全站仪在城市数字测图中的误差分析与估计_杨文府
全站仪坐标测量误差很大是什么原因
全站仪坐标测量误差很大是什么原因引言全站仪是一种广泛应用于工程测量领域的高精度测量设备。
然而,有时在测量过程中,我们可能会遇到全站仪坐标测量误差很大的情况,这不仅会对工程测量结果造成影响,还可能导致误导和损失。
本文将探讨全站仪坐标测量误差很大的原因,并提供一些解决方案。
1. 仪器校准不准确全站仪作为一种高精度测量设备,需要经过精确的校准才能保证测量结果的准确性。
如果全站仪的校准不准确,就会导致测量误差很大。
仪器校准不准确的原因可能包括厂家制造过程中的误差、使用过程中的损耗和误操作等。
因此,在测量前应确保全站仪已经进行了准确的校准。
2. 环境条件不合适全站仪对环境条件有着一定的要求。
如果环境条件不合适,比如存在大风、大雨、高温等恶劣气候,就会影响仪器的性能,进而导致测量误差很大。
此外,如有大量的遮挡物、振动或电磁干扰等,也会影响全站仪的测量精度。
3. 操作技巧不当全站仪的操作技巧对于保证测量精度至关重要。
操作者的技术水平和经验不足可能导致测量误差。
例如,操作者在仪器定位和观测时存在不稳定的动作、不准确的读数等;或者使用了不合适的测量方法和参数设置。
因此,良好的操作技巧和充足的经验是保证全站仪测量精度的重要因素。
4. 底座设置不稳定全站仪的底座是支撑仪器的重要部分,其稳定性直接影响测量精度。
如果底座设置不稳定、不平整或不牢固,就会引入测量误差。
因此,在使用全站仪时,底座的设置要非常注意,保证底座的稳定性和水平度。
5. 测量目标特征不明显在进行全站仪测量时,目标的特征对于仪器的准确定位和观测至关重要。
如果目标的特征不明显,比如视觉上难以识别或存在模糊、反光等问题,就会降低测量的精度和准确性。
因此,测量目标的选择和特征的清晰度对于避免测量误差很大非常重要。
解决方案针对全站仪坐标测量误差很大的原因,可以采取以下一些解决方案:•确保全站仪经过准确的校准;•调整测量环境,避免恶劣气候和干扰;•提高操作者的技术水平和经验,确保正确的操作方法;•保证底座设置稳定可靠;•选择具有明显特征的测量目标。
全站仪测量坐标误差太大常见原因及应对措施
全站仪测量坐标误差是工程测量中常见的问题,如果不及时发现并采取应对措施,将影响工程质量和进度。
本文将从以下几个方面对全站仪测量坐标误差的常见原因及应对措施进行探讨。
一、设备校准不当全站仪是通过激光技术进行测量的高精度测量仪器,在使用前需要对其进行精密校准,包括水平、垂直、角度等多个方面的校准。
如果校准不当,将直接导致测量误差的产生。
应对措施:1. 定期进行全站仪的校准和维护,保证设备的精准度。
2. 在使用全站仪之前,进行必要的功能测试和校准操作,确保设备运行正常。
二、环境因素影响全站仪在测量过程中受到环境因素的影响,例如温度、湿度、风力等因素都可能引起测量误差。
应对措施:1. 在进行测量之前,充分了解测量现场的环境情况,做好环境预处理工作。
2. 根据实际情况,采用合适的防护措施,保护全站仪不受外界环境的干扰。
三、人为操作不当无论是测量者的技术水平还是操作流程的规范程度,都将直接影响全站仪的测量结果。
测量者在操作过程中的不稳定、疏忽大意等都会造成误差的产生。
应对措施:1. 提高测量人员的专业技能和操作水平,定期进行技术培训和考核。
2. 强化操作规范,制定严格的操作流程和标准,确保每一次测量都按标准操作进行。
四、测量过程中的隐性问题全站仪的测量过程中可能存在一些隐性问题,比如信号干扰、测量误差累积等,这些问题往往是造成误差的主要原因。
应对措施:1. 对测量过程中可能存在的隐性问题进行全面的了解和分析,制定相应的预防措施。
2. 强化测量过程中的质量监控,及时发现并解决存在的问题,避免误差的产生和蔓延。
五、数据处理不当在测量结束后,测量数据的处理和分析也是影响测量结果的重要因素。
如果数据处理不当,将直接导致误差的产生。
应对措施:1. 使用专业的数据处理软件进行数据的处理和分析,确保数据的准确性和可靠性。
2. 对数据处理的操作流程和标准进行规范,加强数据处理过程的质量控制。
全站仪测量坐标误差的产生是一个综合性的问题,需要全面从设备校准、环境因素、操作规范、隐性问题和数据处理等多个方面进行全面的把控和管理。
全站仪在测量中的误差分析

全站仪在测量中的误差分析x松-------- 兰渝铁路LY12标摘要:1»看社会经济和科学技术不斷发展調绘技术水平也相应地得到了迅速提高•测董放样仪窗的更新大幅度的提高了放样箱度,根据全站仪的工作原理,分析全站仪坐标放样碾差产生的原因及其改正方法,以此提高测M度, 保证理质量.关M:全站仪、荊度、放样、現差伴着十二五时期经济发展的指导思想,铁路、髙速公路建设在我国迅速发展,同时对工程质量的要求也是愈来愈高,这就对精度的要求加强了许多,随着全站仪在施工放样中的广泛应用,为了便全站仪在实际生产中更好地运用,现结合工程测量理论,对全站仪在测量放样中的误差及其注意事项进行分析。
在我们分部桥梁施工测量中,全站仪主要是用干测量坐标点位的控制和髙程的控制,在以下几个方面对全站仪放样的误差作简要概述。
1、全站仪在施工放样中坐标点的误差分析全站仪极坐标法放样点点位中误差M P由测距边边长S(m)、测距中误差m』m)、水平角中误差皿贸")和常数p=206265"共同构成,其精度估算公式为:M P = ±Vm z2 + (Smp/p) 2(1)而水平角中误差mJ")包含了仪器整平对中误差、目标偏心误差、照准误差、仪器本身的测角精度以及外界的影响等。
由式⑴可得S2=[(M P2-m c2)Xp2]/m p2(2)又有S2=(X O-X A)2+(Y O-Y A)2所以有(Xo-Xj^fYo-YAl^fMp^m^j/fmp/p)2 (3)式(3)表明,对固定的仪器设备,采用相同的方法放样时,误差相等的点分布在一个圆周上,圆心为测站O。
因此对每一个放样控制点O,可以根据点位放样精度m计算圆半径S,在半径X围内的放样点都可由此控制点放样。
由式(1)可看出,放样点位误差中,测距误差较小,主要是测角误差。
因此,操作中应时时注意提商测角精度。
2、全站仪在控制三角髙程上的误差分析一般情况下,在测量高程时方法为:设A,B为地面上高度不同的两点。
全站仪的使用方法与测量误差分析

