机器人足球第二部分
机器人足球操作方法

机器人足球操作方法
机器人足球操作方法取决于具体的机器人设计和规则设置。
一般来说,机器人足球操作方法包括以下几个方面:
1. 视觉感知:机器人通过摄像头等感知设备来获取场地、球和其他机器人的信息。
这些信息可以用来制定行动计划和做出决策。
2. 运动控制:机器人需要通过马达或其他机械部件来实现移动和控制。
操作方法包括前进、后退、转向等基本动作。
3. 碰撞避免:机器人在进行移动时需要监测周围环境,避免与其他机器人或障碍物碰撞。
碰撞避免算法可以通过感知和决策来实现。
4. 球的控制:机器人需要能够识别球的位置和状态,并做出相应的动作来控制球的移动。
操作方法包括踢球、传球和接球等动作。
5. 团队合作:机器人足球通常是以团队的形式进行比赛,所以机器人需要能够与其他机器人进行合作,制定协同策略,并进行通信和协调。
以上只是机器人足球操作的一些基本方法,具体的实现方式和操作规则可能因不同的机器人类型和比赛规则而有所不同。
真实的机器人足球操作方法通常是通过
编程和算法来实现的。
FIRA机器人足球仿真策略技术报告

•引言•FIRA机器人足球仿真系统概述•机器人足球策略技术研究•仿真实验及结果分析•FIRA机器人足球仿真策略优化建议目•结论与展望•参考文献录Fira是一个机器人足球比赛的仿真平台,用于模拟和测试各种足球策略技术。
随着人工智能和机器人技术的快速发展,Fira成为了研究和学习机器人足球策略的重要工具。
背景介绍VS研究目的与意义目的意义研究内容与方法研究内容本报告将介绍Fira机器人足球仿真平台的基本原理和各种策略技术,包括进攻、防守、传球、射门等。
方法本研究将采用理论分析和实验验证相结合的方法,对Fira机器人足球仿真平台中的各种策略技术进行深入研究和测试。
FIRA机器人足球仿真系统简介FIRA机器人足球仿真系统架构2. 机器人模拟1. 比赛场景模拟4. 数据收集与分析3. 比赛规则模拟该部分主要负责模拟机器人足球比赛的规则,包括比赛时间、犯规判FIRA机器人足球仿真关键技术1. 3D图形渲染使用3D图形技术渲染比赛场景和机器人模型,以提供更加真实的视觉体验。
2. 物理引擎使用物理引擎模拟机器人的运动和碰撞,以提供更加真实的比赛效果。
3. 人工智能算法使用人工智能算法模拟机器人的决策和行为,以提供更加智能的机器人行为。
4. 机器学习技术使用机器学习技术自动化调整策略和算法,以提供更加高效的比赛表现。
进攻策略研究030201防守策略研究人盯人防守区域盯人防守全场紧逼通过短传和跑动,将球带向对方球门。
短传控球通过长传将球转移到对方防线的弱点,寻找进攻机会。
长传转移利用盘带技巧,突破对方防线,制造进攻机会。
盘带突破控球策略研究实验设定与条件仿真环境Fira机器人足球仿真环境,包括球场、机器人模型、物理引擎等。
机器人模型基于开源机器人模型进行修改,具有高度逼真度和精细的运动学性能。
传感器与感知采用红外传感器和超声传感器,获取球场信息,实现目标识别和定位。
通信与决策基于Zigbee无线通信技术,实现机器人之间的信息交互和协同决策。
FIRA仿真型机器人足球(Simuro5v5)比赛规则中文版

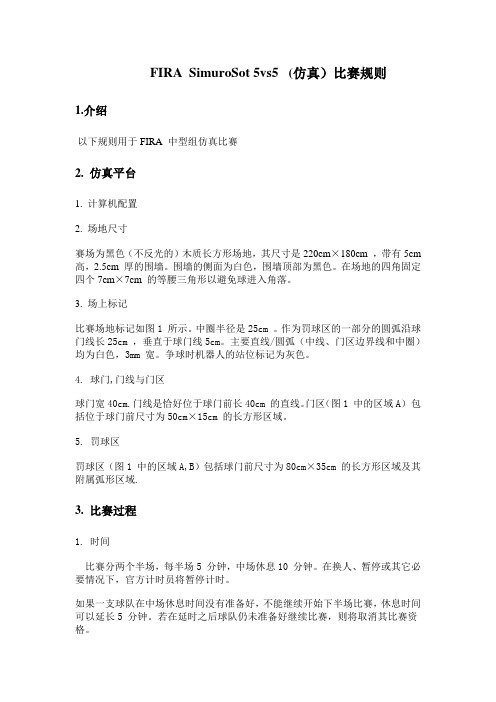
FIRA SimuroSot 5vs5 (仿真)比赛规则1.介绍以下规则用于FIRA 中型组仿真比赛2. 仿真平台1. 计算机配置2. 场地尺寸赛场为黑色(不反光的)木质长方形场地,其尺寸是220cm X 180cm ,带有5cm 高,2.5cm 厚的围墙。
围墙的侧面为白色,围墙顶部为黑色。
在场地的四角固定四个7cm x 7cm的等腰三角形以避免球进入角落。
3.场上标记比赛场地标记如图 1 所示。
中圈半径是25cm 。
作为罚球区的一部分的圆弧沿球门线长25cm,垂直于球门线5cm主要直线/圆弧(中线、门区边界线和中圈)均为白色,3mm宽。
争球时机器人的站位标记为灰色。
4.球门, 门线与门区球门宽40cm.门线是恰好位于球门前长40cm的直线。
门区(图1中的区域A)包括位于球门前尺寸为50cm x 15cm 的长方形区域。
5.罚球区罚球区(图1中的区域A,B)包括球门前尺寸为80cn X 35cm的长方形区域及其附属弧形区域.3. 比赛过程1. 时间比赛分两个半场,每半场 5 分钟,中场休息10 分钟。
在换人、暂停或其它必要情况下,官方计时员将暂停计时。
如果一支球队在中场休息时间没有准备好,不能继续开始下半场比赛,休息时间可以延长 5 分钟。
若在延时之后球队仍未准备好继续比赛,则将取消其比赛资格。
Figure 1: Dimensions and markings on the field2.暂停操作者可向裁判要求暂停。
在一场比赛中每队有权暂停2次,每次将持续2分钟。
3.记时仿真平台上的记时器不能代替官方记时器,比赛中应当使用专门的记时器•4•比赛中断只有在下列情况下比赛中断并由一个操作者重新布置机器人:1•破门得分或出现犯规2•裁判员判点球,争球,球门球,任意球3•仿真平台出现问题4 •有不可预知的情况发生,如计算机自动重启,突然停电5•运动员如果一个机器人位于己方的球门区内,应当被视为守门员。
(一个机器人有多于50 %在门区内就认为该机器人在门区内,这一点由裁判员来判断。
机器人足球比赛系统设计与实现
