FX2N-1PG-E BFM设置
定位模块FX2N—1PG和伺服驱动实现纸张定位控制
定位模块FX2N—1PG和伺服驱动实现纸张定位控制作者:王林来源:《电子技术与软件工程》2017年第02期摘要采用三菱系列1PG定位模块改造传统单片机控制系统,能够实现精确定位,操作维护工作量减少,提高现场生产功效。
主要采用三菱FX1n-24MR PLC,三菱GOT1020-LBL触摸屏、三菱伺服驱动器及三菱伺服电机实现。
【关键词】定位伺服位置控制 PLC1 引言我公司主要生产线路板,但生产设备大部分是公司从世界各国如(台湾,美国,德国等等)购回的二手设备,其中有多台纸张切割机在公司剪裁车间用来切割玻璃纤维树脂板,供压合多层板使用,该设备是台湾活全公司20年前生产的产品,由于采用单片机控制,按键无法更换,时常出现接触不良,控制器主板烧坏严重,经多次外发珠海多能维修,使用不到一星期又是同样故障发生,严重影响车间的产量。
因此我们决定实施技术改造。
控制精度要达到或者高于前系统,同时操作调试、显示更快捷方便。
2 单片机切割系统的组成及工作原理原系统简述:该设备有三台电机拖动,分别是后段输送直流电机、切刀(0.75KW)异步电机和主传动步进电机。
直流电机带动张力滚筒摇臂的齿轮,再带动调速板电位器来控制直流电机的启停和调速,该调速系统是独立控制回路。
控制器外围采用传统的继电器控制,主电源采用三相交流220V控制,装置控制电源采用直流24V开关电源供电。
控制器和直流调速板采用220V供电。
继电器KM、KA、YC1、YC2也采用24V供电。
受单片机控制,外接I/O控制口用微动按钮操作,输出采用8段数码管显示(如图1所示)。
3 1PG和PLC控制的切割系统改造3.1 工作原理三菱FX1N-PLC采用顺序控制,操作按钮接在输入端,1PG通过排线与FX1N可编程控制器相连。
1PG输入主要由两部分组成(分别是FX1N的交换数据、外部急停按钮),1PG输出到伺服控制器端口分为两部分(分别是方向控制FP和RP端、清除端CLR)。
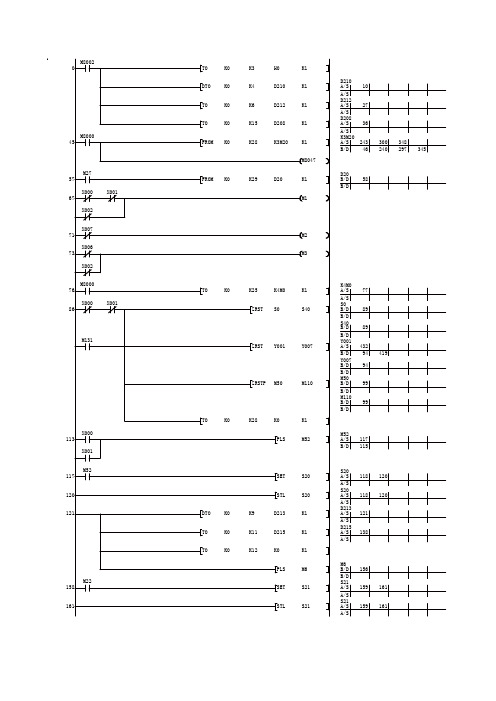
FX2N-1PG-E控制程序
>
DTO K0
K9
K10000 K1
* <写原点返回速度(爬行速度)
>
TO
K0
K11
K1000 K1
* <写原点返回的0点信号数目
>
TO
K0
K12
K1
K1
* <写原始位置
>
DTO K0
K13
K0
K1
* <写加/减速时间
>
TO
K0
K15
K100
K1
* <写运行速度
>
DTO K0
K19
K1000 K1
M8000 157
X006
原点兼左 限位
X010
M5
右限位
X006 M114
原点兼左 X6作为原 限位 点还是左
限位的切 换
M42 213
C2轴原点 返回结束 标志
M48 216
定位完成 标志
X012 218
正转
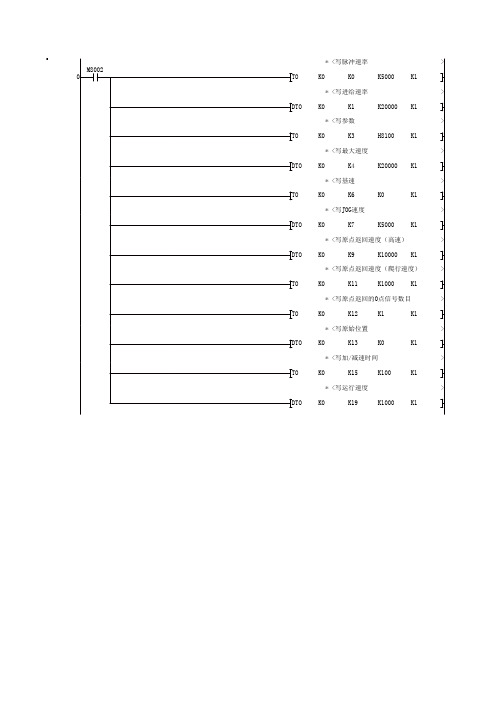
