EPSON软件基本操作及培训
爱普生培训资料:创建程序
还有复制和重命名项目的功能,因此很容易从以前的版本中创建新项目并将项目备 份到外部介质,如 USB 存储钥匙。
EPSON RC+ 7.0 项目的组成
每个项目都存储在\EpsonRC70\Projects 目录中。
以下段落描述了项目的组成。
211
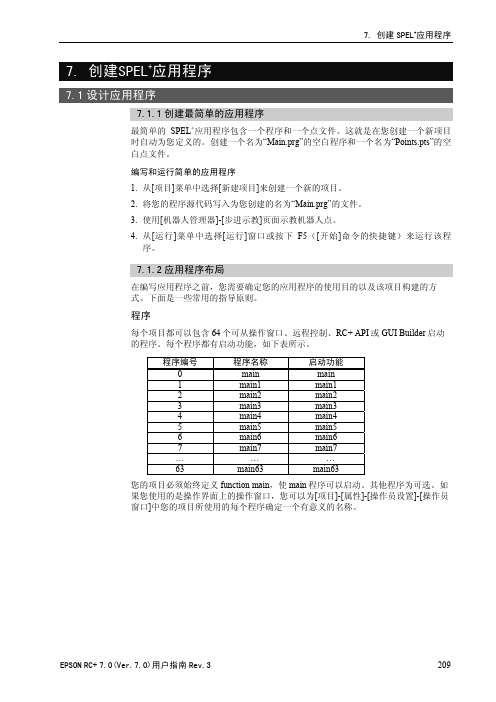
7. 创建 SPEL+应用程序
7.2 管理项目
7.2.1 概述
EPSON RC+ 7.0 项目是什么?
EPSON RC+ 7.0 项目是 SPEL+程序文件的集合,包含文件、机器人点文件、I/O 标 签、用户错误、视觉设置及传送带设置,用于运行 SPEL+应用程序。
为什么需要这些项目?
项目是管理 SPEL+应用程序的安全简便之法。每个应用程序的所有信息都存放在一 个项目中。将所有的应用程序代码和点定义放在一个项目中,这样很容易就能打开 一个项目并开始运行或编辑。此外,很容易创建应用程序的新版本并运行旧的版 本。
若要使用操作窗口让程序启动和停止,控制装置必须从[设置]-[设置控制器]-[控制 器]-[配置]中设置设为 Self。 有 关 配 置 EPSON RC+ 7.0 自 动 启 动 的 详 细 信 息 , 请 参 见 操 作 一 章 中 的 “ 启 动 模式 ”。
远程控制 使用远程控制打开/关闭电机,将机器人返回起始点,启动程序等。可以用一个简单 的按钮盒或可以连接 PLC。 使用远程控制时,控制装置必须在[设置]-[设置控制器]-[SPEL 控制器板]-[配置]中设 置为远程。
使用RC+ API的Windows应用程序 使用 RC+ API 选项以及 Windows 开发工具,如 Visual Basic、Visual C#或 Visual C++。更多信息,请参阅 RC+ API 手册。
爱普生培训资料:创建程序
EPSON RC+ 7.0(Ver.7.0)用户指南 Rev.3
209
7. 创建 SPEL+应用程序
操作界面
操作窗口 使用与 EPSON RC+ 7.0 一起提供的操作窗口。您可以配置 EPSON RC+ 7.0,这样在 Windows 启动后,EPSON RC+ 7.0 将以自动模式启动,其会自动打开操作窗口。 操作员可以选择 64 个程序。也可以选择使用“暂停/继续”按钮、I/O 监视器、机器人 管理器和系统历史查看器。
210
EPSON RC+ 7.0(Ver.7.0)用户指南 Rev.3
7. 创建 SPEL+应用程序
7.1.3 开机时自动启动
您的应用程序可以 Windows 用户自动登录并在 Windows 启动后启动您的 SPEL+项 目。 请参阅 4.2.7 自动启动 。
EPSON RC+ 7.0(Ver.7.0)用户指南 Rev.3
若要使用操作窗口让程序启动和停止,控制装置必须从[设置]-[设置控制器]-[控制 器]-[配置]中设置设为 Self。 有 关 配 置 EPSON RC+ 7.0 自 动 启 动 的 详 细 信 息 , 请 参 见 操 作 一 章 中 的 “ 启 动 模式 ”。
远程控制 使用远程控制打开/关闭电机,将机器人返回起始点,启动程序等。可以用一个简单 的按钮盒或可以连接 PLC。 使用远程控制时,控制装置必须在[设置]-[设置控制器]-[SPEL 控制器板]-[配置]中设 置为远程。
编写和运行简单的应用程序从运行菜单中选择运行窗口或按下f5开始命令的快捷键来运行该程712应用程序布局在编写应用程序之前您需要确定您的应用程序的使用目的以及该项目构建的方式