机器人足球比赛系统设计与实现机器人足球比赛是一项由各国高校生产的项目,旨在通过设计和制造参与比赛的小型机器人,提高学生们的机械设计和编程技能,同时也有利于促进国际交流。
本文将从机器人设计、调试、通信、算法等方面,介绍机器人足球比赛系统的构建过程。
一、机器人设计机器人设计是机器人足球比赛的“起点”。
设计师需要有全面的机械设计和电子技术知识,包括机身结构、传感器使用和控制算法等。
机身结构的设计用来保证机器人能够在预定的场地内正常使用。
机器人需要有肢体和轮子,以便在场地上移动,并携带所需的传感器、电池和通信设备。
传感器是机器人足球比赛中非常重要的组成部分,可以让机器人感知场地、球和对手的位置。
常用的传感器有红外线、超声波、相机等。
通过处理传感器收集的数据,机器人就可以做出响应和决策。
除此之外,机器人还需要一定的通信设备,方便和其它机器人进行通讯和协作。
常用的通信设备有蓝牙、Wi-Fi等无线设备,也有信号传输较为稳定的有线设备。
二、调试当机器人设计完成后,需要进行调试才能够运作。
调试是机器人足球比赛的要点,可以确保机器人在比赛时顺利运行。
首先,需要检查机器人的电路、电机是否连接正常,各个传感器计算数据是否准确。
这一步是重点和基础,如果出现问题,机器人将无法正常运行。
其次,需要测试机器人与其它机器人的通讯机制,同时在不同环境下测试机器人对于灯光、声音、障碍等方面的反应。
最后,需要利用场地模拟比赛,并对机器人的运动进行优化,确保机器人有足够的速度和敏锐的反应速度。
三、通信机器人足球比赛的灵魂之一就是通信。
在比赛中,机器人之间的通信可以让他们共同制定策略,并参加足球比赛。
一般来说,机器人与基站没有直接的连接,其通过无线网络和其它机器人进行通讯。
通信的方式有许多种,包括 ZigBee、无线局域网、蓝牙等。
不同的通信方式具有不同的优点和缺点。
比如,ZigBee通信路径较远,并且具有低耗能,但不适合实时应用;而无线局域网的优点是通讯速度快,但需要相对的大量电力。
机器人足球比赛规则模板.pptx

11
上届资格赛规定动作
2019-10-24
谢谢你的关注
初中组动作三 守门 机器人启动后可旋 转但不得进入罚球 区 来球后机器人可横 向运动扑球
成功扑球可得分
12
资格赛培训要点
建立信心,不依赖厂家提供的现成程序 学生应会审题 教会学生编程方法,而不是预想规定动作,
预编程序供比赛时调用
2019-10-24
谢谢你的关注
21
对几种情况的处置----没有进展
定义:球被多个机器人夹住而无法自由运 动或者在一段时间内所有机器人均未找到 球的情况(5.4.5.1)
处置:裁判员将球移到最近的发球区。如 果仍无进展,把球移到发球区中心 ( 5.4.5.2);裁判也可稍稍移动机器人, 让其恢复自由( 5.4.5.3)
R
G
B
ELeabharlann SL116 195 70 65 122 125
185 216 53 48 162 127
1 77 30 95 234 37
1
1
1 160 0
1
2019-10-24
谢谢你的关注
4
规则的特点
激烈的对抗式比赛 对动力仍有限制 通过场地的变化使比赛连贯 增加了资格赛
2019-10-24
2019-10-24
谢谢你的关注
7
资格赛中的情况
一支参赛队未带计算机 一支参赛队贴错了签号 秩序井然 理性对待资格赛的淘汰
2019-10-24
谢谢你的关注
8
上届资格赛成绩
初中组各队总积分在0~167分 高中组各队总积分在20~315.56分
2019-10-24
机器人足球实验报告

计算机与信息学院机器人足球实验报告计算机科学与技术实验一一、实验目的掌握RoboCup仿真机器人足球比赛相关知识点,具体内容如下:(1)Linux操作系统的熟悉及了解其基本操作。
(2)掌握Linux下如何进行C++编程,了解gcc编译器以及一些简单编辑工具,如:vi、emacs、gedit、Anjuta、Kdevelope等。
(3)启动RoboCup仿真(2D)足球队的比赛。
二、实验设备硬件环境:PC机软件环境:操作系统linux三、实验内容(1)掌握Linux 一些常用的命令a)如何找到用户主目录的绝对路径名?在自己的系统上,用户主目录的绝对路径名是什么?pwd /home/student(2)将当前工作目录从/home/UV A 转到/home/Tsinghua 需要使用什么命令?如何显示当前目录?cd /home/Tsinghua(3)如何在当前目录下建立子目录RoboCup?mkdir Robcup(4)如何删除子目录RoboCup?rmdir Robcup(5)如何查看当前目录下的内容?ls(6)如何将文件start.sh 的权限设定为:start.sh 属于可读、可写、可执行? chmod 777 start.sh(7)如何将当前目录包括所有子目录全部做备份文件,备份文件名为first.tar?tar xvf dir1 first.tar(8)如何将目录/home 下每一个文件压缩成.gz 文件?tar -zcwf store.tar(9)如何把上例中每个压缩的文件解压,并列出详细的信息?tar xvf store.tarLs -lg实验二1、实验目的(1)了解Demeer5的工作原理(2)学会对Demeer5进行简单的修改二、实验设备硬件环境:PC软件环境:Linux三、实验内容(1)如果可踢球就用最大力踢球else if( WM->isBallKickable()) // 如果球已知,而且当前球在我脚下(可踢){VecPosition