汽车直线制动仿真计算与优化
制动系统的优化设计与仿真分析
制动系统的优化设计与仿真分析随着汽车工业的发展,制动系统的设计和制造技术也在不断进步。
制动系统是汽车行驶过程中最关键的安全系统之一,能够在紧急情况下尽快将车辆停止,保障车辆和行人的安全。
因此,制动系统的优化设计和仿真分析对于汽车行业至关重要。
一、制动系统的构成制动系统主要由制动器、制动盘/鼓、制动液、制动管路、制动泵等几个部分组成。
其中,制动器可以分为基本制动器和辅助制动器两类。
基本制动器主要包括气压制动器、液压制动器和机械制动器等。
其工作原理是通过施加制动力使车轮停止旋转,从而阻止汽车运动。
辅助制动器则是指制动制动器处理无法满足制动要求时所使用的辅助装置。
主要包括泊车制动器和驻车制动器等。
制动盘/鼓是制动系统主要能量转换的地方,它将制动液通过制动器送到刹车片与制动盘接触的位置,转化为制动力。
制动管路是用于传输制动液的管道,而制动泵则是产生并提供制动液压力的终端设备。
二、制动系统的优化设计在实际的汽车制动系统应用中,制动系统需要满足多种复杂的要求。
如何实现较好的制动性能和较低的成本是设计者需要解决的首要问题。
因此,下面分别从黏着力、稳定性和制动力三个方面探讨制动系统的优化设计。
1.黏着力在制动系统中,刹车片和制动盘必须要有良好的黏着力才能实现高效的制动效果。
所谓黏着力,指的是刹车片表面和制动器内壁之间的摩擦力,它决定了汽车能够在多大范围内停止。
优化黏着力的方法主要有以下几个方面:(1)选择合适的材料。
选择合适的刹车片材料可以改善制动器与制动盘之间的黏着力,从而提高制动性能。
目前主流的刹车片材料有金属、有机和陶瓷等,不同材料的优缺点也不同。
(2)改善制动盘表面。
制动盘表面会因为使用而损耗,会影响刹车片与制动盘之间的黏着力。
对制动盘进行适当的处理或涂层处理可以改善黏着性能。
(3)优化刹车片结构。
刹车片的厚度和面积也会影响制动性能。
适当增加刹车片的面积或者采用具有弹性可调的刹车片结构可以增强黏着性能。
汽车刹车系统动力学仿真优化研究
汽车刹车系统动力学仿真优化研究现代汽车是人们生活中必不可少的交通工具之一,其各种部件的性能直接关系到行车的安全性。
其中,刹车系统对于汽车的行车安全显得尤为重要。
而在刹车系统的正常工作中,其动力学参数也直接影响着整个汽车的刹车效果。
因此,对于刹车系统的动力学参数进行优化具有非常重要的意义。
冷凝催化技术是一种常见的刹车系统控制方法,它不仅具有良好的净化效果,还可以大大降低系统中有毒有害气体的排放。
然而,该技术虽然在净化空气中的污染物方面表现出色,但同时会产生一定程度的温度上升,从而影响刹车片的使用寿命和刹车效果。
因此,在对冷凝催化技术进行控制时,需要对刹车系统的动力学参数进行详细的分析和优化设计。
对于刹车系统的动力学参数进行仿真优化研究,不仅可以更好地掌握刹车系统的工作原理,还可以为进一步的应用提供科学的理论基础。
在进行刹车系统的动力学仿真研究时,需要对刹车系数等一系列参数进行详细的模拟运算。
通过建立刹车系统的工作模型,可以更好地理解刹车系统的工作原理,从而为进一步的研究提供重要支持。
在进行刹车系统的动力学仿真研究时,需要详细了解刹车片的材质和结构等参数。
此外,还需要考虑到车辆金属部件在高温环境下的膨胀问题,以及刹车片热扩散的效应等因素。
在进行模拟运算时,需要注意刹车系统的非线性动态特性,以及在刹车过程中的脉冲扰动等问题。
为了更好地进行刹车系统的动力学仿真研究,可以采用Caliper软件进行模拟运算。
该软件具有较强的仿真能力和模型优化功能,可以实现对刹车系统动力学模型的建模和优化分析。
在进行仿真研究时,首先需要对车辆行驶速度、刹车压力、刹车片材质和结构等参数进行详细的输入,然后进行仿真计算和模型优化设计。
在实际行车过程中,刹车系统的刹车力度和刹车力持续时间都是影响刹车效果的重要因素。
因此,在进行刹车系统的动力学仿真研究时,需要特别考虑这些因素。
同时,为了更好地控制刹车系统的动力学参数,可以采用模型预测控制方法,实现对刹车系统的精确控制。
乘用车制动感觉仿真分析与优化研究

MANUFACTURING AND PROCESS I卸造与工艺乘用车制动感觉仿真分析与优化研究张涵1徐伟21.上汽通用五菱汽车股份有限公司广西柳州市5450072.武汉理工大学机电学院湖北省武汉市430070摘要:针对乘用车的制动感觉在车辆制动性能中愈发备受重视,本文对汽车制动中制动系统所需制动液总体积和制动踏板行程进行了分析,提出建立制动踏板感觉的仿真模型来分析乘用车制动踏板感觉。
分别对制动器、制 动软管、制动主缸进行了模型建立,得到制动踏板位移、制动减速度和制动踏板力的关系曲线。
并针对某款车型的制动系统进行了制动感觉试验来验证模型的合理性,同时对其制动感觉进行了优化与优化结果验证。
结果表明,制动踏板感觉仿真模型切合实际,增大前制动轮缸缸径、前有效制动半径和后有效制动半径可以减小制动踏板力,并达到优化制动感觉的效果。
关键词:制动感觉;仿真模型;制动踏板力;制动踏板位移1引言据中国汽车工业协会统计,2017年全年 乘用车销量约为2420.91辆,稳居全球第一。
伴随着汽车行业的蓬勃发展,消费者对车辆 安全性中的制动性能也更加重视,而其中制 动感觉尤为如此。
根据JD Pow-e r的反馈,对汽车制动感觉方面反映最多的问题主要有 制动不够力、制动偏软、刹车不够灵敏等[1]。
因而对汽车制动感觉的研究是提高乘用车的 制动性能的一个重要方向。
侯俊、过学迅应用UG对盘式制动器进 行建模,并用ANSYS软件对制动器总成有限元模型进行了有限元分析'孟建德、张立军和余卓平等开发构建了乘用车制动踏板感 觉试验台架来研究关健因素对制动踏板感觉 的影响[3]。
国外对制动感觉研究则较为成熟,Rena、Paul等通过对制动卡钳内的制动块的 材料进行研究,通过理论和实验证明了制动 块的材料确实能够在一定程度上对乘用车的 制动感觉产生影响[4]。
David、M ark等人通 过对制动系统中的制动软管进行了研究,发 现制动软管的膨胀量会引起制动液的体积增 加,从而会对乘用车的制动感觉产生影响[5]。
汽车性能仿真计算实验实验报告

汽车性能仿真计算实验实验报告实验⼀汽车动⼒性仿真计算实验⽬的1.掌握汽车动⼒性评价指标和评价⽅法2.学会使⽤matlab 对汽车动⼒性指标进⾏计算实验内容1.学习汽车动⼒性理论2.编写计算程序3.绘制汽车动⼒性图形实验设备硬件环境:汽车虚拟仿真实验室软件环境:matlab2016a 及以上版本实验步骤1.学习汽车动⼒性理论2.编写计算程序3.绘制汽车动⼒性图形实验报告1. 运⽤matlab 解决《汽车理论》第⼀章习题1.31)绘制汽车驱动⼒与⾏驶阻⼒平衡图汽车驱动⼒Ft=ri i T to g tq η⾏驶阻⼒F f +F w +F i +F j =G ?f +2D 21.12A C a u +G ?i+dt dum δ发动机转速与汽车⾏驶速度之间的关系式为:0g i nr 0.377ua i ?= 由本题的已知条件,即可求得汽车驱动⼒和⾏驶阻⼒与车速的关系,编程即可得到汽车驱动⼒与⾏驶阻⼒平衡图。