爱普生机器人软件编程操作培训-基础内容PPT课件
1)单击程序最左端设置断点
2)在工具栏上单击打开运行窗口图标“ ” ,打开运行窗口,单击
“开始”运行程序
3)按“F11”或单击图标“ 个断
点。
” 运行下一行。按“F7”或单击图标“
” 运行到下一
单击此处 设置断点
单击“开始”运行函数
爱普生机器人软件编程操作培训-基础内容
1、程序操作
1.6 局部变量、模块变量及全局变量的定义及区别
Integer I
‘局部变量i
...
Fend
Function Func1 Integer I ... Fend
‘局部变量i
爱普生机器人软件编程操作培训-基础内容
1、程序操作
1.7 编写一个初始化函数打开马达、设定运行功率及速度(参看程序init_demo)
爱普生机器人软件编程操作培训-基础内容
1、程序操作
1、程序操作
3)以太网通讯程序
爱普生机器人软件编程操作培训-基础内容
1、程序操作
爱普生机器人软件编程操作培训-基础内容
1、程序操作
1.13 矩阵使用程序(参看程序pallet_demo) 1)矩阵定义
爱普生机器人软件编程操作培训-基础内容
1、程序操作
2)矩阵调用程序
爱普生机器人软件编程操作培训-基础内容
1)局部变量:在一个函数内定义的变量,只能在同一函数内使用 2)模块变量:在程序的开头定义,可以在同一个程序里使用 3)全局变量:可以在同一个项目里使用
Integer m_i
‘模块变量m_i
Global (Preserve) Integer g_i
‘全局变量(全局保护变量)g_i
Function main
爱普生培训资料:EPSON机械手软件操作指南
四、RC+5.4.3软件操作 (5)在“点数据”页面单击“保存”按钮,完成示教点。
四、RC+5.4.3软件操作
五、 马达重置及伺服OFF
工具 →机器人管理器→控制面板或单击工轴刹车释放后要按住 伺服指示灯旁边白色按
钮才能手动移动Z轴
运行功率设置
四、RC+5.4.3软件操作
1、 示教点步骤
(1)在“点数据”页面中“点文件”下拉菜单中选择需要教点的点文件
单击选择点文件
四、RC+5.4.3软件操作
(3)微动将机械手移动的需要示教点的位置。如果是SCARA机械手,Motor On情况下,可以在 Control Panel 页面Free All释放所有轴后,手动将机械手移动需要示教点的位置后,Lock ALL锁定所有轴。
EPSON机械手软件操作指南
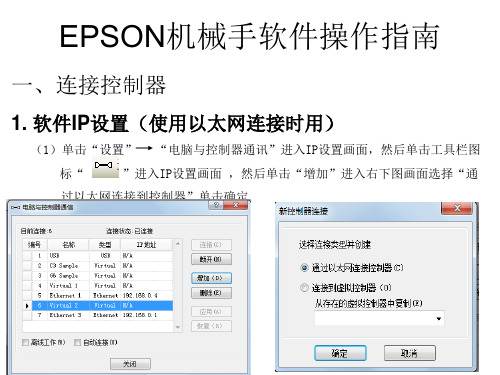
一、连接控制器
1. 软件IP设置(使用以太网连接时用)
(1)单击“设置” “电脑与控制器通讯”进入IP设置画面,然后单击工具栏图
标“
”进入IP设置画面 ,然后单击“增加”进入右下图画面选择“通
过以太网连接到控制器”单击确定
四、RC+5.4.3软件操作
(2)设置新增以太网连接名称及IP地址 ,控制器出厂默认控制器IP设置如右下图所示 设置好IP后单击应用,如果控制器IP忘记了,可以先用USB线连接控制器然后在 “设置”|控制器|configuration里可以查看控制器IP,电脑IP的前三位要与控制 器的前三位相同,例如“192.168.0.10”
四、RC+5.4.3软件操作 2、选择“控制器”单击“下一个”进入如下画面
四、RC+5.4.3软件操作
3、修改程序名称(可不修改)设定存储磁盘后,单击“下一个” 进入如下画面,然后单击“导入”即可将控制器内的程序读取出 来。
爱普生机器人软件编程操作培训-基础内容.ppt