M70T9定位C2源自 等待C2轴 原点中 安全定位* <操作命令写入(M120-M136)
>
TO
K0
K25
M8002 0
* <写脉冲速率
>
TO
K0
K0
K5000 K1
* <写进给速率
>
DTO K0
K1
K20000 K1
* <写参数
>
TO
K0
K3
H8100 K1
* <写最大速度
>
DTO K0
K4
K20000 K1
浅谈FX2n—1PG的定位控制
浅谈FX2n—1PG的定位控制作者:周日祥来源:《职业·中旬》2013年第07期摘要:在定位控制系统中,常常需要采用大量的传感器作定位控制,使得在工程中安装的位置控制器较多,而且在较远程的位置安装更不方便,容易受外界的影响出现信号误差,造成位置偏差。
本文主要介绍三菱PLC定位模块1PG在定位控制中的应用,并通过实例介绍了与PLC的硬件联接与软件编程方法。
关键词:定位模块控制运行方式位置控制在自动化控制工业领域中,一直是人们关注的问题。
位置控制从初始的机械开关再到现在的传感器,定位控制从以前通过编码器反馈信号到现在的1PG、20GM等定位模块,人们一直在想办法让位置控制变得更可靠、更便捷。
对于定位控制,PLC无疑是被首先选择的,它可靠性高,程序编辑、修改和调试便捷。
另外,在PLC扩展一个定位模块无需在硬件处理上花太多的精力,而且它可以采用积木式结构不断扩展,从而有效地控制1台到8台的定位模块可实现多轴联动的控制方式。
一、FX2n-1PG简介FX2n-1PG脉冲输出模块相当于一种脉冲发生器单元。
1PG脉冲输出模块是一种根据PLC 功能指令FROM/TO指令进行与FX系列PLC进行数据交换的特殊功能模块。
用一台FX-1PG 脉冲模块可以独立进行轴定位控制,而一台PLC则最多可连接8台1PG,也就是说可以实现8个独立的操作。
FX-1PG脉冲输出模块的主要技术指标如下:①可输出最高频率为100kbit/s的脉冲;②定位目标的追踪、运转速度及各种参数通过PLC用FROM/TO指令设定;③除脉冲序列输出外,还备有各种高速响应的输出端子,而其他的I/O通常需要通过PLC进行控制;④编制定位用程序不需专用程序设计工具,用PLC的程序就可以控制。
定位数据的设定和瞬时位置的显示均可通过PLC实现。
二、系统的组成及控制方式FX2n-1PG系统的组成要观察现场实际需要而定。
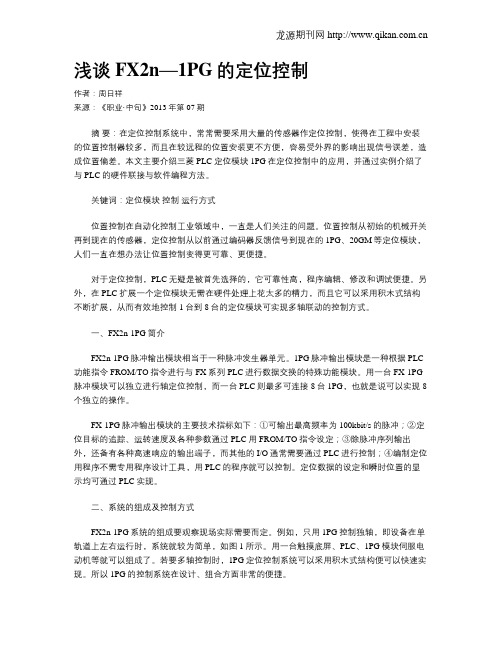
例如,只用1PG控制独轴,即设备在单轨道上左右运行时,系统就较为简单,如图1所示。
定位模块1PG实际运行设定程序
FX2N-1PG实际工程中的设定程序
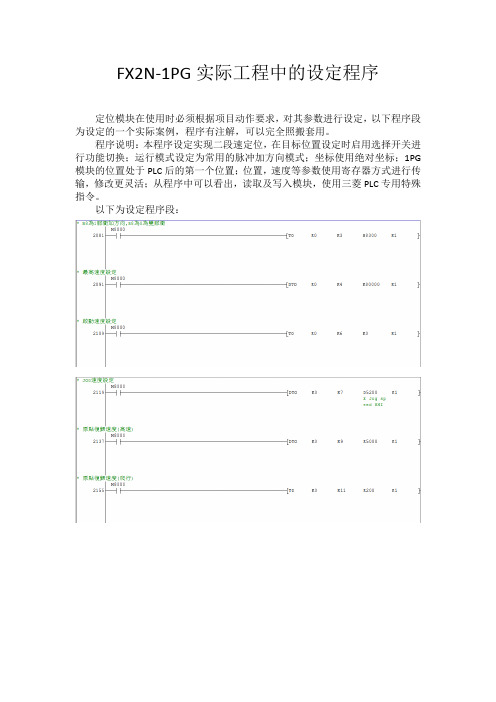
定位模块在使用时必须根据项目动作要求,对其参数进行设定,以下程序段为设定的一个实际案例,程序有注解,可以完全照搬套用。
程序说明:本程序设定实现二段速定位,在目标位置设定时启用选择开关进行功能切换;运行模式设定为常用的脉冲加方向模式;坐标使用绝对坐标;1PG 模块的位置处于PLC后的第一个位置;位置,速度等参数使用寄存器方式进行传输,修改更灵活;从程序中可以看出,读取及写入模块,使用三菱PLC专用特殊指令。