pos=( PITCH_LENGTH/2.0,(-1 + 2*(WM->getCurrentCycle()%2)) *0.4 * SS->getGoalWidth() );soc=kickTo(pos,SS->getBallSpeedMax());ACT->putCommandInQueue( soc ); // 放入命令队列ACT->putCommandInQueue( turnNeckToObject( OBJECT_BALL, soc ));}(2)如果球不可踢且我是队友中最快到达球的队员,则去截球else if( WM->getFastestInSetTo( OBJECT_SET_TEAMMATES, OBJECT_BALL, &iTmp )== WM->getAgentObjectType() && !WM->isDeadBallThem() ) // 如果球不在我的控制范围下,但是当前能最快抢到球的是我,那我就去执行抢球动作{Log.log( 100, "I am fastest to ball; can get there in %d cycles", iTmp );soc = intercept( false );ACT->putCommandInQueue( soc );ACT->putCommandInQueue( turnNeckToObject( OBJECT_BALL, soc ));(3)其他情况按战略点跑位else if( posAgent.getDistanceTo(WM->getStrategicPosition()) >1.5 + fabs(posAgent.getX()-posBall.getX())/10.0) // 到了这里就是其他距离球相对远一点的人了,如果离自己的阵形点太远,就跑回自己的阵形点去。
拓展阅读《机器人踢足球》

机器人踢足球陈幼松机器人越来越能干了,除了在各个生产环节上干各种工作,甚至可以到太空修理卫星,入海底铺设电缆。
如今机器人又被组队进行足球赛,甚至是国际性的正式比赛。
1997年8月25日至28日,在日本名古屋举行了第一届机器人世界杯足球赛。
共有45支球队报名参赛。
比赛时每队各有5名队员出场,其中一人为守门员。
队员的外形同人毫无共同之处,而是直径约6厘米、能走动的圆柱形机器。
与其说它们在踢球,不如说是在用身子拱球。
比赛用的球是橘黄色网球。
球场有点像乒乓球台,但大小只有它的1/4左右。
球门长30厘米,高20厘米。
之所以把它称为足球赛,是因为比赛规则很像人举行的足球赛。
严重犯规的将被罚点球,体力(电池)消耗殆尽的队员将被替换下场,教练可以叫暂停以“改变作战方法”(修改软件),如果双方队员在10秒钟内找不到球,裁判将判中止比赛。
机器人运动员虽然动作笨拙,但速度快,使比赛充满紧张感。
它们能表演中距离射门和三角传球等技艺。
有时也会出洋相,如,愣头愣脑的机器人不去踢球而是拼命撞对手,有的机器人被抵在墙上动弹不得,有的机器人自破家门的次数比攻破对方球门的次数还多。
机器人最突出的是需要相互配合,协同动作。
踢球时是两军对垒,必须从全局出发,考虑自己应该怎样对付一个个对手。
这正是当前智能机器人控制中的前沿问题。
因为人类需要用一群机器人来完成某项任务时,相互协作成为关键问题。
目前采取两种方式解决。
一种是集中控制,所有机器人都要把观察到的情况和自己做出的分析判断,及时报告给中央计算机,或将用装在球场上部的摄像机拍下的情况直接告诉中央计算机,由中央计算机从全局考虑分别指示各个机器人应该怎么做。
这种方式的优点是容易做出正确决策,但需要向上报告和往下指示,影响反应速度。
另一种是独立控制,由各个机器人自己审时度势,决定自己该怎么做。
这要求机器人有更高智能。
这种方式优点是能快速做出反应,但协作往往不够理想。
机器人世界杯足球赛因为是两军对垒,明确规定只能用独立控制。
类人机器人足球比赛2VS2竞赛规则

类人机器人足球比赛2VS2竞赛规则类人机器人,是具有人形态和动作的机器人。
1886 年法国作家利尔亚当在他的小说《未来夏娃》中将外表像人的机器起名为“安德罗丁”(android),就是一种人形机器人。
类人型机器人是21 世纪机器人技术发展的新方向和热点,机器人比赛作为机器人技术发展的展示平台,需要紧跟机器人技术的最新发展,故而推出类人机器人足球比赛。
类人型机器人比赛采用2 对2 的比赛形式,用组委会指定的足球,两人配合将足球射入对方的球门,在规定的时间内,进球多的队伍获胜。
一、参赛平台介绍(一)必须采用能力风暴系列机器人平台。
(二)必须有明显的2 只脚,2 只手,1 个头;(三)必须满足足部尺寸大小和高度的要求;(四)整体站立高度必须在30-42 厘米之间;(五)机器人由 16-18 个自由度组成(16-18 个伺服电机),腿部共10-12 个,其中每条腿5-6 个,手臂共6 个,其中每个手臂3 个;(六)高度指从双脚板到完全站立的机器人头顶的高度,包括类似天线的结构在内;(七)两足分离,两足间不能有连接,行进过程中需要双足交叉落地;(八)双足尺寸限制(参考下图)(九)脚底不能带任何吸附装置,一经发现将取消比赛资格;(十)机器人采用无线遥感控制的控制方式;(十一)机器人必须自带电池;(十二)机器人不能带有激光、导航脉冲、电磁铁等故意干扰对手控制器的无线装置;(十三)机器人不可携带或者向对方喷射液体、粉末或气体;(十四)双方的机器人各自要有明显的标示和编号,分别贴在机器人身上,以方便裁判区分参赛双方;二、竞赛场地及设备标准(一)场地长240cm ,宽160cm ,高18cm。
