)+ 6)可以求出信号/(0 = 3+cos2r,-eo<r < 8 ,作用在系统上的稳态响应为} = 1 + —cos2z,—O0< z V82 .信号/(2f + 2)如图A -1所示,试画出/(4-2,)波形.i/(2r + 2)图A-l2 . /(2/-2) -/(4-2/),根据信号变换前后的端点函数值不变的原理,有 /3+2) = /(4-2%) /(2r 2+2) = /(4-2G 2)'1/3,罔<3 0, \co\> 3-2-1变换前信号的端点坐标为4 =2,〃 =-2,利用上式可以计算出变换后信号的端点坐标为Zu = (4 — 2/1 — 2)/2 = —1J22 = (4 —-2)/2 = 3由此可画出/(4-2,)波形,如图A-8所示.3.信号/⑴如图A-2所示,计算其频谱密度函数/"⑼.4.信号/⑺可以分解为图A-10所示的两个信号与八")之和,其中&(f)=超(助 + -!-/i (r) = 2s{-t + 2) = 2s[-(t - 2)] e由于jco根据时域倒置定理:/(-Do〞一/⑼和时移性质,有再(/⑼=F71£(T + 2)1 = 2 昉(3)— -—F2(汝)=FT[f2(t)] = 6s-3) 故利用傅立叶变换的线性特性可得4.某离散系统的单位脉冲响应〃(幻=KT)'5+(一°・5)1]夕心,求描述该系统的差分方程.4.对单位脉冲响应进行z变换可得到系统函数为“-1 — 2 _ - 3-2,5z 1‘-1 + z-1 + 1+0.5Z-1 " l + 1.5z-| +0.5z-2 由系统函数的定义可以得到差分方程的z 域表示式为(1 +1"1+ O&T)y f⑵=(-3 - 2.5/ )F(z) 进行z反变换即得差分方程为y(k) + \.5y(k - 1) + 0.5y(k -2) = -3/'(2)一25f* - 1)5.一离散时间系统的模拟框图如图A-3所示,写出该系统状态方程和输出方程.X](k + 1) = 一ax[(攵)+ f(k \ x 2(k + 1) = -bx?(k) + f(k) 国绕输出端的加法器可以列出输出方程为X (左)=为⑹ + x 2(k\y 2(k) = x l (幻 + 々⑹写成矩阵形式为三、综合计算题(共20分,每题10分)1.描述某线性时不变因果离散时间系统的差分方程为31y ⑹一力…+邛.2) = 2浜)+ 3〃1)人.f(k) = £(⑥,><-1) = 2, y(-2) = -l在Z 域求解:(I)系统的单位脉冲响应力(幻及系统函数〞(Z ): (2)系统的零输入响应以(公; (3)系统的零状态响应力"(外;(4)系统的完全响应)'("),暂态响应,稳态响应; (5)该系统是否稳定?.对差分方程两边进行z 变换得31丫 ⑵一⑵+>-1)}+7{4丫&) + %-.(-1)+义-2)} = (2+32-1)尸⑵48整理后可得3 1 1 4''(T )_ Q M-l) _ 77 y (-2)2 + 37T y (Z) = ------------ ——1——十; \ F(z) 1-1 —、+-尸 4 848(1)根据系统函数的定义,可得5.根据图A-5中标出的状态变量,围绕输入端的加法器可以列出状态方程为玉(左+ 1)x^(k +1)一.玉(女)-b x4k)—J — 11 + 1 f(k)升⑹=1 丁2(幻 1 1 _内(幻 1 々(幻h*) = F-i [H(z)] = [16(1/-14(;了阳.r 1 x ✓ 1 \k 14 1^ 40q . »(^) = [-16(-) + —(-) +—]^) 乙 J J (4)系统完全响应/,、〃、「55」、氏 97」、氏 40 小y(k) = y x (k} + y f (k) = [-—(-) + —(-) + —^)「55/、氏 97/ g 小40 〃、 [——(一)+ — (一) ]£(攵)£(k)从完全响应中可以看出, 4 2 24 4 随着k 的增加而趋于零,故为暂态响应,3 不随 着k 的增加而趋于零,故为稳态响应.(5)由于系统的极点为号=1/2,与=1/4均在单位圆内,故系统稳定.2.试分析图A-4所示系统中B 、C 、D 、E 和F 各点频谱并画出频谱图./⑷的频谱尸"&)如图A-6,&.(/)=&(,_"),丁 = 0・.2K--<»B 、C 、D 、E 和F 各点频谱分别为品(/助=4 £#3-〃线),4 =:=100乃 //---X * 11 00xF&S = — F(y<y)*F^(j6?) = -g) = 50 2/3-"100冗)F D (J3) = Fc (J 2 Hi(ja ))F E (jTy) = —[F D (CO +\ 00^-) + F D (d )-l 00^)]2进行z 反变换即得"⑵= 〃⑵= 2 + 3尸 = _____________ + ________尸⑵ 1 3 T 1 -2 1 1-1 1 1-1 4 8 2 416 -14 (2)零输入响应的z 域表达式为 3 1 17 y(_ 1)--^1 >(_ 1)- 3 y (-2) 工口)=^——H« D T 1 一,4 取z 反变换可得系统零输入响应为13 1 T豆一/ _ 9/4 T -5/8< 3 _[ 1 _*) . 1 _1 . 1 -1 1——Z 、-z - 1 —— Z 1--Z 4 8 24(3)零状态响应的z 域表达式为'⑵=-v~~~\ -------------- /⑵= 48取z 反变换可得系统零状态响应为2 + 3z 〞-16 14/3 40/3(4*z-2)(T )一干+ 干+中-20r2(»,r0.1F「(〃>) = Y (〃)) = F E (ja))H2( jco)长沙理工大学拟题纸课程编号 3 拟题教研室(或老师)签名教研室主任签名符号说明:sgn(f)为符号函数,须,)为单位冲击信号,演幻为单位脉冲序列,£«)为单位阶跃信号,式卜)为单位阶跃序列.一、填空(共30分,每题3分)1.假设信号/⑴通过某线性时不变系统的零状态响应为»⑴=灯Q T.), (K /为常数)那么该系统的频率特性---------------- ,单位冲激响应〃")= ------------- .系统的频率特性"(W)= Ke〞.,单位冲激响应力⑺=K"I.).2.假设/⑺的最高角频率为/£法),那么对信号>.)=/(,)/(2,)进行时域取样,其频谱不混迭的最大取样丁 1 1 ,、J = ----------- = ------ (S)T ___ T max o, 久 '间隔ma、- ...... , max 为max ./〃73J:£(2t - 2)5(4 - 2t}dt =J:s(2t- 2)e(4 - 2t)dt = j dt = 14,工⑹=2"{仪外一£伙一3)}/伙)={2,5,3},计算工(幻*/2的=0/(攵)*/式外={2621,26,12}),«)= /"⑺+ 2X(0) 乙,、5.某系统的输入输出关系为“dt(其中X(0)为系统初始状态,/«)为外部激励),试判断该系统是(线性、非线性) -------------- (时变、非时变) -------------- 系统.线性时变,3 , 1I ⑵2+3/2(—— 2)4 = _____________6. J 2 o 0+3相-2/⑶=一,(Re(s) >.),7.某连续信号的单边拉式变换为5(厂+9) 求其反变换/«)=------------ cf (/) = (2cos3f+ 6“ sin 3r)ty(f)8,a二口e ' 〞"'>-2'计算其傅立叶变换Y(j°)= ----------------------------------------- .r(»=.—!—=——----------------------------------jco+2 jco+5 (汝尸+7/G+lOE(z)=?「二幽 >3) 9.某离散信号的单边z 变换为(z — 2)(z + 3),求其反变换/(&)= -------------/(幻=z*F(s)]=⑵ + (-3)、伏)h(t) = —「H(jco)e J6X dt =—「e-w ./晨〃 =—「/*年力=冬2乃 Lx 2 4 2 万 L%n二、计算题(共50分,每题10分)1./⑴的频谱函数尸(j3)= Sg 〃3+l)-Sg 〃3-l),试求/⑺.[2,同<1 F("D ) = Sgn(a )+1) - Sg 〃3-1) = S=2g 2(a ))1.m 网,由于g2")= 2Sa ⑼,由对称性可得:254(/) = 2咫2(-助=2砥3),因此,有 22.h(t) = . (/) + J(/)]* [% ⑴ + — = [£(f -1) + 6(f)] *_2) + e -2^(f)]=-1) *- 2) +-1) *+ J(O* 2) + J(r)* e^2,£(t)-6 ]=—(1 - e-3"3))£« - 3)+ 一(1 - e-2"-D )£(f _ 1)+e^£(t - 2) + e^s(t) 3 23.信号/")和g")如图A-2所示,画出了⑺和g«)的卷积的波形.3 . /«)和g«)的卷积的波形如图A-9所示."