基于霍夫变换的复杂情况下车道线检测
基于霍夫变换的车道线检测的原理
基于霍夫变换的车道线检测的原理
基于霍夫变换的车道线检测是一种常用的视觉算法,它可以快速、准确地检测出车道线的位置,帮助自动驾驶车辆进行精确控制。
该算法的原理是通过霍夫变换将图像中的所有直线表示为参数空间中的点,然后在参数空间中寻找出现频率最高的点,这些点对应的直线就是车道线。
具体来说,算法的步骤如下:
1. 预处理:将彩色图像转化为灰度图像,并进行高斯滤波以平滑图像,降低噪声干扰。
2. 边缘检测:使用Canny算子进行边缘检测,得到图像中所有的边缘。
3. 霍夫变换:将每条边缘转化为参数空间中的曲线,并在参数空间中进行累加,得到所有直线参数的累加图。
4. 直线筛选:在累加图中找到出现频率最高的直线参数,这些参数对应的直线即为车道线。
5. 绘制:将车道线在原图像中绘制出来,以便进行车辆控制。
需要注意的是,为了提高检测效果,还可以通过ROI(Region of Interest)等手段对图像进行进一步的处理,使算法只在车道线可能出现的区域内进行检测。
综上,基于霍夫变换的车道线检测算法是一种可靠、高效的方法,可以有效地应用于自动驾驶等领域。
基于Hough变换的智能车辆车道线检测
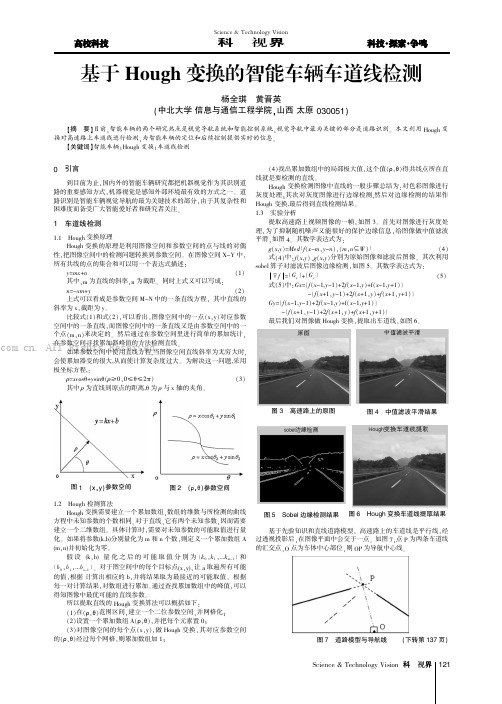
图6Hough变换车道线提取结果0引言到目前为止,国内外的智能车辆研究都把机器视觉作为其识别道路的重要感知方式,机器视觉是感知外部环境最有效的方式之一。
道路识别是智能车辆视觉导航的最为关键技术的部分,由于其复杂性和困难度而备受广大智能爱好者和研究者关注。
1车道线检测1.1Hough 变换原理Hough 变换的原理是利用图像空间和参数空间的点与线的对偶性,把图像空间中的检测问题转换到参数空间。
在图像空间X-Y 中,所有共线的点的集合和可以用一个表达式描述:y =mx +n (1)其中,m 为直线的斜率,n 为截距。
同时上式又可以写成:n =-xm +y (2)上式可以看成是参数空间M-N 中的一条直线方程,其中直线的斜率为x,截距为y。
比较式(1)和式(2),可以看出,图像空间中的一点(x,y)对应参数空间中的一条直线,而图像空间中的一条直线又是由参数空间中的一个点(m,n)来决定的。
然后通过在参数空间里进行简单的累加统计,在参数空间寻找累加器峰值的方法检测直线。
如果参数空间中使用直线方程,当图像空间直线斜率为无穷大时,会使累加器变的很大,从而使计算复杂度过大。
为解决这一问题,采用极坐标方程,:ρ=x cosθ+y sinθ(ρ≥0,0≤θ≤2π)(3)其中ρ为直线到原点的距离,θ为ρ与x 轴的夹角。
1.2Hough 检测算法Hough 变换需要建立一个累加数组,数组的维数与所检测的曲线方程中未知参数的个数相同。
对于直线,它有两个未知参数,因而需要建立一个二维数组。
具体计算时,需要对未知参数的可能取值进行量化。
如果将参数(k,b)分别量化为m 和n 个数,则定义一个累加数组A (m,n)并初始化为零。
假设(k,b)量化之后的可能取值分别为k 0,k 1,...k m -1{}和b 0,b 1,...b n -1{}。
对于图空间中的每个目标点(x,y),让a 取遍所有可能的值,根据计算出相应的b,并将结果取为最接近的可能取值。
车道线检测常用方法

车道线检测常用方法车道线检测是计算机视觉中的重要应用,它通过图像处理的方法来识别道路上的车道线,为自动驾驶车辆、智能交通系统等提供必要的信息。
目前,车道线检测的方法包括基于图像处理的方法和基于深度学习的方法两种。
一、基于图像处理的方法1. Canny边缘检测算法Canny算法是较为常见的边缘检测算法,可以有效检测图像中的边界,常用于车道线检测中。
该算法通过对图像灰度值的变化进行分析,提取边缘信息。
步骤包括高斯模糊、求梯度、非极大值抑制和阈值处理等。
2. 霍夫变换霍夫变换是一种常用的直线检测算法,可以检测图像中的直线。
车道线通常采用直线来描述,因此可以采用霍夫变换来检测车道线。
步骤包括边缘检测、霍夫变换和直线提取等。
3. 基于颜色分割的方法车道线通常呈现一定的颜色特征,可以采用颜色分割来检测车道线。
常用的颜色分割方法包括RGB颜色空间、HSV颜色空间等。
步骤包括颜色空间转换、颜色阈值处理和形态学操作等。
二、基于深度学习的方法深度学习在车道线检测中也得到了应用,特别是卷积神经网络(CNN)模型。
该模型可以通过大量训练数据来学习车道线的特征信息,从而实现车道线检测。
常用的CNN模型包括Faster R-CNN、Yolo等。
总体来说,车道线检测方法有不同的优缺点和适用场景。
基于图像处理的方法简单易懂,但在车道线复杂或噪声较多时效果有限;基于深度学习的方法可以取得更好的效果,但需要大量训练数据和计算资源支持。
未来,随着计算机视觉和深度学习技术的不断发展,车道线检测方法也将不断提升。
基于边缘检测与Hough变换的车道线检测
基于边缘检测与Hough变换的车道线检测摘要随着道路交通的快速发展和汽车保有量的日益剧增,交通安全引起了社会的普遍关注。
统计表明,许多的交通事故是由司机疏忽或疲劳驾驶引起的。
而汽车辅助驾驶系统正是被设计用来在车辆将要驶离车道或者发生碰撞时警告司机,从而帮助司机安全驾驶,避免交通事故的发生。
车道线的检测识别正是实现这一功能的关键技术。
本文对车道线检测识别进行了深入的研究。
首先,介绍了基于边缘检测和Hough变换的车道线检测这一课题的研究背景和意义,综述了该课题的国内外研究现状,并进行了简要分析。
第二,介绍了本课题编程所需要的工具—MATLAB,并简要的介绍了MATLAB的两大特点。
第三,介绍图像预处理。
该模块包括图像灰度化,图像滤波,边缘检测等相关技术,且对每一种技术所包含的常用方法都做了实验进行对比,并选择出了合适的方法(图像滤波选用中值滤波,边缘检测选用自定义差分算子)。
第四,简绍了Hough变换的原理,使用Hough提取并标记车道线。
最后,对本文进行了总结,并提出不足之处,总的来说,本文算法能够有效提取车道线,具有较好的鲁棒性。
关键词车道线检测 MATLAB 图像灰度化边缘检测 Hough变换Lane Line Detection based on edge detection And Hough transformAbstract With the rapid development of road traffic and the increasingly explosion in auto inventory, traffic safety has aroused widespread concern. Statistics show that most of traffic accidents caused by drivers drowsiness, inattentiveness. Driver assistance systems is the design used to be warning the driver when the vehicle leaving the lane or a collision, so it can help to avoid traffic accidents. The real-time lane detection and navigation system is also an essential module of the driver assistance and warning system. This paper is focus on lane detection and departure based on machine vision. Firstly, the thesis introduces the background and significance about the lane detection based on Edge detection and Hough Transform, and then the research status of the thesis topic is reviewed. Finally, it makes a brief analysis.Secondly, this paper describes the tools required for programming- -MATLAB, and makes a brief introduction to the two features of MATLABThirdly, the thesis describe the technology related to image pre-processing module such as image gray, image filtering, edge Detection. And the common methods for each technology included have done experiments to compare and select a suitable method (Selecting median filtering to filter image; Selecting custom difference operator filtering to make edge detection).Fourthly, making a brief introduction of principle of Hough transform and using Hough