基于协议利用进行电控单元标定
基于CCP协议利用CANape进行电控单元标定
目前基于CAN(Controller Area Network)总线的分布式系统在汽车电子领域得到广泛应用,电子控制单元的标定已成为汽车电子控制装置开发的一个重要环节。
CCP(CAN Calibra tion Protocol)是一种基于CAN总线的ECU(Electronic Control Unit)标定协议[1],已经在许多欧美汽车厂商得到应用,采用CCP协议可以快速而有效地实现对汽车电控单元的标定。
然而基于CCP协议的标定,需要在ECU内部实现支持CCP协议的驱动程序(CCP drive r)。
目前大多数应用都采用Vector提供的free CCP driver[2]。
考虑到ECU底层程序与C AN驱动程序的实现各不相同,将CCP驱动程序结合到ECU中[3]并不是一件一蹴而就的事,这需要对CCP协议本身、标定工具及标定工具与ECU之间的通信有详细和深入的了解。
在整个标定系统的开发过程中,大量时间被耗费在前期CCP驱动程序与ECU结合上。
本文在简单介绍CCP协议的基础上,提供了一个通用的ECU与CCP驱动程序结合的实例,以帮助缩短整个标定开发周期。
CANape[4]是一款ECU标定和测试工具。
与CCP协议相结合,不仅能完成对ECU的标定,同时还能在ECU运行期间直接访问内存并进行操作。
这使得CANape不仅是一款功能强大的标定工具,也是一款电控单元开发的得力助手。
然而在使用方面,CANape的前期配置比较繁琐,目前国内的相关资料较少。
本文将介绍CANape,并着眼于如何基于CCP协议使用CANape完成ECU的标定。
1 CCP协议及工作原理CCP协议是ASAP(Arbeitskreis zur Standardisierung von Applikationssystemen)标志的有机组成部分。
ASAP作为一个应用系统标准化工作小组,其目的在于提供通用软、硬件接口标准,以解决由于不同制造商提供的控制器存在的接口不匹配问题。
基于CCP协议的电动汽车AMT标定方法

基于CCP协议的电动汽车AMT标定方法【摘要】本文基于在线标定协议CCP(Can Calibration Protocol)设计并开发了应用于电动汽车自动变速器(AMT)控制单元(TCU)的整车控制在线标定系统。
通过该方法实时在线的快速标定整车控制参数、换档规律,以达到快速优化换挡品质、提升电动车整车动力性、经济性指标的目的。
【关键词】CCP协议;电动车;AMT;标定1引言电动汽车因具有低污染、低噪声、能量效率高、能量来源多样化的特点,使得开发以电动汽车为代表的各种新能源汽车,成为解决汽车带来的诸多问题的有效途径[1]。
自动变速技术在纯电动车辆中的引入,能够大幅提升汽车的动力性能,有效的增大系统的能源利用效率,从而提高对于纯电动汽车最为重要的续航能力。
作为电动汽车驱动技术的关键环节,自动变速系统控制器(TCU)控制参数的在线标定对整车性能将产生至关重要的影响[2]。
因此,开发符合纯电动车自动变速系统的标定系统,通过方便快捷的标定技术提升电动汽车的各项性能,对于电动车实现产业化发展具有重要的现实意义。
本文以纯电动汽车为基础车型,以AMT自动变速系统为研究对象,通过开发的基于CCP协议的在线标定系统,对其TCU控制参数、换挡规律等进行在线标定,并在整车道路试验中进行了验证。
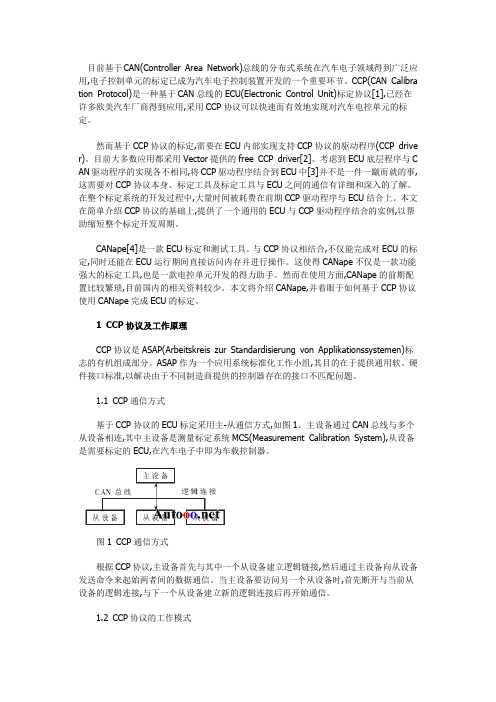
2 CCP协议及工作原理2.1 CCP通信方式基于CCP协议的ECU标定采用主-从通信方式。
主设备通过CAN总线与从设备相连,其中主设备是测量标定系统,从设备是需要标定的ECU。
根据CCP 协议,主设备首先与从设备建立逻辑链接,然后通过主设备向从设备发送命令来起始两者间的数据通信。
2.2 CCP报文帧结构基于CCP协议的标定只占用两帧CAN报文,分别是命令接收对象CRO和数据传输对象DTO。
CRO由主设备发给从设备,DTO是从设备反馈的报文。
两者分别通过一个自己的ID标识符进行标识。
CRO与DTO的ID标识符由通信协议自行定义,CCP协议只对CRO及DTO的数据场做了详细定义。
基于CCP协议的电控单元标定系统通信模块
C P协 议采 用 主从 通信 的方 式 , 一个 主 设 C 即 备 可通 过 C N总线 与 多个 从 设备 相 连 , 在 某 一 A 但 时刻 只 能 有 一 个 从 设 备 能 与 主 设 备 连 接 展 开 通 信 。每个从设备都有一个 特定 的地址 , ] 主设备
通过每个从设备的地址 , 建立一对一 的对应关系 。
供 C N总线需 要 的 大 电流 , 可 以启 动 电流保 护 A 还
功能来 保护 出错 的 C N节点 。U B A A S C N一Ⅱ 双路智
图 5 通信模块整体结构
能 C N接 口卡 的每 一个 C N通 道 都 在 内部 集成 A A 有 10Q 的终端 电 阻 , 2 无需 外加 终端 电阻 , 接 时 连 只需 在收发器 端 安装 10n 的终 端 电 阻 j 2 。采 用 P A 2 20 A C 8 C5C N收发器 , 1Mb s 用 / 的位速 率在
I cP 动 序 I c驱 程 CO Rl fT O D 接 子 序I 发 子 序 收 程 送 程 I
IA 驱 程序 cN 动 f 数据I …… j l 据 …. 数
命令处理 I 模块 I Q l A 处理 D l 模块
微控 制 器 采 用 的 是 H S2系 列 l C1 6位 芯 片
第 0字节为命 令 代码 , 2~ 第 7字 节 中包 含 了与命 令 相关 的命令 参数结构 , 图 1 如 所示 。D O传 递 的 T 则是从 设备反 馈 回的消 息 , 主要 可分 为 3类 : 令 命
