防抱制动系统计算机动态模拟
自动紧急制动系统的实时响应与控制

自动紧急制动系统的实时响应与控制自动紧急制动系统(Automatic Emergency Braking System,简称AEB)是一种基于车载传感器和控制器的智能安全系统,旨在帮助驾驶员防止碰撞事故或减轻碰撞的严重程度。
本文将探讨AEB的实时响应和控制的关键技术及其优势。
一、AEB的实时响应技术AEB系统通过车载传感器和算法实时感知道路和交通状况,并对潜在的碰撞风险作出快速而准确的响应。
1. 感知技术AEB系统采用多种传感器,如摄像头、激光雷达和毫米波雷达等,来感知周围环境。
摄像头可以识别前方交通标志、行人、车辆等,激光雷达和毫米波雷达可以测量距离、速度和方向等重要信息。
这样的多传感器组合能够提供更全面、准确的环境感知。
2. 碰撞预警当AEB系统感知到潜在的碰撞危险时,会通过声音、光信号或震动等方式发出警告,提醒驾驶员采取措施。
预警系统能够有效降低驾驶员的反应时间,并帮助减少事故的发生。
3. 紧急制动控制如果驾驶员没有足够的反应时间或未能采取适当的措施来避免碰撞,AEB系统会自动进行紧急制动。
通过车载控制器对制动系统进行精确的控制,AEB系统能够实现极短的制动响应时间,从而减少碰撞的严重程度。
二、AEB的控制策略为了保证AEB系统的安全和可靠性,需要设计合理的控制策略来确保系统能够正确识别和响应各种交通场景和危险情况。
1. 碰撞风险评估AEB系统需要对周围的交通状况进行实时评估,并预测可能的碰撞风险。
基于传感器数据和算法模型,系统可以对行人、车辆和障碍物进行识别,并根据其位置、速度和加速度等信息判断碰撞风险的程度。
2. 制动控制策略AEB系统的制动控制策略应该根据碰撞风险评估结果来调整制动力的大小和时机。
在潜在碰撞风险较高的情况下,系统会选择更强的制动力并在更短的时间内施加,以最大程度地减少碰撞的严重程度。
3. 人机交互界面为了保证驾驶员能够正确理解和相应AEB系统的提示和警告,人机交互界面的设计也很重要。
VC++在汽车ABS动态性能测试中的应用

11 71
拎
煳 c
}
பைடு நூலகம்
机
+
汽 车 防 抱 制 动 系统 ( B ) A S 主要 由 传 感 器 、 制 器 与 压 力 调 控 节 器 组 成 。 通 过 轮速 传 感 器 感 知 汽 车 的 运 动 状 态 , 它 由电 子 控 制
V (
送 于 AB 电子 控 制 器 。 S ( ) 据 采 集 部 分 2数
调节器制动器加在模拟车轮上 , 实现制动。A S通过轮速传感 器 B 感知到轮速信号 , 再通过压力调节器控制压力变化来影响制动效
果 。与此 同时 , 动 管 道上 各 个 压 力传 感 器 的 电 压信 号 通 过 数 据 制
s sem ( S fCas e lain a tmo i B fts y tm a tmain nelcu l ain y tr AB )o r.R ai t uo bl A S o e ts se uo t ,itl tai t z o e o e z o
K y r sV + p r r n e t s, t l c u l a inAB e wo d : C+ , e f ma c e t ne l ta i t , S o i e z o
维普资讯
V + C+ 在汽车 AB S动态性能测试 中的应用
V + 任汽车 A S动态性能测试中的应用 C+ B
Ap ia in fVC++ S f pl t o c o o t e Te t g war s i Dy a c P r r n e n n mi e f ma c o
田 1 汽车 A BS制 动 系 统动 态性 能 数 据 采 集 系 统
基于MATLAB和3DSMAX的汽车防抱制动三维动画仿真 (1)

2007年4月第35卷第4期机床与液压MACH I N E T OOL &HY DRAUL I CSAp r 12007Vol 135No 14基于MAT LAB 和3DSMAX 的汽车防抱制动三维动画仿真邓英华,王纪森(西北工业大学自动化学院,西安710072)摘要:汽车防抱制动系统是现代汽车的制动系的关键部件之一,在汽车制动的过程中,该机构可以避免车轮完全抱死,提高汽车的方向稳定性和转向操纵能力,缩短制动距离。
本文在对汽车制动过程进行数学建模的基础上,利用MAT 2LAB 对汽车制动过程进行仿真,得到汽车制动仿真曲线,并应用3DS MAX 动画技术对整个防抱制动过程进行了真实的再现,克服了以往采用MAT LAB 仿真不够直观的不足,其仿真效果很好。