2)求汽车最⾼车速,最⼤爬坡度及克服该坡度时相应的附着率①由1)得驱动⼒与⾏驶阻⼒平衡图,汽车的最⾼车速出现在5档时汽车的驱动⼒曲线与⾏驶阻⼒曲线的交点处,Ua max =99.08m/s 2。
②汽车的爬坡能⼒,指汽车在良好路⾯上克服w f F F +后的余⼒全部⽤来(等速)克服坡度阻⼒时能爬上的坡度,此时0=dt du,因此有()w f t i F F F F +-=,可得到汽车爬坡度与车速的关系式:()+-=G F F F i w f t arcsin tan ;⽽汽车最⼤爬坡度为Ⅰ档时的最⼤爬坡度。
利⽤MATLAB 计算可得,352.0max =i 。
③如是前轮驱动,1?C =qb hg q L L -;相应的附着率1?C 为1.20,不合理,舍去。
如是后轮驱动,2?C =qa hg q L L+;相应的附着率2?C 为0.50。
3)绘制汽车⾏驶加速度倒数曲线,求加速时间利⽤MATLAB 画出汽车的⾏驶加速度图和汽车的加速度倒数曲线图:忽略原地起步时的离合器打滑过程,假设在初时刻时,汽车已具有Ⅱ档的最低车速。
关于汽车制动系统性能分析及优化设计探讨

MANUFACTURING AND PROCESS | 制造与工艺关于汽车制动系统性能分析及优化设计探讨郝孟军 梅容芳 宫涛 刘福华 刘良 周彬宜宾职业技术学院 四川省宜宾市 644003摘 要: 我国汽车产业发展的速度在不断的加快,同时得到了我国有关部门的重视,在这种情况下,汽车产业的安全问题也是人们非常重视的问题。
在汽车的安全系统中,汽车制动系统是非常关键的作用。
汽车制动系统的主要作用是要确保车辆在进行制动的过程中有比较稳定的减速过程。
本文对汽车制动系统的性能进行了深入的分析,并提出相应的优化设计。
关键词:汽车制动系统 性能分析 优化设计1 引言汽车制动系统的作用主要是在制动时对车辆进行可靠的减速,同时确保车辆在制动过程中不受地面坡度的干扰,使车辆能够平稳地行驶。
汽车制动系统中最常见的制动方法是电子制动以及气动动力制动。
在本文中,主要分析汽车的制动系统工作原理,分析了制动系统的主要功能,并提出了相应的优化设计。
2 汽车制动系统的主要工作原理2.1 电子制动系统的工作原理一般来说,汽车的电子制动系统的原理主要包括以下几点:如果车辆在进行行驶时,需要进行紧急制动,驾驶员需要用力通过制动踏板进行制动信号的发送,信号经三环调速系统有效调节后通过机电制动系统,同时,确保直流无刷力矩发动机直接接收输出铠装的电压,然后运用旋转发动机轴把需要输出的转速信号传输到传动机构中,通过减速以及扭矩把转速信号转换成螺杆的位移,在这个制动过程中,汽车机电制动系统的工作过程是非常速度的,只有0.1s。
2.2 汽车气动制动系统的工作原理目前,许多车辆主要采用气动制动系统。
为了更好的提升气压制动系统的安全性,应总结和分析气压制动系统的工作原理和特点,提升气制动系统的工作效率。
当驾驶员安全驾驶时,汽车空气制动系统不使用汽车空气制动系统。
在此过程中,车辆的气动制动系统是处于待机的状态,气动制动系统的气动阀和快速释放阀完全失效,车辆气动制动系统的前后制动气室与室外空气的气压是处于相同的状态,但气室没有与储气罐中的压缩空气进行有效地连接,当车辆遇到紧急的情况时,需要进行紧急制动,司机需要做好车辆气动制动系统的制动阀,能够及时的踩下车辆的制动踏板。
汽车制动系统的设计及仿真
汽车制动系统的设计及仿真任务书1.设计的主要任务及目标汽车制动器是制动系中最重要的一个部件,是制动系统中用以产生阻碍汽车运动或运动趋势的力的部件。
凡是利用固定元件与旋转元件工作表面的摩擦而产生制动力矩的制动器都成为摩擦制动器。
摩擦制动器可分为鼓式和盘式两大类。
前者的摩擦副中的旋转元件为制动鼓,其工作表面为圆柱面;后者的旋转元件则为圆盘状的制动盘,以端面为工作表面。
2.设计的基本要求和内容(1)了解汽车制动系统的工作过程。
(2)熟悉汽车制动系统的设计过程和设计参数。
(3)结合汽车制动性能要求设计汽车制动器。
(4)结合三维建模软件,并实现制动器的运动仿真。
3.主要参考文献[1] 王望予.汽车设计[M].北京:机械工业出版社,2004[2] 余志生.汽车理论[M].北京:机械工业出版社,2003[3] 陈家瑞.汽车构造[M].北京:机械工业出版社,2003[4] 林秉华.最新汽车设计实用手册[M],黑龙江:黑龙江出版社,2005[5] 张尉林.汽车制动系统的分析与设计[M].北京:机械工业出社,20024.进度安排注:一式4份,系部、指导教师各1份、学生2份:[毕业设计]及答辩评分表各一份汽车制动系统的设计及仿真摘要:汽车的制动系是汽车行车安全的保证,许多制动法规对制动系提出了许多详细而具体的要求,这是我们设计的出发点。
从制动器的功用及设计的要求出发,依据给定的设计参数,进行了方案论证。
对各种形式的制动器的优缺点进行了比较后,选择了浮动钳盘的形式。
这样,制动系有较高的制动效能和较高的效能因素稳定性。
随后,对盘式制动器的具体结构的设计过程进行了详尽的阐述。
选择了简单液压驱动机构和双管路系统,选用了间隙自动调节装置。
在设计计算部分,选择了几个结构参数,计算了制动系的主要参数,盘式制动器相关零件的设计计算。
关键词: 制动器,同步附着系数,制动盘,制动钳Automobile brake system design and simulationAbstracts:The braking system in a vehicle guaranteed the safety of driving .Many rules and regulations have been made for the braking system in detail, which is the starting of our design.Firstly, I demonstrate the project on the base of the function of the brake, And analysis their strong point and shortcomings .I choose the form of front-disked. In this way, the