to extract the lane marker.Finally, conclusions are given with recommendation for future work. Overall, the proposed algorithm can effectively extract the lane, with better robustness.Keywords:Lane detection Edge detection image grey Hough transform MATLAB目录第一章绪论 (1)1.1 研究意义及背景 (1)1.2 国内外技术发展状况 (2)1.2.1国外车道偏离报警系统 (2)1.2.2 国内车道偏离预警系统 (3)1.3 本文主要研究内容 (4)第二章 MATLAB简介 (5)2.1 MATLAB的语言特点 (5)2.2 MATLAB的技术特点: (6)第三章道路图像预处理 (9)3.1 道路图像灰度化 (9)3.2 道路图像滤波 (11)3.3 图像边缘检测 (12)3.3.1 Robert算子 (13)3.3.2 Prewitt算子 (14)3.3.3 Sobel算子 (14)3.3.4 Canny算子 (16)3.3.5自定义差分算子 (17)3.4 本章小结 (18)第四章车道线检测的算法设计 (19)4.1 道路图像检测的常用方法 (19)4.2 基于Hough变换的车道线检测 (21)4.2.1 Hough变换原理 (21)4.2.2 Hough变换提取车道线 (23)4.3 本章小结 (25)结论 (26)1. 论文的主要研究工作 (26)2. 论文需要改进的地方及对后续工作的展望 (26)参考文献: (28)致谢 (30)附录 (31)第一章绪论1.1 研究意义及背景高速公路的通行里程是一个国家发展水平的重要标志之一。
基于霍夫变换的车道线检测的实验报告(一)

基于霍夫变换的车道线检测的实验报告(一)基于霍夫变换的车道线检测的实验报告引言•对于自动驾驶和辅助驾驶等智能交通系统来说,准确检测和识别道路的车道线是至关重要的技术之一。
•本实验报告通过采用霍夫变换方法,对图像进行处理,以实现车道线的检测。
实验设备•一台计算机(配有Python环境)•视频或图像数据集实验步骤1.图像预处理–使用OpenCV库加载图像,并对其进行灰度化处理,以方便后续处理。
–对图像进行高斯模糊处理,以去除图像中的噪声。
2.边缘检测–利用Canny边缘检测算法对预处理后的图像进行边缘检测。
–通过调整边缘检测的参数,可以使得车道线在图像中更加清晰可见。
3.霍夫变换–使用霍夫变换算法对边缘检测后的图像进行直线检测。
–根据设定的阈值和参数,筛选出可能为车道线的直线。
4.车道线检测–根据霍夫变换得到的直线参数,将其画在原始图像上,实现车道线的可视化。
–可以利用额外的算法和技术,如滑动窗口法、曲线拟合等,对车道线进行进一步的处理和优化。
5.实验结果展示–展示处理后的图像和检测到的车道线。
–分析实验结果的准确性和稳定性。
实验总结•本实验使用了霍夫变换方法对图像进行处理,成功地实现了车道线的检测。
•霍夫变换方法具有一定的鲁棒性和稳定性,在处理不同条件下的图像时表现良好。
•通过本次实验,进一步验证了霍夫变换在图像处理中的重要性和潜力。
参考文献1.S. Xie, C. Wang, J. Wang, et al. (2019).Real-time lane detection based on improved Houghtransform. Sensors, 19(21), 4655.2.Y. Liang, Y. Huang, and C. Xu. (2016). Lanedetection algorithm based on adaptive Canny and Houghtransform. Journal of Electronic Measurement andInstrument, 30(6), .3.霍夫变换的原理–霍夫变换是一种数学变换,用于在图像中检测直线等几何形状。
基于霍夫变换的车道线检测的实验报告

基于霍夫变换的车道线检测的实验报告
基于霍夫变换的车道线检测实验报告
1. 引言
•概述车道线检测的重要性和应用场景
•介绍霍夫变换在图像处理中的应用
2. 实验目的
•探究基于霍夫变换的车道线检测算法的原理和性能•分析该算法在实际场景中的适用性和局限性
3. 实验步骤
数据集准备
•选择包含不同道路场景的图像集作为数据集
•对图像进行预处理,如灰度化、边缘检测等
霍夫变换算法实现
•根据霍夫变换的原理,编写车道线检测算法
•设定适当的参数,如边缘阈值、Hough变换参数等
实验结果分析
•对算法进行验证,计算准确率和召回率等性能指标
•分析算法在不同场景下的表现差异
4. 实验结果与讨论
•展示实验结果,包括车道线检测效果图和性能指标统计
•分析实验结果,总结算法的优势和不足之处
5. 结论
•总结实验的主要发现和结论
•提出进一步改进算法的建议
6. 参考文献
•引用相关的学术论文、书籍或网络资料
7. 致谢
•感谢实验所涉及的技术支持和数据提供者
以上为基于霍夫变换的车道线检测实验报告的大纲,提供了一个
框架用于撰写完整的报告。
报告应详细描述实验的目的、步骤和结果,以及对结果的分析和讨论。
同时,合理引用参考文献以及向相关人员
表示感谢也是撰写报告时需要考虑的要点。
基于多约束条件下的霍夫变换车道线检测方法

的追求。 从国内外研究现状来看,大多数方法都是针对特定路
况 (如高 速 公 路,城 市 道 路) 而 特 别 设 计 的。目 前 比 较 流 行的车道线检测算法主要基于特征法和模型法。基于特征 的方法主要是通过车道线边缘点的梯度、方向和灰度值颜 色等等 一 些 低 级 特 征 来 检 测 车 道 线 , [1] 但 是 鲁 棒 性 很 低, 基于模型 法 有 直 线 模 型,B 样 条 模 型, 曲 线 模 型 等 等 , [23] 但是要么鲁棒性不高,要么不够实时。结合模型法和特征 法实现车道 线 精 匹 配 是 提 高 鲁 棒 性 和 实 时 性 较 好 的 途 径。 例如文献 [4 6]提出了根据车道线消失点约束特征点的几 种算法。文献 [7]提出 了 夜 间 提 取 车 道 线 的 算 法, 鲁 棒 性 很好。然而,如 果 车 道 标 记 模 糊 和 残 留,检 测 精 度 可 能 会 恶化。同样,路 面 上 的 反 射 和 污 迹 也 会 影 响 检 测 结 果。 文 献 [8]采用 K-mean聚类像素点收敛最佳匹配车道线。文 献 [10 11]运用 RANSAC 拟合 和 跟 踪 车 道 下。基 于 前 人 打的思想,下在本文中,我们介绍一种基于多约束条件的 霍夫变换 检 测 车 道 的 算 法。 首 先, 通 过 文 献 [12] 所 提 出 的算法来提 取 感 兴 趣 区 域 (ROI)。 传 统 的 方 法 是 用 Canny 算子提取边缘信息,然 后 通 过 将 边 缘 信 息 映 射 到 Hough 空 间来找到最佳的拟合直线。这严重依赖于原始图像的边缘 信息。一旦路面上出现裂缝和阴影,该方法的准确性可能 会下 降, 本 文 从 原 始 RGB 图 像 的 每 个 颜 色 通 道 获 取 信 息, 改变 RGB 的3个分量权重 来 灰 度 化 图 像。此 外,我 们 对 图 像提取的二值图提出几个约束条件,消除了大量噪声,接
基于级联霍夫变换的车道线快速检测算法

收稿日期:2020-03-09 修回日期:2020-07-13基金项目:国家中长期科技发展规划02科技重大专项(2016ZX 02301003-004-007);天津市自然科学基金(17JCTPJC 54500)作者简介:朱鸿宇(1995-),男,硕士研究生,研究方向为图像处理等;通信作者:杨 帆(1966-),男,教授,博导,研究方向为计算机视觉等㊂基于级联霍夫变换的车道线快速检测算法朱鸿宇,杨 帆,高晓倩,李学娇(河北工业大学电子信息工程学院,天津300401)摘 要:车道线检测是智能辅助驾驶算法中的核心算法之一㊂为了解决基于传统霍夫变换的车道线检测算法检测效率低下等问题,提出一种基于级联霍夫变换的快速车道线检测算法㊂该算法首先对视频帧进行ROI 选取㊁滤波㊁边缘检测㊁非极大值抑制等预处理,然后使用基于平行坐标系的映射将原始图像转换到参数空间,完成点到线㊁线到点的映射,接着再使用一次映射,最终实现点到点㊁线到线的映射,以此快速提取车道线消失点,并根据消失点位置扫描实际车道线,实现车道线的提取㊂该算法在点的映射过程中,坐标值始终是线性变换,克服了传统霍夫变换在映射过程时需对每一个点进行极坐标转换的缺点,计算更简单,运算效率更高㊂仿真实验表明,文中提出的改进算法比传统霍夫变换运算速度提高了31%,准确率提高了6.2%,检测效果有明显提高,可广泛应用于智能辅助驾驶中㊂关键词:车道线检测;Sobel 算子;霍夫变换;平行坐标系;最小二乘法中图分类号:TP 301.6 文献标识码:A 文章编号:1673-629X (2021)01-0088-06doi :10.3969/j.issn.1673-629X.2021.01.016A Fast Lane Detection Algorithm Based on Cascade Hough TransformZHU Hong -yu ,YANG Fan ,GAO Xiao -qian ,LI Xue -jiao(School of Electronics and Information Engineering ,Hebei University of