(二) 墙壁:由木板制成,墙壁内侧为白色亚光。
(三) 球门:球门位于场地底线的中间,球门宽60cm,深15cm。
(四) 基板:球场铺有一张场地纸,材质为磨砂写真,尽量保持平整和水平,组委会无法保证绝对平整。
(五) 球门区:从球门线两端向中场延伸20cm的矩形区域。
机器人足球技术介绍(基础版)-SimuroSot 5vs5

返回球场信息
平
动态 连接
底 层
台
库
程
给机器人指定驱动力 (dll)
序
仿真系统与实体系统的比较
平台相当于足球机器人系统中的机器人实体、比赛场地、CCD摄像头 DLL相当于实体系统中的计算机主机,相当于机器人的大脑,它获取
场上信息,然后将处理结果发送给平台 平台和DLL每个周期互相交换数据,保证了比赛的实时性 理论上每个周期时长为1/60S,在一个周期,DLL接受平台传递过来的信息
void PositionAndStop(Environment *env,int robot,Vector3D pos ,double bestangle,double limit) //PositionAndStop 让robot 跑到pos,并且停下来,bestangle 是停下来之后的朝向,limit控制停在pos附近的距离
常用底层函数
void Angle( Environment *env, int robot,double angle) //Angle 让robot转到angle的方向
void Angle( Environment *env, int robot,Vector3D pos) //Angle 让robot转到正对pos的方向
机器人足球
机器人足球比赛淋漓尽致地表现现实世界的基本特征,即分散存在的一个群 体与另一个群体在动态复杂环境中如何以实时方式进行竞争和行动决策的问 题.在足球比赛中充满着队员之间协调与合作之美,决策与智谋之美,生命与力 量之美及超级的艺术之美。
机器人足球,它以高技术对抗的形式赢得了学术界的认同。一年一度的FIRA CUP也同时召开国际学术会议,推动相关科技的发展。机器人足球成为高科技与 体育,学术与兴趣,科技与娱乐的完美结合,这便是它发展的活力所在。
17版电教足球机器人使用手册
S:信号线 +:正极(5V) -:负极
硬件连接 红外测距传感器按左、前、右、后的顺序依次接于足球机器人控制器上的 ADC 1-4 口
前
传感器 左测距 前测距 右测距 后测距
接口 ADC 1 ADC 2 ADC 3 ADC 4
左
右
后
软件编程 在软件编程中,控制函数为: getadc(int adc):读取插在模拟输入口上传感器的数值,adc 为模拟输入口端口号(1-4),
-1-
竞赛机器人使用手册
第一部分 硬件原理与功能 1.1 足球机器人整体介绍
8
6
1
5
10
2
7
4
3 9
17 版电教足球机器人
序号 1
端口
竞赛专用电机 III_S6_K1
功能说明
机器人重要的驱动装置,通过电机转动带动轮子的滚动,实 现机器人的移动,既可以前进后退,又可以左转右转。
2
竞赛专用轮胎_50 型 耐磨材料制成,抓地力强。
X510Z 控制板端口介绍
X510Z 控制板上包含 10 路高速模拟输入口,4 路数字输入输出口,2 路辅助电机驱动口,2 路 电机接口,1 路通用串行接口,1 路指南针专用口,1 路电源口等,具体参考如下:
7
14
12
13
11210源自4139
5
KM
M3
8
序号 1 2 3 4
M1 6
6 M2
端口 模拟输入口 (ADC1-6) 模拟输入口 (ADC7-10)
摄像头蓝牙手柄蓝牙无线5usart3通信蓝牙app等6电机口可以控制2路电机的正转反转与停止7弹射电机口km用于控制电磁铁弹出8盘球电机口m3用于控制1路电机转动显示屏插槽9用于安装触摸屏lcd电源输入口10输入电压范围为620v连接电源时注意正负极pwr11电源开关用于连接电源运行按钮12运行程序run复位按钮13停止程序rst蜂鸣器14机器人的发音装置spk15下载口用于机器人与计算机通讯下载程序等16开机指示灯足球机器人开机界面介绍prg变量值电池当前电压值程序列表当前程序设置电机驱动原理该控制器可控制2路电机变速以及变向运转该电机驱动卡提供单路20a持续电流45a峰值电流的驱动能力允许扩展的最大电压值为25v
FIRA仿真型机器人足球(Simuro5v5)比赛规则中文版
FIRA SimuroSot 5vs5 (仿真)比赛规则1.介绍以下规则用于FIRA 中型组仿真比赛2. 仿真平台1. 计算机配置2. 场地尺寸赛场为黑色(不反光的)木质长方形场地,其尺寸是220cm×180cm ,带有5cm 高,2.5cm 厚的围墙。
围墙的侧面为白色,围墙顶部为黑色。
在场地的四角固定四个7cm×7cm 的等腰三角形以避免球进入角落。
3. 场上标记比赛场地标记如图1 所示。
中圈半径是25cm 。
作为罚球区的一部分的圆弧沿球门线长25cm ,垂直于球门线5cm。
主要直线/圆弧(中线、门区边界线和中圈)均为白色,3mm 宽。
争球时机器人的站位标记为灰色。
4. 球门,门线与门区球门宽40cm.门线是恰好位于球门前长40cm 的直线。
门区(图1 中的区域A)包括位于球门前尺寸为50cm×15cm 的长方形区域。