关键词:防抱制动系统;MAT LAB;3DS MAX;仿真中图分类号:TP39119 文献标识码:A 文章编号:1001-3881(2007)4-209-3S i m ul a ti on of ABS Ba sed on M ATLAB &3D S M AXDENG Yinghua,WANG J isen(North western Polytechnical University,Xi ’an 710072,China )Abstract:Anti 2l ock braking syste m (ABS )is an i m portant device of braking system of modern vehicle which can avoid braking syste m being l ocked,i m p r ove the stabilizati on of directi on and engineering ability for diversi on in the braking p r ocedure,shorten the braking distance ulti m ately 1Based on the mathe matics model of vehicle braking p r ocedure,the vehicle braking p r ocedure was si m ulated with MAT LAB s oft w are and a si m ulati on curve of vehicle braking was obtained,and a visualized emersi on of the whole braking p r oce 2dure was realized by 3DSMAX ani m ati on technique as supp le mented the defect ofMAT LAB si m ulati on 1Keywords:Anti 2l ock braking system;MAT LAB;3DS MAX;Si m ulati on0 前言在研究汽车制动防抱死控制系统(ABS )时,需要对汽车的制动过程进行深入了解。
车辆防抱制动系统与主动悬架系统集成协调控制算法的仿真

0 引
口
程 中抱死 , 免车辆 出现抱 死拖 滑 、 动跑偏 等现 避 制
象 , 制 动 力 保 持 在 最 大 范 围 , 到最 佳 制 动 效 使 达
随着计算机技术的发展 , 自动控制理论在车 辆 中的应用 大 大提 高 了车 辆 的平顺 性 、 纵 稳 定 操 性、 行车安全性 以及乘坐舒适性。主要表现在主 动悬 架系统 ( S 、 AS ) 防抱 制 动 系 统 ( S 以及 电 AB )
模型 , 个 系统在 1 2 个上层控制器 的协调作用下进行集成控 制。仿真结果表 明, 系统经过集成控 制后 , 车辆 的 乘坐舒适性 和行 车安全性相对于单独控 制悬架 系统或制动 系统均得 到 了不 同程 度 的提高 , 明了这一控制 证
方法的有效性。 关键词 : 主动悬架系统 ;防抱制动系统 ; 最优控制 ; 模糊控制 ;集成控 制
动助力 转 向系 统 ( P ) 控 制 技 术 在 车辆 中 的 E S等
应用。
果, 满足人们对行车安全性能的要求, 减少交通事
故 的发生 E 。 l i
近几年来 , 许多科研机构和高等院校对主动
悬架 和 防抱 制 动系 统 的 建模 、 构 设 计 以及 控 制 结
t e a t-o k b a i y tm nd a tv u p nso y t m fv h c e h n ilc r k ng s se a c i e s s e i n s s e o e i l s
W ANG — o g, S Qi n ONG —in d Yi a g l
( h o fM a hn r n tmo ieEn ie rn Sc o lo c ie ya d Auo b l gn eig,Hee iest fTehn lgy fiUnv r iyo c oo ,H ee 3 0 9,Chna fi2 0 0 i )
基于carsim的车辆abs控制系统仿真研究

第1章绪论1.1 论文研究的目的和意义1.1.1研究的目的本论文的研究目的在于加强在汽车专业中对ABS的学习和认识,而本课题开发出的ABS仿真控制系统,就是学习ABS的结构、原理的良好平台。
为了学习开发质优价廉、具有自主知识产权的ABS系统,提高我国汽车的整体技术含量,提高我们汽车行业从业人员的整体水平,提高中国汽车同国外汽车的竞争力,扩大市场份额,成为一个新的经济增长点,所以,我采用CarSim软件对ABS控制系统进行仿真研究,为ABS的生产设计打下良好基础。
1.1.2 研究的意义当今,汽车工业迅猛发展,对汽车性能的要求也越来越高,从最早对汽车动力性和越野性的要求逐渐向经济性、舒适性和安全性方向发展。
汽车安全性的研究分为两个方向:主动安全和被动安全。
主动安全是在汽车设计上尽量避免交通事故的发生,被动安全是假设交通事故已经发生,汽车在设计时应采取何措施尽量保护乘员不受伤害。