Technology ,Tianjin 300401,China )Abstract :Lane line detection is one of the core algorithms in the intelligent assisted driving algorithm.In order to solve the problem of low detection efficiency of the traditional lane line detection algorithm based on the Hough transform ,we propose a fast lane line detection algorithm based on the cascade Hough transform.The algorithm first performs ROI selection ,filtering ,edge detection ,non -maximum suppression on video frames ,and then uses the mapping based on the parallel coordinate system to convert the original image to the parameter space for completion of the point -to -line ,line -to -point mapping.And then the mapping is used again to finally achieve point -to -point and line -to -line mapping ,so as to quickly extract the vanishing points of the lane line and scan the actual lane line accordingto the vanishing point position to achieve the lane line extraction.In the point mapping process ,the coordinate value is always a linear transformation ,which overcomes the shortcomings of traditional Hough transform that requires polar coordinate transformation for each point during the mapping process.The calculation is simpler and the operation efficiency is higher.Simulation experiments show that the improved algorithm proposed is 31%faster than the traditional Hough transform and has an accuracy rate of 6.2%.The detection effect is significantly improved ,which can be widely used in intelligent assisted driving.Key words :lane line detection ;Sobel operator ;Hough transform ;parallel coordinate system ;least square method0 引 言车道线检测是智能驾驶领域的核心功能之一,也是很多后续识别算法的基础[1],其识别效果很大程度上决定了整个智能驾驶算法的最终效果㊂近年来,国内外关于车道线检测算法的研究日渐深入,文献[2]采用了传统霍夫变换搭配改进的Canny 边缘检测算法,使用迭代算法来计算最优阈值,进而对二值图像进行边缘检测㊂文献[3]采用光流法来进行快速车道线检测,通过对关键特征点的位置进行预估,缩小ROI区域,进而降低算法运算量㊂文献[4]采用Canny 边缘检测搭配改进的概率霍夫变换算法提取直线,最终拟合还原出原始车道线㊂文献[5]通过逆透视的方法消除车道线远近变化,得到若干组平行的车道线,再通过高斯滤波消除噪声,结合霍夫变换提取车道线,并引入RANSAC 进行拟合㊂目前这些方法检测精度都能达到基本要求,但都存在检测效率不高㊁难以满足实际需求等问题㊂由于传统霍夫变换算法坐标转换复杂,计算量较第31卷 第1期2021年1月 计算机技术与发展COMPUTER TECHNOLOGY AND DEVELOPMENT Vol.31 No.1Jan. 2021大,无法同时兼顾实时性和准确性的要求,该文采用一种改进后的基于级联霍夫变换的直线检测算法用于车道线的检测工作㊂首先对图像传感器采集来的视频帧序列进行ROI选取㊁滤波㊁边缘检测和非极大值抑制等预处理,然后采用改进后的直线检测算法进行车道线消失点的定位,并基于消失点的位置向下遍历所有符合要求的点,最后使用最小二乘法对这些点进行拟合,完成车道线检测㊂1 视频帧预处理在辅助驾驶系统中,算法的实时性与准确性同等重要,因为车辆在高速行驶时,如果由于计算量过大而无法保证实时的检测,可能无法对突发情况进行快速处理[6]㊂因此需要对视频帧进行预处理,仅保留在后续算法中必要的图像信息㊂1.1 图像灰度化从相机传感器中采集到的彩色图像一般包含了R (红色)㊁G(绿色)㊁B(蓝色)三个通道的深度信息,每个通道的取值在0至255之间,人眼所看到的所有颜色均可由这三种通道的颜色按照不同的比例搭配得到,行车道路上的车道线一般由黄色和白色两种构成,其RGB分量分别为(255,255,0)和(255,255,255)㊂而算法在针对彩色图像进行处理时,要对这三个通道进行依次处理,时间开销将会很大,为了提高运算效率,往往将由RGB三个通道组成的彩色图像转化为单通道的灰度图像㊂该文选用加权平均法进行灰度化运算㊂人眼对绿色最敏感,其次是红色,而对蓝色最不敏感,对三通道的权重分别定为红色为0.299,绿色为0.587,蓝色为0.114,以此加权得到的灰度值最接近人眼看到的实际感觉㊂公式如下:f(i,j)=0.299R(i,j)+0.587G(i,j)+0.114B(i,j)(1)1.2 ROI区域选取由先验知识可知,待检测的车道线信息往往出现在图像的中下方,因此经由采集设备取得的图像很大一部分是可以去除的,例如天空㊁道路两侧的山峰㊁树木和楼房等,这些环境因素对判断车道线并无作用,选取合适的ROI区域可以极大地降低算法运算量,提升运算速度,保证检测系统的实时性㊂当相机传感器固定安装在车辆上后,其能检测到的视野范围就固定不变了,因此划分的感兴趣区的下边界应当处于视野前方某个固定的位置,比如前车盖的上方㊂对于相机采样到的道路环境图像来说,天空区域相对路面区域灰度值总是整体偏大而灰度变化相对较小,在两个区域的交界处也就是地平线附近,灰度值会发生明显突变㊂根据这个特点可以使用行灰度值统计的方法动态划定感兴趣区的上边界位置,如图1所示,随着行驶环境不同,感兴趣区的边界也会随之改变㊂图1 感兴趣区域划分从图1可以看出,基于行灰度均值的动态感兴趣区划分相比于固定比值的感兴趣区更加灵活,提高了运算效率,同时,更多无关因素的去除也减少了后续检测过程中的干扰噪声,提高了检测的准确度㊂1.3 图像下采样图像下采样的原理便是将一张原本分辨率为m×n的图像进行s倍缩放,最终得到一张分辨率为(m/s)×(n/s)的图像,其目的是为了滤除原图像中较为丰富的冗余信息,尽量只保留目标车道线和车辆的整体形状㊁大小等主要信息,降低计算机后续处理的负荷,提升运行速率㊂该文采用基于高斯金字塔的下采样方法[7],通过对原始图像进行高斯滤波并删除偶数行和列,得到一层新的图像,将此图像作为新的输入,不断重复滤波和删除偶数列这个过程,便得到了若干张不同分辨率的图像㊂算法如式(2)所示:Gn+1(i,j)=∑2m=-2∑2n=-2w(m,n)G n(2i+m,2j+n)(2) 1.4 边缘检测由于图像采集设备及环境因素的影响,实际采集到的图像会有些噪声干扰点,这些噪点的存在会降低图像质量,可能会对需要提取的车道有效信息产生干扰㊂中值滤波是一种非线性滤波,它的原理是选取一个窗口S,在整幅图像上从左到右,从上到下滑动,滑动过程中,窗口S所框选的范围可确定一个邻域,在该邻域内所有像素点的灰度值进行从小到大的排列,取其中值作为该像素点的灰度值㊂由于其原理特性,中值滤波在滤除椒盐噪声方面效果极佳,同时对图像边缘的保护效果较好,该文采用这种滤波算法对车道线图像进行滤波处理㊂㊃98㊃ 第1期 朱鸿宇等:基于级联霍夫变换的车道线快速检测算法在车道线提取中,车道线的形状特征是需要关注的重点,通过判断图像中存在的线段长度㊁间隔及方向等特征规律,即可判断车道线所在位置㊂经典的边缘检测算子有Canny 算子[8]㊁Sobel 算子[9]㊁Robert 算子㊁Prewitt 算子等,不同算子在针对各类不同场景下有着各自的优缺点㊂该文采用Sobel 算子的边缘提取方法,由于提取出的边缘信息存在梯度变化,因此显示出来的边缘存在一定的宽度,会给后续运算造成额外运算量,使用非极大值抑制将提取出的梯度信息的局部最大值找出并将其他非极大值滤除,便可将图像边缘处理成单个像素宽度[10]㊂图2为边缘检测和非极大值抑制效果图㊂图2 图像预处理效果图2 