braking system have higher braking efficiency and high stability of the performance factors. Subsequently, the specific structure of the disc brake design was elaborated in detail.I designed the hydraulic drive system and two-pipe system and selected clearance automatic adjusting device.In the calculate part .I chosen several structural parameters, calculated the main parameters of the braking system drive mechanism.Key words:disc brakes,synchronous attachment coefficient,brake disc,brake caliper目录1 绪论 (1)1.1 课题研究的目的及意义 (1)1.2制动系统研究现状 (1)1.3课题设计思路 (3)2制动系统概述 (4)2.1制动系的类型 (4)2.2汽车制动系统组成 (4)2.3 制动器的组成 (5)2.4 制动器的要求 (5)2.5 制动器的种类 (7)3 汽车参数计算 (14)3.1汽车的基本参数 (14)3.2 制动系的主要参数及其选择 (15)3.3 盘式制动器的结构参数与摩擦系数的确定 (16)3.4 制动衬块的设计计算 (18)3.5 摩擦衬块磨损特性的计算 (19)4 制动器主要零件的结构设计 (21)4.2 制动钳 (21)4.4 摩擦材料 (21)4.5 盘式制动器间隙的调整方法及相应机构 (22)4.6 制动驱动机构的结构型式选择与设计计算 (22)结论 (25)参考文献 (26)致谢 (27)附录 (28)1 绪论1.1 课题研究的目的及意义汽车的设计与生产涉及到许多领域,其独有的安全性、经济性、舒适性等众多指标,也对设计提出了更高的要求。
轿车制动性能仿真分析与计算

进行轿车制动性能的仿真分析和计算通常涉及以下步骤和考虑因素:
步骤一:建立轿车制动系统模型
1. 车辆参数收集:收集轿车相关参数,如质量、车轮半径、制动器类型等。
2. 制动系统建模:建立轿车制动系统的数学模型,包括制动盘、刹车片、制动液、制动缸等组成部分。
步骤二:制动力计算
1. 制动力分析:根据制动器和车速等参数计算制动力的大小。
2. 摩擦系数考虑:考虑轮胎与地面的摩擦系数,影响制动力的传递效果。
步骤三:制动距离仿真
1. 刹车距离计算:利用制动力和车辆动力学方程计算制动过程中的制动距离。
2. 不同情况考虑:考虑干燥、潮湿、结冰路面等不同路况对制动距离的影响。
步骤四:热力学分析
1. 制动系统热平衡:考虑制动过程中制动系统的热平衡问题,防止制动器过热失效。
2. 材料特性影响:考虑制动盘和刹车片材料的热特性对制动性能的影响。
步骤五:模拟验证与优化
1. 仿真验证:运用仿真软件(如ADAMS、Simulink等)进行制动性能的仿真验证。
2. 性能优化:根据仿真结果对制动系统进行优化设计,提高制动性能。
以上步骤涉及到多个领域的知识,包括车辆动力学、制动系统设计、热力学等。
在实际工程中,通常需要借助专业的仿真软件和工程计算工具来进行轿车制动性能的分析与计算。
基于Modelica的电动汽车制动系统建模仿真与参数优化

基于Modelica的电动汽车制动系统建模仿真与参数优化随着社会的发展,电动汽车已经成为一个必然趋势,并且成为了解决环境问题的重要手段。
然而,电动汽车的制动系统与传统汽车的制动系统有很大的不同,需要重新对制动系统进行建模和优化。
基于Modelica语言,我们可以建立一个电动汽车的制动系统模型,并对其进行仿真和优化。
在这个模型中,我们把制动系统分成了三个部分,即制动器、电机和控制器。
制动器部分使用Modelica.Mechanics.Rotational子库中的元件进行建模。
我们把制动器建模成了一个摩擦片和转子的组合体。
当制动器处于制动状态时,摩擦片会和转子发生摩擦,从而减速汽车。
电机部分主要建模电机的动力学特性,使用Modelica.Electrical.Machines库进行建模。
我们采用了一个直流电机,并根据电机参数建立动力学模型,包括转矩-转速曲线等。
在制动时,电机接通再反向运转,产生负功率,从而带动轮胎减速。
控制器部分主要控制制动系统的动作,采用了Modelica.Blocks中的元件进行建模。
控制器部分的主要功能是根据汽车速度和制动踏板的行程,计算制动器的力矩,从而控制汽车制动。
在建立完毕制动系统的模型之后,我们可以使用仿真软件对制动系统进行仿真测试。
通过仿真测试,我们可以观测到制动系统是否能够正常运作,并且可以得到控制参数的优化方案。
我们可以通过调整控制器部分的参数来达到最佳制动效果。
例如,通过改变制动器的力矩大小,我们可以调整制动系统的制动能力。
如果力矩太小,制动效果不佳;如果力矩太大,会导致轮胎打滑。
因此,我们需要进行参数优化,以达到最佳制动效果。
在最终的仿真测试结果中,我们得到了一个能够良好运作的电动汽车制动系统模型,该模型的制动系统具有良好的稳定性和可靠性,并能够通过控制器的参数优化实现最佳制动效果。
基于Modelica的电动汽车制动系统建模仿真与参数优化可以帮助我们更好地了解电动汽车的特性,并且优化它们的制动性能。
基于Modelica的电动汽车制动系统建模仿真与参数优化

modeling language—Modelica is established.A testing method based on VBOX一3i data logger is proposed.The simulation results agree with the test results and the accuracy of the m odel is verif ied.Based on the m odel,the parameters of vacuum assist brake system are optimized by orthogonal experiment method. The optimized parameters can reduce energ y consumption of the vacuum assist brake system by approx.14.2%.
