第9章 光学系统的像差
光学像差实验报告总结(3篇)
第1篇一、实验目的本次实验旨在通过光学像差实验,加深对光学像差的理解,掌握光学像差的基本原理和分类,并学会使用光学仪器测量和评估光学系统的像差。
二、实验原理光学像差是光学系统中存在的缺陷,会导致成像质量下降。
根据像差与颜色是否有关、像差是轴上点产生的还是轴外点产生的,可以将像差分为多种类型,如球差、慧差、像散、场曲、畸变等。
三、实验仪器与材料1. 光学系统:包括透镜、反射镜、光阑、光束整形器等;2. 光源:激光器;3. 探测器:光电探测器;4. 仪器:成像系统、光束整形器、光路控制器等。
四、实验内容1. 实验一:测量球差(1)搭建实验光路,将光源、透镜、光阑、探测器等按顺序连接;(2)调整光路,使光线通过透镜后聚焦到探测器上;(3)改变物距,记录不同物距下探测器的信号强度;(4)分析信号强度与物距的关系,得出球差值。
2. 实验二:测量慧差(1)搭建实验光路,将光源、透镜、光阑、探测器等按顺序连接;(2)调整光路,使光线通过透镜后聚焦到探测器上;(3)改变光轴倾斜角度,记录不同倾斜角度下探测器的信号强度;(4)分析信号强度与倾斜角度的关系,得出慧差值。
3. 实验三:测量像散(1)搭建实验光路,将光源、透镜、光阑、探测器等按顺序连接;(2)调整光路,使光线通过透镜后聚焦到探测器上;(3)改变光轴倾斜角度,记录不同倾斜角度下探测器的信号强度;(4)分析信号强度与倾斜角度的关系,得出像散值。
4. 实验四:测量场曲(1)搭建实验光路,将光源、透镜、光阑、探测器等按顺序连接;(2)调整光路,使光线通过透镜后聚焦到探测器上;(3)改变物距,记录不同物距下探测器的信号强度;(4)分析信号强度与物距的关系,得出场曲值。
5. 实验五:测量畸变(1)搭建实验光路,将光源、透镜、光阑、探测器等按顺序连接;(2)调整光路,使光线通过透镜后聚焦到探测器上;(3)改变物距,记录不同物距下探测器的信号强度;(4)分析信号强度与物距的关系,得出畸变值。
光信息技术9 光学系统像差理论综合实验

实验九光学系统像差理论综合实验(一)光学系统像差的计算机模拟如果成像系统是理想光学系统,则同一物点发出的所有光线通过系统以后,应该聚焦在理想像面上的同一点,且高度同理想像高一致。
但实际光学系统成像不可能完全符合理想,物点光线通过光学系统后在像空间形成具有复杂几何结构的像散光束,该像散光束的位置和结构通常用几何像差来描述。
一、实验目的1.掌握各种几何象差产生的条件及其基本规律;2.观察各种象差现象的计算机模拟效果图。
二、实验原理光学系统所成实际象与理想像的差异称为像差,只有在近轴区且以单色光所成像之像才是完善的(此时视场趋近于0,孔径趋近于0)。
但实际的光学系统均需对有一定大小的物体以一定的宽光束进行成像,故此时的像已不具备理想成像的条件及特性,即像并不完善。
可见,象差是由球面本身的特性所决定的,即使透镜的折射率非常均匀,球面加工的非常完美,像差仍会存在。
几何像差主要有七种:球差、彗差、像散、场曲、畸变、位置色差及倍率色差。
前五种为单色像差,后二种为色差。