全站仪的使用方法与测量误差分析全站仪是一种用于测量地理空间坐标和方位角的高精度仪器,广泛应用于土木工程、建筑设计、测绘等领域。
本文将介绍全站仪的使用方法,并分析其中可能产生的测量误差。
一、全站仪的使用方法1.设置基准点在使用全站仪之前,首先需要设立基准点。
基准点通常是已知坐标的标志物或者特定位置,可以通过GPS定位等方式获得其精确坐标。
在测量过程中,全站仪将基准点作为参考,用于确定其他测点的坐标。
2.安装全站仪将全站仪放置在一个平稳的三脚架上,并平稳地旋转到观测点位的方向。
确保全站仪的水平仪在水平位置,外接电源和电缆也需要正确连接。
3.测量角度和距离使用全站仪进行测量时,首先需要测量观测点位之间的角度。
在目标点位上放置一个反射器或者棱镜,并使用全站仪测量该点位与基准点之间的水平角度、垂直角度和斜距。
4.记录数据使用全站仪进行测量后,需要将测得的角度和距离数据记录下来。
现代的全站仪通常配备了内置存储设备和数据传输功能,可以方便地记录和传输数据。
在记录数据时,应将测量点位的名称、测量时间等相关信息一并记录下来。
5.计算坐标和角度将测得的角度和距离数据输入到相应的软件中,可以通过三角测量原理计算出测量点位的坐标和方位角。
二、全站仪测量误差分析1.观测误差全站仪测量过程中存在着观测误差,其来源主要包括仪器本身的系统误差和操作人员的操作误差。
仪器系统误差包括仪器刻度误差和随机误差等,而操作误差主要包括观测者对测量点位的准确定位误差和读数误差。
2.环境误差全站仪的测量精度受到环境因素的影响,例如大气折射、温度、湿度等因素会引起测量误差。
这些误差可以通过仪器内置的大气压力、温度和湿度传感器进行校正,提高测量精度。
3.误差传递全站仪测量过程中的误差可能会通过计算和传递,导致最终得到的测量结果产生误差累积。
例如,在三角测量计算坐标时,若一个点位的观测误差传递到下一个点位,再传递到后续点位,就会导致最终的测量结果与真实值存在一定的偏差。
GPS_RTK的技术方法探讨与对策_杨文府
第17卷第4期 测 绘 工 程 V ol .17№.42008年8月 ENGIN EERING OF S URVEYING AND MAPPING Aug .,2008GPS -RTK 的技术方法探讨与对策杨文府,崔玉柱(山西省煤炭地质物探测绘院,山西晋中030600)摘 要:对G PS -R T K 的测量原理、误差分析及参数转换等进行简要阐述,并介绍G PS -R T K 高程测量的方法。
通过高精度全站仪观测数据与G PS -RT K 高程数据进行分析、比较,指出在GPS -RT K 高程测量中应该注意的问题,并针对生产实践中存在的作业问题,找出提高G PS -RT K 高程测量精度的有效措施,旨在增广G PS -R T K 技术的应用前景,提高其测量成果的精度。
关键词:G PS -RT K ;数据分析;高程精度;有效措施中图分类号:P 228 文献标识码:A 文章编号:1006-7949(2008)04-0050-04On analysis and countermeasure of technology and method in the field of GPS -RTKYANG Wen -fu ,CU I Yu -zhu(Coal G eological Geo phy sical Ex plor ation Survey ing &M apping Institute of Shanx i P rov ince ,Jinzhong 030600,China )A bstract :This pape r studies the surveying principle ,erro r analy sis and parameter conve rsion of GPS -RTK briefly ,and introduces the GPS -RT K elev ation survey ing m ethod .Som e questions are pointed o ut that should be paid attention in GPS -RTK elev ation surveying by analy zing and co mparing hig h precisio n total statio n observatio n data w ith GPS -RTK elevatio n m easurement data .Some effective measures of improved GPS -RTK elevatio n m easurement are presented to overco me these pro blems in productive practice .The aim is to w iden the applicatio n of GPS -RTK techno logy and im prov e its m easurement precision .Key words :GPS -RTK ;data analy sis ;elev ation accuracy ;effective measure 收稿日期:2007-04-17作者简介:杨文府(1978~),男,助理工程师. 当前,在测绘工作中,GPS -RTK 以其定位精度高、效率快、不要求点位相互通视、自动化程度高、误差积累小、测绘成果统一、操作简单、全天候等优点,在测绘各个领域被广泛运用。
全站仪测量误差的分析与检测

46 装备园地测绘技术装备季刊第10卷 2008年第3期全站仪测量误差的分析与检测董刚1 王玲2(1.青海省测绘产品质量监督检验站 西宁 810001;2.青海省基础地理信息中心 西宁810001) 摘 要:全站仪是在外业测量中广泛使用的一种测量仪器,其测量误差的大小直接影响测绘成果的质量。
为了保证测绘质量,我们有必要通过对全站仪加常数、乘常数、周期误差的分析,并通过实际检测的数据结果测出中误差,科学地评定全站仪测距的精度,方法可靠,操作简便。