【摘要 】基于多领域统一建模语言 Modelica建立 了电动汽车整车模 型及真空助力制动系统模型,提出了基于车辆数据 采 集 系统 VBOX一3i的 测试 方 法 ,并 通 过对 电动 中 巴车 的 实车 路 况测 试 验 证 了仿 真模 型 的 准确 性 。在 此 基础 上 ,利 用 正交 试
基金项 目:F-东省 战略性新兴产业核 心技术攻关项 目(编号 :2011A010802003)、东莞 市重大科技专项 (编号 :2011215155)。
2016 ̄ 第2期
一33—
不同车速下汽车的制动性能仿真分析

1制动距离仿真分析制动距离是指汽车在一定的初速度下,从驾驶员急踩制动踏板开始,到汽车完全停住为止所驶过的距离,它是重要的衡量汽车制动性能的指标之一。
汽车制动距离主要受车速和制动力大小的影响,一旦车轮发生了制动抱死,轮胎与地面之间的附着系数将比其间的峰值附着系数有所减小,从而增加制动距离,而制动距离过大,很容易导致各类交通事故。
有资料显示,每增加0.1m 的制动距离,交通事故的发生率就会大大提高,而交通事故的发生率又和车速存在直接关系。
基于此,本文十分有必要对车速与制动距离之间的关系开展研究。
本文是对装有ABS 汽车在基于逻辑门限值,PID 和模糊控制三种不同控制算法的车速与制动距离的关系研究。
图1-图6给出了在初始速度60km/h 、80km/h 和100km/h 下,三种不同控制算法的制动距离和制动时间变化曲线。
由图1-图6可以得出在初始速度60km/h 、80km/h 和100km/h 下,基于逻辑门限值控制算法,PID 控制算法和模糊控制算法的制动距离和制动时间数值。
归纳为表1。
由表1可以得出:①在相同控制算法情况下,车速对制动距离和制动时间存在较大影响。
比如,基于门限值控制算法控制下,车速为60km/h 时,制动时间为1.75s ,车速为80km/h 时为2.22s ,较车速为60km/h 增加了0.47s ,车速为100km/h 时为2.18s ,较车速为60km/h 增加了0.955s 。
在制动距离上,车速为60km/h 时,制动距离为16.28m ,车速为80km/h 时,制动距离为为27.23m ,较车速为60km/h 增加了10.95m ,车速为100km/h 时为39.84m ,较车速为60km/h 增加了近一倍,增加了15.20m 。
由此可见,制动距离增加速率远远大于车速的增加速率。
更能充分说明了,即使装有ABS 的汽车,在高速行驶时,也是非常危险的。
②在相同初始车速的情况下,基于门限值控制的制动时间和制动距离相比PID 控制和模糊控制都最大。
汽车制动系统的设计及仿真
汽车制动系统的设计及仿真任务书1.设计的主要任务及目标汽车制动器是制动系中最重要的一个部件,是制动系统中用以产生阻碍汽车运动或运动趋势的力的部件。
凡是利用固定元件与旋转元件工作表面的摩擦而产生制动力矩的制动器都成为摩擦制动器。
摩擦制动器可分为鼓式和盘式两大类。
前者的摩擦副中的旋转元件为制动鼓,其工作表面为圆柱面;后者的旋转元件则为圆盘状的制动盘,以端面为工作表面。
2.设计的基本要求和内容(1)了解汽车制动系统的工作过程。
(2)熟悉汽车制动系统的设计过程和设计参数。
(3)结合汽车制动性能要求设计汽车制动器。
(4)结合三维建模软件,并实现制动器的运动仿真。
3.主要参考文献[1] 王望予.汽车设计[M].北京:机械工业出版社,2004[2] 余志生.汽车理论[M].北京:机械工业出版社,2003[3] 陈家瑞.汽车构造[M].北京:机械工业出版社,2003[4] 林秉华.最新汽车设计实用手册[M],黑龙江:黑龙江出版社,2005[5] 张尉林.汽车制动系统的分析与设计[M].北京:机械工业出社,20024.进度安排注:一式4份,系部、指导教师各1份、学生2份:[毕业设计]及答辩评分表各一份汽车制动系统的设计及仿真摘要:汽车的制动系是汽车行车安全的保证,许多制动法规对制动系提出了许多详细而具体的要求,这是我们设计的出发点。
从制动器的功用及设计的要求出发,依据给定的设计参数,进行了方案论证。
对各种形式的制动器的优缺点进行了比较后,选择了浮动钳盘的形式。
这样,制动系有较高的制动效能和较高的效能因素稳定性。
随后,对盘式制动器的具体结构的设计过程进行了详尽的阐述。
选择了简单液压驱动机构和双管路系统,选用了间隙自动调节装置。
在设计计算部分,选择了几个结构参数,计算了制动系的主要参数,盘式制动器相关零件的设计计算。
关键词: 制动器,同步附着系数,制动盘,制动钳Automobile brake system design and simulationAbstracts:The braking system in a vehicle guaranteed the safety of driving .Many rules and regulations have been made for the braking system in detail, which is the starting of our design.Firstly, I demonstrate the project on the base of the function of the brake, And analysis their strong point and shortcomings .I choose the form of front-disked. In this way, the braking system have higher braking efficiency and high stability of the performance factors. Subsequently, the specific structure of the disc brake design was elaborated in detail.I designed the hydraulic drive system and two-pipe system and selected clearance automatic adjusting device.In the calculate part .I chosen several structural parameters, calculated the main parameters of the braking system drive mechanism.Key words:disc brakes,synchronous attachment coefficient,brake disc,brake caliper目录1 绪论 (1)1.1 课题研究的目的及意义 (1)1.2制动系统研究现状 (1)1.3课题设计思路 (3)2制动系统概述 (4)2.1制动系的类型 (4)2.2汽车制动系统组成 (4)2.3 制动器的组成 (5)2.4 制动器的要求 (5)2.5 制动器的种类 (7)3 汽车参数计算 (14)3.1汽车的基本参数 (14)3.2 制动系的主要参数及其选择 (15)3.3 盘式制动器的结构参数与摩擦系数的确定 (16)3.4 制动衬块的设计计算 (18)3.5 摩擦衬块磨损特性的计算 (19)4 制动器主要零件的结构设计 (21)4.2 制动钳 (21)4.4 摩擦材料 (21)4.5 盘式制动器间隙的调整方法及相应机构 (22)4.6 制动驱动机构的结构型式选择与设计计算 (22)结论 (25)参考文献 (26)致谢 (27)附录 (28)1 绪论1.1 课题研究的目的及意义汽车的设计与生产涉及到许多领域,其独有的安全性、经济性、舒适性等众多指标,也对设计提出了更高的要求。