以下为设定程序段:。
三菱FX-1PG步进电机程序
23 0 24 0
DO T DO T K 0 K 0 K7 1 K9 1
SL T D 8 D0 20 PS L
M0 2 20 4 M0 6 M0 2 23 4 27 4 28 4 X0 04 29 4 22 5 X0 01 23 5 X0 00 26 5 29 5 20 6
DO T DO T K 0 K 0 K7 1 K9 1 SL T D0 22 D0 24 ST E S6 2 ST E SL T S5 2 S5 2
M0 11 M1 5
X0 00 M0 11
M0 10 AS / BD / M0 11 AS / BD /
33 6 31 6 36 6 34 6
30 7 35 6 33 7 37 8 41 0 33 9
X0 00 M0 12
M0 12 AS 31 / 7 BD 31 / 8
45 2
33 8 38 9
36 8
32 9
46 0
X0 01
M0 12 M0 13
M0 13 AS 38 / 7 AS /
34 8
40 0
47 0
M0 14
M0 14 AS 12 / 6 AS /
M0 11 M0 11
T0 1 T0 1
AT L
K 5 T0 1
M0 15
T0 1 AS / BD / M0 15 AS / BD / M0 15 AS / BD / Y0 01 AS / BD /
49 1
T O
K 0
K8 2
K 0 PS L
K 1 M2 5 M2 5 AS / BD / 17 1 15 1
X0 00 13 1 X0 01 M2 5 17 1 10 2 11 2
FX2N-1PG学习笔记(完成)
FX2N-1PG定位模块一、介绍FX2N-1PG为脉冲发生器单元(简称PGU),可以完成一个独立轴的简单定位控制,通过向伺服电机或步进电机的驱动器提供指定数量的脉冲(最大100Kpps)来实现的。
FX2N-1PG是连接FX2N系列PLC的扩展模块,使用FROM/TO指令来与PLC进行数据传输,并占用8点输出或输入点。
二、端子的分配1、LED显示2、端子的分配3、步进电机接线图.4、三菱伺服电机MR-E接线图.三、缓冲存储器BFM一览表四、参数设置1、BFM#0 脉冲速率是驱动器使电机旋转一圈所需要的输入脉冲的数目,它不一定是电机每一圈所产生的编码器脉冲数目,根据电子齿轮比而有所不同。
注:如果电机系统的单位被选择时,无须设置该参数。
2、BFM#2、#1 进给速率是电机转动一圈时的机器移动量,根据用途有不同的单位。
注:如果电机系统的单位被选择时,无须设置该参数。
3、BFM#31)单元系统(b1、b0)影响的位置数据:HP、P1、P2、CP;影响的速度数据:V max、V bia、V JOG、V RT、V1、V2;2)定位数据的倍数(b5、b4)注:定位数据HP、P1、P2和CP均可以如上表中所示的倍数。