关键词:全站仪 测距中误差 检测1 引言光电测距仪问世60年来,使测量的工作效率得到了较大的提高,得到测绘界的普遍重视,随着科学技术的发展和进步,又出现了半导体激光器和发光管为光源的短程光电测距仪,如砷化镓(GaAS)发光二极管,是测距仪更为理想的光源,该发射光的强度能随发光管上注入电流大小的变化而变化;也就是说发射的光强能受馈电电流的调制,这种特性简化了测距仪的结构,使其体积更小,重量更轻,功耗更低。
由于工作时发出红外荧光,其波长一般在0.8~0.94μm波段,属于电磁波的红外线波段,故称为红外光电测距仪(简称红外测距仪),它正向小型化,多功能,高精度等方向发展。
测距仪按测程可分三类:短程光电测距仪(测程小于3km);中程电磁波测距仪(测程3~15km);长程电磁波测距仪(测程大于15km);按测距精度可分为:Ⅰ级,小于5mm;Ⅱ级,5~10mm;Ⅲ级,11~20mm(以每公里测距中误差表示)。
2 全站仪的特点及误差来源随着计算机技术在测量领域中的应用,出现了全站型电子速测仪——是红外测距仪和电子经纬仪及数据终端机相结合的仪器。
是一种兼有自动测距、测角、计算和数据处理,自动记录和传输功能的自动化、数字化及三维坐标测量系统,称此仪器为全站仪。
除上述功能外,操作语言化(不同国家设置不同语言),仪器采用绝对编码和双轴补偿系统,电子水泡调平、激光对中、自动调焦、自动跟踪目标测量、无棱镜测距,自身校正功能和各种测量软件的应用(如悬高、面积、偏心测量、道路放线测量等)。
全站仪测量误差分析及预防措施
计算测量 点位 的精度 , 以确保工程质量 。
结束语:
公路和铁路上 的同行们 , 分享我这些经验和 分析 , 希望可 以
1 5 5・
・
路桥 建设
建材发展导向 2 0 1 4年 l 1 月
公路桥梁 施歪管理存在的主要 题及改进措施探讨
粱 波
( 四川业邦建设工程有 限公司 四川 成都 6 1 0 1 0 1 )
A
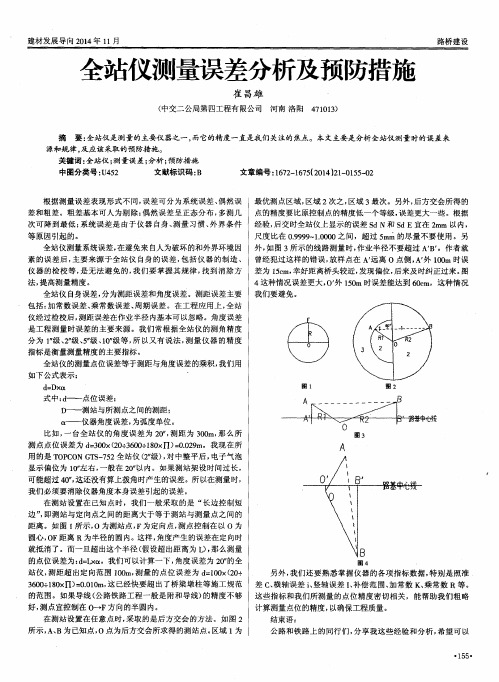
可 能超过 4 0 " , 这还没有算上拨角时产生的误 差。所 以在测量时 ,
我们必须要消除仪器角度本身误差 引起的误差。 在测站设置在 己知点时 ,我们一般采 取的是 “ 长边控制 短 边” , 即测站 与定向点之间的距离大于等于测站 与测量点之 间的 距 离。如 图 1 所示, O为测站点 , F为定向点, 测点控制在 以 O为 圆心 , O F距离 R为半径的圆内。这样 , 角度产生 的误差在定向时 就抵消 了。而一旦超 出这个半径 ( 假设超 出距离 为 D , 那 么测 量 的点位误差为 : d = L  ̄ c x 。我们 可以计 算一下, 角度误差 为 2 0 ” 的全 站仪 , 测距超 出定 向范 围 1 0 0 m, 测量 的点位误差 为 d - l O O x ( 2 o ÷
源和规律 , 及应该采取 的预 防措施。 关键词 : 全站仪 ; 测量误差 ; 分析 ; 预 防措施
中图分类号 : U 4 5 2
文献标识码 : B
文章编号 : 1 6 7 2 — 1 6 7 5 ( 2 0 1 4 ) 2 1 — 0 1 5 5 — 0 2
根据测 量误 差表现形式不 同, 误差可 分为系统误差 、 偶然误 最优测点区域, 区域 2次之, 区域 3最次 。另外 , 后方交会所得 的 差和粗差 。粗差基本可人 为剔 除; 偶然误 差呈正态分布 , 多测几 点的精度要比原控制 点的精度低一个等级, 误差更大一些。根据 次可 降到最低 ; 系统误 差是 由于仪 器 自身 、 测量 习惯 、 外 界条件 经验 , 后交 时全站仪上显示的误 差 S d N和 S d E宜在 2 mm 以内,
全站仪在数字测图中的误差来源

全站仪在数字测图中的误差来源摘要:随着空间技术的成熟,测绘技术手段向信息化测绘阶段过渡,遥感与动态GPS(RTK)在测量工作中的运用也越来越多。
但不可忽视的是,全站仪因其操作简单、全数字显示、双轴补偿和数据传输等优点,与RTK相比具有购置费用低、效费比高等特点,仍然是测绘工作中广泛采用的仪器。
为了充分,合理地发挥它的作用,在了解其性能,使用方法的基础上,也应了解其本身所带来的测量误差大小,这对我们在工作中选择,操作仪器方面是有所帮助的,本文对全站仪测量过程中产生的误差作以估算、分析。
关键词:全站仪;误差;测量Abstract: with the space technology maturity, surveying and mapping technology to surveying and mapping phase transition information, remote sensing and dynamic GPS (RTK) in the use of the measurement work more and more. But important, tachometer because of its simple operation, and the digital display, dual axle compensation and data transmission and other advantages, compared with RTK with purchase expenses low, cost-effectiveness than higher characteristic, is still widely used in surveying and mapping work the instrument. In order to fully, reasonably play its role in know its performance, based on the method of use, also should understand its itself brings the measurement error size, this to our work in options, and operating instruments is the help, this paper by using produces in the process of the measurement error in the estimation, the analysis.Keywords: tachometer; Error; measurement前言:全站仪又称全站型电子速测仪,是一种兼有电子测距、电子测角、计算和数据自动记录及传输功能的自动化、数字化的三维坐标测量与定位系统,因此,它也兼具经纬仪的测角误差和光电测距仪的测距误差性,因此,它也兼具经纬仪的测角误差和光电测距仪的测距误差性质。