1.球差轴上点发出的同心光束经光学系统后,不再是同心光束,不同入射高度的光线交光轴于不同位置,相对近轴像点(理想像点)有不同程度的偏离,这种偏离称为轴向球差,简称球δ')。
如图1-1所示。
差(L图1-1 轴上点球差2.慧差彗差是轴外像差之一,它体现的是轴外物点发出的宽光束经系统成像后的失对称情况,彗差既与孔径相关又与视场相关。
若系统存在较大彗差,则将导致轴外像点成为彗星状的弥散斑,影响轴外像点的清晰程度。
如图1-2所示。
图1-2 慧差3.像散像散用偏离光轴较大的物点发出的邻近主光线的细光束经光学系统后,其子午焦线与弧矢焦线间的轴向距离表示:tst s x x x '''=- 式中,t x ',sx '分别表示子午焦线至理想像面的距离及弧矢焦线会得到不同形状的物至理想像面的距离,如图1-3所示。
图1-3 像散当系统存在像散时,不同的像面位置会得到不同形状的物点像。
光学系统成像的像差的描述

光学系统成像的像差的描述在光学系统中,成像的品质受到多种因素的影响,其中最主要的因素之一就是像差。
像差是指光学系统由于各种原因导致成像结果与理想成像结果的差异。
在实际应用中,我们需要尽可能减小像差,以获得清晰、准确的成像。
1.球差球差是由于光线通过透镜时,不同离轴位置的光线聚焦点与光轴上的光线聚焦点不一致而产生的像差。
球面透镜会使离轴光线聚焦于球心之前或之后,从而导致像差。
为了减小球差,可以采用非球面透镜或者多个球面透镜组合的方法。
2.色差色差是指不同波长的光线通过透镜后,其聚焦点位置不同所引起的像差。
由于光线的折射率随着波长的不同而变化,所以不同波长的光线在经过透镜后会有不同的折射效果,从而导致色差。
为了减小色差,可以采用消色差透镜、复合透镜等方法。
3.像散像散是指透镜或者光学系统在聚焦光线时,不同位置的光线聚焦点不在同一平面上而产生的像差。
像散分为径向像散和切向像散两种。
径向像散是指光轴上的光线与离轴光线在像平面上的聚焦点不一致,而切向像散则是指光轴上的光线与离轴光线在像平面上的聚焦点不在同一条直线上。
为了减小像散,可以采用适当的光学元件,如棱镜等。
4.畸变畸变是指光学系统在成像过程中,使得直线或者平面失真的现象。
畸变分为径向畸变和切向畸变两种。
径向畸变是指光线通过光学系统后,离轴的像点与光轴上的像点之间的距离不一致,而切向畸变则是指光线通过光学系统后,离轴的像点与光轴上的像点之间的位置关系不一致。
为了减小畸变,可以采用非球面透镜或者适当的校正方法。
5.散焦深度散焦深度是指光学系统在成像过程中,能够保持清晰成像的距离范围。
当物体与透镜或者光学系统的距离超出散焦深度时,成像会变得模糊不清。
散焦深度受到孔径大小和焦距的影响。
为了增加散焦深度,可以使用小孔径和长焦距的透镜。
光学系统成像的像差是由于光线经过透镜或者光学系统时,由于各种因素导致成像结果与理想成像结果的差异。
常见的像差包括球差、色差、像散、畸变和散焦深度等。
(完整版)光学系统与像差全套答案

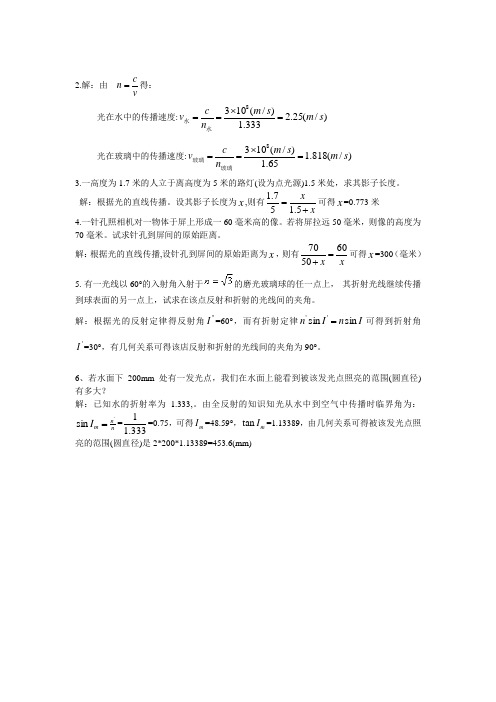
2.解:由vcn =得:光在水中的传播速度:)/(25.2333.1)/(1038s m s m n c v =⨯==水水光在玻璃中的传播速度:)/(818.165.1)/(1038s m s m n c v =⨯==玻璃玻璃3.一高度为1.7米的人立于离高度为5米的路灯(设为点光源)1.5米处,求其影子长度。