基于级联霍夫变换的消失点提取经过前述操作,得到了包含部分环境干扰噪声的车道线边缘信息㊂一种经典的车道线检测方案是霍夫变换,原理是将原始图像中每一个待检测点的坐标映射到参数空间,然后基于一定的约束条件进行投票,筛选出的点可认定为处于同一直线上㊂霍夫变换的抗噪性及鲁棒性比较强[11],直线检测效果较理想,但由于在参数空间的映射过程中,需要对每个待检测点进行一次极坐标转换,因此算法运算量很大,很难达到实际行车环境的实时性要求㊂对此,该文提出一种使用平行坐标系映射[12]的级联霍夫变换直线检测方案,这种算法在参数空间的映射过程中坐标值变化为线性变换,所以运算量相较传统的霍夫变换更低㊂2.1 平行坐标系映射对于提取到的车道线边缘信息,通过对每一个特征点的行列信息进行记录,将其标注为(x i ,y i )㊂在二维空间绘制两条平行线,分别标注为X 1轴和X 2轴,平行线之间的宽度设定为d ,对于每个特征点(x i ,y i ),将x i 标注在X 1轴上,y i 标注在X 2轴上,并做一条过这两点的直线㊂至此便将一个笛卡尔坐标系上的坐标点,转化为了平行坐标轴上的一条直线㊂为方便直线公式表达,将平行坐标轴表示在笛卡尔坐标系下,其中笛卡尔坐标系的Y 轴与X 1轴重合,X 轴与过X 1轴零点的垂线重合,映射后的(x i ,y i )便转换成了一条过(0,y i )和(d ,y i )的直线L ,其方程为y =x (y i -x i )/d +x i ㊂坐标点在平行坐标系下的性质:任取在笛卡尔坐标系上共线的三点(x 1,y 1)㊁(x 2,y 2)㊁(x 3,y 3),其共线的直线方程为y =k 1x +b 1,将它们映射到平行坐标轴上,直线方程L i 为y =x (y i -x i )/d +x i ,i =1,2,3㊂因此,联立L 1和L 2方程可求得两条直线的交点坐标为(d 1/(1-k 1),b 1/(1-k 1)),同时联立L 1和L 3的方程可得交点也为(d 1/(1-k 1),b 1/(1-k 1)),即L 1㊁L 2和L 3交于同一点㊂由此可得一个结论,在笛卡尔坐标系上共线的三点,投影到平行坐标系上所对应的三条直线必相交于一点,即直线映射到平行坐标系上会变为一点,这个结论可以为将平行坐标系引入直线检测算法提供理论依据㊂当待检测的直线斜率小于0时,映射到平行坐标系上所形成的直线段不会在X 1轴和X 2轴之间形成交点,根据k 值的不同,这个交点可能存在于X 1轴左侧很远的地方,不利于后面的计算㊂为了解决这个问题,在X 1轴左侧距离为d 的地方引入一个X 0轴,如图3所示㊂在该轴上标记-y i 值,连接X 0以及X 1轴的点,X 0与X 1轴之间记为T 域,X 1与X 2轴之间记为S 域㊂由于将原始像素点的纵坐标值均取反,不会改变这些点共线的性质,因此映射到平行坐标系后仍相交于一点这一结论不会改变㊂此时当直线斜率大于0时,它们在平行坐标系下的映射直线将在X 0和X 1轴之间产生交点,坐标为(-d 1/(1+k 1),-b 1/(1+k 1))㊂图3 平行坐标轴下的共线点2.2 级联霍夫变换在对待检测图像进行基于平行坐标系的坐标映射后,即实现了原始图像中点到线的转换,基于投票机制找出通过直线最多的交点,便可对应找出原始图像中存在的直线㊂考虑到环境因素的影响,待检测图像中可能会存在一些非车道线区域的干扰直线,需要通过消失点的约束对其进行筛选㊂该文提出一种基于平行坐标系映射的级联霍夫变换算法检测车道线的消失㊃09㊃ 计算机技术与发展 第31卷点㊂所谓级联,即连续做两次霍夫变换,单次霍夫变换的映射规律是点转换为线,线转换为点,则做两次霍夫变换的结果就变成了点转化为点,线转化为线㊂为更准确地表示映射后的点在平行坐标系上的表示,该文采取齐次坐标的表示法,以[x,y,w]来表示平行坐标系中的点,(a,b,c)来表示笛卡尔坐标系下的对应直线ax+by+c=0,则在笛卡尔坐标系到平行坐标系S域的映射过程中,点与线的映射关系如下: S pl([x,y,w])=(-x+y,-dw,dx)(3) S ld((a,b,c))=[db,-c,a+b](4) T域的映射过程中,点与线的映射关系为:T pd([x,y,w])=(-x+y,-dw,-dx)(5) T ld((a,b,c))=[db,-c,-b](6)其中,d表示平行坐标系之间的间距,w表示齐次系数,p和l分别表示从点到线的映射还是线到点的映射㊂解析了单次映射变换的转换关系后,引入第二次映射变换,级联变换结束后,线到点的映射公式如下所示:SS pdD([x,y,w])=(S l D㊃S p d)([x,y,w])=[-dDw,-dx,-x+y-dw](7)ST ldD([x,y,w])=(S l D㊃T p d)([x,y,w])=[-dDw,-dx,-x+y+dw](8)TS pdD([x,y,w])=(T l D㊃S p d)(x,y,w)=[-dDw,-dx,x+y-dw](9)TT pdD([x,y,w])=(T l D㊃T p d)([x,y,w])=[-dDw,-dx,x+y+dw](10)由上式可以看出,连续经过两次映射变换后,原始图像中的点会经过点到线,线再到点的映射过程,最终在第二个参数空间仍表示为一个点,如图4所示㊂图4 级联霍夫变换示意图 这个性质可以引入车道线消失点的检测过程中㊂一般在结构化道路上,车道线是相互平行延伸的,而由于透视的原因,相机采集到的图像往往呈现一种近大远小的感觉,车道线的延伸方向会相交于一点,这一点便被称为消失点㊂2.3 消失点检测由于前面提取出了包含车道线边缘信息的预处理图像,这些边缘信息的像素点整体上呈现共线的特征,其延长线会相交于消失点,虽然在原始图像中无法直接确定消失点的位置,但对其使用级联霍夫变换,使其映射到一个新的参数空间后,便可基于投票的方式快速搜索到消失点,进而推算出其在原始图像中的位置,反推过程的表达式如下所示㊂[x,y,w]o→[-dDw,-dx,sgn(xy)x+y+sgn(y)dw]p(11)[x,y,w]p→[Dy,sgn(x)dx+sgn(y)Dy-dDw,x]o(12)其中,下标o表示该点在笛卡尔坐标系上,下标p表示该点在平行坐标系上㊂2.4 基于消失点位置的车道线检测霍夫变换检测车道线的传统做法是依照直线检测结果对所有直线段做拟合,然后再根据直线间存在的交点位置投票选出消失点,再通过消失点约束筛选出实际车道线位置[13]㊂然而该文通过改进后的级联霍夫变换算法已经得到了消失点位置,可以通过更为简单的做法反推出车道线位置,可显著降低算法的运算量㊂车道线的位置一般位于消失点下方,以消失点下侧作为感兴趣区进行扫描,具体检测步骤如下:(1)由前叙步骤得到消失点位置V(x v,y v),而消失点下方的各待检测点灰度值将其表示为p i(x i,y i),构造累加器S(θ)并置为0;(2)遍历消失点下方各点,当存在p i(x i,y i)=255时,求出该点与消失点连线的倾角θ,并在相应的累加器中加一,θ的计算如下式所示:θ=arctan(y i-y vxi-xv)(13)(3)设置一个阈值Ts,当存在S(θ)>Ts时,过消㊃19㊃ 第1期 朱鸿宇等:基于级联霍夫变换的车道线快速检测算法失点且倾角为θ的直线即为车道线所在直线㊂由于实际行车环境中的车道线信息可能存在遮挡㊁磨损和断连的情况,为避免漏检,给倾角设定一个误差范围±1°,在进行阈值判别时,实际将比较S (θ)+S (θ')与Ts 的值,其中θ'∈[θ-1,θ+1]㊂由于车道线存在的角度范围并不大,通过约束检测范围可以排除掉一些干扰直线[14],比如路沿和围栏等图像边缘误检出的直线,θ的最终取值范围定在30°~150°之间㊂2.5 最小二乘法拟合车道线虽然根据消失点位置直接过其点画出倾角为θ的直线可以大致确定车道线位置,但为更精确地提取车道线位置,提高算法的鲁棒性,该文采用最小二乘法拟合的方式画出车道线[15]㊂设目标曲线方程如下式所示:g (x )=a 0+a 1x +a 2x + +a n x n=∑n i =0a ixj i(14)取y i =f (x i ),E i =f (x )-g (x ),则E i 可用下式的形式表示:E i =f (x )-g (x )=y i -g (x i )=y i -∑n j =0a jx j i,i =1,2, ,n(15)其中,E i 表示理论值与实际值的误差,当误差的平方和最小时,拟合效果最好,即式(16)应取最小值:Ψ=∑n i =1E2i =∑n i =1(yi-∑n j =0a ix j i)2(16)则计算a 0,a 1, ,a n 的方式如下:a n a n -1︙a éëêêêêêùûúúúúú1=n∑n i =1xi∑ni =1xni∑n i =1x i ∑ni =1x2i∑n i =1x n +1i ︙︙︙︙∑ni =1x n i ∑ni =1xn +1i∑ni =1x 2n éëêêêêêêêêêùûúúúúúúúúúi =∑ni =1y i ∑n i =1x i y i ︙∑n i =1x ni y éëêêêêêêêêêùûúúúúúúúúúi (17)基于上述原理,本节于前叙步骤中已经筛选出符合倾角θ要求的点(x i ,y i )(i =1,2, ,n ),对这些点以三次曲线模型拟合车道线,得到最终车道线检测结果㊂3 实验结果及分析该算法使用的仿真平台为Visual Studio 2019配合OpenCV 3.41,硬件平台采用Intel (R )Core (TM )i 7-6700HQ CPU @2.60GHz 2.60GHz ㊁GTX 965M 和8G 内存㊂为保证算法测试的客观性与准确性,选用的测试数据均采集自公开的TuSimple 车道线数据集与ROMA 