ABS属于主动安全的范畴[1],它是在制动过程中通过调节制动轮缸的压力使作用于车轮的制动力矩受到控制,将车轮的滑移率控制在较理想的范围内,充分利用了轮胎与地面的峰值附着系数和高的侧向力系数,提高制动减速度,缩短制动距离,消除汽车打滑的危险,从而保证了汽车的方向稳定性。
我们知道,在紧急情况下,驾驶员首先的本能是猛踩制动踏板,以使汽车停车。
此时如果没有装备ABS,车轮将很快抱死,即车轮不再转动,而是在路面上拖滑。
后轮抱死将使汽车失去方向稳定性,而前轮抱死则将使汽车失去转向控制.随着汽车行驶速度的显著提高和道路行密度的增大,交通事故的发生率逐年呈上升趋势,有数据统计,每年有10%左右的交通事故是由于紧急制动时汽车失稳造成的[2],所以全方位、可靠地提高汽车的主动安全性能就成为摆在汽车设计、开发及科研人员面前一项紧迫而艰巨的任务.而基于汽车轮胎与路面之间的附着性能随滑移率改变的基本原理开发的旨在改善车辆操纵性和横向稳定性的一些高技术系统,包括防抱制动系统(Anti-lock braking system,缩写为ABS )、防滑控制系统(Anti-Slip Regulation,缩写为ASR)和车辆动力学稳定性控制(Vehicle Dynamics Stability Control System,缩写为VDSC),更是受到汽车制造商的青睐和厚爱。
汽车操纵稳定性的研究与评价

汽车操纵稳定性的研究与评价随着汽车工业的不断发展,汽车性能得到了显著提升。
汽车操纵稳定性作为衡量汽车性能的重要指标之一,直接影响着驾驶者的操控感受和行车安全。
因此,对汽车操纵稳定性进行深入研究,提高其评价水平,对于提升汽车产品竞争力具有重要意义。
汽车操纵稳定性研究主要涉及车辆动力学、控制理论、机械系统等多个领域,其目的是在各种行驶条件下,保证汽车具有良好的操控性能和稳定性。
然而,目前汽车操纵稳定性研究仍存在一定的问题,如评价标准不统测试条件不完善等,制约了其发展。
汽车操纵稳定性对于保证驾驶安全具有重要意义。
在行驶过程中,车辆受到外部干扰或自身惯性力的影响,容易导致车身失稳,从而引发交通事故。
良好的汽车操纵稳定性通过有效抑制车身晃动、调整轮胎磨损,为驾驶者提供稳定的操控感,降低交通事故风险。
影响汽车操纵稳定性的因素主要包括以下几个方面:(1)车辆动力学性能:车辆的加速、减速、转弯等动力学性能直接影响驾驶者的操控感受和行车安全。
(2)轮胎性能:轮胎的抓地力、摩擦系数等性能对车辆的操控性和稳定性具有重要影响。
(3)悬挂系统:悬挂系统的设计直接影响车辆的侧倾、振动等特性,从而影响操纵稳定性。
(4)驾驶者的操控技巧:驾驶者的预判、反应速度、操控技巧等直接影响车辆的操纵稳定性。
为提高汽车操纵稳定性,需要采取相应的控制策略。
其中,最重要的是采取主动控制策略,包括:(1)防抱死制动系统(ABS):通过调节制动压力,防止轮胎抱死,提高制动过程中的稳定性。
(2)电子稳定系统(ESP):通过传感器实时监测车辆状态,对过度转向或不足转向进行纠正,保证车辆稳定行驶。
(3)四轮驱动(4WD):通过将驱动力分配到四个轮胎上,提高车辆的加速性能和操控稳定性。
汽车操纵稳定性的评价主要从以下几个方面进行:(1)侧向稳定性:评价车辆在侧向受力情况下的稳定性。
(2)纵向稳定性:评价车辆在纵向受力情况下的稳定性。
(3)横向稳定性:评价车辆在横向受力情况下的稳定性。
ABS汽车防抱死制动系统设计资料
ABS汽车防抱死制动系统设计1 防抱死制动系统概述1.1 ABS的功能汽车ABS在高速制动时用来防止车轮抱死,ABS是英文Anti-lock Brake Syetem的缩写,全文的意思是防抱死制动系统,简称ABS。
凡驾驶过汽车的人都有这样的经历:在积水的柏油路上或在冰雪路面紧急制动时,汽车轻者会发生侧滑,严重时会掉头、甩尾,甚至产生剧烈旋转。
制动力过大,将使车轮抱死,汽车方向失去控制后,若是弯道就有可能从路边滑出或闯入对面车道,即使不是弯道也无法躲避障碍物,产生这些危险状况的原因在于汽车的车轮在制动过程中产生抱死现象,此时,车轮相对于路面的运动不再是滚动,而是滑动,路面作用在轮胎上的侧滑摩擦力和纵向制动力变得很小,路面越滑,车轮越容易。
总之,汽车制动时车轮如果抱死将产生以下不良影响:方向失去控制,出现侧滑、甩尾,甚至翻车;制动效率下降,延长了制动距离;轮胎过度磨损,产生“小平面”,甚至爆胎。
ABS防抱死制动装置就是为了防止上述缺陷的发生而研制的装置,它有以下几点好处:增加制动稳定性,防止方向失控、侧滑和甩尾;提高制动效率,缩短制动距离(松软的沙石路面除外);减少轮胎磨损,防止爆胎。
现代轿车的ABS由输入传感器、控制电脑、输出调制器及连接线等组成。
输入传感器通常包括死个车轮的轮速信号、刹车信号,个别车型还有减速度信号、手刹车或车油面信号。
ABS的第一个优点是增加了汽车制动时候的稳定性。