解:根据光的直线传播。
设其影子长度为x ,则有xx+=5.157.1可得x =0.773米 4.一针孔照相机对一物体于屏上形成一60毫米高的像。
若将屏拉远50毫米,则像的高度为70毫米。
试求针孔到屏间的原始距离。
解:根据光的直线传播,设针孔到屏间的原始距离为x ,则有xx 605070=+可得x =300(毫米)5. 有一光线以60°的入射角入射于的磨光玻璃球的任一点上, 其折射光线继续传播到球表面的另一点上,试求在该点反射和折射的光线间的夹角。
解:根据光的反射定律得反射角''I =60°,而有折射定律I n I n sin sin ''=可得到折射角'I =30°,有几何关系可得该店反射和折射的光线间的夹角为90°。
6、若水面下200mm 处有一发光点,我们在水面上能看到被该发光点照亮的范围(圆直径)有多大?解:已知水的折射率为 1.333,。
由全反射的知识知光从水中到空气中传播时临界角为:nn m I 'sin ==333.11=0.75,可得m I =48.59°,m I tan =1.13389,由几何关系可得被该发光点照亮的范围(圆直径)是2*200*1.13389=453.6(mm)7、入射到折射率为的等直角棱镜的一束会聚光束(见图1-3), 若要求在斜面上发生全反射,试求光束的最大孔径角解:当会聚光入射到直角棱镜上时,对孔径角有一定的限制,超过这个限制,就不会 发生全反射了。
由nI m 1sin =,得临界角 26.41=m I 得从直角边出射时,入射角74.34590180=---=m I i由折射定律nU i 1sin sin =,得 5.68U =即 11.362U =8、有一光线入射于和的平面分界面上, 平面的法线为,求反射光线和折射光线。
光谱仪器的光学系统-像差

子午光线对交点离开主光线的垂直距离K 用来 子午光线对交点离开主光线的垂直距离 T’用来 表示此光线对交点偏离主光线的程度
像面 入瞳 KT’
而弧矢光线对的交点离开主光线的垂直距离 Ks’用来表示此光线对交点偏离主光线的程度。 用来表示此光线对交点偏离主光线的程度。 用来表示此光线对交点偏离主光线的程度
1、球差: 球面像差的简称 球差:
以孔径角U 入射光线的高度为h 对应的球差称为 以孔径角 max入射光线的高度为 max,对应的球差称为 全孔径(边光) 全孔径(边光)球差 以孔径角U入射光线的高度为 以孔径角 入射光线的高度为h 入射光线的高度为 孔径或 带光 带光( 若h/hmax=0.7,则称为 孔径或0.7带光(相应的球差 ,则称为0.7孔径 为带光球差) 为带光球差)
光学系统中对某一给定孔径的光线达到 δL’ =0的系统称为消球差系统 的系统称为消球差系统 的系统称为 单透镜的球差与焦距、 单透镜的球差与焦距、相 对孔径、 对孔径、透镜的形状及折 射率有关。 射率有关。 对于给定孔径焦距和折射率 的透镜, 的透镜,通过改变其形状可 使球差达到最小。 使球差达到最小。
彗差对于大孔径系统和望远系统影响较大