全站仪在城市数字测图中的误差分析与估计

N 回测角 中误差 M 测= 标, 。 √ M 野外半测 回测角中
() 2 仪器对 中误差对水平 角精度 的影 响 , 仪器的 中
MB + + 半 。 =√ 2 测
下面 就 以上分 析 , 据 《 根 城市 测量 规范 》 以下 简 (
误差 M半 √ Ml 2 标 铡= 2 测= M 。
随着 现代 高新 技 术 的 发展 与运 用 . 测绘 工 作 正 从 数字化 测 绘技 术 手 段 向信 息 化 测 绘 阶 段 过 渡 . 遥 感 与 G S在测 量工 作 中的运用 也越 来越 多 。但 不可 P
在工作 中的对 中偏心距 一般不会超过 3m 这里取 e m. = 3m S在这 里取全 站仪测 图 时的设站 点 ( m;. 图根 点 ) 至 后视 方向( 另一通视图根点 ) 之间的距离 :, s取全站仪设 站点至待测地面点 之间 的规范 限制 的最大距 离。 由公 式知 . 中误差对水平角精度 的影响与两 目标之间的距 对 离 SB A成正 比。 即水平角在 10 时影 响最大 , 8。 在本文讨论 中只考虑其最大影 响。 () 3 目标 偏 心 误 差 对 水 平 角 测 角 的 影 响 。 献 文
摘要 : 中分析 了全 站仪在 城 市数 字测 图 中的点位 与 高程 误 差 . 文 讨论 了各 项误 差对 点位 和 高程 的影
响, 并根据 估计认 为其精度 完全满足 《 市测 量规 范》 城 对点位 中误 差 、 高程 中误差 的有 关规 定。
关健词 :全站仪 ;城 市数 字测 图:点位 中误 差 ;高程 中误 差 中 图分 类 号 :2 7 1 P 0 . 文 献标识 码 : B 文章 编号 :0 1— 5 X(0 7 0 0 1 0 10 3 8 2 0 ) 2— 0 2— 2
全站仪误差分析与校正的实际操作方法
全站仪误差分析与校正的实际操作方法全站仪是测量领域中常用的一种仪器,它可以高精度地测量水平角、垂直角和斜距。
然而,由于各种原因,全站仪在测量过程中产生的误差不可避免。
误差的存在会对测量结果产生一定的影响,因此,在使用全站仪进行测量前,进行误差分析和校正是非常必要的。
误差分析是指定量化测量误差的过程。
全站仪的测量误差主要包括系统误差和随机误差两部分。
系统误差是由于仪器的本身性能造成的,如仪器的刻度误差、仪器的非正交误差等。
随机误差是由于外界环境的影响导致的,如风、温度等因素引起的测量值波动。
误差分析的目的是找出各种误差的来源和大小,为进一步的校正提供依据。
校正是指根据误差分析的结果,对全站仪进行调整和修正的过程。
校正的方法主要有以下几种。
第一种方法是刻度校准。
全站仪的刻度误差是导致其水平角和垂直角测量值不准确的主要原因之一。
刻度校准的方法一般是通过与标准仪器进行对比,确定仪器的零点、刻度间距等参数是否准确。
校准时要注意使用准确的参考点和稳定的测量平台,以确保校准的准确性。
第二种方法是非正交误差的校正。
全站仪在制造过程中,由于各种原因,存在着非正交误差。
非正交误差是指全站仪的测量轴线与其相互垂直的轴线之间存在的误差。
校正的方法是通过测量一组已知位置的点,根据实际测量值与理论测量值的差异,利用数学方法计算出非正交误差的大小和方向,然后进行调整和纠正。
第三种方法是系统误差的校正。
系统误差包括仪器的固有误差和人为误差。
固有误差是由于仪器本身的结构和性能限制导致的,如刻度不准确、光学系统失调等。
人为误差是由于操作人员技术水平不高或操作不当导致的,如观测时姿态不稳定、目标点选择不准确等。
校正的方法是通过对一系列已知位置的点进行测量,计算出实际测量值与理论测量值的差异,并根据差异的大小和方向来判断和修正系统误差。
除了以上三种方法外,还有一些其他方法也可以用于全站仪误差的校正,如温度校正、气压校正等。
在实际操作中,需要根据具体的测量需求和仪器的特点选择适当的校正方法。
电子全站仪的校准与误差分析
电子全站仪的校准与误差分析全站仪是一种现代化的测量设备,广泛应用于建筑、测绘等工程领域。
准确地校准和分析全站仪的误差是保证测量结果可靠性的重要环节。
本文将探讨电子全站仪的校准流程及误差分析,并着重介绍一些常见的误差类型与纠正方法。
一、校准流程电子全站仪的校准需要按照一定的流程进行,以确保其测量准确度。
校准流程主要包括基准标定、内部参数标定和外部参数标定。
基准标定是对全站仪的基准坐标系进行标定,通常采用经典的坐标转换方法,以及利用全站仪与已知控制点的测量结果进行配准。
这一步骤的目的是建立一个可靠的基准坐标系,以后进行测量时可以参考。
内部参数标定是校准全站仪的内部测量元件,包括人体曲线、水平角度和垂直角度等。
这一步骤需要使用专门的校准设备,通过与已知角度标准进行对比,修正全站仪内部元件的读数。
通常使用的方法是多次测量同一目标,通过对比不同结果之间的偏差来确定修正值。
外部参数标定是校准全站仪的外部元件,如非正交性、切射误差等。
这一步骤常常需要将全站仪安装在一台精密转台上,通过对不同角度的测量结果进行比较,确定外部参数的误差,并进行修正。
二、误差分析电子全站仪的测量误差主要包括观测误差、仪器误差和环境误差三个方面。
观测误差是由于人为操作不精确造成的,包括目标点非正中、照准精度不高等。
这种误差在测量中不可避免,但可以通过良好的操作训练和规范的测量流程来减小。
仪器误差是指全站仪本身的制造、装配等方面的误差。
例如,水平轴不垂直、垂直轴不水平等。
这些误差通常在校准过程中被发现,并通过修正或补偿来消除。
环境误差是由外部环境因素引起的,如温度、大气压等变化。
这些因素会对全站仪的测量结果产生影响,因此在测量过程中需要注意环境因素的监测和记录,以便进行误差消除。
此外,还有一些特殊误差需要特别关注,如大气折射误差、杆尺伸缩误差等。
这些误差通常需要专门的测量方法和校准设备来纠正。
通过校准与误差分析,我们可以了解全站仪的误差来源、大小及其对测量结果的影响。