5. 罚球区罚球区(图1 中的区域A,B)包括球门前尺寸为80cm×35cm 的长方形区域及其附属弧形区域.3. 比赛过程1. 时间比赛分两个半场,每半场5 分钟,中场休息10 分钟。
在换人、暂停或其它必要情况下,官方计时员将暂停计时。
如果一支球队在中场休息时间没有准备好,不能继续开始下半场比赛,休息时间可以延长5 分钟。
若在延时之后球队仍未准备好继续比赛,则将取消其比赛资格。
2. 暂停操作者可向裁判要求暂停。
在一场比赛中每队有权暂停2 次,每次将持续2 分钟。
3. 记时仿真平台上的记时器不能代替官方记时器,比赛中应当使用专门的记时器. 4. 比赛中断只有在下列情况下比赛中断并由一个操作者重新布置机器人:1.破门得分或出现犯规2.裁判员判点球,争球,球门球,任意球3.仿真平台出现问题4.有不可预知的情况发生,如计算机自动重启,突然停电5.运动员如果一个机器人位于己方的球门区内,应当被视为守门员。
(一个机器人有多于50%在门区内就认为该机器人在门区内,这一点由裁判员来判断。
机器人足球比赛
式同上。如果点球未中,换由对方在原点球位开任意球。
上一页 下一页 返回
8. 1机器人足球比赛(2 vs 2)
• 7.防守违例 • 防守ห้องสมุดไป่ตู้的两个机器人不能同时在己方球门线前主动停留超过5s;防守
方任一机器人身体的任何部分均不能主动越过己方球门线进入球门里 面。 • 8.坠球 • 由裁判员将足球放在距原先位置最近的坠球点上,双方机器人可摆放 在距足球15cm以外的任意地方;裁判吹哨后,开始继续比赛。在摆放 机器人位置时,各队在自己半场具有优先摆放权。 • 9.任意球
上一页 下一页 返回
8. 1机器人足球比赛(2 vs 2)
• 比赛开始前,每队有2 min的准备调试时间,比赛时钟将持续计时(两 个5 min半场),不会停止,计时器由主裁判来控制。由于坠球、罚点 球及其他原因损失的时间均应扣除。
• 加时赛:比赛需有胜负时,且双方在10 min比赛中打成平局,另加加 时赛。加时赛分上下两个半场,各2 min,中间不休息。加时赛规则 同上(包括猜边、开球等)。加时赛采取突然死亡法,即一方进球后比 赛结束。
上一页 下一页 返回
8. 1机器人足球比赛(2 vs 2)
• 机器人临时下场次数不限,此间,比赛正常进行。 • 15.换球 • 在比赛进行中,未经裁判员许可,不得更换比赛用球。如果比赛中,
足球发生不亮或破裂等情况时,应立即中断比赛,用新的足球在比赛 中断时原球所在地最近的坠球点以坠球恢复比赛。 • 16.红黄牌制度 • 比赛过程中,累计技术性犯规满三次为一张黄牌,两张黄牌累计一张 红牌,红黄牌不带入下一轮比赛。在比赛中,如有参赛队员不服从裁 判裁决,顶撞裁判,可出示黄牌警告,情节严重者可出示红牌驱除出 场,换另外一名参赛队员。
机器人足球实验报告

引言概述:足球是一种结合了机械工程、电子工程、计算机科学和等多个领域的综合性研究课题,它旨在通过开发智能,实现在足球比赛中与人类球员对抗的目标。
本实验报告将对足球进行详细分析和阐述,包括足球的背景、系统架构、技术挑战以及未来发展方向等方面。
一、足球的背景1.1足球的起源和发展历史1.2足球的意义和作用1.3国内外足球发展现状二、足球系统架构2.1足球的硬件组成2.2足球的软件系统2.3足球的通信系统三、技术挑战及解决方案3.1运动控制与路径规划3.1.1足球运动控制的基本原理3.1.2足球路径规划的算法与方法3.1.3足球的运动学建模3.2视觉感知与目标识别3.2.1足球的视觉感知技术3.2.2足球图像处理与分析3.2.3足球目标识别的算法3.3协同与策略3.3.1足球的协同控制策略3.3.2足球的团队协作策略3.3.3足球的智能决策算法四、足球的应用领域4.1教育领域的足球应用4.2工业和制造领域的足球应用4.3娱乐和娱体领域的足球应用五、足球的未来发展方向5.1足球竞赛的推广与普及5.2足球的技术突破与创新5.3足球与的结合总结:在本文中,我们对足球进行了全面的分析和阐述。
从足球的背景和起源开始,我们介绍了足球的系统架构,详细探讨了足球所面临的技术挑战,并给出了相应的解决方案。
我们还介绍了足球在教育、工业和娱乐等领域的应用,并展望了未来足球的发展方向。
通过本文的阐述,我们可以看到足球在实际应用中的重要性和潜力,相信在未来会有更多的技术突破和创新,在领域发挥更大的作用。
机器人足球控制与决策系统设计与实现

机器人足球控制与决策系统设计与实现机器人足球是指通过机器人参与的足球比赛。
机器人足球的控制与决策系统是指控制机器人在比赛中行动,并根据比赛情况进行决策的系统。
本文将讨论机器人足球控制与决策系统的设计与实现。
一、控制系统设计机器人足球的控制系统设计是指如何控制机器人的行动,使其能够有针对性地进行球员移动、球的传递和射门等动作。
以下是一些常用的控制系统设计方法:1.1 基于传感器的反馈控制机器人足球通常配备了各种传感器,如视觉传感器、陀螺仪、距离传感器等。
基于传感器的反馈控制方法可以根据传感器提供的信息,调整机器人的行动。
例如,通过视觉传感器检测到球的位置和其他球员的位置,可以决策机器人应该向何处移动以及何时进行射门。
1.2 协同控制机器人足球是一个团队比赛,多个机器人需要协同合作。
因此,协同控制是一种重要的设计方法。
协同控制可以通过定义机器人之间的协同策略和通信协议来实现。
例如,可以设计机器人之间的通信协议,使机器人能够相互传递位置信息和战术指令,以实现更好的协同。