新型汽车电子机械制动系统建模仿真和实验分析
新型汽车电子机械制动系统建模仿真和实验分析为了促进汽车制动性能的进一步提升,也就要求各汽车零部件商以及科研场所能够加强对电子机械制动系统的研究力度,并促使其制动性能得到不断的优化与完善,这样才能够充分满足汽车在运行过程中的各项制动要求,并使得汽车的运行安全性以及可靠性得以进一步的提升。
1 汽车电子机械制动系统的设计1.1 执行系统汽车机械制动系统多是通过制动模块、转动模块以及无刷直流电机模块三部分所构成的,而借助对数学模型的科学设计还能够在动力学的角度上实现对电机驱动模块的方针处理。
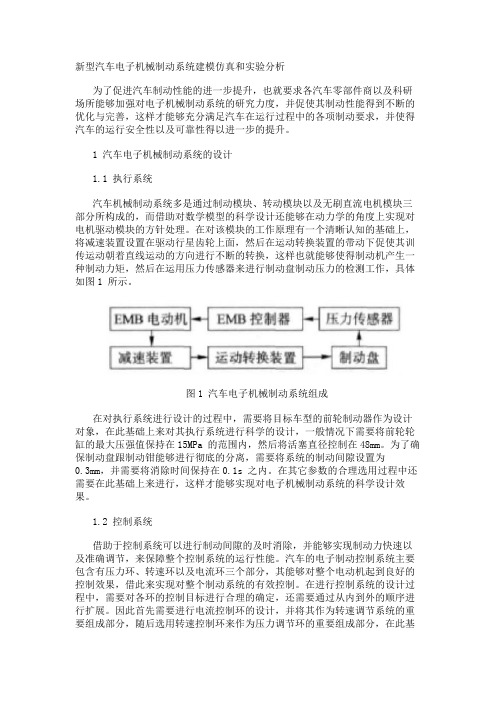
在对该模块的工作原理有一个清晰认知的基础上,将减速装置设置在驱动行星齿轮上面,然后在运动转换装置的带动下促使其训传运动朝着直线运动的方向进行不断的转换,这样也就能够使得制动机产生一种制动力矩,然后在运用压力传感器来进行制动盘制动压力的检测工作,具体如图1 所示。
图1 汽车电子机械制动系统组成在对执行系统进行设计的过程中,需要将目标车型的前轮制动器作为设计对象,在此基础上来对其执行系统进行科学的设计,一般情况下需要将前轮轮缸的最大压强值保持在15MPa 的范围内,然后将活塞直径控制在48mm。
为了确保制动盘跟制动钳能够进行彻底的分离,需要将系统的制动间隙设置为0.3mm,并需要将消除时间保持在0.1s 之内。
在其它参数的合理选用过程中还需要在此基础上来进行,这样才能够实现对电子机械制动系统的科学设计效果。
1.2 控制系统借助于控制系统可以进行制动间隙的及时消除,并能够实现制动力快速以及准确调节,来保障整个控制系统的运行性能。
汽车的电子制动控制系统主要包含有压力环、转速环以及电流环三个部分,其能够对整个电动机起到良好的控制效果,借此来实现对整个制动系统的有效控制。
在进行控制系统的设计过程中,需要对各环的控制目标进行合理的确定,还需要通过从内到外的顺序进行扩展。
因此首先需要进行电流控制环的设计,并将其作为转速调节系统的重要组成部分,随后选用转速控制环来作为压力调节环的重要组成部分,在此基础上获得良好的压力调节环设计效果,并要求制动压力的超调能够控制在5%以上,制动间隙消除时间控制在0.1s 以内。
基于仿真模拟的紧凑型轿车盘式制动器设计优化

基于仿真模拟的紧凑型轿车盘式制动器设计优化紧凑型轿车盘式制动器是现代汽车制动系统中常见的一种制动装置,它的设计和优化对车辆的安全性和性能至关重要。
本文将基于仿真模拟对紧凑型轿车盘式制动器进行设计优化,并探讨优化的具体方法和结果。
首先,对于紧凑型轿车盘式制动器的设计优化,我们需要考虑的主要目标是提高制动性能、减少制动器的重量和尺寸,并确保制动器的稳定性和耐用性。
在设计优化的过程中,我们可以利用仿真模拟软件进行虚拟测试和分析。
通过运用有限元分析方法,我们可以对盘式制动器的结构进行电磁、热力学和机械力学等方面的分析,从而模拟实际工作状态下的制动器性能。
首先,我们可以在仿真模拟软件中建立盘式制动器的三维模型,并进行材料力学性质的设定。
接下来,通过对制动器在不同工况下的仿真分析,我们可以评估盘式制动器的刹车效果和传热效果。
通过仿真模拟,我们可以优化盘式制动器的结构参数,如制动盘厚度、刹车片面积和刹车片摩擦系数等。
通过对这些参数的不同组合进行仿真测试,我们可以找到最佳的设计方案。
例如,在确保安全的前提下,可以通过减少制动盘厚度和增加刹车片面积来减轻制动器重量,从而提高整车的燃油经济性和操控性能。
此外,我们还可以利用仿真模拟软件进行传热分析,以确保盘式制动器在高温工况下的稳定性。
通过模拟制动片和制动盘之间的接触状态和传热过程,我们可以评估盘式制动器的散热性能,并根据需要进行结构优化。
例如,通过改善制动片和制动盘之间的导热性能,可以有效降低制动片的温度,减少制动器在长时间高速制动过程中的失效风险。
此外,为了保证盘式制动器在整个车辆寿命周期内的可靠性和耐久性,我们还可以利用仿真模拟软件进行结构强度分析。
通过模拟制动器在不同路况和负载下的受力状态,我们可以评估制动器的结构是否满足设计要求,并进行相应的优化。
例如,在保证结构刚度的前提下,可以通过优化材料的选择和分布来降低制动器的重量。
综上所述,基于仿真模拟的紧凑型轿车盘式制动器设计优化是一种高效而准确的方式。
乘用车制动设计及仿真

乘用车制动设计及仿真一、引言制动系统是汽车安全的核心组成部分之一。
乘用车制动系统不仅要满足对车辆的制动需求,同时要保证乘客和行人的安全。
本文将介绍乘用车制动设计的基本原理,并通过仿真分析验证制动系统的性能。
二、乘用车制动设计原理乘用车制动设计的目标是实现快速而稳定的制动效果。
制动系统的设计包括制动器、液压系统和控制系统三个方面。
2.1 制动器乘用车主要采用盘式制动器,包括刹车片、刹车盘和刹车钳。
制动器的设计应考虑以下几个因素:•刹车片材料:刹车片材料应具有良好的摩擦性能和耐磨性能,同时要考虑制动过程中的热膨胀和热衰减。
•刹车盘材料:刹车盘材料应具有良好的导热性能和耐热性能,以便快速散热,防止制动衰减。
•刹车钳设计:刹车钳应能够确保刹车片与刹车盘之间的紧密接触,避免制动时的失效。
•刹车片与刹车盘的接触面积:接触面积越大,制动效果越好,但也会增加制动器的负荷和成本。
2.2 液压系统液压制动系统通过液压力将制动力传递给刹车片和刹车盘。
液压系统的设计应考虑以下几个因素:•制动液的选择:制动液应具有高沸点和低压缩性,以保证制动时的稳定性和可靠性。
•主缸设计:主缸应能够通过踏板的力量产生足够的液压力,以便实现快速制动。
•助力器设计:助力器可以增加制动力,并减小制动力所需的踏板力量。
•刹车管路设计:刹车管路应保证液压力的传递和分配的稳定性,避免制动衰减。
2.3 控制系统控制系统主要包括制动控制单元(ECU)和制动系统的传感器。
制动控制单元接收传感器的信号,并根据车辆的速度、制动力和转向角等信息,控制制动系统的工作。
三、乘用车制动仿真制动仿真是评估和优化制动系统性能的重要方法。
通过仿真分析,可以预测制动系统的工作状态、制动力的分布和制动距离等参数,并优化设计方案。
制动仿真可以分为双端和单端仿真。
双端仿真是指通过在车辆和制动器之间建立模型,模拟制动系统的工作过程。
单端仿真是指通过在制动器上建立模型,模拟刹车片和刹车盘之间的接触状态和摩擦力。
汽车碰撞模拟仿真优化车辆制动系统的设计