或多个坐标值。 若要设置某个坐标的绝对值,使用冒号,后跟轴的字母和值。 若要向坐标添加相对偏移值,使用一个轴字母,后跟括号中的偏移值或表达式。如 果偏移值为负,则轴字母的前面是减号。如果省略了括号,其将被自动添加。 Go P1 -Z(20) 偏移Z 轴-20mm,移动到P1 Go P1 :Z(-25) 偏移Z 轴到-25mm 的绝对位置,移动到P1 Go P1 -X(20) +Y(50) :Z(-25) 以X 和Y 相对偏移量和Z 绝对位置移动到P1
设置控制器IP地址,IP地址前3位 与上位机保持一致,最后一位与 上位机不同。例如上位机IP为
192.168.1.1 控制器IP设为192.168.1.10
19
1、程序操作
2)以太网端口设置 单击“设置”,选择“系统配置”打开控制器设置画面。单击“TCP/IP”,
选择一个端口号,进入下图所示以太网端口设置画面,IP地址、端口,结束符 设置与上位机保持一致。设置好后单击“应用”,然后关闭设置画面
31
1、程序操作
32
1、程序操作
33
结束
谢谢
34
P1 = XY(200, 100, -25, 0) '向点P1分配坐标
Pick = XY(300, 200, -45, 0) '向点pick位置分配坐标
P10 = Here '向当前位置分配某个点
P1=p2
‘将点P2赋值给P1
2) 用点标签调用点位
For i = 0 To 10 Go pick Jump place
1)在工具栏上单击创建并下载程序图标“ ”或者单击打开运行窗口图标 “ ” ,软件即会编译程序,如果程序没有错误就会将程序下载到控
爱普生初级培训资料

关闭伺服 打开伺服
在伺服ON时可以选择 单独释放一个或多个 轴,六轴机械手除外
当机械手出现报 警时单击重置复
位报警
22
四、RC+ 7.0软件操作
4.1 点位示教
工具→机器人管理器 →步进示教 或单击工具栏 图示
图标后,选择“步进示教”页面。如下
模式说明:
默认:在当前的局部坐标系、工具坐标系、机械手属性、ECP坐标系上,向X、Y、Z轴的方向微动动作。 如果是SCARA型机械手,也可以向U方向微动。如果是垂直6轴型机械手,则可以向U方向(倾斜)、V方 向(仰卧)、W方向(偏转)微动。 工具 : 向工具定义的坐标系的方向微动移动。 Local: 向定义的局部坐标系的方向微动移动。 关节 : 各机械手的关节单独微动移动。不是直角坐标型的机械手使用Joint模式时,显示单独的微动 按钮。 ECP : 在用当前的外部控制点定义的坐标系上,微动动作。
1)单击“项目”,选择“打开”,打开下图图所示窗口
选择文件存储目录
单击“打开”打开 一个项目
微动按钮
输入点标签(可省略)
选择要示教的点位
单击“示教”进入右 图画面
单击“确定” 25
四、RC+ 7.0软件操作
3) 保存点文件
在“机器人管理器”界面里单击“点数据”,单击“保存”。或者在工具栏单击图 标“ ”也可保存点文件。
单击此图标保存 所有文件
单击“保存” 26
四、RC+ 7.0软件操作
(2)设置新增以太网连接名称及IP地址 ,控制器出厂默认控制器IP设置如右下图所示 设置好IP后单击应用,如果控制器IP忘记了,可以先用USB线连接控制器然后在 “设置”|控制器|configuration里可以查看控制器IP,电脑IP的前三位要与控制 器的前三位相同,例如“192.168.0.10”。设置好IP地址后单击“连接”连接控 制器 。
爱普生培训资料:EPSON RC+模拟器培训

→
,选择控制器→机器人→增加
4
一.创建仿真器