3)脉冲输出格式(b8)设置为0时,为正反脉冲输出;(FP发出正脉冲;RP发出反脉冲)设置为1时,为方向与脉冲输出。
(FP发出方向信号;RP发出脉冲信号)4)旋转方向(b9)设置为0时,每一个前向脉冲(FP),当前位置(CP)值就增加一次;(顺向)设置为1时,每一个前向脉冲(FP),当前位置(CP)值就减少一次。
(反向)5)原点返回方向(b10)设置为0时,在返回原点的过程中当前位置(CP)值减少;(反向)设置为1时,在返回原点的过程中当前位置(CP)值增加。
(顺向)6)DOG输入极性(b12)设置为0时,当工件接近原点时,DOG(近原点信号)打开;设置为1时,当工件接近原点时,DOG(近原点信号)关闭。
一文教你读写BFM来操作模拟量模块
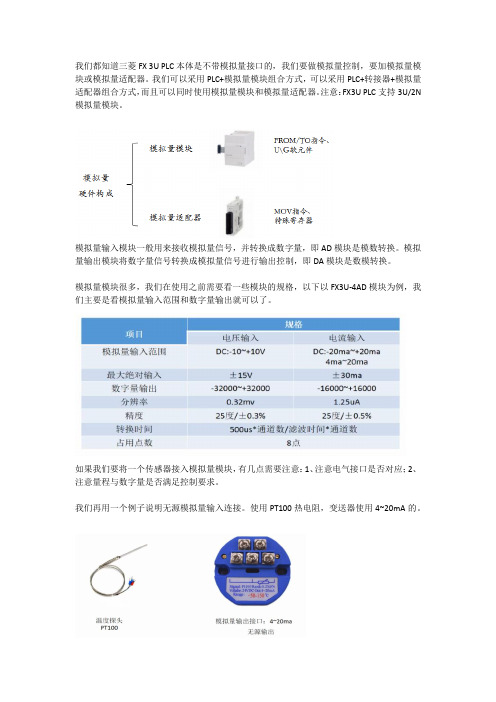
我们都知道三菱FX 3U PLC本体是不带模拟量接口的,我们要做模拟量控制,要加模拟量模块或模拟量适配器。
我们可以采用PLC+模拟量模块组合方式,可以采用PLC+转接器+模拟量适配器组合方式,而且可以同时使用模拟量模块和模拟量适配器。
注意:FX3U PLC支持3U/2N 模拟量模块。
模拟量输入模块一般用来接收模拟量信号,并转换成数字量,即AD模块是模数转换。
模拟量输出模块将数字量信号转换成模拟量信号进行输出控制,即DA模块是数模转换。
模拟量模块很多,我们在使用之前需要看一些模块的规格,以下以FX3U-4AD模块为例,我们主要是看模拟量输入范围和数字量输出就可以了。
如果我们要将一个传感器接入模拟量模块,有几点需要注意:1、注意电气接口是否对应;2、注意量程与数字量是否满足控制要求。
我们再用一个例子说明无源模拟量输入连接。
使用PT100热电阻,变送器使用4~20mA的。
以下就是其接线图,PT100热电阻接到变送器,变送器再接到FX3U-4AD模块中。
注意:接电流信号的时候,需要将V+和I+短接起来。
硬件连接起来之后就是根据模块手册,也就是模块的BFM缓冲器,通过FROM/TO指令进行读写,或者使用U\G软元件的方式也可以。
换句话说就是,用户要通过FROM/TO指令或智能软元件U\G,读取BFM或写入BFM来操作特殊功能模块。
FROM和TO指令怎么使用呢?下面简单的来看一下吧。
FROM指令:当X0接通时,把位置编号为m1的特殊模块中以BFM#m2为首址的n个缓冲存储器的内容读到PLC中以S为首址的n个16位数据单元里面。
TO指令:当X0接通时,把PLC中以S为首址的n个16位数据的内容写入到位置编号为m1的特殊模块中以BFM#m2为首址的n个缓冲存储器里面。
了解了指令的使用之后,那么接下来我们开始学习模拟量模块和对应的程序编写。
我们以模拟量输入模块FX3U-4AD为例进行讲解。
模拟量输入模块使用流程包括几个部分,1、确定单元号;2、模块型号判断;3、模块状态判断;4、输入模式设置;5、平均值设置;6、数字滤波器设置;7、当前值读取。
浅谈FX2n-1PG的定位控制