全站仪在施工测量放样中的误差及其注意事项(精)

全站仪在施工测量放样中的误差及其注意事项引言全站仪作为一种高精度的测量仪器,在施工测量和放样中被广泛应用。
然而,由于各种原因,全站仪在测量中会出现一定的误差,影响测量的精度和可靠性。
因此,本文将重点讨论全站仪在施工测量和放样中的误差及其注意事项,帮助读者提高在施工测量和放样中的准确性和可靠性。
全站仪的误差来源测量环境全站仪的测量精度受到测量环境的影响,主要包括以下几个方面:1.温度影响:全站仪在使用过程中会受到温度的影响,温度变化会使测量误差产生变化;2.湿度影响:全站仪在潮湿的环境中使用会出现雾气或水珠,影响测量精度;3.光线影响:测量现场的光线强度对全站仪的测量精度有很大的影响。
仪器本身误差全站仪本身也存在一定的误差,主要包括以下几个方面:1.仪器标定误差:全站仪在标定时存在一定的误差,标定不准确会影响测量精度;2.仪器本身精度:全站仪的精度是有限的,精度越高的仪器,成本也越高;3.仪器老化:随着使用时间的增加,全站仪所存在的误差会逐渐增加,仪器需要定期检测和校准。
操作和人为因素测量过程中存在一定的人为因素造成误差,如:1.操作不当:全站仪的使用需要严格按照说明书进行,操作不当会影响测量的精度;2.视野问题:在测量中需要注意视野的影响,避免盲点等问题。
如何避免全站仪误差标定和调校为了提高仪器精度,我们需要进行标定和调校。
首先对全站仪进行标定,包括水平标定和垂直标定。
接着需要对全站仪进行调校,操作方法为:1.拿出校准器,使用校准器进行调校;2.进行水平标定;3.进行垂直标定;4.进行电气转角标定;5.进行其他标定。
操作注意事项除了标定和调校之外,正确的测量操作也是十分重要的。
以下是一些注意事项:1.清洁全站仪表面和望远镜:在使用前需要清洁全站仪表面和望远镜,以保证精度;2.安装三脚架:安装三脚架时需要制定合理的安装位置和高度,仪器必须处于水平状态;3.遮阳处理:全站仪需要进行遮阳处理,以保证可以在强烈阳光下使用;4.视线注意:在测量时需要注意视线的范围,避免视野被遮挡;5.环境条件:在施工测量和放样中需要注意环境条件,避免雨天、大风天等影响测量。
全站仪器坐标测量误差
全站仪器坐标测量误差引言全站仪是一种广泛应用于测量工程和建筑行业中的高精度测量仪器。
它采用了角度、距离和高度的测量功能,可以用于测量土地、建筑物、道路以及其他工程结构的坐标信息。
然而,在测量过程中,全站仪器的坐标测量误差是一个不可避免的问题,因为它会直接影响测量结果的准确性和可靠性。
本文将介绍全站仪器坐标测量误差的原因和影响因素,并探讨一些减小误差的方法。
原因和影响因素1. 仪器精度全站仪器的设计制造精度直接影响着其坐标测量的准确性。
制造商通常会在全站仪的技术规格中指定其测量精度。
例如,一个典型的全站仪可能在理想条件下具有1毫米的距离测量精度和1秒的角度测量精度。
然而,在实际使用中,仪器的精度可能会受到环境影响、长期使用引起的磨损以及操作员技术水平等因素的影响。
2. 环境条件全站仪在特定的环境条件下进行测量。
例如,气温、大气压力、湿度等环境因素都会对测量结果产生影响。
气温的变化可以导致测距仪器内部各组件的热膨胀,从而引起测量误差。
大气压力和湿度的变化则会影响测量光线的传播速度和折射率,进而影响角度测量的准确性。
3. 地面条件地面的平整度和稳定性也会对全站仪的测量结果造成影响。
如果地面不平坦或不稳定,全站仪在进行测量时可能会出现震动,导致测量误差。
此外,地面形态的变化也会影响测距仪器的高度测量。
4. 操作员技术水平操作者的技术水平同样对全站仪坐标测量的准确性有很大影响。
技术熟练的操作员能够正确使用仪器并遵循正确的测量程序,从而降低测量误差。
另一方面,对于技术水平较低的操作员而言,可能会出现操作不当、读取不准确或操作疏忽等问题,导致测量误差的增加。
减小误差的方法1. 定期维护和校准定期对全站仪进行维护和校准是减小误差的重要手段。
维护和校准包括清洁仪器、校正零位、调整仪器参数等操作。
维护的目的是确保仪器的正常工作状态,校准则是校正仪器的误差,使其回到准确的状态。
2. 操控仪器的稳定性在测量过程中,操作员应该注意保持仪器的稳定性。
探讨全站仪的应用和测距误差的分析与检测
探讨全站仪的应用和测距误差的分析与检测摘要:全站仪将光电测距仪、数据记录以及电子经纬仪融为一体,具有非常精确的测角和测距功能,其实用价值远大于经纬仪坐标法,常见于地下隧道施工、地上大型建筑等变形监测和精密工程测量中。
该文基于笔者多年的工作经验,详细介绍了全站仪的特点和应用,同时阐述了使用全站仪测量时误差产生的来源,分析探讨了误差原因和检测方法。
关键词:全站仪放样测量加常数乘常数全站仪又称全站型电子测速仪,是把光电测距仪、电子经纬仪、微电脑处理器融为一体,是集合了垂直角、距离、水平角、距离放样、高差、面积量算等功能的测绘控制系统。
它能够自动显示测量结果,能和外围设备交换信息。
作为高技术测量仪器,全站仪拥有电子记录、自动化快速三维坐标测量和定位功能、内外业一体化、外业数据自动化采集等多种自动化流程,在测绘界备受欢迎。
全站仪实现了测绘工作的自动化,减少了人工投入,提高了计算准确性,有效提高了测绘工作效率。
1 全站仪特点及测量应用由于全站仪可以配合电子计算机使用,因此测绘工作的实效性得到很大提高,下面对全站仪的主要特点做具体描述:第一,测距速度极快;第二,简单的内业计算;第三,高差对作业面的限制减少,全站仪的高差通常在150 m以内,这个高差可以达到各种大中型工程的要求;第四,使用坐标放样时,放样边长和角差会显示在仪器屏幕上,简化了操作规程;第五,不需要钢尺测量;第六,粗略放样半径大,可以到2000 m以上。
虽然全站仪操作和使用比较方便,但是其工作条件受人为因素和地形限制较大。
全站仪在测量方面,主要应用于放样测量、偏心测量、悬高测量和面积计算。
(1)放样测量放样测量主要用于按照要求点,在实地上进行测定。
放样测量主要包括悬高放样测量、坐标放样测量以及距离放样测量。
放样测量使用盘左位置进行,显示差值=实测值—放样值。
在放样测量中,经过对照准点的水平角、坐标或者距离的测量,仪器显示的是预先输入的实测值和放样值之差。
全站仪坐标测量误差分析