3.创建设置机器人型号,下面以LS3-401S为例,如图 设置一个名称 设置一个序列 号(随意) 选择型号 点击确定,等到控制 器重启完毕
5
二.仿真器窗口布局
1.返回EPSON RC+ 7.0 主窗口,点击模拟器
显示下图窗口
6
二.仿真器窗口布局
(1).工具栏
18
结束
谢谢
19
20
在仿真器中,可以载入事先设计好的治具,方便模拟时更直观
先选中布局控件中,机器人一栏
标
,出现下图
,点击工具栏中的“Hand”图 路径找到放置治具的文件夹
文件类型切换到 “.stp”格式 选中并打开
17
三.载入治具
选择完治具后,可在布局控件中选中Hand,即可设置治具位置,角度等对 应的选项.
→
→
→
→
7
二.仿真器窗口布局
重置碰撞
模拟器设置
重置碰撞检测状态。 点击这个按钮的同时机器人不会干扰任何布局控 件,红色显示变为正常。 显示[模拟器设置]对话框。
截屏 输出视频
经过时间
清除经过时间 清除末端夹具路径
将当前3 维显示保存为图像文件。 出现一个对话框,可指定文件名和格式,然后再 进行保存。 在回放模式下播放模拟结果(日志文件),并保 存到影片文件中。出现一个对话框,可指定文件 名和格式,然后保存。 显示程序的执行时间,就如同您是在用一个真正 的控制器运行同一个程序。 程序启动时,经过时间计数器是在程序完成时从 0 到停止开始计数的。 它在程序暂停时暂停计数,继续执行时 恢复。 重置经过时间。 清除机器人显示的夹具末端路径。
EPSON机器人培训教程

03
机器人运动控制指 令详解
04
调试工具使用及常 见问题排查
高级功能与应用实例
01
02
机器人视觉系统配置与调试
复杂轨迹规划与实现
03
04
多机器人协同作业配置
机器人与外部设备通信
故障诊断与维护保养
常见故障现象与原因分析 机器人日常维护保养项目
故障诊断方法与步骤 预防性维护计划制定与执行
05
EPSON机器人行业应用案例
EPSON机器人培训教程
目录
• EPSON机器人概述 • EPSON机器人硬件组成 • EPSON机器人软件编程 • EPSON机器人操作实践 • EPSON机器人行业应用案例 • EPSON机器人未来发展趋势
01
EPSON机器人概述
Chapter
EPSON机器人发展历程
1980年代
EPSON开始研发工业机器人,推出首 款SCARA机器人。
数据处理
EPSON机器人可以接收和处理各种传感器数据,如位置、速度、加速度等。通过数据滤波、融合等技术,提高数据的准 确性和可靠性。同时,可以使用数据结构(如数组、列表、字典等)存储和管理数据。
算法应用
根据具体需求,选择合适的算法进行实现,如路径规划、轨迹跟踪、图像识别等。可以使用现有的算法库或自定义算法, 注意算法的实时性和准确性要求。
执行器
机器人的执行器主要包括电机、减速器等,用于将 控制器的指令转化为实际的运动。EPSON机器人 通常采用高精度、高效率的伺服电机,确保运动的 准确性和稳定性。
传感器与感知系统
传感器
EPSON机器人配备了多种传感器,如 位置传感器、速度传感器、力传感器 等,用于实时监测机器人的状态和环 境信息。
爱普生培训_软件部分

江苏力德尔电子信息技术有限公司
LOGO 7
2.1 新建项目
ห้องสมุดไป่ตู้
LOGO
1. 新建项目步骤如图所示。 2. 项目文件夹的路径为C或D:\EpsonRC70\projects\
江苏力德尔电子信息技术有限公司 8
2.2 项目的导入和导出
LOGO
• 导入:将控制器中的项目文件导入到电脑的 projects文件夹。
LOGO
如图,在安装完润滑剂/电池后,进入控制器报警 页面,选中红色报警栏目,点击改变按钮,填入安装润 滑剂/电池时间后点击确定按钮。