返 回消息 (o m n t nm s g cm a dr u es e—D O, R — er a T CM
中 图分 类 号 :P 1. T 3 15 D I1 .93 ji n 29 3 5 .0 2 0 .0 O :0 3 6 /. s .0 5— 82 2 1. 0 7 s 4
基于CCP协议的电控发动机监控标定系统开发

基于CCP协议的电控发动机监控标定系统开发林志华;王东亮;王银辉;黄开胜【摘要】CCP协议是一种基于CAN总线的匹配标定协议,其可靠性和稳定性高,应用范围越来越广.通过采用Labview开发了基于CCP协议的上位机标定监控软件,利用CCP DRIVER实现了下位机与上位机的通讯,实现了数据上传和下载等相关功能.采用本标定系统进行的电控发动机监控标定试验表明该套系统实时性和可靠性好,能够满足发动机标定试验要求.【期刊名称】《汽车科技》【年(卷),期】2011(000)002【总页数】5页(P54-58)【关键词】CCP协议;CAN总线;发动机标定【作者】林志华;王东亮;王银辉;黄开胜【作者单位】清华大学,汽车工程系,北京,100084;清华大学,汽车工程系,北京,100084;陆军航空兵学院,直升机机载设备系,北京,101123;清华大学,汽车工程系,北京,100084;清华大学,汽车工程系,北京,100084【正文语种】中文【中图分类】TP393发动机标定系统是标定工程师根据发动机工况利用已有的控制算法通过修改控制参数和数据,使发动机满足规定性能要求的工具。
目前,基于CAN总线的标定系统已经成为主流。
CCP(CAN Calibration Protocol)是一种基于CAN总线的ECU 标定协议,采用CCP协议可以快速而有效地实现对汽车电控单元的标定。
在许多欧美汽车厂商中CCP协议得到了越来越广泛的应用,如ETAS公司的INCA数据采集标定系统以及VECTOR公司的CANape标定监控系统等,以上商业化软件价格高昂,为降低开发成本,自主开发基于CCP协议、可以针对德尔福等国外厂商提供的发动机管理系统进行标定的工具成为必需。
目前国内有的研究单位利用VECTOR公司的商业化标定软件CANape开发发动机标定系统[1],尚没有完全自主的基于CCP的标定监控系统。
本文采用Labview开发相应的上位机软件,使用Vector公司的free CCPDriver实现下位机的CCP功能,由此构成一套完整的基于CCP协议的发动机监控标定系统,实现了数据上传和下载等相关功能。
基于CCP协议的发动机电控单元匹配标定

张成伟 .龚元 明
( 上 海 工程 技 术 大 学 汽 车 工 程 学 院 , 上海 2 0 1 6 2 0 ) 摘 要 :为 了研 究 对发 动机 电控 单 元 的 匹配 标 定 , 本 文 介 绍 了符 合 匹 配标 定 标 准 化 组 织 ( A S A P ) 标准 的 C C P协 议 , 对 协 议 剖 析 。 阐 述 了如 何 实现 C C P驱 动 与 C A N 驱 动 的接 口程 序 , 讨 论 了利 用 C A N a p e对发 动机 电控 单 元 进 行 基 于 C C P协 议 标 定 的 实现 方 法 。 使 用 C A N a p e能 够 缩 短 开发 周 期 , 快 速 准确 地 进 行 汽 车发 动 杌 电子 控 制 单 元 的 匹 配标 定 , 并 在 实 际开 发 应 用 的 过 程 中达 到 了预 期 效 果 , 使发动机 综合性能得 到
提 高。
关 键 词 :C AN 总线 :CC P协议 ;C ANa p e:匹 配标 定
中图分类号 : T N 0 6
文献标识码 : A
文 章 编 号 :1 6 7 4 — 6 2 3 6 ( 2 0 1 4 ) 0 6 — 0 0 7 9 — 0 3
Ma t c h c a l i br a t i o n o f e ng i ne e l e c t r o n i c c o nt r o l u ni t ba s e d o n CCP p r o t o c o l
基于XCP协议的ECU标定

标定工具一般运行在 PC 机上,能够通过上下位机
之间的通信介质与发动机 ECU 实现数据信息交互,它
主要实现的模块及功能如图 6 所示。
算 ,再 由 ECU 把 计 算 结 果 以 控 制 信 号 的 形 式 发 送 至
CAN 总线网络上,由 CAN 总线把计算结果发送给 PC
标定工具,对传感器输出的数据进行实时采集和存储。
的灵活性和可扩展性。
为参数下载和在线编程两个阶段。
2.3 CAN 驱动通信
2.5 A2L 解析
在基于标定协议的测量与标定系统中,采用 XCP
数据包进行上位机与下位机之间的实际数据通信,XCP
数据包可以通过 CAN 数据包进行传输。在整个测量与
ASAM MCD-2MC 标准是一种对 ECU 中参数信息
监测 CAN 通信状态。通过手动编写包含命令码和数据
包,封装到 CAN 数据帧中发送到 ECU。在接收到 ECU
含了 ECU 中所有参数及其相关逻辑关系的文本文件,
是尽量保证各功能单元模块化、层次化,降低各功能模
被广泛应用于测量与标定系统中。A2L 文件是一份包
参数的读取、修改和保存等功能。标定系统的设计原则
采用规范化的方式描述参数信息,在 A2L 文件中,参数
块间的耦合度,方便后续对软件的升级和针对不同平台
数、总线参数、通信参数设置、硬件信息以及其他系统环
境参数等。在标定工作过程中,可通过标定工具对系统
Copyright©博看网. All Rights Reserved.
配套应用
参数进行配置,以实现对整个系统的管理和调节。所有
可配置的内容都可以被读取、保存并重新载入使用,以
实现系统的运行灵活性。
基于CCP协议的ECU标定系统上位机设计_蔡燕飞

测量标定系统 ASAP1b
驱动