全站仪坐标测量误差分析引言全站仪是一种高精度的测量仪器,广泛应用于土木工程、建筑工程等领域中进行测量工作。
然而,在进行坐标测量时,由于多种因素的影响,全站仪测量结果存在一定的误差。
因此,对全站仪坐标测量误差进行详细分析是十分重要的,本文将从几个常见的误差来源进行分析。
仪器误差全站仪作为一种复杂的测量仪器,其内部存在着多种仪器误差。
仪器误差主要包括:EDM系统误差全站仪中的电子测距(EDM)系统是测量距离的关键部分,其精度会直接影响测量结果的准确性。
EDM系统误差主要包括系统常数误差、系统判读误差、系统精度误差等。
其中,系统常数误差是指由于EDM系统的结构特点和工作原理导致的常数偏差,主要包括仪器常数修正、大气压力修正、温度修正等。
系统判读误差是指EDM系统中测量结果的判读误差,主要受人为因素影响,包括切线误差、调焦误差等。
系统精度误差主要指由于EDM系统的精度限制导致的误差,包括指示误差、接收误差等。
光学系统误差全站仪中的光学系统主要负责测量角度,其精度也会对测量结果产生影响。
光学系统误差主要包括系统判读误差、系统常数误差、系统精度误差等。
系统判读误差是指由于光学系统中测量结果的判读误差引起的误差,主要与人为因素有关,包括近心误差、远心误差等。
系统常数误差是指由于光学系统的结构特点和工作原理导致的常数偏差,主要包括仪器常数修正、指向误差修正等。
系统精度误差主要是由于光学系统的精度限制导致的误差,包括漏光误差、偏方向误差等。
环境因素误差除了仪器本身存在的误差外,环境因素也会对全站仪测量结果产生影响。
环境因素误差主要包括:大气条件误差大气条件是全站仪测量中一个重要的影响因素。
大气条件误差主要包括大气折射误差和大气稳定误差。
大气折射误差是指大气中介质的非均匀性引起的折射效应产生的误差,其主要受大气温度、压力、湿度等因素的影响。
大气稳定误差是指由于大气环境的不稳定性导致的误差,主要包括大气湍流、气流扰动等因素引起的误差。
全站仪测量误差分析

全站仪测量误差分析随着新仪器新设备的不断出现,测量技术的不断提高,同时对工程质量的要求也是愈来愈高,这就对精度的要求加强了许多,随着全站仪在施工放样中的广泛应用,为了使全站仪在实际生产中更好地运用,现结合工程测量理论,对全站仪在测量放样中的误差及其注意事项进行分析。
在我们建筑施工测量中,全站仪主要是用于测量坐标点位的控制和高程的控制,在以下几个方面对全站仪放样的误差作简要概述。
1、全站仪在施工放样中坐标点的误差分析全站仪极坐标法放样点点位中误差MP由测距边边长S(m)、测距中误差m s(m)、水平角中误差mβ(″)和常数ρ=206265″共同构成,其精度估算公式为:而水平角中误差mβ(″)包含了仪器整平对中误差、目标偏心误差、照准误差、仪器本身的测角精度以及外界的影响等。
式(3)表明,对固定的仪器设备,采用相同的方法放样时,误差相等的点分布在一个圆周上,圆心为测站O。
因此对每一个放样控制点O,可以根据点位放样精度m计算圆半径S,在半径范围内的放样点都可由此控制点放样。
由式(1)可看出,放样点位误差中,测距误差较小,主要是测角误差。
因此,操作中应时时注意提高测角精度。
2、全站仪在控制三角高程上的误差分析一般情况下,在测量高程时方法为:设A,B为地面上高度不同的两点。
已知A 点高程H A,只要知道A点对B点的高差H AB即可由H B=H A±H AB得到B点的高程H B。
当A、B两点距离较短时,用上述方法较为合适。
在较长距离测量时要考虑地球曲率和大气折光对高差的影响。
设仪器高为i,棱镜高度为l,测得两点间的斜距为S,竖直角α,则AB两点的高差为:一般情况下,当两点距离大于400m时须考虑地球曲率及大气折光的影响,在高差计算时需加两差改正。
式中R为地球曲率半径,取6371km, k为大气折光差系数,k=1-2RC (C为球气差,C=0.43D2/R,D:两点间水平距离)。
从上式中可以看出,当距离较远时,影响高差精度的主要因素就是地球曲率及大气折光,如果高程传递次数较多,累计误差就会加大,在测量时,最好是一次传递高程,若有需要,往返测高程,取其平均值以减小误差。
全站仪测量误差分析

第6讲 全站仪测量误差分析
教学目标
1.掌握全站仪角度测量的方法 2.掌握全站仪测量过程中误差产生的原因
知识目标:
1.能够正确使用全站仪进行角度测量 2.能够根据全站仪测量误差产生的原因,采取有效措施避免或减弱误差对测量成果所产生的影响
技能目标:
一.水平角观测方法
① 全圆方向观测法
一个测回中将测站上所有要观测的方向逐一照准进行观测,在水平度盘上读数,得出各个方向观测值。由两个方向观测值可以计算得到相应的水平角值。
尽量减小垂直轴的倾斜角v值; 测回间重新整平仪器; 对水平方向观测值施加垂直轴倾斜改正数。
由于垂直轴的倾斜角v的大小和倾斜方向一般不会因照准部的转动而有所改变,因此由于垂直轴倾斜而引起水平轴倾斜的方向在望远镜倒转前后也是相同的,因而对任一观测方向在盘左、盘右观测结果的平均值中不能消除这种误差的影响。 因此在观测时一般采取以下措施来削减这种误差对水平方向观测值的影响,从而提高测角的精度。
二、全站仪的垂直轴倾斜误差 设视准轴与水平轴正交,水平轴垂直于垂直轴,仅由于仪器未严格整平,而使垂直轴偏离测站铅垂线一微小角度,这就是垂直轴倾斜误差。如果垂直轴位于与铅垂线一致的位置,则旋转仪器的照准部,水平轴所形成的平面呈水平状态,下图中的 ,即画有斜线的平面。如果垂直轴倾斜了一个小角,则旋转仪器的照准部,水平轴所形成的平面相对于水平面也倾斜了一个小角v,如下图中的 。这两个旋转平面相交,图中 就是它们的交线。
1.什么是全站仪的三轴误差?如何测定?它们对水平角观测有何影响?在观测时采用什么措施来减弱或消除这些影响? 2.用两个度盘位置取平均值的方法消除视准轴误差影响的前提条件是什么? 3.垂直轴倾斜误差的影响能否用两个度盘位置读数取平均值的方法来消除?为什么? 4.为什么说垂直轴倾斜误差对方向观测值的影响与观测目标的垂直角和方位有关?为了削弱垂直轴倾斜误差对方向观测的影响,《规范》对观测操作有哪些规定? 5.影响方向观测精度的误差主要分哪三大类?各包括哪些主要内容? 6.何谓水平折光差?为什么说由它引起的水平方向观测误差呈系统误差性质?在作业中应采取什么措施来减弱其影响?