(1&) =、10.某理想低通滤波器的频率特性为“3 间 < 纵° 其他 ,计算其时域特性的)=0)]2.某系统如图A-1所示,求系统的各单位冲激响应.其中九⑴=e[t -1), h 2 (r) = e-3,s(t - 2), h 3 (r) = e-2,S (t)图A-l4.某连续时间系统的系统函数〞⑸悬,画出其直接型系统模拟框图,并写出该系统状态方程的输出方程.H〔5〕= ------ : -----5.将系统函数改写为l + 5sy+3s-由此可画出系统的直接型模拟框图,如图A-11所示.选择枳分器的输出作为状态变量,围绕模拟框图输入端的加法器可得到状态方程为图A-11£⑴=%2.〕, ±2 ⑴=f〔0 - 5%2 ⑴ + f ⑴围绕模拟框图输出端的加法器可得到输出方程为刈=7王«〕 + 2勺〔,〕6.试证实:用周期信号力"〕对连续时间带限信号/«〕〔最高角频率为〕取样,如图A-3所示,只要取样间隔咻,仍可以从取样信号人"〕中恢复原信号图A-35.利用周期信号频谱和非周期信号频谱的关系可以求出心"〕的傅立叶系数为厂1 r n T 0 2产绮、 24F,t = T2Sa =2T Sa〕.°=于由此可以写出周期信号fr⑺的傅立叶级数展开式M )= »产=E 等)*知n--oox // 一 对其进行傅立叶变换即得fr (0的频谱密度F T .&)片(/⑼=2乃 £-〃%)X 乙1今取样信号工⑴=/(/)力,(/),利用傅立叶变换的乘积特性可得j ①)=;F (J ⑼*耳(J ⑼=£ 2S/(竺产)F3-〃g) 2乃 n —0C 2/ 4从以(/助可以看出,当为之24r 时,工(/⑼频谱不混迭,即◎〞仍可从取样信号方⑺中恢复原信号f"三、综合计算题(共20分,每题10分)1.描述某线性时不变因果连续时间系统的微分方程为y"(O + 7y «) +10y (0 = 2/〞 ⑺ + f[t}f ⑴=/£«),)=4, y (o -)=-3,在 s 域求解:(1)系统的单位脉冲响应/?〞)及系统函数H(s). (2)系统的零输入响应/〞) (3)系统的零状态响应‘7")(4)假设/«) = /"-"£«-1),重求(1)、⑵、⑶.解:1.对微分方程两边做单边拉斯变换得S 2Y(S )-町(.一)一 y (0") + 75/(5)- 7),(0-) + 10X(5)= (2s + 1)F (5) 整理后可得(1)根据系统函数的定义,可得进行拉斯反变换即得/z(O = (-^2/+3^5r )f(r)(2)零输入响应的s 域表达式为U/、 45 + 25 -5/3 17/3Y(s) = - ..................... = -------- + ------+75 + 10 5 + 2 5 + 5取拉斯反变换即得yx (')= _ge-2' +y-^5/,r >0(3)零状态响应的s 域表达式为取拉斯反变换即得匕 «)=(-0.25eT +^2/ -0.75e-5z )^(r)请浏览后下载,资料供参考,期待您的好评与关注!y (s )=) 一/(O-) + 7y(0-) 25 + 1s 2 +75 + 10s 2 +75 + 10 JJH(s) =Yf (s) 2s + 1 -1 3尸⑸— ----------- = --------- F ----- s-+7s + 10 s + 2 s + 5 25 + 1 /(S )= T(s- +75 + 10)(5 + 1)-0.25 1-0.75 + --------5 + 56. /(0 = [£(t +1) - £{t - l)]cos(100r) 的 频 谱 F*o) =FT{ [s(t +1) - £(t — l)]cos(l OOf)} = Sa(co - 100) + Sa(co +100)g _ /?(k) = g ⑹ 一 g(A — 1) = (ft ⑹ - (g)h*(攵-1)8,假设 /(0 = 2 + 4cosCOr) + 3cos(20r),(-o < r < oo) 3)= 10为基频),那么 f(t)的平均功率P=f 方「= 2? +22 + 2? + (32 + (1)2 = 16.54t \ m,'〔/〕= /〔:〕/〔7〕9,假设/⑷最高角频率为那么对 4 2取样,其频谱不混迭的最大间隔是 -------------- ,©max 3%10.假设离散系统的单位脉冲响应力〔幻=[〔-1〕1+〔-°5〕11£〔口,那么描述该系统的差分方程为 y 〔k 〕 + 1.5y 〔k -1〕 + 0.5y 〔k -2〕 = -3/〔幻一 2.5/〔攵-1〕二、计算题〔共50分,每题10分〕1 ./⑴的波形如图A-1所示,令. A/‘⑺图A-1试计算输入为-*〕 = 23〔%〕 + £代〕时,系统的零状态响应〕膜〕,“、sin 4/5.连续信号 t 的频谱 -------------------------------- /(〃?) =咫8(&)= < 4,囱<40,网>47. 己知一离散时间LTI 系统的单位阶跃响应计算该系统单位脉冲响应⑴用仪/〕和k 〕表示/⑷:〔2〕画出了〔一2,-4〕的波形.⑵将〃一2,-4〕改成/[-2« + 2〕],先压缩,再翻转,最后左移2,即得/〔一2,-4〕,如图A-8所示.八〔一〕“£〔4NL \\( 一)£(& —1)2.某线性时不变(LTD离散时间系统,当输入为演“一1)时,系统地零状态响应为2 试计算输入为/(%)= W) +仪外时,系统的零状态响应,3.信号/«)的频谱如图A-2所示,求该信号的时域表示式.-----------7}- ................. co 0F -5, 4 5 6图A-2由于系统函数为H(jco) = [g2(a)+5)+ g2(co-5)]e~j2a由于g2(')= 2Sa(.),由傅立叶变换的对称性可得:254“)= 2咫2(-助=2处23) 即— Sa(t)<^>g2(co)由调制性质,有2— Sa(t}cos5t <=> g)(3 + 5) + g)(少一5)71由时移性质,有2—Sa(t - 2)cos5(r - 2) o [g, 3 + 5) + g, (.- 5)k“"7T -因此2h(t) = — Sa(t - 2)cos5(r- 2)4.一连续时间系统的频响特性如图A-3所示,输入信号/⑷= 5 + 3cos2f+cos4/,—8</vs,试求该系统的稳态响应)'")▲〞(为)图A-34.利用余弦信号作用在系统的零状态响应的特点,即T{ cos^jZ +.)} = )| cos(卬 + 或4) +.)在此题中,火G)=0,因此由上式可以求出信号/⑺作用在系统上的稳态响应为T[f(t)] = 5H(jO) + 3H(J2)cos2r + //(J4)cos4r = 5 + 2cos2r -oo vs5.信号f⑴=£“)- - 1)通过一LTI系统的零状态响应为)*)=演/ +1) - -1),试求图A-4所示信号g(f)通过该系统的响应人〞)并画出其波形.. g0)—乙--- «--------- ►/T| i图A-45.由于以""[如'")’",所以,利用线性时不变系统的积分特性,可得y R (0 = L y(r)dr = £x[J(r + 1) +J(r-l)Jr] = s[t + 1) + s{t-\) 其波形如图A-9所示.JLfe i图A-9三、综合计算题(共20分,每题10分)1.描述一线性时不变因果连续时间系统的微分方程为y〞⑺ + 5/(0 + 6y(r) = 2/f) + f(t)f⑴=e-■),y(°-)=i,y's=1由s域求解:(1)零输入响应)'X⑺零状态响应力"),完全响应)*):(2)系统函数“(S),单位冲激响应〃“),并判断系统是否稳定:(3)画出系统的直接模拟框图(1)由于H,(jco) = --[g2(co-3)-g2(co+3)] + [3(c()-2)-3(co+2)],Sa(r) = g)(0)又由于江-,由调制定理,可得—Sa(t) sin(30 =上[g?(口—3) —取(切 + 3)]7t 2j即一/‘Sa(f)sin(3f) =-!火2(口一3)-心(3 + 3)]乃2由于sin(2r) = —2) —5(3+2)],即■/ sin(2f) o 6(3 - 2)- 6(少 + 2)7t由频域微分性质,可知:-所以有■—jth(t) = [5i/(/)sin(3r) - sin ⑵)]万,整理得1 3 2h(t) = —[Sa(t)sin(3t) -sin(20] = —Sa(t)Sa(3t) --Sa(2t)70 71 71(2)由于“行⑼是一个带通滤波器,下限角频率为2rad/s,上限角频率为4rad/s,因此,只有角频率为3rad/s 请浏览后下载,资料供参考,期待您的好评与关注!的信号分量可以通过该滤波器.由cos (卬)->\H (凡)|cos[^r +旗例)]可知O.4cos0/) . 0.4|H(j3)|cosPr + 旗 3)]由于口(万)|=.5,奴3) = 0,所以有:0.4cos@)f 0.2cos@),即 /'(,) = 1 + 0.6cosr + 0.4cos3r + 0.2cos5r —> y(f) =0.2cos(3r)2.