ASAP1a 电控单元
数据库 ASAP2
PC 机 USBCAN 接口卡 ECU(支持 CCP 协议)
A2L 文件
图 1 ASAP 标准
1.2 CCP 协议通信方式 当前系统将采用最新的 CCP2.1 协议。 CCP 协议采
用主-从通信方式,如图 2 所示,主设备与多个从设备 通过 CAN 总线连接。
2012(8)
APPLICATION 技术应用
基于 CCP 协议的 ECU 标定系统上位机设计
蔡燕飞 (北京工业大学)
摘要:为了提高标定系统开发研究的效率,文章采用工业界广泛认可的标定规范 ASAP 作为标定系统软件开发标准,采用 CCP 协议作为标定系统的应用层协议,描述了上位机软件的 3 大主要模块(界面功能模块、CCP 驱动模块和 CAN 驱动模 块)及其开发流程。经反复调试,该上位机软件实现了数据实时监控和参数标定等功能。基于 CCP 协议的标定系统通信稳 定可靠,且传输速率快,其应用推广有利于促进标定系统研究的规范性和通用性。 关键词:CCP 协议; 标定系统; 上位机软件
标定系统作为 ECU 开发过程中的关键工具之一, 主要作用是监控 ECU 工作参数、 在线调整基本 MAP 数据、ECU 控制参数、 工作参数以及离线数据处理等。 文章将开发一款基于 CCP(CAN Calibration Protocol)标 定协议的标定软件[1],供标定系统使用。
1 CCP 协议
在 CCP 驱动模块封装好的消息包,通过调用 CAN 驱动模块,实现消息包的传输功能[5]。 USBCAN 卡提供 了很多库函数,通过对库函数的操作,实现对 USBCAN 卡的操作,主要实现 CAN 的初始化和读写操作[6]。 CAN 驱动模块的硬件接口物理连接着下位机接口模块。
一种新型汽车电控单元标定方案的实现
摘要:为了研究汽车部分电子系统,需要对汽车CAN 网络数据通信中的电控单元进行标定。
介绍了CCP 协议,分析了利用新型标定软件Vehicle Spy3进行基于CCP 标定方案的实现方法,描述了Vehicle Spy3的标定过程。
采用该方法对电控单元进行标定,体现出其标定方案的高性价比与高效性。
关键词:CCP 协议;电子控制单元;标定;Vehicle Spy3中图分类号:U463.6文献标识码:A文章编号:2095-0926(2015)03-0057-03Realization of a new calibration scheme for automotive electronic control unitSONG Han-chao ,YAN Wen-bing ,XU Zheng ,WANG Zhi-qiang(School of Automotive and Transportation ,Tianjin University of Technology and Education ,Tianjin 300222,China )Abstract :In order to study the electronic system of automobile parts ,the electronic control unit (EOV )in data communi -cation in CAN network is P protocol is briefly introduced ,and the implementation method based on Vehicle Spy3is analyzed ,and the calibration procedure of SPY3Vehicle is described in detail.The electronic control unit is calibrated by this method ,which reflects the high performance ratio and efficiency of the calibration scheme.Key words :CCP protocal ;electronic contral unit (ECU );calibration ;Vehicle Spy3收稿日期:2015-04-08基金项目:天津职业技术师范大学科研发展基金资助项目(KJ14-03).作者简介:宋汉超(1990—),男,硕士研究生;阎文兵(1968—),女,教授,硕士生导师,研究方向为振动与噪声控制.一种新型汽车电控单元标定方案的实现宋汉超,阎文兵,徐征,王志强(天津职业技术师范大学汽车与交通学院,天津300222)近年来,汽车电子技术不断发展,在汽车电子技术中对汽车电子控制单元(electronic control unit ,ECU )的研究越来越重要。
基于XCP协议的ECU测量系统设计

摘要随着汽车电子技术的飞速发展,现代汽车系统中加入了越来越多的安全舒适性电控功能。
虽然电子控制单元(Electronic Control Unit,ECU)的数量得到了控制,但是这就意味着要增加单个设备的复杂度来补偿功能的增长。
XCP(U niversal Calibration Protocol)通信协议为这些分布式系统开发过程的合理化做出了重要的贡献,其主要任务包括实时地测量和标定ECU内部变量。
该协议继承了CCP(CAN Calibration Protocol),它的一个巨大优势就是与物理传输层无关。
本文根据XCP标定系统资源库封装XCP协议,利用API函数对标定测量功能进行描述,屏蔽了功能的实现细节。
在ECU的软件开发过程中,应用层只需调用这些接口即可,不需要重复开发。
由于标准资源库是基于硬件抽象的标准接口开发,与硬件无关。
XCP协议实现的协议层与传输层的相互独立。
数据测量(Data Acquisition,DAQ)就是主设备不断获得ECU从设备的采样数据。