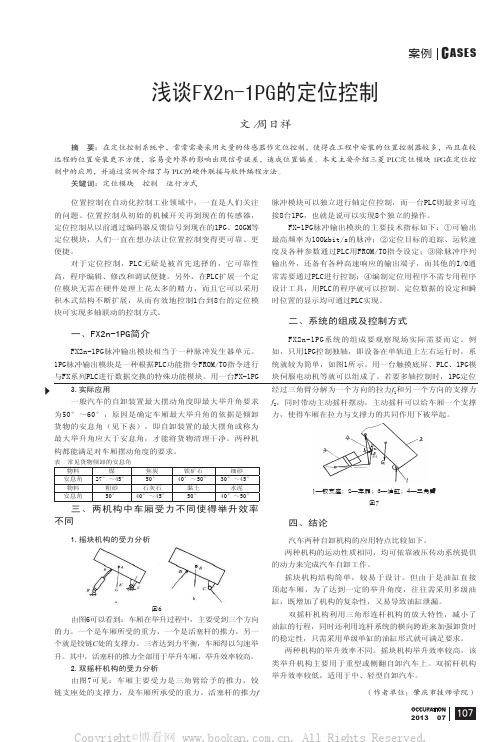
案例C ASESOCCUPATION1072013 07浅谈FX2n-1PG的定位控制文/周日祥摘 要:在定位控制系统中,常常需要采用大量的传感器作定位控制,使得在工程中安装的位置控制器较多,而且在较远程的位置安装更不方便,容易受外界的影响出现信号误差,造成位置偏差。
本文主要介绍三菱PLC定位模块1PG在定位控制中的应用,并通过实例介绍了与PLC的硬件联接与软件编程方法。
关键词:定位模块 控制 运行方式3.实际应用一般汽车的自卸装置最大摆动角度即最大举升角要求为50°~60°,原因是确定车厢最大举升角的依据是倾卸货物的安息角(见下表),即自卸装置的最大摆角或称为最大举升角应大于安息角,才能将货物清理干净。
两种机构都能满足对车厢摆动角度的要求。
物料煤焦炭铁矿石细砂安息角27°~45°50°40°~50°30°~45°物料粗砂石灰石黏土水泥安息角50°40°~45°50°40°~50°表 常见货物倾卸的安息角三、两机构中车厢受力不同使得举升效率不同1.摇块机构的受力分析图6由图6可以看到:车厢在举升过程中,主要受到三个方向的力。
一个是车厢所受的重力,一个是活塞杆的推力,另一个就是铰链C 处的支撑力。
三者达到力平衡,车厢得以匀速举升。
其中,活塞杆的推力全部用于举升车厢,举升效率较高。
2.双摇杆机构的受力分析由图7可见:车厢主要受力是三角臂给予的推力,铰链支座处的支撑力,及车厢所承受的重力。
活塞杆的推力f经过三角臂分解为一个方向的拉力f 1和另一个方向的支撑力f 2,同时带动主动摇杆摆动,主动摇杆可以给车厢一个支撑力,使得车厢在拉力与支撑力的共同作用下被举起。
1—铰支座;2—车厢;3—油缸;4—三角臂图7四、结论汽车两种自卸机构的应用特点比较如下。
两种机构的运动性质相同,均可依靠液压传动系统提供的动力来完成汽车自卸工作。
FX2N-1PG模块性能参数
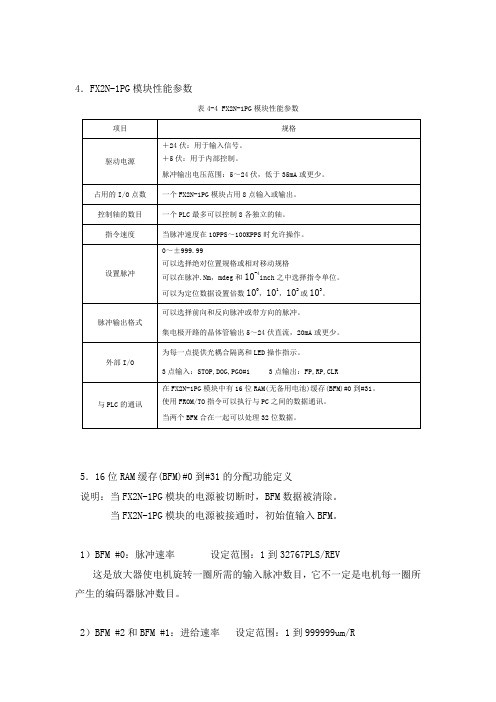
4.FX2N-1PG模块性能参数表4-4 FX2N-1PG模块性能参数5.16位RAM缓存(BFM)#0到#31的分配功能定义说明:当FX2N-1PG模块的电源被切断时,BFM数据被清除。
当FX2N-1PG模块的电源被接通时,初始值输入BFM。
1)BFM #0:脉冲速率设定范围:1到32767PLS/REV这是放大器使电机旋转一圈所需的输入脉冲数目,它不一定是电机每一圈所产生的编码器脉冲数目。
2)BFM #2和BFM #1:进给速率设定范围:1到999999um/R这是电机旋转一圈的机器移动量。
3)BFM #3:参数设定。
① b0到b1的内容设定含义如下② b3到b2的内容无意义。
③ b5到b4的内容设定含义如下举例:当设置的位置(BFM#18和#17)的值是356并且BFM#3(b5,b4)是(1,1)时,实际位置(或移动距离)如下:对于电机系统单位有 356×103=356000(脉冲)对于机器系统和复合系统单位有 356×103=356000(um,mdeg, 10-4inch)=356(mm,deg, 10-1inch)④ b7到b6的内容无意义。
