最新北航多源信息融合总复习课
北航通信考研课件与历年真题
简介主要旳基本放大单元旳工作原理、基本概念、主要特征 和基本分析措施。电流模电路基础
作者:木哥考研 联络方式:
2024/9/21
北京航空航天大学202教研室
1
2.1 放大电路旳工作原理和图解分析 2.1.1 共射放大电路旳构成及其交、直流通路
射2024极/9/2偏1 置自稳电阻 北京航空航天大学202教研室
IC2
1
IR 2
2
IR
(1
2
2
) 2
同上。
北京航空航天大学202教研室
38
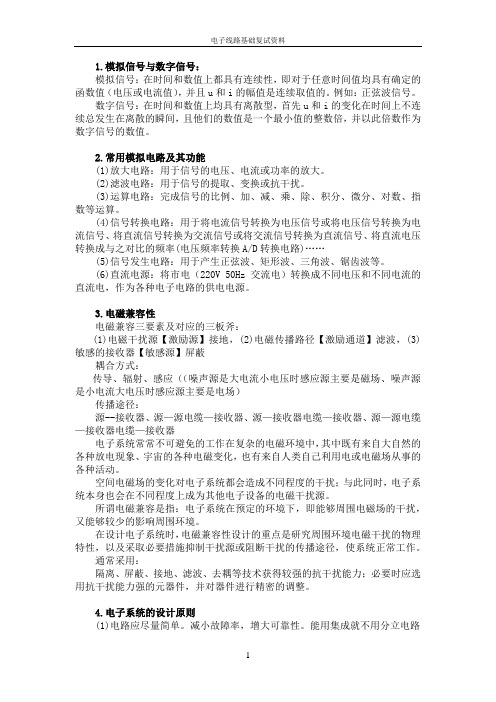
• 电流源电路-续1
名称 电路构造
串接镜 像电流 源
电流传播关系 动态输出电阻
IC2=IR/(1+2/β)
ro
1 2
2rce2
同基本镜像电
流源。
威尔逊 电流源
-闭环负 反馈镜 像电流 源
2024/9/21
IC2
1
IR 2
vCE
vce t
2024/9/21
北京航空航天大学202教研室
13
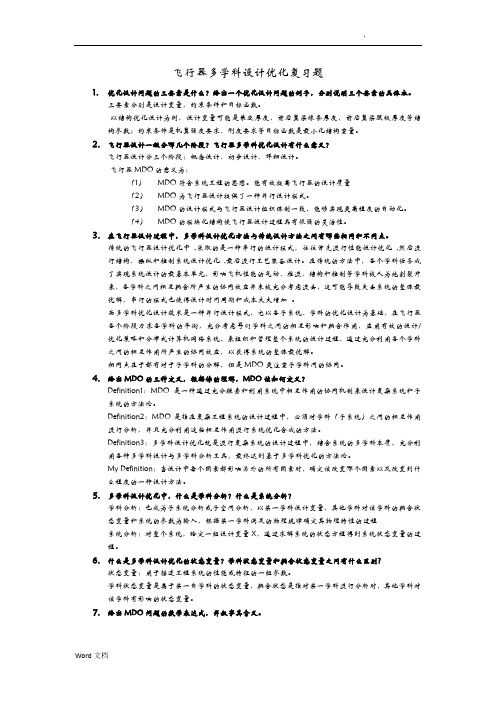
共射放大器各点波形:
+EC iC
iC
RB
RC
C2
t
C1
iB
vi
vi
iB
vC vC
t
vo
uo
t
t
t
2024/9/21
北京航空航天大学202教研室
14
直流通路和交流通路:
放大电路中各点旳电压或电流都是在静态直流上附加了 小旳交流信号。
T
RB
EB
2024/9/21
北京航空航天大学202教研室
北航2系电子复试-模电
1.模拟信号与数字信号:模拟信号:在时间和数值上都具有连续性,即对于任意时间值均具有确定的函数值(电压或电流值),并且u和i的幅值是连续取值的。
例如:正弦波信号。
数字信号:在时间和数值上均具有离散型,首先u和i的变化在时间上不连续总发生在离散的瞬间,且他们的数值是一个最小值的整数倍,并以此倍数作为数字信号的数值。
2.常用模拟电路及其功能(1)放大电路:用于信号的电压、电流或功率的放大。
(2)滤波电路:用于信号的提取、变换或抗干扰。
(3)运算电路:完成信号的比例、加、减、乘、除、积分、微分、对数、指数等运算。
(4)信号转换电路:用于将电流信号转换为电压信号或将电压信号转换为电流信号、将直流信号转换为交流信号或将交流信号转换为直流信号、将直流电压转换成与之对比的频率(电压频率转换A/D转换电路)……(5)信号发生电路:用于产生正弦波、矩形波、三角波、锯齿波等。
(6)直流电源:将市电(220V 50Hz交流电)转换成不同电压和不同电流的直流电,作为各种电子电路的供电电源。
3.电磁兼容性电磁兼容三要素及对应的三板斧:(1)电磁干扰源【激励源】接地,(2)电磁传播路径【激励通道】滤波,(3)敏感的接收器【敏感源】屏蔽耦合方式:传导、辐射、感应((噪声源是大电流小电压时感应源主要是磁场、噪声源是小电流大电压时感应源主要是电场)传播途径:源--接收器、源—源电缆—接收器、源—接收器电缆—接收器、源—源电缆—接收器电缆—接收器电子系统常常不可避免的工作在复杂的电磁环境中,其中既有来自大自然的各种放电现象、宇宙的各种电磁变化,也有来自人类自己利用电或电磁场从事的各种活动。
空间电磁场的变化对电子系统都会造成不同程度的干扰;与此同时,电子系统本身也会在不同程度上成为其他电子设备的电磁干扰源。
所谓电磁兼容是指:电子系统在预定的环境下,即能够周围电磁场的干扰,又能够较少的影响周围环境。
在设计电子系统时,电磁兼容性设计的重点是研究周围环境电磁干扰的物理特性,以及采取必要措施抑制干扰源或阻断干扰的传播途径,使系统正常工作。
智能信息处理导论ppt第10章信息融合课件

对于任意假设而言,其信任度 Bel( A )定义为 A 中全部子集对应的基本概率之和,即 Bel: 2 [0,1]
Bel(A) M(B),对所有的 A B A
Bel 函数也称为下限函数,表示对 A 的全部信任。由概率分配函数的定义容易得到 Bel() M() 0
10.5 Dempster-Shafer证据理论
10.5.1 Dempster-Shafer证据理论概述 10.5.2 基于Dempster-Shafer证据理论的信息融合
篮球比赛是根据运动队在规定的比赛 时间里 得分多 少来决 定胜负 的,因 此,篮 球比赛 的计时 计分系 统是一 种得分 类型的 系统
篮球比赛是根据运动队在规定的比赛 时间里 得分多 少来决 定胜负 的,因 此,篮 球比赛 的计时 计分系 统是一 种得分 类型的 系统
10.1 多源信息融合概述
10.1.1 多源信息融合基本概念 10.1.2 多源信息融合分类 10.1.3 多源信息融合技术的发展
篮球比赛是根据运动队在规定的比赛 时间里 得分多 少来决 定胜负 的,因 此,篮 球比赛 的计时 计分系 统是一 种得分 类型的 系统
M(A) 1
A
则称 M 是 2 上的概率分配函数, M(A)称为 A 的基本概率数,表示对 A 的精确信任。
篮球比赛是根据运动队在规定的比赛 时间里 得分多 少来决 定胜负 的,因 此,篮 球比赛 的计时 计分系 统是一 种得分 类型的 系统
10.5.1 Dempster-Shafer证据理论概述
Bel() M(B) B
篮球比赛是根据运动队在规定的比赛 时间里 得分多 少来决 定胜负 的,因 此,篮 球比赛 的计时 计分系 统是一 种得分 类型的 系统
北航飞行器多学科设计优化复习题
飞行器多学科设计优化复习题1.优化设计问题的三要素是什么?给出一个优化设计问题的例子,分别说明三个要素的具体容。
三要素分别是设计变量,约束条件和目标函数。
以结构优化设计为例,设计变量可能是蒙皮厚度,前后翼梁缘条厚度,前后翼梁腹板厚度等结构参数;约束条件是机翼强度要求、刚度要求等目标函数是最小化结构重量。
2.飞行器设计一般分哪几个阶段?飞行器多学科优化设计有什么意义?飞行器设计分三个阶段:概念设计、初步设计、详细设计。
飞行器MDO的意义为:(1)MDO符合系统工程的思想。
能有效提高飞行器的设计质量(2)MDO为飞行器设计提供了一种并行设计模式。
(3)MDO的设计模式与飞行器设计组织体制一致,能够实现更高程度的自动化。
(4)MDO的模块化结构使飞行器设计过程具有很强的灵活性。
3.在飞行器设计过程中,多学科设计优化方法与传统设计方法之间有哪些相同和不同点。
传统的飞行器设计优化中,采取的是一种串行的设计模式,往往首先进行性能设计优化,然后进行结构、操纵和控制系统设计优化,最后进行工艺装备设计。
在传统的方法中,各个学科任务成了实现系统设计的最基本单元,影响飞机性能的气动、推进、结构和控制等学科被人为地割裂开来,各学科之间相互耦合所产生的协同效应并未被充分考虑进去,这可能导致失去系统的整体最优解,串行的模式也使得设计时间周期和成本大大增加。
而多学科优化设计技术是一种并行设计模式,它以各子系统、学科的优化设计为基础,在飞行器各个阶段力求各学科的平衡,充分考虑哥们学科之间的相互影响和耦合作用,应用有效的设计/优化策略和分布式计算机网络系统,来组织和管理整个系统的设计过程,通过充分利用各个学科之间的相互作用所产生的协同效应,以获得系统的整体最优解。
相同点在于都有对于子学科的分解,但是MDO更注重子学科间的协同。
4.给出MDO的三种定义,根据你的理解,MDO该如何定义?Definition1:MDO是一种通过充分探索和利用系统中相互作用的协同机制来设计复杂系统和子系统的方法论。