选用LINUX系统作为开发环境,TCP/IP作为传输层协议。
实现主设备基于XCP-ON-ETHERNET的对ECU从设备进行数据测量。
【关键词】XCP协议ECU测量DAQ 电控单元ABSTRACTWith the rapid development of automobile Electronic technology,more and more Electronic functions for safety and convenience are finding their way into the modern automobile. Since the number of ECUs is being held in check, however, this means that the complexity of individual devices must grow to compensate. Making an important contribution toward rationalization of the development process for these distributed systems is the XCP communication protocol, whose main tasks include measurement and calibration of ECU-internal variables at runtime. A tremendous advantage of this successor protocol to CCP is its independence of the physical transport layer。
基于的汽车电控单元标定工具箱设计与实现
--丢嘉篆“=二# 一予甄聂雩磊一芊
cAN接收子函数 cAN发送子函数
]-兰再三三碧三一望j
总体的设计流程图如图3所示。由总体设计方 案流程可以得出设计工作主要包括两个方面内容: 1)模型的设计与开发。
2)模块目标文件的定制。
2基于si删llink的标定工具箱的设计
2.1
基于SimllliIlI【的ECU标定系统的结构
采用CCP(cAN
1
ECU标定系统问题分析
基于CCP协议进行标定,需要MCs(测量标定
系统)与ECU的应用程序都能够支持CCP协议。 将CCP驱动程序结合到ECU中需要对CCP协议本 身、标定工具及标定工具与Ecu之间的通信深入的 了解。同时很多标定软件,如cAN印e的前期配置 比较繁琐,每个需要标定的Ecu都要在cAN印e中 进行配置p o。在整个标定系统的开发过程中,大量 时间被耗费在前期cCP驱动程序与Ecu结合上, 极大地影响了标定系统的效率M J。 Matlab/Simulink工具箱中cAN
电子与嵌入式系统。E…i1:412qiqi@163一m。
万方数据
calibmtion‘I’oolkit都提供了从硬件、ccP驱动到 标定软件的全部产品,将CCP驱动和所支持硬件资
科学技术与工程
源的底层驱动紧密的结合在一起。要解决底层标定 系统的通用性和效率问题,需要从结构和方法两方 面进行研究: 1)结构上重点在于将底层标定系统各个功能 层之间的强耦合性打破。通过对底层标定程序的分 析可知,ccP协议的实现部分以及CAN发送接收程 序的接口是相同的,而不同的硬件需要不同的驱动 支持,不同的电控单元需要不同的应用设置。故按 照功能分类构造底层标定系统的层次体系结构。 2)方法上采用基于RTw(real.time workshop) 的代码生成技术。R1W是MATLAB/Simulink的补 充功能模块,它提供了一个从系统仿真到硬件实现 的开发环境。可以将simulink中搭建的仿真模型转 化成个性化、可移植的用户代码。采用R1w技术 可有效地缩短产品开发周期,降低开发成本,同时设 计出高质量的产品∞j。
基于CCP协议汽车电控单元标定系统的设计
户需 求 提 供 不 同 的定 制 功 能 , 能 适 应 P I US 并 C, B 等不 同主机接 口的 E U 标 定 系统 具 有 非 常 重要 的 C
意 义。
图 1 C P通 信 结 构 图 C
C P协 议 定 义 了 两 种 工 作 模 式 Ⅲ : 种 是 C 一 P ln ( 询) 式 , 一 种 是 D ol g 查 i 模 另 AQ( 据 采 集 ) 数 模 式 。在查 询模 式下 嘲 , 、 主 从设 备 之 间通 信 均要 主设 备 发送命 令来 触 发 , 设备 收到 命令 后 , 行相 应 的 从 执 操作 并 反馈 回一 帧报 文 , 就好 像“ 问一 答” 这 一 的交
此 , 究并 掌握 C Pห้องสมุดไป่ตู้核 心 技 术 , 发针 对 不 同用 研 C 开
议 具有通 用 性强 和适 用 范 围广 的特 点 , 论 8位 低 无 速带 C AN 的控 制 器 , 是 3 还 2位 高速 带 C AN 的控 制 器均 可满 足工作 要 求 。 基 于 C P协 议 的 E U 标 定采 用主 一从 通信 方 C C 式, 主设 备通 过 C AN 总线 与 多个 从 设 备 相链 ( 图 见 1E ) 。其 中 , 主设 备是 测量 标定 系统 , 设 备是 需 要 从 标 定 的 E U。根 据 C P协议 , 设 备 首 先 与其 中 C C 主
关键 词 : C C P协 议 ; AN 总 线 ; 定 系统 ; 控 单 元 ;主 / 设 备 C 标 电 从
中图分类号 : 315 TP 1 . 文献标志码 : B 文 章 编 号 :10 —2 2 2 0 ) 30 5 —5 0 12 2 (0 7 0 —0 90
基于CCP协议利用CANape进行电控单元标定

结论