彗差的大小与光束宽度、物体大小、光阑位置、 彗差的大小与光束宽度、物体大小、光阑位置、 光组内部结构(折射率、曲率、孔径) 光组内部结构(折射率、曲率、孔径)有关 对于某些小视场大孔径的系统(如显微镜), 对于某些小视场大孔径的系统(如显微镜), 常用“正弦差”来描述小视场的彗差特性。 常用“正弦差”来描述小视场的彗差特性。 正弦差等于彗差与像高的比值,用符号 正弦差等于彗差与像高的比值,用符号SC’表示 表示
折射后的成像光束与主光束 OBY’失去了对称性。 失去了对称性。 失去了对称性 在折射前主光线是光束的轴线, 在折射前主光线是光束的轴线, 折射后主光线就不再是光束轴线。 折射后主光线就不再是光束轴线。 不同孔径的光线在像平面上形 成半径不同的相互错开的圆斑。 成半径不同的相互错开的圆斑。
《光学系统像差》课件

4
影响像散的产生。
通过使用复合透镜、特殊设计的光路等方式 可以矫正像散。
五、畸变
定义
畸变是指光线通过透镜或系统时,由于光线的折射 和传输特性而导致的成像偏差。
分类
常见的畸变类型包括径向畸变、切向畸变等。
影响因素
透镜形状、光线入射角度等因素会影响畸变的产生。
矫正方法
通过优化透镜设计、使用矫正透镜等方法可以减小 畸变。断发展,光学系统像差矫正的效果将越来越好。
3 经验分享
分享光学系统设计和优化的经验,以便读者能够更好地理解和应用光学系统像差知识。
八、答疑交流
提问与解答
听众可以提出问题,我将尽力解答他们的疑问。
提供资源
分享与光学系统像差相关的文献、网站和工具资源。
实践体验分享
六、综合性能分析
综合评价指标
综合性能分析包括分析分辨率、 光点扩散函数等评价指标。
系统设计思想
合理设计光学系统成像路径,优 化透镜材料选择和形状设计,提 高系统的成像质量。
实例分析
以实际光学系统为例,分析其成 像性能并进行优化改进。
七、总结
1 相关应用领域
光学系统像差的理解和矫正对于摄影、显微镜、望远镜等领域都具有重要意义。
与听众分享实际应用中的案例和体验,促进相互学习和交流。
影响
球差会导致成像模糊、变形等问题,降低光学系统 的成像质量。
形成原因
球面镜的形状不完美或光线入射角度不同会导致球 差产生。
矫正方法
通过使用非球面镜、球差矫正片等方法可以矫正球 差。
三、色差
定义
色差是指由于不同波长的光在透镜或系统中通过时折 射率不同而产生的色差现象。
常见类型
光学系统波像差

光学系统波像差
波像差是指光学系统中光的波前发生畸变的现象。
在理想的光学系统中,光波的波前应该是一个平面,这样可以确保光线在系统中均匀传播,形成清晰的图像。
然而,在现实情况下,光学系统的元件(如透镜、反射镜等)的形状、材质等因素会导致光波的波前发生畸变。
波像差会影响光学系统的成像质量和分辨率。
波像差可以分为以下几类:
1. 球差:由于透镜或反射镜的形状为球面,光线在通过这些元件时会产生球差。
球差会导致成像模糊,特别是在光圈较大的情况下。
2. 彗差:彗差是由于透镜或反射镜的形状不对称导致的。
彗差会影响成像的对比度,特别是在图像的边缘区域。
3. 像散:像散是由于透镜或反射镜的材料的色散特性导致的。
像散会导致不同颜色的光线在成像平面上聚焦在不同位置,从而产生色斑。