在图A-5所示的系统中,周期信号P (')是一个宽度为7)的周期矩形脉冲串,信号/⑺的频谱为 F(js) , (1)计算周期信号p«)的频谱工;⑵计算〃⑺的频谱率密度〃03): ⑶求出信号/p ⑺的频谱表达式心口⑸(4)假设信号/⑺的最高频率°%为了使乙频谱不混迭,T 最大可取多大?图A-51)利用傅立叶级数的计算公式可得到周期信号PQ )的频谱/为⑵周期信号〃“)的指数函数形式的傅立叶级数展开式为〃⑺=z 产、〃=7C 1 \ ^ /对其进行Fourier 变换即得〃⑴的频谱密度尸㈠⑼为P(/3) = 1Sag 算卜0_〃4)⑶由于/p") = /(')〃"),利用傅立叶变换的乘积特性,可得I8 讯5(/3) = 丁/(1&)*= Z 〒Sa(4)从信号(⑺的频谱表达式G 〞5可以看出,当4之29〃时,0".)频谱不混迭,即P")1 T/2 [ r/2 1-7721 -r/2AT(-jna )^e2万一初%r=r/2 r="r/2Cz Mo =7tA sin(〃g"2) _ M | T 〃g"2 T ’一9)长沙理工大学拟题纸课程编号 5拟题教研室(或老师)签名 教研室主任签名符号说明:sgn(f)为符号函数,仇,)为单位冲击信号,/幻为单位脉冲序列,仪,)为单位阶跃信号,式k)为 单位阶跃序列.一、填空(共30分,每题3分)1.[4/)一£«-2)15(2/ -2) =./.—4/ - 2)卜 6(2/ - 2) = [£(/)-^(r-2)]-l J(r-l) = l一 1)222 .假设某离散时间EH 系统的单位脉冲响应出6={2』,3},鼓励信号/(幻={1,-2],2},那么该系统的零状态响应/(")*〃/)= ----------- c 利用排表法可得 /(%)*〃(2) = {2,-33-1,5,6}3 .连续时间信号/«)= sin«)的周期丁.= ------------- .假设对/⑺以人=1%进行抽样,所得离散序列八幻二 ------- ,该离散序列是否是周期序列 ---------- o7(A )= /“)|07=sink .不是4 .对连续时间信号延迟%的延迟器的单位冲激响应为6"一,.), ---------------- 积分器的单位冲激响应为£“) -------,微分器的单位冲激响应为 ---------- o £«)“(j ⑼=1 + W5 .一连续时间LTI 系统的频响特性I% 该系统的幅频特性= ---------------------- 相频特性 ---------------- 是否是无失真的传输系统 ----------- .不是〞(/0) = /arctan 助= 1 .(⑼=2OTCtan ⑻f (―)2^ =6 .根据Parseval 能量守恒定律,计算人.0 t ------------------------ 0力=5 ji 咫 2(助|"刃=;!/43=乃7.一连续时间LTI 系统得单位冲激响应为〃“),该系统为BIBO (有界输入有界输出)稳定系统的充要]>(琲〃条件是 ------- .-8,信号/⑺的最高频率为e (m‘〃s ),信号/2«)的最高频率是 -------------------- ©)%(女) 9 .某连续时不变(LTI)离散时间系统,假设该系统的单位阶跃响应为4h(k) = g(k)-g(k-\) = [^\ 响应为141V4;10--------------------------------------------------------------------------------------------- .连续时间信号/(')= sin42(f) + w(f_//2)],其微分/'«)= ------------------------_ 2a )m (rad/s) 0 .,那么该系统的单位脉冲£(1)H(Z )= ——————r、(1)将系统函数改写为 l + 3z"+2z-+Z 、,由此可画出系统的直接型模拟框图,如图A-10所示.4 .连续时间LTI 因果系统工程微分方程为y 〞⑺- 5),⑺ + 6y(t) = /(r) + 4/f >.输入 /⑴=,初始状态 N°-)= L y'(O-)= 3.(1)利用单边拉式变换的微分特性将微分方程转换为S 域代数方程.(2)由s 域代数方程求系统的零输入响应入⑴和零状态响应>'/⑴o 4、(1)对微分方程两边做单边拉斯变换即得s 域代数方程为 S 2Y(S ) - sy(O-) - y'(0~)- 5sY(s)-5y(O-) + 67(5)= (4s + 1)F(J ) (2)整理上述方程可得系统完全响应得s 域表达式为其中零输入响应的s 域表达式为v/、 s —21匕⑸二7^7r 三取拉斯反变换可得取拉斯反变换可得4«) = ( —卜一+一3/一%斗⑺5 .连续系统的系统函数"(S )的零极点如图A-3所示,且"(8)= 2.图A-3(1)写出〃(s )的表达式,计算该系统的单位冲激响应〃“); (2)计算该系统的单位阶跃响应g (').5、(1)由零极点分布图及“(8)的值可得出系统函数〞(s)为请浏览后下载,资料供参考,期待您的好评与关注!丫(S )= 盯(0-) + ),(.-)一53,(0-)4s+ 1 s 2+55 + 6+ 1—5S + 6 F(s) 零状态响应的s 域表达式为'($)= zT s — 5s + 6F(s) =45 + 1-1/4 -3 13/4 ------ + -------+ -------(S — 2)($ —3)(5— 1) 5 + 1 5-2 5-3“⑸〞—=3)=2 + 3 + 二^(5+ 1)(5+ 3) (5+ 1)(5+ 3)5 + 1 5 + 3取拉斯反变换可得h ⑴=26(,) + (31 -15/')£«)(2)单位阶跃响应的s 域表达式为取拉斯反变换可得g") = (- 3e-‘ +5e -"立⑺三、综合计算题(共20分,每题10分)1. 一离散时间LTI 因果系统的差分方程为y (外 + 3y(k -1) + 2y(k -2) = 2f(k)+f(k-l)系统的初始状态= 1/2M —2) = 1/4,愉入/(攵)=式k) o(1)由z 域求系统的零输入响应为(幻和零状态响应丁/公. (2)求该系统的系统函数"(Z ),并判断系统是否稳定. 1、(1)对差分方程两边进行z 变换得y (z) + 3[/y (z) + y(-D] + 2[z-2y(Z) + z\(—l) + y(-2)] = (2 + z 〞"⑵ 整理后可得二 ='—〉-2)+ _ 甲1 + 3Z "+2Z -21 + 3二+2「零输入响应的z 域表达式为_3y(-l)-2/y(-1)-2y(-2) __2_/ = ] -3 * '1 + 3]+2z"1 + 37+2Z -2 \ + zT 1 + 2/取z 反变换可得系统零输入响应为y x U)= 1(-1/-3(-2/kU)零状态响应的Z 域表达式为(2 + z"Q) 2 + ' —1/2 2 1/2/ (7) = --------------------------------- = ----------------------------------------------- = --------------- + ---------------- + -----------71 + 3/ +2z- (1 + 3] +2Z -2)(1 — Z T) 1 — Z T 1 + 2/ 「才取z 反变换可得系统零状态响应为V (幻=[一? 一1» + 2(-2) J f 仪幻〃⑵=四=,(2)根据系统函数的定义,可得 /口)l + 3z +2z-由于系统的极点为芍=-1,Z2 =-2,均不在单位圆内,故系统不稳定2.某高通的幅频特性和响频特性如图A-4所示,其中@=80万------ >3-.269一阳图A-4⑴计算该系统的单位冲激响应""):G(S ) = H(s)LT[e(t)] =25(5-2) 1 (5+ 1)(5 +3) S 一3 5--- + ----- 5+1 5+3CD(2)假设输入信号/«)= 1 + 0・58$60加+ 0.2.05120",求该系统的稳态响应丫02、(1)由于系统的频率特性为:"C/&)=U-g2&3)k-s.又由于co咐=1, r阚)""),所以,有h} (0 = J(/)-" Sa(a)c t) = d(t)一80S.80 加)乃由时移性质得/?(,) = h} (t — t()) = 3(,一八))一805380%(7-%)](2)由于高通系统的截频为80%,信号/(,)只有角频率大于80万的频率分量才能通过,故y(t) = 0.2cosl20^(r-r())长沙理工大学拟题纸课程编号6 拟题教研室(或老师)签名教研室主任签名符号说明:sgn(f)为符号函数,须,)为单位冲击信号,演幻为单位脉冲序列,£«)为单位阶跃信号,式卜)为单位阶跃序列.一、填空(共30分,每题3分)I J: « - 3)3(—2/ + 4卜〃 =(f — 3)6(/ — 2)力=万(f - 3)| 1=2= -0.5[;(1-3)6(-2/ + 4)力6/八EV , \ £>/ \ . -V/ \ 〉'(,)=-[/(,)+ J(T)12.