北航课表
星期二《基础声学》2周-14周1节-2节 B204《航空发动机多学科优化》2周-14周3节-4节 (三)402《流场显示(定量化)理论与应用》1周-17周1节-2节(三)310《流体力学中的有限元方法》1周-17周3节-4节 (三)404《大气扰动中的飞行原理》1周-17周3节-4节 (四)315《新型空调制冷技术》1周-17周3节-4节 (三)407《微观经济理论(1)》5周-18周3节-4节 A949 (8系专用)《微观经济理论(1)》1周-3周3节-4节 A949 (8系专用)《宏观经济理论》10周-18周1节-2节 A928 (8系专用)《财务管理》5周-10周1节-2节 A949 (8系专用)《财务管理》2周-3周1节-2节 A949 (8系专用)《管理动力学》5周-9周1节-2节 A928 (8系专用)《管理动力学》2周-3周1节-2节 A928 (8系专用)《计算复杂性》2周-15周1节-2节 (三)402《运动稳定性》1周-15周3节-4节 (三)310《组织理论研究》10周-18周1节-4节 B106《社会研究方法(社会统计学.定量分析方法)》1周-9周1节-4节 B106《翻译导论》1周-18周1节-2节 B104《莎士比亚》1周-18周1节-2节 (三)309《高等内燃机学》2周-10周3节-4节 B122《信号处理系统的设计与实现》1周-17周3节-4节 B102《高等混凝土结构》1周-9周3节-4节 B204《英语一外A(硕)-9》2周-17周3节-4节 B101 001《英语一外A(硕)-8》2周-17周1节-2节 主北408014+026《英语一外A(硕)-10》2周-17周3节-4节 主北408009+015《英语一外A(硕)-7》2周-17周1节-2节 B101 007《英语一外B(硕)-28》2周-17周3节-4节 主北407(外语专用) SY10011《英语一外B(硕)-25》2周-17周3节-4节 F118SY10012+SY10151《英语一外B(硕)-20》2周-17周1节-2节 主606(外语专用) SY10072+SY10073《英语一外B(硕)-30》2周-17周3节-4节 F103ZY10151《英语一外B(硕)-24》2周-17周1节-2节 F103ZY10141《英语一外B(硕)-23》2周-17周1节-2节 主北405(外语专用) SY10141+SY10142《英语一外B(硕)-29》2周-17周3节-4节 主北405(外语专用) SY10091+SY10152《英语一外B(硕)-27》2周-17周3节-4节 主北412ZY10011《英语一外B(硕)-26》2周-17周3节-4节 主606(外语专用) SY10013+SY10153《英语一外B(硕)-22》2周-17周1节-2节 主北407(外语专用) ZY10071《英语一外B(硕)-21》2周-17周1节-2节 主北412SY10074+SY10261《英语一外B(硕)-19》2周-17周1节-2节 F118SY10071《数理统计A》1周-15周3节-4节 主M101《数理统计B-3班》1周-15周3节-4节 主M102005+006+007+010+014《数理统计B-1班》1周-15周1节-2节 主M101002+015+017+027《数理统计B-2班》1周-15周1节-2节 主M102001+003+004《笔译理论与实践》1周-18周3节-4节 主405《现代数字信号处理》1周-1《虚拟现实技术及应用》2周《燃气涡轮发动机特性》3周-《现代力学基础》2周-12周《飞行力学理论基础》2周-《飞行器气动设计理论与方法》1周《计算固体力学》2周-14周《高等流体力学》4周-15周《耐久性与损伤容限设计》1周-《算法设计与分析》1周-1《计算机图形学》1周-1《工业设计实验》1周-《计量经济学》5周-7周9节-《计量经济学》1周-3周9节-《博弈论与信息经济学》2周-3周《博弈论与信息经济学》5周-18周《复分析》2周-14周5《近世代数(Ⅱ)》7周-15周《非线性泛函分析》2周-1《高等量子力学》2周-17周《技术创新研究》10周-《人力资源管理》10周-18周《行政学说与行政经典》1《科学哲学原著选读》1周《文学翻译实践(汉译英)》1周《可靠性物理基础》2周-《软件可靠性工程导论》4周《结构优化设计(Ⅱ)》2周《计算机测控系统》1周-1《航天器姿态控制系统》1周《高等土木工程材料学》6周-1《高等岩石力学》1周-1《马克思主义理论(硕)-6班》1周-《马克思主义理论(硕)-8班》1周《马克思主义理论(硕)-7班》1周-《马克思主义理论(硕)-5班》1周-《英语一外A(硕)-11》2周-17《英语一外A(硕)-12》2周-1《英语一外B(硕)-36》2周-17《英语一外B(硕)-34》2周-17周5节-6《英语一外B(硕)-31》2周-17周5节《英语一外B(硕)-35》2周-17周5节-6节 主《英语一外B(硕)-33》2周-17周5节星期三《仪器电路设计》1周-18周3节-4节 B106《债与合同法专题》1周-13周1节-4节 (三)405《英语一外A(硕)-13》2周-17周1节-2节 B101 003《英语一外A(硕)-6》2周-17周3节-4节 主北408 011《英语一外A(硕)-14》2周-17周1节-2节 主北408013+019《英语一外A(硕)-5》2周-17周3节-4节 B101 006《英语一外B(硕)-44》2周-17周1节-2节 B225ZY10131《英语一外B(硕)-40》2周-17周1节-2节 B118ZY10031《英语一外B(硕)-39》2周-17周1节-2节 主北412SY10035+SY10036《英语一外B(硕)-38》2周-17周1节-2节 主606(外语专用) SY10033+SY10034+SY10037《英语一外B(硕)-37》2周-17周1节-2节 F118SY10031+SY10032《英语一外B(硕)-18》2周-17周3节-4节 F103SY10111+ZY10111《英语一外B(硕)-15》2周-17周3节-4节 主北412SY10064《英语一外B(硕)-14》2周-17周3节-4节 主606(外语专用) SY10063《英语一外B(硕)-43》2周-17周3节-4节 B225SY10065《英语一外B(硕)-42》2周-17周1节-2节 F103SY10191《英语一外B(硕)-41》2周-17周1节-2节 主北405(外语专用) SY10131+SY10132+SY10133《英语一外B(硕)-16》2周-17周3节-4节 B122ZY10061《英语一外B(硕)-17》2周-17周3节-4节 主北405(外语专用) SY10112《英语一外B(硕)-13》2周-17周3节-4节 F118SY10061+SY10062《数值分析A》1周-15周3节-4节 主M101《数值分析B-1班》1周-15周1节-2节 主M102002+006+007+017《数值分析B-3班》1周-15周1节-2节 主M101004+015+027《数值分析B-2班》1周-15周3节-4节 主M102003+005+008+010+013+014+019《英语二外》1周-8周1节-2节 B104《现代工业产品设计》1周-17周3节-4节 