4. 畸变:畸变是由于透镜或反射镜的形状或位置导致的。
畸变会影响成像的几何形状,使成像产生形变。
5. 场曲:场曲是由于透镜或反射镜的形状或位置不均匀导致的。
场曲会导致成像在不同位置处的焦距不同,从而影响成像的清晰度。
波像差的分析和矫正是光学系统设计和制造的关键问题。
通过采用高质量的光学元件、优化光学系统的结构以及使用波前校正技术,可以有效地降低波像差,提高光学系统的成像质量和分辨率。
光学系统的像差基础

O1 A
b
d ae c
A
b
e a d c
a -主光线 b -上光线 c -下光线 d -前光线 e -后光线
(2)、子午像点及其计算
入瞳D
P At' As' O1 t'
A
n' cos2 I ' - n cos2 I n' cos I '-n cos I
t'
t
r
(3)、弧矢像点及其计算
-xt'
四、畸变-光学系统的像差基础
1、一般描述
轴外物点的主光线
和高斯像面的交点
高度与其高斯像高 的差别,即为畸变。 -y
入瞳D 出瞳D'
y'
y0'
2、表示
A
dy' y'- y0 '
相对畸变 q' ( y'- y0 ') / y0 ', q' ( - 0 ) /
正畸变
(枕形畸变) 负畸变
一、像差的一般概念-光学系统的像差基础
1、像差 在光学系统中,实际像与理想像的偏差。
2、像差分析方法 几何像差法:以特征光线经过光学系统后
出射光线在横向或纵向与理想像的偏差 分析像差的方法。 波像差法:以波动光学为基础,以实际波 面和同位相的理想像的波面的偏差分析 像差的方法。 3、像差的分类:
单色像差 (球差、彗差、场曲、像散和畸变 ) 像差
入瞳D
P
As'
O1 s'
A
n' - n n'cosI '-n cosI
s' s
应用光学 第九章

i 1
i 1
k S II
i 1
k i 1
SI
iz i
k S III
i 1
k i 1
S II
iz i
SI
i
2 z
i2
k S IV
i 1
k
J2
i 1
n n nnr
k
k
SV
i 1
i 1
SIII SIV
iz i
3. 初级球差:
L 1
2nu2
k
SI
i 1
4. 初级彗差:
KT
M CI
m1
M h2 m1
5. 密接薄透镜系统消初级位置的色差条件:
M
CI
m1
h2
1 1
2 2
M M
0
对双胶合或双分离物镜: 1 2 0 1 2 1 2
1
2
1 1 2
2 1 2
例:设计一个消色差的双胶合望远物镜,选用F2 (nD=1.6128,VD=36.9)和K9(nD=1.516,VD=64.1)两 种玻璃,设物镜的焦距为150mm,要求在近轴区消除位 置色差,确定两块正负透镜的焦距f1′、 f2′。
3. 光学系统结构对彗差的影响(对单个折射面):
1)入瞳面在折射球面球心之前: KT′<0; 2)入瞳面在折射球面球心处: KT′=0; 3)入瞳面在折射球面球心之后: KT′>0。
4. 弧矢彗差:点BS′到主光线的垂直于光轴方向的距离为弧矢彗 差,以KS′表示。
§ 9-5 正弦差
1. 正弦条件(不晕成像):轴上点及近轴外点均理想成像
长,它们的象点离透镜由近到远地排列在光轴上,这种现象就是位
光学系统像差

手术方法
• 1.