汽车制动时,四个轮子上的制动力是不一样的,如果汽车的前轮抱死,驾驶员就无法控制汽车的行驶方向,这是非常危险的;倘若汽车的后轮先抱死,则会出现侧滑、甩尾,甚至使汽车整个掉头等严重事故。
ABS可以防止四个轮子制动时被完全抱死,提高了汽车行驶的稳定性。
汽车生产厂家的研究数据表明,装有ABS的车辆,可使因车论侧滑引起的事故比例下降8%左右。
ABS的第二个优点是能缩短制动距离。
这是因为在同样紧急制动的情况下,ABS可以将滑移率(汽车华东距离与行驶的比)控制在20%左右,即可获得最大的纵向制动力的结果。
防抱制动中AUDI盘式制动器动态特性的系统辨识
最优辅助 变量 法对所 建模 型 的参 数进行 了辨识. 通过 残 差 白色 性检 验 以及 不 同观 测数 据 的 比 较. 验证 了所建模 型 的精确 程度。 关键词 : 防拖制 动系 统; 式制动 罄; 盎 动态特 性 ; 统辨识 系 中图分 类号 : 6 1 2 U435 ’ 文献标识 码 : A
制 方式 , 在采用 自动控制 方式 工作 时. 微型计算 机 作终 端控制 器 , 用 可根 据实际需 要编制 各种试验 程 序, 执 行现 有 的任何试 验 标准[ 。 图 2为试验 台的硬 件方 框图 。试 验 台的 液压伺 服 阀 在 功能 上 类 似 于 AB S压力 调 节 器. 通过 编 制试 验 程序 可 以控制 伺 服 阀的 输 出压力 , 而达 到 模拟 防抱 制 动 的 目的 。伺 从 宴越电 卜 — 捌动嚣 机 —— — 伺■膏/ 麓压蛾
0 概
述
) 可以改善 制动 过程 中的可操 纵性 和转 向性 , 提高 制动 技能 . 保证制 动 过程
汽车 防抱制动 系统 (
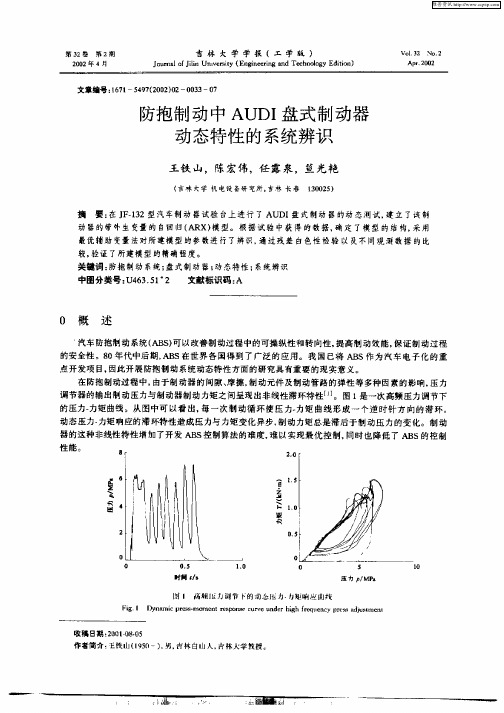
的安 全性 。8 代 中后期 . B 0年 A S在世界 各国得 到 了 广泛 的 应 用。 我 国 已将 AB S作 为汽 车 电子 化 的重 点 开发项 目, 因此 开展 防抱制 动 系统 动态特性 方面 的研究具 有重要 的现实意 义 。 在防 抱制动过 程中 . 由于制 动器 的 间隙 、 擦 . 动元件 及制动 管 路的弹 性 等多种 因素 的影响 , 摩 制 压力 调节 器的输 出制动 压力与 制动 器制 动力矩 之 间呈现 出非线性 滞环 特性 _ 。 图 1 一次 高频 压力调 节下 J ] 是 的 压力一 力矩 曲线 。从 图中可 以看 出. 一 次制 动 循 环 使 压 力功 矩 曲线 形 成 一 个逆 时针 方 向的 滞 环 。 每 动 态压力・ 力矩 响应的滞 环特性 造 成压 力与力矩 变化 异步 , 动 力矩总是 滞 后于 制动 压 力 的变化 。制 动 制 器 的这 种非线性 特性 增加 了开 发 AB S控 制算 法的难 度, 以实现最 优 控 制, 难 同时 也 降低 了 A S的控 制 B
汽车防抱制动系统自适应滑模控制算法的研究和半实物仿真

汽 车 防抱 制动 系统 自适应 滑 模控 制算 法 的研 究 和半 实物仿 真
刘 波 , 张 王 罗飞路 , 国福 己, 刘
( 国防科 技大学 机电工程 与 自动化学院 , 湖南 长 沙 40 7 ) 10 3
摘
要 : 对车辆防抱制动系统(B ) 针 A s非线 性控制 模型 , 在分 析零 阶切换方式 滑模 变结 构控制算 法的基
L oZ A G Q, I e l,I u- I 1 ,H N iI OFiu LU G of U3 A - u
( oee0 caoi nier gadA tm t n aoa nv 0 e neTcnl y Cl g f ht c E g en n u ao ,N tnl i. f f s ehoo ,Ql1 8407 , hn) l Me r s n n i o i i U De g a h 10 3 C ia I
减小制动力矩 的颤 幅和平缓 轮速 波动方面均有一定优势 。 关键词 : 线性系统 ; B ; 非 A S滑模变结构控制 ; 自适 应控制 中图分类 号 :P7 3 T 23 文献标 识码 : A
Re e r h a d H afPr c ia i u a in o a tv l i g Co to s a c n l a tc lS m lto n Ad p i e S i n n r l d Alo ih s o t m o ie An i c — r k n y tm g rt m fAu o b l tl k b a i g S se o
m d otl otmfrh o-na no m eo A t c-r ig yt A S . h oe n o ̄ nh te nler t l e l n l kBa n s m( S ) T e c r o n i c r d o f i o k S e
基于CARSIM的车辆ABS控制系统仿真研究