⑤ b8的内容决定脉冲输出的格式。
FX2N-1PG模块的脉冲输出端子FP和RP根据b8的设置(0或1)发生如下改变:当b8=0时,前向脉冲(FP)和反向脉冲(RP)波形如下:⑥ b9的内容决定旋转方向当b9=0时,每有一个前向脉冲(FP),当前位置(CP)值就增加一次。
当b9=1时,每有一个前向脉冲(FP),当前位置(CP)值就减少一次。
该位用于初始设置,在每个实际操作中,不需要改变旋转方向。
⑦ b10的内容决定原点返回方向,b11的内容无意义。
当b10=0时,在返回原点的过程中当前位置(CP)值减少。
当b10=1时,在返回原点的过程中当前位置(CP)值增加。
⑧ b12的内容决定DOG输入的极性,b13的内容决定计数开始定时。
FX2N-1PG-E BFM设置

伺服驱动器端子:
FX2N-1PG-E端子:
缓冲器设置:
BFM设置
BFM 项目设置值注意事项#0 脉冲数率
#2,#1 进给数率
#3 参数
b1,b0 系统单元b1=0,b0=0 以脉冲为单位
b5,b4 定位数据倍数b5=1,b4=0 倍数为100倍(102)b8 脉冲输出格式0 正反脉冲
b9 旋转方向0 当前值增大
b10 原位返回方向0 当前值减少
b12 DOG输入极性0
b13 计数开始点0
b14 STOP输入极性0
b15 STOP输入模式 1 不执行剩余距离
#5,#4 最大速度20000 Hz #6 偏置速度0
#8,#7 JOG速度5000 Hz #10,#9 原点返回速度(高速)
#11 原点返回速度(爬行速度)
#12 原点返回的0点点信号数目
#14,#13 原点位位置
#15 加速/减速时间500 ms #16
#18,#17 设置位置(Ⅰ)PLS #20,#19 运行速度(Ⅰ)
#22,#21 设置位置(Ⅱ)#24,#23 运行速度(Ⅱ)
#25 操作命令K4M0 b0 错误复位M0
b1 STOP M1
b2 前向脉冲停止M2
b3 反向脉冲停止M3
b4 JOG+M4
b5 JOG-M5
b6 原点返回开始M6
b7 相对/绝对位置M7
b8 单速定位开始M8
b9-b
15
#27,#26 当前位置#28 状态
#29 错误代码#30 型号代码#31。
FX2N配置和接线经典实例

∙FX2N系统配置和外部连接实例详解∙叙述FX2N系列PLC的型号含义;掌握FX2N系列PLC的编址方法;会正确连接FX2N 系列PLC的外部装置。
本文给出了FX2N系统配置和外部连接实例。
三菱PLC有F1与F2系列小型机,FX系列与FX2系列整体式高功能小型机,A系列、QnA系列、Q系列大中型机等,其中FX2N系列则是FX系列中功能最强、速度最高的微型可编程序控制器之一。