波前相差数据的选择:波前检查数据的是否准确,直接影响手术效果,因此,正确 的选择波前检查数据至关重要。一般情况下,每只眼应进行3-5次检查,如果重复性很 高,可被接受。否则,应重复检查,直到达到满意效果。在比较各次检查结果时,尤 其应注意比较视觉影响最大的相差成分,如慧差、球差、等如果可能的话,最好能检 查每次检查的原始图象。 2. 切削中心确定:传统的LASIK对偏中心有一定容忍度,一般来说,偏中心切削小于 0.5mm则不会明显影响术后视力(但会引起慧差增加,视觉质量下降)但波前像差引 导的个体化切削则对切削区中心的准确性有很高的要求。有研究报道,偏中心0.1 mm 即可对高阶像差的矫正产生影响。临床上尚无理想的的定位方法,(有十字、瞳孔中 心、虹膜定位)尽管存在误差,目前仍采用术中目测定位、对准瞳孔中心的办法,值 得注意是许多激光系统虽可以自动确定瞳孔中心,往往由于前房深度、红外照明情况、 图象对比度等差异而存在误差。因此术中应于纠正。此外,多数情况下波前相差是术 前散瞳下检查,而手术在自然情况下,瞳孔中心往往不一致,60%散瞳前后差0.1mm 在这种情况下则需做出相应调整。 3. 参考标记:术前标记3、9点位。术中/根据显微镜的刻度作出调整,某些虹膜识别 技术,减少眼球旋转的影响。 4. 手术参数的调整:与传统方法不同也需要参数调整,在调整参数前,应对环境(湿 度)角膜刀、角膜床暴露时间、等影响因素尽量控制一致。
像差表示方法
波前可以被分解为基本的形状 (Zernike 多项式)
Renzo Mattioli, PhD
临床应用
• 1.总体高阶像差大,6mm瞳孔时,总体高 阶像差的RMS值超过0.2um • 2.以前因屈光手术不理想造成的显著的球 差和慧差增加者 • 3.暗光下具有ቤተ መጻሕፍቲ ባይዱ瞳孔的年轻人和需要夜间 开车的人。
以下光学系统成像的像差的描述

以下光学系统成像的像差的描述
以下是光学系统中常见的像差描述:
1.球差:由于光线在透镜不同位置通过时会发生不同的折射,导致焦距随着孔径的变化而变化,从而使成像位置产生偏移。
2.彗差:光线通过凸透镜时,边缘的像点会比中央的像点更靠近透镜的轴线,导致成像位置不准确。
3.色差:由于不同波长的光线在透镜中的折射率不同,导致不同颜色的光线聚焦位置不同,从而产生颜色的像差。
4.畸变:透镜或镜面的形状不完美,导致成像时会出现图像的畸变,如桶形畸变和枕形畸变等。
5.像散:由于光线经过透镜时的色散效应,不同波长的光线在成像平面上产生不同的焦点位置。
6.像场弯曲:不同位置的光线在透镜中会有不同的折射角度,从而导致成像平面上的像点不在同一平面上。
7.像散(球差散):由于透镜球面折射的不均匀性,不同孔径处的像点在成像平面上会呈现散焦状态。
8.辐散:成像平面上的像点的直径会在离轴处发生扩散,导致成像质量下降。
9.像场曲率:成像平面上不同位置对应的焦距不同,导致图像在边缘处出现失真。
以上是常见的光学系统成像的像差的描述,不同像差的影响程度和解决方法也不同,工程师需要根据具体情况进行优化和校正。
光学系统的像差

25
位置色差是描述2种色光对轴上物点成像 位置差异的色差。
26
正透镜位置色差图示
白光 A
C
F AC′
AF′
LF LC
-LFC
27
P
径轴 光上 线物 不点 聚发 焦出 于的 一大 点孔
28
负透镜位置色差图示
A
LFC -LF -LC
-L
29
因色差的存在,轴上点成像是一个弥散斑 , 在a点和在c点看到的弥散斑颜色有何不同?