利用全站仪对数字化测图进行误差精度分析(精)

利用全站仪对数字化测图进行误差精度分析(精)利用全站仪对数字化测图进行误差精度分析摘要:文中首先阐述了数字化测图的作业过程,然后分析了全站仪在数字测图中的误差来源,最后讨论了各项误差对测图精度的影响。
关键词:全站仪数字化测图精度分析目前,随着电子科学技术和计算机的发展,全站仪及光电测距仪的普及,与传统的白纸测图方法相比,数字化测图以其测图精度高、数据采集快,劳动强度低,产品的使用与维护方便、快捷、利用率高等优点被广泛用于测绘生产、土地管理、城市规划等部门,并为广大用户所接受。
数字化测图的采集数据及成图过程见图1。
文中拟就全站仪数字化测图的地形图平面位置精度与高程精度进行分析,以便使全站仪数字化测图有章可循。
图1 数字测图系统框图1 测量碎部点平面误差来源及精度分析全站仪数字化测图的平面误差来源主要有:望远镜照准误差、读数误差、仪器误差、目标偏心误差和外界条件的影响。
其中目标偏心误差和人为操作误差不容忽视。
(1)望远镜照准误差:该误差与望远镜放大倍率有关,取V=30,则(2)读数误差:使用全站仪作业,多次重复读数误差一般超过,故取。
(3)仪器误差:全站仪由于结构合理,仪器整平精度高,还有倾斜自动补偿功能,从全站仪鉴定资料上看,一般仪器误差,故取。
(4)目标偏心误差:即由于棱镜杆偏心引起的测角误差,这里取偏心误差为,则有(S为测距长度,。
(5)测站偏心误差:采用光学对点器对中,测站偏心不超过,则由此引起的测角误差为:。
(6)外界条件的影响:主要是温度变化对视准轴的影响,据资料介绍,温度变化1℃,测角误差变化在之间。
故取。
综合上述影响,半测回方向中误差。
为便于后面精度估算,这里假设定向边与测碎部点边边长相同,则半测回测角中误差为,定向边与测碎部点边长相差很大时对测角中误差影响很大,现以定向边边长100m为例,推求不同的测点边长所引起的碎部点点位中误差,如表l。
2 全站仪三角高程测量误差来源及精度分析全站仪测量点位高程采用三角高程测量的方法,高差计算公式为:由公式知,点位高程的误差来源主要有:测距误差、测角误差、量测仪器高和目标高误差以及球气差影响。
全站仪误差分析及评估方法
全站仪误差分析及评估方法[关键词]全站仪;误差分析;测量平差;一、引言全站仪数字化测图技术是现代测绘技术、计算机技术和信息技术相结合的产物,也是地图制图学研究的重要方向之一。
自20 世纪90 年代以来,随着全站仪和计算机技术的发展和普及,数字化测图技术的研究得到了飞速的发展。
简单地说,数字测图就是用数字形式存储全部地图信息的地图,它是用数字形式描述地图要素的属性、定位和关系信息的数据集合,是存储在具有直接存取性能的介质上的关联数据文件。
数字化测图技术在测绘生产与实践中已得到了广泛的应用。
为了分析和评估全站仪数字测图的精度问题,本文以全站仪数字测图技术的方法入手,从全站仪数字测图技术的过程中,分析和评估全站仪数字测图的精度,并对全站仪在数字测图使用过程中的误差产生及大小作分析,从而正确评定全站仪数字化测图的精度。
二、全站仪数字化测图点位中误差分析全站仪是全站型电子速测仪的简称,它集电子经纬仪、光电测距仪和微电脑处理器于一体。
因此,它也兼具经纬仪的测角误差和光电测距仪的测距误差性质。
本文分别对这两项误差在全站仪数字化测图中的大小进行分析,然后综合两方面的影响对地面点的点位误差进行分析与估算。
1.徕卡全站仪简介本次全站仪数字测图精度试验,使用的是徕卡TC407 全站仪。
国内外全站仪品牌有十几种,但徕卡全站仪有其独特的结构和程序,其无限位制动( 水平、垂直制、微动系统和激光对中器) 功能就简化和方便了使用者的操作。
徕卡系列全站仪的数据格式,有原始数据,即IDEX 数据文件,数据输出格式有GSI 格式和IDEX 格式,也可自定义数据格式,并且产品具有国际大品牌的实力,市场认知度2.全站仪测角误差分析经检验合格的全站仪水平角观测的误差来源主要有以下几种。
(1) 系统误差( 仪器本身的误差)分析仪器本身误差的主要依据是其厂家对仪器的标称精度,即野外一测回方向中误差Mβ,由误差传播定律知,野外一测回测角中误差Mβ测= 7″;野外半测回方向中误差M 方= M 方=m2中+ m2读+ m2瞄+ m2仪+ m2(2) 目标偏心误差对水平角测角的影响根据《测量学》推导出的公式为m偏= ρ/2 × ( e1 /S1) 2 + ( e2 /S2) 2式中,S1、S2分别为全站仪测图时照准后视方向的距离和全站仪测图时照准待测点的距离; e1取仪器设站时照准后视方向的误差,此项误差一般不会超过5 mm。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
全站仪在城市数字测图中的误差分析与估计杨文府1,孙保国2,张阳芳1,崔玉柱1(1.山西省煤炭地质物探测绘院,山西晋中 030600;2.襄樊市襄阳区规划处,湖北襄樊 441104)摘要:文中分析了全站仪在城市数字测图中的点位与高程误差,讨论了各项误差对点位和高程的影响,并根据估计认为其精度完全满足《城市测量规范》对点位中误差、高程中误差的有关规定。
关健词:全站仪;城市数字测图;点位中误差;高程中误差中图分类号:P207+11 文献标识码:B 文章编号:1001-358X (2007)02-0012-02 随着现代高新技术的发展与运用,测绘工作正从数字化测绘技术手段向信息化测绘阶段过渡,遥感与GPS 在测量工作中的运用也越来越多。
但不可忽视的是,全站仪因其操作简单、读数准确、功能强大、测角与测距高度集成的优点和其数字显示、双轴补偿、电子校准、数字传输等特点,仍然是测量工程界在城市数字测图中广泛采用的仪器,因此本文对全站仪在城市数字测图使用过程中的误差产生及大小进行分析,便于同仁参考。
1 全站仪测图点位中误差分析111 测角误差分析检验合格的全站仪水平角观测的误差来源主要有:(1)仪器本身的误差(系统误差)。
这种误差一般可采用适当的观测方法来消除或减低其影响,但在全站仪测图中对角度的观测都是半测回,因此,这里还是要考虑其对测角精度的影响。
分析仪器本身误差的主要依据是其厂家对仪器的标称精度,即野外一测回方向中误差M 标,由误差传播定律知,野外一测回测角中误差M 1测=2M 标,野外半测回测角中误差M 半测=2M 1测=2M 标。
(2)仪器对中误差对水平角精度的影响,仪器的中误差对水平角精度的影响在文献[1]中有很详细的分析,其公式为:M 中=ρe /2×S AB /S 1S 2其中e 为偏心距,在工作中的对中偏心距一般不会超过3mm,这里取e =3mm;S 1在这里取全站仪测图时的设站点(图根点)至后视方向(另一通视图根点)之间的距离:S 2取全站仪设站点至待测地面点之间的规范限制的最大距离。
由公式知,对中误差对水平角精度的影响与两目标之间的距离S AB 成正比,即水平角在180°时影响最大,在本文讨论中只考虑其最大影响。
(3)目标偏心误差对水平角测角的影响,文献[1]推导出的公式为m 偏=ρ2/2×(e 1/S 1)2+(e 2/S 2)2,S 1、S 2的取法与对中误差中的取法相同,e 1取仪器设站时照准后视方向的误差,此项误差一般不会超过5mm ,取e 1=5mm ,e 2取全站仪在测图中的照准待测点的偏差。
因为常规测图中棱镜中心往往不可能与地面点位重合,偏差为棱镜的半径R =50mm ,固取e 2=50mm 因为对中误差与目标偏心误差均为“对中”性质的误差,就对中本身而言,它是偶然性的误差,而仪器一旦安置完毕,测它们就会同仪器本身误差一样同时对测站上的所有测角发生影响,根据误差传播定律,则测角中误差M β=M 2中+M 2偏+M 2半测。