汽车碰撞模拟仿真优化车辆制动系统的设计近年来,随着汽车行业的发展和人们对安全性能的关注度提高,汽车碰撞模拟仿真成为了车辆设计中不可或缺的环节。
在汽车碰撞模拟中,车辆制动系统的设计起着至关重要的作用。
本文将探讨汽车碰撞模拟仿真对车辆制动系统的要求,并提出优化车辆制动系统设计的方法。
1. 碰撞模拟要求对车辆制动系统的设计汽车碰撞模拟是通过计算机仿真的方式模拟真实碰撞情况,以评估车辆在碰撞时的各项性能指标。
这些性能指标包括碰撞速度、碰撞角度、碰撞形式等。
在碰撞模拟中,车辆制动系统的设计需要满足以下要求:(1) 制动力的合理调配车辆制动系统应具备合理的制动力调配能力,保证在碰撞时能够在不同轮胎上产生适当的制动力,以降低碰撞速度,减轻碰撞后的伤害。
(2) 制动系统的敏感性和稳定性车辆制动系统需要具备敏感的制动响应能力,以及良好的稳定性。
制动响应能力意味着车辆在碰撞之前能够快速反应并产生制动力,减少碰撞速度;稳定性则是指车辆在制动过程中能够保持良好的操控性和稳定性,从而降低碰撞后的二次碰撞。
(3) 制动系统的耐用性和可靠性车辆制动系统需要能够承受碰撞过程中的巨大冲击力,并保持稳定运行。
同时,制动系统还需要具备出色的可靠性,以确保在紧急情况下能够正常工作。
2. 优化车辆制动系统设计的方法对于汽车制动系统的设计,为了使其在碰撞模拟中能够满足要求,可以采取以下优化方法:(1) 制动系统压力的调整合理调整制动系统的压力分配,使得制动力能够在各个车轮上得到均衡分配。
这样,当发生碰撞时,制动力能够更加准确地作用于车轮,减少碰撞速度。
(2) 制动系统的敏感性优化通过改进设备和技术,提高制动系统的响应速度,使其能够更快地响应制动指令。
这样一来,在碰撞之前,制动系统能够更早地开始制动,降低碰撞速度。
(3) 制动系统材料的优化选择高强度、耐磨损的制动材料,提高制动系统在碰撞过程中的耐用性。
同时,可以采用防锁死刹车系统(ABS)等技术来提高制动系统的可靠性。
基于Matlab的汽车制动力分配比优化设计
基于Matlab的汽车制动力分配比优化设计汽车制动力分配比优化设计是汽车行业中极其重要的一项研究工作,它直接影响到车辆的行驶安全和驾驶体验。
Matlab是一款广泛应用于工程领域的数学软件,它能够提供完善的数学、统计和优化分析工具,适用于复杂的汽车制动力分析与设计。
在汽车制动力分配比优化设计中,Matlab可提供的工具有很多,如仿真分析、优化算法、流体动力学计算等。
通过Matlab的仿真分析工具,可以对不同制动力分配比方案进行建模仿真,从而评估其性能指标,如制动距离、制动力分布均匀度、制动力响应时间等。
同时,Matlab还可以利用一系列的优化算法,如遗传算法、模拟退火算法等,对不同方案的优化效果进行评估和比较。
此外,利用Matlab的流体动力学计算工具,可以对空气动力学参数进行优化计算,从而提升汽车制动性能。
汽车制动力分配比优化设计中还需要考虑到车辆悬挂系统、轮胎摩擦力等因素的影响。
Matlab可以提供车辆动力学模型的建立和模拟分析,从而实现多因素的优化设计。
此外,利用Matlab的机器学习工具,可以对大量的制动力数据进行处理和分析,从而提升汽车制动力分配比的优化预测精度。
通过不断地优化设计和仿真分析,可以使汽车的制动性能得到不断提升。
综上所述,Matlab是一款广泛应用于汽车制动力分配比优化设计中的数学软件,它可以提供完善的分析和优化工具,帮助工程师评估不同方案的性能和效果,从而优化汽车的制动性能,提高车辆行驶安全和驾驶体验。
汽车制动力分配比优化设计需要涉及到许多相关数据,如车辆重量、制动系统参数、轮胎规格、路面条件等。
下面对其中的几个数据进行分析。
首先,车辆重量是一个很重要的参数。
车辆重量越大,需要的制动力就越大,制动距离也越长。
因此,在制动力分配比的优化设计中,需要根据不同的车型和用途来选择合适的重量范围。
例如,在轿车的设计中,需要考虑到乘客数量和货物载重量等因素,从而选择合适的车身材料和结构设计,从而控制车辆重量。
汽车碰撞模拟仿真分析与车辆制动系统的协同优化

汽车碰撞模拟仿真分析与车辆制动系统的协同优化随着人们对于汽车安全性能的要求日益提高,碰撞模拟仿真分析和车辆制动系统的协同优化成为了汽车工程领域中的一个重要研究方向。
汽车碰撞模拟仿真可以通过计算机模拟车辆在碰撞过程中的动态响应,为汽车设计提供重要的参考依据。
而车辆制动系统作为车辆安全性能的关键组成部分,通过优化制动系统设计和参数配置,可以最大程度地提升汽车在碰撞中的安全性能。
1. 汽车碰撞模拟仿真分析汽车碰撞模拟仿真是通过借助计算机仿真软件,对汽车在碰撞中的动态响应进行模拟和分析。
通过在模型中引入真实的碰撞条件和车身结构,可以模拟出不同角度和速度下的碰撞情况,并计算出车辆的变形程度、受力情况等。
这些数据能够为汽车制造商提供重要的设计依据,以提升车辆在碰撞中的安全性能。
2. 车辆制动系统的重要性车辆制动系统是保证汽车行驶安全的重要组成部分。
它负责在行驶过程中将车辆快速减速或停下来,保证驾驶员能够有效控制车辆。
在碰撞事故中,一个可靠的制动系统对于减少碰撞冲击、保护乘客生命安全有着重要作用。
因此,车辆制动系统的设计和优化具有重要的意义。
3. 优化车辆制动系统设计与协同优化为了更好地提高车辆在碰撞中的安全性能,需要对车辆制动系统进行设计和优化。
在制动系统设计中,需要考虑刹车盘和刹车片的材料、制动液的选择、制动器的结构等。
同时,合理的制动系统参数配置也是提升车辆制动性能的关键。
通过模拟仿真和实验测试,可以对制动系统进行优化,以使制动系统具有更好的制动效果和稳定性,从而提高车辆在碰撞中的安全性能。
4. 优化策略与挑战在进行汽车碰撞模拟仿真和车辆制动系统的协同优化时,需要充分考虑碰撞条件、车辆结构、制动器性能等因素之间的相互关系。
同时,还需要解决汽车制动系统动力学模型的构建、参数优化和模拟结果验证等问题。
这些都是优化策略和挑战,需要进行深入的研究和探索。
5. 未来发展趋势随着计算机仿真技术的不断进步和汽车工程的发展,汽车碰撞模拟仿真和车辆制动系统的协同优化将成为汽车安全领域的重要研究方向。
汽车制动力分配比的优化设计与仿真计算

2 制动力分配比的确立
2. 1 制动力分配比初值
从 ( 5) 式的制动器的输出制动力F x , 可得出各 轴的制动力 F xF 与 F xR , 由此得到各轴制动力分配 比 Β 的初值为 Β=
F xF F xF + F xR
( 7)
2. 2 直线制动的最佳制动力分配
设汽车前轮刚要抱死或前后轮同时刚要抱死 du 的减速度为 = z g , 其中 z 为制动强度。 则 dt G du ( 8) F u 1 = F x b1 = Β = Β Gz g dt ( 4) 式, 分别得到前后轴的利用附着 联立 ( 3) 、 系数为 Υ f = Υ r =
收稿日期: 2004212217 作者简介: 王亚晴 (1981- ) , 女, 安徽巢湖人, 合肥工业大学硕士生; 张代胜 (1962- ) , 男, 安徽青阳人, 合肥工业大学教授, 硕士生导师.