B
17
弧矢彗差:弧矢面上前、后光线的交点BS′到主 光线在垂直光轴方向的偏离,称为弧矢彗差,用
符号KS′表示。
18
19
畸变的产生
对于一般实际光学系统来说,只有在近 轴区垂轴放大率才是常数。当视场增大时, 像的垂轴放大率便会随视场变化而异,这将 会使像相对于原物失去相似性。这种使像变 形的成像缺陷就称为畸变。
33
上排为位置色差,下排为球差,两者均为轴上像差
34
35
倍率色差
此是一种因不同色光成像的高度(也即 倍率)不同而造成的像大小差异的色差。
它是以两种色光(此即F光和C光)的 主光线在高斯像面上的交点高度之差来度量, 以符号YFC′表示之。
36
倍率色差图示
入瞳 A
-YFC
BC′ C
F
BF′ YF YC
41
像散和场曲
轴外物点发出的同心 光束,由于此斜向细 光束的子午面和弧矢 面相对折射球面的位 置不同,使子午和弧 矢面在球面上的截线 曲率不同。使水平方 向和竖直方向的光线 的聚焦点在不同平面 上
42
(2)像散(轴外点细光束)
TS
像 面
物
光学系统与像差全套答案
5.用作图方法求解。
6.一透镜对无限远处和物方焦点前5m处的物体成像时,二像的轴向间距为3mm, 求透镜的焦距。
解:由薄透镜的物象关系
,对于无限远 ,则
对物方焦点前物体 l=-5+f, l,
代入 可得f'=122.474mm
7.位于光学系统之前的一个20mm高的物体被成一12mm的倒立实像。当物向系统方向移动100mm时,其像成于无穷远,求系统的焦距。
2.解:由 得:
光在水中的传播速度:
光在玻璃中的传播速度:
3.一高度为1.7米的人立于离高度为5米的路灯(设为点光源)1.5米处,求其影子长度。
解:根据光的直线传播。设其影子长度为 ,则有 可得 =0.773米
4.一针孔照相机对一物体于屏上形成一60毫米高的像。若将屏拉远50毫米,则像的高度为70毫米。试求针孔到屏间的原始距离。
(2)由 ,得到 ,即若欲使光轴向上、向下各偏移5mm,平板应正、反转过0.25rad角度.
8.有一等边折射三棱镜,其折射率为1.65,求1)光线经该棱镜的二个折射面折射后产生最小偏角时的入射角;2)最小偏角值。
解:
(1)如上图,因为仅当 时,才产生最小偏向角,由公式 ,可得I1=55.6度
(2)如上图,根据折射定律,可得最小偏向角与 , 的关系 ,把 , 带入上式,可解得最小偏向角δm=51.2度。
解:
因为
所以
所以
=
所以由矢量形式的折射定律
=
矢量形式的反射定律
=
1.有一直径为100mm、折射率为1.5的抛光玻璃球,在视线方向可见球内有二个气泡,一个位于球心,另一个位于球心与前表面间的一半处。求二个气泡在球内的实际位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第 九 章 光学系统的像差
9.1
三、光学系统的 球差分布公式
1、原理分析
L L+ L
'
'
*
含义: L 包含了前面几个面的球差贡献 L * L 及该折射面本身所产生的球差
nu sin u = ' ' 其中: ' 为转面倍率 n u sin u
. 应用 . 光学
第 九 章 光学系统的像差
9.1
2、球差分布公式
克莱伯公式: 单个折射球面的球差表示式为:
整个系统的球差表示式为:
或:
. 应用 . 光学
第 九 章 光学系统的像差
9.1
四、单个折射球面的球差分布系数,不晕点 经过推导,可得到单个折射球面的球差分布系数
PA校对法
令上式为零:可以得到一下三个无球差点
第一:L=0,此时L’必为零,故物点、像点和顶点 重合。 第二:sinI-sinI’=0,这个条件只能在I’=I=0时才 能满足,相当于光线与球面法线重合,物点 像点和球面中心重合,此时L=L’=r; 第三:sinI’-sinU=0,则I’=U;
五、单个折射球面的球差正负和物体位置的关系
. 应用 . 光学
第 九 章 光学系统的像差
9.1
一、球差的定义及其计算
1、轴向像差:由轴上点发出的同心光束,经光学系统 各个折射面折射后,不同孔径角的交线交于不同点,相 对于理想像点的位置有不同的偏离,这就是球面像差。
L L l
' '
'
实际像点与理想像点的沿轴距离
L a1U a2U a3U
' ' 2 1 4 1 6 1
L Ah A h A h