基于CCP协议利用CANape进行电控单元标定是一种高效、准确和安全的标定方 式。通过将CCP协议封装在CAN消息中,可以更好地适应复杂和实时的车辆环 境,同时避免由于修改ECU参数而引起的安全问题。利用CANape工具可以方便 地访问和修改ECU参数,并实时监控车辆性能。因此,基于CCP协议利用 CANape进行电控单元标定在汽车控制领域具有广泛的应用前景和研究价值。
电控单元标定
电控单元标定是指通过修改ECU中的参数,使其适应不同的车辆状态和驾驶需 求。这些参数包括发动机喷油量、点火时间、变速器换挡逻辑等。通过对ECU 进行标定,可以提高车辆的动力性、经济性和安全性。一般来说,电控单元标 定需要专业的设备和工具,以及丰富的经验和知识。
CCP协议原理
CCP协议是一种专门为ECU标定而设计的协议,它使用CAN总线作为通信媒介, 可以在不改变ECU原有功能的情况下进行标定。CCP协议的主要功能包括参数 访问、参数修改、数据存储和安全控制等。其实现方式是将CCP协议封装在 CAN消息中,通过CAN总线与ECU进行通信。
结论
基于UDS协议的汽车电控单元故障诊断服务在汽车维修领域具有重要意义。通 过UDS协议,维修人员可以快速、准确地诊断汽车电控系统的故障,提高维修 效率,降低维修成本,同时也能保障行车安全。在实际应用中,UDS协议为汽 车电控单元故障诊断提供了有效的支持,通过读取和解析ECU中的故障码和参 数,帮助维修人员快速定位故障部位,为解决故障提供了可靠的依据。
基于CCP协议标定混合动力车整车控制器的方法主要包括以下几个步骤:
1、硬件准备:首先需要准备好用于标定的硬件设备,如笔记本电脑、CCP协议 通信线等。
2、软件安装:安装必要的软件工具,如Controller Area Network(CAN) 总线工具、标定软件等。
基于XCP协议车用标定系统的研发

Closing
(),表l给出了这几个函数的具体
内容和指._se令ss组ion成。在执行标定任务时,主节点分
别调用这几个函数。同时,从节点中的XCP驱动
程序对主节点发出的每一个指令进行应答,即可
实现标定任务。
表1标定功能萄数
1)建立对话函数
Setting._up_semion()
获取从节点基本信息 (从节点支持的通讯模
()函数可使主节点上的标定数据下载到从节点 的RAM中,也可将从节点上的标定数据上传到主 节点的HEX文件中。因为控制器ECU中的主程序 所需的各种曲线、脉谱、标定值都存储在 Flash/ROM中。所以标定完毕后,需将这些数据通 过编程写到FlaSh/ROM中,更新原有的标定数据, Reprogramming the slave()函数即用来完成这 个功能,然后调用Closing 束对话。 3.2从节点XCP驱动程序
在交叉通讯模式中,在上~次请求数据包得 到应答之前,可以发送下一个请求数据包,这样 可以提高对话频率,并加快数据传输速度。在该 模式下,从节点中未得到应答的请求数据包有最 大数量限制QUEUE 从节点而无需应答的数据包数量,如图2(c)。
在交叉通讯模式中,不能包含块传输通讯模 式。同样,在块传输通讯模式中,也不能包含交 叉通讯模式。
答后才能发出下一条指令。标定系统中,我们将
不同的XCP命令进行组合,将标定过程用四个基
本标定功能的函数模块来实现141,分别为建立对
话函数Setting u口session()。标定函数Calibrating (),从节点Flash/ROM编程函数
Reprogramming_the slave()和结束对话函数
DISCOh眦(了
()函数来结.esion ()函数让主从节点交换.esion
基于XCP协议支持多总线的ECU标定系统的实现
a multi-bus supported ECU calibration system is implemented,which is in accordance with the widely accepted industry no/xns of measurement, calibration and diagnostic system made by association for standardization of automation and measuring system fASAM —
的 FlexRay总 线 的标 定 系 统 ,无 疑 具 有 很 高 的 技 术 应 用 价 值 。
本 文 基 于 XCP协 议 设 计 了 一 套 ECU 标 定 系 统 ,充 分 利 用 了 XCP协 议 物 理 传 输 层 与 协 议 层 相 互 独 立 的 特
基于 XCP协 议支持多总线 的 ECU标 定系统 的实现
任 银 行 ,张 建 龙 ,殷 承 良
(上 海 交 通 大 学 机 械 与 动 力 工 程 学 院 ,上 海 200240)
摘 要 : 目前 国 内 开发 的 标 定 系 统 大 都 基 于 CCP协 议 ,仅 支持 CAN 总 线 ,系统 的 总 线 兼 容 性 和 可 扩 展 性 不 强 。利 用
CAN 总 线 和 FlexRay总 线 的 传 输 层 ,使 标 定 系 统 同 时 满足 两种 总 线 的 应 用 需 求 。 具 体 的 测 量 标 定 实 验 表 明 :该 系统
基于CCP协议利用CANape进行电控单元标定

基于CCP协议利用CANape进行电控单元标定
丁圣彦;罗峰;孙泽昌
【期刊名称】《电子技术应用》
【年(卷),期】2005(31)12
【摘要】采用基于CAN总线的匹配标定协议,对汽车控制器局域网络中的电子控制单元进行匹配标定.分析了CCP协议用于标定的工作机理,讨论了利用CANape 进行基于CCP标定的实现方法,阐述了如何生成CANape与控制器底层程序的软件接口及具体标定流程.实际应用结果表明,这种方法可以快速有效地实现对汽车网络中各控制器的匹配标定.