车道线数据集,考虑到真实行车道路情况的多样性,该文选取了多种结构化道路环境以及多种光照及天气情况下的样本对车道线算法进行了实验㊂图5展示了几组应用文中算法检测到的车道线结果,其中第一组图像为光照良好情况下的车道检测结果,后两组为极端光照情况下的车道线检测结果,第二组为白天逆光环境的采集样本,第三组为桥洞下弱光环境的采集样本㊂每组图片从左到右分别为预处理结果和车道线检测效果㊂通过观察预处理效果和车道检测效果可以看出,该车道检测算法在各种不同的光照环境下均拥有较为稳定的检测效果㊂图5 不同光照环境下车道线检测实验结果为进一步评估文中所提算法的整体表现,以文中算法为实验组,传统霍夫变换直线提取算法作为参照组,选用取自TuSimple 车道线数据集的真实环境行车图片用于车道线的识别,包括直行路段㊁弯道路段㊁车道线残缺路段等实际行车环境中可能遇到的典型情况合计800帧并统一处理为640×360分辨率㊂首先针对所有待检测图像使用相同的预处理算法得到道路车道线的边缘信息图像,再分别采用传统霍夫变换和文中改进算法对这些边缘信息图像进行车道线位置检测,比较两种算法处理完所有待检测图像的耗时长短以及检测准确度的区别㊂为客观统计针对每一帧图像的检测中两种算法的准确度,设定如下检测标准:取实际车道线L 1的上下端点a 和b ,同时取算法检测出的车道线L 2中平行于a 与b 的点,距两点的距离分别为d 1和d 2㊂若满足|d 1+d 2|≤D ,其中D 为车道线实际宽度,则认为本次车道线检测为准确的㊂传统霍夫变换算法与文中改进算法部分对比如图6所示㊂通过对比传统霍夫变换和文中改进算法的提取效果,可以发现在一些车道线较为清晰的直线道路上,传统算法和文中算法均可成功检测出车道线,但在一些弯道区域,传统霍夫变换检测出的结果无法准确贴合㊃29㊃ 计算机技术与发展 第31卷实际车道线的位置,而文中算法仍可以做到较准确的识别㊂与此同时,由于级联霍夫变换是点到点㊁线到线的映射,原始图像中的点映射到参数空间时坐标值变化为线性变换,而传统霍夫变换在映射过程中针对每个点坐标都要进行一次极坐标变换,运算更复杂,所以文中的改进算法在实时性表现上也更优于传统霍夫变换,效果对比如表1所示㊂图6 传统霍夫变换与文中算法效果对比表1 传统霍夫变换算法与文中算法的准确性和实时性对比项目帧数/f 正确帧数/f 准确率/%耗费时间/s 算法速度/f ㊃s -1传统霍夫变换算法80070588.13522.9文中改进算法80075494.32630.1 由表1可以看出,在对取自TuSimple 车道线数据集中的800张测试图像进行检测后,文中算法在实时性和准确性方面均优于传统的霍夫变换算法,其中准确度提升了6.2%,算法速度提升了31%㊂4摇结束语通过对传统车道线提取算法进行改进,替换掉其中的霍夫变换步骤,改为映射过程更为简单的平行坐标系映射,然后采用级联的方式进行消失点的提取㊂由于在连续两次映射后,原始图像的点与第二次参数空间映射后点的坐标属于线性变换关系,相比传统霍夫变换的极坐标映射计算量更小,算法复杂度更低,同时基于消失点位置的直线检测方法也可有效降低误检率㊂实验结果表明,该算法相比传统检测方案拥有更好的准确性和实效性㊂该算法仍有发展的潜力,在暗光条件和大弯道等场景的检测有进一步优化的空间,在将来的研究中,这会是持续改进的侧重点之一㊂参考文献:[1] 王荣本,郭 烈,金立生,等.智能车辆安全辅助驾驶技术研究近况[J ].公路交通科技,2007,24(7):107-111.[2] 石金虎,金 辉,王 迪.基于单目视觉的智能车车道线识别算法[J ].汽车实用技术,2019(19):28-31.[3] 庄博阳,段建民,郑榜贵,等.基于光流法的快速车道线识别算法研究[J ].计算机测量与控制,2019,27(9):146-150.[4] 邱 东,翁 蒙,杨宏韬.基于改进概率霍夫变换的车道线快速检测方法[J ].计算机技术与发展,2020,30(5):43-48.[5] ALY M.Real time detection of lane markers in urban streets[C ]//2008IEEE intelligent vehicles symposium.Eind⁃hoven :IEEE ,2008:7-12.[6] ZHU S ,WANG J ,YU T ,et al.A method of lane detectionand tracking for expressway based on RANSAC [C ]//20172nd international conference on image ,vision and computing (ICIVC ).Chengdu :IEEE ,2017:62-66.[7] 谢耀华.海量影像存储与管理关键技术研究[D ].长沙:国防科学技术大学,2009.[8] 赵 芳,周旺辉,陈岳涛,等.改进的Canny 算子在裂缝检测中的应用[J ].电子测量技术,2018,41(20):107-111.[9] WU P C ,CHANG C Y ,LIN C ne -mark extraction forautomobiles under complex conditions [J ].Pattern Recogni⁃tion ,2014,47(8):2756-2767.[10]SONG Y ,PAN Q ,GAO L ,et al.Improved non -maximumsuppression for object detection using harmony search algo⁃rithm [J ].Applied Soft Computing ,2019,81:105478.[11]SON J ,YOO H ,KIM S ,et al.Real -time illumination invari⁃ant lane detection for lane departure warning system [J ].Ex⁃pert Systems with Applications ,2015,42(4):1816-1824.[12]DUBSKÁM ,HEROUT A.Real projective plane mapping fordetection of orthogonal vanishing points [C ]//Proceedings of the British machine vision conference.Bristol :BMVC ,2013:90.1-90.11.[13]ZHANG G ,ZHENG N ,CUI C ,et al.An efficient road detec⁃tion method in noisy urban environment [C ]//2009IEEE in⁃telligent vehicles symposium.Xi ’an :IEEE ,2009:556-561.[14]吴 彬,刘 翔,尚岩峰,等.车道线快速检测算法及其应用[J ].传感器与微系统,2019,38(11):157-160.[15]LI Qingquan ,CHEN Long ,LI Ming ,et al.A sensor -fusiondrivable -region and lane -detection system for autonomousvehicle navigation in challenging road scenarios [J ].IEEE Transactions on Vehicular Technology ,2014,63(2):540-555.㊃39㊃ 第1期 朱鸿宇等:基于级联霍夫变换的车道线快速检测算法。
基于改进Hough变换的车道线检测

10.16638/ki.1671-7988.2021.07.006基于改进Hough变换的车道线检测*李后隆,马骊溟,钟林伟(长安大学汽车学院,陕西西安710064)摘要:针对车道线检测中存在的诸多问题,在道路图像预处理的基础上,对Canny算子中的双阈值选取进行改进,能够自适应精确提取车道线边缘特征,并利用带极角约束的Hough变换完成直线检测。
算法能够在不同道路环境中准确检测车道线标识,降低光照等因素对车道线检测结果的影响。
关键词:车道线检测;图像预处理;Canny算子;改进Hough变换中图分类号:U491.2+23 文献标识码:A 文章编号:1671-7988(2021)07-16-03Lane Detection Based on improved Hough Transform*Li Houlong, Ma Liming, Zhong Linwei( School of Automobile, Chang'an University, Shaanxi Xi'an 710064)Abstract: Aiming at many problems existing in lane detection. Fristly based on image preprocessing; Then extract the edge features of lane line by improving the double threshold selection of Canny operator; Finally, complete straight line detection by use the Hough transform with polar angle constraint and get the lane line detection result. The algorithm can accurately detect lane markings in different road environments and reduce the influence of illumination and other factors on lane detection results.Keywords: Lane detection; Image preprocessing; Canny operator; Improved hough transformCLC NO.: U491.2+23 Document Code: A Article ID: 1671-7988(2021)07-16-03前言车道线标志是约束车辆行驶的最基本因素,因此准确快速地进行车道线检测是智能车辆的核心目标。