2 1 1 4 2 1 6 3 1
初级像差
二级像差
三级像差
高级像差
球差表达式也可以采用相对孔径展开
h 2 h 4 L A1 ( ) A2 ( ) + hm hm
. 应用 . 光学
. 应用 . 光学
第 九 章 光学系统的像差9.1此时,有 得由
得
结论:1)由L’和L的关系可知,它们都在球心的同侧,或 是实物成虚像,或是虚物成实像。 2)由L’和L的关系可知,可得:nL nL
sin U sin I n L 则 sin U sin I n L
n n Lr sin I sin I sin U n n r n n L r n I ' U I U n n L r n
表明:这一对共轭点无论U多大,比值始终保持常数,故 不产生球差,这一对共轭点称为不晕点或者叫齐明点
. 应用 . 光学
第 九 章 光学系统的像差
9.1
五、单个折射球面的球差正负和物体位置的关系 上面对单个折射球面给出了三对无球差共轭点 的位置,这样就可以把由负无穷到正无穷的整个 空间分为四个以无球差点为界的区间
应用 光学
第 九 章
轴上点像差 彗差 像散和像面弯曲 畸变 正弦差 位置色差 倍率色差
光 学 系 统 的 像 差
. 应用 . 光学
第 九 章 光学系统的像差
9.1
一、球差的定义及其计算 二、球差的性质及表达式 三、光学系统的球差分布公式 四、单个折射球面的球差分布系数,不晕点
. 应用 . 光学
第 九 章 光学系统的像差
9.1
2、垂轴像差:由于球差的存在,在高斯像面上的像 点已不是一个点,而是一个圆形的弥散斑。
y L tan U (L l ) tan U
' ' ' ' '
'
二、球差的性质及表达式
. 应用 . 光学
第 九 章 光学系统的像差
9.1
一般以(1,0.85,0.707,0.5,0.3,0)为典型光 线作图,孔径边缘上的光为边光,位于某一个孔径带的光 为带光,当用一个屏上所得到的像为不同大小的弥散斑, 有一个最小弥散斑的位置,但无论如何在屏上任何位置都 不能成为一个几何点。 相对孔径
n n n sin I sin I sin I ' sin I sin I ( ' ) n n
' '
. 应用 . 光学
第 九 章 光学系统的像差
9.1
与i相同,即物点位于第二区间时sinI-sinI’恒为 负,其他区间为正值。 第四个因子sinI’-sinU可表示为
' n n L r n L n n sin I ' sin U ' sin I sin U ' sin U sin U ' ( )sin U n n r n r n
=0.3 =0
U =U0.5,h=h0.5,L'0.5 , l ' , L'0.5 U =U0.3,h=h0.3,L'0.3 , l ' , L'0.3
. 应用 . 光学
第 九 章 光学系统的像差
9.1
从图中可以看出球差的性质如下: 球差是入射高度h(u)的函数 球差具有对称性 球差与视场无关 单正透镜产生负球差,单负透镜产生正球差
. 应用 . 光学
第 九 章 光学系统的像差
9.1
1)当r>0时,PA>0和n’>n时,可知: 第一个因子LsinU,因为PA>0,根据PAcos(U-I)/2 可知,无论物点位于哪个区间,LsinU恒为正值。 第二个因子i,与符号sinI同号,其符号随物体的 区间而异,在第二个区间(0<L<r)为负,其他区间为 正。(根据符号规则判定) 第三个因子sinI-sinI’。当sinI>sinI’,光线起 会聚作用,反之sinI<sinI’,光线起发散作用
sin U h 或 sin U m hm
例
sin U h 或 =1 sin U m hm
边光 U =Um,h=hm,L' , l ' , L'm
带光 =0.85 U =U0.85,h=h0.85,L'0.85 , l ' , L'0.85 =0.707 U =U0.707,h=h0.707,L'0.707 , l ' , L'0.707 =0.5
' L “消球差”:使 L 0 ,注意由于 是不同的,因
'
此不能使所有的孔径(带)球差为零,一般只能 使一个孔径(带)球差为零,当边缘孔径的球差 不为零时,光学系统有负值球差存在称为“校正不 足”,有正球差存在称为“校正过头”。
. 应用 . 光学
第 九 章 光学系统的像差
9.1
球差表达式(级数展开的方法)