1394
合肥工业大学学报 ( 自然科学版)
第 28 卷
1 汽车制动过程的受力分析
1. 1 整车计算模型
第 28 卷 第 11 期 2005 年 11 月
合肥 工 业 大 学 学 报
( 自然科学版)
JOU RNAL O F H EFE I U N I V ER S IT Y O F T ECHNOLO GY
Vol . 28 N o. 11 N ov. 2005
汽车制动力分配比的优化设计与仿真计算
( Schoo l of M ach inery and A u tom ob ile Eng ineering, H efei U n iversity of T echno logy, H efei 230009, Ch ina)
Abstract: A cco rd ing to the m echan ica l ana lysis of the veh icles d riving, the in it ia l va lue of b rak ing 2 fo rce d ist ribu t ion ra t io is a scerta ined, and the lim it equa t ion of the b rak ing 2fo rce d ist ribu t ion ra t io is g iven. T he influence of p a ram eter select ion of m a in elem en t s of the b rak ing system on the b rak ing p rop erty is d iscu ssed. A n op t im iza t ion design ing m ethod is p resen ted to get bet ter b rak ing p rop erty under d ifferen t w o rk ing frequencies w h ich co rrespond s w ith the cond it ion s tha t the veh icle is fu lly loaded o r em p ty. A n op t im izing design of a ligh t t ran spo rt veh icle is taken a s an exam p le and sim u la 2 t ive ca lcu la t ion is m ade a s the adhesion coefficien t is in a range of comm on road s. T h is study is help fu l to the b rak ing system design of veh icles. Key words: b rak ing fo rce d ist ribu t ion ra t io; op t im izing design; sim u la t ion; adhesive efficiency
桑塔纳2000轿车制动性能与仿真计算

桑塔纳2000轿车制动性能与仿真计算摘要本文首先对轿车制动系统进行了系统的理论分析,汽车制动性能是车辆安全行驶的重要保障,而汽车制动主要由三个方面来评价:制动效能、制动效能恒定性、制动时汽车方向的稳定性。
同过对汽车在平直路面上的制动进行力学分析,建立制动系统数学模型。
对桑塔纳2000轿车的制动力性能做研究,评价整车的制动力安全性,运用Visual C++对汽车的制动性能进行计算机仿真程序设计以及运用该程序对桑塔纳2000轿车的制动力分配,制动距离进行仿真计算。
程序着重于计算机仿真建模和图形结果的输出。
输出结果能够对汽车的制动性能进行有效评价,并对其进行优化设计,对汽车制动性能的计算机模拟仿真具有一定的参考作用,从而优化车辆的制动性能。
关键词:桑塔纳2000 制动性 Visual C++ 仿真Santana 2000 vehicle braking performance and SimulationABSTRACTThe first on the brake system of the system of theoretical analysis, The brake performance is the important guarantee of the traffic safety, and the brake of the automobile consists mainly in three ways to evaluate:brake efficiency, homeostasis of the brake efficiency , the stability of the braking car,s direction . By the analysis of the brake sexual mechanics we build mathematical model。
We research santana 2000,s performance of the power so that evaluate the system power security . Make use of visual C to design on the computer simulation program any distribute santana 2000 automobile, the performance of the brake The program concentrate on modeling and the results output。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
传统制动系统的建模及仿真优化1.1 汽车直线制动仿真计算理论基础汽车直线制动时,对两轮接地点分别取距(图1-1),可得地面法向反作用力为1()g z G b zh F L+=(1-1) 2()g z G a zh F L -= (1-2) 式中,j z g=,1z F 、2z F 分别为路面对前后车轮的法向作用力;G 为汽车重量;a 、b 分别为质心至前后轴的距离;j 为汽车减速度;g h 为汽车质心高度;L 为汽车的轴距。
汽车理论制动力分配关系为1(2)2r f gGb F F h =+ (1-3) 式中,r F 为汽车后轴制动力;f F 为汽车前轴制动力。
1.1.1 制动力分配比制动力分配比β为ff r F F F β=+ (1-4)1.1.2 直线制动的最佳制动力分配 设汽车前轮刚要抱死或者汽车前、后轮同时刚要抱死的减速度为du zg dt=,则 1u G du F Gz g dtββ== 式中,z 为制动强度。
根据汽车理论,可知前、后轴的利用附着系数为1()f g zb zh Lβϕ=+ (1-5)(1)1()r g z a zh L βϕ-=- (1-6) 前后轴的附着效率为f f gb LE h L ϕβ=- (1-7)(1)r r ga LE h L ϕβ=-+ (1-8)由于后轮先抱死容易发生后轴侧滑,是一种不稳定工况,故r f ψϕϕ≤≤,由式(1-5)和式(1-6)可以得出制动力分配比的极限关系为min min 1g g h h a b L Iz LIz ϕϕβϕϕ⎛⎫⎛⎫+-≤≤+ ⎪ ⎪⎝⎭⎝⎭ (1-9) 式中,min z 为整车应达到的最小制动强度。