主405《高能束流表面工程与加工技术》3周-19周1节-2节(四)315《高分子材料及复合材料成型原理》2周-18周3节-4节(四)317《电子材料物理》3周-19周1节-2节 (四)317《磁性物理》3周-19周3节-4节 B102《线性系统(Ⅱ)》2周-18周1节-2节 B122《科技翻译(汉-英)》1周-18周1节-2节 (三)308《应用密码学》2周-15周1节-4节 主南405《现代词汇学》1周-18周1节-2节 (三)304《数字集成电路设计与应用可靠性》1周-17周1节-2节B121《人体工效学及康复工程实验》5周-10周1节-4节(三)402《应用工业工程》5周-18周3节-4节 A928 (8系专用)《法理学》1周-13周1节-4节 (四)323《语言学史》1周-18周3节-4节 (三)308《国际公法专题》1周-13周1节-4节 B204《美国犹太小说选读》1周-18周1节-2节 (三)404《宏观经济理论》1周-1周7节《宏观经济理论》3周-3周7节《偏微分方程数值解法(II)》2《生物医学仪器分析》2周-1《科学哲学与技术哲学》10《可靠性工程导论》2周-《现代控制理论(Ⅱ)》2周《模式识别》2周-19周7《有限元法及数值分析(Ⅱ)》《火箭发动机试验与测量技术》《高等光学(Ⅰ)》1周-17《建设项目管理》2周-1《马克思主义理论(硕)-4班》1周-15《马克思主义理论(硕)-3班》1周-15周5节-《俄语一外(硕)》1周-1《矩阵理论A》1周-15周《矩阵理论B-1班》1周-15周5《矩阵理论B-3班》1周-15周7节-8节 主《矩阵理论B-2班》1周-15周5节《环境研究方法与学科进展》《新型高分子材料》2周-14《金属凝固原理》2周-10周《高温腐蚀与防护》3周-《特种陶瓷新型工艺》2周-1《功能复合材料》3周-11周《实时嵌入式系统设计》1周-《中国语言文化》1周-15周《物理与核科学前沿》2周-《集成光学》2周-18周9《核技术及应用》2周-14周《数据模型与决策》10周-17周《高分子物理》2周-16《人文专题课:艺术生态》9周《超分子化学》2周-15《现代优化方法》2周-15《英语专业研究生口语》1周-《计量金融学》5周-17周5节《计量金融学》3周-3周5节-《高等结构分析方法》2周《自主移动机器人导论》1周《人文专题课:科学思想史》1星期五《软件技术基础》8周-17周1节-2节 B118《燃气涡轮发动机特性》3周-15周3节-4节 (三)405《汽液两相流动与传热》1周-17周3节-4节 B122《宏观经济理论》16周-18周3节-4节 A928 (8系专用)《中级投资学》11周-18周1节-2节 A1148 (8系专用)《计量经济学》4周-6周3节-4节 A1028 (8系专用)《数据挖掘的理论、方法与应用》6周-11周3节-4节A949 (8系专用)《数据挖掘的理论、方法与应用》4周-4周3节-4节A949 (8系专用)《计算复杂性》2周-15周1节-2节 (三)402《生物医学工程概论》3周-18周1节-4节 B204《信息技术与应用(电子政务)》1周-9周1节-4节 B121《十八世纪英国文学》1周-18周1节-2节 (三)308《测量不确定原理与应用》1周-18周1节-2节 B102《微弱信号检测技术》1周-17周1节-2节 B106《高等钢结构.》1周-17周3节-4节 B102《英语一外A(硕)-9》2周-17周3节-4节 B101 001《英语一外A(硕)-8》2周-17周1节-2节 主北408014+026《英语一外A(硕)-10》2周-17周3节-4节 主北408009+015《英语一外A(硕)-7》2周-17周1节-2节 B101 007《英语一外B(硕)-28》2周-17周3节-4节 主北407(外语专用) SY10011《英语一外B(硕)-25》2周-17周3节-4节 F118SY10012+SY10151《英语一外B(硕)-20》2周-17周1节-2节 主606(外语专用) SY10072+SY10073《英语一外B(硕)-30》2周-17周3节-4节 F103ZY10151《英语一外B(硕)-24》2周-17周1节-2节 F103ZY10141《英语一外B(硕)-23》2周-17周1节-2节 主北405(外语专用) SY10141+SY10142《英语一外B(硕)-29》2周-17周3节-4节 主北405(外语专用) SY10091+SY10152《英语一外B(硕)-27》2周-17周3节-4节 主北412ZY10011《英语一外B(硕)-26》2周-17周3节-4节 主606(外语专用) SY10013+SY10153《英语一外B(硕)-22》2周-17周1节-2节 主北407(外语专用) ZY10071《英语一外B(硕)-21》2周-17周1节-2节 主北412SY10074+SY10261《英语一外B(硕)-19》2周-17周1节-2节 F118SY10071《俄语一外(硕)》1周-18周1节-2节 主405《矩阵理论A》1周-15周3节-4节 主M101《矩阵理论B-1班》1周-15周1节-2节 主M101 002+008《矩阵理论B-3班》1周-15周3节-4节 主M102003+005+007+013+014+017《矩阵理论B-2班》1周-15周1节-2节 主M102004+006+015《二十世纪英美诗歌》1周-18周3节-4节 (三)308《高等高分子化学1》2周-14周1节-2节 (四)315《系统仿真及其应用》1周-1周3节-4节 A928 (8系专用)《系统仿真及其应用》4周-10周3节-4节 A928 (8系专用)《信息检索原理》1周-9周3节-4节 B106《先进飞行器设计工程(上)》2周-19周1节-2节 B122《中外翻译简史》1周-18周3节-4节 (三)402《应用工业工程》14周-14周3节-4节 A928 (8系专用)《现代微电子学》2周-1《现代图像通信系统》2周《光纤通信与光纤网络》1周《人工智能原理与方法》1周-《测试系统动力学》2周-1《飞行实时仿真系统及技术》《飞行实时仿真系统及技术》《现代测试技术与数据处理》2周《发动机状态监视与故障诊断》《航空宇航学科综合课(博)》《高等工程热力学》1周-《疲劳强度》1周-17周《电子设备热设计》1周-《湍流模式理论及其应用》1周《直升机空气动力学》8周《程序设计语言原理》1周-《软件技术基础》1周-10《高等数学规划》8周-8周7节《宏观经济理论》1周-1周7节《宏观经济理论》4周-7周7节《知识管理》17周-18周5节《非线性光学(硕)》2周-1《医学图像处理及成像技术》3周《传感器技术与应用》1周-《现代光电子学(Ⅰ)》1周-《马克思主义理论(硕)-6班》1周-《马克思主义理论(硕)-8班》1周《马克思主义理论(硕)-7班》1周-《马克思主义理论(硕)-5班》1周-《英语一外A(硕)-13》2周-《英语一外A(硕)-14》2周-17周《英语一外B(硕)-44》2周-17《英语一外B(硕)-40》2周-17周《英语一外B(硕)-39》2周-17周5节《英语一外B(硕)-38》2周-17周5节-6节 主60《英语一外B(硕)-37》2周-17周5节《英语一外B(硕)-42》2周-17《英语一外B(硕)-41》2周-17周5节-6节 主北4《音系学》1周-18周5节《高温腐蚀与防护》3周-《特种陶瓷新型工艺》2周-1《功能复合材料》3周-11周《膜及膜分离》3周-11《科技翻译(英-汉)》1周-1》3周-15周7节-8节 (三)405-12周9节-11节 (四)317》2周-17周7节-9节 主南403法》1周-16周9节-11节 (三)305周-14周5节-8节 (三)313周-15周7节-8节 (四)317》1周-17周9节-11节 (三)3101周-17周9节-11节 主M4011周-17周7节-8节 B102》1周-9周7节-8节 F103周9节-11节 A1028 (8系专用)周9节-11节 A1028 (8系专用)周-3周7节-8节 A928 (8系专用)周-18周7节-8节 A928 (8系专用)14周5节-8节 主南405-15周9节-11节 (三)4042周-15周9节-12节 主405周-17周5节-6节 (三)30410周-18周5节-8节 B106周-18周9节-12节 (四)315典》1周-9周5节-8节 B106读》1周-9周5节-8节 B104)》1周-18周7节-8节 (三)404》2周-13周5节-8节 B118论》4周-15周9节-11节 B121》2周-18周9节-11节 B1011周-17周10节-12节 B106》1周-12周10节-12节 B1186周-17周9节-11节 (三)3081周-16周7节-8节 F118》1周-15周7节-8节 主M101 001+015班》1周-15周7节-8节 主M401 017》1周-15周5节-6节 主M401 006+027》1周-15周5节-6节 主M101 007+008周-17周5节-6节 B101 004+0202周-17周5节-6节 主北408 017周-17周5节-6节 F103 ZY101715节-6节 主北407(外语专用) SY10171 7周5节-6节 F118 SY10041+SY100421周7节-8节 A928 (8系专用)3周7节-8节 A928 (8系专用))》2周-15周9节-12节 主北4082周-18周7节-8节 (三)308学》10周-18周5节-8节 B104》2周-14周9节-11节 B118》2周-18周7节-10节 B12219周7节-9节 (四)317Ⅱ)》2周-15周5节-6节 B204技术》2周-18周7节-9节 B106周-17周10节-12节 B1012周-18周7节-8节 B119周-15周7节-8节 主M401 002+011+026周5节-6节 主M401 009+010+013+014+019+020 1周-18周5节-6节 主南304周-15周7节-8节 主M10115周5节-6节 主M101 002+0088节 主M102 003+005+007+013+014+017周5节-6节 主M102 004+006+015进展》2周-15周5节-8节 F103周-14周5节-6节 (四)315周-10周5节-6节 (四)323》3周-11周7节-8节 B1212周-10周7节-8节 (三)313周-11周7节-8节 (四)315》1周-17周9节-10节 主南405周-15周5节-8节 (三)310》2周-14周5节-8节 主北40818周9节-11节 主南304周-14周7节-8节 (三)304-17周7节-8节 A949 (8系专用)周-16周5节-8节 B101态》9周-14周9节-11节 主M101周-15周9节-12节 B104周-15周7节-8节 主南306》1周-18周7节-8节 (三)405周5节-6节 A1028 (8系专用)周5节-6节 A1028 (8系专用)》2周-18周9节-12节 F103论》1周-17周5节-6节 B1062周-16周5节-8节 B121》2周-15周9节-12节 F118络》1周-17周5节-6节 B204》1周-13周7节-8节 (四)3232周-14周10节-12节 B121技术》2周-13周7节-9节 F103技术》2周-13周7节-9节 主405理》2周-14周5节-8节 (三)305诊断》2周-10周5节-8节 B106博)》1周-13周5节-8节 主南403》1周-16周9节-11节 B104周-17周9节-11节 B102》1周-17周5节-6节 主405用》1周-17周10节-11节 D120》8周-16周9节-12节 B122》1周-17周9节-11节 主M401周-10周9节-12节 主M102周7节-8节 A1028 (8系专用)1周7节-8节 A928 (8系专用)7周7节-8节 A928 (8系专用)周5节-6节 A928 (8系专用)2周-14周9节-12节 主南304术》3周-17周5节-8节 (三)407》1周-17周10节-12节 B118》1周-17周10节-12节 B106》1周-15周7节-8节 主M101 001+015班》1周-15周7节-8节 主M401 017》1周-15周5节-6节 主M401 006+027》1周-15周5节-6节 主M101 007+008》2周-17周5节-6节 B101 003周-17周5节-6节 主北408 013+019周-17周5节-6节 F207 ZY10131-17周5节-6节 (四)317 ZY10031周5节-6节 主北412 SY10035+SY10036主606(外语专用) SY10033+SY10034+SY10037 7周5节-6节 F118 SY10031+SY10032周-17周5节-6节 F103 SY10191主北405(外语专用) SY10131+SY10132+SY10133 8周5节-6节 (三)304》3周-11周5节-6节 B1222周-10周5节-6节 (三)313周-11周5节-6节 (四)315。
北航多源信息融合20157证据理论基础

2020/3/28
多源测试信息融合
9
2 证据理论基础
(1) 识别框架
假设现有一个判决问题,对于该问题我们所能
认识到的所有可能答案的集合用Θ表示,且Θ中的所
有元素都满足两两互斥;任一时刻的问题答案只能
取Θ中的某一子集,答案可以是数值变量,也可以
是非数值变量,则称此互不相容命题的完备集合Θ
为识别框架,可表示为:
Shafer指出以上三种概率的解释都没有涉及概率推断的构造
特征,因此, Shafer提出了对概率的第四种解释——构造性解
释:
概率是指某人在证据的基础上构造出的他对某一命题为真 的信任程度,简称信度。
2020/3/28
多源测试信息融合
7
主要内容
•引言 •证据理论基础 •证据理论研究现状 •未来研究方向
多源测试信息融合 证据理论基础(1)
万江文
主要内容
•引言 •证据理论基础 •证据理论研究现状 •未来研究方向
2020/3/28
多源测试信息融合
2
主要内容
•引言 •证据理论基础 •证据理论研究现状 •未来研究方向
2020/3/28
多源测试信息融合
3
1 引言
▪主观贝叶斯理论的缺点:
(1)要求概率(各证据之间)都是独立的; (2)要求先验概率P(Oi)和条件概率P(Dj|Oi); (3)要求统一的识别框架,不能实现不同层
2020/3/28
多源测试信息融合
12
2 证据理论基础
•例1:
以掷骰子为例,要判断其可能所出现的点数,则识别 框架Θ={1,2,3,4,5,6},而{1}则表示“掷出的点数为1”,则 {2,4,6}表示“掷出的点数为偶数”,{1,2,3,4,5}则表示 “掷出的点数不为6”,即“掷出的点数为1, 2, 3, 4, 5中 的某一个”。由此可见,幂集合中的每一个子集A都代 表一个命题。
组合导航复习(完整版).