【总页数】4页(P5-7,10)
【作者】丁圣彦;罗峰;孙泽昌
【作者单位】同济大学,汽车学院,上海,200092;同济大学,汽车学院,上海,200092;同济大学,汽车学院,上海,200092
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于CCP协议的电控单元标定系统通信模块 [J], 李高坚;袁观练;周洋;侯献军;邹斌
2.基于CCP协议的EPS电控单元CAN传输分析 [J], 刘威;邵文彬;廖武
3.基于CCP协议汽车电控单元标定系统的设计 [J], 张彧;冯辉宗;岑明;甘海云
4.基于CCP协议的发动机电控单元匹配标定 [J], 张成伟;龚元明
5.基于CCP的AMT电控单元标定系统开发 [J], 黄华;席军强;肖宽
因版权原因,仅展示原文概要,查看原文内容请购买。
基于CCP协议的电控单元标定系统通信模块
基于CCP协议的电控单元标定系统通信模块李高坚;袁观练;周洋;侯献军;邹斌【摘要】针对当前基于CCP协议标定系统通信软件匮乏的现状,设计并开发了标定系统的通信模块,将通信模块分为上层通信模块和下层通信模块两个部分,分析了库函数的调用、CAN驱动、CCP驱动以及CAN驱动与CCP驱动间的接口程序,并给出了基于单片机MC9S12XDP512的硬件相关电路,以喷气阀测试为实例,实验结果证明设计的通信模块运行稳定,数据传输速度快,实时性好,为标定系统的进一步开发打下了基础.%One kind of communication module for a new calibration system was designed and implemented in order to alleviate the shortage of communication module for calibration system. The module was based on CAN calibration protocol ( CCP). The communication module was divided into two parts;upper - layer communication module and under - layer communication module. Library function call,CAN driver,CCP driver and the interface programs between CAN driver and CCP driver were comprehensively and systemically analyzed. Relative electronic circuits based on MC9HS12XDP512 microcontroller were provided. The experimental results show that the communication module performs stably and is good at real - time character as well as high data transmit speed. It built a solid foundation for further development of calibration system.【期刊名称】《武汉理工大学学报(信息与管理工程版)》【年(卷),期】2012(034)004【总页数】5页(P421-425)【关键词】标定系统;CAN;CCP;通信模块【作者】李高坚;袁观练;周洋;侯献军;邹斌【作者单位】上汽通用五菱汽车股份有限公司技术中心,广西柳州545000;上汽通用五菱汽车股份有限公司技术中心,广西柳州545000;武汉理工大学汽车工程学院,湖北武汉430070;现代汽车零部件技术湖北省重点实验室,湖北武汉430070;武汉理工大学汽车工程学院,湖北武汉430070;现代汽车零部件技术湖北省重点实验室,湖北武汉430070;武汉理工大学汽车工程学院,湖北武汉430070;现代汽车零部件技术湖北省重点实验室,湖北武汉430070【正文语种】中文【中图分类】TP311.5随着汽车电子系统网络化的发展,标定系统与电控单元之间存在着越来越频繁、越来越复杂的数据通信,因此,通信模块在标定系统中逐渐成为系统的关键部分。
基于CCP协议的新能源汽车控制器标定系统研究
基于CCP协议的新能源汽车控制器标定系统研究摘要:随着新能源汽车的快速发展和普及,其核心部件之一——控制器的标定技术也越来越受到重视。
本文以基于CAN通信协议的新能源汽车为研究对象,针对其控制器标定问题,提出了一种基于CCP协议的控制器标定系统。
首先介绍了新能源汽车及其控制器的基本概念和相关技术,然后详细论述了CCP协议的原理、特点及其在新能源汽车控制器标定中的应用,接着阐述了新能源汽车控制器标定过程中的需求与挑战,并提出了相应解决方案。
最后,通过实验验证,证明该系统具有良好的控制精度和稳定性,同时也具备良好的实用性和拓展性。
关键词:新能源汽车,控制器,标定系统,CCP协议,控制精度一、引言新能源汽车作为21世纪的重要产业之一,受到了各国政府和企业的广泛关注。
其高效、清洁、环保的特点,符合可持续发展的要求,为人类社会的可持续发展做出了重要贡献。
其中,控制器作为新能源汽车的核心部件之一,其性能和可靠性对整个车辆的运行和使用安全至关重要。