一、FX2N系统配置1. FX2N基本构成1)FX2N型号标注FX2N系列PLC型号标注型式为:FX2N- ?? ? ? - ?①②③④①表示输入输出总点数;②表示单元类型(M—基本单元、E—输入输出混合扩展单元与扩展模块、EX—输入专用扩展模块、EY—输出专用扩展模块);③表示输出形式(R—继电器输出、T—晶体管输出、S—双向晶闸管输出)④表示特殊品种的区别,见表1。
例如型号为FX2N- 48MR- D的PLC属于FX2N系列,有48个I/O点的基本单元,继电器输出型,使用DC24V电源。
2)FX2N基本单元FX2N系列基本单元按输入输出点数有16点、32点、48点、64点、80点与128点,用户存储器容量可扩展到16k步,FX2N各基本单元规格见表2。
图1是FX2N-64MR基本单元外形,基本单元由内部电源、内部CPU、内部输入输出接口及程序存储器(RAM)组成,其中动作指示灯1有5个,分别为POWER—电源指示灯、RUN—运行指示灯、BATT.V—电池电压下降指示灯、PROG-E—程序出错指示闪烁灯及C PU-E—CPU出错指示亮灯。
图1 FX2N-64MR基本单元外形图1-动作指示灯2-DIN导轨装卸卡子3-输出动作指示灯4-输出用装卸式端子5-外围设备接线插座盖板6-面板盖7-电源、辅助电源、输入信号用装卸式端子8-输入指示灯9-安装孔(4 - f4.5) 10-扩展设备接线插座板2. FX2N扩展配置1)FX2N扩展单元FX2N系列还具有较为灵活的I/O扩展功能,其中扩展单元由内部电源及内部输入输出接口组成,FX2N系列扩展单元见表3。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
伺服驱动器端子:
FX2N-1PG-E端子:
缓冲器设置:
BFM设置
BFM 项目设置值注意事项#0 脉冲数率
#2,#1 进给数率
#3 参数
b1,b0 系统单元b1=0,b0=0 以脉冲为单位
b5,b4 定位数据倍数b5=1,b4=0 倍数为100倍(102)b8 脉冲输出格式0 正反脉冲
b9 旋转方向0 当前值增大
b10 原位返回方向0 当前值减少
b12 DOG输入极性0
b13 计数开始点0
b14 STOP输入极性0
b15 STOP输入模式 1 不执行剩余距离
#5,#4 最大速度20000 Hz #6 偏置速度0
#8,#7 JOG速度5000 Hz #10,#9 原点返回速度(高速)
#11 原点返回速度(爬行速度)
#12 原点返回的0点点信号数目
#14,#13 原点位位置
#15 加速/减速时间500 ms #16
#18,#17 设置位置(Ⅰ)PLS #20,#19 运行速度(Ⅰ)
#22,#21 设置位置(Ⅱ)#24,#23 运行速度(Ⅱ)
#25 操作命令K4M0 b0 错误复位M0
b1 STOP M1
b2 前向脉冲停止M2
b3 反向脉冲停止M3
b4 JOG+M4
b5 JOG-M5
b6 原点返回开始M6
b7 相对/绝对位置M7
b8 单速定位开始M8
b9-b
15
#27,#26 当前位置#28 状态
#29 错误代码#30 型号代码#31。