一.名词解释.1.导航,导航系统及常用导航方法.(书P1)导航:将航行体从起始点导引到目的地的技术方法.导航系统:能够向航行体的操纵者或控制系统提供航行体位置,速度,航向等即时运动状态的系统.常用导航方法:①航标方法.②航位推算法.③天文导航.④惯性导航.⑤无线电导航.⑥卫星定位导航.2.航位推算导航.(书P1)航位推算导航:从一个已知坐标位置开始,根据航行体在该点的航向,航速和航行时间,推算下一时刻的坐标位置的导航过程和方法.优点:航位推算导航技术不受天气,地理条件的限制,是一种自主式导航方法.缺点:随着时间的推移,其位置累积误差会越来越大.3.衡量导航性能的参数有哪些?答:精度,覆盖范围,系统容量,导航信息更新率,导航信息维数;可用性,可靠性,完善性,多值性.4.伪距.(书P13)用户接收机一般不可能有十分精确的时钟,他们也不与卫星钟同步,因此用户接收机测量得出的卫星信号在空间的传播时间是不准确的,计算得到的距离也不是用户接收机和卫星之间的真实距离.这种距离叫做伪距.5.定轴性与进动性.(书P36)定轴性:陀螺仪的转子绕自转轴高速旋转,即具有动量矩H 时,如果不受外力矩作用,自转轴将有相对惯性空间保持方向不变的特性.进动性:如果在陀螺仪上施加外力矩M,会引起陀螺仪动量矩H 相对惯性空间转动的特性.6.比力.(书P53)设质点在i 系(惯性系)中的位矢为r ,质点在外力作用下在惯性空间的运动状态可用牛顿第二定律导出,即22i d r F m mr dt ==.在上述等式当中,+F F F =引非引力,F 非引力为非引力外力,是指作用在载体上的发动机推力,空气阻力,升力,地面反作用力等等.=F mG 引为引力外力.由此得22i F d r G dt m =+非引力.比力定义为F f m=非引力,为载体的非引力惯性加速度矢量,也称视加速度矢量.G 为中心引力加速度矢量.7.惯导系统(书P31)惯性导航系统(Inertial Navigation System,INS)是利用惯性敏感器(陀螺仪和加速度计)测量得到的载体运动的角速率和加速度,依据惯性定律计算载体位置,速度,姿态等运动参数的装置或系统.8.数学平台.(书P21)数学平台的主要任务是用捷联陀螺仪测量的载体角速度计算出载体坐标系b 到导航坐标系n 的姿态变换矩阵nb C ;从姿态矩阵的元素中提取载体的姿态和航向角信息;用姿态矩阵把捷联系统加速度计的输出从载体坐标系变换到导航坐标系(n nb b f C f ).姿态矩阵计算,姿态航向角计算,比力变换等效于平台惯导的实体平台功能,但是靠数学变换和计算机实现.通常把这三项计算称作”数学平台”.9.对准.(书P72)在惯导系统加电启动后,平台的三轴指向是任意的,没有确定的方位.因此,在系统进入导航工作状态之前,必须将平台的指向准确估计出来.这一确定平台坐标系相对于参考系的方位的过程称为惯导系统的对准.10.传递对准.(书P81)传递对准是主惯导向子惯导实时传输子惯导对准所需要的导航参数和数据,子惯导通过动态匹配它与主惯导的数据,估计它所建立的坐标系与主惯导所建立坐标系之间的差别,并进行修正,以建立与主惯导相一致的导航坐标系的过程.(这段话比较拗口,要耐心地看.)11.标定与补偿.(书P94,P96)标定:通过比较陀螺仪,加速度计的输出值与已知的输入运动或基准信息,确定误差模型或测量模型的误差系数,使输出在其取值范围内符合使用要求的过程.误差补偿:通过测量确定适当的误差系数,并利用这误差系数通过误差模型对测量值加以修正,以除去惯性敏感器或系统中可预测的误差项.12.组合导航(书P26)组合导航技术是指使用两种或两种以上的不同导航系统(或设备)对同一信息源作测量,利用不同导航设备性能上的互补特性,从这些测量值的比较值中提取各系统的误差并校正之,以提高整个导航系统性能的方法和手段.13.最优组合导航(书P104)为了与经典的回路控制方法和其他确定性修正方法相区别,通常称采用滤波和估计技术的组合导航为最优组合导航.最优组合导航的基本原理是利用两种或两种以上的具有互补误差特性的独立信息源或非相似导航系统,对同一导航信息作测量并解算以形成量(liang,第二声)测量(liang,第四声),以其中一个系统作为主系统,利用滤波算法估计该系统的各种误差(称为状态误差),再用状态误差的估值去校正系统状态值,以使组合系统的性能比其中任何一个独立的子系统都更为优越,达到综合目的.14.线性滤波(书P106)基于线性系统进行的滤波称为线性滤波.主要包括:①最小二乘估计:它不考虑被估参数和观测参数的统计特性,因此不是最优估计.②卡尔曼滤波器:1960年卡尔曼提出了一种实用的递推最优估计算法:卡尔曼滤波器.它是建立在状态空间时域公式基础上的最优递推滤波算法,成为现代许多信息融合算法的基础.15.卡尔曼滤波(书P113)卡尔曼滤波是一种线性无偏,以误差方差最小为估计准则的最优估计算法.特点:①它的数学模型是一阶的,即连续系统是一阶微分方程,离散系统是一阶差分方程,特别适合计算机处理.②由于采用了状态转移矩阵来描述实际的动态系统,在许多工程领域中都可以使用.③卡尔曼滤波器的每次运算,只要求前一时刻的估计数据和当前时刻的测量数据,不必存储大量的历史数据.16.Sagnac效应.(书P42)光学陀螺的工作原理主要是基于Sagnac效应.所谓Sagnac效应是指在任意几何形状的闭合光路中,从某一观察点出发的一对光波沿相反方向运行一周后又回到该观察点时,这对光波的光程将由于该闭合光路相对于惯性空间的旋转而不同,光程差的大小与闭合光路的转动速率成正比.17.数据库参考导航(书P248)数据库参考导航(Data Base Reference Navigation,DBRN)是利用预先测量的地理或天文数据(源)库或地图作为参考,与传感器测量的相关信息进行计算,比较和相关处理,确定载体精确的定位信息和为载体提供导航的过程,方法和技术的总称.18.地形辅助导航(书P22)地形辅助导航(Terrain Aided Navigation,TAN)是利用地形,地物和地貌特征进行导航的总概念.地形辅助导航的基本工作原理:在系统中存储有飞行器所要飞越地区的三维数字地图;在飞行过程中,系统利用地形特征传感器得出飞行器正下方的地形剖面图或其他特征;系统将所存储的数字地图与测得的地形剖面图相比较,当达到匹配时,便求出了飞行器所在点的位置.二.简答题1.简述GPS 的组成,定位的几何原理以及GPS 定位过程.①GPS 系统的组成:GPS 卫星星座(空间部分),地面监控系统(控制部分),GPS 信号接收机(用户部分).②定位原理:三球交会(不是汇)原理.(书P13)三球交会原理:用户接收机与卫星之间的距离为:R =其中111,,,R x y z 为卫星到用户接收机之间的距离,卫星的坐标,是已知量;,,x y z 为用户接收机的坐标,为未知量.如果接收机能测出距三颗卫星的距离,便有三个这样的方程式,把这三个方程式联立起来,便能求解接收机的位置坐标,从而确定用户的位置.实际上, 用户接收机一般不可能有十分精确的时钟,他们也不与卫星钟同步,因此用户接收机测量得出的卫星信号在空间的传播时间是不准确的,计算得到的距离也不是用户接收机和卫星之间的真实距离.这种距离叫做伪距.假设用户接收机在接收卫星信号的瞬间,接收机的时钟与卫星导航系统所用时钟的时间差为t ,则有:R c t = 其中,c 为光速;t 为未知数.只要接收机能测出据四颗卫星的伪距,便有四个这样的方程.联立即可求解接收机的位置和准确的时间.③GPS 定位过程:围绕地球运转的人造地球卫星连续向地球表面发射经过编码调制的连续无线电信号,信号中含有卫星信号准确的发射时间,以及不同的时间卫星在空间的准确位置(由卫星运动的星历参数和历书参数描述);卫星导航接收机接收卫星发出的无线电信号,测量信号的到达时间,计算卫星和用户之间的距离;用导航算法(最小二乘法或滤波估计算法)解算得到用户的准确位置.2.简述平台式惯导原理.平台式惯导以陀螺为测量元件,通过三个框架形成了一个不随载体姿态和载体在地球上的位置而变动的物理稳定平台,保持着指向东北天三个方向的坐标系.固定在平台上的加速度计分别测量出在这三个方向上的载体加速度,将其对时间一次和二次积分,从而导出载体的速度和所经过的距离,载体的航向与姿态,最后由陀螺及框架构成的稳定平台输出.3.简述捷联式惯导原理.捷联式惯导将陀螺和加速度计直接固联在运载体上.惯性传感器(陀螺,加速度计)输出的是载体相对惯性空间的加速度和角速度,由计算机将载体坐标系下测量的数据变换到导航坐标系中再进行导航计算.因为导航计算是以参考坐标系(导航坐标系)为参考来确定载体的位置,速度,姿态等运动参数的,坐标变化和姿态角计算实际上起到了平台式惯导系统的稳定平台的作用,所以也称为”数学平台”.4.为什么说陀螺仪和加速度计是决定惯导系统精度的决定因素?(书P70)①陀螺仪的误差:陀螺漂移引起的误差大多数是振荡的,但对某些导航参数和平台误差角将产生常值误差.而最为严重的是北向陀螺的漂移y ε及方位陀螺的漂移z ε,对于经度误差()t δλ将引起随时间积累的位置偏差.但这并不意味着可以放松对东向陀螺的要求.实际上东向陀螺漂移x ε直接影响方位对准精度.因此,3个陀螺漂移的大小都是决定系统精度的关键因素.