江苏力德尔电子信息技术有限公司 27
当安全门打开时,若机械手位置发生变更,安全门关闭后,机械手能自 动恢复到之前位置。 5. 独立模式
使用远程IO控制时需勾选此选项。 5. 当MainXX函数启动时清除全局
机械手主任务运行开始时,自动清除全局变量中的数据。 6. 启用后台任务 江苏力德尔电子信息技术有限公司
5
1.3 控制器参数的备份与恢复
新项目文件写入到控制器中。
江苏力德尔电子信息技术有限公司 10
三、调试
3.1 命令窗口 3.2 IO标签编辑器和IO监视器 3.3 任务管理器 3.4 机器人管理器
江苏力德尔电子信息技术有限公司
LOGO 11
3.1 命令窗口
可以手动输入并执行SPEL+命令并查看结果。
LOGO
江苏力德尔电子信息技术有限公司 12
江苏力德尔电子信息技术有限公司
LOGO 19
4.2 输入输出相关命令
1. On、Off 打开/关闭输出位,通过I/O 和存储器I/O 来使用。 2. Oport 读取输出位的状态。 3. Sw 读取输出位的状态。 4. Out 输出1 字节(8 位)的输出数据,通过I/O 和存储器I/O 来使用。 5. OutW 输出1 个字(16 位)的输出数据,通过I/O 和存储器I/O 来使用。 6. MemOn/Memoff 是按照位编号打开/关闭指定的存储器I/O 的命令。 7. MemSw 是用于返回指定存储器I/O 位的状态的函数。 8. MemOut 是以字节为单位返回存储器I/O 状态的命令。 9. Wait 按照事件条件进行待机。 10. Input 接收显示装置的输入并保存到变量中。 11. Print 在输出画面、命令画面或操作窗口显示数据。 12. OpenNet/CloseNet 打开/关闭TCP/IP 网络端口。 13. SetNet 设置TCP/IP 端口的参数。 14. ChkNet 返回网络端口的接收缓冲器内的字符数。 15. Read 从文件或通信端口读取指定的字符数。
EPSON从入门到精通

此窗口显示当前控制 器的系统历史记录中 已记录的事件、错误 和警告。
参阅EPSON RC+7.0用户指南5.8.3
21
1.5 RC+软件介绍
1.5.5 机器人管理器
工具-机器人管理器(快捷键:F6)
[控制面板]:页面包含基本的机器人操作按钮,如电机开/关和机器人导航。它同 时显示紧急停止、安全防护、电机和运行功率的状态。 [步进示教]:页面主要用于将机器人步进到所需的位置上并使用当前的坐标和方向 示教点。 [点数据]:您可以输入/删除点数据。如果选中一个点文件,机器人控制器会将文 件加载到内存中。 [Arch设置]:此页面允许您在机器人的拱形(Arch)表中配置起始Z 值和结束Z 值 的设置。拱形用于Jump、Jump3 和Jump3CP 动作命令。拱形表中有七种不同的 设置。 [本地坐标]:此页面允许您定义机器人的本地坐标系。选中该页面时,显示当前值。 [工具]:此页面允许您定义机器人的工具设置。选中该选项卡时,显示当前值。
参阅EPSON RC+7.0用户指南5.11.1
22
1.5 RC+软件介绍机器人管理器(快捷键:F6)
15
1.4 机械手的手臂姿势
1.4.2 垂直6轴型机械手手臂姿势
16
1.4 机械手的手臂姿势
1.4.3 示教点位时会记录点的位置及手臂姿势等信息。