复杂道路条件下的车道线检测算法

2020⁃12⁃31计算机应用,Journal of Computer Applications2020,40(S2):166-172ISSN 1001⁃9081CODEN JYIIDU http ://复杂道路条件下的车道线检测算法姚洪涛,张海萍*,郭智慧(长春理工大学计算机科学技术学院,长春130000)(∗通信作者电子邮箱782855470@ )摘要:针对在复杂道路条件下基于滑动窗口的车道线检测算法易发生误检、漏检的现象,提出了一种改进算法。
该算法在图像预处理方面使用了多阈值过滤方法,主要通过结合梯度阈值过滤和颜色空间阈值过滤的优势,充分提取道路图像中车道线的信息,消除了由复杂路面引起的噪声干扰;在车道线拟合方面,使用了基于动态自适应感兴趣区域的车道线跟踪方法,该方法主要利用前一帧的车道线信息自动调整感兴趣区域的位置及大小,有效地解决了基于滑动窗口的车道线检测算法在复杂行车环境下容易出现漏检、误检的问题。
最后通过与基于滑动窗口和Hough 变换的车道线检测算法进行对比实验,结果显示:改进后的车道线检测算法在准确性与实时性方面具有明显优势。
关键词:车道线检测;多阈值过滤;动态自适应;感兴趣区域;车道线跟踪中图分类号:TP391.41文献标志码:ALane detection algorithm under complex road conditionsYAO Hongtao ,ZHANG Haiping *,GUO Zhihui(College of Computer Science and Technology ,Changchun University of Science and Technology ,Changchun Jilin 130000,China )Abstract:Aiming at the phenomenon that the lane detection algorithm based on sliding window is prone to falsedetection and missed detection under complex road conditions ,an improved algorithm was proposed.In the aspect of image preprocessing ,a multi -threshold filtering method was used ,which mainly combined the advantages of gradient threshold and color space threshold to fully extract the lane information from road images ,the noise interference caused by complex roadsurfaces was eliminated.In terms of lane fitting ,a lane tracking method based on dynamically adaptive regions of interest was used.In this method ,the lane information of the previous frame was mainly used to automatically adjust the position and size of the region of interest ,which effectively solved the problem that the lane detection algorithm based on sliding window was prone to missed detection or false detection in complex driving environment.Finally ,a comparative experiment with thelane detection algorithm based on sliding window and Hough transform shows that the improved lane detection algorithm has obvious advantages in accuracy and real -time.Key words:lane detection;multi -threshold filtering;dynamic adaptation;Region of Interest (RoI);lane tracking引言随着汽车普及程度的增高,道路交通事故频发、交通拥堵加剧等问题日益突出。
复杂交通场景下车道线实时检测算法设计

复杂交通场景下车道线实时检测算法设计随着城市化的深入,车辆数量的不断增加以及人们的出行需求的不断提高,交通场景变得越来越复杂。
在这样的场景下,车道线的实时检测非常重要,不仅能够保证交通安全,还可以为自动驾驶提供重要的依据。
因此,本文将介绍如何设计一款复杂交通场景下的车道线实时检测算法。
1. 确定需要检测的车道线类型首先,我们需要明确需要检测的车道线类型,因为不同类型的车道线需要使用不同的检测方法。
具体而言,根据车道线的线型和颜色,可以将其分为虚线、实线、双实线、箭头线等几种。
在确定需要检测的车道线类型后,需要收集各种类型的车道线的图片样本,作为后续训练和验证的数据集。
2. 构建车道线检测模型车道线检测模型的构建可以采用深度学习的方法,目前常用的模型有卷积神经网络(CNN)、循环神经网络(RNN)和卷积循环神经网络(CRNN)等。
在构建模型之前,需要进行数据预处理,包括对图片进行裁剪、缩放和旋转等操作,以及对车道线进行像素级标注。
然后,将预处理后的图片和车道线标注作为输入,通过模型训练和验证,得到一个精度较高的车道线检测模型。
3. 实时检测算法设计在实际应用中,需要针对复杂交通场景下的车道线进行实时检测。
一种常用的实时检测算法是基于卷积神经网络的快速目标检测算法YOLO(You Only Look Once)。
该算法将一张图像分成多个网格,每个网格负责预测一个物体的位置、大小和置信度等。
对于车道线检测,可以将车道线视为一种特定的物体,通过训练得到车道线的位置和置信度信息,并采用非极大值抑制(NMS)算法进行筛选,得到最终的车道线检测结果。
4. 优化算法性能为了进一步提高车道线检测算法的性能,可以采用以下几种优化方法:(1)数据增强:通过对原始数据集进行随机裁剪、旋转和镜像等操作,增加数据的多样性,避免过拟合,提高模型的鲁棒性。
(2)模型压缩:通过剪枝、量化等方法减小模型参数量,降低模型存储和计算的成本,提高算法效率。
复杂交通场景下车道线实时检测算法设计

复杂交通场景下车道线实时检测算法设计随着城市化进程的不断推进和交通工具的普及,人们的出行方式也日益多样化。
然而,复杂交通场景下的车辆行驶安全问题,始终是人们关注的热点。
为此,车道线实时检测算法应运而生。
车道线实时检测算法的设计,需要考虑到道路情况的多样性,包括车道数目、曲线形状、路面状况等;同时还需考虑到各种天气、光照等自然因素对行车视野的影响。
为了应对这些挑战,我们可以采用多种技术手段,如卷积神经网络、图像分割等,以提高车道线检测的准确性和可靠性。
在实际应用中,车道线实时检测算法的设计也需要结合实际场景进行优化。
例如,在高速公路上行驶时,车辆行驶速度较快,需要快速且准确地检测车道线;而在城市中心区域,路面情况复杂,行人、自行车等非机动车辆较多,需要对车道线检测算法进行适当的调整。
总之,车道线实时检测算法的设计涉及到多种技术和实际应用情况的综合考虑,只有不断优化和完善,才能更好地保障人们的行车安全。
- 1 -。
一种基于相位一致性霍夫变换的磨损车道线检测方法[发明专利]
![一种基于相位一致性霍夫变换的磨损车道线检测方法[发明专利]](https://img.taocdn.com/s3/m/cdbc64441fd9ad51f01dc281e53a580216fc50fd.png)
专利名称:一种基于相位一致性霍夫变换的磨损车道线检测方法
专利类型:发明专利
发明人:周丽军,孙贝,周晓旭,吴宏涛,刘博,孟颖,薛春明,段英杰,岳鹏程,牛秉青,谢昊良
申请号:CN202111648609.6
申请日:20211229
公开号:CN114419582A
公开日:
20220429
专利内容由知识产权出版社提供
摘要:本发明公开了一种基于相位一致性霍夫变换的磨损车道线检测方法,其搭建边缘检测平台、信号增强平台、车道线提取平台等。
边缘检测平台通过将拍摄的车道线原始图像经过各模块处理形成边缘检测图像;信号增强平台根据待检测信号的目标分布选择滤波模块形成局部纹理目标信号增强图像;车道线提取平台利用Hough变换方法将增强图像信号映射到Hough空间,调整设定局部阈值,检测车道线直线信息,输出平台显示磨损车道线的检测与识别界面。