第1章绪论1.1 论文研究的目的和意义1.1.1研究的目的本论文的研究目的在于加强在汽车专业中对ABS的学习和认识,而本课题开发出的ABS仿真控制系统,就是学习ABS的结构、原理的良好平台。
为了学习开发质优价廉、具有自主知识产权的ABS系统,提高我国汽车的整体技术含量,提高我们汽车行业从业人员的整体水平,提高中国汽车同国外汽车的竞争力,扩大市场份额,成为一个新的经济增长点,所以,我采用CarSim软件对ABS控制系统进行仿真研究,为ABS 的生产设计打下良好基础。
1.1.2 研究的意义当今,汽车工业迅猛发展,对汽车性能的要求也越来越高,从最早对汽车动力性和越野性的要求逐渐向经济性、舒适性和安全性方向发展。
汽车安全性的研究分为两个方向:主动安全和被动安全。
主动安全是在汽车设计上尽量避免交通事故的发生,被动安全是假设交通事故已经发生,汽车在设计时应采取何措施尽量保护乘员不受伤害。
ABS属于主动安全的范畴[1],它是在制动过程中通过调节制动轮缸的压力使作用于车轮的制动力矩受到控制,将车轮的滑移率控制在较理想的范围内,充分利用了轮胎与地面的峰值附着系数和高的侧向力系数,提高制动减速度,缩短制动距离,消除汽车打滑的危险,从而保证了汽车的方向稳定性。
我们知道,在紧急情况下,驾驶员首先的本能是猛踩制动踏板,以使汽车停车。
此时如果没有装备ABS,车轮将很快抱死,即车轮不再转动,而是在路面上拖滑。
后轮抱死将使汽车失去方向稳定性,而前轮抱死则将使汽车失去转向控制.随着汽车行驶速度的显著提高和道路行密度的增大,交通事故的发生率逐年呈上升趋势,有数据统计,每年有10%左右的交通事故是由于紧急制动时汽车失稳造成的[2],所以全方位、可靠地提高汽车的主动安全性能就成为摆在汽车设计、开发及科研人员面前一项紧迫而艰巨的任务.而基于汽车轮胎与路面之间的附着性能随滑移率改变的基本原理开发的旨在改善车辆操纵性和横向稳定性的一些高技术系统,包括防抱制动系统(Anti-lock braking system,缩写为ABS )、防滑控制系统(Anti-Slip Regulation,缩写为ASR)和车辆动力学稳定性控制(Vehicle Dynamics Stability Control System,缩写为VDSC),更是受到汽车制造商的青睐和厚爱。
轨道交通计算机联锁系统中的车辆自动控制与防碰撞技术

轨道交通计算机联锁系统中的车辆自动控制与防碰撞技术随着城市交通需求的增大和技术的不断进步,轨道交通成为现代城市中不可或缺的一部分。
为了确保轨道交通的安全和高效运行,轨道交通计算机联锁系统中的车辆自动控制与防碰撞技术变得尤为重要。
本文将介绍该技术的原理、特点和应用。
一、技术原理车辆自动控制与防碰撞技术基于计算机联锁系统,通过车载设备和基于线路的设备实现车辆间的自动控制和防碰撞。
具体原理如下:1. 车载设备:每辆列车都配备有车载设备,包括定位传感器、通信设备和控制系统。
定位传感器用于实时获取列车的位置和速度信息,通信设备用于与控制中心和其他车辆进行数据交换,控制系统则根据接收到的数据进行车辆控制。
2. 基于线路的设备:轨道交通线路上部署有许多设备,包括信号机、轨道电路、道岔等。
信号机用于指示列车是否可以行驶,轨道电路用于检测列车的位置和速度,道岔用于实现轨道的切换。
这些设备与车载设备通过通信网络相连接,实时交换数据。
3. 控制中心:轨道交通计算机联锁系统的核心是控制中心,负责监控和控制所有车辆的运行。
控制中心接收来自车载设备和基于线路的设备的数据,根据预设的运行条件和时刻表,通过计算和决策,生成控制指令发送给每辆列车,实现车辆的自动控制和防碰撞。
二、技术特点车辆自动控制与防碰撞技术具有以下特点:1. 安全性:该技术通过实时监测车辆的位置、速度和运行状态,能够快速发现和处理潜在的危险情况,如列车之间的碰撞风险、距离过近等,从而大大提高了轨道交通的安全性。
2. 高效性:车辆自动控制和防碰撞技术能够实现列车的精确控制和调度,减少列车在轨道上的停留时间,提高列车的运行效率。
此外,通过智能算法和优化调度,还可以减少列车之间的间隔,增加线路的运行能力。
3. 自适应性:该技术能够根据不同情况自动调整列车的运行速度和间隔,使列车能够根据实际需要灵活变化。
例如,在高峰期可以加大列车之间的间隔,以增加运行能力;而在低峰期则可以减小列车之间的间隔,以提高列车的运行效率。
基于MatlabSimulink的电动汽车仿真模型设计与应用
基于MatlabSimulink的电动汽车仿真模型设计与应用一、本文概述随着全球能源危机和环境污染问题的日益严重,电动汽车作为一种清洁、高效的交通工具,受到了越来越多的关注和推广。
在电动汽车的研发过程中,仿真模型的建立与应用发挥着至关重要的作用。
本文旨在探讨基于Matlab/Simulink的电动汽车仿真模型设计与应用,旨在为电动汽车的设计、优化和控制提供理论支持和实践指导。
本文将对电动汽车仿真模型的重要性进行阐述,指出其在电动汽车研发过程中的地位和作用。