1.4.4 程式中指定机械手的手臂姿势 记述为“/”与后面的L(左手姿势)或R(右手姿势)、A(上肘姿势)或B(下肘姿 势)、F(手腕翻转姿势)或NF(手腕非翻转姿势)。手臂姿势有8种组合,如表1示, 但因点而异,并非所有的组合都可以动作。 垂直6轴型的机械手在第4关节、第6关节同轴的点上,即使将第4关节、第6关节旋转 360度,也可以实现相同的位置姿势。作为用于区别像这样点的点属性,有J4Flag和 J6Flag。指定J4Flag时,请记述斜杠(/)和其后的J4F0 (-180<J4关节角度 <=180)、或J4F1(J4关节角度<= -180 或180 < J4关节角度)。 指定J6Flag时,请记述斜杠(/)和其后的J6F0 (-180<J6关节角度<=180)、或 J6F1 (-360 < J6 关节角度<= -180 或180 < J6 关节角度<= 360 )、或J6Fn(180*(n+1) < J6关节角度<= 180*n 或180*n < J6关节角度<= 180*(n+1))。
EPSON机械手导入培训(5)

EPSON机械手导入培训(5)一、教学内容本节课我们将学习EPSON机械手的导入培训内容,主要涉及第五章的内容。
其中包括机械手的基本结构、工作原理、操作方法以及编程控制等方面的知识。
二、教学目标1. 让学生了解并掌握EPSON机械手的基本结构和功能。
2. 培养学生对机械手操作的熟练程度。
3. 使学生能够运用编程控制机械手进行简单的操作任务。
三、教学难点与重点重点:EPSON机械手的基本结构、工作原理和操作方法。
难点:编程控制机械手的操作。
四、教具与学具准备教具:EPSON机械手一台、操作面板一个。
学具:学生操作手册、编程软件。
五、教学过程1. 实践情景引入:介绍EPSON机械手的应用领域,如工业生产、教育科研等,让学生对机械手有初步的认识。
2. 基本结构讲解:讲解EPSON机械手的基本结构,包括手臂、关节、末端执行器等部分,并展示实物图片。
3. 工作原理介绍:介绍机械手的工作原理,如动力传输、控制系统等,并通过动画或视频形式展示机械手的工作过程。
4. 操作方法学习:讲解并演示机械手的操作方法,包括关节控制、末端执行器控制等,让学生进行实操练习。
5. 编程控制讲解:介绍机械手的编程控制方法,包括编程语言、指令集等,并通过实例讲解编程控制的过程。
6. 随堂练习:让学生根据编程指令,控制机械手完成特定的操作任务,检验学生对编程控制的理解和掌握程度。
7. 板书设计:机械手基本结构:1. 手臂2. 关节3. 末端执行器机械手工作原理:1. 动力传输2. 控制系统机械手操作方法:1. 关节控制2. 末端执行器控制机械手编程控制:1. 编程语言2. 指令集3. 编程控制过程8. 作业设计题目1:请简述EPSON机械手的基本结构。
答案:EPSON机械手的基本结构包括手臂、关节、末端执行器等部分。
题目2:请解释EPSON机械手的工作原理。
答案:EPSON机械手的工作原理主要包括动力传输和控制系统两个方面。
题目3:请描述如何操作EPSON机械手。
EPSON ROBOT 导入培训
EPSON ROBOT 导入培训EPSON ROBOT 导入培训⒈概述本培训旨在介绍如何使用 EPSON 系统进行导入操作。
通过本培训,您将了解如何正确设置和使用系统,以进行高效的导入任务。
⒉系统要求在开始导入培训之前,请确保满足以下系统要求:●EPSON 系统(包括控制器、臂、传感器等)●PC 或控制台连接系统●适当的操作软件和驱动程序●具备基本的编程和操作知识⒊操作前准备在进行导入任务之前,您需要进行以下操作前准备:⑴系统设置●安装控制器,并将其与臂和传感器连接。
●安装适当的驱动程序和软件,并确保它们与系统兼容。
●对系统进行必要的校准和调试,确保其正常运行。