1.3 机器学习方法机器学习方法可以让机器人从比赛中积累经验,逐渐改进自己的控制策略和决策能力。
例如,可以使用强化学习算法让机器人根据比赛结果调整自己的行动。
这种方法可以让机器人在比赛中逐渐提高自己的控制能力。
二、决策系统设计机器人足球的决策系统设计是指如何根据比赛情况做出决策,例如选择何时射门,何时传球等。
以下是一些常用的决策系统设计方法:2.1 规则基础决策系统规则基础决策系统是一种简单而直接的方法,根据预先定义的规则来做出决策。
例如,可以通过定义规则来判断何时应该传球给队友,何时应该射门等。
这种方法可以在一些简单情况下得到较好的效果,但对于复杂的比赛情况可能不够灵活。
2.2 基于状态机的决策系统基于状态机的决策系统可以根据比赛情况自动转换机器人的状态,从而做出相应的决策。
例如,可以定义不同的状态,如进攻状态、防守状态等,并根据当前状态和比赛情况做出相应的决策。
机器人足球赛规则

足球对抗赛规则
一、机器人足球:(学龄前6-12岁)
1.任务说明:
以个人庭为单位,1VS1对抗,在规定的2分钟时间内控制自己的机器人,将放在中场的足球通过机器人争抢最后将球射进对方龙门,进球最多为获胜者。
2.使用器材:9797蓝牙机器人套装
3.本学龄前竞赛分为2个组别:6--8岁、6--12岁
4.竞赛规则:
1)每个队出1个队员,其中年龄必须是6--12岁,队员性别不限。
2)参赛2名队员,1VS1对抗,在规定的2分钟时间内控制自己的机器人,将放在中场的足球通过机器人争抢最后将球射进对方龙门,进球最多为获胜者。
3)竞赛用模型由乐高活动中心提供,球放在场地中间,机器人必须在各自的禁区内,当裁判发出比赛开始的哨声后,两方开始争球。
4)每组竞赛时间为2分钟,比赛期间参赛队伍可以在规定的赛台内自由跑动,直至将球射进对方龙门。
出现死球时,由裁判将机器人分开,双方队员在比赛中不能用手去碰机器人,用手碰机器人就算犯规一次,裁判吹响结束哨声,比赛结束。
5.计分标准:
1)竞赛结束后每个队员有1个成绩:进球的数量。
2)在规定的时间内,进球多的为胜者,如果二者进球数相同,由裁判安排加赛。
足球机器人

团队策略:一个有效 的策略通常需要团队 的协作。例如,一些 机器人可能被分配到 防守的任务,而其他 机器人则负责进攻
预测和反应:一个好的 策略需要能够预测对手 的行动并迅速做出反应 。例如,如果对手的机 器人正在向球门移动, 那么你的机器人需要立 即阻止它
适应变化:由于比赛情 况会不断变化,所以一 个好的策略需要能够适 应这些变化。例如,如 果对手改变了他们的策 略,你需要能够及时调 整你的策略来应对
4
机器人的设计和制造
机器人的设计和制造是RobCup小型足球机器人比赛的关键部分。这需要考虑许多因素,包 括机器人的稳定性、速度、力量、电池寿命、导航系统等等。参赛队伍需要对这些因素进 行权衡,以确定最佳的设计方案
稳定性:机器人在比赛中的表现可能会受到各种因素的影响,包括场地条件、电池寿 命等。因此,机器人的设计必须能够应对这些不确定性 速度和力量:机器人的速度和力量是影响其在比赛中表现的重要因素。因此,设计者 可能需要考虑如何提高机器人的速度和力量 电池寿命:电池寿命会限制机器人在比赛中的运行时间。设计者可能需要考虑如何优 化电池的使用,以延长机器人在比赛中的运行时间
比赛的几个基本规则包括
比赛规则
机器人规格:每个参赛队 伍最多可以有5个机器人, 每个机器人的最大尺寸为 7厘米。此外,每个机器 人必须能够自主移动和操
作
比赛时间:每场比赛通常 为2分钟,或者当球被踢 进对方球门时比赛结束
得分规则:在比赛中,机 器人可以用身体的任何部 分将球踢入对方球门得分, 但是只有在球完全越过球 门线时才算得分。如果球 碰到门柱或横梁,不算得
20XX
足球机器人
目录
-
1 比赛简介 2 比赛规则 3 比赛策略 4 机器人的设计和制造 5 结论
机器人足球培训计划

机器人足球培训计划一、培训目的和意义足球是一项团队合作的运动,对身体素质、技术水平和心理素质都有着较高的要求。
而现今的足球比赛中,机器人足球已经逐渐成为一种新的趋势。
机器人足球培训计划的目的在于通过专业的培训,提高学员的足球技术,增强其团队合作能力,培养其团队精神,提升其身体素质和心理素质,从而为未来的机器人足球比赛做好准备。
二、培训对象本培训计划主要面向机器人足球爱好者、学生和相关领域的科研人员。
培训对象的年龄范围为8岁-25岁,性别不限。
三、培训内容1.基本足球技能- 传球、盘带、射门、头球等基本足球技能的训练- 双脚技术训练- 控球和传球的训练2.团队合作- 球队协作演练- 分工合作训练- 防守和进攻的配合训练3.身体素质训练- 足球运动员必备的体能训练- 身体柔韧度和力量的提升- 耐力和爆发力的训练4.心理素质培养- 压力适应训练- 战术意识培养- 毅力和自信心的培养5.机器人足球比赛规则讲解和实战训练四、培训方式1.理论授课- 通过足球训练视频、篇章和实战案例,讲解足球技术和战术等相关知识。
2.技能训练- 专业足球教练进行现场指导和实际操作,通过集中训练和个人辅导,提高学员的足球技术水平。
3.团队合作训练- 组织足球比赛、集体训练和分组活动,提高学员的团队协作能力。
4.实战演练- 在真实的比赛场地和条件下,让学员进行实战演练,提高学员的比赛经验和战术意识。
五、培训时间和地点本培训计划将在校园足球场、体育馆和相关青少年训练基地进行。