②加速度计的误差:加速度计零偏误差将产生振荡误差及常值误差.如两个水平加速度计的零偏误差,x y ∇∇将引起经纬度及平台姿态角的常值误差.总之,陀螺仪和加速度计的精度是影响惯导系统精度的决定性因素,其中陀螺仪的精度尤为突出.5.阐述惯导系统的基本误差特性.(P70,与题目4类似,是题目4的概括)①陀螺仪:引起的系统误差大多为振荡的,对某些导航参数和平台误差角将产生常值误差.最为严重的是北向陀螺漂移以及方位陀螺漂移,对经度误差将引起随时间积累的位置偏差.东向陀螺的漂移误差将直接影响方位对准精度.②加速度计的误差:产生振荡及常值误差.其中水平加速度计将引起经纬度及平台姿态角常值误差.总之,陀螺仪和加速度计的精度是影响惯导系统精度的决定性因素,其中陀螺仪的精度尤为突出.6.最优组合导航的原理,及其主要过程.①定义:采用滤波和估计技术的组合导航为最优组合导航.②基本原理:是利用两种或两种以上的具有互补误差特性的独立信息源或非相似导航系统,对同一导航信息作测量并解算以形成量测量,以其中一个系统作为主系统,利用滤波算法估计该系统的各种误差(称为状态误差),再用状态误差的估值去校正系统状态值,以使组合系统的性能比其中任何一个独立的子系统都更为优越,达到综合目的.③应用最优滤波实现组合导航的主要过程:a.设计”最优”系统并对其特性进行计算和评估.b.考虑成本限制,灵敏度特性,计算要求和能力,测量程序和系统知识了解程度等,对”最优”系统进行简化,设计合适的”次优”系统.c.构建并试验样机系统,并按要求做最后调整和改进.7.卡尔曼滤波器的定义,特点:①定义:卡尔曼滤波是一种线性,无偏,以误差方差最小为估计准则的最优估计算法.②主要特点:a.它的数学模型是一阶的,即连续系统是一阶微分方程,离散系统是一阶差分方程,特别适合计算机处理.b.由于采用了状态转移矩阵来描述实际的动态系统,在许多工程领域中都可以使用.c.卡尔曼滤波器的每次运算,只要求前一时刻的估计数据和当前时刻的测量数据,不必存储大量的历史数据,大大减少了对计算机运算能力的要求.8.写出离散卡尔曼滤波方程组.9.卡尔曼滤波误差产生的原因?①系统数学模型不准确或对系统数学模型作了一定的简化及近似,忽略了有关误差因素,使实际系统的状态转移矩阵,系统干扰矩阵等等与滤波计算时应用的相应参数矩阵有差别.②初始状态方差估计不准确,即0P 存在误差.③噪声的统计特性不准确,即,k k Q R 存在误差.④使用了不准确的增益矩阵k K .10.联邦滤波的基本思想.基本思想是先分散处理,再全局融合,即在诸多非相似子系统中选择一个信息全面,输出效率高,可靠性绝对保证的子系统作为公共参考系统,与其他子系统两两相结合,形成若干子滤波器;各子滤波器并行运行,获得建立在子滤波器局部观测基础上的局部最优估计;这些局部最优估计在主滤波器内按融合算法合成,从而获得建立在所有观测量基础上的全局估计.11.什么是直接估计方法,间接估计方法?惯性组合导航系统根据滤波器状态可将估计方法分为直接估计法和间接估计法.①直接估计法以各种导航参数(如惯导系统输出的精度λ,纬度L 和对地速度,,N U E v v v 等,采用符号I X 表示)为主要滤波状态,滤波器估值的主要部分就是导航参数估值.②间接法以惯导系统导航参数误差I X ∆为滤波器主要状态,滤波器估值的主要部分就是导航参数误差估值ˆX∆,然后用ˆX ∆去校正I X .12.简述输出校正和反馈校正的优缺点.(书P132)①输出校正:优点:工程实现比较方便,组合滤波器的故障不会影响惯导的工作.缺点:由于输出校正的滤波器所估计的状态是未经校正的导航参数误差,而惯导的误差是随时间增长的,卡尔曼滤波器的数学模型建立在误差为一阶小量且取一阶近似的基础上,因此在长时间工作时,由于惯导误差不再是小量,会使滤波方程出现模型误差,使滤波精度下降.②反馈校正:优点:反馈校正的滤波器所估计的状态是经过校正的导航参数误差,在反馈校正后,惯导的输出就是组合系统的输出,误差始终保持为小量,克服了输出校正的缺点,因此可以认为利用反馈校正的系统状态方程,更能接近真实地反映系统误差状态的动态过程,也可以认为没有模型误差.缺点:工程实现没有输出校正简单,且滤波器故障直接影响惯导输出,降低了系统可靠性.13.简述GPS/INS松耦合,紧耦合,并比较两者的特点.(P151)①松耦合组合(速度位置组合):将INS(惯导)和GNSS(全球导航卫星系统,这里特指GPS系统)接收机各自输出的位置估值和速度估值进行比较,得到的差值形成滤波器(如卡尔曼滤波器)的测量输入量,对惯导系统提供测量更新.②紧耦合组合(伪距,伪距率组合):将GNSS接收机的伪距测量值和伪距率测量值,与利用INS导航输出计算出的相应伪距,伪距率估计值进行比较,得到的差值形成(卡尔曼)滤波器的测量输入值,经组合导航滤波器,生成惯导系统的误差估值,这些估值可在每次测量更新后对惯导系统进行修正,以提高惯导的精度.③特点(文字版):与松耦合相比,紧耦合的主要优点有:不存在将一个卡尔曼滤波器的输出用作第二个滤波器的测量输入时所产生的问题;隐含完成GNSS位置和速度协方差的交接;组合系统不需要用完整的GNSS数据来辅助INS,即使只跟踪到单个卫星信号,GNSS数据也会输入滤波器,用于估计INS的误差,从而增加了GNSS使用的灵活性,但是在这种情况下估计精度会下降很快.④特点比较(表格版本):(见书P151)14.GPS/INS伪距,伪距率组合的概念.紧耦合组合是将GNSS接收机的伪距测量值和伪距率测量值,与利用INS导航输出计算出的相应伪距,伪距率估计值进行比较,得到的差值形成(卡尔曼)滤波器的测量输入值,经组合导航滤波器,生成惯导系统的误差估值,这些估值可在每次测量更新后对惯导系统进行修正,以提高惯导的精度.由于这种组合使用GNSS测量的伪距和伪距率以及INS导航结果相应的伪距和伪距率估值作为组合滤波器的测量值,因此,这种紧耦合组合也称为伪距,伪距率组合.15.简述SITAN地形辅助导航的原理.(书P261)根据INS输出的位置可在数字地图上找到地形高程,而INS输出的绝对高度与地形高程之差为飞行器相对高度的估计值,它与雷达高度表实测相对高度之差就是卡尔曼滤波的测量值.由于地形的非线性特性导致了量测方程的非线性,采用地形随机线性化算法可实时地获得地形斜率,得到线性化的量测方程;结合INS的误差状态方程,经过卡尔曼滤波递推算法可得导航误差状态的最优估值,采用输出校正可修正INS的导航状态,从而获得最优导航状态.16.巡航导弹的惯性地形匹配制导过程.(书P256)①在侦查阶段,预先绘制出飞行弹道附近区域的数字地形标高数字地图获取数字的地形高程数据,按巡航导弹预定的发射点到被攻击目标点之间的最佳基准弹道,确定若干个具有明显地形特征的地形匹配区.②巡航导弹飞行过程中进行地形数据实测,确定出导弹实际位置.③修正巡航导弹的飞行航迹.三.计算题.1.推导并说明纯惯性高度通道的稳定性.2.写出惯导比力方程,并说明其含义,指出每一项的物理意义.上述方程表明了加速度计所敏感的比力与载体相对地球加速度之间的关系.其右边第一项是载体对地速度在导航坐标系中的变化率,即在测量坐标系中表示的载体相对地球的加速度;第二项是地球自转角速度和导航坐标系相对地球的转动所产生的科氏加速度和向心加速度;第三项是地球重力加速度.(需会推导)推荐一首歌:《ありふれたかなしみの果て》Contributed by 施俊杰。
北航多源信息融合2017课件9证据理论应用分析

或者另一种方法求
c1=1-{M11(民航)M12(轰炸机)+ M11(轰炸机)M12(民航)} =1-(0.3*0.5+0.4*0.3)=0.73
A j {民航}i 1 j 2
M
1j
(A i )
=M11(民航)M12(民航)+M11(民航)M12(不明)+M11(不明)M12(民航)
=0.24
0.05 0.3 0.4
0.12
0.25 0 0
0.15
0.1 0.2 0
0
0 0 0
0.13
0.15 0.25 0.2
15
多源测试信息融合
解:由Dempster组合公式对mRF(· )和mPW(· )组合得到ESM传感器关于目标 识别的基本概率赋值,组合情况如表3.3所示,其中Φ表示空集。 由表3.3可得,mRF(· )和mPW(· )这两批证据的不一致因子K1为 :
D{ h2 ,h3 ,h4 }
m( D) m(h2 , h3 , h4 ) 0.08
D { h2 , h3 , h4 }
m( D) m({h1 , h2 }) m({h3 , h4 }) m({h2 , h3 , h4 })
0.72 0.08 0.06 0.86,
m( D) m(h1 ) m({h1 , h2 }) m({h1 , h2 , h3 })
D { h1 , h2 }
0.14 0.72 0.06 0.92,
Bel ({h3 , h4 })
2018/10/12
D{ h3 ,h4 }
m( D) m(h3 , h4 ) 0.08,
第四章 遥感图像处理-多源信息融合ppt课件
只有对地学规律、影象特征、成象机理这三者有深 刻的认识,并把它们有机地结合起来,信息复合才 能达到更好地效果。
(二)多源遥感信息复合的应用案例
遥感信息的复合 (1)不同传感器的遥感数据的复合, (2)不同时相的遥感数据的复合 (3)遥感与非遥感信息的复合