实信号/«)的傅立叶变换/OM = H3)+ K3),信号, 2 的傅立叶变换3为---------------- .H(5)= —3.某连续时间系统的系统函数为s + 1,该系统属于------------- 类型.低通4.如以下图A-1所示周期信号/«),其直流分量= ------------- ,4图A-1X 上任+ 1, ^>0!>(〃)y^hi=L .八=伏+1)5(幻5.序列和= ---------------------由于I., .6. LTI离散系统稳定的充要条件是----------- .“(Z)的全部极点在单位圆内.7.信号/⑺的最高频率」.(及),对信号〃〃2)取样时,其频率不混迭的最大取样间隔T 1 11 = ----------- = ----»nr, max .1max= ------------- o 'max 为max ©8.一连续系统在输入/⑺作用下的零状态响应〉"〕=/'〔4,〕,那么该系统为 ---------------- 系统〔线性时变性〕.线性时变9.假设/⑺最高角频率为9",那么对〕"〕一、"了〕"5〕取样,其频谱不混迭的最大间隔是------------ .T 万44= ------------ =T—* 3绦/⑵= ---------- ----------10./〔*〕的Z变换屋+ ]〕屋+ 2〕,尸⑵得收敛域为H>max〔Z],Z2〕= 2时,/⑹是因果序列.二、计算题〔共50分,每题10分〕1.某线性时不变连续时间系统的单位冲激响应川,〕和输入/⑺如图A-2所示,从时域求解该系统的零状态响应〕*〕.1、系统的零状态响应y«〕=%〕*、〔>如图A-4所示, 刈xp1 2 3图A-42.系统y'«〕+2y⑴=/«〕的完全响应为M + 3应.2、对微分方程取拉斯变换得sy〔s〕-y〔0-〕 + 2y 〔s〕 = F 整理得r〔5〕=2122+_Lr〔5 5 + 2 5 + 2因此有匕"〕=吗匕⑸」s + 2 , s +取拉斯反变换,得零输入响应为工〔力='〔.-〕6-4£.〕由给定的系统全响应可知,鼓励信号应为:fdd〕,因此,求系统的零输入响应和零状态响⑸〕严s〕其拉斯变换为图A-2"S 户占,因而有y f (t) = (ke t -ke 2t )e(t)因此.系统的全响应为y(t) = [ke-1 + NO"-,- 2 ]£«)+ 3二小⑴比拟,可得:k = 2, ),(.一)= 5 y x (t) = y(0')e^£(t) = 5e^£(t)系统的零状态响应为>7 (0 =叱-心把⑺=2(e-l - e-2f )s(t)i N-1*]=—Z/k —川3.N=5点滑动平均系统的输入输出关系为N“.,求系统的单位脉冲响应,并判断系统是否因果、稳定.3.根据系统的单位脉冲响应的定义,当系统的输入信号/(外为单位脉冲序列演幻时,其输出y (幻就是系统 的单位脉冲响应力依),即1 N-l 1 1h*) = — >5(k — n) = 一[6(= + d(k -1) + 5(k - 2) + d(k -3) + 5[k -4)]= 一国Z)-式k - 5)]NM 5 5由于 〃(%)满足 h(k) = 0,k <.£|力冈1=41=1 j- J 氏一0所以系统是因果、稳定的.H ⑸=———— -----------4.连续时间系统的系统函数1 + 2s- + 3s +1 ,写出其状态方程和输出方程°4.根据系统函数画出系统的模拟框图,并选择积分器的输出作为状态变量,如图A-5所示,围绕模拟框图输入 端的加法器可得到状态方程为图A-5吊(1)=々«),左⑺二七⑷,£3.)= _3.)_2勺.)_3七") + /«)围绕模拟框图输出端的加法器可得到输出方程为〉'“)=$⑺+9〞)5.在图A-3所示的系统中,周期信号〃⑺是一个宽度为1'(TV T)的周期矩形脉冲串,信号/⑺的频谱为 F(js),乙(s) =取拉斯反变换,得零状态响应为—F (5)=——-—— ........................ — 5 + 2 (s + l)(s + 2) 5 + 1 5 + 2与给定的系统全响应武')=[2,… 因此,系统的零输入响应为(1)计算周期信号p(f)的频谱工;⑵计算〃⑷的频谱率密度〃()⑼: ⑶求出信号/.⑺的频谱表达式分〞⑸(4)假设信号/⑺的最高频率为了使勺.⑹频谱不混迭,T 最大可取多大?TK 二(4)从信号(⑺的频谱表达式/"⑨可以看出,当多々2%时,色〞句频谱不混迭,即以三、综合计算题(共20分,每题10分)1.描述一线性时不变因果离散时间系统的差分方程为6y (女)一5y(k - 1) + y(k -2) = f(k)k >0/‘(%)=式k), >'(-1) =-2, y(—2) = 3,由 % 域求解:(1)零输入响应工(外零状态响应力(外,完全响应,'("): (2)系统函数“(Z ),单位冲激响应〃伏): (3)假设f*) = 2式k-D,重求⑴、(2) 1.(1)对差分方程两边进行z 变换得6y(z) — 5{/y (z) + >'(—l)} + {z-2y (z) + /N —l) + y(-2)} = F(z) 整理后可得*、5),(一1)一[-.(一1) 一),(一2), 尸⑵丫 (z) = --------------- ; --- S ------ + --------- ; ----- r6-5z +Z- 6-5z +z-请浏览后下载,资料供参考,期待您的好评与关注!〃⑺图A-35、(1)利用傅立叶级数的计算公式可得到周期信号〃⑺的频谱心为[7721 r/2F"=1J A U =1-7721 -r/2A T(—jS )C2万一初eyyr=r/2 r="r/2⑵周期信号P«)的指数函数形式的傅立叶级数展开式为XT AP3=£ 亏 Sa对其进行Fourier 变换即得〃⑴的频谱密度,(/助为X T AP(js) = 2笈Z —Sa〃=Y T⑶由于Jp ⑺= /("〃"),利用傅立叶变换的乘积特性,可得18 rA工,(加)=丁产(M*P (W )=c4 sin("g"2) _ tA T T3 — 〃%)一.)零输入响应的Z 域表示式为零状态响应的z 域表示式为取z 反变换可得系统零状态响应为系统的完全响应y ⑹=外〔幻+力*〕 = [-5〔夕+1〔乎+蛔.〔2〕根据系统函数的定义,可得取z 反变换即得系统单位冲激响应为〃〔攵〕=[;〔〕"一!〔9国外乙 乙 J J〔3〕假设/〔幻=2仪〞-1〕,那么系统的零输入响应以〔攵〕、单位冲激响应力〔口和系统函数"〔Z 〕均不变,根据线 性时不变特性,可得系统零状态响应为力伙〕=[一〔;〕1 + +1]£〔々 T 〕乙 J J系统全响应为y ⑹=X ⑹+力〔攵〕=[-沼〕氏+ R 〕>⑹+[-〔;产+杲严+ i]£d 〕 乙 乙 J J 乙 J J 2.连续时间线性时不变〔LTI 〕系统的微分器的系统函数为:Z (s) = s假设设:那么用〔2〕式代替〔1〕式中的s 来设计离散时间ED 系统的方法称之为双线性变换法.是在设计过程中须确定 的一个大于零的数.〔1〕试画出离散系统的框图.〔2〕确定离散时间系统的频率响应画出它的幅度及相位响应.2,解:〔1〕令"d 〔Z 〕为离散系统的系统函数,那么由题中给出的公式〔1〕和〔2〕得:(―T)工⑵=5y(-1) 一 zN-l) -),(-2)-13+2/ -9/2 7/36 — 5Z "+Z -26-5z" +z"取z 反变换可得系统零输入响应为o 1 7 1n 〔外=【一3〔3〕' +]〔7〕人上〔发〕丫售〕=尸⑵-1/2 1/6 1/26-5/+Z-2(6-527+1)(1-1)H(z) =1/2一 1/3F ⑺6-5Z "+Z -2। 1, 1 一六〃d (z) =因此可知该系统可由两个子系统级联构成,如图A-6 (a)所示:图A-7长沙理工大学拟题纸(7)一、填空(共30分,每题3分)1、某连续系统的零状态响应为,'(/)= 2/«)-1 ,试判断该系统特性(线性、时不变、稳定 性)-非线性、时不变、稳定系统-5(f)cos (2f)= J(r)cos(2r) = J(r)3、假设离散时间系统的单位脉冲响应为力(口={1,-1,2},那么系统在/(幻={1,2,-2,1}鼓励下的零状态响应r -/⑹*/?⑹= {1,1,27-5,2 •为.可简化为图A-6 (b):(b) 图A-6(2)由系统函数可得该系统的频率响应凡®%⑵L 出为%(*)=Ts 1 + 产 Tsq .n c. /.、 J 弓),2$皿(5)2 Q 虐—n 一n『=J- 5- = — tan(5)e -.-,彳、 J s CCS 厂外 2e - (e 2 +e -) cos (—)7 O 凡(*)= j — tan —注意Owl :时,有:Ts 2幅频特性和相频特性如图A-7 (a)、(b)所示.,Q(a)(b)4、一周期信号/⑷的周期"=2乃,其频谱为尸° =1,6 =05et=0.5e-,\ 尼=—0.2j,%=S2/ ,写出/(/)的时域表达式f(t)= £ F n e jn%, = 1 + 0.5/'*')+ 0.5V-G + 0,2je-j3^ - 0.2je j^'1 n-oo=1 + cos(gf + TT)+ 0.4cos(3gr - zr / 2)(由于 g = 24/" = 1)=1 + cos(f + 4)+ OAcosQt - /z7 2) = 1 -cos(Z) + 0.4siii(3r)nv .