下面就以上分析,根据《城市测量规范》(以下简称《规范》)中给出的各比例测图,图根控制测量与各比例测图测距限值,通过计算得出表1。
表1比例e (mm )e 1(mm )e 2(mm )S 1(mm )S 2(mm )M 中"M 偏"M 标"M 测"M β"1:5003550801508.449.52450.451051.21:100035501502504.729.62430.251031.61:200035502504002.818.52419.151021.221第2期2007年6月 矿 山 测 量M I N E S URVEYI N G No 12Jun 12007112 全站仪测距的误差估计目前全站仪大多采用相位式光电测距,其测距误差可分为两部分:一部分是与距离D成正比例的误差,即光速值误差,大气折射率误差和测距频率误差;另一部分是与距离无关的误差,即测相误差,加常数误差,对中误差。
故,将测距精度表达式简写成M D=±(A+B×D),式中A为固定误差,以mm为单位,B为比例误差系数以mm/k m为单位,D为被测距离以km为单位。
目前测绘生产单位配备的测图用全站仪的测距标称精度大多为MD=3mm+2 mm/k m×D。
在这里D取测站点到待测点之间的《规范》规定的限值。
通过计算得到各比例尺测图中测距中误差值MD,如表2。
表2比例D/k m M D/mm1:5000.1503.31:10000.2503.51:20000.4003.8113 分析全站仪测图的点位中误差M根据前面对测角和测距精度的分析,运用误差传播定律来分析估计全站仪测图在工作中的实测点位中误差(相对于图根点)。
(1)建立定点(X,Y)与角度(β)、距离(D)之间的函数关系式,X=D cosβ,Y=D sinβ;(2)对上述函数关系式全微分,求出其真误差关系式:△X=cosβ△D-D×sinβ△β,△Y=sinβ△D+ D×cosβ△β(3)根据误差传播定律写出中误差平方关系式:M2x=co s2βM2D+D2sin2βM2βM2y=sin2βM2D+D2co s2βM2βM=±M2x+M2y=M2D+(D+Mβ)2,此式就是点位中误差与角度中误差Mβ,距离中误差MD 及距离D的关系式,根据此式及《规范》规定的D的限值,通过计算得出表3。
表3比例距离D M D标称测角精度"Mβ"M(mm)1:5001503.3250.436.8 5511237141:10002503.5230.236.8 531.638.51:20004003.8219.137.2 521.241.3 由以上分析及计算数据知,全站仪在测图运用中的点位精度远远优于《规范》给出的精度要求。
2 全站仪测图高程中误差分析众所周知,全站仪测图的高程为三角高程,而三角高程单向观测的高差计算公h=D×tanαv+(1-k)D2/2R+i-v,对公式进行全微分求出真误差关系式,然后根据误差传播定律求出中误差平方关系式为:M2h=(tanαv+(1-k)D/R)2M2D+(D×secαv)2Mαv+(D2/2R)2M2k+M2i+M2v。
由中误差平方关系式分析各变量的取值。
(1)分析竖角测角精度,全站仪的标称精度为M标,则测图中竖角的半测回中误差M半测=2M标(与前面水平角分析类似)。
(2)分析仪器高i与目标高v的量取精度,规范规定两次量取仪器高i与目标高v的差数不应超过3mm,即d≤3mm,运用误差传播定律同精度双观测求中误差公式则Mi=M v=[dd]2n=±2.1mm。
(3)分析大气垂直折光差系数误差,根据《规范》条文说明中对此项的分析,估计Mk=+0.05,(4)在城市数字测图中地形的起伏一般不会超过25°这里取αv=25°由于测图中地面点高程H的精度是相对于图根控制点而言的,即图根控制点高程可视为真值,则M H=M h根据以上分析与取值,计算得表4。
表4比例D M D M i M v M k M标M半测M H(mm) 1:5001503.32.12.10.05244.6510817 1:10002503.52.12.10.05246.35101318 1:20004003.82.12.10.05249.15102117 由表格数据知,全站仪测图地面点高程精度远优于《规范》规定的限差。
但在实际工作中由于地面土质的影响,以及有些点不方便目标的放置等因素的影响,导致棱镜中心至地面的高度有误差,所以实际工作中的高程误差要高于以上误差估计。
3 结 论(1)城市大比例数字测图,用全站仪完全满足《规范》要求。
(下转第34页)31第2期 杨文府等:全站仪在城市数字测图中的误差分析与估计 2007年6月和>100‰划分为4种损坏等级。
地下潜水位埋深和作物生长密切相关。
相关研究表明,地下潜水位埋深115m时作物生长最盛。
地下潜水位较深的耕地可以通过灌溉措施弥补作物的水分需求,但地下潜水位埋深较浅时就容易使作物受涝灾减产甚至死亡。
所以,建议以地下潜水位埋深115m为耕地损坏下限、地表长期积水土壤生产力完全丧失作为上限,把开采地表下沉后当年地下潜水位最小埋深按110~115m、015~110m、0~015m和<0m划分为4个耕地损坏等级。
农田水利设施是土壤生产力的一个重要组成部分。
灌溉渠道或机井等农田水利设施在开采引起的地表沉陷过程中可能会发生开裂或错位现象,影响了作物抵御旱涝灾害的能力,土壤生产力受到严重制约。
农田水利设施损坏程度不好量化,可否按基本完好、部分损坏和完全损坏等3种损坏等级,具体损坏程度需现场综合确定。
以上评价参数汇总于表1。
表1 开采沉陷耕地损坏等级表损坏等级损坏程度评价参数裂缝宽度/台阶高度(c m)附加坡度(‰)潜水位埋深(m)水利设施损坏分类Ⅰ土壤生产力降低25%<20/<10<20110~115基本完好轻度损坏Ⅱ土壤生产力降低50%20~50/10~3020~50015~110部分损坏中度损坏Ⅲ土壤生产力降低75%50~100/30~8050~1000~015完全损坏严重损坏Ⅳ土壤生产力降低100%>100/>80>100<0-完全损坏注:上述耕地损坏评价参数可选用损坏主导因子值,也可同时使用,当同一耕地采用不同的评价因子出现不同结果时,应选取损坏等级较高值。
3 结 语开采沉陷对耕地损坏评价体系的建立是耕地损坏范围圈定、耕地损坏补偿和土地复垦方式选择的重要参考。
该方法充分反映了开采沉陷对耕地损坏特征及其损坏机理,且评价指标数据易于获得,在实际操作中具有很强的操作性。
由于本文相关评价参数值的确定主要来源于作者常年从事开采沉陷及土地复垦工作的实践经验,某些数据还缺乏相应的科研支持,建议今后加强这方面的科学研究力度。
希望本文提出的开采沉陷对耕地损坏评价方法能够为相关评价体系的制定提供一些参考。
作者简介:李树志(1960-),男,河北定州人,研究员,博士研究生。
煤炭科学研究总院唐山研究院矿山测量研究所所长。
主要从事土地复垦、生态重建、“三下”开采等研究工作,公开发表论文41篇。
(收稿日期:2007-03-01)(上接第13页)(2)在数字测图中,点位误差主要是测角误差引起得,因此在操作中应注意提高测角精度。
(3)全站仪测图的点位和高程精度都随距离的延长而降低,其测距长度按上表分析在接近《规范》限差时要适当减小。
(4)在全站仪中应设置球气差改正,以便使测量成果特别是高程更接近真实值;(5)用全站仪半测回方向城市数字测图其点位精度不仅满足地形测量的要求,而且也达到地籍测量界址点精度的要求,但难以满足房产测量界址点精度的要求。