培训时间为每周6天,每天2小时,持续培训3个月。
六、培训目标1. 培养学员的足球技术,提高其球技水平。
2. 增强学员的团队合作意识,提高其团队协作能力。
3. 提升学员的身体素质和心理素质,培养其比赛意识和毅力。
4. 培养机器人足球比赛的参赛选手,提高学员在比赛中的表现和成绩。
七、培训效果评价1. 足球比赛成绩- 组织校内足球比赛,通过比赛成绩来评价学员的足球技术和团队合作能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• give:一般用法为 “give somebody A” 或者 “give A to somebody”。作为任务,要求最终物体 A 的位置在 “somebody” 所在的位置,并且它不在 机器人的手爪中或盘子上。 • put:一般用法有两种,第一种 “put A in /on/near /next to /down toB”,要求最终物体 A 在物体 B 所在的位置(B 位置不变),并且它不在 机器人的手爪中或盘子上,如果是 in 关系,表明 将 A 放到 B 内部。第二种 “put A down” 或者 “put down A”,要求 A 不再在机器人的手爪中或 盘子上。
机器人移动
• move(X):机器人移动到位置X。执行条件为机器 人不在此位置。执行效果为机器人移动到了位置X, 不受此行动影响的其他状态属性不变。 • 例如机器人在位置0,执行move(5)的动作之后, 机器人的位置就变成了5,如果机器人的手爪或者 盘子上面有物体,相应的物体也移动到5。 • 注意:这里的X是位置编号,后面几个动作的X代 表物体编号。
info 含义如下:
• on(obj1, obj2):表示物体 obj1 在 obj2 上面。 解释为在场景中,obj1与 obj2 在相同的位置,并 且 obj1 不在机器人上。 • near(obj1, obj2):表示物体 obj1 在 obj2 旁边。 解释为在场景中,obj1与 obj2 在相同的位置。 • onplate(obj):解释为物体 obj 在机器人盘子上。 • inside(obj1, obj2):表示小物体 obj1 在大物体 obj2 里面。 • dooropen(obj):表示物体 obj 的门处于打开状态。
抓起与放下物体
• catch(X):机器人拿起物体X。执行条件为:X在 机器人的可取范围内(机器人与X 在同一个位置 内),X可以拿的动(X是小物体),并且机器人手爪 没有拿其他东西。执行效果为机器人手爪拿起了 物体X,其他状态属性不变。 • putdown(X):机器人放下物体X。执行条件为机器 人手爪正拿着物体X。执行效果为机器人手爪不再 拿任何东西,其他状态属性不变。
家庭仿真基本规定
__AUA@Home
场景描述 • 场景描述规定当前机器人所面临的环境状 态,即当前环境中出现的物体及其属性, 包括物体的种类、位置和其他属性,以及 机器人的状态等。 • 仿真家庭机器人是一个3D 仿真机器人,在 演示中可以看到机器人的外貌和立体时空 场景,而我们在开发和研究时,要对他们 进一步抽象处理。
被执行open,close,putin,takeout)
指令交互:指令的描述
• 指令中任务目标task定义如下(obj1 与obj2 为指令中物 体): • task:= give(human, obj1) | puton(obj1, obj2) |goto(obj1) |putdown(obj1) | pickup(obj1) | opendoor(obj1) | putin(obji;obj2) • 指令中补充信息info定义如下: • info:= on(obj1, obj2) | near(obj1, obj2) | onplate(obj1)|inside(obj1, obj2) j dooropen(obj) • 指令中约束cons定义如下: • cons:= not task | not info | not not info • 指令ins:= task | info | cons。 比赛中用到的指令集是ins的集合。
பைடு நூலகம்
副词 there, not
名词 plate, 所有物体的种类
任务描述
• 对于任务描述中的目标,一般用祈使句表 达,例如:“Go to the table.”, “Pick up the bottle which is on the chair.”。 其中主动动词含义解释如下(解释为对物 体位置和机器人状态的要求,其中 A, B 指某个物体)
• 下面给出这些指令的含义。
• give(human, obj):表示将物体 obj 给用户。 obj 是 “小物体”,要求 obj 最终在用户的位 置,并且它不在机器人的手爪中或盘子上。 • puton(obj1, obj2):将物体 obj1 放到 obj2 上 面。obj1 是 “小物体”,要求 obj1 在 obj2 所在的位置 (obj2 位置不变),并且它不在机器 人的手爪中或盘子上。 • goto(obj):机器人移动到 obj 所在的位置。
任务描述
• 人机交互是家用机器人仿真比赛关注的一 个重要方面。此次比赛中,参赛程序需要 利用用户提供的任务描述,计算出相应的 行动规划,其中,通过用户给出任务描述 来体现人机交互。 • 任务描述分为三种类型:目标、约束和补 充信息。