本发明采用相位一致性方法对光线明暗的不敏感性与Hough变换对直线检测的鲁棒性,结合滤波增强方法实现了低对比度下的磨损车道线自动识别,解决了现有车道线检测技术中轮廓提取不完整、识别准确度受光线影响较大的技术问题。
申请人:山西省交通科技研发有限公司
地址:030006 山西省太原市示范区经济技术园区武洛街27号
国籍:CN
代理机构:北京太兆天元知识产权代理有限责任公司
代理人:易卫
更多信息请下载全文后查看。
用概率霍夫变换算对车道改变的检测
第26卷第5期杭州电子科技大学学报Vol.26,No.5 2006年10月Jo urnal of Ha ngzhou Dianzi Uni versi ty Oct.2006基于改进概率霍夫变换算法的车道检测方法研究戴渊明1,张 翔1,王再富2(1.杭州电子科技大学计算机应用技术研究所,浙江杭州310018;2.杭州电子科技大学科技处,浙江杭州310018)收稿日期:2006-09-30基金项目:浙江省科技厅重点科研国际合作项目(2006C24002)作者简介:戴渊明(1982-),男,浙江湖州人,在读研究生,计算机应用技术.摘要:为了提高车道检测的实时性,提出了一种基于改进的概率霍夫变换算法的车道检测方法。
改进的概率霍夫变换算法的特点是用设定累加器阈值的方法减少了检测直线的运算量,通过随机取点映射到参数空间使最长直线被最早检测到的概率最大,比现有车道检测方法中普遍采用的标准霍夫变换算法更具实时性。
实际路面图像的对比处理结果证明了该检测方法的实时性、精确性和鲁棒性。
关键词:车道检测;霍夫变换;实时中图分类号:TN391.41 文献标识码:A 文章编号:1001-9146(2006)05-0091-050 引 言车道检测是智能车辆计算机视觉系统中的关键技术之一,它提供了车辆与车道位置关系的信息,以此可确定车辆在道路上可行驶的区域。
一种高性能的车道检测方法须同时满足实时性,精确性,鲁棒性3个要求,但3者又是相互矛盾的.为了得到精确的车道线位置信息并适应道路的各种情况以保证系统的鲁棒性,则检测算法的复杂度和运算时间将会增加,不能很好满足实时性的要求;相反,为满足系统的实时性,需要对检测算法进行简化,往往会牺牲检测的精确性和鲁棒性。
现有的车道检测方法[1,2]普遍采用了标准霍夫变换算法(Standard Hough Transform,SHT),SHT 算法中图像点向参数空间映射的计算复杂度很高,运算开销很大,影响了整个系统的实时性。
基于Hough变换的智能车辆车道线检测_杨全琪
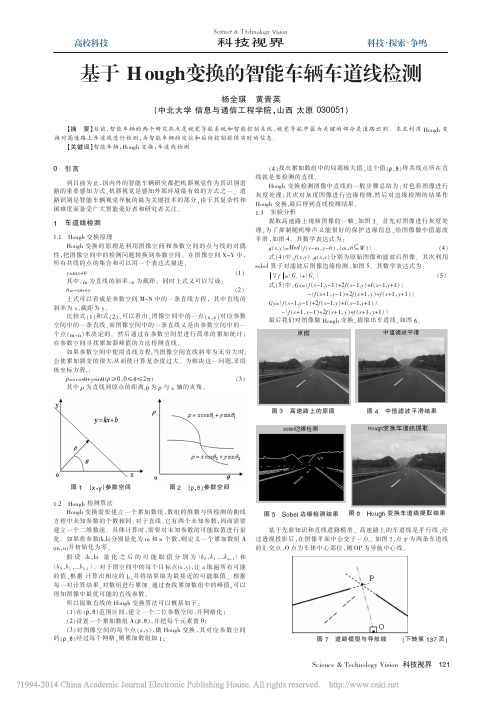
图6Hough变换车道线提取结果0引言到目前为止,国内外的智能车辆研究都把机器视觉作为其识别道路的重要感知方式,机器视觉是感知外部环境最有效的方式之一。
道路识别是智能车辆视觉导航的最为关键技术的部分,由于其复杂性和困难度而备受广大智能爱好者和研究者关注。
1车道线检测1.1Hough 变换原理Hough 变换的原理是利用图像空间和参数空间的点与线的对偶性,把图像空间中的检测问题转换到参数空间。
在图像空间X-Y 中,所有共线的点的集合和可以用一个表达式描述:y =mx +n(1)其中,m 为直线的斜率,n 为截距。
同时上式又可以写成:n =-xm +y(2)上式可以看成是参数空间M-N 中的一条直线方程,其中直线的斜率为x ,截距为y 。
比较式(1)和式(2),可以看出,图像空间中的一点(x ,y )对应参数空间中的一条直线,而图像空间中的一条直线又是由参数空间中的一个点(m ,n )来决定的。
然后通过在参数空间里进行简单的累加统计,在参数空间寻找累加器峰值的方法检测直线。
如果参数空间中使用直线方程,当图像空间直线斜率为无穷大时,会使累加器变的很大,从而使计算复杂度过大。
为解决这一问题,采用极坐标方程,:ρ=x cos θ+y sin θ(ρ≥0,0≤θ≤2π)(3)其中ρ为直线到原点的距离,θ为ρ与x 轴的夹角。
1.2Hough 检测算法Hough 变换需要建立一个累加数组,数组的维数与所检测的曲线方程中未知参数的个数相同。
对于直线,它有两个未知参数,因而需要建立一个二维数组。
具体计算时,需要对未知参数的可能取值进行量化。
如果将参数(k,b)分别量化为m 和n 个数,则定义一个累加数组A (m ,n)并初始化为零。
假设(k ,b)量化之后的可能取值分别为k 0,k 1,...k m -1≤≤和b 0,b 1,...b n -1≤≤。
对于图空间中的每个目标点(x ,y),让a 取遍所有可能的值,根据计算出相应的b ,并将结果取为最接近的可能取值。
基于霍夫变换算法的车载视频车道线检测

基于霍夫变换算法的车载视频车道线检测
李荣彬
【期刊名称】《电脑编程技巧与维护》
【年(卷),期】2024()2
【摘要】基于车载视频监控,围绕车道线检测及车道线模糊或缺失等应用进行研究,并将研究成果应用到道路巡检管理系统中,取得了良好的工程实践应用效果。
采用了霍夫变换检测算法筛选当前车辆行驶所在车道的左右车道线,通过数量检测对车道线缺失进行判断预警。
为了进一步提升应用的可靠性、减少因车辆变道或前方车辆遮挡而导致的车道线缺失误判,研究了车道线偏离和前方障碍物判断预警方法。
以俯瞰视角,对车道线、摄像头成像及车辆姿态进行建模,计算车辆行驶偏移的角度和相对距离,判断车辆偏移情况。
【总页数】4页(P131-134)
【作者】李荣彬
【作者单位】闽南理工学院
【正文语种】中文
【中图分类】U49
【相关文献】
1.基于车道线交点的车载视频稳像算法
2.基于多特征的车载影像车道线检测算法
3.基于级联霍夫变换的车道线快速检测算法
4.基于改进概率霍夫变换的车道线检测与跟踪算法
5.基于改进霍夫变换的车道线检测算法实现
因版权原因,仅展示原文概要,查看原文内容请购买。
基于霍夫变换与最小二乘法的车道线检测方法

基于霍夫变换与最小二乘法的车道线检测方法
廖干洲;曾霞;李龙华
【期刊名称】《机电工程技术》
【年(卷),期】2024(53)4
【摘要】基于传统图像处理方法,利用图像预处理、ROI分割、霍夫变换和最小二乘法等技术进行车道线检测。
对图像进行预处理,图像预处理包括对图像二值化;然后通过高斯滤波对图像进行边缘检测。
为提高执行效率和和提高准确性,使用15°俯视角度下显现的ROI区域进行检测,并利用霍夫变换检测车道线。
通过设置阈值和参数调整,得到车道线的峰值点,并使用最小二乘法拟合直线。
在图像中绘制检测结果,包括车道线和霍夫变换峰值点。
使用该方法,对高速道路、城市道路、省道等3种路线上的5个实验组进行实验,其中高速道路和省道的准确率分别为95%、98%,城市道路的准确率为75%。
结果表明:所提方法在特定环境下能够较为有效地检测车道线,具有较好的鲁棒性和准确性。
【总页数】4页(P111-114)
【作者】廖干洲;曾霞;李龙华
【作者单位】广州应用科技学院
【正文语种】中文
【中图分类】U461.91
【相关文献】
1.基于多约束条件下的霍夫变换车道线检测方法
2.基于方向可调滤波和概率霍夫变换的车道线检测方法
3.基于改进概率霍夫变换的车道线快速检测方法
4.基于概率霍夫变换的快速车道线检测方法
5.基于霍夫变换的农业AGV车道线视觉检测方法
因版权原因,仅展示原文概要,查看原文内容请购买。
基于复杂环境下的车道线识别

基于复杂环境下的车道线识别
范跃文
【期刊名称】《中国新技术新产品》
【年(卷),期】2022()7
【摘要】传统的车道线检测算法主要为直接在图像中进行霍夫(Hough)变换,但这种算法实时性差、计算量大。
该文提出了一种新的基于Hough变换的复杂情况下车道线检测的算法,这个算法能够成功在夜晚、白天、有阴影和车道线磨损不太严重等复杂情况下检测出车道线。
该算法为先对原图像进行处理,即为了减少计算量,该算法设置了感兴趣区域(ROI区域),通过转换颜色空间并扫描图像灰度值划分出有阴影的区域,并对其进行处理,判断出最有可能出现车道线的区域,再进行Hough变换,以检测出车道线。
试验表明,这种算法的实时性更好,能够成功在复杂情况下检测出车道线。
【总页数】3页(P28-30)
【作者】范跃文
【作者单位】北京市政路桥锐诚科技有限公司
【正文语种】中文
【中图分类】U461
【相关文献】
1.复杂环境下道路车道线识别算法的研究
2.一种基于描绘辅助线的对于复杂背景下的星图识别方法
3.基于迁移学习的复杂环境下输电杆塔异常振动识别
4.基于实例
分割的复杂环境车道线检测方法5.复杂环境下基于自适应深度神经网络的鲁棒语音识别
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于霍夫变换的复杂情况下车道线检测作者:吴恩泓来源:《科教导刊·电子版》2019年第11期摘要本文提出了一种新的基于霍夫变换的复杂情况下车道线检测的算法,这个算法能够成功在夜晚,白天,有阴影,车道线磨损不太严重等复杂情况下检测出车道线。
传统的车道线检测算法主要为直接在图像中进行霍夫变换,这种算法实时性差,计算量大。
本文提出的算法将先对原图像进行处理,设置ROI区域减少计算量,转换颜色空间并且扫描图像灰度值划分出有阴影的区域进行处理,最后判断最有可能出现车道线的区域,进行霍夫变换检测出车道线。
经过实验表明,这种算法的实时性更好,能够成功在复杂情况下检测到车道线。
关键词霍夫变换车道线检测复杂情况感兴趣区域中图分类号:TP391.41 文献标识码:A0引言近年来,自动驾驶汽车的概念开始流行,其中如何使汽車成功检测到车道线的算法,在自动驾驶,汽车安全相关应用领域中越来越受到重视。