控制器标定是保证控制器性能和可靠性的重要手段之一。
传统的控制器标定技术多采用人工调整方式,效率低、精度不高、周期长,难以适应新能源汽车控制器的快速发展和变化。
因此,研究基于CCP协议的新能源汽车控制器标定系统,成为当前亟待解决的问题之一。
二、新能源汽车及其控制器新能源汽车是指采用新能源(包括太阳能、风能、水能等)作为动力来源,以锂电池、超级电容、燃料电池等作为能量储存装置,运用电动机驱动车轮转动,实现汽车行驶的一种新型汽车。
控制器是新能源汽车的核心部件之一,主要功能是通过控制电机的转速和转矩,实现车辆的加速、制动和驱动等功能。
三、CCP协议原理及其应用CCP(CAN Calibration Protocol)协议是一种基于CAN通信协议的标定协议,主要用于控制器的标定和诊断。
其工作原理是通过CAN总线实现控制器与外部标定工具之间的通信,使标定工具能够读取和设置控制器内部的参数和调节值,从而实现控制器的标定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于CCP协议利用CANape进行电控单元标定
丁圣彦,罗峰,孙泽昌
(同济大学汽车学院,上海200092)
摘
要:采用基于CAN总线的匹配标定协议,对汽车控制器局域网络中的电子控制单元进行匹
配标定。分析了CCP协议用于标定的工作机理,讨论了利用CANape进行基于CCP标定的实现方法, 阐述了如何生成CANape与控制器底层程序的软件接口及具体标定流程。实际应用结果表明,这种方 法可以‘快速有效地实现对汽车网络中各控制器的匹配标定。 关键词:汽车电控单元CAN总线CCP协议标定CANape
CCP发送子函数
令 }≤》
接收序列
i其他应用函数{
Cop_indicator=1
调用eepCommand()
‘ MSCAN接收子函数
Ccp_indicator=o
1.———一其他应用函数 主数……ASAP2描述文件
图4接口程序基本流程图 图5 ASAP2控制器描述文件
CCP协议为确保主设备与ECU之间正常通信,每次 发送后,程序必须通过调用CCP driver中的ccpSendCall. back()子函数检查刚才的DTO是否已经发送,否则不能 发送下一帧报文。针对不同的CAN driver实现,该函数 调用的位置不同。最后主函数将CCP标志位清空,等待 下一条CRO命令。 一个完整的CCP driver接口还包括与ECU其他应用 程序的接口。每次单片机初始化后,主函数调用一次CCP driver的CCP初始化子函数ccpInit(),将上次标定残留在 ECU内存中的数据清空,为下次标定与测量做准备。 CCP协议共定义了28条命令,每条命令在CCP driver中都对应一组相应的子函数,代表不同的功能,如 为了方便用户对ASAP2文件进行维护和修改, CANape集成了一个ASAP2数据库编辑器,用以生成和修 改ASAP2控制器描述文件。所有的信息都能通过对话框 的形式进行设置和修改。该数据库编辑器还能工作在独 立模式下,以生成一个ASAP2格式的控制器描述文件。 当ECU底层程序修改后,一些标定参数和测量数据 的内存地址可能发生变动,CANape虽然仍能进行标定, 但修改的已不是原来需要标定的参数,而是程序变动后 原先地址下当前存放的某个新的未知数据。为了简化手 工修改地址的繁琐,防止因为随意修改某个数据而破坏 程序的正常运行,CANape支持通过linker map文件自动 更新ASAP2文件里的信息。Map文件是ECU底层程序 在编译时由编译器生成的一种映射文件,通过Map文件 可以自动更新ASAP2文件。
个应用系统标准化工作小组,其目的在于提供通用软、 硬件接口标准,以解决由于不同制造商提供的控制器存
在的接口不匹配问题。
1.1
CCP报文帧结构 基于CCP协议的标定只占用两帧CAN报文,分别
CCP通信方式 基于CCP协议的ECU标定采用主一从通信方式,如
是命令接收对象CRO(Command
Receive
命令处理器的调用会在主函数中进行。
主函数通过判断标志位的状态,调用CCP driver的
Code)。对于CRM,主设备由该字节获知命令的执行情 况;对于事件消息,主设备由该位获知从设备内部发生 了哪种错误。第3字节CTR是命令计数器,该位数值与 其对应的CRO的CTR值相对应。剩余5个字节是数据 场,存放主设备请求的数据或信息。 2基于CCP协议的接口程序实现 基于CCP协议进行标定,需要MCS与ECU的应用 程序都能够支持CCP协议,这部分应用程序称为CCP driver。本文采用Vector提供的free
欢迎网上投稿"WWW.aetnet.cn
www.aetnet.coin.cn
《电子技术应用》2005年第12期
万方数据
计算机应用
辑器等。此外,测试过程中由CAN总线上传的数据还可 以通过CANape在计算机显示和保存,以进行离线标定
ECU各模块 初始化
和数据评估。
3.1 ASAP2控制器描述文件及ASAP2编辑器
zur
首先发送一条请求DAQ的命令,从设备收到后,按命令
Standardisiemng
von
中的参数自行配置并组织需要上传的数据,然后按一定 周期自主向主设备上传数据。这种模式由于不需要主机 通过命令逐步控制,工作效率高,但实现较复杂,如果需
要上传的数据量很大,会占用大量ECU内存空间。