利用不等式(1-9),可以确定0.2()0.8ϕ≤≤湿滑路面(干燥路面)的极限条件下,满载工况制动力分配比的允许范围。
1.2 优化设计1.2.1 设计变量将制动力分配比β作为设计变量,根据车辆制动系统设计经验可以取初值为00.4x =。
1.2.2 目标函数附着系数在制动强度(z=0.2~0.8)范围内,应尽可能接近防止车轮抱死需要的附着系数,此时地面的附着条件发挥得越充分,汽车轴间制动力分配越好。
在实际设计时,可以分别在满载与空载的利用附着系数与制动强度的差值平方和前乘以相应的权值。
所以,当制动强度z 在0.2~0.8范围变化时,根据汽车满载时前轴和后轴的实际附着系数,利用曲线与理想曲线间差值平方和为最小建立目标函数,即0.8220.2min ()()()f r z F z z βϕϕ=⎡⎤=-+-⎣⎦∑ (6-10)1.2.3 约束条件由于汽车在任何载荷情况下都要满足ECE 制动法规要求,根据ECE 制动法规和GB 12676—1999《汽车制动系统 结构、性能和试验方法》,对汽车制动力分配要求如下所述。
对于ϕ=0.2~0.8之间的各种车辆,要求制动强度为z ≥0.1+0.85(ϕ-0.2)当z>0.2时,有10.070.85f z c ϕ+⎛⎫=- ⎪⎝⎭当0.3<z<0.45时,有2(0.05)r c z ϕ=-+另外,要求前轴利用附着系数在后轴利用附着系数的上方,即3r f c ϕϕ=-制动力分配系数的范围为0.40.6β≤≤1.3 实例仿真分析早期的汽车配备的都是无调节装置的制动系统。
本文则是通过对早期货车的制动系统前后制动力分配进行优化。
货车的原始相关数据见表1-1。
表1-1 赛车的原始相关数据根据以上理论分析,在MATLAB 中编写以下程序进行优化设计。
先建立未优化前的主函数,进行求解计算并绘制制动力分配图,具体程序如下: clear allclcl=3.950;a=2.95;b=l-a;h=1.170;G=9290*9.8;z=0.2:0.1:0.8;beta=0.4;%前后制动力分配比fai0=(l*beta-b)/h;%同步附着系数faif=beta.*z.*l./(b+z.*h);%前轴利用附着系数fair=(1-beta).*z.*l./(a-z.*h);%后轴利用附着系数Ef=b./(1-beta-faif.*h);%前轴制动效率Er=a./(1-(1-beta)+fair.*h);%后轴制动效率f1=0.1:10:40000;f2=0.5*(G/h*sqrt(b^2+4*h*l*f1/G)-(G*b/h+2*f1));%I 曲线ff2=(1-beta)./beta.*f1;%实际制动力分配曲线plot(f1,f2,f1,ff2)%绘制制动力分配曲线图grid onfai=0.7;%路面附着系数v=80;%制动初速度am=fai0*9.8;%最大制动减速度计算s=v*(0.1+0.3/2)/3.6+v^2/(25.92*am);%制动距离计算fprintf('汽车最大制动力分配比beta=%3.3f \n',beta)fprintf('汽车最大减速度am=%3.2f m/s2 \n',am)fprintf('汽车同步附着系数fai0=%3.3f \n',fai0)fprintf('汽车车速为80km/h 的制动距离distance=%3.3f \n',s)其次再建立优化函数:首先应建立目标函数zhidong_m.m:function m=zhidong_m(x);l=3.950;a=2.95;b=l-a;h=1.170;G=9290*9.8;%汽车的原始相关数据z=0.2:0.05:0.8;ii=length(z);for i=1:iifaif=x.*z.*l./(b=z.*h);fair=(1-x).*z.*l./(a-z.*h);dm=(faif-z).^2+(fair-z).^2;endm=max(dm);然后根据约束条件建立约束函数zhidong_y.m:function[c,ceq]=zhidong_y(x);for z=0.2:0.05:0.8;l=3.950;a=2.95;b=l-a;h=1.170;G=9290*9.8;faif=x.*z.*l./(b+z.*h);fair=(1-x).*z.*l./(a-z.*h);ceq=[];if z>0.3&z<0.45c(1)=fair-z-0.05;endc(2)=fair-(z+0.07)/0.85;c(3)=0.85*(faif-0.2)+0.1-z;c(4)=0.85*(fair-0.2)+0.1-z;c(5)=fair-faif;end最后建立优化设计的主函数zhidongyouhua.m,进行求解计算并绘制制动力分配图,具体程序如下:clear allclclb=0.4;ub=0.6;x0=0.4;%制动力分配比初值l=3.950;a=2.95;b=l-a;h=1.170;G=9290*9.8;[beta,y]=fmincon('zhidong_m',x0,[],[],[],[],lb,ub,'zhidong_y')z=0.2:0.1:0.8;x=beta;%前后制动力分配比fai0=(1*beta-b)/h;%同步附着系数faif=x.*z.*l./(b+z.*h);%前轴利用附着系数fair=(1-x).*z.*l./(a-z.*h);%后轴利用附着系数Ef=b./(1-*beta-faif.*h);%前轴制动效率Er=a./(1-*(1-beta)+fair.*h);%后轴制动效率f1=0.1:10:2000;f2=0.5*(G/h*sqrt(b-^2+4*h*l*f1/G)-(G*b/h+2*f1));%I曲线ff2=(1-beta)./beta.*f1;%实际制动力分配曲线plot(f1,f2,f1,ff2)%绘制制动力分配曲线图grid onfai=0.7;%路面附着系数v=80;%制动初速度am=fai0*9.8;%最大制动减速度计算s=v*(0.1+0.3/2)/3.6+v^2/(25.92*am);%制动距离计算fprintf('汽车最大制动力分配比beta=%3.3f \n',beta)fprintf('汽车最大减速度am=%3.2f m/s2 \n',am)fprintf('汽车同步附着系数fai0=%3.3f \n',fai0)fprintf('汽车车速为80km/h的制动距离distance=%3.3f \n',s)通过上述仿真得出,对制动系统优化前的数据为:汽车最大制动力分配比beta=0.400汽车最大减速度am=4.86 m/s2汽车同步附着系数fai0=0.496汽车车速为80km/h的制动距离distance=56.380。
而仿真优化后得到的结果为:汽车最大制动力分配比beta=0.490汽车最大减速度am=6.16 m/s2汽车同步附着系数fai0=0.629汽车车速为80km/h的制动距离distance=45.608。
由上述仿真结果可知,优化结果比较令人满意,制动距离缩短了10米。
利用绘制功能可以很容易得到图1-2、1-3。
图1-2图1-3对比图1-2、1-3后可以看出,优化后 曲线能够在更大范围内位于I曲线下方,比优化前更能保证前轮先抱死,属于一种稳定工况。