遥感图象处理:信息复合
信息复合的概念和简介 信息复合的应用举例
-不同传感器的遥感信息复合 -不同时相的遥感数据复合 遥感数据复合前处理—几何纠正和空间配准 常用的数据复合方法 遥感信息与非遥感信息的复合
(一)信息复合的概念和简介
定义:多源信息的复合是将多种遥感平台, 多时相遥感数据以及遥感数据与非遥感数据 之间的信息组合匹配的技术。
透 明 叠 加 检 查
(四)常用的数据融合方法—彩色合成
数据融合方法:彩色变换、 K-L 变换,比值变换; 基于小波理论的特征融合、基于贝叶斯法则的分 类融合等
诸多复合方案中,彩色合成方法的效果比较明显。 所以应尽可能生成三幅新图像,分别赋予红、绿、 蓝色,进行假彩色合成。
具体做法举例:
将TM与SPOT复合,选取TM三个波段4,3,2 和 SPOT全色波段共4个波段, 复合方法1:每幅TM图像均与SPOT图像作逐点运 算,如相加、相减或相乘,或其他运算方案,生 成三幅图像,进行彩色合成,生成复合图像。
(四)常用的数据融合方法—彩色合成
具体做法举例:
复合方法2:设 LRTM、 LGTM、 LBTM分别为TM4,3,2 波段的亮度值, LSPOT为SPOT全色波段的亮度值, A为权函数,则生成三幅新图像亮度值L复为: LR复=A·LSPOT·LRTM/(LRTM +LGTM +LBTM) LG复=A·LSPOT·LGTM/(LRTM +LGTM +LBTM) LB复=A·LSPOT·LBTM/(LRTM +LGTM +LBTM) 将新生成的图像LR复、LG复、LB复分别赋予红、绿、 蓝色,合成后生成复合图像。
多源机会信号飞行器EKF_融合导航方法
引用格式:刘俊妧, 陈渲文, 张少莉, 等. 多源机会信号飞行器EKF 融合导航方法[J]. 中国测试,2023, 49(12): 94-100. LIU Junyuan, CHEN Xuanwen, ZHANG Shaoli, et al. Aircraft EKF fusion navigation method based on multi-source opportunity signals[J]. China Measurement & Test, 2023, 49(12): 94-100. DOI: 10.11857/j.issn.1674-5124.2023060057多源机会信号飞行器EKF 融合导航方法刘俊妧1, 陈渲文2, 张少莉1, 陈 森2(1. 中国飞行试验研究院,陕西 西安 710089; 2. 陕西师范大学数学与统计学院,陕西 西安 710119)摘 要: 该文考虑多源异构机会信号情况下的飞行器导航问题,提出一种新型扩张卡尔曼滤波融合导航方法。
首先,针对5类典型的机会信号,构建机会信号测量值模型。
然后,采用中心式交互结构,设计可自由增减导航机载模块的融合导航框架,具体包括3部分:局部机载设备的定位预报模块、局部机载设备的测量更新模块、中心融合计算模块。
通过交互中心融合计算模块与局部机载设备的信息,迭代更新当前飞行器的位置预估值。
进一步,给出所提出融合导航方法的误差分析结果,并且建立基于估计误差方差最小化的融合权重优化选取方案。
关键词: 机会信号导航; 扩张卡尔曼滤波; 融合滤波; 到达时间; 到达角度中图分类号: TN966文献标志码: A文章编号: 1674–5124(2023)12–0094–07Aircraft EKF fusion navigation method based on multi-source opportunity signalsLIU Junyuan 1, CHEN Xuanwen 2, ZHANG Shaoli 1, CHEN Sen 2(1. Chinese Flight Test Establishment, Xi’an 710089, China; 2. School of Mathematics and Statistics, Shaanxi NormalUniversity, Xi’an 710119, China)Abstract : This paper considers the navigation of aircraft with multi-source heterogeneous opportunity signals,and proposes a new extended Kalman filter based fusion navigation method. Firstly, the measurement models of five typical types of opportunity signals are presented. Then, the fusion navigation framework is constructed by using a centralized interactive structure, which can expediently increase or decrease navigation airborne modules. The fusion navigation contains three parts: the position prediction module of local airborne equipment, the measurement based update module of local airborne equipment, and the central fusion calculation module. By fusing the information of the calculation module in interaction center and local airborne equipment, the estimated position of the current aircraft is iteratively updated. Furthermore, the error analysis results of the proposed fusion navigation method are presented, and the optimal selection of fusion weight based on minimizing the variance of estimation error is established.Keywords : navigation via signal of opportunity; extended Kalman filter; fusion filtering; arrival of time;arrival of angle收稿日期: 2023-06-12;收到修改稿日期: 2023-08-16基金项目: 国家自然科学基金资助项目(62003202);陕西省科学技术协会青年人才托举计划项目(20230513)作者简介: 刘俊妧(1992-),女,陕西汉中市人,工程师,硕士,研究方向为机载电子设备飞行试验。
北航3系课程设计

北航3系课程设计一、课程目标知识目标:1. 学生能够理解并掌握本章节的基础理论知识,如航空航天基本概念、飞行原理等;2. 学生能够了解我国航空航天事业的发展历程,掌握关键历史事件和科技成果;3. 学生能够掌握航空航天领域的相关学科知识,如物理学、数学、工程学等。
技能目标:1. 学生能够运用所学知识分析和解决实际问题,如飞行器设计、飞行器控制等;2. 学生能够通过小组合作、实验操作等形式,培养实践操作能力和团队协作能力;3. 学生能够运用信息技术手段,收集、整理和展示航空航天相关资料。
情感态度价值观目标:1. 学生能够培养对航空航天事业的热爱和自豪感,增强国家意识;2. 学生能够树立科学精神,勇于探索未知,培养创新意识;3. 学生能够养成积极向上的学习态度,自觉遵循学术道德,尊重他人成果。
课程性质:本课程为航空航天科普课程,旨在通过系统的教学活动,使学生掌握航空航天领域的基础知识和实践技能。
学生特点:北航3系学生具备一定的物理、数学基础,对航空航天领域有较高的兴趣和热情。
教学要求:结合学生特点和课程性质,注重理论联系实际,采用多元化的教学手段,提高学生的参与度和兴趣。
同时,关注学生的情感态度价值观培养,使其在学习过程中形成正确的价值观和学术道德观。
通过分解课程目标为具体学习成果,为教学设计和评估提供明确依据。
二、教学内容1. 航空航天基本概念:介绍航空航天定义、分类及其应用,使学生了解航空航天领域的基本知识。
教材章节:第一章 航空航天概述2. 飞行原理:讲解飞行器飞行的基本原理,如升力、推力、阻力等,使学生掌握飞行器飞行的基本规律。
教材章节:第二章 飞行器飞行原理3. 航空航天发展历程:介绍我国航空航天事业的发展历程,关键历史事件和科技成果,培养学生的国家意识和自豪感。
教材章节:第三章 航空航天发展历程4. 航空航天学科知识:讲解航空航天领域涉及的物理、数学、工程学等学科知识,为学生深入探索航空航天领域奠定基础。
北航多源信息融合总复习课
21
.