、2+〃y. F〔JCD〕= ------- ----------5、信号/«〕= e cos〔100f〕£〔f〕的频谱2/&〕=o100?+4-b6、连续系统与离散系统的重要区别特点是,离散系统的频谱具有周期性:7、设连续时间信号/⑺的傅立叶变换为产".〕,那么尸〔"〕的傅立叶变换为.2叭-⑼.8、单位门信号gf«〕的频谱宽度一般与其门信号的宽度T有关,T越大,那么频谱宽度越窄 .9、拉普拉斯变换域傅立叶变换的根本差异是J言号满足绝对可积条件时才存在傅立叶变换:它们的关系是—而信号不满足绝对可积条件时也可能存在拉普拉斯变换:产sin co , d coJ co10、二、计算题〔共50分,每题10分〕F〔5〕=——1、s〔Je "〕,收敛域Re〔s〕>°,试求其拉氏反变换了⑴,并画出了⑺的波形.1 1 1 00।L 由于自四一 "〕= h, 〔Re⑸>.〕x 12"〕 0 r令7 = 2,得〃・. 1-6 O由傅立叶变换的时域卷积性质,有X00f ⑴=s〔t〕 * Z 5〔1 - 2"〕 =>" 2〃〕〃-. 〃i〕,其波形如图A-6所示.⑴系统的单位冲激响应力〞);(2)输入 fS = 1 + 0・6cosf + 04cos3f + 0.2cos5fLs <t <s ,系统的输出 y(f). 2.解(1)由于H ,(ja )) = ~[g 2(co-3)-g 2(co+3)]+[3(cD-2)-3(co+2)]乙又由于江 -,由调制定理,可得-Sa«) sin(3r) =,■;[w (公 一 3) — 心(刃 + 3)1乃 2)一/’Sa(f)sin(3f)o -2[g2(G-3)-g2(G + 3)]2由于sin(2f) = -M33-2)-53+2)],即—sin(2r) = 6(3—2)-6(—+2) 7t由频域微分性质,可知:一"〃")0所以有一 jth(t) = -—[ Sa(t) s in(3r) - s in(2r)]万 ,整理得1 3 2h(t) = —[Sa(0 sin(3f) - sin(2z)] = — Sa(t)Sa(3t)--Sa(2t)(2)由于""⑼是一个带通滤波器,下限角频率为 的信号分量可以通过该滤波器.由 COS3J) T 〃(J4)|cos 画/ + 收.)]可知O.4cos0r) —>0.4|H(j3)|cos|3r+ ^?(3)]2、某连续LTI 时间系统得频率响应〞(/⑼如图A-1所示,试求:7t2rad/s,上限角频率为4rad/s,因此,只有角频率为3rad/s。
信号与系统课后答案第八章作业答案后半部分

频率响应为
H
(e jΩ
)
=
H
(z)
|z = e jΩ
=
4 ⎡⎣ejΩ −1⎤⎦
3
⎡⎢⎣e
jΩ
−
1 3
⎤ ⎥⎦
经计算得极点为 p = 1 ,零点为 z = 1。 3
H(e jΩ)
(Ω)
幅频响应图(横坐标进行了归一化处理)
(c)Yx (z) =
y(−1) + 2 y(−2) + 2 y(−1)z−1 1− z−1 − 2z−2
=
8⋅ z +1⋅ 3 z−2 3
z, z +1
z
>2
其逆
z
变换即零输入响应为
yx
(n)
=
8 3
⋅
2n
u(n)
+
1 3
⋅
(−1)n
u(n)
(d)根据上面计算的零输入和零状态响应可知系统的完全响应为
f (n) = (−1)n u(n) , y(−1) = 0 , y(−2) = 1;
解:(1)将原式两边取单边 Z 变换得,
Y (z) −[z−1Y (z) + y(−1)] − 2[z−2Y (z) + y(−2) + y(−1)z−1] = F (z) + z−1F (z)
整理得:
Y (z)
=
题图 8-23
根据系统框图可得 h(n) = h1(n) ∗[h2 (n) + h3 (n)] ,故 h(n) = δ (n) ∗[h2 (n) + h3(n)] = u(n) + u(n − 2)
现代控制理论第二章

第二章 控制系统状态空间表达式的解建立了控制系统状态空间表达式之后,就是讨论求解的问题,本章重点讨论状态转移矩阵的定义,性质和计算方法,从而导出状态方程的求解公式并讨论连续时间系统状态方程的离散化的问题。
§2-1线性定常齐次状态方程的解(自由解)所谓自由解是指系统输入为零时,由初始状态引起的自由运动。
状态方程为齐次矩阵微分方程:AX X= (2-1)若初始时刻0t 时的状态给定为00)(x t x =,则式(2-1)有唯一确定解。
0)(0)(x e t x t t A -=,0t t ≥(2-2)若初始时刻从0=t 开始,即0)0(x x =,则其解为:0)(x e t x At =, 0t t ≥(2-3)证:先假设式(2-1)的解)(t x 为t 的矢量幂级数形式,即:+++++=k k t b t b t b b t x 2210)((2-4)对上式求导: ++++=-1232132)(k k t kb t b t b b t x代人式(2-1)得:A x= ( +++++kk t b t b t b b 2210) (2-5)既然式(2-4)是(2-1)的解,则式(2-5)对任意时刻t 都成立,故t 的同次幂项的系数应相等,有:01Ab b =,0212!2121b A Ab b ==,0323!3131b A Ab b ==,… 01!11b A k Ab kb k k k ==-,… 在式(2-4)中,令0=t ,可得:00)0(x x b == 将以上结果代人式(2-4),故得:022)!1!211()(x t A k t A At t x k k +++++= (2-6)括号内的展开式是n n ⨯矩阵,它是一个矩阵指数函数,记为At e221112!!At k ke At A t A t K =+++++ (2-7)式(2-6)可表示为:0()At x t e x =再用)(0t t -代替)0(-t ,即在代替t 的情况下,同样证明0)(0)(x e t x t t A -=的正确性。
实验七--离散系统分析的MATLAB实现讲解学习
实验七 离散系统分析的MATLAB 实现一、实验目的1、掌握利用MATLAB 绘制系统零极点图的方法;2、掌握离散时间系统的零极点分析方法;3、学习离散系统响应的MATLAB 求解方法;4、掌握用MATALB 实现离散系统频率特性分析的方法;5、深刻理解离散系统的系统函数零极点对系统频响的影响,可以根据 零极点知识设计简单的滤波器。
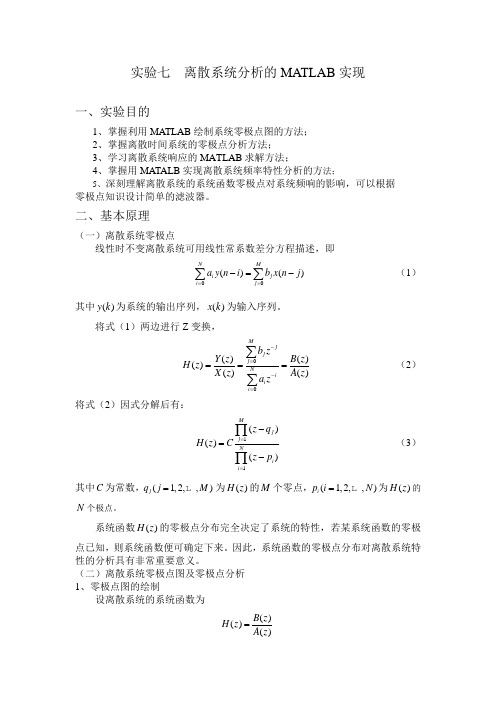
二、基本原理(一)离散系统零极点线性时不变离散系统可用线性常系数差分方程描述,即()()N Miji j a y n i b x n j ==-=-∑∑ (1)其中()y k 为系统的输出序列,()x k 为输入序列。
将式(1)两边进行Z 变换,00()()()()()Mjjj Nii i b zY z B z H z X z A z a z-=-====∑∑ (2) 将式(2)因式分解后有:11()()()Mjj Nii z q H z Cz p ==-=-∏∏ (3)其中C 为常数,(1,2,,)j q j M =L 为()H z 的M 个零点,(1,2,,)i p i N =L 为()H z 的N 个极点。
系统函数()H z 的零极点分布完全决定了系统的特性,若某系统函数的零极点已知,则系统函数便可确定下来。
因此,系统函数的零极点分布对离散系统特性的分析具有非常重要意义。
(二)离散系统零极点图及零极点分析 1、零极点图的绘制设离散系统的系统函数为()()()B z H z A z =则系统的零极点可用MATLAB 的多项式求根函数roots()来实现,调用格式为:p=roots(A) 其中A 为待求根多项式的系数构成的行矩阵,返回向量p 则是包含多项式所有根的列向量。
如多项式为231()48B z z z =++,则求该多项式根的MATLAB 命令为为:A=[1 3/4 1/8]; P=roots(A) 运行结果为: P =-0.5000 -0.2500需注意的是,在求系统函数零极点时,系统函数可能有两种形式:一种是分子、分母多项式均按z 的降幂次序排列;另一种是分子、分母多项式均按1z -的升幂次序排列。
西北工业大学考博基础理论课考试大纲--盛世清北
基础理论课考试大纲(2020)《高等电磁理论》考试大纲考试内容:Maxwell方程组,平面电磁波,复杂媒质中的电磁波,各项异性媒质,导波理论,金属波导理论,介质波导理论,谐振腔,谐振腔的微扰,电磁波的辐射与反射,口面天线理论。
参考书目:1.Fields & Waves in Communication Electronics S.Ramo & J.Whinnery John Wiley & Sons;2.导波场论 R.E.柯林著上海科学技术出版社。