• 用户给定的目标代表用户要求机器人完成的工作, 对应于希望达到的目标状态。“Give me the green bottle.”,表示用户希望最终“green bottle” 与用户在同一位置。 • 约束表示完成给定任务过程中必须遵守的约束条 件,或者环境所满足的约束条件,例如“Do not catch any bottle on the table.”,表示在整 个执行过程中,机器人都不能拿“table” 上的 “bottle”。
• 用户还可以提供关于初始场景的一些补充 信息,例如“The red bottle is on the table.” 即使在初始场景描述中没有规定 “red bottle” 的位置,也可以根据这条 信息和“table”的位置推出“red bottle” 的位置。
任务描述方式
• 任务描述用两种方式表达,相应的比赛分 为两个项目,其中一个用词汇受限的自然 语言(英语)来表达任务描述,另一个用 一些确定的指令表达(相比自然语言的语 法,指令表达式更清晰准确)。
指令交互:任务中物体的描述
• 用adj来概括物体的大小和颜色。 • adj:= big | small | white | black | red | green | yellow | blue • 用obj来表示物体,物体可以没有颜色的描 述,但一定要有物体种类(sort)的描述。 • obj := sort|adj sort • 场景描述中物体的种类清单如下:
对内部物体的操作
• putin(A;B):机器人将小物体 A 放到 B 中。执 行条件为机器人和 B在同一个位置,A 在机器人 手抓中,并且 B 的门打开。执行效果为,小物体 A 在 B 的内部,机器人手抓为空,其他状态属性 不变。 • takeout(A;B):机器人将小物体 A 从 B 中取出 来,执行条件为机器人和 B 在同一个位置,A 在 B 中,机器人手抓为空,并且 B 的门打开。执行 效果为,机器人抓住小物体 A, 并且 A 处于 B 的外部,其他状态属性不变。
• putdown(obj):机器人放下物体 obj。obj 是 “小物体”,要求 obj 不再在机器人的手爪中或 盘子上。 • pickup(obj):机器人拿起物体 obj。obj 是 “小物体”,要求机器人的手爪握住 obj 或者 obj 在盘子上。opendoor(obj): 机器人打开 obj. 要求 obj 被打开, 即 dooropen(obj)成立。 • putin(obj1, obj2): 机器人将小物体 obj1 放到 obj2 中,要求 obj1 在obj2 内部,并且 obj2 处于关闭状态。
位置3: television green bottle yellow book 位置6: air conditioner
机器人状态 • 机器人有一个手爪,一个盘子,它们上面 是否有东西也决定机器人的状态。 • location:机器人所在的位置,与物体位 置的表达相同,机器人手爪和盘子上的东 西也和机器人有同一位置。 • plate:机器人盘子的状态,赋值为empty 或者某个“小物体”的编号。 • hold:机器人手爪的状态,赋值为empty 或者某个“小物体”的编号。
机器人对盘子的操作
• toplate(X):机器人将物体X放入自己的盘子中。 执行条件为机器人手爪拿着X,盘子中没有其他物 体。执行效果为机器人手爪不再拿任何东西,X在 盘子中,其他状态属性不变。 • fromplate(X):机器人将物体X从盘子中拿起。执 行条件为X在机器人盘子中,机器人手爪没有拿其 他物体。执行效果为X不再在盘子中,机器人手爪 拿着X,其他状态属性不变。
自然语言词汇表
词汇类型 词汇 代词 me 冠词 a, an, the 助动词 must 动词 do, be, give, put, go, catch 介词 on, near, next, to, down, which 形容词 white, black, red, green, yellow, blue, big, small
• human(场景中唯一出现的用户), couch, chair, table,teapoy, book, can, remote control, television,bottle, plant, cup, sofa, air conditioner, workspace, worktable,bed, desk, cupboard, refrigerator, wash machine,closet。(注:后四种物体可以
自然语言交互项目
• 自然语言交互项目中,用户用词汇受限的英 语来表达任务描述。词汇表虽然受限,但运 用这些词汇仍然可以构造出复杂的句子和多 种等价的表达。例如: • “Give me the red bottle which is near the green bottle.” • “The cup which is white is on the table.” • “There must be a bottle on the desk.”
• 比赛中所用的场景描述以文 件形式存储,具体格式将在 后面的课程中讲解。 • 问题求解往往不仅初始状态 描述,还需要一些领域知识, 例如,一个东西只能有一个 位置,机器人盘子中的东西 会随着机器人移动。这些知 识需要参赛者自己添加。