2.3 分布式融合检测系统
应用贝叶斯法则:
P(H i/u)P(u/P H (iu )P )(H i),(i0,1)
故:
P(H1/u)P(u/H1)P(H1) P(H0/u) P(u/H0)P(H0)
从而最大后验概率融合检测准则也可写为:
P P((uu//H H1 0))P P((H H1 0))?H1:H0
表决融合检验准则
在具有n个传感器的检测网络中,设定一个阈值k, 当存在k个以上的传感器支持某一假设时,则判定 该假设成立。融合准则如下:
u 0
1, 0,
N
i1 N
i1
u u
i i
k k
其中,1k n 法;
当
19
.
k 1
。当 k n 时,为“与”方 时,为“或”方法。
2.3 分布式融合检测系统
.
P ( D1 / H 0 ) p0 ( y )dy R1
P ( D1 / H 1 ) p1 ( y )dy R1
P(D0/H0)1P(D1/H0) P(D0/H1)1P(D1/H1)
2.3 分布式融合检测系统
代入可得平均代价函数如下:
C P 0 C 0 0 P 1 C 0 1 [ P 0 ( C 1 0 C 0 0 ) p 0 ( y ) P 1 ( C 0 1 C 1 1 ) p 1 ( y ) ] d y R 1
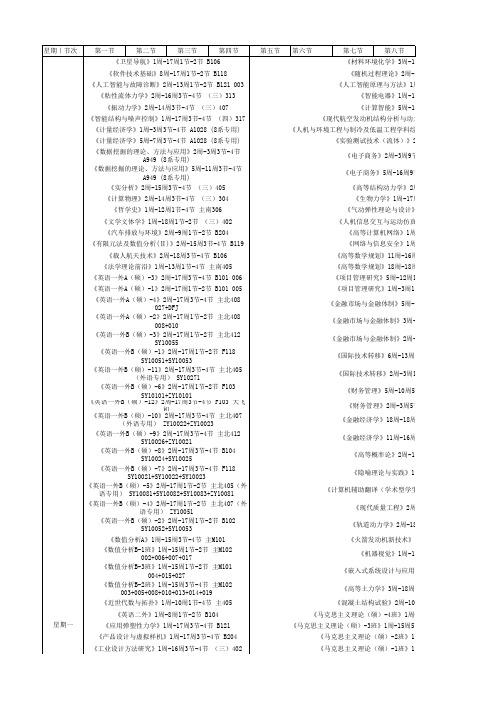
分布式检测结构是目前多传感器检测的主要结构模型
12
.
2.3 分布式融合检测系统
现现象象
Y1
Y1
S1
S1
Y2
Y3
Y2
……
现象
YN
S2
S3
北航多源信息融合信息融合概述PPT教案学习

检测与估计
传 感 器 控 制 /反馈信 息
融合中心
传感器1
预处理
多目标 跟踪器
目 标 状 态
传感器2
预处理
多目标 跟踪器
坐
标
航
ቤተ መጻሕፍቲ ባይዱ
转 换 、 数 据
迹 与 航 迹 相
航 迹 合 成
对
关
正
… …
传感器N
预处理
多目标 跟踪器
第21页/共30页
22
(3) 混合式融合结构
检测与估计
传 感 器 控 制 /反馈信 息
融合中心
传感器1
预处理
多目标 跟踪器
传感器2
预处理
多目标 跟踪器
坐
标
航
转
迹
换
与
、
航
数
迹
据
相
对
关
正
… …
传感器N
预处理
多目标 跟踪器
多路器
选择与 合并
第22页/共30页
目 标 状 态
复 合 滤 波 、 综 合 跟 踪
23
(4)多级式融合结构
分级融合结构中,各局部节点可以同时或分别是集中式、分布式 或混合式的融合中心,系统的融合节点再次对各局部节点传送来 的航迹进行相关和合成。
14
(2)特征级融合
特点
进行了数据压缩, 对通信带宽的要求低 利于实时处理
不足
有信息损失 融合性能降低
第14页/共30页
15
(3) 决策级融合
含义 高层次的融合,每个传感器先基于自己的数据做出决策,然后由融 合中心完成局部决策。
… …
联
传感器1 传感器2
北航信息论讲义(1讲)
甲将一棋子放在某格内,让乙猜测。
1 A B C D E F G H 2 3 4 5 6 7 8
2.1.2 条件自信息量(续)
1.将方格按顺序编号(1,2, „ ,64),让 乙猜测棋子所在格的序号。 2.将方格按行,列编号(如图所示),甲告 诉乙棋子所在行或者列的编号,让乙猜测 位置。 计算乙猜中的信息量。
参考书目
傅祖芸,《信息论-基础理论与应用》,2001 电 子工业出版社
朱雪龙 ,《应用信息论基础》,2003年清华大 学出版社
傅祖芸,《信息理论与编码——学习辅导及精 选题解》,2004年电子工业出版社 陈杰,徐华平,周荫清《信息论习题集》, 2005年清华大学出版社
第一章 绪论
信息的概念 信息、消息与信号 通信系统模型
1 1 log log p ( xi ) p( xi ) p( xi | y j )
自信息量 条件信息量
• 互信息量是一种消除的不确定性的度量。
• 互信息量=先验的不确定性-尚存在的不确定性。
2.2.1 互信息量(续)
二、互信息量的性质
(1)互易性 由事件提供的有关事件的信息量等于由事 件提供的有关事件的信息量。
个既复杂又抽象的概念。
信息概念十分广泛,由于信息科学比起其他学 科(如物理学、化学、数学)还很年轻,人类 对信息的认识还很不够。迄今为止,信息并没
有形成一个很完整的、系统的概念。
不同的研究学派对信息的本质及其定义还没有 形成统一的意见和认识。
1.2.1 通俗的信息概念
信息是一种消息。 这是一种最普遍的概念,是目前社会上最 流行的概念,这个概念好像使人一听就明 白,但不准确。确切地说,这种概念把消 息认为是信息。 信息消息,同一条消息有不同信息量。 例如: 某人收到一条消息 ①包含许多原来不知道的新内容信息量大
2020多源测试信息融合真题及参考答案

2012—2013学年第一学期期末试卷学号__________ 姓名___________________ 成绩____________________考试日期:2013年1月7日考试科目:《多源测试信息融合》(A卷)注意事项:1、闭卷考试,考试时间120分钟;2 、请在答题纸和试卷上写明自己的姓名和学号。
题目:一、简答题(本题共50分,每小题10分)1・简述多源测试系统数据融合的目的和定义。
答:目的:对多源知识和多个传感器所获得的信息进行综合处理,消除多传感器信息之间可能存在的冗余和矛盾,禾I」用信息互补来降低不确定性,以形成对系统环境相对完整一致的理解,从而提高系统智能规划和决策的科学性、反应的快速性和正确性,进而降低决策风险过程。
定义:利用计算机技术,对不同传感器按时序获得的观测信息,按照一定的准则加以自动分析、优化和综合,为完成所需的决策和估计任务而进行的信息处理过程。
2.简述D-S证据理论中,mass函数的定义,什么是焦元和焦元的基?答:(1 )基本置信度指派m是2"[0,1集合的映射,A为2®—子集,记A 2®,且满足:m (一)二0\ Z m (A) =1m (A)也称为假设的质量函数或massi数;(2)若m(A)>0,则称元素A为证据的焦元;焦元中所包含识别框架中的元素个数称为该焦元的基,记作IAI 0( 4 分)3.分布式融合系统常见的融合策略有哪些?(论述其中五个即可得满分)答:常见的融合策略:“与”融合检测准则、“或”融合检测准则、表决融合检测准则、最大后验概率融合检测准则、Neyma n-Pearso融合检测准则、贝叶斯融合检测准则、最小误差概率准则。
4•举例说明D-S证据理论中的0信任冲突悖论答:如果识别框架下的多条证据中的一个证据的某一焦元的基本置信度分配为0,且该焦元与同一证据中其它基本置信度指派值不为0的焦元的交集不是其本身,则无论其它证据对该焦元的基本置信度分配有多大,组合结果中该焦元的基本置信度分配始终为0。