3.正弦场电磁场哈林顿著上海科学技术出版社(2021)《信号检测与估计》考试大纲考试内容:1.随机信号分析平稳随机信号与非平稳随机信号,随机信号的数字特征,平稳随机过程,复随机过程,随机信号通过线性系统。
2.信号检测信号检测的基本概念,确知信号的检测(包括匹配滤波原理、高斯白噪声中已知信号检测、简单二元检测)3.信号估计信号参数(包括贝叶斯估计、最大似然估计、线性均方估计和最小二乘估计),信号波形估计(主要指卡尔曼滤波)。
参考书目:1.景占荣,羊彦,信号检测与估计,化学工业出版社 20042.赵树杰,信号检测与估计理论,西安电子科技大学出版社 2001(2022)《现代网络分析》考试大纲考试内容:1.网络元件和网络特性:二端元件的参数与性质、二端口元件、性质及六组参数、受控电源、网络特性。
2.网络图论:图的概念与定义、节点关联矩阵、回路关联矩阵、割集关联矩阵、独立变量组、非基本关联矩阵、图形的树数、求全部树、由矩阵求图。
3.网络方程:支路电流方程和支路电压方程、回路电流方程和网孔电流方程、割集电压方程和节点电位方程、混合方程、含受控源网络和理想运放器网络的节点方程。
4.网络的拓扑分析:割集方程和回路方程的拓扑解、驱动点函数的拓扑公式、传输函数的拓扑公式、含受控源网络的传输导纳、节点方程的拓扑解。
5.信号流图:信号流图基本概念、信号流图的构成方法、梅森公式、状态变换图解、线图到流图、Shannon-Happ公式、Coates公式。
MATLAB控制系统各种仿真例题(包括simulink解法)
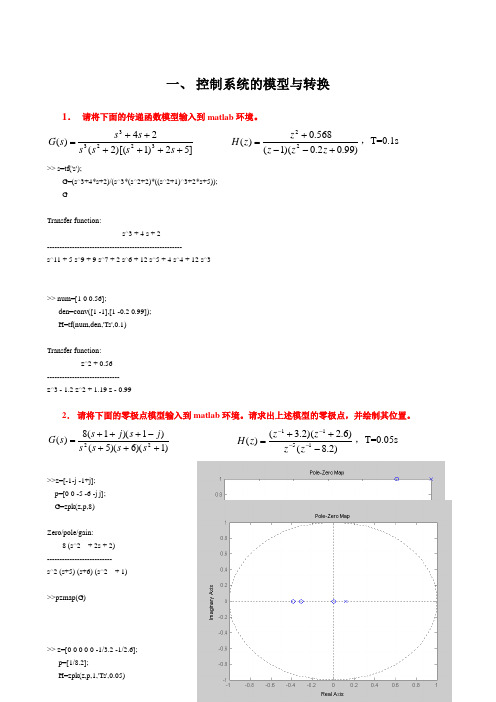
一、 控制系统的模型与转换1. 请将下面的传递函数模型输入到matlab 环境。
]52)1)[(2(24)(32233++++++=s s s s s s s G )99.02.0)(1(568.0)(22+--+=z z z z z H ,T=0.1s >> s=tf('s');G=(s^3+4*s+2)/(s^3*(s^2+2)*((s^2+1)^3+2*s+5)); GTransfer function:s^3 + 4 s + 2 ------------------------------------------------------ s^11 + 5 s^9 + 9 s^7 + 2 s^6 + 12 s^5 + 4 s^4 + 12 s^3>> num=[1 0 0.56];den=conv([1 -1],[1 -0.2 0.99]); H=tf(num,den,'Ts',0.1)Transfer function: z^2 + 0.56 ----------------------------- z^3 - 1.2 z^2 + 1.19 z - 0.992. 请将下面的零极点模型输入到matlab 环境。
请求出上述模型的零极点,并绘制其位置。
)1)(6)(5()1)(1(8)(22+++-+++=s s s s j s j s s G )2.8()6.2)(2.3()(1511-++=----z z z z z H ,T=0.05s>>z=[-1-j -1+j]; p=[0 0 -5 -6 -j j];G=zpk(z,p,8)Zero/pole/gain: 8 (s^2 + 2s + 2) -------------------------- s^2 (s+5) (s+6) (s^2 + 1)>>pzmap(G)>> z=[0 0 0 0 0 -1/3.2 -1/2.6]; p=[1/8.2];H=zpk(z,p,1,'Ts',0.05)Zero/pole/gain:z^5 (z+0.3125) (z+0.3846) ------------------------- (z-0.122)Sampling time: 0.05>>pzmap (H )二、 线性系统分析1. 请分析下面传递函数模型的稳定性。
自动控制原理第7章 离散控制系统

b(t )
H (s)
图7.5 数字控制系统的简化框图
2019/2/19
7
数字控制系统较之一般的连续控制系统具有如下一 些优点: 能够保证足够的计算精度; 在数字控制系统中可以采用高精度检测元件和执 行元件,从而提高整个系统的精度; 数字信号或脉冲信号的抗干扰性能好,可以提高 系统的抗干扰能力; 可以采用分时控制方式,提高设备的利用率,并 且可以采用不同的控制规律进行控制; 可以实现一些模拟控制器难以实现的控制律,特 别对复杂的控制过程,如自适应控制、最优控制、 智能控制等,只有数字计算机才能完成。
2019/2/19
9
7.2.1 采样过程及其数学描述
将连续信号通过采样开关(或采样器)变换成离 散信号的过程称为采样过程。相邻两次采样的时间 间隔称为采样周期T。 采样频率:f s 1/ T 采样角频率: s 2 /T 采样可分为:
等速采样:采样开关以相同的采样周期T动作,又 称为周期采样 多速采样:系统中有n个采样开关分别按不同周期 动作 随机采样:采样开关动作是随机的 本章仅限于讨论等速同步采样过程。
j t xj ( ) xt () e d t
1 X( s ) Xs ( j k s) T k
*
2019/2/19
(7-7)
15
X ( j )
max
2max
(a)
o
max
图7.7 连续信号及离散信号的频谱
式中ω s=2π/T为采样频率,X(s)为x(t)的拉氏变 换。若X*(s)的极点全都位于s左平面,可令s=jω , 求得x*(t)的傅氏变换为
离散控制系统最常见形式是数字控制系统。图 7.4是数字控制系统的结构图。图中用于控制的计算 机D工作在离散状态,被控对象G(s)工作在模拟状态。
差分方程离散系统的z域分析法稳定性
0 对 应s平面的虚轴 z平面为单位圆
j j1
1 0
S平面
0 对应s左半平面 z平面为单位圆内
0 对 应s右 半 平 面 z平 面 为 单 位 圆 外 Z平面 Im
F(s) a s( s a )
求Z变换
解: F( s ) 1 - 1
s sa
f ( t ) 1 - e-at
F(
z
)
Z[
f
(
t
)]
1 1- z-1
-
1-
1 e -aT z -1
( 1 - e-aT ( 1 - z-1 )( 1 -
)z - 1 e-aT z -1
)
(
z
( 1 - e-aT )z - 1 )( z - e-aT
15
u( t )
1
0
uh( t )
1
0T
1 0 -1
零阶保持器的传递函数:
u( t )
零阶 uh ( t )
保持器
零阶保持器的单位脉冲响应可表示 为二个单位阶跃信号的叠加。
uh( t ) 1( t ) - 1( t - T )
单位脉冲响应的拉氏变换就是零阶
保持器的传递函数。
Gh (
s
)
1 s
n0
Z反变换为 Z -1 [ F ( z )] f ( t )
18
关于Z变换的几点说明:
Z变换的无穷级数表达式与信号在采样时刻的取值一一对
应。
F ( z ) f ( nT )z-n
计算机控制系统---第三章
的z变换。
解:
另一种由F(s) 求取F(z) 的方法是留数计算方法。本书对此不予讨论
利用MATLAB软件中的符号语言工具箱进行F(s)部分 分式展开
已知
,通过部分分式展开法求F(z) 。
MATLAB程序:
F=sym(′(s+2)/(s*(s+1)^2*(s+3))′); %传递函数F(s)进行符号定义
即得到
3.4.4 干扰作用时闭环系统的输出
根据线性系统叠加定理,可分别计算指令信号和干扰信号作用下的输出响应。
G(z)
Z
1
esT s
G1(s)G2 (s)
R(s)单独作用时的 系统输出[N(s)=0]
干扰单独作用时的 系统输出[R(s)=0]
共同作用时的系 统输出
图3-13 有干扰时的计算机控制系统
图3-10采样控制系统典型结构
一般系统输出z变换可按以下公式直接给出:
C(z)
前向通道所有独立环节z变换的乘积 1闭环回路中所有独立环节z变换的乘积
3.4.3 计算机控制系统的闭环脉冲传递函 数
1. 数字部分的脉冲传递函数
控制算法,通常有以下两种形式:
差分方程
脉冲传递函数D(z)
(z变换法)
连续传递函数
2. 由脉冲传递函数求差分方程
z反变换
z反变换
3.4.1 环节串联连接的等效变换
1. 采样系统中连续部分的结构形式
并不是所有结构都能写出环节的脉冲传递函数
3.4.1 环节串联连接的等效变换
2. 串联环节的脉冲传递函数
3.4.1 环节串联连接的等效变换
3. 并联环节的脉冲传递函数
根据叠加定理有:
离散时间LTI系统的单位脉冲响应

(1) 确定h[k]的形式
特征方程为 特征根为
r 2 3r 2 0 r1 1, r2 2
h[k ] C1 (1) k C 2 (2) k , k 0
2. 单位脉冲响应的求解
离散时间LTI系统的单位脉冲响应
谢 谢
本课程所引用的一些素材为主讲老师多年的教学积累,来
源于多种媒体及同事、同行、朋友的交流,难以一一注明出处, 特此说明并表示感谢!