⑵数据准备在进行导入任务之前,您需要准备以下数据:●导入文件:将要导入到系统中的文件,可以是 CAD 文件、程序文件等。
●导入参数:设置导入过程中的参数,如坐标系、单位等。
⒋导入操作以下是进行导入操作的步骤:⑴打开软件启动控制软件并登录到系统。
⑵创建新项目创建一个新的项目,命名为“导入任务”。
⑶导入文件选择要导入的文件,并将其加载到系统中。
根据文件类型和需求,选择合适的导入选项和参数。
⑷设置导入参数根据导入文件和任务要求,设置合适的导入参数。
这包括坐标系选择、单位设置等。
⑸预览导入结果在进行实际导入之前,预览导入结果。
检查坐标位置、姿态、路径等是否正确。
⑹执行导入操作确认导入参数和预览结果无误后,执行导入操作。
系统将根据设置将文件导入到系统中。
⑺验证导入结果导入完成后,验证导入结果是否与预期一致。
检查系统中的位置、路径等是否正确。
⒌常见问题解答以下是一些常见问题及其解答,以帮助您更好地理解导入操作:⑴为什么导入结果与预期不符?可能是导入参数设置有误,或者文件本身存在问题。
请检查导入参数和文件,并重新执行导入操作。
⑵如何处理导入失败的情况?导入失败可能是由于文件格式不支持或文件损坏。
请确保文件格式正确,并尝试使用其他文件进行导入。
⒍附件本文档涉及的附件包括:●EPSON 系统操作手册●控制软件安装包●示例导入文件⒎法律名词及注释在本文档中有以下法律名词及注释:●:按照 ISO 8373 标准,是可编程的多功能操作设备,可以自动执行一系列任务或操作。
2024年EPSON机器人视觉培训

EPSON机器人视觉培训EPSON视觉培训一、引言随着工业4.0的深入推进,视觉技术在工业自动化领域中的应用越来越广泛。
EPSON作为全球领先的工业制造商,其视觉系统具有高精度、高速度、高稳定性等特点,为我国制造业的转型升级提供了有力支持。
为了使广大用户更好地了解和掌握EPSON视觉技术,本文将对EPSON视觉培训进行详细介绍。
二、EPSON视觉系统简介1.高精度:EPSON视觉系统采用先进的图像处理算法,能够实现高精度的图像识别和定位。
2.高速度:EPSON视觉系统具有快速图像处理能力,能够满足高速生产线的需求。
3.高稳定性:EPSON视觉系统采用稳定的硬件平台和成熟的软件算法,确保系统长期稳定运行。
4.易于集成:EPSON视觉系统可以方便地与其他自动化设备集成,实现完整的自动化解决方案。
三、EPSON视觉培训内容1.视觉系统原理:介绍视觉系统的基本原理,包括图像传感器、光源、镜头等组成部分,以及图像处理的基本流程。
2.视觉系统硬件:介绍EPSON视觉系统的硬件组成,包括视觉传感器、图像处理单元、控制器等。
3.视觉系统软件:介绍EPSON视觉系统的软件组成,包括视觉处理软件、编程软件等。
4.视觉系统应用:通过实际案例,介绍EPSON视觉系统在工业自动化领域的应用,如组装、检测、搬运等。
5.视觉系统调试与优化:介绍视觉系统的调试方法和优化技巧,提高视觉系统的性能和稳定性。
6.视觉系统维护与故障排除:介绍视觉系统的日常维护方法和常见故障的排除方法。
四、EPSON视觉培训形式EPSON视觉培训采用理论教学与实践操作相结合的方式,具体包括:1.理论课程:通过PPT讲解、视频演示等形式,使学员掌握视觉系统的基本原理和操作方法。
2.实践操作:学员在培训讲师的指导下,进行视觉系统的实际操作,包括硬件连接、软件配置、程序编写等。
3.案例分析:通过分析实际案例,使学员了解视觉系统在不同场景下的应用方法。
4.互动交流:学员与培训讲师、其他学员进行互动交流,分享经验和心得。