1.3
Applikationssystemen)标志的有机组成部分。ASAP作为一
CCP协议的工作模式 CCP定义了两种工作模式:Polling(查询)模式及
DAQ(Data
Acquisition
Command)模式。查询模式下,主设
备与从设备问的每一次通信都由主设备发送命令来起 始,从设备收到主设备的命令后,执行相应的操作并反
馈一帧报文。这种工作模式由于需要主机与从机之间进
相结合,不仅能完成对ECU的标定,同时还能在ECU运 行期间直接访问内存并进行操作。这使得CANape不仅是 一款功能强大的标定工具,也是一款电控单元开发的得 力助手。然而在使用方面,CANape的前期配置比较繁琐, 目前国内的相关资料较少。本文将介绍CANape,并着眼
发生的错误。
・DAQ—DTO(Data Acquisition—DTO):用在DAQ模式 中,由从设备组织,定期向主设备发送。 DTO报文的第1个字节PID(Packet ID)定义了DTo 的类型,255代表CRM,254代表事件消息。第2个字节 为命令返回/错误代码ERR(Command
Return一/Error
1.2
要对CCP协议本身、标定工具及标定工具与ECU之间 的通信有详细和深入的了解。在整个标定系统的开发过
程中,大量时间被耗费在前期CCP驱动程序与ECU结 合上。本文在简单介绍CCP协议的基础上,提供了一个 通用的ECU与CCP驱动程序结合的实例,以帮助缩短 整个标定开发周期。
CANape r41是一款ECU标定和测试工具。与CCP协议
于如何基于CCP协议使用CANape完成ECU的标定。
1
行“一问一答”的信息交互,工作效率不高,但实现简单, 而且占用ECU内存资源较小。 DAQ模式使从设备可以脱离主设备的命令控制按
一定周期自动向主设备上传数据。DAQ模式下,主设备
CCP协议及工作原理
CCP协议是ASAP(Arbeitskreis
0
MSCAN常规
CANape与控制器间的通信需要一个描述文件支持, 这个文件称为ASAP2控制器描述文件14]。CANape对控 制器的参数标定和数据测量都是基于这个文件,该文件 记录了控制器中各参数的详细信息,如标定参数和测量 变量在控制器中的存储地址、存储结构、数据类型和转 换公式等。在CANape中,每个标定参数和测量数据都会 有一个变量名,如发动机温度、冷却水温度。当CANape 需要访问某个变量,就在ASAP2描述文件中根据变量 名,找到该变量在控制器中的存储地址、数据长度等信 息,然后进行操作,如图5。
细分为三类:
进一步交给命令处理器处理。 命令处理器作为CCP driver的一个主要组成部分, 负责将接收到的CRO,通过其CRM代码进行命令解释, 执行相应操作,组织反馈数据并调用CAN发送子函数。 DAQ处理器支持DAQ工作模式,当命令处理器判断收 到的命令为DAQ请求后,进一步将数据传给DAQ处理 器,由DAQ处理器组织数据并直接调用CAN发送子函 数,以DAQ—DTO的形式定期向主设备上传。 基于CCP协议的基本CAN通信流程如图4所示。 ECU接收到报文后,转入CAN接收子函数,在常规接收 流程后,对报文的ID标识符进行判断,如为CRO_ID,则 将CCP标志位(Cep_indicator)置位。由于采用中断方式 接收报文,为了避免占用过多中断时间而影响其他函数 或中断级别较低的程序运行,在对ID标识符进行判断
CMD(Command Code),CCP协议共规定了28条命令[11。
・发送端:DT0通过CAN CAN报文的格式上传给MCS。
driver的发送子函数以
・接收端:主设备发送的命令以CAN报文的格式首
先进入CAN driver的接收子函数,由其判断为CRO后,
从设备通过CMD代码判断主设备请求的是哪条命令。 数据场的第2个字节是命令计数器CTR(Command Counter)。剩余6个字节均为命令参数,每条命令有各自 对应的命令参数。 从设备反馈的报文称为DTO。按CCP协议,DTO又
后,并不直接在函数中调用CCP driver的命令处理器。
・命令返回消息CRM(Command 从设备发送,针对CRO的反馈报文。
Return Message):由
・事件消息(Event Message):当从设备检测到内部发
生错误机制时,由从设备自行向主设备发送,报告其当 前的运行状态,并请求主设备暂停当前工作进程以处理
与DTO_ID)。
下两方面:
主设备 测量标定工具
k J
CRO
CRM—DTO
l
l
DAQ—DTO
l命令处理器l
DAQ数据处理器l
CCP驱动程序 从设备控制器 图2 CCP协议主、从设备通信 图3 CCP标定程序接口
CRO与DTO的ID标识符由通信协议自行定义, CCP协议只对CRO及DTO的数据场做了详细定义。按 照CCP协议,CRO数据场的第1个字节为命令代码
driver中实现,由CCP driver调用。按实际情况,将CAN 发送子函数直接以ccpSend()的形式实现,或在保留原
CCP协议基于CAN总线,因此CCP driver与ECU的结 合主要分为与CAN driver及与其他应用程序两方面。
6
有发送子函数的基础上添加一个ccpSend()子函数,在 其中调用CAN发送子函数,以完成DTO的发送。
图1。主设备通过CAN总线与多个从设备相连,其中主 设备是测量标定系统MCS(Measurement