解:h[k]满足方程 h[k ] 3h[k 1] 2h[k 2] d [k ] (3) 确定齐次解的待定系数 代入初始条件
h[0] C1 C2 1, h[1] C1 2C2 3
C1=-1,C2= 2
h[k ] [(1) k 2(2) k ]u[k ]
h [k]
1. 单位脉冲响应的定义
若描述离散时间LTI系统的常系数线性差分方程为
a y[k i] b x[k j ]
i 0 i j 0 j
n
m
则离散时间LTI系统的单位脉冲响应h[k]应满足
i 0
n
ai h[k i] b jd [k j ]
j 0
m
2. 单位脉冲响应的求解
[例] 某离散因果LTI系统的差分方程为 y[k ] 3 y[k 1] 2 y[k 2] x[k ] 求系统的单位脉冲响应h[k]。
选择初始条件基本原则是必须将d[k]的作用体现在初始条件中 解:h[k]满足方程 h[k ] 3h[k 1] 2h[k 2] d [k ] (2) 求等效初始条件 对于因果系统有h[-1] = h[-2] = 0,代入上面方程可推出 h[0] d [0] 3h[1] 2h[2] 1
《数字信号处理》教学大纲

《数字信号处理》教学大纲一、课程概述《数字信号处理》是大学本科三年级通信工程专业本科生继《信号与系统》课程后的一门重要专业基础课。
随着计算机技术和信息科学的发展,数字信号处理技术也获得了飞速的发展。
数字信号处理已成为一门极其重要的学科和技术领域。
本课程是一门理论和实践要求都较高的课程,教学中要求采用理论推导和应用分析相结合的手段。
通过理论学习和实验使学生掌握数字信号处理的基本原理和方法,初步培养学生能够从数学概念、物理概念及工程概念去分析问题和解决实际问题的能力,采用数字的数值计算方法(软件实现和硬件实现)处理以达到提取信息和便于应用的目的,为深入学习本专业有关课程及为以后从事专业工作打下良好的基础。
二、课程目标1.了解信号处理技术的发展趋势,以及信号处理在现代通信系统中的位置和作用。
2.通过学习掌握数字信号处理的基础理论:信号的基本运算、傅氏分析和Z变换等;3.熟练掌握是数字滤波器的基本理论和设计方法:IIR数字滤波器、FIR滤波器的基本理论和设计方法;4.初步掌握是数字信号处理的技术实现:软、硬件实现方法;三、课程内容和教学要求这门学科的知识与技能要求分为知道、理解、掌握、学会四个层次。
这四个层次的一般涵义表述如下:知道:是指对这门学科和教学现象的认知。
理解:是指对这门学科涉及到的概念、原理、策略与技术的说明和解释,能提示所涉及到的教学现象演变过程的特征、形成原因以及教学要素之间的相互关系。
掌握:是指运用已理解的教学概念和原理说明、解释、类推同类教学事件和现象,并能够用所学的内容分析、初步设计和解答与实际应用相关的问题学会:是指能模仿或在教师指导下独立地完成某些教学知识和技能的操作任务,或能识别操作中的一般差错。
教学内容和要求表中的“√”号表示教学知识和技能的教学要求层次。
教学内容及教学要求表四、课程实施(一)课时安排与教学建议数字信号处理是计算机通信工程专业本科生必修课程,系主干课程。
可以安排72学时,也可以安排54学时,具体安排如下:课时安排与教学方法表(二)教学组织形式与教学方法要求1. 打破传统的教学模式,注意教学方法的灵活性,建立多种教学媒体综合运用的运行机制,逐步建立适合学生个别化自主学习的支持服务体系和质量保证体系。
现代控制理论课后习题答案
绪论为了帮助大家在期末复习中能更全面地掌握书中知识点,并且在以后参加考研考博考试直到工作中,为大家提供一个理论参考依据,我们11级自动化二班的同学们在王整风教授的带领下合力编写了这本《现代控制理论习题集》(刘豹第三版),希望大家好好利用这本辅助工具。
根据老师要求,本次任务分组化,责任到个人。
我们班整体分为五大组,每组负责整理一章习题,每个人的任务由组长具体分配,一个人大概分1~2道题,每个人任务虽然不算多,但也给同学们提出了要求:1.写清题号,抄题,画图(用CAD或word画)。
2.题解详略得当,老师要求的步骤必须写上。
3.遇到一题多解,要尽量写出多种方法。
本习题集贯穿全书,为大家展示了控制理论的基础、性质和控制一个动态系统的四个基本步骤,即建模、系统辨识、信号处理、综合控制输入。
我们紧贴原课本,强调运用统一、联系的方法分析处理每一道题,将各章节的知识点都有机地整合在一起,力争做到了对控制理论概念阐述明确,给每道题的解析赋予了较强的物理概念及工程背景。
在课后题中出现的本章节重难点部分,我们加上了必要的文字和图例说明,让读者感觉每一题都思路清晰,简单明了,由于我们给习题配以多种解法,更有助于发散大家的思维,做到举一反三!这本书是由11级自动化二班《现代控制理论》授课老师王整风教授全程监管,魏琳琳同学负责分组和发布任务书,由五个小组组组长李卓钰、程俊辉、林玉松、王亚楠、张宝峰负责自己章节的初步审核,然后汇总到胡玉皓同学那里,并由他做最后的总审核工作,绪论是段培龙同学和付博同学共同编写的。
本书耗时两周,在同学的共同努力下完成,是二班大家庭里又一份智慧和努力的结晶,望大家能够合理使用,如发现错误请及时通知,欢迎大家的批评指正!2014年6月2日第一章 控制系统的状态空间表达式1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
数字信号处理实验指导书
《数字信号处理》实验指导书编写:刘梦亭审核:司玉娟阎维和适用专业:电子信息工程电子信息科学与技术通信工程等电子信息与工程系2009年9月目录实验一:离散时间信号分析 (1)实验二:离散时间系统分析 (3)实验三:离散系统的Z域分析 (6)实验四:FFT频谱分析及应用 (9)实验五:IIR数字滤波器的设计 (12)实验六:FIR数字滤波器的设计 (16)附录: MATLAB基本操作及常用命令 (20)实验一:离散时间信号分析实验学时:2学时 实验类型:验证 实验要求:必修 一、实验目的1) 掌握离散卷积计算方法; 2) 学会差分方程的迭代解法;3) 了解全响应、零输入响应、零状态响应和初始状态的物理意义和具体求法; 二、实验内容 1、信号的加数学描述 )()()(21n x n x n x += MATLAB 实现 21X X X +=设[ x10=[1 0.7 0.4 0.1 0]; x20=[0.1 0.3 0.5 0.7 0.9 1];]2、信号的乘数学描述 )()()(21n x n x n x *= MATLAB 实现 2.1X X X *=设[ x10=[1 0.7 0.4 0.1 0]; x20=[0.1 0.3 0.5 0.7 0.9 1];]3、计算卷积用MATLAB 计算序列{-2 0 1 –1 3}和序列{1 2 0 -1}的离散卷积。
首先用手工计算,然后用MATLAB 编程验证。
三、实验组织运行要求1、学生在进行实验前必须进行充分的预习,熟悉实验内容;2、学生根据实验要求,读懂并理解相应的程序;3、学生严格遵守实验室的各项规章制度,注意人身和设备安全,配合和服从实验室人员管理;4、教师在学生实验过程中予以必要的辅导,独立完成实验;5、采用集中授课形式。
四、实验条件1、具有WINDOWS 98/2000/NT/XP 操作系统的计算机一台; 2.、MATLAB 编程软件。
2-3脉冲响应及离散系统

0
0
C eAtest d tB D
(48)
0
而 A eAtest d t AeAtest d t I s eAtest d t
0
0
0
上式可改写成 [sI A] eAtest dt I 0
(49)
如果sI A1存在,则 eAtest d t [sI A]1 0
2)传递性
(k2 ) (k2 k1)(k1)
3)可逆性 1(k) (k)
2. 状态转移矩阵的计算
有4种状态转移矩阵的计算方法:①按定义计算;②用z反变换 计算;③应用凯-哈定理计算;④通过线性变换计算。
在此,我们仅讨论用z反变换计算。
离散系统的齐次状态方程为:
x(k 1) Gx(k)
对上式进行 z 变换 zx(z) zx(0) Gx(z)
其中
(k) Gk
系统的输出为 y(k) CGk x(0)
(65)
(66) (67)
2.7.2 状态转移矩阵
若系统初始状态为 x(0),通过(k) Gk 将其转移到状态 x(k),故(k) 称为状态转移矩阵。
1. (k) 的基本性质
1)满足自身的矩阵差分方程及初始条件
(k 1) G(k) (0) I
如果输入向量表示为
t
u(t) u(τ)δ(t τ)d τ t0
(53)
将(53)式代入(28)式
y(t) C eA(tt0 )
x(t0 ) C
et A(tτ )
t0
Bu(τ) d τ D
t t0