EPSON导入培训

表1
25
二、系统构成
硬件概要
26
二、系统构成
系统构成
感应器 IO输入 IO输出 执行机构 Nhomakorabea程序
逻辑控制
机械手 编码器
机械手 位置 视觉 交互 数据 通讯 点位 数据 机械手 伺服马达
数据
27
三、EPSON RC+ 用户界面
28
四、示教
1. 微动Jog &Teach页面
打开Jog&Teach页面: Tools →Robot Manager →Jog&Teach或单击工具栏 图标后,选择Jog&Teach页面。如下图示
22
一、关于机械手的基础知识
2. 机械手的手臂姿势
在使用机械手作业时,有必要使其用示教时的手臂姿势在指定的点上动作。否则,根据手臂 姿势的不同,会产生轻微的位置偏移,或朝着意想不到的路径动作的结果,有干涉周边设备 的危险。为了避免这种情况,在点数据中必须事先指定使其在此点上动作时的手臂姿势(如 下图)。此信息也也可以从程序中变更(\L或者\R)。
六、动作指令
1. 动作指令分类 使机械手动作的指令叫作动作指令。 可分为:PTP动作指令,CP动作指令,Curves动作指令,Joint动作指令。
类型 PTP CP
指令 Go、Jump、BGo、TGo
说明 以机械手最容易运动的方式达到目 标位置的动作命令
Move、Arc、Arc3、 机械手按指定运动轨迹到达目标位 Jump3/Jump3CP、 Bmove、 置的指令 TMove、CVMove
706mm 0.44second 4591mm/s
895mm 0.49second 4215mm/s
爱普生投影机管理软件说明书

免费的专业软件可以帮助用户通过电脑端对单台或多台投影机进行操控、设置及调试。
让投影机的管理更高效, 同时节省更多成本。
简单易用的Epson Projector Management,可监控多台联网投影机(最多2,000台)。
投影机的电源状态、故障、警报等都可以被直观地察觉,还可通过电子邮件获知投影机的异常。
Epson Projector Professional ToolEpson Projector Management注意:某些功能不支持Epson Projector Professional Tool。
使用Epson Projector Professional Tool必须连接网络。
全能型激光投影机,引领激光新时代CB-L730U 爱普生3LCD 激光工程投影机5秒迅速开机*2360度全方位安装专业内容管理软件超过2,500,000:1高对比度*4*53LCD 投影技术接口丰富,含供电接口20,000小时免维护*3WUXGA(1920×1200)高清分辨率镜头位移范围覆盖大,安装灵活性增强16:6宽屏模式多重投影效果1.6倍手动变焦和镜头位移覆盖范围增加,有效地提升了安装的灵活性。
C B -L 730U 支持16:6宽屏模式,最大屏幕尺寸可达452英寸,并且可以通过遥控器调整屏幕位置,这样可以留出非投影区域,用户可以在无影像区域进行板书书写。
可以在投射图像上增加颜色滤镜、形状蒙版和调节亮度来展现更多元的视觉效果。
颜色滤镜 形状模版投影视频源Zoom rangeLens shift range20%(max)20%(max)50%(max)50%(max)备注:支持安卓系统和快速启动模式开启时,按下电源按钮后图像投影的大概时间。
时间会根据使用情况而有所不同。
根据设备类型、输入源信号、数据大小等的不同,它可能需要更长的时间来准备使用。
12左中右非投影区域(白板)*1用户可以在亮度100%~70%之间进行精确到1%的亮度调节*。