接着,将详细介绍Matlab/Simulink在电动汽车仿真模型设计中的应用,包括其强大的建模功能、灵活的仿真能力以及高效的算法处理能力等。
在此基础上,本文将重点讨论电动汽车仿真模型的设计方法。
包括电动汽车动力系统的建模、控制系统的建模以及整车模型的集成等。
将结合具体案例,对电动汽车仿真模型在实际应用中的效果进行展示和分析,以验证其有效性和可靠性。
本文还将对电动汽车仿真模型的发展趋势进行展望,探讨其在未来电动汽车研发中的潜在应用前景。
通过本文的研究,希望能够为电动汽车仿真模型的设计与应用提供有益的参考和启示,推动电动汽车技术的不断发展和进步。
二、电动汽车仿真模型设计基础电动汽车(EV)仿真模型的设计是一个涉及多个学科领域的复杂过程,其中包括电力电子、控制理论、车辆动力学以及计算机建模等。
在Matlab/Simulink环境中,电动汽车仿真模型的设计基础主要包括对车辆各子系统的理解和建模,以及如何利用Simulink提供的各种模块和工具箱进行模型的构建和仿真。
电动汽车的主要子系统包括电池管理系统(BMS)、电机控制系统(MCS)、车辆控制系统(VCS)以及车辆动力学模型。
这些子系统都需要根据实际的电动汽车设计和性能参数进行精确的建模。
电池管理系统(BMS)建模:电池是电动汽车的能源来源,因此,BMS建模对于电动汽车的整体性能至关重要。
BMS模型需要包括电池的荷电状态(SOC)估计、电池健康状况(SOH)监测、电池热管理以及电池能量管理等功能。
ABS(制动防抱死系统)介绍

EBD可依据车辆的重量和路面条件来控制制动过程, 自动以前轮为基准去比较
后轮轮胎的滑动率, 如发觉前后车轮有差异,而且差异程度必须被调整时,它 就会调整汽车制动液压系统,使前、后轮的液压接近理想化制动力的分布。 因此,猛踩制动在ABS动作启动之前,EBD巳经平衡了每一个轮的有效地面 抓地力, 防止出现后轮先抱死的情况,改善制动力的平衡并缩短汽车制动距离。
转动惯量较小时,随着制动力矩的上升,在滑移率到达λopt之前车轮减 速度可以比较快地达到一定值。当转动惯量较大时,车轮减速度到达定 值的时间比较慢,一旦达到λopt时,车轮突然进入不稳定区域,制动力 矩如再增大,车轮马上抱死。
3. ABS目前的控制技术
目前的技术,还根本解决不了预测行驶路面的µB- λ的问题,由档位所确定的转动
EDL与ASR协同作用
在高速时,如果一个或几个车轮打滑会很危险,因此需要ASR。
工作条件:在小于40km/h时,如果只是前轮有转速差,只起用EDL 系统,如果此时即有前轮转速差,又有前后轮转速差,则二者同时 起作用。在大于40km/h时,不论前轮有转速差还是后轮有转速差, 则只启用ASR系统,这个时候的依据是,以转得第二快的轮子做为 参考,如果与最快的轮子转速差差5km/h,则启动ASR系统。
在所有的速度情况下,如果只是前后轮间有转速差,则只启动ASR 系统。
(四)ESP-电子稳定程序
ESP是英文缩写 Electronic Stability Program
ESP称得上是当前汽车防滑装置的最高级形式。它是一个真正的革命性 的稳定的控制系统。它能在危险时刻或车辆失控的瞬间,协助驾驶员操 控,使车辆保持行驶稳定。ESP系统由控制单元及转向传感器(监测方 向盘的转向角度)、车轮传感器(监测各个车轮的速度转动)、侧滑传 感器(监测车体绕垂直轴线转动的状态)、横向加速度传感器(监测汽 车转弯时的离心力)等组成。它能够一方面根据方向盘的转角和车轮的 速度,时刻监控驾驶员的驾驶意图,另一方面通过测量加速度和侧摆偏 转率确定当前汽车的行驶状态。时时刻刻对这两方面进行比较分析,如 发现异常,立即作出反应,从而迅速而有效的控制车辆。
汽车防抱制动系统;ABS仿真模型建模中期答辩
第二部分
几个模块的关系连接方式如下所示
最佳滑移率
控制器模块
制动模块
制动力矩M
车轮模块
V ω
显示
轮胎模块
附着系数u
滑移率S
滑移率模块
【1】宋进源.汽车防抱制动系统建模与 控制仿真研究.广西大学 【2】程军.汽车防抱死制动系统的理论 与实践【M】.北京:北京理工大学出 版社,1999. 【3】姚占辉.汽车防抱死制动系统控制 方法分析与仿真研究.长安大学
第二部分
设计思路: 1.了解ABS运动机理 2.建立其数学模型 3.选取控制方法 4.建立仿真模型 5.仿真并分析
第三部分
我遇到的问题主要有对ABS进行数学 模型的建模和仿真模型的建模,并采用 所需的控制方法,遇到这些问题我先自 己查阅资料,能自己解决的我就自己解 决了,有些问题查阅不到我就找我们导 师我们一起来解决。
第五部分
第五章仿真结果及分析 对每一种控制方法都进行控制仿真,记 录相关数据和图形,分析控制效果。记 录相关的数据和图形,进一步分其控制 效果和鲁棒性,得出结论。 第六章总结 对本文的研究工作进行概括和总结。并 对延续性课题提出自己的观点和意见。
谢谢!!!