基于视觉的车道线检测算法是当今自动驾驶汽车的主要研究热点之一。
目前,国内外的许多学者已经提出了相当多的基于视觉的车道线检测算法,而基于视觉的车道线检测算法需要满足实时性,准确性,适用性等要求,因此他们通常采用不同的模型和合适的边缘检测技术来检测车道线,比如其中有直线,曲线,分段切换模型等道路模型以及最小二乘法拟合,Hough变换,改进cany算子,基于小波变换的边缘提取等边缘检测技术,但是这些单一的算法都会因为摄像头因为光线等因素造成的影响而产生非常大的误差,对车道线检测的鲁棒性和准确性都有一定程度的影响,并且Hough变换因为计算量很大,因此会有一定的延迟性,这是在利用Hough变换来检测车道线算法的一个难题。
对于上述所讲到的问题,许多学者采用了改进Hough变换的方法,本文设计了一种结合图像预处理和改进Hough变换的算法,来解决这些问题。
在遇到强光照,弱光照,有树荫等阴影遮挡,车道线磨损的复杂的情况下,该算法能够成功检测到车道线并且实时性很好,准确性很高。
本论文所设计的算法将首先根绝颜色空间分布情况,设置ROI区域以减少计算量,然后进行灰度拉伸等操作尽量去除光照以及阴影等干扰,再进行Hough变换检测出车道线,最后进行判别。
经过实验,该算法能够实现在复杂道路情况下检测出车道线的功能。
1根据情况的复杂给图像分类为了保证光照鲁棒性来进行检测。
本算法将首先根据车载摄像头所采集的图像中的信息来对图像进行分类。
通常来说,光照强度较强的图像,其灰度值变化是比较快的,并且车道线与除了车道线以外的其他图像信息之间的对比度比较大,往往会出现图像中会出现全白的路面。
这会导致图像中有用的信息,比如车道线没有办法检测出来,如图1中(a)所示,其对比度相对于其他的图像来说都是偏大,而为了解决这一类问题,将会对光照强度较强的图像进行对比度的均值化处理,并且采用灰度值均值化的处理能够成功采集到图像中的有用信息。
光照强度较弱的图像,例如夜晚的时候所采集到的图像,其灰度值变换是比较慢的,比较平缓的,在一张图像中灰度值不会发生太剧烈的变换,并且图像中的车道线与其他景物的对比度非常低,很容易将车道线与其他景物进行混淆,导致不能成功检测出车道线。
如图1中的(b)所示,很难在图像中检测到车道线的存在。
在这一类图像中,将会采取增大对比度,进行灰度值拉伸等操作来恢复有用信息车道线在图像中的显示,从而成功检测出车道线。
对于有阴影遮挡住的车道线的图像,因为在这一类的图像中同一条车道线的灰度值是不相等的,并且树荫等阴影也会有边界线,这将导致在进行检测车道线的过程中,不仅将需要检测的车道线检测出来,还会将所不需要检测的阴影边界线检测出来,或者处于阴影中的车道线因为灰度值和对比度的影响从而导致没有办法检测出来等一类后果,如图1中的(c)所示。
在这一类图像中,将会对图像进行扫描,对有阴影的图像进行二值化处理,然后再进行灰度值拉伸操作,去除阴影对图像的影响,再进行车道线的检测。
在本文中将会采取计算整体图像的灰度均值来对图像进行分类。
计算整体图像的灰度均值的计算公式如下:其中P为像素均值,N为像素总数目,p(i)为每个像素的数值。
根据计算我们得到,图1中(a)的像素均值为P=155,图1中(b)的像素均值为P=60,图1中(c)的像素均值为P=140。
根据图像的像素均值能够很好的反映所采集的图像光照强度,因此可首先根据图像的像素均值对图像进行分类,分为白天及夜晚所采集的图像,并在后续中对二者进行不同的处理。
在对图像进行了光照强度的分类之后,需要对图像进行有无阴影遮挡车道线的分类。
针对这个问题,本文所采取的方法是对图像进行颜色空间的识别和处理,继而进行分类。
2图像预处理为了降低图像中的噪声以及消除其他物品对车道线检测的影响,并且减少Hough变换的计算量,我们将首先对图像进行预处理。
2.1根据颜色分布确定车道线所在位置设置ROI区域因为在后续的处理中都将会把BGR颜色空间的图像转换为Gray颜色空间的图像进行处理,所以将首先解决阴影对车道线检测所造成的印象。
在图像处理的过程中,因为车道线总是在图像的下半部分,上半部分的天空及树叶等其他颜色会干扰到图像的处理,所以最开始进行的处理是设置图像的下半部分为ROI区域,仅对此区域进行颜色空间上的处理与划分车道线检测区域。
本文采集的所有图像均为BGR三通道颜色空间的图像,因此选择蓝色分量值的大小作为区分车道线与阴影的依据。
方法主要是对图像进行扫描,从而记录出图像每一行各个像素的蓝色分量值,通过蓝色分量值的大小来判断该像素是否位于车道线内。
为了降低噪声的影响并且减少检测误差,在扫描图像的过程中,将采取每采集五个像素点的蓝色分量值进行均值化处理的方式,采用公式(2)对采集到的蓝色分量进行平滑处理。
其中B(x)为平滑处理后的蓝色分量值,b(x)为平滑处理前的蓝色分量值,x为图像中每一个点的横坐标值。
检测过程如图2所示。
以扫描线经过无阴影遮挡车道线与有阴影遮挡车道线两个时刻进行分析,将得到在扫描线中蓝色分量值的分布示意图,分别如图3,图4所示。
通过分析图3与图4蓝色分量值分布图,可以发现在有阴影遮挡车道线跟无阴影遮挡车道线的两种情况下,蓝色分量值在图像中的分布趋势没有改变,仅仅改变了蓝色分量值数值的大小,因此选定图像中蓝色分量跳变的开始部分与结束部分作为车道线可能存在的区域,设置这个区域为ROI区域并且对此区域进行后续处理。
2.2对光照强度不同的图像进行灰度处理针对光照强度较强的图像,它所存在的问题是车道线与背景的对比度较大,像素灰度值普遍较高,容易导致图像中出现全白的路面。
因此需要对光照强度较大的图像进行灰度均衡化处理。
灰度均衡化实际采用的是直方图均衡化,中心思想是把原始图像的灰度直方图从比较集中的某个区域变成在全部灰度范围内的均匀分布。
直方图均衡化通过用来增加图像的局部对比度,因此这种方法能够在图像背景太强的时候,使目标区域即车道线从背景中脱离出来。
而在直方图均衡化中引入了累计分布函数CDF,其定义为对于连续函数,所有小于等于a 的值,其出频率的和:针对于灰度级从[0,L-1]的图像,则是统计各个灰度级的累计分布概率,灰度值k(0<k<L-1)的累计概率是P(0), P(1),P(2)……P(K)之和。
图像在经过灰度值均衡化操作之后,图像的灰度值范围有一定浮动的空间,更加有利于后面灰度化,阈值化,二值化的处理。
强光照图像经过灰度值均衡化操作后的效果图如图5所示。
针对光照强度较弱的图像,此类图像所存在的问题是车道线与背景的对比度很小,很难将车道线与背景物体区分开,并且夜晚的图像因为光照不足,灰度值普遍偏低,因此需要将弱光照图像进行灰度拉伸处理。
灰度拉伸是通過扩展图像灰度级动态范围来实现的,它可以扩展对应的全部灰度范围,能够对图像感兴趣的地方进行增强,而对图像不感兴趣的部分进行抑制。
而实现灰度拉伸通常采用如下三段线性变换函数:图像在经过灰度拉伸后,车道线与背景路面的对比度增强使得容易区分,在后续的阈值化,二值化等一系列操作中效果明显。
弱光照的图像经过灰度拉伸处理后得到的效果图如图6所示。
2.3对图像进行阈值化处理在上述操作中,已经将车道线的特征进行了加强并且过滤了图像噪声,去除了阴影遮挡对车道线检测的影响。
但是在图像中仍然存在一些依靠灰度处理难以去除的影响,例如太过明亮的灯光,路面反射的强光等,并且还需要对图像进行边缘的增强。
因此针对于强光照造成的灰度处理无法处理掉的问题,将会采取阈值化处理。
阈值化操作的作用主要为对图像中的像素做出取舍,将高于阈值的像素舍弃掉,低于阈值的像素留下。
在上述问题中,阈值化操作能够滤去高曝光度的影响,即像素值太大以至于不可能出现车道线的区域舍弃掉,加快后续检测速度。
处理结果如图7所示。
3进行Hough变换检测车道线上述操作为图像预处理部分,目的是为了尽量减少Hough变换的计算量以及背景物体对Hough变换造成的影响。
接下来将对预处理结束的图像进行Hough变换检测出车道线并且得到最后结果。
Hough变换是图像处理中的一种特征提取技术,该过程在一个参数空间中可通过计算累计结果的局部最大值得到一个符合特定形状的集合作为Hough变换的结果。
这种方法的特点是它对数据的不完全或者噪声不是很敏感。
Hough变换的基本思想是点—线的对偶性,即图像空间里共线的点对应参数空间里相交的直线,反过来,参数空间相交于同一点的所有直线在图像空间里都有共线的点与之对应。
而为了解决垂直直线斜率无限大的问题,一般在极坐标方程中进行Hough变换。
通过对Hough变换的原理和具体步骤的描述,会发现如果直接对原图像进行Hough变换,将会耗费大量的时间用以计算除了车道线以外的干扰景物,从而对实时性造成很大的影响。
因此本文中的算法将首先对图像进行预处理,加强车道线,去除干扰,减少干扰物对车道线的影响从而使得Hough变换的实时性得到提高。
4实验结果本文中的车道线检测算法流程图如图8所示。
采集到图像之后首先扫描图像,在颜色空间上选择蓝色分量值作为判别车道线是否可能存在的依据,从而设定车道线所在区域并且去除阴影遮挡车道线所带来的影响,接下来计算图像的像素均值,根据像素均值对图像进行判断,确认采集图像的时间是白天还是夜晚,针对白天采集到的图像对比度太大,路面出现全白无法识别车道线的情况,则采用灰度均衡化增强车道线,针对夜晚采集到的图像对比度太小,车道线与背景容易混淆的情况,则采用灰度拉伸化处理增强车道线与背景的对比度,然后对经过灰度化处理的图像进行阈值化处理留下需要的车道线信息加快Hough变换的计算时间,最后进行Hough变换得到效果图。
本文中的算法基于VS2012环境和OpenCV图像处理库实现,并且对本算法进行了大量的实验。