u(τ)δ(t τ)d τ
C eA(tt0 ) x(t0 )
t t0
[C eA(tτ) B Dδ(t τ)]u(τ) d τ
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2)传递性
(k2 ) (k2 k1 ) (k1 )
3)可逆性
1 (k ) (k )
2. 状态转移矩阵的计算
有4种状态转移矩阵的计算方法:①按定义计算;②用z反变换 计算;③应用凯-哈定理计算;④通过线性变换计算。 在此,我们仅讨论用z反变换计算。 离散系统的齐次状态方程为: 对上式进行 z 变换
k 0 k 1 k2
(69)
x(1) Gx(0) Hu(0) x(2) Gx(1) Hu(1) G 2 x(0) GHu(0) Hu(1)
x(3) Gx(2) Hu(2) G3 x(0) G 2 Hu(0) GHu(1) Hu(2)
k k 1 x (k ) Gx(k 1) Hu(k 1) G x (0) G k i 1 Hu(i)
0
(48)
而
A
0
0
e e dt
At st
Ae e d t I s
At st 0
0
e At est d t
上式可改写成
1
[sI A]
e At est d t I
(49)
(50) (51) (52)
如果 sI A 存在,则
0
e At est d t [sI A]1
u(t ) u(τ )δ(t τ ) d τ
t0
t
(53)
将(53)式代入(28)式
y(t ) C e Ce
A(t t0 ) A( t t0 )
x(t0 ) C e
t0 t t0 t
t
A(t τ )
Bu(τ ) d τ D u(τ )δ(t τ ) d τ
D(t )e1 D(t )e2 D(t )er δ(t τ ) C (t ) (t , τ ) B(τ ) D(τ )δ(t τ )
线性时变系统脉冲响应矩阵
(44)
C (t ) (t , τ ) B(τ ) D(τ )δ(t τ ) H (t , τ ) 0
k 0 x(1) Gx(0) k 1 x(2) Gx(1) G 2 x(0) k 2 x(3) Gx(2) G 3 x(0)
k k 1 x(k ) Gx(k 1) G k x(0) (k ) x(0)
其中 系统的输出为
(k ) G k
0
kT
x[(k 1)T ] [(k 1)T , kT ] x(kT )
令: G(kT ) [(k 1)T , kT ]
( k 1)T
kT
[(k 1)T , τ ]B(τ )u(τ ) d τ
( k 1)T kT
H (kT )
[(k 1)T , τ ]B(τ )u(τ ) d τ
y(k ) CG k x(0)
(66) (67)
2.7.2 状态转移矩阵
(k ) G k 将其转移到状态 x (k ),故 (k ) 若系统初始状态为 x (0) ,通过
称为状态转移矩阵。 1. (k ) 的基本性质
1)满足自身的矩阵差分方程及初始条件
(k 1) G (k )
2.5.1 线性时变系统的脉冲响应矩阵
第i 个分量
yi (t ) C (t ) (t, τ )B(τ )ei δ(t τ ) d τ D(t )ei δ(t τ )
C (t ) (t , τ ) B(τ )ei D(t )ei δ(t τ ) ≜ hi (t , τ )
t0
t
(43)
hi (t )为m维向量,它表示系统输出 y(t )对输入u(t ) 的第i个元素 在τ时刻加入单位脉冲时的响应。 i 将 hi (t ), 1,2,, r 按次序排列,则
H (t , τ ) h1 (t , τ ) h2 (t , τ ) hr (t , τ )
C (t ) (t , τ ) B(τ )e1 C (t ) (t , τ ) B(τ )e2 C (t ) (t , τ ) B(τ )er
(k ) G k Z
{[ zI G]1 z}
(68)
例2-13 离散系统齐次状态方程为 x(k 1) 0
求状态转移矩阵
8 / 13 5 / 13 1 z 0.8 z 0.5 z 1 [ zI A] 4 / 13 4 / 13 0.4 z 0.3 z 0.8 z 0.5
t≥ τ
t τ
(47)
2.5.3 传递函数矩阵与脉冲响应矩阵之间的关系 对(47)式求拉普拉斯变换 st At st H (s) L [ H (t )] H (t ) e d t [C e B Dδ(t )]e d t 0 0
C
e At est d tB D
t0
t
x(t0 ) [C e A(t τ ) B Dδ(t τ )]u(τ ) d τ
(54)
t0
C e A(t t0 ) x(t0 ) H (t τ )u(τ ) d τ
当系统初始状态为零时
y(t ) H (t τ )u(τ ) d τ
t0
t
(55)
系统方程为
x(k 1) G(k ) x(k ) H (k )u(k ) y(k ) C (k ) x(k ) D(k )u(k )
(72)
若系统的解存在且唯一,则解为
x(k ) (k , k0 ) x(k0 ) (k , i 1) H (i)u(i)
i k0
程序执行结果
这表示
2 e t e 2t e t e 2t (t ) t 2t t 2t e 2e 2 e 2 e 2 e t e 2t x (t ) t 2t 2 e 2 e
将(50)式代入(48),得到 H (s) C[sI A]1 B D G(s) 当D = 0 时
H (s) C[sI A]1 B G(s)
可见,线性定常系统在初始松弛情况下脉冲响应矩阵的拉普拉斯 变换就是系统传递函数矩阵。
2.5.4 利用脉冲响应矩阵计算系统的输出
如果输入向量表示为
x(k 1) Gx(k )
zx( z) zx(0) Gx( z) [ zI G] x( z ) zx(0) x( z) [ zI G]1 zx(0)
x (k ) Z
可见
1
{[ zI G]1 z}x(0) (k ) x(0) G k x(0)
1
考虑到 u(τ ) u(kT ) τ [kT , (k 1)T ]
于是
x[(k 1)T ] G(kT ) x(kT ) H (kT )u(kT ) x(k 1) G(k ) x(k ) H (k )u(k )
省略T,得到
(61)
输出方程离散化,令 t kT ,即可以得到
x(kT ) (kT , k0T ) x(t0 ) (kT , τ )B(τ )u(τ ) d τ
k0T
kT
(59)
将(59)式两边都左乘 [(k 1)T , kT ]
[(k 1)T , kT ] x(kT ) [(k 1)T , k0T ] x(k0T ) [(k 1)T , τ ]B(τ )u(τ ) d τ kT (60) (58)减(60)并且整理后,得到
2.6 线性连续系统方程的离散化
作以下假定: 1)被控对象上有采样开关; 2)采样周期为T,满足香农采样定理要求,包含连续信号全 部信息;
3)具有零阶保持器。
2.6.1 线性时变系统 x A(t ) x B(t )u y C (t ) x D(t )u 初始状态为 x (t0 ) 状态方程的解为 t x(t ) (t , t0 ) x(t0 ) (t , τ )B(τ )u(τ ) d τ
其中 G e
AT
T e Aτ d τ B H 0
C C
DD
2.7 线性离散系统的运动分析
2.7.1 线性定常离散系统齐次状态方程的解
系统的齐次状态方程为:
x(k 1) Gx(k )
(65)
其中,x(k)为n维状态向量 采用迭代法可以求出系统齐次状态方程的解
1
1 x (k ) 0.4 0.3
10 / 13 10 / 13 z 0.8 z 0.5 8 / 13 5 / 13 z 0.8 z 0.5
解
(k ) G k Z
1
{[ zI G]1 z}
10 10 k (0.8) (0.5) k 13 13 8 5 k k (0.8) (0.5) 13 13
y(k ) C (k ) x(k ) D(k )u(k )
(62)
2.6.2 线性定常系统
x Ax Bu y Cx Du
离散化后得到
(63)
x (k 1) Gx(k ) Hu(k ) y(k ) Cx (k ) Du(k )
(64)
k 1
(73)
(用迭代法可以证明) 系统的输出为
k 1
y(k ) C (k ) (k , k0 ) x(k0 ) C (k ) (k , i 1) H (i)u(i) D(k )u(k )
i k0
(74)
2.8 用MATLAB求解系统方程
2.8.1 线性齐次状态方程的解 使用MATLAB可以方便地求出状态方程的解。我们通过例 子来说明。 例2-16 已知线性系统齐次状态方程为