第四部分
第11-13周 完成PID算法的具体系数确定, 编写SMUINK程序,撰写本章节内容; 第14-15周 总结前期各项资料,对材料 进行整理,完成毕业论文的前言、目录 及后续总结的撰写及修改; 第16-17周 进一步检查论文,实现论文 的定稿,参加答辩。
第五部分
拟定论文框架 第一章绪论 简述汽车防抱制动系统的概念、背景、 研究的意义和研究概况。并介绍课题研 究的主要内容及论文章节安排。 第二章 汽车防抱制动系统的组成结构与 基本原理 分析汽车制动时的受力情况,阐明路面 附着系数与车轮滑移率之间的关系。并 简述ABS的基本组成及类型,阐述ABS控 制原理及工作过程。
基于模糊PID的飞机防滑刹车系统动态仿真

T e o t z d r lswe e a o t d t e i n f zy c nr l r h p i e u e r d p e o d sg u z o t l .Th n t e f z y P D c n r l n d lo h r p s d mi oe e h u z I o tol g mo e ft e p o o e i s se wa e f dwi i l k h e u t fte smu ain d mo srt h t h u z I c n r l a c iv n y t m sv ri t Smu i .T er s l o i lt e n taet a ef z yP D o to n a h e ea i e h n s h o t c
adl blyo t— a m n.A mn th s pol , e pi l t tg fuz ot l ae ngnt n wait f ni jm ig i iga tee rbe anwot r e o zycnr sdo ee c o i a ms ma s a y f ob i
第2卷 第 期 9 2
文 章 编 号 :0 6— 3 8 2 1 ) 2— 0 0—0 10 9 4 (0 2 0 0 4 5
计
算
机
仿
真
22 月 0 年2 1
基 于模 糊 PD 的飞 机 防滑 刹 车 系统 动 态仿 真 I
王平军, 侯 波
( 空军工程大学工程学院 , 陕西 西安 7 0 3 ) 10 8 摘要 : 在飞机 防滑优化控制问题的研究中 , 存在飞机防滑刹车系统 响应速度慢 、 抗干扰能 力差等 问题 。由于飞机 着陆时发动
frc n r l n n i kd b a i g s se o o t l g a t —s i r k n y tm. oi KE YW ORDS: r r ta t —s i r k n ;Si p n ai Ai a n i kd b a i g l i g r t cf p o;F z y P D c nr l r y tm fs lt n u z I o t l ;S se o i ai oe mu o
气压防抱死制动系统调节器动态特性试验研究

系统可靠性 的一项 重要技术 指标 , 是指 导开发 调节 也 器动态性能检测系统 的重要参考依据 。
第 一作 者蒋 强 , ,95年 生 , 为 东北 大学机 械 电子 工程 专 业在 读 男 17 现
博 士研 究 生, 师 ; 从事 汽车 动 力传动 系统 方面 的研 究。 讲 主要 2 4
口设置测试点 , 检测静 态增压 与静态 减压 条件 下压力
的大小 ; 调节器 的绝缘 电阻 、 控制线 圈电阻和最大 电流
:
( l 1 ) () 2
等参数 的测试则采用专用测试仪器——绝缘 电阻测试
仪及精密万用表 。密 闭性 的检测方法有干式和湿式两 种检测方法 。由于湿 式检测 方法受 人 为因素影 响 , 所
究 。建 立 了气压 制动 A S 节器 制动气 室在 充放 气 状态 下 的 动态 微 分 方程 , 通过 仿 真 , 析 了其 气 室压 力 变化 的动 静态 特 性 ; B调 并 分 同 时 , 绍 了气压 A S 介 B 调节 器 的性 能评 价方 法 , 提出 了一种 动静 态性 能参数 试验 测试 方法 , 完成 了气压 A S B 调节 器 的性能试 验 。试验 结
耪 琵
( 重庆理 工 大学汽 车 学院 重庆 ,
罗 宠
林 桦
互 伟 勋
404 ) 00 3
405 ; 庆聚 能汽 车技 术 有限公 司 , 004 重 重庆
摘
要 :为 提高商 用 汽车气 压 防抱 死 制动 系统 ( B ) A S 的安 全性 和 可靠 性 , 对气 压 A S调节 器 的特 性 , B 特别 是动 态 特性 进 行 了试 验研
毕业论文----汽车防抱死制动系统的建模与仿真(含开题报告 中英文翻译)

分类号编号毕业论文题目汽车防抱制动系统的建模与仿真——模糊控制在ABS中的应用学院机械学院专业机械设计制造及其自动化毕业设计任务书设计题目:汽车防抱制动系统的建模与仿真专业:机械设计制造及其自动化班级学号:姓名:院、系:机械学院2010年2 月26 日一、毕业设计的目的毕业设计是本科教育中培养学生的重要的实践性教学环节,也是最后一个教学环节。
其目的:1.培养学生综合运用基础理论知识、专业知识和技能,解决工程实际问题的能力;2.培养学生运用机械设计手册、图册、国家标准规范和规程的能力;3.培养学生学会机械设计的思想、方法和步骤,掌握计算方法、掌握计算机绘图及编写工程设计文件等基本技能;4.提高学生分析问题、解决问题和独立工作的能力。
二、主要设计内容1.专业外文资料翻译;2.毕业实习,实习报告;3.开题报告;4.汽车防抱制动系统的建模与仿真。
三、重点研究问题1.汽车防抱制动系统的车辆仿真模型的建立;2.采用的控制方法模型的建立;四、主要技术指标和主要设计参数1.收集资料确定一个自己的设计参数,在查阅资料后确定下来。
2.控制方法根据所查找文献自己确定。
五、设计成果要求1.开题报告1份(要求3 000字左右、查阅文献10篇以上、文献综述引用5篇以上,样表从教务处表格下载中下载);2.实习报告1份;3.专业外文资料翻译1篇(不少于2 000汉字);4.毕业设计(论文)1份(设计说明书应在10000字以上,论文应在6000字以上,包括封面、任务书、开题报告、中英文摘要、目录、正文、参考文献、附录);5.设计图纸一套(不少于A0图2张);6.所有内容电子文档一套;7.毕业论文成果材料清单一份。
本科生毕业设计开题报告2010 年 03 月 30日学生姓名学号专业机械设计制造及其自动化题目名称汽车防抱死制动系统的建模与仿真课题来源自选主要内容一.本课题设计的目的与意义本课题为《汽车防抱制动系统的建模与仿真》,要求我们收集资料自己确定一个设计参数,并查阅相关文献选择一种ABS的控制方法。
动车组的制动防抱死系统维护与操作
动车组的制动防抱死系统维护与操作动车组是一种高速列车的分类,以其快速、稳定和舒适的旅行体验而受到广大乘客的喜爱。
作为现代高速铁路交通的骄傲,动车组不仅具备高速运行的能力,还配备了许多先进的安全措施,其中之一就是制动防抱死系统(Anti-lock Braking System,简称ABS)。
本文将介绍动车组的制动防抱死系统的维护与操作。
1. 制动防抱死系统的原理与功能制动防抱死系统是一种基于电子控制的安全系统,旨在防止车轮在急刹车时抱死。
其工作原理基于车轮在制动力作用下产生的滑移率。
系统通过感应车轮转速,当发现某个车轮即将抱死时,系统会通过电子控制单元(ECU)来调节制动力,使车轮保持在一个安全范围内。
这可以有效防止车轮滑行、保持车辆的稳定性,同时保护乘客的安全。
2. 制动防抱死系统的维护制动防抱死系统是动车组安全的重要组成部分,因此需要进行定期的维护保养,以确保其正常工作。
以下是维护制动防抱死系统的主要步骤:2.1 定期检查制动系统定期检查制动系统的工作状态对于维护制动防抱死系统至关重要。
检查包括制动片、制动盘和制动液的磨损情况,确保它们没有超过规定的标准。
同时还需要检查制动系统的传感器和导线连接,确保其良好工作。
2.2 清洁制动系统制动防抱死系统需要保持清洁,以确保各个传感器和控制单元的准确读取。
在检查和维护过程中,清洁制动系统的各个部件是非常重要的,可以使用适当的清洁剂和工具进行清洁。
2.3 保持制动系统的调整制动系统的调整是维护制动防抱死系统不可或缺的一部分。
调整包括制动片与制动盘的间隙,保持在合适的范围内。
如果间隙太小,会导致制动片持续接触制动盘,增加磨损,如果间隙太大,则制动能力会下降。
3. 制动防抱死系统的操作在使用动车组的制动防抱死系统时,乘务人员需要了解正确的操作方法,并随时保持警觉。
以下是一些相关的操作注意事项:3.1 观察行车状态乘务人员应该随时观察动车组的行车状态。
如果在制动过程中发现车轮发生异响、抖动或任何异常情况,需要立即报告相关人员,并采取相应的安全措施。
基于Simulink的汽车ABS建模与仿真研究

基于Simulink的汽车ABS建模与仿真研究【摘要】本文采用Simulink建模,对ABS模型中的连续系统和离散系统进行仿真,以此来初步确定ABS的参数,并通过仿真结果验证和分析控制逻辑。
仿真模型有效模拟了汽车ABS作用过程,真实地反映汽车ABS系统的实际工作情况,表明ABS在缩短汽车距离上的显著功能。
【关键词】ABS;仿真模型;Simulink随着汽车保有量的不断增长,道路交通事故己成为世界性的社会问题。
众所周知,很多交通事故都是由于车辆制动性能不良所引起的,所以对车辆制动工况的制动性能和稳定性能进行分析和研究很有必要。
制动过程是很复杂的汽车动力学问题,所以在实际路测中会受到很多因素的影响,即使在完全相同条件下测得的结果也可能有较大差异,所以可利用利用计算机进行仿真研究,能够获得更加接近实际的结果,可以对汽车制动工况的各项性能做出宏观上的正确评价。
在现代电子技术的迅速发展的今天,作为汽车主动安全技术的重要体现,车辆制动防抱死系统(ABS),已经普遍安装在各种轿车和载重车上。
它从防止制动过程中车轮抱死的角度出发,避免车辆后轮侧滑和前轮丧失转向能力,提高车辆对地面附着能力的利用率,从而达到改善车辆制动稳定性、操纵性和缩短制动距离等目的。
采用Simulink建模,对ABS模型中的连续系统和离散系统进行仿真。
仿真结果表明,该仿真系统可以比较真实反映出汽车ABS系统的工作过程,显著地缩小了制动距离,提高了安全性。
通过对ABS建立理论模型,并且进行计算机仿真,可初步来确定ABS的参数,还可以通过仿真结果验证和分析控制逻辑。
所以对ABS的仿真分析既减少开发成本,也有效地缩短了开发周期,同时实际ABS性能分析及控制逻辑的模型也可通过少量的试验来验证。
1.汽车防抱死制动系统的组成和工作原理汽车防抱死制动系统由3部分组成:传感器、电控单元( ECU) 和执行器(压力调节器),三部分通过线路连接成一个有机体,形成一个自动控制系统。